Предлагаемое изобретение относится к медицинской технике и может быть использовано для измерения температуры живых теплокровных организмов и прежде всего - температуры человеческого тела.
Одной из актуальных проблем медицинского приборостроения является проблема быстрого измерения температуры живых организмов (в дальнейшем для определенности будем иметь в виду задачу измерения температуры человека). Сложность решения данной проблемы объясняется спецификой живого организма как объекта измерения температуры. Специфика проявляется следующим образом. Известно, что термисторы (полупроводниковые термосопротивления) в силу малых габаритов и массы обладают малой собственной постоянной времени - порядка нескольких миллисекунд. Казалось бы, при их использовании в качестве чувствительного элемента термометра они должны обеспечивать время измерения, соизмеримое с их постоянной времени, т.е., по крайней мере, не более одной секунды. Однако парадокс заключается в том, что реально время установления температуры термистора, равной (с приемлемой погрешностью) температуре поверхностного слоя кожного покрова, исчисляется минутами. Объясняется этот феномен особенностями механизма теплообмена организма с окружающей средой. Обычно начальная температура чувствительного элемента термометра равна температуре окружающей среды, которая, естественно, ниже температуры тела. Поэтому при касании термочувствительного элемента с поверхностью кожного покрова происходит холодовое раздражение соответствующего участка кожного покрова. В ответ на холодовое раздражение сосуды поверхностного сплетения, как правило, суживаются, а глубокого, наоборот, расширяются. Это ведет к снижению температуры наружных слоев кожи, а следовательно, к уменьшению теплоотдачи. Т.е. организм как бы теплоизолируется от холодного предмета.
Как решается данная проблема до настоящего времени? Во-первых, применением бесконтактных датчиков температуры. Наиболее или даже исключительно применяемьм для этих целей является датчик инфракрасного излучения. Цифровые инфракрасные термометры выпускаются рядом зарубежных фирм. Можно назвать, например, известную японскую фирму OMRON, выпускающую ушной инфракрасный цифровой термометр ТЕМ-004, время измерения у которого составляет 1 сек.
Термометр "ThermoTek" модели 820 израильской фирмы "SAAT" предусматривает измерение температуры лобной части головы человека. Поскольку она существенно отличается от температуры ядра тела, в приборе производится автоматическое введение поправки, так что измеренное значение соответствует оральной температуре. Недостатками инфракрасных термометров являются относительно высокая стоимость и низкая точность. Имеются и кондуктивные варианты цифровых термометров, обеспечивающих сравнительно высокое быстродействие. Примером может служить термометр "ThermoTek" модели 0482 той же израильской фирмы "SAAT". Термометр обладает достаточно высокими точностью (погрешность согласно стандарту ASTM Е1112-98 не более ±0,1°С) и быстродействием (время измерения порядка 10 сек). Внешний вид прибора показывает, что разработчиками были приняты все необходимые меры для уменьшения собственной постоянной времени термометра. С этой целью в качестве датчика применен термистор, который помещен на кончике длинного имеющего малое поперечное сечение держателя, что уменьшает отток тепла в окружающую среду через корпус термометра. Однако только эти меры конструктивного характера не могли обеспечить столь значительный эффект повышения быстродействия, поскольку они не составляют секрета и для других производителей цифровых термометров. Остается предположить, что в приборе реализован прием, который используется для контактных методов измерения высоких температур и позволяет измерять с помощью термопары температуру, которая значительно выше значения, при котором термопара разрушается. Суть приема состоит в использовании переходного процесса нагрева термочувствительного элемента:

где ΔT - прирост температуры термочувствительного элемента за промежуток времени, равный t; Тх-Тн - разность температур объекта измерения и термочувствительного элемента в момент начала теплового контакта; τ - постоянная времени термочувствительного элемента. Выражение (1) представляет собой уравнение, которое можно разрешить относительно значения Тх.
Следует заметить, что реализация рассматриваемого способа предъявляет повышенные требования к точности аналого-цифрового преобразования напряжения с выхода измерительной цепи датчика, поскольку малому значению прироста ΔT температуры термочувствительного элемента соответствует малое значение прироста выходной величины измерительной цепи. В связи с этим в термометре приходится использовать дорогостоящий микроконтроллер с АЦП высокого разрешения, что удорожает общую стоимость прибора (она составляет примерно 1000 рублей). Косвенным подтверждением выдвинутого предположения является то, что в инструкции к термометру "ThermoTek" предписано делать достаточно продолжительную временную выдержку перед повторным измерением (в приборе предусмотрена сигнализация момента готовности к измерению). Если в приборе действительно реализован описанный способ, то выдержка времени нужна, чтобы увеличить до приемлемого значения начальную разность температур Тх-Тн. В противном случае погрешность может достигать очень больших значений.
Примерно аналогичные характеристики имеет цифровой термометр ТЕМ-003 японской фирмы OMRON.
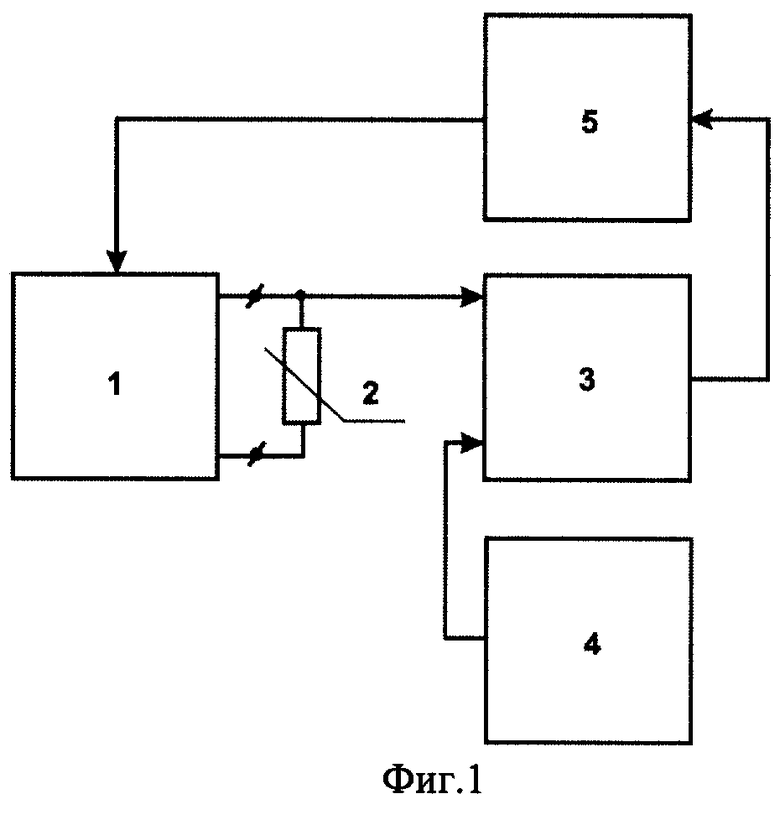
Из известных наиболее близким по технической сущности является способ, основанный на измерении мощности выходного сигнала управляемого источника питания измерительной цепи системы стабилизации температуры терморезистора, находящегося в тепловом контакте с объектом измерения [1]. Прежде чем приступать к его непосредственному изложению, необходимо дать пояснение принципа действия устройства, реализующего способ-прототип [1]. Функциональная схема устройства, реализующего способ-прототип, представлена на фиг.1.
Устройство включает измерительную цепь 1, например, в виде делителя напряжения, в одно из плеч которого включен терморезистор 2, устройство сравнения (разностное звено) 3, задатчик температуры стабилизации 4, управляемый источник 5 питания измерительной цепи. В простейшем случае измерительная цепь может состоять из одного терморезистора, при этом, очевидно, управляемый источник питания измерительной цепи должен быть источником тока.
Падение напряжения URt на терморезисторе является функцией F его сопротивления, а сопротивление является функцией температуры T, т.е.

Если с помощью замкнутого контура, включающего измерительную цепь 1, разностное звено 3 и управляемый источник питания 5, поддерживать напряжение (2) равным напряжению Uc с выхода задатчика температуры стабилизации 4, то температура терморезистора будет постоянной и ее значение можно определить из уравнения

Предположим, что терморезистор находится в тепловом контакте с объектом измерения, имеющим температуру Тх<Тс. Тогда от терморезистора к объекту измерения идет тепловой поток, равный λ(Тс-Тx), где λ - коэффициент теплопроводности граничной среды между терморезистором и объектом измерения. Поскольку система стремится поддержать температуру терморезистора неизменной и равной Тc, то управляемый источник питания должен восполнять потерю энергии терморезистором, т.е. затрачивать на восполнение потерь тепла мощность, равную:

Таким образом, измеряя мощность сигнала на выходе управляемого источника питания измерительной цепи, можно получить информацию об измеряемой температуре. Однако в формулу (4) входит коэффициент λ, который, например, при измерении температуры тела человека изменяется от индивидуума к индивидууму. Т.е. практически использовать рассматриваемый способ для измерения температуры биологических объектов не представляется возможным. В то же время способ привлекателен тем, что обеспечивает малое время измерения, которое определяется способностью замкнутой системы поддерживать стабильной температуру терморезистора при изменении температуры объекта измерения. При малых массе и габаритах терморезистора время переходного процесса от момента теплового контакта терморезистора с объектом измерения до установления температуры терморезистора равной заданной температуре Тc стабилизации составляет единицы миллисекунд. Кроме того, благодаря работе терморезистора в одной точке его характеристики, полностью снимается проблема обеспечения линейности функции преобразования температуры в мощность выходного сигнала управляемого источника питания.
Недостаток способа-прототипа, обусловленный наличием в функции преобразования (4) неизвестного коэффициента λ, устранен в предлагаемом способе, также основанном на использовании замкнутой системы стабилизации температуры терморезистора.
Изобретение позволяет повысить точность измерения температуры и обеспечить инвариантность результата измерения по отношению к коэффициенту λ.
Это достигается тем, что значение температуры стабилизации системы стабилизации температуры терморезистора, находящегося в тепловом контакте с объектом измерения, изменяют от начального значения, несколько превышающего измеряемую температуру, до значения, при котором мощность выходного сигнала управляемого источника питания измерительной цепи уменьшается до нуля, и вычисляют искомое значение температуры объекта измерения по формуле
где  - функция, обратная по отношению к функции Rt=F(Tx) преобразования терморезистора, Rt - значение сопротивления терморезистора в момент компенсации.
- функция, обратная по отношению к функции Rt=F(Tx) преобразования терморезистора, Rt - значение сопротивления терморезистора в момент компенсации.
Поскольку при равенстве температур терморезистора и объекта измерения, тепловой поток между ними отсутствует, то коэффициент λ теплопроводности граничной среды между терморезистором и объектом измерения на результат измерения не оказывает никакого влияния. Вместе с тем, предлагаемый способ наследует от способа-прототипа его достоинства, в частности повышенное быстродействие, и, кроме того, приобретает все положительные качества, свойственные компенсационному методу измерения. Функция преобразования (5) получена следующим образом. Согласно выражению (4) в момент компенсации мощность выходного сигнала управляемого источника сигнала Р падает до нуля, что и является признаком достижения равенства измеряемой температуры и температуры терморезистора (температуры стабилизации). По известным значениям тока IRt через терморезистор и падению напряжения URt на нем можно определить его сопротивление:
По известной функции преобразования терморезистора можно определить функцию, обратную по отношению к ней:

Сигнал с выхода управляемого источника питания 5 может быть любым, например, в виде постоянного тока, постоянного напряжения, переменного тока, переменного напряжения, в виде импульсов, модулированных по ширине (ШИМ) [1] или по частоте (ЧИМ) [2], и, наконец, можно также использовать для управления источником питания импульсно-разностную модуляцию (ИРМ). Предпочтительными являются сигналы ШИМ, ЧИМ и ИРМ, так как в этом случае легко устанавливается момент равенства нулю мощности управляемого источника питания измерительной цепи. Главное же преимущество использования таких сигналов состоит в простоте реализации задатчика температуры стабилизации. Например, это может быть источник линейно уменьшающегося напряжения.
Функциональная схема, реализующая предлагаемый новый способ измерения температуры биологических объектов, представлена на фиг.2. Схема включает измерительную цепь 1, частью которой является терморезистор 2, устройство сравнения 3, задатчик 4 температуры стабилизации, управляемый источник питания 5, микроконтроллер 6 и отсчетное устройство 7. Причем терморезистор 2 подключен к измерительной цепи 1, а его потенциальная клемма соединена со входом устройства сравнения 3, на второй вход которого подключен задатчик 4 температуры стабилизации, выход которого соединен с вторым входом устройства сравнения 3 и с вторым входом микроконтроллера 6, выход устройства сравнения через управляемый источник 5 питания соединен с измерительной цепью и со входом микроконтроллера 6, выходы которого подключены к задатчику 4 температуры стабилизации и отсчетному устройству 7. Процесс измерения состоит в следующем. Обеспечивается тепловой контакт терморезистора с объектом измерения. Микроконтроллер производит непрерывную оценку информативного параметра выходного сигнала управляемого источника 5. Полагаем, что измерение реализуется программно. Для определенности будем считать, что информативньм параметром выходного сигнала источника 5 является частота, поэтому микроконтроллер осуществляет счет импульсов за образцовый интервал времени (если быть точным, микроконтроллер просто определяет, появился ли в течение образцового интервала хотя бы один счетный импульс). Одновременно микроконтроллер 6 изменяет в сторону уменьшения выходное напряжение задатчика 4 температуры стабилизации от значения, соответствующего температуре, несколько превышающей максимальное значение измеряемой температуры. Состояние компенсации, т.е наступления равенства Тс=Тх, определяется по нулевому количеству импульсов выходного сигнала управляемого источника, попадающих в заданный образцовый интервал времени. В момент компенсации микроконтроллер оценивает значение выходного напряжения задатчика 4 (оно равно падению напряжения на терморезисторе). Результат измерения получается в микроконтроллере в два этапа: сначала вычисляется сопротивление терморезистора по формуле (6), а затем значение измеряемой температуры - по формуле (7). Вычисленное значение температуры индицируется отсчетным устройством 7.
Рассмотрим далее несколько вариантов реализации способа.
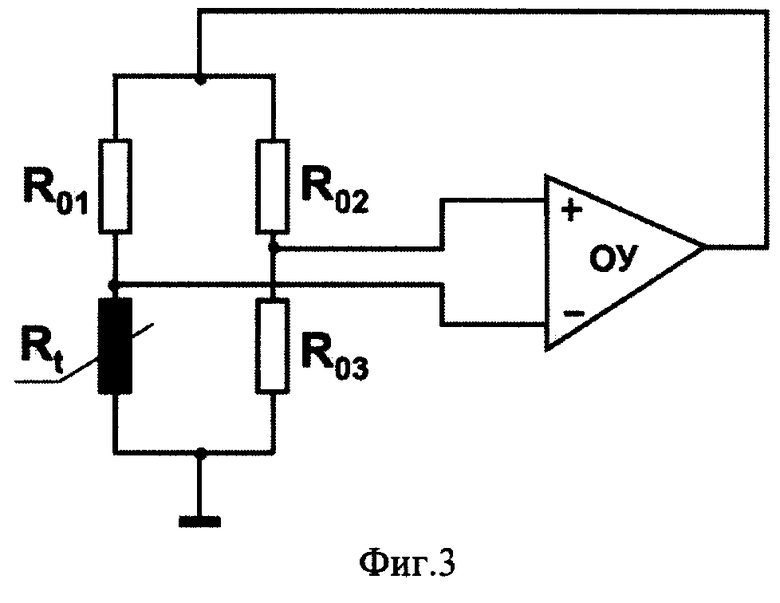
Простейшая схема приведена на фиг.3.
Здесь измерительная цепь представляет собой делитель напряжения, включающий резистор Ro1 и терморезистор Rt. Задатчик температуры стабилизации также представляет собой делитель напряжения, включающий резисторы Ro2 и Rо3. Операционный усилитель ОУ совмещает в себе функции устройства сравнения и управляемого источника питания. В установившемся состоянии напряжение разбаланса моста, образованного двумя делителями напряжения равно, ошибке статизма замкнутой системы регулирования, которая весьма мала с учетом того, что коэффициент усиления операционного усилителя достаточно большой (обычно не менее 105). Система автоматически подбирает такое напряжение на выходе усилителя, чтобы мост был в равновесии. Это означает, что выполняется соотношение

откуда следует
Таким образом, система на фиг.1 и 2 поддерживает заданным (с помощью отношения резисторов Ro2 и Rо3) значение сопротивления Rt терморезистора, а следовательно, и его температуры.
Чтобы показать, как можно использовать рассматриваемую систему для измерения температуры, рассмотрим процессы в системе более подробно.
В общем случае, если перед включением питания схемы фиг.3 температура терморезистора была равной Т0, то по прошествии времени t после включения питания ее значение определяется выражением:

где m - масса терморезистора; С - удельная теплоемкость терморезистора; i - ток, протекающий через левый делитель моста; λ - коэффициент теплопроводности граничной среды между терморезистором и объектом измерения; λ(Т-Тx) - тепловой поток от терморезистора к объекту измерения (полагаем, что температура Т терморезистора больше температуры Tx объекта измерения).
В установившемся режиме температура Тc терморезистора является константой, что означает выполнение равенства:

являющегося уравнением теплового баланса.
Выражая ток ic через установившееся значение uc выходного напряжения ОУ, с учетом (8) уравнение (10) можно переписать в виде:

откуда, обозначив коэффициент  при через k, получим:
при через k, получим:
Таким образом, с точностью до постоянного коэффициента λ/k мощность выходного сигнала управляемого источника питания измерительной цепи прямо пропорциональна разности температуры стабилизации и измеряемой температуры. Нетрудно видеть, что рассматриваемая схема фиг.3 является частью схемы фиг.2. Задатчик температуры стабилизации реализован в виде делителя напряжения на резисторах Ro2 и Rо3, а операционный усилитель ОУ совмещает функции устройства сравнения и управляемого источника питания измерительной цепи. Если резистор Rо3 сделать дискретно управляемым микроконтроллером, то можно, изменяя его сопротивление, задавать необходимый закон изменения во времени температуры стабилизации. В момент, когда выходное напряжение управляемого источника питания оказывается меньшим некоторого порогового значения, микроконтроллер фиксирует значение сопротивления Rо3, вычисляет значение сопротивления терморезистора по формуле (8) и значение измеряемой температуре по формуле (7).
Вариант системы стабилизации температуры терморезистора с использованием ШИМ описан в работе [1]. Возможность использования ЧИМ покажем на примере функциональной схемы, представленной на фиг.4. Схема также является частью схемы фиг.2. Роль задатчика температуры стабилизации также играет делитель на резисторах Ro2 и Ro3, операционный усилитель ОУ выполняет функцию устройства сравнения, совокупность формирователя импульсов ФИ, источника образцового напряжения ИОН и ключа Кл представляет собой управляемый источник питания измерительной цепи. Работу схемы поясним с помощью временной диаграммы, показанной на фиг.5. К моменту окончания N-го цикла за счет охлаждения терморезистора напряжение на измерительной диагонали моста переходит через нуль, в результате чего срабатывает устройство сравнения (ОУ). Напряжение на его выходе становится равным некоторому отрицательному напряжению -Ucp, достаточному для срабатывания формирователя импульсов ФИ стабильной длительности to. Ключ Кл замыкается, и на вход ОУ подается большое положительное напряжение Uo. Вследствие этого напряжение на выходе ОУ скачком увеличивается до напряжения насыщения Uн. В течение интервала to терморезистор разогревается напряжением Uo. Поэтому к моменту окончания импульса разогрева мост снова разбалансирован, напряжение разбаланса к концу интервала to становится равным ΔU. Далее происходит процесс остывания терморезистора, мост приближается к состоянию равновесия. В момент t1 ОУ выходит из насыщения, а затем при пересечении напряжением разбаланса нулевого уровня устройство сравнения (ОУ) опять срабатывает и далее повторяются описанные выше процессы.
Для вывода функции преобразования запишем уравнение теплового баланса терморезистора:

Это выражение справедливо в предположении, что изменением температуры терморезистора за время цикла преобразования можно пренебречь, поскольку эти изменения весьма малы по сравнению с его средней температурой (они соизмеримы с ошибкой статизма рассматриваемой замкнутой системы, которая пренебрежимо мала, учитывая огромный коэффициент усиления усилителя ОУ). В выражении (13) величины Ptо и Pτ2 представляют собой мощности, рассеиваемые на терморезисторе в течение интервалов to и τ2 соответственно, TRt - температуру стабилизации и Тх - измеряемую температуру. Запишем выражения для Рto и Pτ2:
(При выводе выражений (3) и (4) учтено, что с точностью до относительного значения ошибки статизма из условия равновесия моста следует Rt=Ro1Ro3/Ro2). Для упрощения выражений введем обозначение k=Ro2/Rо3. С учетом этого обозначения, выражений (3), (4) и того, что τ2=Тц-to, разрешим уравнение (13) относительно величины f=1/Тц.
Таким образом, частота f является линейной функцией разности температуры стабилизации и измеряемой температуры. Обращает на себя внимание тот факт, что при Тх=TRt частота f имеет отрицательное (!) значение, определяемое вторым слагаемым формулы (16). Почему отрицательное? Отрицательное значение частоты вполне согласуется с физическими процессами, происходящими в схеме. Действительно, предположим, измеряемое значение температуры равно температуре стабилизации, т.е. Тх=ТRt. В этом случае терморезистор нагревается током, непрерывно протекающим через него, поскольку источник опорного напряжения все время подключен к питающей диагонали моста. Но при Tx=TRt оттока тепла от терморезистора нет, следовательно, равновесное состояние моста в этом случае может поддерживаться только “импульсами охлаждения”, что и отображается в формуле (16) отрицательной составляющей. На практике наличие отрицательной составляющей означает, что при равенстве нулю частоты f температура терморезистора отличается от измеряемой температуры на величину, которую можно найти из выражения (16), приравняв f нулю (граничное значение между положительным и отрицательным значением) и разрешив получающееся уравнение относительно TRt-Тх:

Фактически формула (17) дает значение методической погрешности всех терморезистивных методов измерения температуры, обусловленной тем, что воспринять значение сопротивления терморезистора иначе как, пропустив через него ток, невозможно (если не считать способа, основанного на измерении мощности собственного шума терморезистора). Допустимое значение этой погрешности обеспечивается надлежащим выбором параметров, входящих в формулу (17) и определяющих мощность, рассеиваемую на терморезисторе в виде тепла.
Одно из преимуществ способа состоит в том, что благодаря малому отличию начального значения температуры стабилизации от измеряемой температуры (в случае измерения температуры тела человека, это значение может быть выбрано равным, например, 41°С) в момент контакта терморезистора с объектом измерения происходит меньшее искажение температурного поля объекта измерения. Более того, известно, что при тепловом раздражении кожи сосуды ее поверхностного сплетения расширяются, в результате притока крови, имеющей температуру ядра тела, организм стремится сохранить температуру поверхностного слоя кожного покрова неизменной. Т.е. происходящий процесс противоположен процессу при холодовом раздражении и способствует минимизации искажения температурного поля объекта измерения. Не случайно, земские врачи рекомендовали перед измерением температуры ребенка предварительно нагревать термометр до температуры, близкой к измеряемой, но не превосходящей ее (не превосходящей, так как ртутный термометр из-за наличия штифта в капилляре не способен уменьшить высоту столбика ртути без встряхивания).
Для оценки быстродействия устройства зададимся практически реальными значениями параметров схемы. Предположим, что значение частоты выходного сигнала управляемого источника питания равно 10 кГц, что далеко от верхнего предела, определяемого быстродействием устройства сравнения (граничной частоты операционного усилителя) и скоростью перехода ключа Кл в схеме фиг.4 из открытого состояния в закрытое и обратно. Пусть образцовый интервал времени, в течение которого микроконтроллер оценивает значение частоты на выходе управляемого источника, составляет 0,05 сек. Такое значение интервала обеспечивает определение момента равенства нулю выходной частоты управляемого источника с погрешностью 0,2%. Предлагаемый способ измерения температуры по сути представляет собой способ развертывающего уравновешивающего преобразования. Поскольку на оценку значения частоты затрачивается 0,05 сек, то при требуемой погрешности измерения в 1% необходимо, чтобы длительность развертывающей функции была не менее 100 интервалов оценки значения частоты, что составляет 5 сек. Необходимо учитывать, что на практике можно обеспечить существенно более высокое значение выходной частоты управляемого источника. Т.е. ограничения методического характера не делают указанную оценку быстродействия предельной. Однако существует и другое ограничение: скорость уменьшения температуры стабилизации не должна превышать скорость естественного охлаждения терморезистора за счет теплового контакта с более холодным объектом измерения. При каждом данном значении температуры стабилизации скорость охлаждения равна производной от экспоненты в начальной ее точке, выражающей закон изменения температуры охлаждаемого терморезистора. При этом надо учитывать, что по мере снижения температуры стабилизации скорость охлаждения терморезистора понижается пропорционально разности температур ТRt-Тх. Практически обеспечить указанное соотношение скоростей просто. Дело в том, что после очередного шага уменьшения температуры стабилизации устройство сравнения не сработает до тех пор, пока температура терморезистора не установится (за счет естественного охлаждения) равной заданному значению. Поэтому следующий шаг снижения температуры стабилизации можно производить после первого срабатывания устройства сравнения. Как только в течение определенного интервала времени устройство сравнения перестает срабатывать, так можно производить отсчет результата измерения. С учетом связей блоков в схеме фиг.2 сказанное означает, что каждый следующий шаг уменьшения температуры стабилизации можно производить после фиксации первого импульса с выхода управляемого источника. Процесс измерения можно считать законченным, как только в течение нескольких последовательных интервалов оценки выходной величины управляемого источника не будет зафиксировано ни одного импульса. Число таких интервалов следует подобрать экспериментально.
Предлагаемый способ измерения температуры открывает перспективу создания цифрового термометра, превосходящего по простоте, точности и быстродействию известные аналоги, выпускаемые зарубежными фирмами.
Литература:
1. Шахов Э.К., Щеголев В.Е. Система стабилизации температуры для термоанемометров. - Измерительные преобразователи и информационые технологии. Межвузовский научный сборник, выпуск 1, Уфа, 1996, с.174-178.
2. Писарев А.П. Модель преобразователя температуры в ЧИМ-сигнал. Информационно-измерительная техника. Межвузовский сборник научных трудов. Изд-во Пензенского гос. ун-та. Выпуск 28. 2003, с.127-137.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОДЕЙСТВУЮЩИЙ МЕДИЦИНСКИЙ ТЕРМОМЕТР | 2004 |
|
RU2255314C1 |
| СПОСОБ ТЕРМОРЕЗИСТИВНОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2004 |
|
RU2269750C2 |
| СПОСОБ ЭКСПРЕСС-ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2007 |
|
RU2333466C1 |
| СПОСОБ ИТЕРАЦИОННОГО ТЕРМОРЕЗИСТИВНОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2006 |
|
RU2324155C1 |
| КОМПЕНСАЦИОННЫЙ СПОСОБ УСКОРЕННОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2006 |
|
RU2319122C1 |
| СПОСОБ ИТЕРАЦИОННОГО ТЕРМОРЕЗИСТИВНОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2006 |
|
RU2326354C1 |
| Способ компенсации температурной погрешности терморезисторов, устройства для реализации способа | 2019 |
|
RU2732838C1 |
| Способ снижения погрешности измерения температуры электрическим мостом и измерительный мост Уитстона-Капиноса | 2019 |
|
RU2738198C1 |
| СПОСОБ УСТРАНЕНИЯ ВАРИАЦИЙ ТЕМПЕРАТУРЫ ВНЕШНЕЙ СРЕДЫ В ТЕПЛОЭЛЕКТРИЧЕСКОМ ВАКУУММЕТРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2389991C2 |
| Способ измерения температуры среды | 2022 |
|
RU2781754C1 |



Изобретение относится к медицинской технике и может быть использовано для измерения температуры тела человека. Способ включает измерение мощности выходного сигнала управляемого источника питания измерительной цепи системы стабилизации температуры терморезистора. При этом значение температуры стабилизации терморезистора изменяют от начального значения, превышающего верхний предел диапазона измерения температуры, до значения, при котором мощность управляемого источника питания измерительной цепи уменьшается до нуля. Значение температуры объекта находят как функцию, обратную по отношению к функции преобразования терморезистора. Изобретение направлено на повышение точности и быстродействия измерения температуры. 5 ил.
Компенсационный способ измерения температуры, состоящий в измерении мощности выходного сигнала управляемого источника питания измерительной цепи системы стабилизации температуры терморезистора, находящегося в тепловом контакте с объектом измерения, отличающийся тем, что значение температуры стабилизации системы стабилизации температуры терморезистора, находящегося в тепловом контакте с объектом измерения, изменяют от начального значения, несколько превышающего верхний предел диапазона измерения температуры, до значения, при котором мощность управляемого источника питания измерительной цепи уменьшается до нуля, и вычисляют искомое значение температуры объекта измерения по формуле
где  - функция, обратная по отношению к функции Rt=F(Tx) преобразования терморезистора;
- функция, обратная по отношению к функции Rt=F(Tx) преобразования терморезистора;
Rt - значение сопротивления терморезистора в момент компенсации.
| Электронный термометр | 1989 |
|
SU1721450A1 |
| Способ определения температуры | 1986 |
|
SU1364911A1 |
| Способ измерения температуры | 1977 |
|
SU678337A1 |
| Электронный термометр | 1990 |
|
SU1795307A1 |
| ПЕРВЫЙ СЕТЕВОЙ УЗЕЛ, ВТОРОЙ СЕТЕВОЙ УЗЕЛ, УСТРОЙСТВО БЕСПРОВОДНОЙ СВЯЗИ И ВЫПОЛНЯЕМЫЕ В НИХ СПОСОБЫ ДЛЯ УПРАВЛЕНИЯ ПРОЦЕДУРОЙ ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2724930C1 |

