ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к системе кодирования движущегося изображения и, в частности, к способу предсказания блока с использованием усовершенствованного режима прямого предсказания для В-кадров.
2. Описание уровня техники
Одно из преимуществ использования В-кадров в системе кодирования движущегося изображения заключается в том, что режим прямого предсказания, не привносящий дополнительной служебной информации, выбирается чаще других режимов предсказания (таких как предсказание вперед, обратное предсказание, двунаправленное предсказание, внутрикадровое предсказание и т.д.). Поэтому, используя В-кадры, а не только Р-кадры, можно повысить эффективность системы кодирования движущегося изображения.
Применительно к В-кадрам способ предсказания блока с использованием режима прямого предсказания сводится к пересчету вектора движения вперед и вектора движения назад в масштабированные версии вектора движения смещенного блока в последующем опорном кадре для режима прямого предсказания, к получению двух отдельных блоков с компенсацией движения с использованием вышеупомянутых векторов движения и к получению на завершающем этапе предсказанного блока путем осреднения двух блоков с компенсацией движения.
Более подробно вышеуказанный способ предсказания блока с использованием режима прямого предсказания можно рассмотреть со ссылкой на фиг.1.
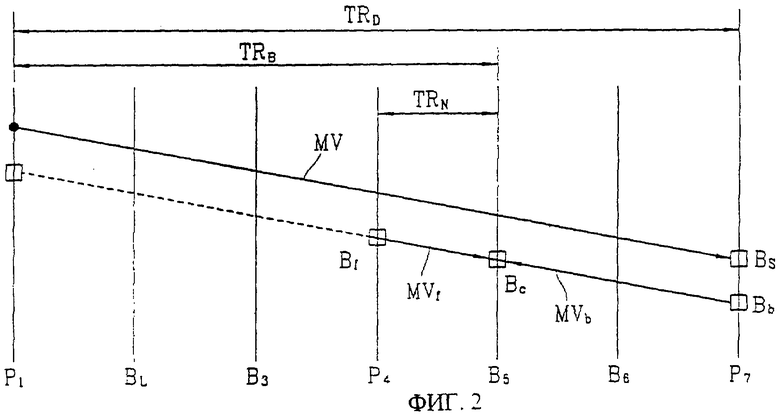
На фиг.1 представлена схема изображения для описания способа предсказания блоков с использованием режима прямого предсказания в соответствии с известной технологией. Как видно из иллюстрации, схема изображения содержит I-кадр (не показан), закодированный с предсказанием только по декодированным образцам внутри самого кадра, Р-кадры Р1, Р4 и Р7, закодированные с межкадровым предсказанием на максимум один вектор движения по ранее декодированным опорным кадрам, и В-кадры В2, В3, В5 и В6, закодированные с помощью двух блоков с межкадровым предсказанием по ранее декодированным опорным кадрам.
Кроме того, для удобства будут в первую очередь описаны параметры, представленные на фиг.1. TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания (Р1) и последующим опорным кадром для режима прямого предсказания (Р7); TRB - временной интервал между предыдущим опорным кадром для режима прямого предсказания (Р1) и текущим В-кадром (В5); MV - вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания (Р7); MVf - вектор движения вперед в режиме прямого предсказания, указывающий на предыдущий опорный кадр для режима прямого предсказания, и MVb - вектор движения назад в режиме прямого предсказания, указывающий на последующий опорный кадр в режиме прямого предсказания. В данном случае предыдущий опорный кадр для режима прямого предсказания является опорным кадром, указанным вектором движения смещенного блока в последующем опорном кадре для режима прямого предсказания.
Используя вышеприведенные параметры, способ предсказания блока в режиме прямого предсказания можно описать следующим образом.
Прежде всего, вектор движения вперед в режиме прямого предсказания (MVf) получают по вектору движения (MV) смещенного блока Bs в последующем опорном кадре для режима прямого предсказания (Р7) по формуле (1)

Кроме того, вектор движения назад в режиме прямого предсказания (MVb) получают по вектору движения (MV) смещенного блока Bs в последующем опорном кадре для режима прямого предсказания (Р7) с помощью формулы (2)

Таким образом, движение блоков Bf и Вb компенсируется с помощью векторов движения MVf и MVb, рассчитанных с помощью формул (1) и (2), после чего два этих блока осредняются для получения значения предсказания В' с текущего блока Вс в В-кадре по формуле (3)

Однако в соответствии с известным способом предсказания блока в режиме прямого предсказания, вектор движения вперед для режима прямого предсказания получают по вектору движения смещенного блока в последующем опорном кадре для режима прямого предсказания, вследствие чего полученное значение будет лишь приблизительным, а не точным вектором движения текущего блока В-кадра.
Кроме того, в соответствии с известным способом предсказания блока в режиме прямого предсказания, даже если опорный кадр близок по времени к В-кадру и имеет большое сходство с В-кадром, предсказание блоков осуществляется с помощью среднего значения двух отдельных блоков с компенсацией движения без учета временного интервала между опорными кадрами. Поэтому точность предсказанного блока снижается.
В частности, в последовательности, включающей меркнущий объект, из-за того, что яркость сплошных В-кадров может постепенно ослабляться или постепенно усиливаться, значение предсказания, получаемое с помощью простого осреднения двух блоков с компенсацией движения, сильно отличается от исходного, вследствие чего эффективность кодирования всей системы значительно снижается.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Таким образом, целью настоящего изобретения является создание способа предсказания блока в режиме прямого предсказания, имеющего более высокую эффективность кодирования, путем получения вектора движения вперед в режиме прямого предсказания по вектору движения смещенного блока в последующем опорном кадре в режиме прямого предсказания и получения предсказанного блока в В-кадре, подлежащем в данный момент кодированию, с применением интерполяционного предсказания по двум отдельным блокам с компенсацией движения.
Другой целью настоящего изобретения является создание способа предсказания блока в режиме прямого предсказания, способного повысить точность предсказанного блока и эффективность кодирования путем получения вектора движения вперед в режиме прямого предсказания по опорному кадру, который является ближайшим к текущему В-кадру, и путем получения предсказанного блока в В-кадре, который в данный момент кодируют с применением интерполяционного предсказания по двум отдельным блокам с компенсацией движения.
Для достижения целей настоящего изобретения, как показано в нижеприведенных примерах его осуществления и подробном описании, разработан способ предсказания блока для усовершенствованного режима прямого предсказания, содержащий следующие операции: первая операция - получение вектора движения вперед в режиме прямого предсказания для В-кадра, подлежащего кодированию (или декодированию); вторая операция - получение вектора движения назад в режиме прямого предсказания для В-кадра, подлежащего кодированию (или декодированию); третья операция - получение двух отдельных блоков с компенсацией движения путем использования векторов движения вперед и назад в режиме прямого предсказания, полученных на первой и второй операциях; и четвертая операция - предсказание блока В-кадра, подлежащего кодированию (или декодированию) в данный момент, с применением интерполяционного предсказания по двум отдельным блокам с компенсацией движения, полученным на третьей операции.
Эти и другие цели, признаки, аспекты и преимущества данного изобретения будут более очевидны из нижеследующего подробного описания настоящего изобретения, которое дается со ссылками на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые помогают лучше уяснить суть изобретения и являются составной частью данного описания, иллюстрируют примеры осуществления изобретения и служат совместно с описанием для объяснения принципов, лежащих в его основе.
На чертежах представлено следующее:
на фиг.1 представлена диаграмма, иллюстрирующая известный способ предсказания блока в режиме прямого предсказания;
на фиг.2 представлена диаграмма, иллюстрирующая способ предсказания блока в режиме прямого предсказания в соответствии с настоящим изобретением;
фиг. 3 представлена диаграмма, иллюстрирующая способ интерполяционного предсказания в соответствии с одним примером осуществления настоящего изобретения, и
на фиг.4 представлена диаграмма, иллюстрирующая способ интерполяционного предсказания в соответствии с другим примером осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
В описании содержатся подробные ссылки на предпочтительные примеры осуществления настоящего изобретения и соответствующие им иллюстрации в прилагаемых чертежах.
В способе предсказания блока в режиме прямого предсказания по настоящему изобретению по вектору движения смещенного блока в предыдущем опорном кадре для режима прямого предсказания определяют векторы движения вперед и назад в режиме прямого предсказания, с помощью вышеупомянутых векторов движения получают два блока с компенсацией движения и, наконец, путем интерполяции двух блоков с компенсацией движения получают предсказываемый блок.
Кроме того, в способе предсказания блока с использованием режима прямого предсказания по настоящему изобретению вектор движения назад определяют по последующему опорному кадру в режиме прямого предсказания, вектор движения вперед в режиме прямого предсказания определяют по опорному кадру, ближайшему к текущему В-кадру среди последующих опорных кадров, а блоки с компенсацией движения получают по вышеупомянутым векторам движения и, наконец, предсказываемый блок получают путем интерполяции двух блоков с компенсацией движения.
Ниже следует описание примера осуществления настоящего изобретения со ссылками на прилагаемые иллюстрации.
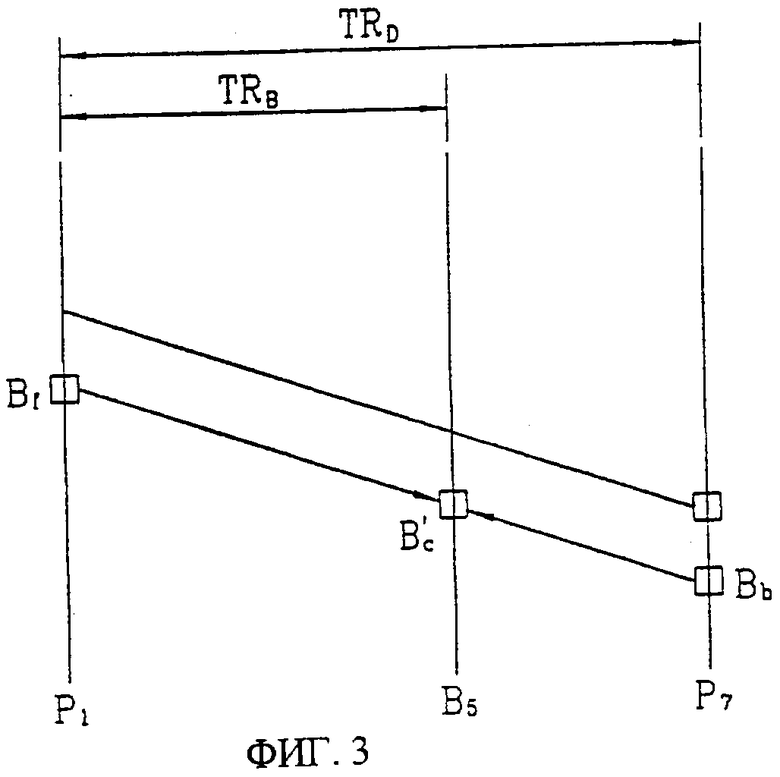
На фиг.2 представлена диаграмма, иллюстрирующая способ предсказания блока в режиме прямого предсказания по настоящему изобретению. Как видно из диаграммы, изображение включает I-кадр (не показан), закодированный с предсказанием только по декодируемым отсчетам внутри самого кадра, Р-кадры Р1, Р4 и Р7, закодированные с межкадровым предсказанием при использовании как максимум одного вектора движения по ранее декодированным опорным кадрам, и В-кадры В2, В3, В5 и В6, закодированные двумя блоками с межкадровым предсказанием по ранее декодированным опорным кадрам.
Далее, для удобства, приводится в первую очередь описание параметров, представленных на фиг.2. TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания (Р1) и последующим опорным кадром для режима прямого предсказания (Р7); TRB - временной интервал между предыдущим опорным кадром для режима прямого предсказания (Р1) и текущим В-кадром (В5); TRN - временной интервал между опорным кадром (Р4), ближайшим к текущему В-кадру, и текущим В-кадром (В5); MV - вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания (Р7); MV' f - вектор движения вперед в режиме прямого предсказания в направлении опорного кадра (Р4), ближайшего к текущему В-кадру, и MVb - вектор движения назад в режиме прямого предсказания в направлении последующего опорного кадра для режима прямого предсказания (Р7).
В данный момент вектор движения (MV) смещенного блока Bs в последующем опорном кадре для режима прямого предсказания (Р7) получают в процессе кодирования (или декодирования) последующего опорного кадра для режима прямого предсказания перед кодированием (или декодированием) текущего В-кадра.
Вышеизложенный способ предсказания блока в режиме прямого предсказания, по настоящему изобретению, описывается следующим образом.
Вектор движения вперед (MVf '), направленный к опорному кадру (Р4), наиболее близкому по времени среди предыдущих опорных кадров, получают из уравнения (4)

Кроме того, вектор движения назад (MVb), указывающий на последующий опорный кадр в режиме прямого предсказания (Р7), получают обычным способом с помощью уравнения (2)


Соответственно, блоки с компенсацией движения Bf и Вb получают по векторам движения MVf ' и MVb, рассчитанным по уравнениям (2) и (4).
С другой стороны, предсказанное значение Bc ' для блока Bc получают по двум вышеупомянутым блокам с компенсацией движения Bf и Вb. В тот момент В-кадр может находиться ближе к тому кадру, который расположен между опорным кадром, содержащим блок с компенсацией движения Bf, и тем последующим опорным кадром для режима прямого предсказания, в котором находится блок с компенсацией движения Вb.
Способ предсказания блока с использованием режима прямого предсказания по настоящему изобретению можно применить к фиг.1 и 2, и, следовательно, опорный кадр, содержащий блок с компенсацией движения Bf, является предыдущим опорным кадром для режима прямого предсказания (например, кадр Р1 на фиг.1) или опорным кадром, ближайшим к В-кадру (например, кадр Р4 на фиг.2).
Кроме того, в последовательности, содержащей меркнущий объект, яркость сплошных В-кадров может постепенно ослабляться или постепенно усиливаться, и, следовательно, предсказанная величина, полученная с помощью простого осреднения двух блоков с компенсацией движения Bf и Вb, как это делается по известной технологии, намного отличается от первоначального значения. Как результат, эффективность кодирования всей системы значительно снижается.
Поэтому для повышения точности блока, предсказываемого в режиме прямого предсказания, в способе предсказания блока с использованием режима прямого предсказания по настоящему изобретению осуществляется интерполяционное предсказание с учетом временного интервала между текущим В-кадром и опорным кадром, в котором находится блок с компенсацией движения Bf (то есть, предыдущим опорным кадром для режима прямого предсказания или опорным кадром, ближайшим к В-кадру), и с учетом временного интервала между текущим В-кадром и последующим опорным кадром для режима прямого предсказания.
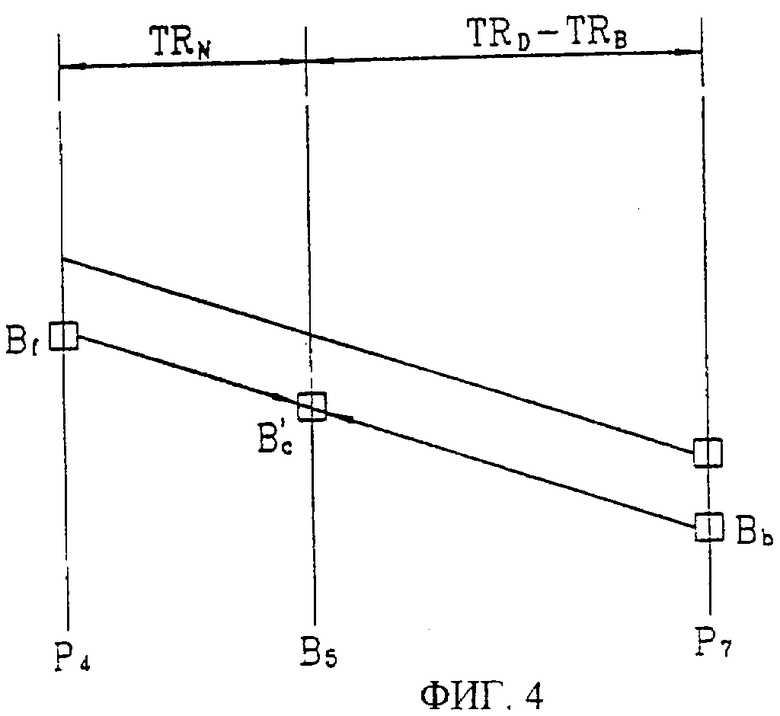
Как показано на фиг.3, если вектор движения вперед режима прямого предсказания получают с использованием известных средств, блок с компенсацией движения Bf находится в предыдущем опорном кадре для режима прямого предсказания (Р1), а блок с компенсацией движения Вb находится в последующем опорном кадре для режима прямого предсказания (Р7), то осуществляют интерполяционное предсказание по уравнению (5). В данном случае TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания (Р1) и последующим опорным кадром для режима прямого предсказания (Р7), a TRB - временной интервал между предыдущим опорным кадром для режима прямого предсказания (Р1) и текущим В-кадром (В5). В частности, способ интерполяционного предсказания включает в себя те же усредняющие вычисления, что и известные средства на тот случай, если В-кадр расположен в центре между предыдущим опорным кадром для режима прямого предсказания и последующим опорным кадром для режима прямого предсказания.

К тому же, как следует из фиг.4, в случае получения вектора движения вперед в режиме прямого предсказания в соответствии с настоящим изобретением, блок с компенсацией движения Bf находится в опорном кадре (Р4), ближайшем к текущему В-кадру, а блок с компенсацией движения Вb находится в последующем опорном кадре для режима прямого предсказания (Р7). Поэтому интерполяционное предсказание осуществляют по уравнению (6). В данном случае TRD - это временной интервал между предыдущим опорным кадром для режима прямого предсказания (Р1) и последующим опорным кадром для режима прямого предсказания (Р7), TRB - временной интервал между предыдущим опорным кадром для режима прямого предсказания (Р1) и текущим В-кадром, a TRN - временной интервал между опорным кадром (Р4), ближайшим к текущему В-кадру, и текущим В-кадром.

С другой стороны, соответствующие кадры могут быть представлены с помощью счетчика очередности кадров, т.е. может быть представлена информация о порядке отображения.
Следовательно, уравнения (5) и (6) могут быть представлены в виде уравнения (7) с использованием значений отсчета порядка кадров, которые отображают информацию о порядке соответствующих кадров. В данном случае Тc - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за текущим В-кадром; Tf - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за предыдущим опорным кадром для режима прямого предсказания, или значение порядкового отсчета кадров, т.е. информация о порядке отображения, закрепленная за опорным кадром, ближайшим к В-кадру, если вектор движения вперед рассчитывается по уравнению (4), а Тb - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за последующим опорным кадром для режима прямого предсказания.

Как было указано выше, согласно настоящему изобретению, вектор движения вперед в режиме прямого предсказания получают по вектору движения смещенного блока в последующем опорном кадре для режима прямого предсказания, а предсказанный блок кодируемого В-кадра получают интерполяционным предсказанием значений блоков с временной компенсацией. Следовательно, эффективность кодирования повышается по сравнению с кодированием известными средствами.
Кроме того, согласно настоящему изобретению, вектор движения вперед в режиме прямого предсказания получают по опорному кадру, ближайшему к В-кадру, подлежащему кодированию (или декодированию) в данный момент, и имеющему наибольшее сходство с В-кадром, а предсказываемый блок В-кадра получают путем применения интерполяционного предсказания по блокам с компенсацией движения по вышеупомянутым векторам движения вперед и назад в режиме прямого предсказания. Следовательно, точность предсказанного блока, а также эффективность кодирования могут быть повышены.
Так как данное изобретение может быть осуществлено по-разному, но без отступления от его сущности или существенных признаков, то следует иметь в виду, что вышеописанные примеры осуществления настоящего изобретения не ограничиваются никакими деталями вышеприведенного описания, если только на это нет иных указаний, а скорее должны толковаться в широком смысле в соответствии с сущностью и объемом изобретения, как это определено формулой изобретения, и, следовательно, все изменения и модификации, которые находятся в пределах этой формулы, или их эквиваленты, будут охватываться формулой изобретения.
Изобретение относится к системе кодирования движущегося изображения и, в частности, к способу предсказания блока с использованием усовершенствованного режима прямого предсказания для В-кадров. Сущность способа предсказания заключается в том, что получают векторы движения вперед и назад в режиме прямого предсказания, получают два отдельных блока с компенсацией движения с использованием векторов движения вперед и назад и предсказывают блок В-кадра, подлежащего в данный момент кодированию или декодированию, путем применения интерполяционного предсказания по вышеуказанным блокам. Технический результат, достигаемый при осуществлении способа, состоит в повышении точности предсказания и эффективности кодирования. 4 н. и 10 з.п. ф-лы, 4 ил.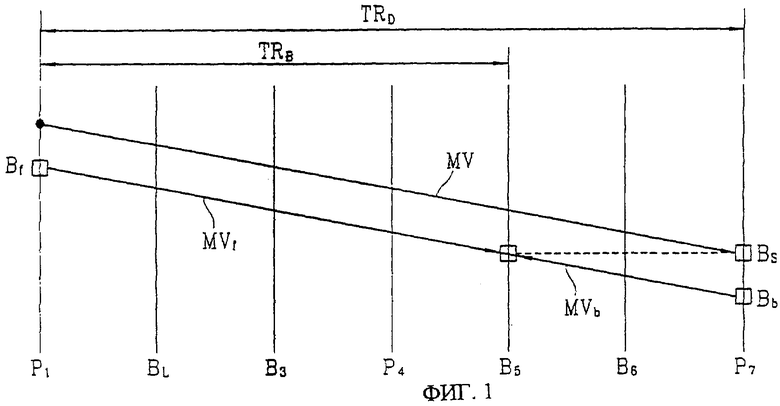
первая операция - получение вектора движения вперед в режиме прямого предсказания для В-кадра, подлежащего кодированию или декодированию;
вторая операция - получение вектора движения назад в режиме прямого предсказания для В-кадра, подлежащего кодированию или декодированию;
третья операция - получение двух отдельных блоков с компенсацией движения путем использования векторов движения вперед и назад в режиме прямого предсказания, полученных на первой и второй операциях; и
четвертая операция - предсказание блока В-кадра, подлежащего кодированию или декодированию в настоящий момент, путем применения интерполяционного предсказания по двум отдельным блокам с компенсацией движения путем использования временного интервала между соответствующими опорными кадрами, при этом на четвертой операции предсказывают блок В-кадра по следующему уравнению:

где  - предсказанное значение блока, подлежащего кодированию или декодированию;
- предсказанное значение блока, подлежащего кодированию или декодированию;
Bf - блок с компенсацией движения по вектору движения вперед в режиме прямого предсказания;
Вb - блок с компенсацией движения по вектору движения назад в режиме прямого предсказания;
TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания и последующим опорным кадром для режима прямого предсказания и
TRB - временной интервал между предыдущим опорным кадром для режима прямого предсказания и текущим В-кадром,
причем предыдущий опорный кадр для режима прямого предсказания является опорным кадром, на который указывает вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания.
где MVf - вектор движения вперед в режиме прямого предсказания, указывающий на предыдущий опорный кадр для режима прямого предсказания;
TRB - временной интервал между предыдущим опорным кадром для режима прямого предсказания и текущим В-кадром;
MV - вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания и
TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания и последующим опорным кадром для режима прямого предсказания.
первая операция - получение вектора движения вперед в режиме прямого предсказания для В-кадра, подлежащего кодированию или декодированию;
вторая операция - получение вектора движения назад в режиме прямого предсказания для В-кадра, подлежащего кодированию или декодированию;
третья операция - получение двух отдельных блоков с компенсацией движения путем использования векторов движения вперед и назад в режиме прямого предсказания и
четвертая операция - предсказание блока В-кадра, подлежащего кодированию или декодированию в данный момент, путем применения интерполяционного предсказания по двум отдельным блокам с компенсацией движения путем использования временного интервала между соответствующими опорными кадрами, при этом на четвертой операции предсказывают блок В-кадра по следующему уравнению:

где  - предсказанное значение блока, подлежащего кодированию или декодированию;
- предсказанное значение блока, подлежащего кодированию или декодированию;
Bf - блок с компенсацией движения по вектору движения вперед в режиме прямого предсказания, указывающему на опорный кадр, ближайший к текущему В-кадру;
Вb - блок с компенсацией движения по вектору движения назад в режиме прямого предсказания;
TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания и последующим опорным кадром для режима прямого предсказания;
TRB - временной интервал между предыдущим опорным кадром для режима прямого предсказания и текущим В-кадром и
TRN - временной интервал между опорным кадром, ближайшим к текущему В-кадру, и текущим В-кадром,
причем предыдущий опорный кадр для режима прямого предсказания является опорным кадром, на который указывает вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания.
где MVf - вектор движения вперед в режиме прямого предсказания, указывающий на опорный кадр, ближайший к текущему В-кадру;
TRN - временной интервал между опорным кадром, ближайшим к текущему В-кадру, и текущим В-кадром;
MV - вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания и
TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания и последующим опорным кадром для режима прямого предсказания, в котором предыдущий опорный кадр для режима прямого предсказания является опорным кадром, на который указывает вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания.
первая операция - получение вектора движения вперед в режиме прямого предсказания для В-кадра, подлежащего кодированию или декодированию;
вторая операция - получение вектора движения назад в режиме прямого предсказания для В-кадра, подлежащего кодированию или декодированию;
третья операция - получение двух отдельных блоков с компенсацией движения путем использования векторов движения вперед и назад для режима прямого предсказания и
четвертая операция - предсказание блока В-кадра, подлежащего кодированию или декодированию в данный момент, путем применения интерполяционного предсказания по двум отдельным блокам с компенсацией движения путем использования информации о порядке отображения между соответствующими опорными кадрами, при этом на четвертой операции предсказывают блок В-кадра по следующему уравнению:
где  - предсказанное значение блока, подлежащего кодированию или декодированию, в В-кадре;
- предсказанное значение блока, подлежащего кодированию или декодированию, в В-кадре;
Bf - блок с компенсацией движения по вектору движения вперед в режиме прямого предсказания;
Тc - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за текущим В-кадром;
Tf - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за опорным кадром, ближайшим к В-кадру, в случае, когда вектор движения вперед в режиме прямого предсказания получают по опорному кадру, ближайшему к В-кадру, и
Тb - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за последующим опорным кадром для режима прямого предсказания.
где MVf - вектор движения вперед в режиме прямого предсказания, указывающий на опорный кадр, ближайший к текущему В-кадру;
TRN - временной интервал между опорным кадром, ближайшим к текущему В-кадру, и текущим В-кадром;
MV - вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания и
TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания и последующим опорным кадром для режима прямого предсказания,
причем предыдущий опорный кадр для режима прямого предсказания является опорным кадром, на который указывает вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания.
первая операция - получение вектора движения вперед в режиме прямого предсказания для В-кадра, подлежащего кодированию или декодированию;
вторая операция - получение вектора движения назад в режиме прямого предсказания для В-кадра, подлежащего кодированию или декодированию;
третья операция - получение двух отдельных блоков с компенсацией движения путем использования векторов движения вперед и назад для режима прямого предсказания и
четвертая операция - предсказание блока В-кадра, подлежащего кодированию или декодированию в данный момент, путем применения интерполяционного предсказания по двум отдельным блокам с компенсацией движения путем использования информации о порядке отображения между соответствующими опорными кадрами, при этом на четвертой операции предсказывают блок В-кадра по следующему уравнению:
где  - предсказанное значение блока, подлежащего кодированию или декодированию, в В-кадре;
- предсказанное значение блока, подлежащего кодированию или декодированию, в В-кадре;
Bf - блок с компенсацией движения по вектору движения вперед в режиме прямого предсказания;
Тc - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за текущим В-кадром;
Tf - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за предыдущим опорным кадром для режима прямого предсказания, являющимся опорным кадром, на который указывает вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания, и
Тb - значение отсчета порядка кадров, т.е. информация о порядке отображения, закрепленная за последующим опорным кадром для режима прямого предсказания.
где MVf - вектор движения вперед в режиме прямого предсказания, указывающий на предыдущий опорный кадр для режима прямого предсказания;
TRB - временной интервал между предыдущим опорным кадром для режима прямого предсказания и текущим В-кадром;
MV - вектор движения смещенного блока в последующем опорном кадре для режима прямого предсказания и
TRD - временной интервал между предыдущим опорным кадром для режима прямого предсказания и последующим опорным кадром для режима прямого предсказания.
Приоритет по пунктам:
| US 6014186 А, 11.01.2000 | |||
| RU 2182727 С2, 20.05.2002 | |||
| RU 2137194 C1, 10.09.1999 | |||
| RU 2003174 C1, 15.01.1993 | |||
| Беззазорная зубчатая передача | 1979 |
|
SU896300A1 |
| US 5911008 А, 08.06.1999 | |||
| Управляемый преобразователь законов распределения вероятностей | 1980 |
|
SU898427A1 |

