Предлагаемые изобретения относятся к средствам радиолокационного наблюдения траекторий баллистических объектов и могут быть использованы при измерении начальной скорости снарядов.
Известно, что при измерении начальной скорости баллистических объектов широко применяются доплеровские радиолокаторы, осуществляющие их наблюдение на траектории, причем наблюдение начинают через задаваемое время после вылета объекта из ствола орудия.
Для измерения начальной скорости снаряда используют последовательность дискретных значений его текущей скорости, определяемых по реализациям доплеровского эхо-сигнала наблюдаемого снаряда. Эта последовательность представляет “скоростную” траекторию снаряда - закономерность, описывающую изменения скорости снаряда во время его полета.
При вычислении начальной скорости снаряда по дискретным значениям его текущей скорости используют два метода:
- метод экстраполяции, согласно которому предполагают известным вид “скоростной” траектории снаряда, а по дискретным значениям его текущей скорости определяют параметры этой “скоростной” траектории, необходимые для экстраполяции скорости снаряда от начала его радиолокационного наблюдения до момента вылета из ствола орудия (на время начальной задержки tзо);
- метод аппроксимации, согласно которому моделируют “скоростные” траектории снаряда при различных значениях начальной скорости, и, используя критерий наименьших квадратов, находят такую модель, которая максимально совпадает с реальной “скоростной” траекторией снаряда, представленной последовательностью полученных дискретных значений его текущей скорости, а определяемую по этой модели скорость в момент времени t=t0 считают искомой начальной скоростью снаряда.
Известно устройство измерения начальной скорости снаряд методом экстраполяции - заявка Великобритании №1438496. “Доплеровский радиолокатор для измерения скорости” [1].
Известен также способ и устройство для измерения начальной скорости снарядов методом аппроксимации - заявка ЕПВ №277772. “Доплеровский радиолокационный способ и устройство для измерения начальной скорости снаряда” [2].
Одним из основных требований, предъявляемых к измерителям начальной скорости снарядов, является обеспечение высокой точности определения скорости снаряда в момент его вылета из ствола орудия. Однако ни в одном из приведенных измерителей начальной скорости снарядов не учитываются факторы, влияющие на точность измерения начальной скорости снарядов, и не представлены меры по ее повышению.
На точность измерения начальной скорости снаряда влияют многие факторы, главными среди которых являются шумы и флюктуации сигнала, а также несоответствие ожидаемого и фактического времени начала радиолокационного наблюдения снаряда во время его полета.
При отсутствии шумов и флюктуаций сигнала все формируемые дискретные значения текущей скорости снаряда принадлежат его “скоростной” траектории. Однако даже в этом случае как при определении начальной скорости снаряда методом экстраполяции, так и при использовании для этих целей метода аппроксимации имеют место ошибки экстраполяции σ экстр и аппроксимации σ аппр соответственно (ошибки метода).
Из-за шумов и флюктуаций сигнала не все формируемые дискретные значения текущей скорости снаряда совпадают с его “скоростной” траекторией, что приводит к увеличению ошибки измерения, так что результирующую погрешность измерения начальной скорости снаряда для рассматриваемых методов можно представить так:
где  и
и  - результирующая погрешность определения начальной скорости снаряда для методов экстраполяции и аппроксимации соответственно;
- результирующая погрешность определения начальной скорости снаряда для методов экстраполяции и аппроксимации соответственно;
 и
и  - ошибки, определяющие потенциальную точность измерения, получаемую для методов экстраполяции и аппроксимации соответственно (ошибки метода);
- ошибки, определяющие потенциальную точность измерения, получаемую для методов экстраполяции и аппроксимации соответственно (ошибки метода);
σ
Из (1) и (2) следует, что чем больше величина σ 2vфл, тем с большей погрешностью определяется начальная скорость снаряда независимо от метода, используемого при ее вычислении.
Следующим фактором, снижающим точность определения начальной скорости снаряда, является ошибка в установке момента начала наблюдения снаряда на траектории.
Эта ошибка имеет место только при измерении начальной скорости снарядов с применением радиолокаторов.
При вылете снаряда из ствола орудия возникает ионизированное облако, которое экранирует снаряд от радиолокатора. Через некоторое время это облако рассасывается и снаряд может наблюдаться радиолокатором, т.е. может быть получен устойчивый эхо-сигнал снаряда. Величина этого времени задается задержкой tзо начала наблюдения снаряда на траектории.
Для повышения точности измерения начальной скорости снаряда время tзо желательно устанавливать как можно меньше. Но из-за разнообразия применяемых номеров зарядов, а также из-за разброса марок применяемого пороха, фактическое время экранирования снаряда ионизированным облаком отличается от его ожидаемого tзо значения. В результате в начале радиолокационного наблюдения эхо-сигнал снаряда оказывается сильно ослабленным. И только спустя некоторое время Δ tз после tзо, когда снаряд уже не экранируется ионизированным облаком, следуют полноценные реализации его доплеровского эхо-сигнала. Поэтому экстраполяция и аппроксимация скоростной траектории снаряда ведется по установленному времени задержки tзо, не соответствующему фактической задержке tз наблюдения снаряда, что приводит к ошибке решения задачи.
Пусть, например, в измерителе начальной скорости снаряда реализуется метод экстраполяции.
При использовании этого метода в известных баллистических станциях (например [1] и др.) значение начальной скорости снаряда (с учетом задержки tзо начала его наблюдения) определяется по следующим формулам:


где V0 - искомая начальная скорость снаряда;
V(tзо) - текущая скорость снаряда, определенная по данным траекторного наблюдения снаряда в момент времени t=tзо;
а - ускорение снаряда;
β - параметр, характеризующий изменение экспоненты.
Пусть, например, экстраполяция проводится по формуле (3). Пусть установленная задержка начала наблюдения равна tзо и соответствует фактическому началу наблюдения снаряда, т.е. tз=tзо. Тогда необходимые для экстраполяции параметры определяются правильно, т.е. начальная скорость определяется по формуле
V0=V(tзо)+atзо. (5)
Если установленная задержка начала наблюдения снаряда не соответствует фактической, результат измерения начальной скорости изменяется. Пусть, например, фактически устойчивое радиолокационное наблюдение снаряда начинается спустя время tз=tзо+Δ tз, после его вылета из ствола орудия. Тогда скорость снаряда, определяемая по данным его траекторного наблюдения, будет равна
V(tз)=V(tзо)+a Δ tз, (6)
где а - ускорение снаряда.
При этом искомая начальная скорость снаряда V0 получается равной
V0=V(tз)+a tзо=V(tзо)+a Δ tз,+a tзо. (7)
Сравнивая (5) и (7), находим, что из-за указанного несоответствия ожидаемой и фактической задержки начала наблюдения снаряда имеет место ошибка измерения начальной скорости снаряда, определяемая величиной
Δ V0=a Δ tз. (8)
Можно показать, что аналогичная ошибка получается и при экстраполяции скорости снаряда по формуле (4).
При применении метода аппроксимации для представления “скоростной” траектории снаряда используют решения системы дифференциальных уравнений внешней баллистики или применяют следующие формулы:
V(t)=V0+at; (9)
V(t)=V0e-β t. (10)
В практически реализуемых измерителях начальной скорости снаряда обычно используют формулы (9) или (10).
По этим формулам вычисляют значения текущей скорости снаряда V(t) в те же моменты времени t=ti, в которые определяются дискретные значения Vi текущей скорости снаряда, и оценивают близость V(ti) и Vi.
Если фактическое время устойчивого радиолокационного наблюдения снаряда начинается через некоторое время Δ tз после установленного времени tзо, то скорость V(t1) определяют при t1=tзо, а сравнивают с ним дискретное значение текущей скорости снаряда V1, которое было получено при t1=tзо+Δ tз. Таким образом, близость значений V(ti) и Vi оценивается для скоростей снаряда, определенных в различные моменты времени. Скорость снаряда во время его полета постоянно изменяется. Предположим, что снаряд движется равнозамедленно с ускорением а. Тогда сравниваемые значения скоростей V(ti) и Vi будут различаться на величину Δ V0=а Δ tз, а значит такая же ошибка будет иметь место и при измерении начальной скорости снаряда.
Целью данного изобретения является повышение точности измерения начальной скорости снаряда за счет уменьшения ошибок, обусловленных воздействием перечисленных факторов.
Эта цель достигается за счет того, что в способе измерения начальной скорости снаряда, по которому по реализациям доплеровского эхо-сигнала снаряда формируют последовательность дискретных значений его текущей скорости и вычисляют по ним начальную скорость снаряда с учетом установленной задержки начала его наблюдения относительно момента вылета из ствола орудия, для каждой позиции в полученной последовательности значений текущей скорости снаряда оценивают достоверность содержащихся в них данных и, с учетом полученных результатов, выделяют в этой последовательности участок, содержащий преимущественно достоверные данные, по которым определяют начальную скорость снаряда, при этом
- при оценке достоверности данных о текущей скорости снаряда используют критерии, учитывающие задаваемые требования по точности измерения начальной скорости снаряда;
- при формировании участка данных для вычисления начальной скорости снаряда начало этого участка на траектории определяют по наличию не менее трех следующих подряд позиций с достоверными данными, а его конец по наличию двух и более позиций с недостоверными данными;
- используемое при вычислении начальной скорости снаряда время задержки начала наблюдения снаряда представляют суммой установленной задержки и суммарной длительности реализаций доплеровского сигнала, предшествующей первой позиции в участке данных, сформированном для вычисления начальной скорости снаряда;
- при наличии одиночных позиций с недостоверными данными в выделенном участке последовательности значений текущей скорости снаряда, данные, содержащиеся в таких одиночных позициях, заменяют достоверными данными из непосредственно примыкающих к ним позиций выделенного участка.
При этом при оценке достоверности данных о текущей скорости снаряда используют два следующих критерия:
- достоверность данных о текущей скорости снаряда проверяют по превышению фактическим отношением сигнал/шум того его значения, которое необходимо для обеспечения заданной точности определения начальной скорости снаряда;
- достоверность данных о текущей скорости снаряда оценивают по изменениям значений текущей скорости снаряда, представленным на смежных позициях в их полученной последовательности. При этом сначала по величине этих изменений обнаруживают зоны, содержащие недостоверные данные, а затем по достоверным данным, получаемым из позиций, примыкающих к этим зонам, определяют для каждой содержащейся в них позиции ожидаемые значения скорости и локализуют каждую позицию с недостоверными данными, причем достоверными считают те позиции, для которых анализируемые изменения значений текущей скорости снаряда не превышают величину, определяемую задаваемой погрешностью измерения его начальной скорости.
Предлагается устройство для измерения начальной скорости снарядов, содержащее вычислитель, последовательно соединенные доплеровский радиолокатор, формирователь реализаций доплеровского сигнала и формирователь дискретных значений текущей скорости снаряда, а также последовательно соединенные формирователь импульса фотозапуска и таймер, выход которого подключен ко второму входу формирователя реализаций доплеровского сигнала, второй вход таймера соединен с датчиком времени начальной задержки, а третий вход таймера подключен ко второму выходу радиолокатора, в состав которого введены счетчик реализаций, буферное запоминающее устройство, анализатор достоверности данных, формирователь данных для вычисления начальной скорости, измеритель суммарной длительности начальных реализаций и сумматор, при этом один выход формирователя дискретных значений текущей скорости снаряда и выход счетчика реализаций соединены с входами ввода данных буферного запоминающего устройства, вход управления записью которого совместно со счетным входом счетчика реализаций подключен ко второму выходу формирователя реализаций, а выход данных буферного запоминающего устройства соединен со входом анализатора достоверности данных, который через формирователь данных для вычисления начальной скорости подключен к первому входу вычислителя, второй вход которого соединен с сумматором, первый вход которого подключен к датчику времени начальной задержки, а второй вход через измеритель суммарной длительности начальных реализаций соединен со вторым выходом формирователя данных для вычисления начальной скорости.
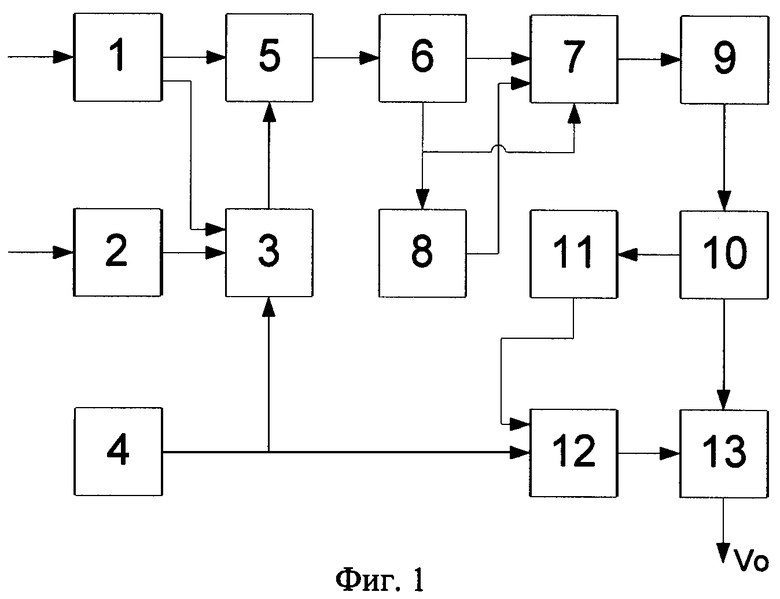
На фиг.1 приведена структурная схема предлагаемого устройства измерения начальной скорости снаряда, где
1 - доплеровский радиолокатор;
2 - формирователь импульса фотозапуска;
3 - таймер;
4 - датчик времени начальной задержки;
5 - формирователь реализаций доплеровского сигнала;
6 - формирователь дискретных значений текущей скорости снаряда;
7 - буферное запоминающее устройство;
8 - счетчик реализаций;
9 - анализатор достоверности реализаций;
10 - формирователь данных для вычисления начальной скорости;
11 - измеритель суммарной длительности начальных реализаций;
12 - сумматор;
13 - вычислитель.
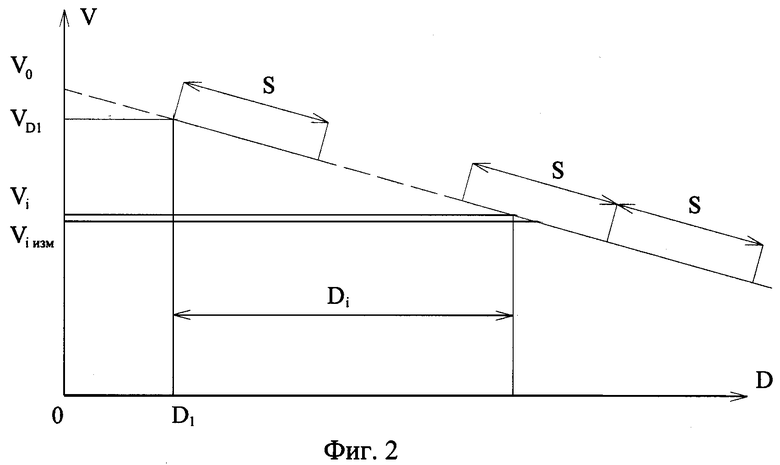
На фиг.2 приведен график изменения скорости снаряда от дальности на начальном участке его траектории.
Сущность измерения начальной скорости снарядов по предлагаемому способу заключается в следующем.
Ранее было показано, что полученные значения текущей скорости снаряда представляют его “скоростную” траекторию и должны максимально принадлежать ей. Но из-за шумов и флюктуаций сигнала отдельные значения текущей скорости снаряда отклоняются от этой траектории, что приводит к ошибке определения его начальной скорости. Для уменьшения этой ошибки предлагается при вычислении начальной скорости снаряда использовать только те значения его текущей скорости, которые максимально близки к его “скоростной” траектории, т.е. те, которые достоверно представляют текущую скорость снаряда.
Оценку достоверности данных о текущей скорости снаряда предлагается проводить по величине отношения сигнал/шум или по изменению смежных значений текущей скорости снаряда.
Значения текущей скорости снаряда на траектории его полета определяют по доплеровской частоте его эхо-сигнала, определенной по реализациям этого сигнала.
По этим значениям доплеровской частоты для каждой реализации доплеровского сигнала вычисляют значения текущей Vi скорости снаряда по известной формуле
Vi=λ Fд/2, (11)
где λ - длина волны зондирующего сигнала;
Fд - значение частоты доплеровского сигнала, определенное на реализации.
В результате таких вычислений получают последовательность значений Vi текущей скорости снаряда.
Из (11) следует, что точность определения значений Vi текущей скорости снаряда во многом определяется ошибкой σ флF измерения частоты Fд доплеровского сигнала.
В соответствии с [3] ошибка σ флF измерения частоты доплеровского сигнала может быть представлена так
σ флF=1/(2π )0,5qTнабл, (12)
где q - отношение сигнал/шум, имеющее место во время формирования реализации;
Тнабл - длительность формируемой реализации доплеровского сигнала.
Определим, при каком отношении сигнал/шум полученное дискретное значение текущей скорости снаряда можно считать достоверным.
В соответствии с (11) погрешность σ флF измерения доплеровской частоты эхо-сигнала снаряда приводит к следующей величине ошибки измерения его текущей скорости
σ vфл=λ σ флF/2, (13)
где λ - длина волны зондирующего сигнала радиолокатора.
Будем полагать, что достоверными являются такие значения текущей скорости снаряда, для которых выполняется условие
σ vфл ≤кσ v0, (14)
где σ Vo - заданная ошибка измерения начальной скорости снаряда;
к=0,1-0,2 - коэффициент, устанавливаемый с учетом требований по точности измерения начальной скорости снаряда.
Из (13) и (14) находим, что требуемая точность измерения начальной скорости снаряда может быть получена при условии, что погрешность σ флF измерения частоты доплеровского сигнала не превышает величины
σ флFоп=2σ vфл/λ =2кσ v0/λ . (15)
Из (12) и (15) получаем, что достоверные значения текущей скорости снаряда могут быть получены при условии, что за время формирования реализации Тнабл имеющееся на ней отношение сигнал/шум qi превышает пороговое значение

Следовательно, при оценке достоверности данных о текущей скорости снаряда можно использовать условие
qi-q0 ≥0. (16)
По этому критерию оценивают достоверность получаемых дискретных значений текущей скорости снаряда и присваивают весовой коэффициент pi=1 реализациям (позициям), где выполняется неравенство (15), и коэффициент рi=0 позициям, где оно не выполняется.
В результате последовательность позиций с дискретными значениями Vi текущей скорости снаряда дополняется последовательностью позиций весовых коэффициентов pi, которые однозначно отображают достоверность содержащихся на этих позициях значений текущей скорости снаряда.
Из полученных данных о текущей скорости снаряда выделяют последовательность тех ее значений, по которым можно вычислять начальную скорость снаряда с заданной точностью.
Начало этой последовательности определяют так.
Начиная с первой позиции (с момента поступления команды на начало радиолокационного наблюдения снаряда, т.е. с момента t=tзо), в их полученной последовательности анализируют значения указанных весовых коэффициентов. Анализ продолжают до тех пор, пока не обнаружат группу из не менее трех следующих подряд позиций, на которых коэффициенты pi=1 (т.е. пока не обнаружат группу из не менее трех следующих подряд позиций с достоверными данными). Эта группа является началом последовательности значений Vi текущей скорости снаряда, по которым ведутся дальнейшие вычисления по определению начальной скорости снаряда. Обозначим номер i первой позиции в этой группе так: i=nнач.
Для определения конца последовательности позиций, по данным которых в дальнейшем вычисляют начальную скорость, начиная с позиции с номером i=nнач+3, продолжают анализ значения весовых коэффициентов до обнаружения группы, содержащей не менее двух следующих подряд позиций с коэффициентом рi=0. Обозначим номер первой позиции в этой группе так: i=nкон.
С учетом принятых обозначений в дальнейших вычислениях используют значения текущей скорости снаряда, содержащихся на позициях с номерами от i=nнач по i=nкон-1.
Однако в выделенной последовательности значений текущей скорости снаряда могут попадаться одиночные позиции, содержащие недостоверные данные. Эти данные предлагается заменять достоверными данными из непосредственно примыкающих к ней достоверных позиций.
Например, пусть на позиции k получено недостоверное значение Vk текущей скорости снаряда. Это значение заменяют величиной Vkиспр, определяемое так
Vkиспр=(Vk-1+Vk+1)/2, (17)
где k - номер одиночной позиции с недостоверными данными;
k-1 и k+1 - номера позиций, непосредственно примыкающий к k-й позиции с недостоверными данными.
Таким образом, в результате проведенных операций получают последовательность значений текущей скорости снаряда, которые достоверно представляют его “скоростную” траекторию. По этим данным, используя метод экстраполяции или аппроксимации, определяют начальную скорость снаряда. Для уменьшения погрешности решения указанной задачи из-за несоответствия установленной и фактической задержки начала наблюдения снаряда, при определении начальной скорости снаряда используют фактическое значение tз задержки начала наблюдения снаряда, которое определяют так:
tз=tзо+Δ tз. (18)
Здесь tзо - установленная задержка начала наблюдения снаряда;
Δ tз - время, определяемое суммарной длительностью реализации, первая из которых начинается с момента t=tзо заданной задержки начала наблюдения, а последняя непосредственно следует перед первой реализацией последовательности, выделенной для вычисления начальной скорости снаряда (до реализации с номером i=nнач).
Очевидно, если время tзо начала радиолокационного наблюдения снаряда совпадает с фактическим началом такого наблюдения, то на всех, начиная с первой, позициях формируются достоверные данные о текущей скорости снаряда, т.е. i=nнач=1. При этом Δ t=0.
Рассмотрим реализацию предлагаемого способа при оценке достоверности данных о текущей скорости снаряда по изменениям смежных значений этой скорости в их полученной последовательности.
Такая оценка основана на том, что фактически для всех снарядов на участке траектории, который пролетает снаряд за время формирования не менее пяти анализируемых реализаций его доплеровского эхо-сигнала, его текущая скорость изменяется линейно. Это подтверждено моделированием и результатами обработки данных, полученных при стрельбе различными снарядами. Поэтому при достоверных измерениях, изменения Δ Vi значений текущей скорости снаряда, получаемых на двух смежных реализациях, можно представить так:
Δ Vi=Vi-Vi+1=Q=const, (19)
где Vi и Vi+1 - значения текущей скорости снаряда, определенные для смежных позиций в их полученной последовательности.
По критерию (19) можно было бы оценивать достоверность получаемых значений текущей скорости снаряда. Однако для использования этого критерия необходимо для каждого типа снаряда, заряда и т.п., и для каждого анализируемого участка траектории (т.е. для всех условий измерения текущей скорости снаряда) знать величину Q, представляющую изменение скорости снаряда на смежных реализациях, что затруднительно.
Поэтому предлагается вместо неравенства (19) анализировать величину
δ Vi=Δ Vi-Δ Vi+1, (20)
где Δ Vi определяется по (19), а
Δ Vi+1=Vi+1-Vi+2. (21)
Для достоверных значений текущей скорости снаряда Δ Vi=Δ Vi+1, так что определяемая по (20) величина δ Vi=0.
Равенство δ Vi=0 выполняется независимо от условий стрельбы, если только входящие в него величины Δ Vi и Δ Vi+1 вычислены по абсолютно точным значениям Vi текущей скорости снаряда. Фактически из-за влияния шумов и флюктуаций сигнала, а также из-за ошибок вычислений, значения Vi не будут абсолютно точно отображать текущую скорость снаряда. Поэтому величина δ Vi будет отличаться от нуля и это различие будет тем больше, чем менее достоверно значения Vi отображают текущую скорость снаряда.
Можно полагать, что существует некоторая погрешность Δ Vдоп в определении значений Vi, при которой можно считать, что Vi достоверно отображают текущую скорость снаряда. Учитывая, что разность (20) может быть как положительной, так и отрицательной, предлагается формировать и анализировать следующую величину:

Неравенство (22) можно считать критерием проверки достоверности формируемых значений Vi текущей скорости снаряда.
Величина Δ Vдоп может быть выражена через допустимую погрешность σ V0 измерения начальной скорости снаряда так:
Δ Vдоп=k σ V0,
где k коэффициент, определяющий допустимую ошибку, обусловленную недостоверностью данных, k=0,1... 0,2.
С учетом изложенного предлагается достоверность получаемых значений текущей скорости снаряда оценивать по выполнению следующего условия:

Из (19), (21) и (22) видно, что неравенство (23) не выполняется, если любое из значений Vi, входящих в эти уравнения, недостоверно. Это значит, что неравенство (23) позволяет только обнаружить зону, содержащую позиции с недостоверными данными, но не дает возможности локализовать конкретную позицию, содержащую такие данные.
При вычислении начальной скорости снаряда необходимо точно знать местоположение всех позиций, по содержащимся на которых значениям скорости Vi ведутся вычисления, а также длительность реализаций, на которых получены эти значения. Поэтому после обнаружения, с использованием неравенства (23), зон с недостоверными данными, необходимо определить в них место, занимаемое позициями с такими данными. Для этого после обнаружения зон с недостоверными данными определяют ближайшие к ним группы, состоящие из не менее трех позиций с достоверными данными (группы, на которых выполняется неравенство (23)). Пусть первая позиция в этой группе имеет номер k (счет номеров ведут от начала формирования реализаций, т.е. от начала наблюдения снаряда). После определения такой группы вычисляют величину Vcp.оп, представляющую собой среднее значение скоростей этой группы, т.е. вычисляют
Vср.оп=(∑ Vi)/3, (24)
где i=к, к+1, к+2;
Vi - значение текущей скорости снаряда, определенное на позициях этой группы.
Кроме этого определяют усредненное значение изменения скорости на этой тройке позиций по формуле
Δ Vср=(∑ Δ Vi)/3, (25)
где i=к, к+1, к+2; 
Затем для каждой позиции из зоны с недостоверными данными вычисляют ожидаемое Voжi на них значение текущей скорости (т.е. ожидаемое для данной позиции достоверное значение текущей скорости) снаряда по формуле
Vожi=Vср.оп+(к-i)Δ Vср, (26)
где i - номер проверяемой реализации, определяющий ее положение во всей сформированной последовательности реализаций;
После этого на каждой из этих позиций проверяют выполнение неравенства

Величина Δ Vпop.oп устанавливается равной
Δ Vпор.оп=(0,2-0,3)σ V0,
где σ V0 - допустимая величина погрешности определения начальной скорости снаряда.
В таблице 1 приведен пример определения достоверности данных о текущей скорости снаряда по изменению ее значений на смежных позициях в полученной их последовательности.
Здесь х, у, z, g изменения скорости, обусловленные мешающими факторами;
Vi - значение текущей скорости снаряда на i-й позиции;
Δ Vi и δ Vi - изменения значений скорости, определяемые по формулам (19)-(21);
Δ V - изменения скоростей в смежных реализациях при отсутствии мешающих факторов;
δ V - величина, характеризующая изменение сравниваемых скоростей, значение которой при достоверных данных близко к нулю, и в таблице 1 в клетках, отображающих недостоверные данные, не приводится;
Δ Voжi - определяемое по (26) ожидаемое значение текущей скорости снаряда;
Δ Vпрi вычисленная по (27) разность между фактическим и ожидаемым для данной позиции значениями текущей скорости снаряда. Для достоверных данных Δ Vпрi=δ V и в таблице 1 для недостоверных данных из-за малости величины | δ V| по сравнению с х, у, z и g, эта величина не приводится;
рi - весовой коэффициент: рi=1 для достоверных данных и рi=0 для недостоверных данных.
Из таблицы 1 видно, что предлагаемое решение позволяет однозначно обнаружить реализацию доплеровского сигнала, дающую недостоверное значение текущей скорости снаряда, а также местоположение позиции с такой скоростью в их формируемой последовательности.
Таким образом, используя формулы (19)-(27) можно определить достоверность каждого получаемого значения текущей скорости снаряда, т.е. можно каждому значению этой скорости установить весовой коэффициент pi=1 для достоверных значений и рi=0 - для недостоверных данных.
В результате, как и в случае определения достоверности по отношению сигнал/шум, последовательность позиций с дискретными значениями текущей скорости снаряда дополняется последовательностью весовых коэффициентов р=1 или р=0, которые однозначно отображают достоверность этих значений скорости снаряда.
В дальнейшем обработка данных по предлагаемому способу ведется так же, как это было представлено для случая применения критерия отношения сигнал/шум, т.е. выполняют следующие операции:
1) выделяют последовательность позиций с достоверными значениями текущей скорости снаряда, для чего
- начиная с первой позиции, анализируют значения указанных коэффициентов до тех пор, пока не обнаружат группу из не менее трех следующих подряд позиций, на которых коэффициент рi=1, и присваивают первой позиции в этой группе номер i=nнач;
- начиная с позиции с номером i=nнач+3 анализируют значения коэффициентов рi, пока не обнаруживают группу из не менее двух следующих подряд позиций с недостоверными данными (с рi=0) и присваивают первой позиции этой группы номер i=nкон;
- по формуле (17) в последовательности позиций с номерами от i=nнач до i=nкон-1 заменяют недостоверные значения текущей скорости снаряда, получаемые на отдельных одиночных позициях, достоверными данными;
2) по формуле (18) вычисляют фактическую задержку tз начала наблюдения снаряда;
3) используя полученные данные и применив метод экстраполяции или аппроксимации, определяют начальную скорость снаряда.
Таким образом, за счет применения предлагаемой оценки достоверности данных о текущей скорости снаряда и уточнения этих данных, а также за счет использования фактической задержки начала наблюдения снаряда, обеспечивается снижение влияния шумов и флюктуаций сигнала, а также ошибок в устанавливаемой задержке начала наблюдения снаряда на точность определения его начальной скорости.
Заявляется устройство, реализующее предлагаемый способ измерения начальной скорости снаряда.
При рассмотрении этого устройства будем полагать, что для определения текущей скорости снаряда формируют реализации, содержащие заданное число периодов доплеровского эхо-сигнала [1] (т.е. используется “базовый” метод обработки доплеровского эхо-сигнала снаряда).
Скорость снаряда линейно убывает по мере его удаления, т.е. текущую скорость снаряда можно представить следующей функцией дальности:
V(D)=V0-β D, (28)
где V0 - искомая начальная скорость снаряда;
β - параметр, характеризующий изменение скорости по дальности;
D - текущая дальность снаряда.
При вычислении начальной скорости V0 снаряда используется метод экстраполяции скорости с использованием формулы
V0=VD1exp(β tз), (29)
где VD1 - скорость снаряда, определенная на момент начала его наблюдения;
β - параметр, характеризующий изменение скорости снаряда на наблюдаемом участке его траектории;
tз - время задержки начала наблюдения снаряда относительно момента вылета его из ствола орудия.
Формула (29) получается из формулы (28) путем перехода из системы координат “скорость дальность” в систему координат “скорость-время”. Такой переход производят следующим образом.
Дифференцируя (28) по дальности, получаем
dV(D)/dD=-β . (30)
Но dD можно представить так:
dD=V(D)dt. (31)
С учетом (31) выражение (30) можно представить так
dV(D)/V(D)=-β dt. (32)
Интегрируя (32) по времени при следующих начальных условиях: t=0, Vt=0=V0, получаем

Отсюда ln(V(D)/V0)=-β t.
При t=tз, V(D)=VD1, а значит
V0=VD1exp(β tз), что и требовалось доказать.
Работа предлагаемого устройства происходит следующим образом.
В момент вылета снаряда из ствола орудия возникает ионизированное облако и вспышка огня, которые воздействуют соответственно на доплеровский радиолокатор 1 и на формирователь 2 импульса фотозапуска. При воздействии этих факторов в радиолокаторе и формирователе 2 формируется импульс, при воздействии любого из которых запускается таймер 3 задержки начала наблюдения траектории снаряда на время tзо, значение которого устанавливается в этот таймер до начала стрельбы из датчика 4 времени начальной задержки.
Спустя время t=tзо по сигналу таймера 3, формирователь 5 реализаций доплеровского сигнала начинает обработку эхо-сигнала снаряда доплеровской частоты Fд, поступающего в него через второй выход радиолокатора 1. Эта обработка заключается в непрерывном счете периодов Тд доплеровского сигнала до тех пор, пока их число не станет равным N. В результате получается реализация длительностью Тi=N Тд.
Такая процедура повторяется при формировании всех реализаций в течение всего времени наблюдения снаряда.
Длительности Тi определяют время tvi пролета снарядом отрезков S (базы) траектории (см. фиг.2), которые независимо от скорости снаряда на траектории имеют одинаковую длину
S=VRNTd=VRNλ /2VR=Nλ /2. (33)
где VR - радиальная составляющая скорости снаряда, которая при наблюдении снаряда непосредственно со створа ствола орудия равна полной скорости снаряда;
λ - длина электромагнитной волны зондирующего сигнала.
Прецизионное измерение времени tvi пролета снарядом отрезков длиной S также проводится формирователем 5. Полученные в этом формирователе значения времен tvi поступают в формирователь 6 дискретных значений текущей скорости снаряда, где для каждой формируемой реализации (участка траектории длиной S) вычисляют средние скорости Vcpi снаряда по формуле
Vсрi=S/tvi, (34)
где tvi - время пролета снарядом i-го отрезка траектории.
Выход формирователя 6 с полученными значениями Vcpi подключен ко входу данных буферного запоминающего устройства 7. К этому же входу подключен выход счетчика 8 реализаций. На счетный вход этого счетчика, а также на вход управления записью буферного запоминающего устройства из формирователя 6 через его второй выход при поступлении каждой реализации выдается импульс. В результате по каждому указанному импульсу значения средней скорости снаряда Vcpi i из формирователя 6 данных о скорости снаряда записываются в запоминающее устройство 7 в соответствии с кодом, содержащимся в счетчике 8, формируя в запоминающем устройстве 7 блок данных реализаций (номер реализации и скорость Vcpi). При этом после записи данных по каждой реализации счетчик 8 увеличивает записанное в нем число (номер реализации) на единицу.
После записи в буферное запоминающее устройство 7 данных всех полученных реализаций (их количество определяется решаемой задачей), наблюдение снаряда на траектории прекращается, а накопленные в запоминающем устройстве 7 данные поступают в анализатор 9 достоверности реализаций.
В анализаторе 9 достоверности реализаций в соответствии с формулами (19)-(23) по скоростям Vcpi оценивают изменения Δ Vi и δ Vi этих скоростей на смежных реализациях и обнаруживают группы позиций (зоны) с недостоверными данными. После этого, в соответствии с предлагаемым способом, с использованием формул (24)-(27), определяют достоверность каждой позиции в обнаруженной зоне. В результате для каждого полученного значения текущей скорости снаряда (для каждой позиции в полученной последовательности этих значений) ставят в соответствие весовой коэффициент р=1 для позиций с достоверными значениями текущей скорости снаряда и р=0 для позиций с ее недостоверными значениями. При этом на выходе анализатора 9 получают три следующие взаимосвязанные последовательности:
- последовательность позиций, содержащих дискретные значения текущей скорости снаряда;
- последовательность позиций, содержащих весовые коэффициенты, характеризующие достоверность указанных значений скорости снаряда;
- последовательность чисел, представляющих одноименные номера позиций в двух названных последовательностях.
Эти данные из анализатора 9 поступают в формирователь 10 массива данных для вычисления начальной скорости V0 снаряда, представляемых в виде участка, выделяемого из полученной последовательности значений его текущей скорости.
В формирователе 10, в соответствии с предлагаемым по данному способу алгоритмом, определяют начало выделяемого участка с указанными данными и обозначают номер первой позиции в этом участке i=nнач.
Протяженность выделенного участка можно ограничить, если не включать в него группы из двух и более следующих подряд позиций с недостоверными данными. Для этого, начиная с позиции с номером i=nнач+3, анализируют весовые коэффициенты до обнаружения группы из не менее двух следующих подряд позиций, на которых коэффициенты р=0, присваивают первой позиции в этой группе номер i=nкон.
Позиции с номерами от i=nнач до i=nкон-1 определяют значения текущей скорости снаряда, которые можно использовать при вычислении его начальной скорости.
Из формирователя 10 данные о длительностях реализаций, соответствующих номерам от i=1 до i=nнач, поступают в измеритель 11 суммарной длительности начальных реализаций, который определяют величину
Δ tсум=∑ tvi,
где tvi - значения времен пролета снарядом измерительных отрезков траектории (баз), с номерами от i=1 по i=nнач. Значение Δ tcум из измерителя 11 поступают в сумматор 12, где совместно с установленной величиной tзо в соответствии с формулой (18) определяет фактическое значение задержки tз начала наблюдения снаряда.
Полученное значение начальной задержки tз поступает в вычислитель tз. В этот же вычислитель из формирователя 10 данных для вычисления начальной скорости поступает выделенная в нем последовательность значений текущей скорости снаряда.
В вычислителе 13 по полученным значениям текущей скорости снаряда вычисляют параметры для экстраполяции скорости снаряда, которыми в соответствии с формулой (29) являются VD1 и β .
Вычисление указанных параметров проводится по следующим формулам:
VD1=(ab-cd)/(be-d2), (35)
β =(ad-ce)/(be-d2), (36)
где
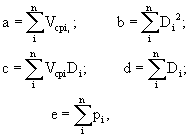
i изменяется от i=nнач; n=(nкон-1);
pi - весовой коэффициент, установленный с учетом достоверности данных о текущей скорости снаряда, который с учетом примененных замен недостоверных данных достоверными значениями текущей скорости снаряда принимает только одно значение рi=1;
Di=(2i-1)S/2 дальность баз, отсчитываемая от начала наблюдения снаряда;
Vcpi - скорость снаряда, определяемая по формуле (34).
По полученным значениям параметров VD1 и β в вычислителе 13 по формуле (29) определяют искомое значение начальной скорости снаряда.
При вычислении параметров для экстраполяции скорости снаряда по формулам (35)-(36) необходимо знать положение на траектории (дальность Di от начала наблюдения снаряда) для каждой позиции, в которой содержатся данные о текущей скорости снаряда. Однако среди выделенной последовательности позиций, содержащих значения текущей скорости снаряда, могут находиться одиночные позиции с недостоверными данными. Длительность S реализации, по которой определяется получаемое на этой позиции недостоверное значение текущей скорости снаряда, будет также недостоверной, что приведет к ошибке определяемых по формуле Di=(2i-1)S/2 дальностей следующих за ней достоверных реализаций.
Для устранения таких искажений предлагается дальность Di достоверной реализации, следующей за указанной недостоверной, определять по следующей формуле:
Di=Di-2+S/2+[(Vcpi-2+Vcpi)/2]tm (37)
где i-1 - номер позиции с недостоверными данными;
Di-2 - дальность позиции с достоверными данными, непосредственно предшествующей указанной позиции с недостоверными данными;
Vcpi-2 и Vcpi - соответственно достоверные значения текущей скорости снаряда, определенные на реализации, непосредственно предшествующей реализации с недостоверными данными и первой (i-й), следующей за ней, реализации с достоверными данными;
tm - время, определенное на недостоверной реализации (длительность недостоверной реализации).
Указанную операцию должен выполнять вычислитель 13 в ходе определения параметров для экстраполяции скорости снаряда.
Предлагаемая структура устройства может быть использована и при оценке текущей скорости снаряда с применением БПФ. Возможны различные модификации схемы устройства, обусловленные вариантами обработки сигналов и данных по предлагаемому способу, однако функциональные элементы, названные в предлагаемой схеме устройства будут неизменны.
Техническая реализация предлагаемого устройства возможна с применением дискретных цифровых элементов и средств вычислительной техники.
По предлагаемому способу и устройству был изготовлен макетный образец измерителя начальной скорости снарядов. Моделирование, а также натурные испытания макета показали его возможность измерять начальную скорость снарядов от 100 до 2000 м/с с относительной погрешностью не более 0,05%.
Литература
1. Заявка Великобритании №1438496, МКИ G 01 S 13/58, НКИ H 41 D, публикация №4450 от 9.06.76 г.
2. Заявка ЕПВ №0277772, МКИ G 01 S 13/58, публикация №32 от 10.08.1988 г.
3. Тузов Г.И. Выделение и обработка информации в доплеровских системах. М.: Сов. радио, 1967 г., с.69.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ СНАРЯДА | 2007 |
|
RU2338220C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2019 |
|
RU2715994C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2392639C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ХАРАКТЕРИСТИК СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2515580C1 |
| СПОСОБ ИСПЫТАНИЙ ЛАЗЕРНОЙ БАЛЛИСТИЧЕСКОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ | 2020 |
|
RU2765137C2 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2020 |
|
RU2757929C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ ВЫСОКОСКОРОСТНЫХ СНАРЯДОВ ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2022 |
|
RU2790640C1 |
| Способ определения траекторий полета снарядов и устройство для его осуществления | 2016 |
|
RU2608349C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2395102C1 |
| Способ определения внешнебаллистических характеристик снарядов и устройство для его осуществления | 2016 |
|
RU2608358C1 |
Изобретение относится к средствам радиолокационного наблюдения траекторий баллистических объектов и может быть использовано при измерении начальной скорости снарядов. Технический результат заключается в повышении точности измерения начальной скорости снаряда за счет уменьшения ошибок. Способ заключается в том, что по реализациям доплеровского эхо-сигнала снаряда формируют последовательность дискретных значений его текущей скорости, в сформированной последовательности определяют достоверность каждого дискретного значения текущей скорости снаряда, а также фактическую задержку начала его радиолокационного наблюдения и, используя упомянутые результаты, выделяют участок в этой последовательности, содержащий преимущественно достоверные данные, по которым определяют начальную скорость снаряда с учетом фактической задержки начала его радиолокационного наблюдения. Устройство, реализующее способ, содержит вычислитель, доплеровский радиолокатор, формирователь реализаций доплеровского эхо-сигнала, формирователь дискретных значений текущей скорости снаряда, формирователь импульса фотозапуска, таймер, счетчик, буферное запоминающее устройство, анализатор достоверности данных, формирователь данных для вычисления начальной скорости, измеритель суммарной длительности начальных реализаций и сумматор. 2 н. и 2 з.п. ф-лы, 2 ил.
| EP 0277772 A2, 28.01.1988 | |||
| GB 1438496, 24.09.1973 | |||
| Способ измерения начальной скорости артиллерийских снарядов | 1939 |
|
SU65074A1 |
| US 3918061, 04.11.1975 | |||
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ОПУЩЕНИЯ И ВЫПАДЕНИЯ АПИКАЛЬНОГО И ПЕРЕДНЕГО ОТДЕЛА ВЛАГАЛИЩА И ЦИСТОТЕЛЕ | 2017 |
|
RU2665960C1 |

