Техническое решение относится к области управления импульсными системами с гидравлическим приводом и может найти применение в горном деле и строительстве при разработке гидравлических ударных машин.
Известен способ управления рабочим циклом гидравлической ударной машины, реализованный в конструкции гидромолота финской фирмы Rammer (А.П.Архипенко, А.И.Федулов. Гидравлические ударные машины. Новосибирск: ИГД СО АН СССР, 1991, стр. 12), заключающийся в подключении камеры обратного хода постоянно к системе, состоящей из источника расхода жидкости и аккумулятора, а камеры прямого хода - попеременно при помощи гидрораспределительного устройства, состоящего из гидрораспределителя и клапана давления, то к источнику расхода жидкости по сигналу датчика верхнего положения ударника, то к сливу в бак после задержки ударника перед началом обратного хода и достижения в системе заранее установленной величины Р3 давления.
Недостатком этого способа является разобщенность и независимость работы клапана давления и гидрораспределителя, которые входят в состав гидрораспределительного устройства. Это приводит к тому, что в конце прямого хода ударника, когда гидрораспределителем соединяют камеру прямого хода со сливным каналом, перекрытым клапаном давления, камера прямого хода оказывается замкнутой, и еще движущийся ударник создает в ней разрежение, что приводит к возникновению кавитации. После удара по инструменту ударник под действием возрастающего давления жидкости в камере обратного хода совершает колебания на кавитирующей жидкости в камере прямого хода, вызывая в этой камере и связанных с ней аппаратуре и трубопроводах гидравлические удары и сбои в системе управления. При этом часть энергии гидравлической ударной машины теряется, что приводит к снижению ее мощности и как следствие коэффициента полезного действия. Необходимость переключения гидрораспределителя в конце прямого хода и соединения камеры прямого хода со сливным каналом приводит к тому, что ударник разгоняется только на части прямого хода, на оставшейся же части прямого хода ударник не разгоняется, а тормозится усилием от давления жидкости в камере обратного хода. Это приводит к уменьшению энергии удара гидравлической ударной машины.
Наиболее близким решением по технической сущности и совокупности существенных признаков является способ управления рабочим циклом гидравлической ударной машины (далее ГУМ) по патенту РФ №2182967, кл. Е 21 С 37/00, E 02 D 7/10, опубликованный в Бюл. №15, 2002 г., заключающийся в подключении камеры обратного хода постоянно к системе, состоящей из источника расхода жидкости и аккумулятора, а камеры прямого хода - попеременно при помощи гидрораспределительного устройства, гидрораспределитель которого включает первую и вторую камеры управления, то к источнику расхода жидкости по сигналу датчика верхнего положения ударника, то к сливу в бак после задержки ударника перед началом обратного хода и достижения в системе заранее установленной величины Р3 давления. Указанное попеременное подключение камеры прямого хода осуществляют используемым в качестве гидрораспределительного устройства гидрораспределителем, первую камеру управления которого соединяют с источником расхода жидкости, а вторую - с датчиком верхнего положения ударника. При давлении в системе, большем величины Р3, гидрораспределителем соединяют камеру прямого хода с источником расхода жидкости по сигналу датчика верхнего положения ударника в течение времени, пока давление в системе не станет равным или меньшим величины Р3. После этого гидрораспределителем продолжают соединять камеру прямого хода с источником расхода жидкости путем дополнительного силового воздействия со стороны второй камеры управления.
Недостатком данного технического решения является невозможность оперативного изменения частоты и энергии удара в процессе работы ГУМ в зависимости от конкретных условий: твердости разрушаемого материала, неровности рельефа его поверхности и т.д. (что неизбежно в естественных условиях), поскольку не предусмотрено управление энергией удара и частотой ГУМ и возможность вручную ею управлять, что особенно важно при работе ГУМ в составе сложной гидроударной системы, состоящей из нескольких ГУМ (например, гидроударной системы, управляющей ковшом активного действия).
Кроме того, при подключении камеры прямого хода по сигналу датчика верхнего положения ударника к аккумулятору и источнику расхода жидкости ударник по инерции продолжает некоторое движение вверх, что может привести к гидроудару в камере прямого хода, сбоям в системе управления и потере части энергии ГУМ.
Технической задачей предлагаемого способа является повышение эффективности работы ГУМ за счет регулирования момента переключения ударника с обратного хода на прямой и обратно в зависимости от конкретных условий работы ГУМ и рекуперирования энергии обратного хода ударника. Дополнительный эффект - повышение надежности работы за счет рекуперирования энергии обратного хода ударника.
Она достигается тем, что в способе управления рабочим циклом гидравлической ударной машины, заключающемся в подключении камеры обратного хода постоянно к системе, состоящей из источника расхода жидкости и аккумулятора, а камеры прямого хода - попеременно то к источнику расхода жидкости по сигналу управления переходом ударника на прямой ход, то к сливу в бак по сигналу управления переходом ударника на обратный ход после задержки ударника, с помощью гидрораспределителя, содержащего первую и вторую камеры управления, на вторую камеру управления которого, соединенную с датчиком верхнего положения ударника, постоянно оказывают дополнительное силовое воздействие, согласно техническому решению указанное попеременное подключение камеры прямого хода осуществляют посредством быстродействующего клапана, соединенного с источником расхода жидкости, со сливом в бак и с первой камерой управления гидрораспределителя. При этом сигналы управления переходом ударника на прямой и обратный ход подают на быстродействующий клапан с блока управления, причем с блока управления или вручную устанавливают задержки во времени подачи этих сигналов для переключения быстродействующего клапана относительно момента синхронизации, задаваемого датчиком синхронизации, в соответствии с величиной сигнала датчика условий работы.
Указанная совокупность признаков позволяет изменять режим работы гидрораспределителя в процессе работы ГУМ в зависимости от конкретных условий: твердости разрушаемого материала, неровности рельефа его поверхности и т.д. Таким образом, предлагаемый способ дает возможность изменять момент переключения ударника с обратного хода на прямой и с прямого на обратный, оперативно регулируя по заданной программе или вручную энергию и частоту ГУМ, что значительно повышает эффективность ее работы.
Целесообразно энергию обратного хода ударника рекуперировать с помощью вспомогательного аккумулятора, подключенного к камере прямого хода. При движении ударника по обратному ходу в камере прямого хода резко повышается давление жидкости. Из-за этого в системе гидрораспределения возможны гидроудары, приводящие к нарушению работы гидрораспределителя и кавитации жидкости. Подключение к камере прямого хода вспомогательного аккумулятора, рекуперирующего эту избыточную энергию, позволяет избежать этого, т.е. повысить надежность ГУМ, а также использовать энергию обратного хода ударника на прямом ходу, что значительно повышает мощность ГУМ и как следствие эффективность ее работы.
Сущность технического решения поясняется примером реализации и чертежом, на котором приведена схема способа управления рабочим циклом ГУМ.
По заявляемому способу ГУМ управляют с помощью гидрораспределителя 1, который содержит первую 2 и вторую 3 камеры управления. Камера 4 обратного хода ГУМ подключена постоянно к системе, состоящей из источника 5 расхода жидкости и аккумулятора 6, а камера 7 прямого хода - попеременно при помощи гидрораспределителя 1 то к источнику 5 расхода жидкости по сигналу управления переходом ударника 8 на прямой ход посредством датчика 9 верхнего положения ударника 8, то к сливу в бак 10 по сигналу управления переходом ударника 8 на обратный ход после задержки ударника 8. Ударник 8 при движении в корпусе 11 вверх совершает обратный ход, при движении вниз - прямой ход. В конце прямого хода ударник 8 наносит удар по инструменту 12. Первая камера 2 управления гидрораспределителя 1 соединена с источником 5 расхода жидкости и аккумулятором 6, а вторая камера 3 управления поджата пружиной 13 и управляется от датчика 9 верхнего положения ударника 8.
Согласно предлагаемому техническому решению, указанное попеременное подключение камеры 7 прямого хода осуществляют посредством быстродействующего клапана 14, соединенного с источником 5 расхода жидкости, со сливом в бак 10 и с первой камерой 2 управления гидрораспределителя 1. При этом сигналы управления переходом ударника 8 на прямой и обратный ход подают на быстродействующий клапан 14 с блока 15 управления. С блока 15 управления или вручную устанавливают задержки во времени подачи этих сигналов для переключения быстродействующего клапана 14 относительно момента синхронизации, задаваемого датчиком 16 синхронизации в соответствии с величиной сигнала датчика 17 условий работы ГУМ, установленного на инструменте 12. Для накопления энергии обратного хода ударника 8 и предотвращения гидроударов в системе энергию обратного хода ударника 8 рекуперируют, подключив вспомогательный аккумулятор 18 к камере 7 прямого хода.
Управление рабочим циклом ГУМ осуществляют следующим образом. В момент начала переключения гидрораспределителя 1 на управление переходом ударника 8 на обратный ход датчиком 16 синхронизации подают синхроимпульс на блок 15 управления. При изменении условий работы ГУМ, когда необходимо снижение энергии ударов (при изменении твердости разрушаемой породы, рельефа разрабатываемого материала или в начальный момент забивки в грунт конструкций, например свай, труб, и т.д.), датчиком 17 условий работы подают сигнал, в соответствии с величиной которого блоком 15 управления сразу после прихода синхроимпульса формируют первую задержку во времени на переключение быстродействующего клапана 14 в зависимости от требуемой продолжительности обратного хода ударника 8. После отработки первой задержки во времени блоком 15 управления формируют импульс переключения быстродействующего клапана 14, который передают на него и переключают его на сливной бак 10 на время, достаточное для устойчивого переключения первой камеры 2 гидрораспределителя 1 на управление переходом ударника 8 «досрочно» на прямой ход, т.е. пружиной 13 переключают гидрораспределитель 1, соединяя источник 5 расхода жидкости, камеру 7 прямого хода и камеру 4 обратного хода. Таким образом, первой задержкой во времени переключения быстродействующего клапана 14 на слив 10 регулируют энергию удара ГУМ.
Далее посредством блока 15 управления обеспечивают вторую задержку во времени переключения быстродействующего клапана 14, задаваемую синхроимпульсом относительно момента синхронизации, который формируют датчиком 16 синхронизации. Вторая задержка превышает максимальное время прямого хода и восстановление заданного уровня давления в аккумуляторе 6. Таким образом, посредством быстродействующего клапана 14 переключают первую камеру 2 гидрораспределителя 1 на источник 5 расхода жидкости. Так как к этому времени давление в системе превышает необходимое для управления переходом ударника 8 на обратный ход, камера 2 соединяется со сливом и ударник 8 начинает движение на обратный ход. Цикл повторяется. Вторая задержка во времени переключения быстродействующего клапана 14 на источник 5 расхода жидкости таким образом позволяет изменять частоту работы ГУМ практически в любом диапазоне.
Безусловно, возможно и ручное регулирование задержек во времени переключения быстродействующего клапана 14. Если первая из устанавливаемых задержек каким-либо образом превысит максимальное время обратного хода, то переключение гидрораспределителя 1 произойдет по сигналу датчика 9 верхнего положения ударника 8. Если к тому же вторая устанавливаемая задержка будет меньше времени восстановления давления в системе, то переключение ударника 8 на обратный ход произойдет по достижении в системе заданного давления (т.е. в точном соответствии с прототипом).
После торможения ударника 8 на обратном ходу энергию обратного хода ударника 8 рекуперируют с помощью вспомогательного аккумулятора 18, подключенного к камере 7 прямого хода. Таким образом предотвращают возможные гидроудары в системе и накапливают энергию обратного хода ударника 8 для нанесения удара по инструменту 12, значительно увеличивая этим мощность ГУМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ УДАРНАЯ МАШИНА | 2006 |
|
RU2311532C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ЦИКЛОМ ГИДРАВЛИЧЕСКОЙ УДАРНОЙ МАШИНЫ | 2000 |
|
RU2182967C1 |
| ГИДРАВЛИЧЕСКАЯ УДАРНАЯ МАШИНА | 2012 |
|
RU2495991C1 |
| Гидравлическая ударная машина двухстороннего действия с управляемой камерой прямого хода | 2017 |
|
RU2652405C1 |
| ГИДРАВЛИЧЕСКАЯ УДАРНАЯ МАШИНА (ВАРИАНТЫ ) | 2002 |
|
RU2230189C1 |
| ГИДРАВЛИЧЕСКАЯ УДАРНАЯ МАШИНА (ВАРИАНТЫ) | 2002 |
|
RU2209878C1 |
| ГИДРАВЛИЧЕСКАЯ УДАРНАЯ МАШИНА | 2005 |
|
RU2298073C1 |
| ГИДРОПРИВОД ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2021 |
|
RU2779011C1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2004 |
|
RU2265721C1 |
| ГИДРОПРИВОД ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2004 |
|
RU2277644C1 |
Изобретение относится к области управления импульсными системами с гидроприводом и может найти применение в горном деле и строительстве при разработке гидравлических ударных машин. Обеспечивает повышение эффективности и надежности работы гидравлической ударной машины. Способ заключается в подключении камеры обратного хода постоянно к системе, состоящей из источника расхода жидкости и аккумулятора, а камеры прямого хода попеременно: то к источнику расхода жидкости по сигналу управления переходом ударника на прямой ход, то к сливу в бак по сигналу управления переходом ударника на обратный ход после задержки ударника, с помощью гидрораспределителя, содержащего первую и вторую камеры управления. На вторую камеру управления гидрораспределителя, соединенную с датчиком верхнего положения ударника, постоянно оказывают дополнительное силовое воздействие. Попеременное подключение камеры прямого хода осуществляют посредством быстродействующего клапана, соединенного с источником расхода жидкости, со сливом в бак и с первой камерой управления гидрораспределителя. Сигналы управления переходом ударника на прямой и обратный ход подают на быстродействующий клапан с блока управления. С блока управления или вручную устанавливают задержки во времени подачи этих сигналов для переключения быстродействующего клапана относительно момента синхронизации, задаваемого датчиком синхронизации, в соответствии с величиной сигнала датчика условий работы. 1 з.п.ф-лы, 1 ил.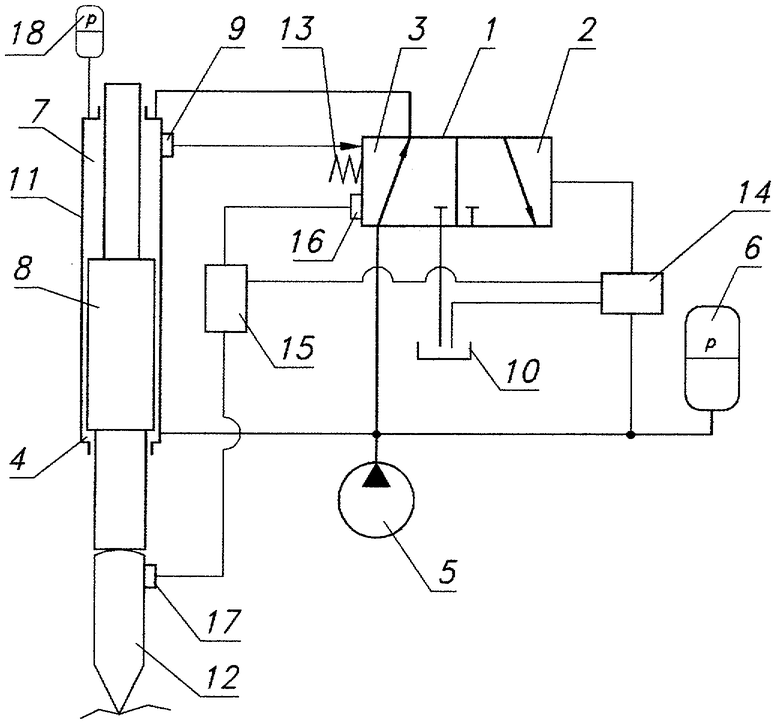
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ЦИКЛОМ ГИДРАВЛИЧЕСКОЙ УДАРНОЙ МАШИНЫ | 2000 |
|
RU2182967C1 |

