Предлагаемое изобретение относится к радиотехнике и может быть использовано в системах идентификации подвижных объектов, к которым предъявляются требования по повышенной имитоустойчивости.
Известна [1] вторичная радиолокационная система, предназначенная для опознавания подвижных объектов и состоящая из радиолокационной станции, запросчика, включающего шифратор, передатчик, циркулятор, приемопередающую антенну, приемник, дешифратор, блок памяти и блок отображения информации, и ответчик, содержащий приемопередающую антенну, циркулятор, приемник, дешифратор, блок памяти, шифратор и передатчик.
В этой системе передатчик запросчика формирует шифрованные кодированные сигналы, которые излучаются антенной запросчика, принимаются антенной ответчика, усиливаются приемником, дешифрируются и поступают в блок памяти, где сравниваются с кодом, присвоенным объекту, на который установлен ответчик, и при их совпадении шифратор ответчика модулирует передатчик, формирующий кодированный сигнал, который излучается приемопередающей антенной ответчика, принимается приемопередающей антенной запросчика, усиливается приемником, декодируется дешифратором и поступает в блок памяти и на блок отображения информации, на котором отображается код, присвоенный объекту установки ответчика.
Недостатком этой системы является низкая имитоустойчивость, так как коды запросных и ответных импульсов не изменяются и могут быть определены и использованы для дезинформации.
Поэтому в запросчиках применяют сигналы, коды которых синхронно изменяются с кодами ответчика, что повышает имитоустойчивость системы опознавания.
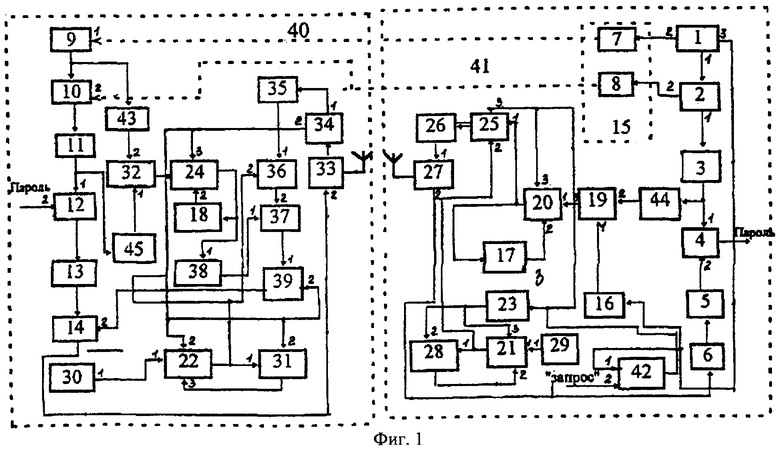
Наиболее близким аналогом (прототипом) по совокупности признаков является система опознавания «свой-чужой» [2], включающая (фиг.1) запросчик 41, в состав которого входят генератор импульсов (ГИ) 1, цифровой счетчик (ЦС) 2, кодовое вычислительное устройство (КВУ) 3, вычитающее устройство (ВУ) 4, второй вход которого подключен к выходу декодера 5 ответного сигнала (ДОС), соединенного с выходом приемника ответного сигнала (ПрОС) 6, синхронизатор по фазе 7, синхронизатор цифрового кода 8, вторая линия задержки 16, первая линия задержки 17, регистр запросного числа 19, первый электронный ключ (ЭК) 20, второй электронный ключ 21, четвертая линия задержки 23, кодер запросного числа (КЗЧ) 25, передатчик (ПРД) 26, антенный коммутатор (АК) 27, счетчик тактовых импульсов (СТИ) 28, генератор тактовых импульсов (ГТИ) 29, схема совпадения (СС) 42, шифровальная колодка (ШК) 44, и ответчик 40, включающий генератор импульсов (ГИ) 9, цифровой счетчик (ЦС) 10, кодовое вычислительное устройство (КВУ) 11, сумматор кодов 12, кодирующее устройство (КУ) 13, передатчик ответного сигнала 14, четвертая линия задержки 18, четвертый электронный ключ 22, третий электронный ключ 24, генератор тактовых импульсов (ГТИ) 30, счетчик тактовых импульсов (СТИ) 31, буферный регистр (БР) 32, антенный коммутатор (АК) 33, приемник запросного сигнала (ПрЗС) 34, декодер запросного числа (ДЗЧ) 35, регистр запросного числа (РЗЧ) 36, сумматор по модулю два 37, регистр пароля (РП) 38, счетчик совпадений (СС) 39, пятая линия задержки (ЛЗ) 43, шифровальная колодка (ШК) 45.
Связи между указанными блоками соответствуют приведенным на фиг.1.
Принцип работы системы состоит в том, что перед использованием объекта, например, самолета, на котором установлен ответчик 40, блоками 7 и 8 запросчика проводным каналом осуществляется синхронизация ГИ 9 и ЦС 10 ответчика сигналами, снимаемыми с выходов ГИ 1 и ЦС 2 запросчика 41. Как показано в [2], если обеспечить относительную стабильность частот, генерируемых ГИ 1 и ГИ 9, порядка 10-7, то в течение 28 ч непрерывной работы после синхронизации ЦС 2 и ЦС 10 будут показывать одинаковые числа, которые поступают соответственно на КВУ 3 и КВУ 11, призванные выполнять последовательность математических и логических операций, обеспечивающих синхронное изменение выходных кодов КВУ 3 и КВУ 11 по случайному закону. Этот код подается через ШК 44 на вход РЗЧ 19.
В режиме запроса, осуществляемом оператором или автоматически, код, записанный в РЗЧ 19, через ЭК 20 и КЗЧ 25 модулирует передатчик 26, колебания которого через АК 27 подводятся к антенне запросчика, излучаются, принимаются антенной ответчика, через АК 33 подводятся к приемнику 34, усиливаются им, декодируются ДЗЧ 35 и поступают через РЗЧ 36 на сумматор по модулю два 37, на вторые входы которого подается код с выхода регистра пароля 38. При совпадении этих кодов СС 39 формирует сигнал, поступающий на второй вход передатчика ответного сигнала 14, передающий код с выхода сумматора 12, представляющий собой сумму кодов с выхода КВУ 11 и кода пароля. Следовательно, передатчик 14 запускается лишь в том случае, если коды, записанные в КВУ 3 и КВУ 11, совпадают. СВЧ колебания передатчика 14 подводятся к АК 33, излучаются приемо-передающей антенной ответчика 40, принимаются антенной запросчика 41, через АК 27 поступают на приемник 6, усиливаются им, декодируются ДОС 5 и поступают на вторые входы ВУ 4, на первые входы которого поступает код с выхода КВУ 3. Таким образом, на выходе ВУ 4 формируется код пароля.
Синхронное изменение по случайному закону кодового числа (кода) на выходах КВУ 3 и КВУ 11 и дополнительное шифрование запросного кода ШК 44 обеспечивают высокую имитоустойчивость этой системы. Как показано в [2], с.10, вероятность Р правильного ответа в единичной попытке распознавания

где m - число символов кода.
Следовательно, выбирая число m, можно обеспечить требуемое значение вероятности Р.
Недостатками этой системы являются необходимость начальной синхронизации генераторов импульсов 1 и 9 и цифровых счетчиков 2 и 10 запросчика и ответчика проводным каналом связи, что не представляется возможным при установке ответчика на ряде подвижных объектов (танках, морских судах и т.п.), и рассинхронизация генераторов импульсов 1 и 9, которая может возникнуть, как уже отмечалось, через 28 ч непрерывной работы даже при высокой относительной стабильности (10-7) частот генераторов импульсов запросчика и ответчика.
Целью предлагаемого изобретения является повышение эффективности системы опознавания объектов за счет исключения начальной синхронизации запросчика и ответчика проводным каналом связи и обеспечения практически непрерывного синхронного режима работы запросчика и ответчика.
Поставленная цель достигается тем, что в известную систему опознавания, включающую запросчик, в состав которого входят кодовое вычислительное устройство, шифровальная колодка, последовательно соединенные кодер запросного числа, передатчик, антенный коммутатор и антенна, последовательно соединенные приемник ответного сигнала, вход которого подключен ко второму выходу антенного коммутатора, декодер ответного сигнала и вычитающее устройство, и ответчик, включающий последовательно соединенные кодовое вычислительное устройство, сумматор кодов, кодирующее устройство, передатчик, антенный коммутатор и антенну, последовательно соединенные приемник запросных сигналов, вход которого подключен ко второму выходу антенного коммутатора, декодер запросного числа, регистр запросного числа, сумматор по модулю два и счетчик совпадений, последовательно соединенные шифровальную колодку и буферный регистр, дополнительно введены: в запросчик последовательно соединенные приемоиндикатор спутниковой радионавигационной системы и преобразователь информации, последовательно соединенные задатчик кода объекта, сумматор кодов, второй вход которого подключен к выходу кодового вычислительного устройства, а выход - к входу шифровальной колодки, выход которой подключен ко второму входу вычитающего устройства и третьему входу кодера запросного числа, первый выход преобразователя информации подключен к первому входу кодового вычислительного устройства и первому входу задатчика кода, второй выход - ко вторым входам кодового вычислительного устройства и задатчика кода, третьему входу сумматора кодов и первому входу кодера запросного числа, третий выход - к третьим входам кодового вычислительного устройства и задатчика кодов, четвертый выход - к четвертому входу сумматора кодов, пятый выход - ко второму входу кодера запросного числа, шестой выход - к четвертому входу кодера запросного числа, а в ответчик введены последовательно соединенные приемоиндикатор спутниковой радионавигационной системы, преобразователь информации и датчик кода объекта, выход которого подсоединен ко второму входу сумматора кодов, вход шифровальной колодки подключен ко второму выходу сумматора кодов, первый выход преобразователя информации подключен к первым входам кодового вычислительного устройства и датчика кода объекта и третьему входу сумматора кодов, второй выход - ко вторым входам кодового вычислительного устройства, датчика кода объекта, регистра запросного числа и буферного регистра и четвертому входу сумматора кодов, третий выход - к третьим входам кодового вычислительного устройства и датчика кода объекта, четвертый выход - к пятому входу сумматора кодов, пятый выход - к третьему входу буферного регистра, шестой выход - к третьему входу регистра запросного числа, седьмой выход - к четвертым входам регистра запросного числа и буферного регистра, восьмой выход - к шестому входу сумматора кодов, а девятый выход - ко второму входу кодового устройства.
Выходом системы является выход вычитающего устройства, содержащий информацию о номере объекта и его координатах.
Сущность предлагаемого изобретения состоит в том, что для обеспечения высокой имитоустойчивости случайное синхронное кодирование запросных и ответных сигналов осуществляется с использованием информации о времени и координатах, получаемой с помощью приемоиндикаторов спутниковой радионавигационной системы, вводимых в состав запросчика и ответчика.
Сравнение заявляемого системы с прототипом показывает наличие вновь вводимых блоков: приемоиндикатора (ПИ) спутниковой радионавигационной системы (СРНС) и преобразователя информации в запросчик и ответчик, задатчика кода и сумматора кодов в запросчик, датчика кода объекта в ответчик.
Введение подобных блоков для повышения имитоустойчивости из общедоступных источников неизвестно, что позволяет сделать вывод о соответствии предлагаемого решения критерию «Новизна».
Вновь введенные блоки известны и описаны в литературе:
- приемоиндикаторы СРНС в [3], с.264-393;
- сумматоры кодов в [4], с.331-334;
- задатчики кода в [5], с.174.
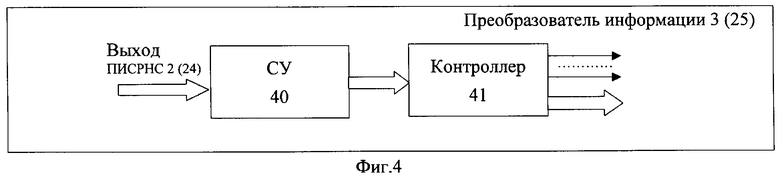
Преобразователь информации может быть выполнен по схеме, приведенной на фиг.4, содержащей широко применяемые согласующее устройство и контроллер, описанный, например, в [6], с.128, 151.
Однако их включение в соответствии с описанными связями дает возможность синхронно перестраивать коды излучаемых запросных и ответных сигналов и повысить тем самым имитоустойчивость системы без применения проводного канала связи между запросчиком и ответчиком.
Такое решение явным образом не следует из уровня техники, что соответствует критерию «Изобретательский уровень».
Сущность предлагаемого изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
- фиг.1 - функциональная схема прототипа;
- фиг.2 - функциональная схема предлагаемой системы;
- фиг.3 - возможная функциональная схема приемоиндикатора спутниковой радионавигационной системы;
- фиг.4 - возможная функциональная схема преобразователя информации;
- фиг.5 - алгоритм работы контроллера запросчика;
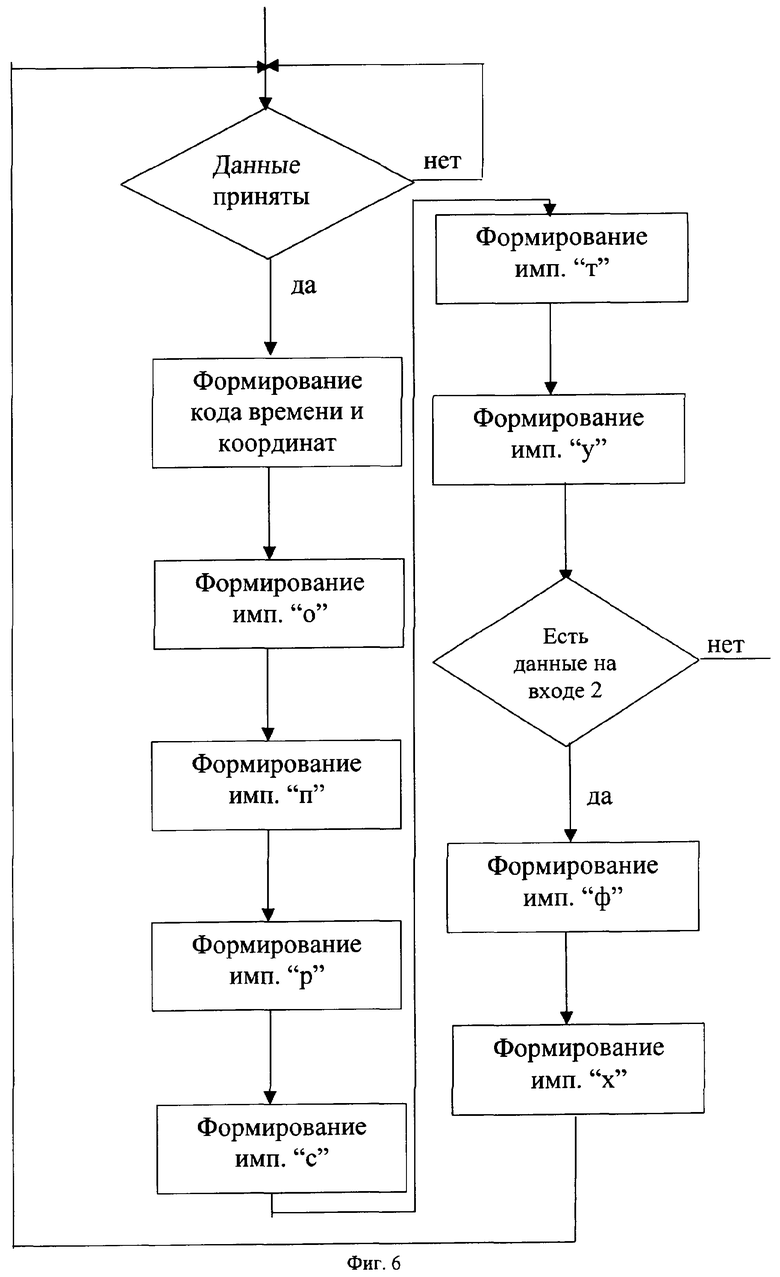
- фиг.6 - алгоритм работы контроллера ответчика;
- фиг.7 - алгоритм формирования запросного сигнала и его декодирования;
- фиг.8 - сигналы, поясняющие принцип работы системы.
Система опознавания представлена на фиг.2, на которой обозначены:
1 - запросчик;
2 - приемоиндикатор спутниковой радионавигационной системы (ПИСРНС);
3 - преобразователь информации (ПИ);
4 - кодовое вычислительное устройство (КВУ);
5 - сумматор кодов (СК);
6 - задатчик кода (ЗК);
7 - шифровальная колодка (ШК);
8 - кодер запросного числа (КЗЧ);
9 - передатчик запросчика (ПрдЗ);
10 - антенный коммутатор (АК);
11 - антенна запросчика (AЗ);
12 - приемник ответного сигнала (ПрОС);
13 - декодер ответного сигнала (ДОС);
14 - вычитающее устройство (ВУ);
15 - ответчик;
16 - антенна ответчика;
17 - антенный коммутатор (АК);
18 - приемник запросного сигнала (ПрЗС);
19 - декодер запросного числа (ДЗЧ);
20 - регистр запросного числа (РЗЧ);
21 - сумматор по модулю два (СМД);
22 - счетчик совпадений (СС);
23 - датчик кода объекта (ДКО);
24 - приемоиндикатор спутниковой радионавигационной системы (ПИСРНС);
25 - преобразователь информации (ПИ);
26 - кодовое вычислительное устройство (КВУ);
27 - сумматор кодов (СК);
28 - шифровальная колодка (ШК);
29 - буферный регистр (БР);
30 - кодирующее устройство (КУ);
31 - передатчик ответчика (ПрдО).
Связи между вышеперечисленными блоками соответствуют приведенным на фиг.2.
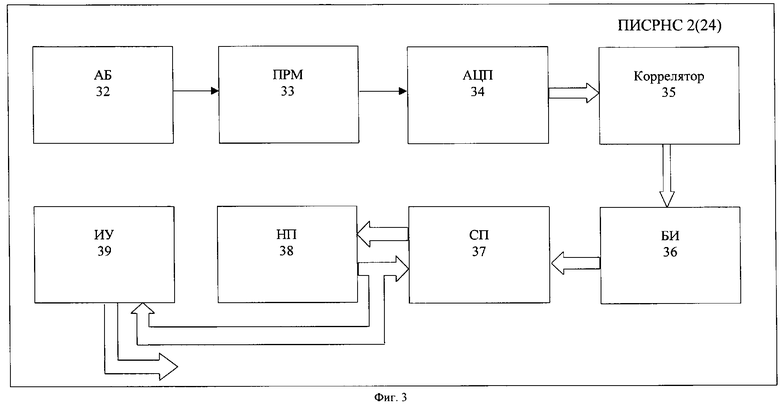
Приемоиндикатор 2 (24) (фиг.3) содержит:
32 - антенный блок (АБ);
33 - приемник (ПРМ);
34 - аналого-цифровой преобразователь (АЦП);
35 - коррелятор;
36 - блок интерфейса (БИ);
37 - сигнальный процессор (СП);
38 - навигационный процессор (НП);
39 - интерфейсное устройство (ИУ).
Связи между указанными блоками соответствуют приведенным на фиг.3.
Преобразователь информации (ПИ) 3 (25) (фиг.4) содержит последовательно соединенные:
40 - согласующее устройство (СУ);
41 - контроллер.
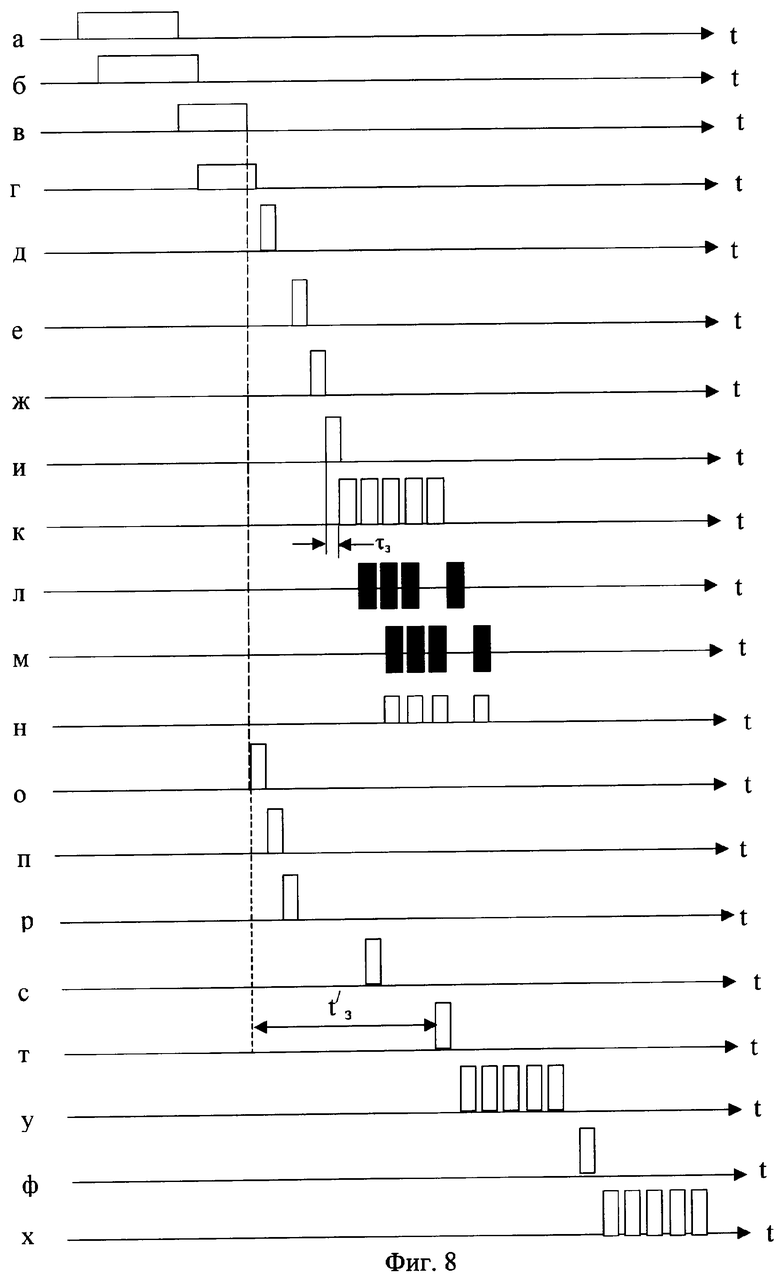
На фиг.8 представлены:
- а - время приема спутниковой информации ответчиком;
- б - время приема спутниковой информации запросчиком;
- в - передача информации в ПИ 25;
- г - передача информации в ПИ 3;
- д - импульс установки в исходное состояние КВУ 4, СК 5, ЗК 6 и КЗЧ 8;
- е - импульс записи информации в КВУ 4 и 3К 6;
- ж - импульс записи информации в СК 5;
- и - импульс записи информации в КЗЧ 8;
- к - импульсы на выходе 6 ПИ 3;
- л - СВЧ импульсы на выходе AЗ 11;
- м - СВЧ импульсы на выходе АО 16;
- н - импульсы на выходе ПрОС 18;
- о - импульс и установки в исходное состояние РЗЧ 20, СС 22, ДКО 23, КВУ 26, СК 27 и БР 29;
- п - импульс записи информации в КВУ 26 и ДКО 23;
- р - импульс записи информации в СК 27;
- с - импульс записи информации в БР 29;
- т - импульс записи информации в РЗЧ 20;
- у - импульсы считывания информации из РЗЧ 20 и ВР 29;
- ф - импульсы записи информации в СК 27;
- х - импульсы считывания информации из КУ 30.
Система работает следующим образом. Сигналы, излучаемые одним из спутников СРНС типа «ГЛОНАСС» или GPS, принимаются (фиг.8) «а» и «б» антенными блоками 32 (фиг.3) ПИСРНС 24 и ПИСРНС 2 соответственно, усиливаются и преобразуются в сигналы промежуточной частоты, которые подаются на аналого-цифровой преобразователь 34, формирующий цифровые коды синусной и косинусной компонент принятого сигнала, поступающие на коррелятор 35, производящий их предварительную обработку, результаты которой через блок интерфейса 36 поступают на сигнальный процессор 37, производящий обработку цифрового сигнала, которая поступает на навигационный процессор 38, определяющий время и координаты объекта. Выходная информация НП 38 через интерфейсное устройство 39 подается в ПИ 23 и ПИ 3, формирующий параллельный код времени и импульсы «д», «е», «ж», «и» и «к». ПИ 3 (25) (фиг.4) содержит согласующее устройство 40, обеспечивающее преобразование выходного кода ПИСРНС в код, принятый для обеспечения работа контроллера 41.
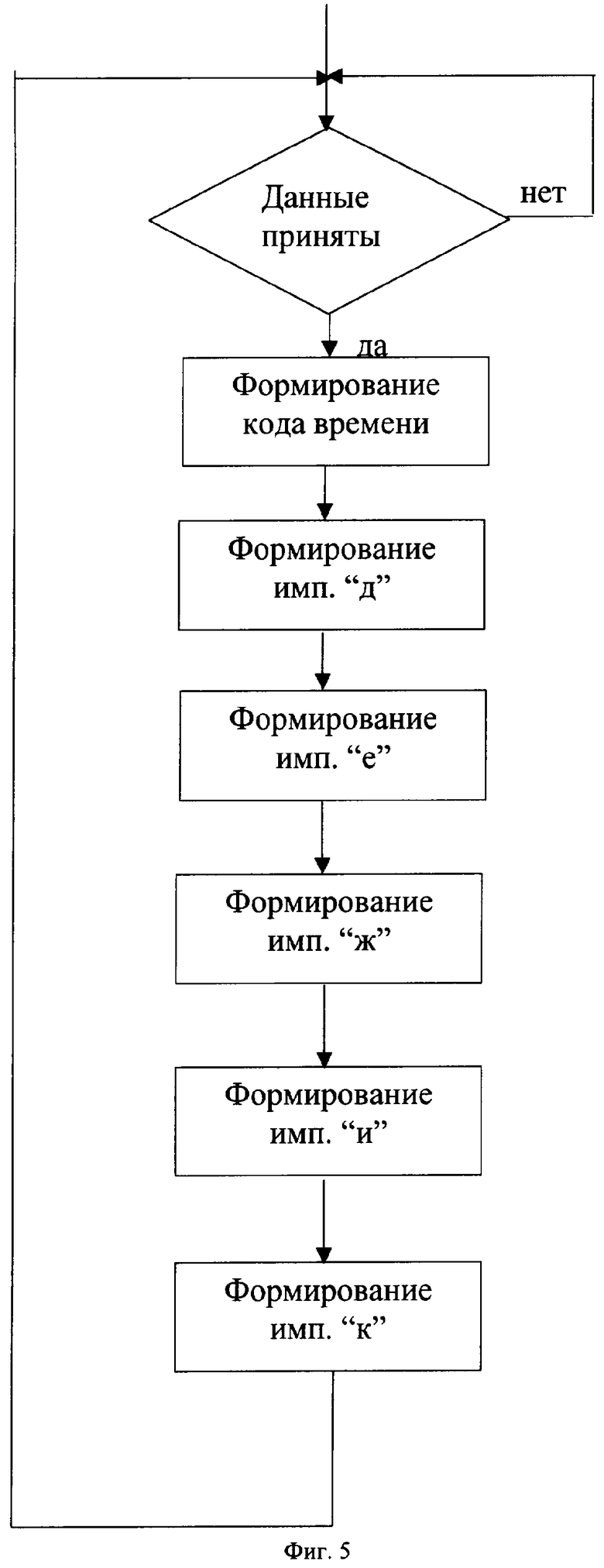
Алгоритмы контроллеров ПИ 3 и ПИ 25 представлены на фиг.5 и 6, соответственно.
Импульсом «д», снимаемым с выхода 2 ПИ 3, блоки КВУ 4, СК 5, ЗК 6 и КЗЧ 8 устанавливаются в исходное состояние. Импульсом «е» с выхода 3 ПИ 3 код времени с выхода 1 ПИ 3 записывается в ЗК 6 и КВУ 4, выполняющее, как и в прототипе, последовательность математических и логических операций, обеспечивающих синхронное изменение выходных кодов КВУ 4 и КВУ 26 по случайному, одинаково изменяющемуся закону.
Выходной код КВУ 4 поступает на входы 2 СК 5, на первые выходы которого с выхода ЗК 6 подаются коды запрашиваемого объекта, который выбирает оператор или задается по программе. Для повышения имитоустойчивости выходные коды ЗК 6 изменяются поступающим на вход 1 кодовым сигналом времени с выхода 1 ПИ 3 при поступлении импульса «е».
Операция суммирования кодов в СК 5 осуществляется импульсом «ж», снимаемым с выхода 4 ПИ 3 и поступающим на вход 4 СК 5.
Выходной код СК 5 через ШК 7, обеспечивающую дополнительную неопределенность в формировании запросного сигнала, подается на вход 3 КЗЧ 8 и записывается в него импульсом «и» с выхода 5 ПИ 3, поступающим на вход 2 КЗЧ 8. Таким образом, записанный в КЗЧ 8 код содержит информацию о времени t и номере запрашиваемого объекта и маркера сигнала.
Импульсы «к», снимаемые с выхода 6 ПИ 3 и задержанные на время τ3, необходимое для принятия информации ПИСРНС 24 ответчика и записи ее в БР 29, поступают на вход 4 КЗЧ 8, выходной сигнал которого осуществляет модуляцию ПрдЗ 9. СВЧ колебания ПрдЗ 9 через АК 10 подводятся к AЗ 11, излучаются, принимаются АО 16 ответчика 15, через АК 17 поступают на вход ПрЗС 18, усиливаются им и декодируются ДЗЧ 19.
Сигналы спутника СРНС принимаются ПИСРНС 24, формирующим информацию о времени t и координатах запрашиваемого объекта, поступающую на ПИ 25, создающему на выходе информацию в виде параллельного кода о плановых координатах, времени и импульсы «о», «п», «р», «с», «т», «у», «ф» и "х". Алгоритм контроллера 40 блока ПИ 25 представлен на фиг.6. Импульсом «о», снимаемым с выхода 2 ПИ 25 и поступающим на вторые входы РЗЧ 20, ДКО 25, СС 22, КВУ 26, БР 29 и четвертый вход СК 27, вышеперечисленные блоки устанавливаются в исходное состояние. Импульсом «п» код времени с выхода 3 ПИ 25 записывается в КВУ 26 и ДКО 23. Импульсом «р», снимаемым с выхода 4 ПИ 25, коды с выходов КВУ 26 и ДКО 23 записываются в СК 27. Суммарный код с его выхода через ШК 28 поступает на вход 1 БР 29 и записывается импульсом «с» с выхода 5 ПИ 25, поступающим на вход 3 БР 29.
Таким образом, в БР 29 записан код времени и код объекта, т.е. тот же код, что и код сигнала, излученного AЗ 11.
Кодовый сигнал запросчика 1 принимается АО 16, через АК 17 поступает на вход ПрЗС 18, усиливается им, декодируется ДЗЧ 19 и в виде параллельного кода поступает на вход 1 РЗЧ 20 и записывается в него импульсом «т», снимаемым с выхода 6 ПИ 25.
Время задержки t3 между импульсами «о» и «т» должно быть таким, чтобы к моменту поступления импульса «т» были приняты и декодированы запросные сигналы, излученные AЗ 11, и определяется как
t3≥t1+t2+tпp+tc,
где t1 - разность времени поступления сигналов спутника на входы ПИСРНС 2 и 24;
t2 - время распространения сигнала между запросчиком и ответчиком;
tпp - время задержки сигнала в приемнике 18 ответчика;
tc - длительность запросного сигнала.
Очевидно, что наибольшее значение

где R - расстояние между запросчиком и ответчиком;
С - скорость света.
Точно также

а 
где α - коэффициент, зависящий от типа приемника;
Δf - полоса пропускания приемника.
Если, например, R=300 км, α=1,37, Δf=5 МГц и tc=50 мкс, то t3≥1+1+0,000262+0,05≈2,05 мс.
Импульсы «у», число которых соответствует числу разрядов запросного кода с выхода 7 ПИ 25, поступают на четвертые входы РЗЧ 20 и БР 29, осуществляя считывание записанных в них кодов, поступающих соответственно на первый и второй входы СМД 21, формирующего импульсы при совпадении разрядов кодов, поступающих на его входы.
Снимаемые с выхода СМД 21 импульсы поступают на вход 1 СС 22, формирующую сигнал логической 1, поступающий на вход 2 ПИ 25, если коды, записанные в БР 29 и РЗЧ 20, совпадают, т.е. если код запросного числа соответствует коду объекта, на котором установлен ответчик. В этом случае ПИ 25 на выходе 8 формирует импульс «ф», который поступает на вход 6 СК 27 и вводит в него дополнительную информацию о плановых координатах объекта, поступающую на вход 3 СК 27. Импульсы «х», сформированные на выходе 9 ПИ 25, поступают на вход 2 КУ 30, модулирующего ПрдО 31, СВЧ, колебания которого через АК 17 подводятся к АО 16 и излучаются. Таким образом, излучаемые антенной ответчика сигналы содержат информацию о коде и координатах объекта, на котором установлен ответчик. Эти сигналы принимаются AЗ 11, усиливаются ПрОС 12, декодируются ДОС 13 и поступают на вход 1 ВУ 14, на выходе которого формируется информация о координатах объекта, на котором установлен ответчик.
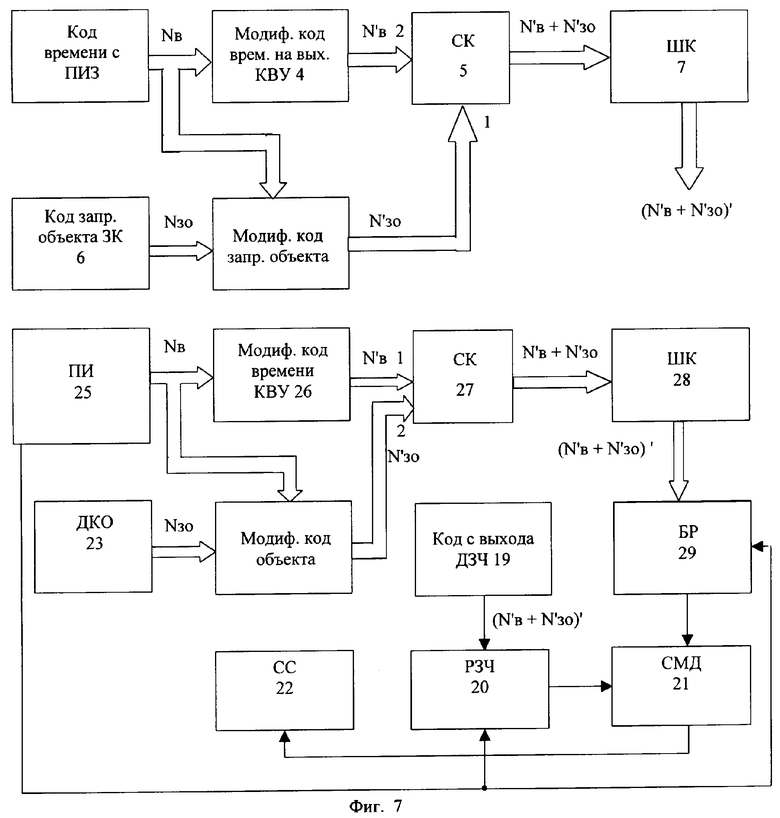
Процесс передачи, приема и сравнения принятой и записанной в ВУ 14 информации поясняется фиг.7, из которой следует, что код времени Nв с выхода 1 ПИ 3 модифицируется КВУ 4 в код N'30 и поступает на второй вход сумматора кодов 5, на первый вход которого подается код N'30, представляющий собой код модифицированный запрашиваемого объекта N30. Суммарный код NΣ=N'в+N'30 поступает на шифровальную колодку 7, обеспечивающую дополнительную неопределенность и формирующую на выходе код (N'в+N'30)', осуществляющий модуляцию передатчика 9.
В ответчике принятый код времени Nв с выхода 1 ПИ 25 поступает на вход 1 КВУ 26, формирующего на выходе модифицированный код N'в, и на первый вход ДКО 23, в котором записан код объекта N30. Снимаемые с выхода ДКО 23 модифицированный код N'30 и код N'в с выхода КВУ 26 поступают на сумматор кодов 27, на выходе которого формируется код (N'30+N'в), который модифицируется ШК 28 в код (N'в+N'30)' и поступает на БР 29. Таким образом, в РЗЧ 20 и БР 29 оказываются записаны одинаковые коды. Поэтому после их сравнения в СМД 21 СС 22 выдает сигнал на передачу информации, содержащей коды (N'о+N'30)' коды плановых координат объекта.
Эта информация передается ответчиком, принимается и обрабатывается запросчиком и поступает на первый вход ВУ 14, на второй вход которого поступает код с выхода ШК 7. Поскольку ответчик передает суммарный сигнал, содержащий коды (N'в+N'30)' и коды координат объекта, а на первый вход ВУ 14 поступают коды (N'в+N'30)', то на выходе ВУ 14 формируется код, содержащий информацию о координатах объекта, которая поступает на выход запросчика и сравнивается с информацией о координатах объекта, полученных с помощью бортовой радиолокационной станции, установленной в непосредственной близости с запросчиком.
Объект считается идентифицированным, если его координаты, полученные вышеуказанными способами, совпадают.
Применение предлагаемого технического решения по сравнению с прототипом позволяет отказаться от использования проводного канала для начальной синхронизации генераторов импульсов запросчика и ответчика и обеспечивает практически бесконечное время синхронного изменения по случайному закону кодов запросного и ответного сигналов, что обеспечивает высокую имитоустойчивость предлагаемой системы, особенно в условиях организованной разведки.
Система может быть реализована.
Как показано в [3], с.210-211, в первой строке кадра навигационного сообщения, передаваемого каждым навигационным спутником навигационной системы ГЛОНАСС, содержится информация о времени начала кадра внутри текущих суток (пять старших разрядов передают число целых часов, шесть средних - число средних минут, младший разряд - число тридцати секундных интервалов). Для повышения имитоустойчивости можно дополнительно использовать информацию об х - вой составляющей вектора скорости (24 разряда) и х-ой координате n-го навигационного спутника (27 разрядов).
Таким образом, используя только первую строку кадра навигационного сообщения, можно получить изменяющуюся информацию в виде 63 разрядов, которую можно использовать в запросчике и ответчике и передавать ее на вход кодовых вычислительных устройств вместо информации, снимаемой с выходов цифровых счетчиков 2 и 10 в прототипе.
Предлагаемая система опознавания может быть использована, например, для идентификации судов, осуществляющих лицензионный лов рыбы в территориальных водах Российской Федерации (РФ), на которые должны быть установлены описанные выше ответчики. Необходимость такой идентификации вызвана тем, что ежегодные потери РФ из-за незаконного отлова рыбы превышают 700 млн. долларов США [7], с.6-10.
Если ответчик устанавливается на судах морского флота, то может быть использован приемоиндикатор типа НАВИС СН 3102, обеспечивающий измерение времени с погрешностью не более 0,1 мкс [3], с.380-381.
В запросчике может быть использован приемоиндикатор ЛИДЕР, обеспечивающий измерение времени с погрешностью не более 0,1 мкс [3], с.389-390.
Пользуясь сведениями, приведенными в материалах заявки, можно разработать и изготовить, используя отечественную элементную базу, системы идентификации подвижных объектов, обладающие высокой имитоустойчивостью, которые можно использовать в народном хозяйстве и военной технике.
Литература
1. Вторичная радиолокационная система. Авторское свидетельство СССР (SU) 3 1309754 по заявке на изобретение №39456 0/00-09 (22) от 22.08.85 г. Изобретения стран мира, №22, вып.85, МКИ G 01 R, RS, 1992 г., с.23.
2. Система опознавания «свой-чужой» Патент РФ №2191403 по заявке 2001133283/09 от 11.12.2001, кл.G 01 S 13/78, 13/74.
3. Глобальная спутниковая радионавигационная система ГЛОНАСС. 2-ое издание, под редакцией В.Н.Харисова, А.И.Перова, В.А.Болдина. - М.: ИПРЖР, 1999, с.380-381, 389-390.
4. У. Титце, К.Шенк. Полупроводниковая схемотехника. - М.: Мир, 1982, с.331-334.
5. З. Соботка, Я. Стары. Микропроцессорные системы. - М.: Энергоиздат, 1981, с.174.
6. Боборыкин А.В. и др. Однокристальные микроЭВМ. - М.: Микап, 1994, с.128, 151.
7. Моисеев B.C. и др. Разработка радиоэлектронной системы контроля зон рыболовства.//Электронное приборостроение. Выпуск 3 (19), 2001, с.6-10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2001 |
|
RU2191403C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ СУДОВ В АКВАТОРИИ ПОГРАНИЧНОЙ ЗОНЫ | 2019 |
|
RU2714614C1 |
| СИСТЕМА ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2000 |
|
RU2189610C1 |
| СПОСОБ ПОСТРОЕНИЯ СИСТЕМЫ ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" НА ОСНОВЕ ПРОТОКОЛА С НУЛЕВЫМ РАЗГЛАШЕНИЕМ | 2014 |
|
RU2570700C1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 1990 |
|
RU1773191C |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ И ПЕРЕДАЧИ ИНФОРМАЦИИ В ОТВЕТНОМ КАНАЛЕ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ОПОЗНАВАНИЯ | 2013 |
|
RU2543514C2 |
| Способ построения системы опознавания "свой-чужой" на основе протокола с нулевым разглашением, реализованный в модулярном коде | 2018 |
|
RU2713511C1 |
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
| Вторичная радиолокационная система | 1985 |
|
SU1309754A1 |
Предлагаемое изобретение относится к радиотехнике и может быть использовано при проектировании систем, идентификации подвижных объектов, к которым предъявляются требования по повышенной имитоустойчивости. Сущность предлагаемого изобретения состоит в том, что для обеспечения высокой имитоустойчивости случайное синхронное кодирование запросных и ответных сигналов осуществляется с использованием информации о времени и координатах, получаемой с помощью приемоиндикаторов спутниковой радионавигационной системы, вводимых в состав запросчика и ответчика. Достигаемый технический результат: повышение эффективности системы опознавания за счет исключения проводного канала, необходимого в прототипе для начальной синхронизации генераторов импульсов запросчика и ответчика, и обеспечение длительного имитоустойчивого запроса и передачи объектом информации о своих координатах в ответном сигнале. 8 ил.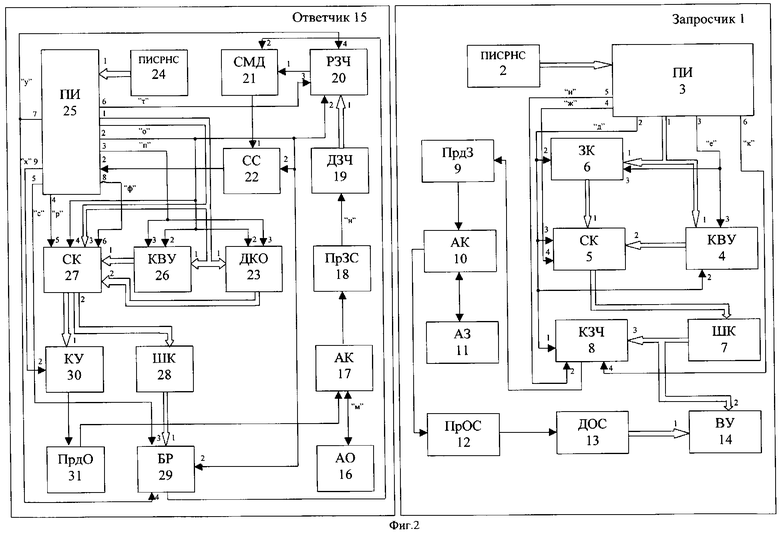
Система опознавания подвижных объектов, включающая запросчик, в состав которого входят кодовое вычислительное устройство, шифровальная колодка, последовательно соединенные кодер запросного числа, передатчик, антенный коммутатор и антенна, последовательно соединенные приемник ответного сигнала, вход которого подключен ко второму выходу антенного коммутатора, декодер ответного сигнала и вычитающее устройство, и ответчик, включающий последовательно соединенные кодовое вычислительное устройство, сумматор кодов, кодирующее устройство, передатчик, антенный коммутатор и антенну, последовательно соединенные приемник запросных сигналов, вход которого подключен ко второму выходу антенного коммутатора, декодер запросного числа, регистр запросного числа, сумматор по модулю два и счетчик совпадений, последовательно соединенные шифровальную колодку и буферный регистр, отличающаяся тем, что дополнительно введены в запросчик последовательно соединенные приемоиндикатор спутниковой радионавигационной системы и преобразователь информации, последовательно соединенные задатчик кода объекта, сумматор кодов, второй вход которого подключен к выходу кодового вычислительного устройства, а выход - к входу шифровальной колодки, выход которой подключен ко второму входу вычитающего устройства и третьему входу кодера запросного числа, первый выход преобразователя информации подключен к первому входу кодового вычислительного устройства и первому входу задатчика кода, второй выход - ко вторым входам кодового вычислительного устройства и задатчика кода, третьему входу сумматора кодов и первому входу кодера запросного числа, третий выход - к третьим входам кодового вычислительного устройства и задатчика кодов, четвертый выход - к четвертому входу сумматора кодов, пятый выход - ко второму входу кодера запросного числа, шестой выход - к четвертому входу кодера запросного числа, а в ответчик введены последовательно соединенные приемоиндикатор спутниковой радионавигационной системы, преобразователь информации и датчик кода объекта, выход которого подсоединен ко второму входу сумматора кодов, вход шифровальной колодки подключен ко второму выходу сумматора кодов, первый выход преобразователя информации подключен к первым входам кодового вычислительного устройства и датчика кода объекта и третьему входу сумматора кодов, второй выход - ко вторым входам кодового вычислительного устройства, датчика кода объекта, регистра запросного числа, счетчика совпадений и буферного регистра и четвертому входу сумматора кодов, третий выход - к третьим входам кодового вычислительного устройства и датчика кода объекта, четвертый выход к пятому входу сумматора кодов, пятый выход - к третьему входу буферного регистра, шестой выход - к третьему входу регистра запросного числа, седьмой выход - к четвертым входам регистра запросного числа и буферного регистра, восьмой выход - к шестому входу сумматора кодов, а девятый выход - ко второму входу кодового устройства, при этом счетчик совпадений формирует сигнал, поступающий на второй вход преобразователя информации, код буферного регистра поступает на второй вход сумматора по модулю два.
| СИСТЕМА ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2001 |
|
RU2191403C1 |
| СИСТЕМА ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2000 |
|
RU2189610C1 |
| US 6137623 А, 24.10.2000 | |||
| US 5500621 А, 19.03.1993. | |||

