Изобретение относится к летательным аппаратам легче воздуха. В качестве аналогов изобретения необходимо назвать следующие: RU 2001113005, 2003.06.10. Безбалластный дирижабль содержит изолированные емкости с подъемным газом, размещенные по разные стороны поперечной плоскости, проходящей через центр тяжести полой опорной балки коробчатого сечения, размеры которой определяют исходя из установленного нормированного ряда ее типоразмеров для аппаратов требуемых мощностей и предназначений. Каждая емкость содержит оборудование для автономного управления подъемной силой. Их собирают из легкосъемных унифицированных модулей в виде цилиндрических тонкостенных емкостей из металла, соединяемых на одной оси с небольшим зазором между собой с помощью металлической ленты и потайных винтов. Внутри каждой емкости вмонтированы основная и аварийная воздушные цилиндрические подушки, соединенные с атмосферой внутри опорной балки через пневмомагистрали и электропневмоклапаны. Остальное пространство внутри емкости занимают шары, наполненные гелием. Подушки и шары размещают в сетке, которая удерживает их в случае разрушения металлического модуля и передает подъемную силу шаров на опорную балку, к которой крепят сетку. На концах опорной балки крепят модули конической формы переднего (тянущего) и заднего (толкающего) силовых агрегатов с пневмоприводами для отклонения вектора тяги винтов этих агрегатов в пределах выбранного телесного угла, обеспечивающего требуемую маневренность аппарата. К нижней полке опорной балки спереди крепят кабину пилотов с приборами и системами управления и контроля, а сзади - технический модуль с компрессором управляющего воздуха и резервным мотор-генератором, а также пневмоприводом для управления рулевой емкостью, закрепленной вместе с пневмоприводом на задней стенке технического модуля. Между последней и кабиной пилотов к опорной балке крепят функциональные модули, определяющие выбранное предназначение дирижабля, а также его посадочные опоры.
Существенным признаком заявляемого изобретения, совпадающим с признаком аналога, является использование изолированных емкостей с автономньм управлением подъемной силой.
Среди причин, препятствующих получению технического результата аналога, можно назвать следующие: во-первых, исполнение емкости аналога не представляется оптимальным с точки зрения конструкции, технологии сборки/разборки, эксплуатации и хранения, а самое главное их веса. Применение цилиндрических тонкостенных емкостей из металла, воздушных подушек, шаров с гелием и сетки увеличивает общий вес емкости. Сами же шары не заполняют полностью внутренний объем емкости и образуют пустоты между собой, что приводит к увеличению размеров и, следовательно, веса емкости.
Во-вторых, жесткость опорной балки коробчатого сечения будет падать с увеличением ее размеров. Применение же шпангоутов и стрингеров приведет к существенному росту веса балки.
В-третьих, расположение силовых агрегатов на концах опорной балки приведет к снижению маневренности дирижабля, а отклонения вектора тяги винтов этих агрегатов не всегда сможет компенсировать влияние бокового ветра при большой парусности дирижабля. Модули конической формы для крепления переднего и заднего силовых агрегатов, а также пневмоприводы для отклонения вектора тяги винтов, лишь увеличивают вес дирижабля.
В-четвертых, эффективность переднего силового агрегата будет существенно снижена из-за сопротивления воздушному потоку от его винта опорной балки, передней емкости, функционального модуля, определяющего выбранное предназначение дирижабля, и посадочной опоры, размеры и вес которой будут возрастать с увеличением диаметра винта и габаритов функционального модуля. При этом прочность опоры будет падать, что может привести к росту числа аварий при посадке дирижабля.
В-пятых, проблематичен поиск изготовителя, готового принять в разработку, производство и обслуживание ограниченного числа силовых агрегатов большой мощности. Мощности существующих силовых агрегатов может оказаться не достаточно для транспортировки крупногабаритных и тяжелых грузов. Изменение же компоновки под существующие силовые агрегаты приведет к увеличению веса дирижабля.
RU 2001104560, 2003.04.10. Способ управления подъемной силой дирижабля откачиванием или закачиванием воздуха, отличающийся тем, что для управления подъемной силой перекачивают одну и ту же массу несущего газа из основного газовместилища, сжимая его во внутреннем меньшего объема газовместилище для уменьшения подъемной силы, или производят рекомпрессию несущего газа обратно из внутреннего газовместилища в основное газовместилище для увеличения подъемной силы дирижабля, аэростата.
Существенным признаком заявляемого изобретения, совпадающим с признаком аналога, является способ управления подъемной силой дирижабля путем перекачивания несущего газа из оболочек во вспомогательные емкости и обратно.
RU 99105218, 2001.02.10. Безбалластный дирижабль, содержащий основную камеру постоянного объема, наполненную несущим газом, сообщающуюся с ней дополнительную камеру переменного объема, соединенную своей верхней частью с нижней частью основной камеры, устройство для изменения объема дополнительной камеры и, тем самым, давления газа в обеих камерах, гондолу, прикрепленную к нижней части дополнительной камеры, и устройства для горизонтального перемещения дирижабля, отличающийся тем, что дополнительная камера выполнена с горизонтально гофрированными стенками, а устройство для изменения объема дополнительной камеры состоит из установленных в гондоле лебедок с намотанными на барабаны тросами, при этом свободные концы тросов прикреплены к верхней части дополнительной камеры.
Существенным признаком заявляемого изобретения, совпадающим с признаком аналога, является выполнение оболочек гофрированной формы, идентичной форме дополнительной камеры.
Среди причин, препятствующих получению технического результата аналога, можно назвать следующие: во-первых, отсутствие жесткой связи между основной и дополнительной камерами приведет к маятниковому колебанию последней, что затруднит управление дирижаблем.
Во-вторых, наличие только одного устройства для горизонтального перемещения дирижабля в данной компоновке существенно снизит маневренность последнего. Кроме того, такая компоновка нарушит балансировку дирижабля, что опять же затруднит управление им и снизит безопасность полета.
В-третьих, при отказе одной из лебедок возникнет перекос дополнительной камеры и гондолы. Если лебедки используют ручной привод, то количество членов экипажа должно быть не меньше количества лебедок. Кроме того, лебедки с ручным приводом больше по размеру и весу лебедок с электрическим приводом, которым необходим источник электроэнергии - аккумулятор и/или генератор, встроенный в устройство для горизонтального перемещения дирижабля.
В-четвертых, с ростом размеров основной камеры возникают проблемы хранения и транспортировки дирижабля в разобранном виде.
Для решения задач, направленных на снижение веса дирижабля, технологических и эксплуатационных затрат, повышение маневренности и безопасности его полетов, расширение диапазона весов и габаритов транспортируемых грузов, применен принцип модульной сборки дирижабля и унификации его отдельных компонентов.
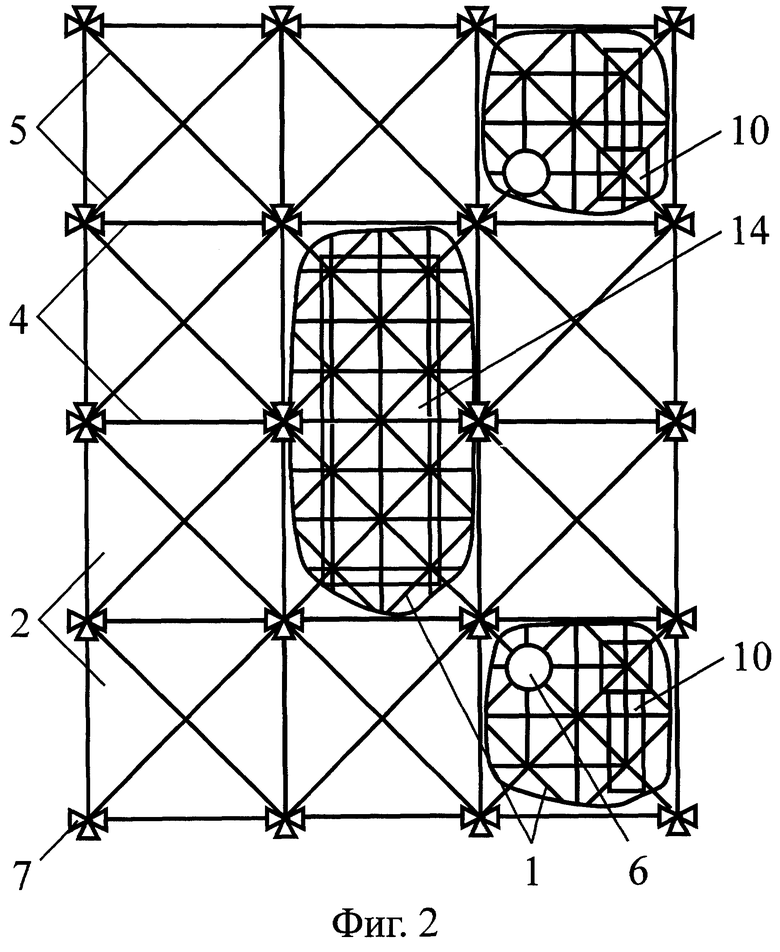
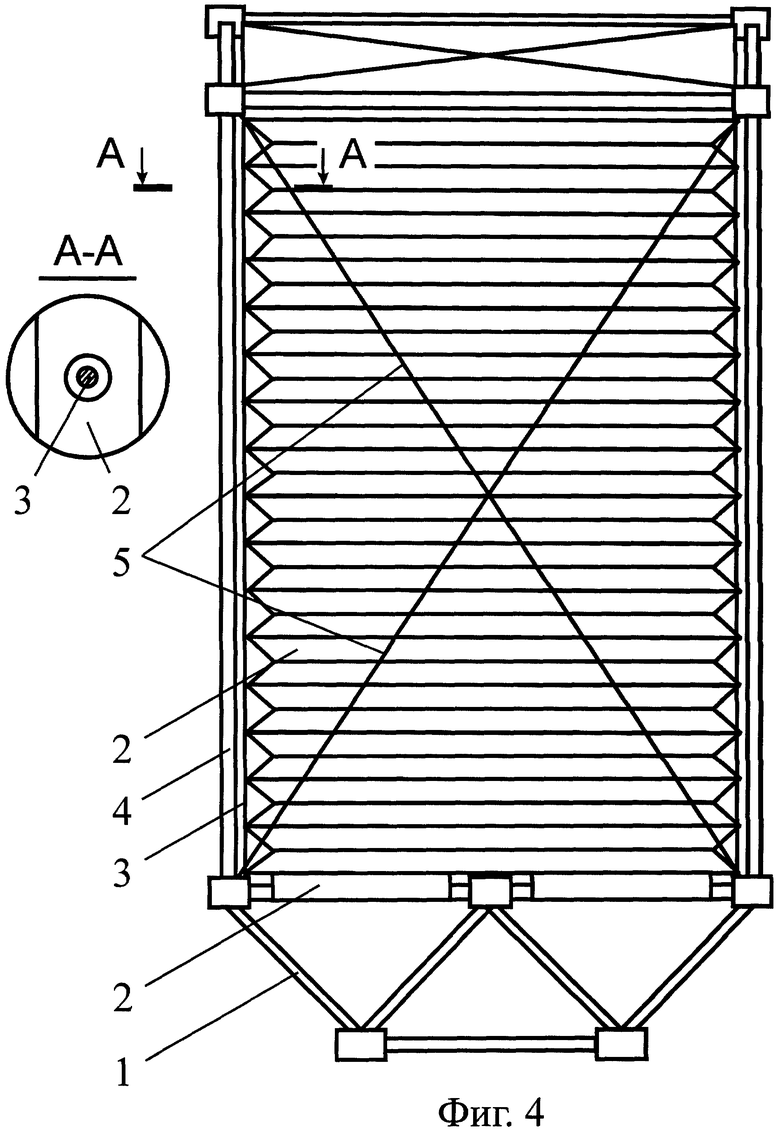
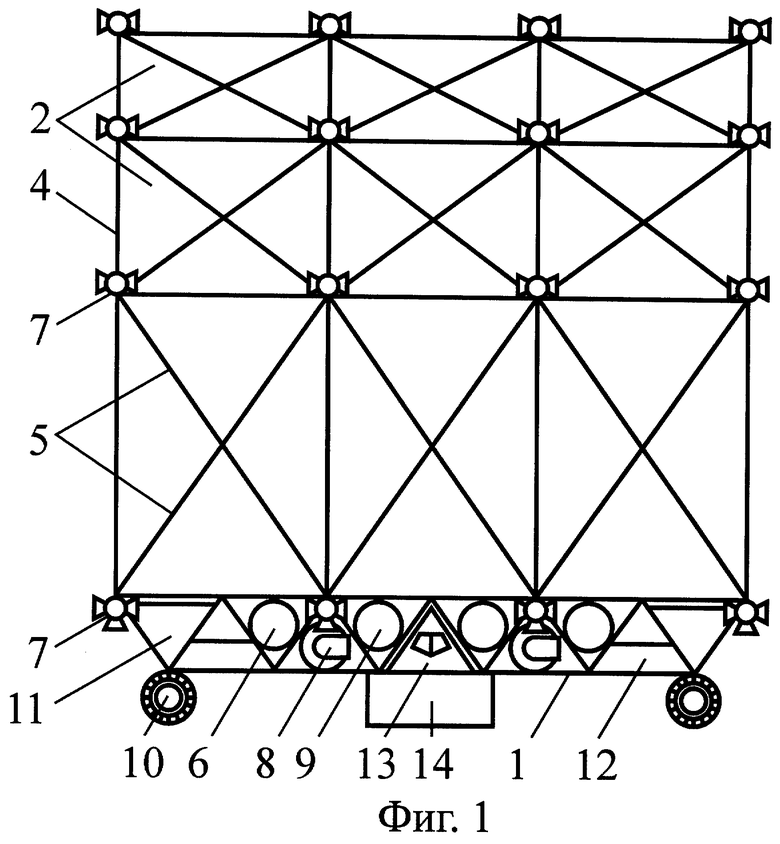
На фиг.1-2 представлены вид спереди и вид сверху одного из вариантов конструкции дирижабля. Пространственная ферма 1 из композитного материала собрана из одинаковых шарнирно-стержневых пирамидальных модулей с квадратными основаниями (фиг.3). К верхним стержням фермы 1 внахлест прикреплены изолированные гофрированные оболочки 2 с возможностью трансформации вдоль продольных расчалок 3 (фиг.4) при закачивании или выкачивании гелия. Оболочки 2 выполнены из ткане-пленочного материала с низкой газопроницаемостью. Их охватывают каркасы 4 из композитного материала, которые также собраны из шарнирно-стержневых модулей и закреплены резьбовыми соединениями в верхних шарнирах фермы 1. Для увеличения жесткости каркасов 4 и удержания внутри них оболочек 2 на боковых сторонах и основаниях каркасов 4 натянуты диагональные расчалки 5. Расчалки 3 и 5 крепят к верхним шарнирам фермы 1 и каркасов 4.
Внутри фермы 1 установлены армированные композитным материалом основные емкости 6 со сжатым гелием для компенсации его утечки. В верхних шарнирах фермы 1 и каркасов 4 закреплены резьбовыми соединениями газоструйные рули 7, предназначенные для точного маневрирования дирижаблем. В нижних шарнирах фермы 1 установлены газотурбинные насосы 8 для перекачивания гелия из оболочек 2 в армированные композитным материалом вспомогательные емкости 9, к рулям 7 и для экстренного сброса гелия из оболочек 2. Вертикальные стержни каркасов 4 предназначены также для перекачивания насосами 8 гелия к рулям 7, закрепленным в верхних шарнирах каркасов 4, а для перекачивания насосами 8 гелия к рулям 7, закрепленным в верхних шарнирах фермы 1, введены газопроводы. В газопроводах и рулях 7 установлены перепускные электроклапаны.
Снизу в носовой и кормовой части фермы 1 в шарнирах закреплены не менее четырех турбореактивных двигателей 10 попарно турбинами навстречу друг другу. Внутри каждого двигателя 10 на одной оси с валом турбины встроены электрогенераторы - основные источники электроэнергии.
Кроме того, внутри фермы 1 в шарнирах установлены топливные баки 11, резервные электрические аккумуляторы 12 и кабина пилотов 13. В центральной части фермы 1 к нижним шарнирам прикреплен груз 14.
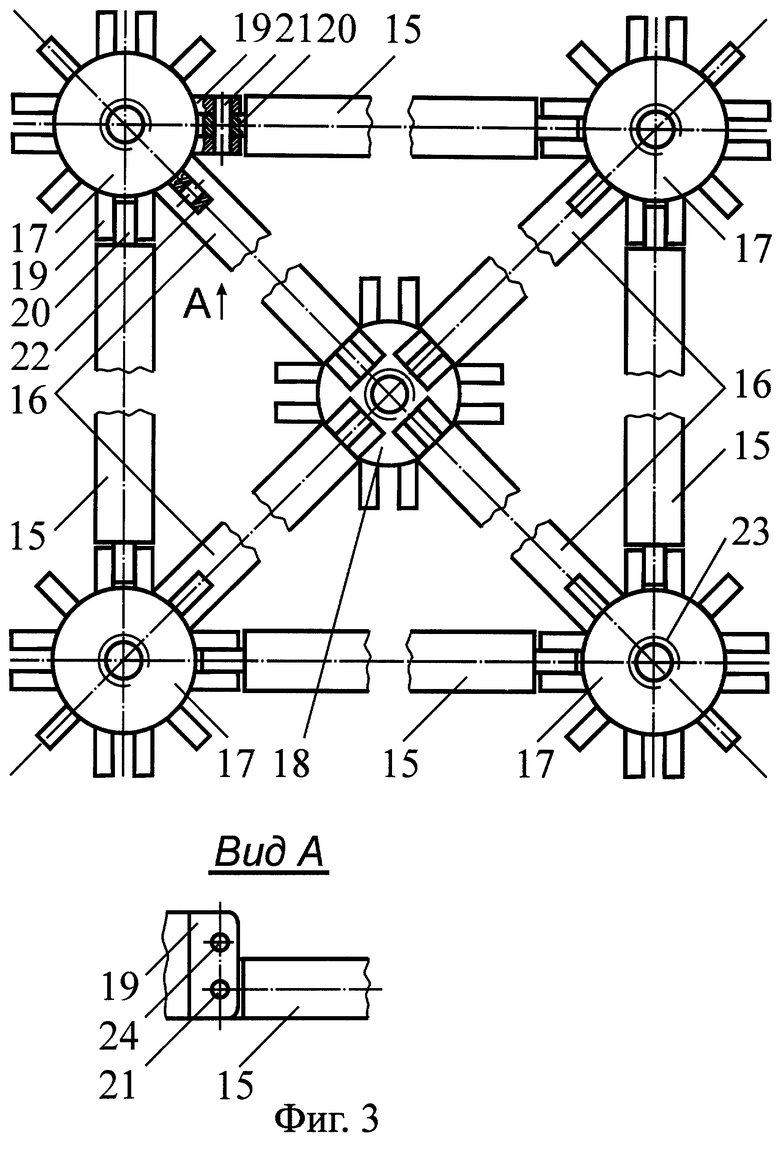
На фиг.3 представлен вид сверху пирамидального модуля с квадратным основанием. Стержни 15 с серьгами 20 на концах зафиксированы на осях 21 в боковых вилках 19 верхних шарниров 17. Аналогично стержни 16 зафиксированы в верхних вилках нижнего шарнира 18 и в нижних вилках верхних шарниров 17. Боковые вилки 19 имеют также отверстия 24 (вид А) для фиксации диагональных расчалок 5, натянутых на боковых сторонах каркасов 4, а для фиксации продольных расчалок 3 и диагональных расчалок 5, натянутых на основаниях каркасов 4, шарниры 17 имеют кронштейны 22 с отверстиями. Вертикальные стержни каркасов 4 и верхние шарниры 17 модуля скреплены резьбовыми соединениями 23.
Для снижения веса конструкции каркасов 4 и оболочек 2 они закреплены таким образом, что охватывают не менее четырех пирамидальных модулей фермы 1, образуя в поперечном сечении больший квадрат (фиг.2 и 4).
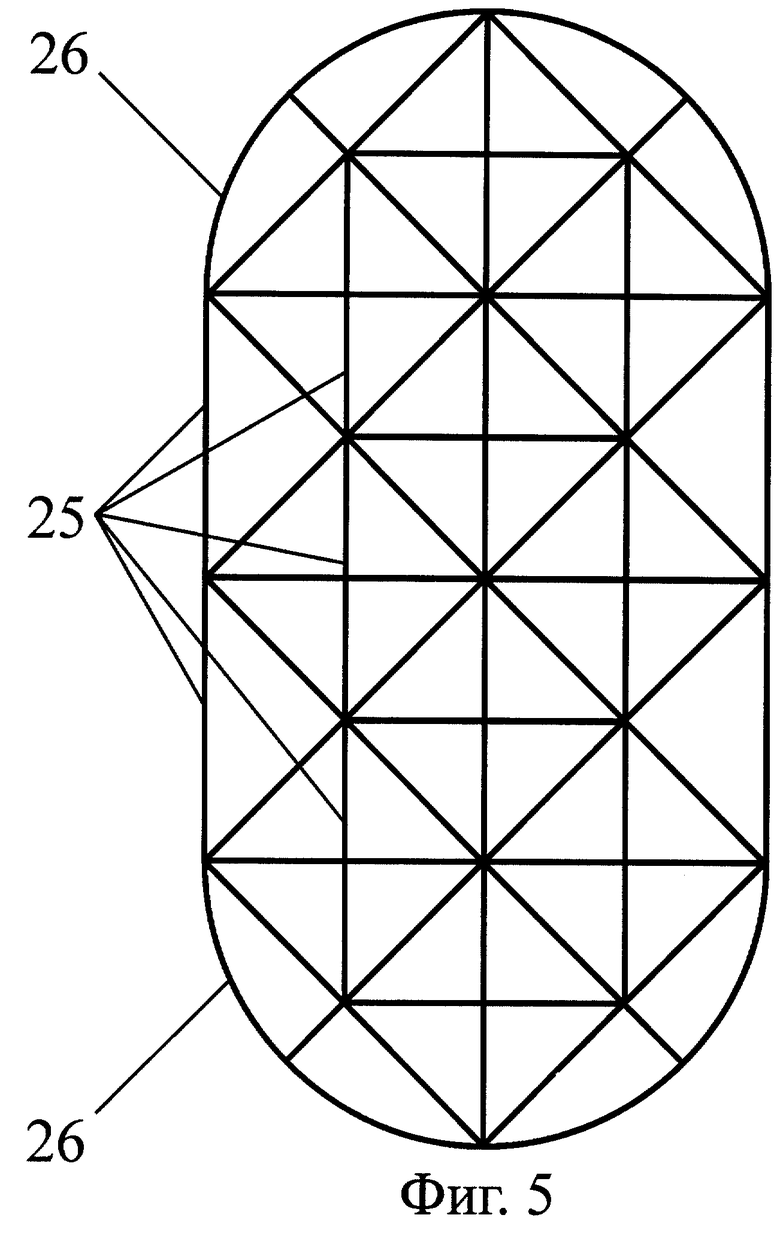
На фиг.5 представлен вид сверху фермы, собранной из пирамидальных модулей 25 и 26, имеющих в основании квадрат и четверть круга соответственно.
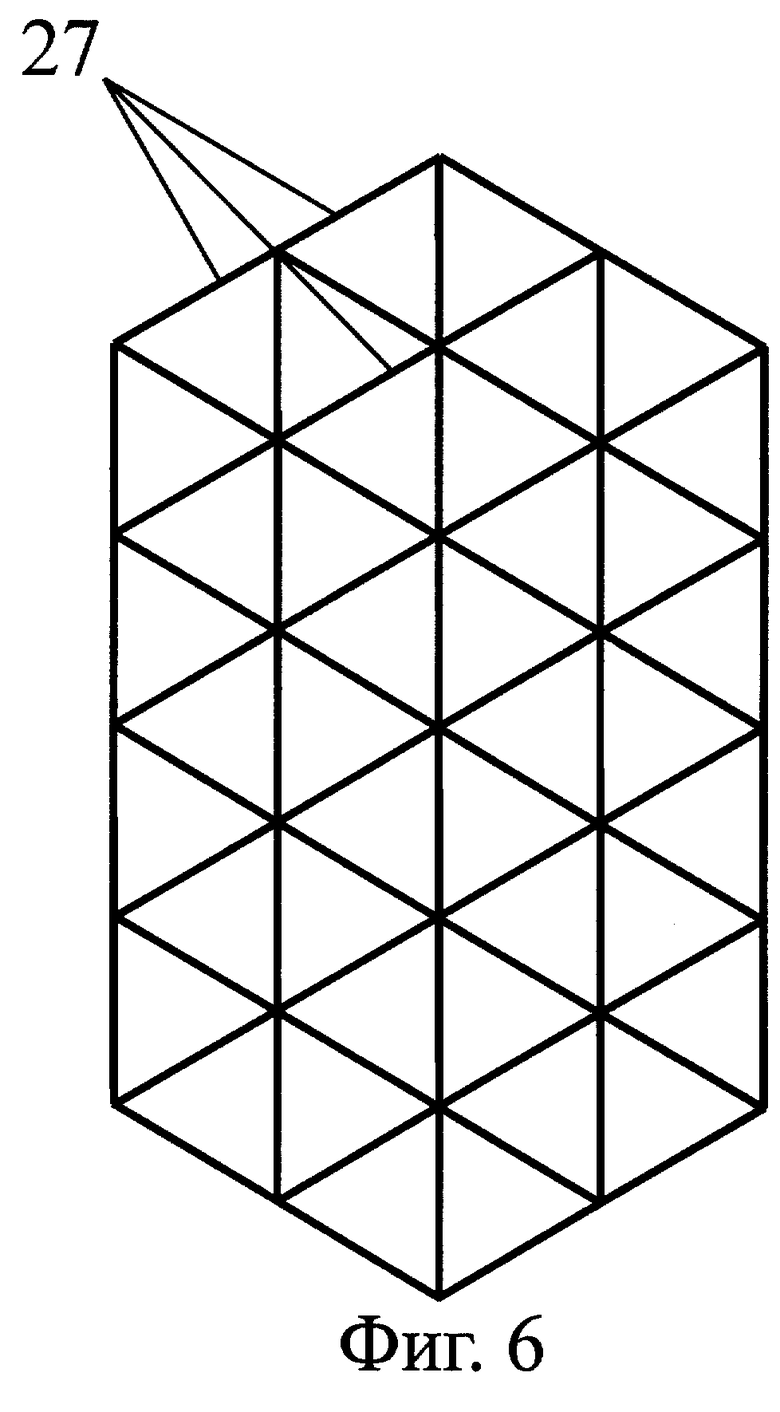
На фиг.6 представлен вид сверху фермы, собранной из пирамидальных модулей 27, имеющих в основании правильный шестиугольник. При дальнейшей сборке дирижабля каркасы 4 и оболочки 2 закрепляют таким образом, чтобы они охватывали не менее двух смежных пирамидальных модулей фермы, образуя в поперечном сечении равносторонние треугольники.
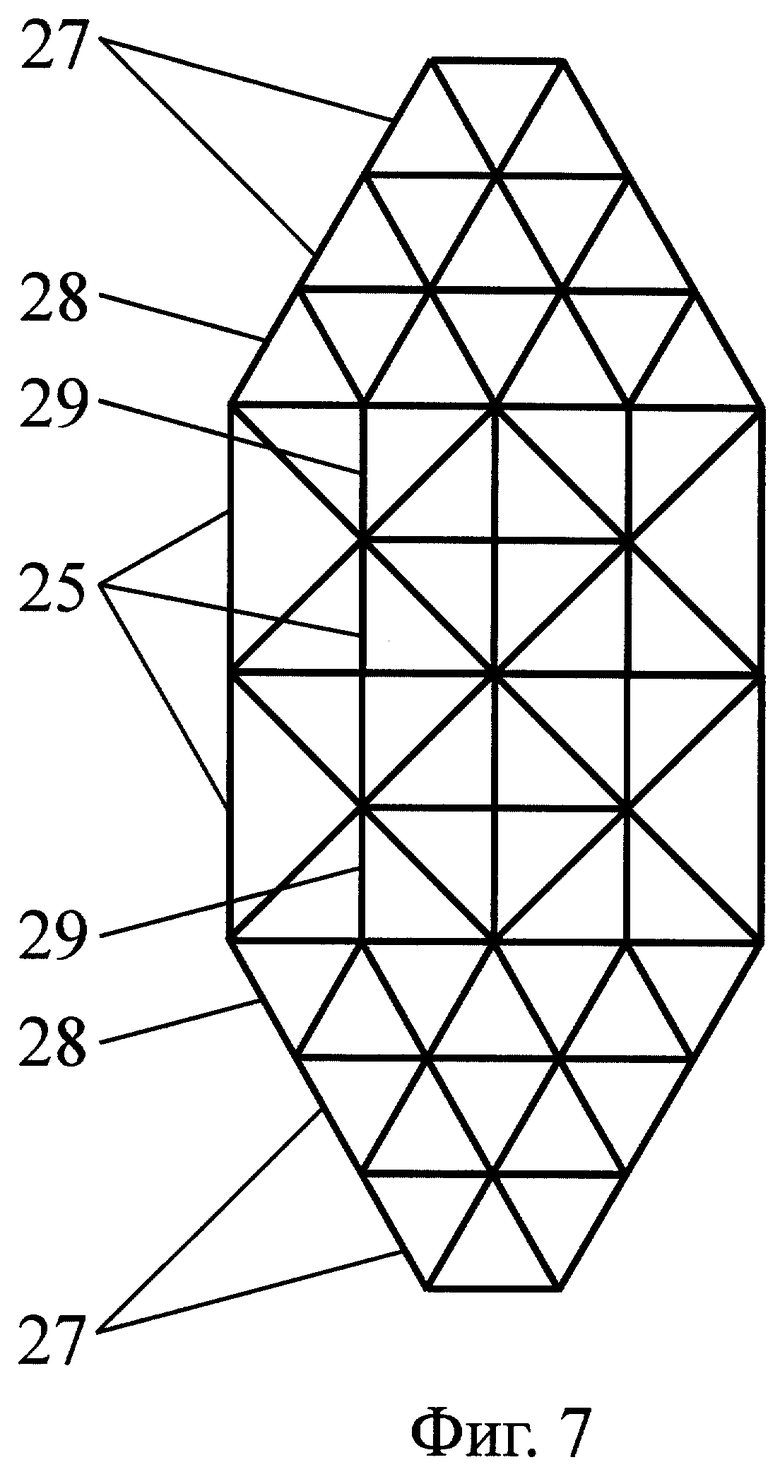
На фиг.7 представлен вид сверху фермы, собранной из пирамидальных модулей 25 и 27, имеющих в основании квадрат и правильный шестиугольник соответственно. Верхние шарниры модулей 25 и 27 соединены дополнительными стержнями 28, а нижние шарниры соединены стержнями 29.
Комбинирование пирамидальными модулями фермы 1, имеющими в основании квадрат, правильный шестиугольник и четверть круга, а также высотами вертикальных стержней каркасов 4 и оболочек 2 позволит строить дирижабли оптимальной аэродинамической формы и существенно снизить скапливание дождевой воды и снега на оболочках 2.
Благодаря трансформации оболочек 2 (при закачивании в них гелия из емкостей 6, 9 и при выкачивании из них гелия насосами 8) вдоль продольных расчалок 3 регулируют объем каждой оболочки 2, меняя тем самым общую подъемную силу дирижабля. При этом расходуемое топливо и гелий заменяют балласт.
Над каркасами и оболочками первого уровня могут быть надстроены каркасы и оболочки второго уровня, образующие продольный вертикальный стабилизатор. При этом оболочки первого и второго уровней соединены между собой гофрированными рукавами из материала оболочек, а оболочки второго уровня внахлест прикреплены к верхним стержням каркасов первого уровня с возможностью трансформации вдоль продольных расчалок каркасов второго уровня.
Габариты и вес дирижабля вместе с грузом 14 определяют количество и мощность турбореактивных двигателей 10, которые также унифицированы. Предложенная компоновка двигателей 10 позволяет легко управлять дирижаблем: разгон и поддержание заданной скорости осуществляют с помощью пары хвостовых двигателей 10, а торможение и остановку дирижабля осуществляют с помощью пары носовых двигателей 10. Разворот дирижабля осуществляют благодаря снижению тяги одного из хвостовых двигателей 10, а при необходимости - кратковременным включением носового двигателя 10, расположенного относительно продольной осевой линии дирижабля с той же стороны, что и хвостовой двигатель 10, тягу которого снижают. Выбор турбореактивных двигателей 10 обоснован тем, что они легче, компактнее и экономичнее двигателей с воздушными винтами. Использование в двигателях 10 системы отклонения вектора тяги значительно увеличит маневренность дирижабля.
Для транспортировки малогабаритных грузов могут быть использованы контейнеры, рассредоточенные таким образом, чтобы равномерно распределить нагрузку на ферму 1. Наиболее нагруженные шарниры и стержни изготовлены из алюминия и титана. Формы и размеры шарниров и стержней унифицированы.
Простота сборки и разборки дирижабля легко решает проблемы его хранения и транспортировки. Ему не требуется эллинг для обслуживания и хранения, занимающий большой участок земли. Сборку и разборку дирижабля производят на столе наземного взлетно-посадочного комплекса (НВПК). С помощью замков, удерживающих нижние шарниры фермы 1, дирижабль фиксируют на столе НВПК. В момент запуска замки освобождают шарниры.
Груз 14 доставляют на стол НВПК транспортной платформой, в ложементах которой уложен груз 14. До окончания предпусковых операций она разгружает ферму 1. Эти операции включают заправку топлива в баки 11, зарядку аккумуляторных батарей 12, заполнение гелием оболочек 2 и основных емкостей 6 и другие.
Перед стартом гидравлические подъемники платформы (или гидравлические опоры НВПК) освобождают груз 14 от ложементов. При размещении груза 14 внутри фермы 1, полностью или частично, некоторые стержни устанавливают после того, как транспортная платформа займет свое место на столе НВПК.
Во время посадки дирижабль причаливают буксировщиками, движущимися вдоль монорельсов, сходящихся в виде лучей к столу НВПК.
Создание сети НВПК в различных регионах страны и мира позволит доставлять тяжелые грузы больших размеров с меньшим риском и экономическими затратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИРИЖАБЛЬ (ВАРИАНТЫ) | 2014 |
|
RU2586787C2 |
| УПРАВЛЯЕМЫЙ АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ-КРАН | 1995 |
|
RU2098318C1 |
| ДИРИЖАБЛЬ И ДИСКООБРАЗНЫЙ КОРПУС ДИРИЖАБЛЯ | 2006 |
|
RU2317226C2 |
| РАДИОУПРАВЛЯЕМАЯ МОДЕЛЬ ДИРИЖАБЛЯ | 2003 |
|
RU2261749C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ (ВАРИАНТЫ) | 2015 |
|
RU2585380C1 |
| БЕЗБАЛЛАСТНЫЙ ДИРИЖАБЛЬ (ВАРИАНТЫ) | 1992 |
|
RU2046056C1 |
| КАРКАС ДИСКООБРАЗНОГО ДИРИЖАБЛЯ И ДИРИЖАБЛЬ, СОДЕРЖАЩИЙ ТАКОЙ КАРКАС | 2023 |
|
RU2820177C1 |
| ПОЖАРНЫЙ ДИРИЖАБЛЬ | 2003 |
|
RU2250122C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Дирижабль полужесткой конструкции | 2023 |
|
RU2812823C1 |
Изобретение относится к летательным аппаратам легче воздуха. Дирижабль содержит: пространственную ферму 1 из композитного материала, изолированные гофрированные оболочки 2, диагональные расчалки 5, основные емкости 6 со сжатым гелием, перепускные электроклапаны, устанавливаемые в газопроводах и газоструйных рулях 7, насосы 8 для ускоренного перекачивания гелия из оболочек 2 во вспомогательные емкости 9, турбореактивные двигатели 10, топливные баки 11, электрические аккумуляторы 12 и кабину 13 пилотов. Ферма 1 собрана из шарнирно-стержневых пирамидальных модулей. Оболочки 2 прикреплены внахлест к верхним стержням фермы 1 с возможностью расширения или сжатия вдоль продольных расчалок 3. Каркасы 4 собраны из шарнирно-стержневых модулей, закрепляемых резьбовыми соединениями в верхних шарнирах фермы 1. Рули 7 закреплены резьбовыми соединениями в верхних шарнирах фермы 1 и каркасов 4. Груз 14 прикреплен к нижним шарнирам фермы 1. Технический результат - снижение веса, технологических и эксплуатационных затрат, повышение маневренности. 1 з.п. ф-лы, 7 ил.
| RU 2001113005 А2, 10.06.2003 | |||
| ГОРЕЛКА ДЛЯ ГАЗОВОЙ ВАРОЧНОЙ ПАНЕЛИ | 2013 |
|
RU2635749C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1986 |
|
RU2083051C1 |

