Изобретение относится к области приборостроения, а именно к устройствам для управления фазой волнового фронта светового пучка в интерферометре посредством механических колебаний одного из зеркал интерферометра, и может быть использовано для измерения корреляционных и спектральных параметров в оптических схемах даже с низкокогерентными источниками излучения, а также в интерферометрии при исследовании внутренней структуры объектов и в технической диагностике, например, для контроля технологических процессов.
Изобретение направлено на обеспечение как можно более жесткого соответствия закона движения триангулярному закону (на периоде колебания в течение первой половины периода движение осуществляется с постоянной скоростью в одном направлении, в течение второй половины - в обратном направлении, т.е. скорость изменяется по закону меандра) при модуляции положения зеркала в опорном плече в высокочувствительной интерферометрии в схеме с интерферометром Майкельсона при достаточно высокой частоте модуляции. Обеспечение жесткого соответствия закона движения триангулярному важно, во-первых, для получения высокой чувствительности приема интерференционного сигнала, так как при высокой стабильности скорости перемещения зеркала соответственно высока и стабильность центральной частоты доплеровского интерференционного сигнала, который можно пропустить через узкополосный радиотехнический фильтр и без потери информации о его амплитуде повысить динамический диапазон измерительной схемы. Во-вторых, жесткое соответствие закона движения триангулярному важно при таком использовании электромеханического модулятора, когда при исследовании корреляционных характеристик источника излучения необходима стабильность скорости сканирования для обеспечения четкого соответствия между пространственным и временным интервалами, позволяющего по временным интервалам между импульсами определить их разделение в пространстве, т.е. их корреляционные характеристики. Высокая же частота модуляции положения зеркала необходима для быстрого получения скана, что позволяет избавиться от влияния низкочастотных механических наводок: чем выше скорость движения зеркала, тем меньше ее относительные флуктуации за счет внешних низкочастотных шумов. К тому же повышается наглядность и удобство визуализации интерференционной картинки. Однако здесь возникают сложности, обусловленные тем, что при высоких частотах модуляции положения зеркала отклик механической колебательной системы, которой по сути и является подвижная часть модулятора, перестает повторять закон управляющей силы. Кроме того, электромеханический модулятор должен обладать высокой угловой стабильностью оси для обеспечения четкого согласования фазовых фронтов интерферирующих пучков на протяжении полного размаха модуляции.
Известен модулятор, позволяющий изменять практически безынерционно длину плеча интерферометра, а следовательно, и разность оптических длин плеч по меньшей мере на несколько десятков рабочих длин волн интерферометра. Этот модулятор выполнен в виде оптоволоконной управляемой линии задержки на основе оптоволоконного пьезоэлектрического преобразователя и используется в волоконном интерферометре (патент RU № 2100787, МПК6 G 02 F 1/01, G 01 J 9/02, публ. 27.12.97 г.). Оптоволоконный пьезоэлектрический модулятор содержит пьезокерамическую пластину, на противоположных поверхностях которой размещены электроды и оптическое волокно. Под действием электрического поля в пьезокерамической пластине создается напряжение (стресс), которое передается на волокно, пропорционально меняя оптический ход через данную оптоволоконную линию задержки. Упомянутая пьезокерамическая пластина выполнена в форме диска, а волокно уложено в форме спирали, что обеспечивает возможность изменения длины оптического волокна в широких пределах при безынерционности и малых габаритах преобразователя. Использование этого модулятора предпочтительно в схемах волоконной оптики. В противном случае появляется проблема ввода пространственного излучения в одномодовое волокно и вывода из него, что приводит к неизбежным потерям, например в гибридных волоконно-воздушных интерференционных схемах усложняется контроль поляризации, на сварках и на стыках волокна происходит замешивание поляризации. В связи со значительной длиной волокна, используемого в этом модуляторе, затрудняется точный контроль разности длин плеч интерферометра. Таким образом, в ряде задач в оптических схемах с воздушным интерферометром Майкельсона нецелесообразно использование вышеописанного модулятора разности длин плеч в виде оптоволоконной управляемой линии задержки.
В оптических схемах с воздушным интерферометром Майкельсона, в Фурье спектрометрах видимого и ПК диапазона известен механический модулятор разности длин плеч интерферометра или, другими словами, модулятор разности хода двух оптических пучков (SU № 1569789, МПК5 G 02 F 1/01, публ. 1990). Этот известный механический модулятор обеспечивает достаточно большую амплитуду, частоту модуляции и виброустойчивость конструкции. Он содержит привод вращательного движения, на оси вала которого установлены первая и вторая плоскопараллельные пластины, повернутые одна относительно другой на угол α. При этом первый луч (первый оптический пучок) проходит сквозь первую вращающуюся пластину, а второй луч (второй оптический пучок) - сквозь вторую вращающуюся пластину, в результате чего разность хода между первым и вторым оптическими пучками непрерывно меняется. Недостатком данного модулятора разности хода двух оптических пучков является то, что в такой конструкции невозможно обеспечить постоянство скорости модуляции, т.е. требуемый закон меандра изменения скорости модуляции.
Наиболее близким по технической сущности заявленному является электромеханический модулятор от известной фирмы PASCO (США) (www.pasco.com) - устройство из серии Mechanical Wave Drivers. Известный электромеханический модулятор содержит подвижную часть, прикрепленную с помощью мягкого подвеса к неподвижному каркасу. В подвижной части находится катушка из провода (импеданс 4 Ома), помещенная в область стационарного радиального магнитного поля, создаваемого постоянным кольцевым магнитом. При пропускании через катушку переменного управляющего электрического тока на нее со стороны магнитного поля действует соответствующая переменная сила, приводящая всю подвижную часть в колебательное движение в соответствии с законом управляющей силы. Подвижная часть снабжена приспособлением для закрепления внешних объектов, например зеркал, которые необходимо двигать по определенному закону. Электромеханический модулятор снабжен внешним генератором и усилителем мощности и используется в различных экспериментальных установках, а также для механической модуляции разности длин плеч в интерферометре.
Недостатком данного электромеханического модулятора является отсутствие возможности контроля за движением - отклик подвижной части модулятора на воздействие переменной управляющей силой обладает фазовыми и нелинейными искажениями, затрудняющими воссоздание закона движения с требуемой точностью.
Задачей, на решение которой направлено настоящее изобретение, является разработка электромеханического модулятора разности длин плеч интерферометра, обеспечивающего сканирование зеркала интерферометра с законом изменения скорости, как можно более точно соответствующим требуемому закону меандра, при достаточно высокой частоте (до 50 Гц) сканирования и достаточно большом размахе колебаний (до 10 мм).
Технический результат в разработанном электромеханическом модуляторе разности длин плеч интерферометра, так же как и в электромеханическом модуляторе-прототипе, достигается за счет того, что он содержит генератор формы сигнала, усилитель мощности и электромеханический блок, включающий в себя первую неподвижную магнитную систему, жестко соединенную с неподвижной массивной основой и первую катушку из токоведущего провода, который соединен с выходом усилителя мощности. При этом первая катушка расположена с возможностью перемещения поперек линий магнитного поля первой магнитной системы.
Новым в разработанном электромеханическом модуляторе разности длин плеч интерферометра является то, что в него введены интегратор и корректор амплитудно-частотной характеристики электромеханического блока, а в электромеханический блок введены вторая неподвижная магнитная система и вторая катушка из токоведущего провода, жестко и соосно соединенная с первой катушкой. Соединение же первой и второй катушек с неподвижным основанием выполнено в виде мягкого подвеса с возможностью перемещения первой и второй катушек, образующих подвижную часть модулятора, относительно неподвижных соответственно первой и второй магнитных систем поперек линий их магнитного поля, при этом выход упомянутого генератора формы сигнала соединен с прямым входом интегратора, инвертирующий вход которого соединен с датчиком скорости подвижной части модулятора, выход интегратора соединен со входом корректора амплитудно-частотной характеристики электромеханического блока, к выходу которого присоединен вход упомянутого усилителя мощности.
В одном частном случае целесообразно в качестве датчика скорости подвижной части модулятора использовать электромеханический датчик скорости в виде упомянутой второй катушки, установленной с возможностью перемещения поперек линий магнитного поля второй неподвижной магнитной системы, при этом токоведущий провод второй катушки необходимо соединить с упомянутым инвертирующим входом интегратора, а в качестве первой и второй магнитных систем использовать стандартные магнитные системы акустических динамиков, при этом первую и вторую катушки необходимо укрепить на противоположных концах металлического стержня.
В другом частном случае целесообразно в качестве датчика скорости подвижной части модулятора использовать оптический датчик скорости в виде дополнительного компактного интерферометра Майкельсона, одно из зеркал которого следует закрепить на подвижной части модулятора. Источником излучения для упомянутого дополнительного компактного интерферометра Майкельсона может служить диодный лазер с достаточно узкой шириной спектра излучения, на выходе же упомянутого компактного интерферометра Майкельсона целесообразно установить фотоприемник, соединенный с преобразователем частоты в напряжение, выход которого следует соединить с упомянутым инвертирующим входом интегратора, а токоведущие провода первой и второй катушек соединить с выходом усилителя мощности.
На фиг.1 представлена структурная схема разработанного электромеханического модулятора разности длин плеч интерферометра в общем случае его выполнения в соответствии с п.1 формулы.
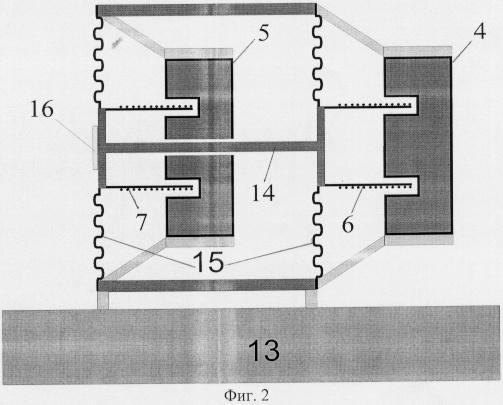
На фиг.2 представлен вид сбоку в разрезе электромеханического блока разработанного модулятора в первом частном случае его выполнения в соответствии с п.2 формулы.
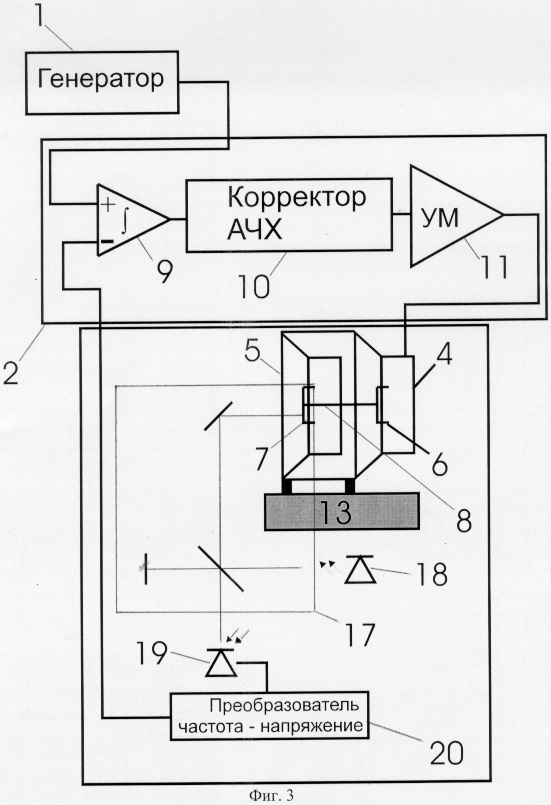
На фиг.3 представлена структурная схема разработанного электромеханического модулятора разности длин плеч интерферометра во втором частном случае его выполнения в соответствии с п.3 формулы.
На фиг.4 представлен внешний вид опытного образца разработанного электромеханического модулятора, изготовленного в соответствии с п.2 формулы изобретения.
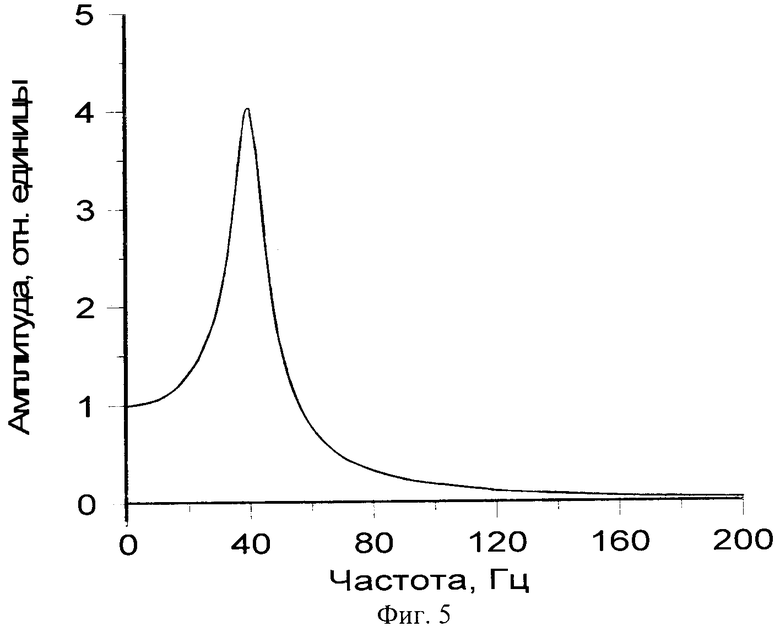
На фиг.5 представлена амплитудно-частотная характеристика электромеханического блока модулятора.
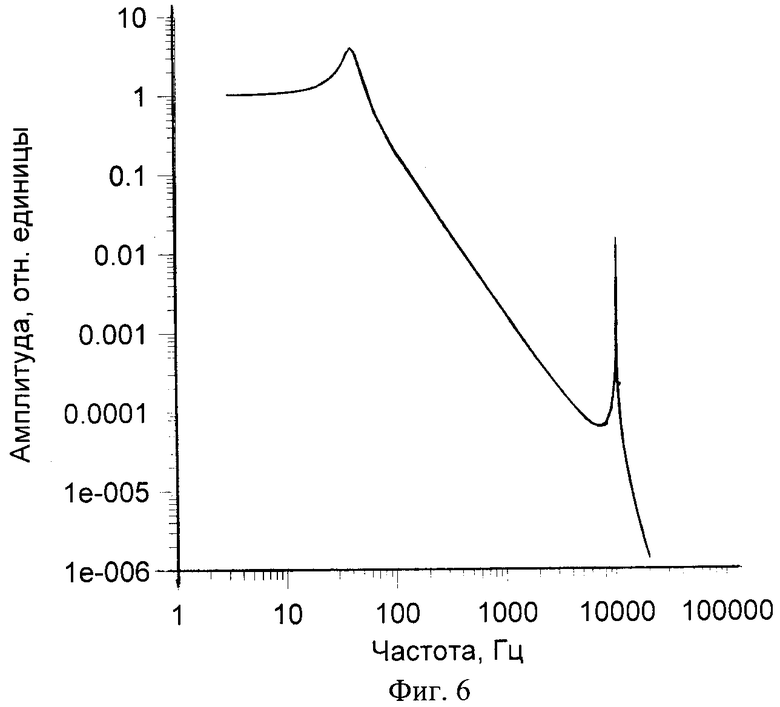
На фиг.6 представлена амплитудно-частотная характеристика электромеханического блока модулятора с учетом высокочастотных паразитных резонансов.
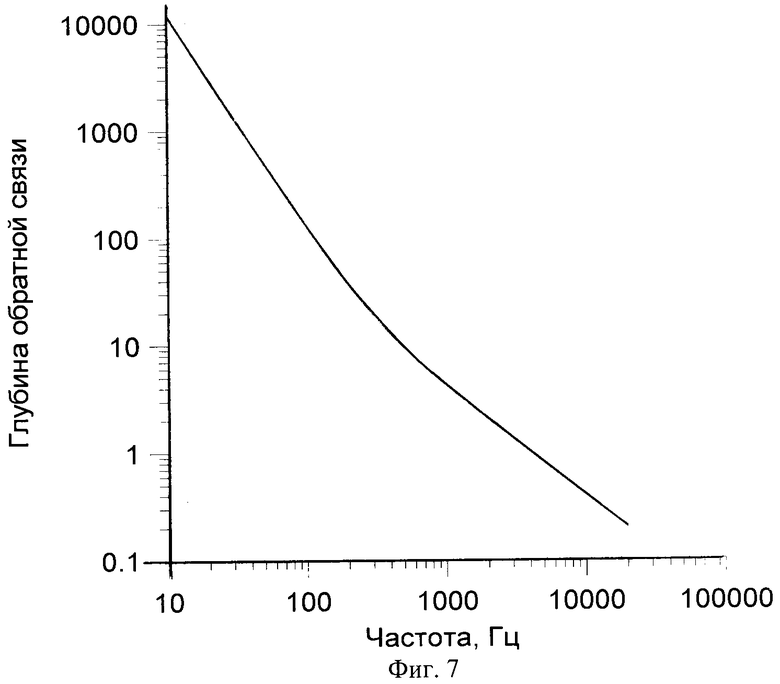
На фиг.7 представлена амплитудно-частотная характеристика глубины обратной связи разработанного электромеханического модулятора.
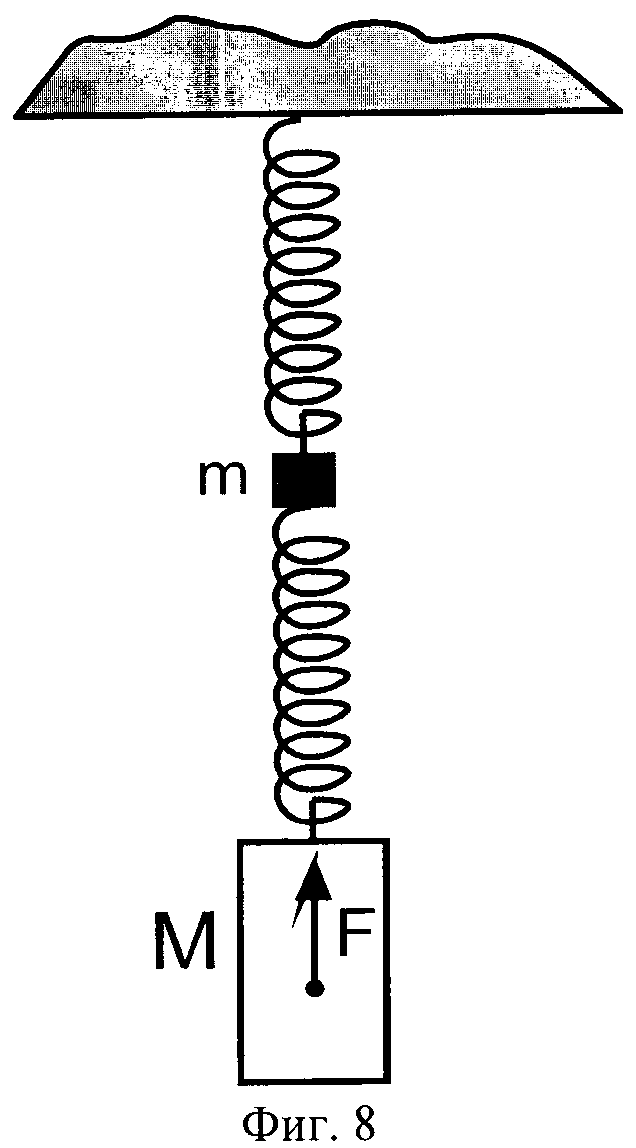
На фиг.8 представлена механическая колебательная система, эквивалентная подвижной части электромеханического блока.
Разработанный электромеханический модулятор, представленный на фиг.1, содержит генератор 1 формы сигнала, блок электронного управления 2 и электромеханический блок 3. Электромеханический блок 3 содержит первую и вторую неподвижные магнитные системы 4 и 5 и первую и вторую катушки 6 и 7 из токоведущего провода, расположенные с возможностью перемещения поперек линий магнитного поля соответствующих магнитных систем 4 и 5 и образующие подвижную часть 8 электромеханического модулятора. Кроме того, электромеханический блок 3 содержит датчик скорости 12 подвижной части 8 модулятора. Блок электронного управления 2 содержит интегратор 9, корректор 10 амплитудно-частотной характеристики (АЧХ) и усилитель мощности 11. При этом прямой вход интегратора 9 соединен с выходом генератора 1 формы сигнала, а инвертирующий вход интегратора 9 соединен с выходом датчика скорости 12 подвижной части 8 модулятора, выход же интегратора 9 соединен со входом корректора АЧХ 10. Выход корректора 10 соединен со входом усилителя мощности 11, выход которого соединен с токоведущим проводом первой катушки 6. Неподвижные магнитные системы 4 и 5 жестко соединены с неподвижным массивным основанием 13. Катушки 6 и 7 соединены между собой жестко и соосно, при этом соединение этих катушек 6 и 7 с соответствующими неподвижными магнитными системами 4 и 5 выполнено в виде мягкого подвеса 15 с возможностью упомянутого перемещения катушек относительно неподвижных магнитных систем 4 и 5 и основания 13.
В первом частном случае изготовления разработанного электромеханического модулятора его электромеханический блок 3, представленный на фиг.2, содержит неподвижное массивное основание 13, на котором жестко укреплены стандартные магнитные системы 4 и 5 электродинамических громкоговорителей, т.е. динамиков. В качестве первой и второй катушек 6 и 7 из токопроводящего провода использованы катушки, намотанные на алюминиевых каркасах. Жесткое и соосное соединение катушек 6 и 7 между собой, образующее подвижную часть 8 модулятора, достигается за счет крепления их на противоположных концах металлического стержня 14. Мягкий подвес 15, обеспечивающий соединение этих катушек с магнитными системами 4 и 5, изготовлен в виде двух мягких центрирующих шайб. В первом частном случае изготовления разработанного электромеханического модулятора в качестве датчика скорости 12 подвижной части 8 модулятора использована вторая катушка 7, токоведущий провод которой соединен с упомянутым инвертирующим входом интегратора 9, образуя цепь отрицательной обратной связи. Рабочее зеркало 16 интерферометра Майкельсона, формирующее одно из двух плеч интерферометра, прикрепляется к подвижной части 8 разработанного электромеханического модулятора. Возвратно-поступательное сканирование зеркала 16 с постоянной скоростью по закону меандра задается и поддерживается с помощью генератора 1 формы сигнала, блока электронного управления 2 и входящей в него цепи отрицательной обратной связи (см. фиг.1) с датчиком скорости 12.
Во втором частном случае изготовления разработанного электромеханического модулятора, представленном на фиг.3, в качестве датчика скорости 12 подвижной части 8 модулятора использован дополнительный компактный интерферометр 17 Майкельсона, одно из зеркал которого закреплено на подвижной части 8. Источником излучения для упомянутого компактного дополнительного интерферометра 17 служит диодный лазер 18 с достаточно узкой шириной спектра излучения, на выходе же упомянутого интерферометра 17 установлен фотоприемник 19, соединенный с преобразователем 20 частоты в напряжение, выход которого соединен с упомянутым инвертирующим входом интегратора 9, образуя цепь отрицательной обратной связи. При этом токоведущие провода первой и второй катушек 6 и 7 соединены с выходом усилителя мощности 11.
В примере конкретной реализации изготовлен электромеханический модулятор в соответствии с п.2 формулы изобретения, представленный на фиг.1 и 2, в котором в качестве генератора 1 формы сигнала служит кварцевый генератор, обеспечивающий сигнал в виде меандра. В качестве интегратора 9 использован операционный усилитель с интегрирующей цепочкой. Корректор АЧХ 10 изготовлен в виде нескольких операционных усилителей с интегрирующими и дифференцирующими цепочками. В качестве усилителя мощности 11 использована стандартная микросхема ОРА544Т. Электромеханический блок 3 выполнен из стандартных, выпускаемых отечественной промышленностью магнитных систем акустических динамиков.
Магнитные системы 4 и 5 жестко соединены с массивной основой 13. Катушки 6 и 7 для повышения жесткости подвижной части 8 изготовлены на алюминиевых каркасах с использованием эпоксидного клея. Таким образом, комплектующие, из которых изготовлен опытный образец разработанного электромеханического модулятора, фотография которого представлена на фиг.4, выпускаются отечественной промышленностью. Разработанный электромеханический модулятор разности длин плеч интерферометра может быть изготовлен серийно.
Разработанный электромеханический модулятор разности длин плеч интерферометра, представленный в общем случае выполнения на фиг.1, работает следующим образом.
Управляющее напряжение, представляющее собой разность между сигналами с генератора 1 и датчика скорости 12, необходимо подавать на силовую катушку 6 подвижной части 8 модулятора. Но если подавать это управляющее напряжение напрямую на катушку 6, то амплитудный и фазовый отклики подвижной части 8 не будут повторять амплитуду и фазу управляющей силы (управляющего напряжения). Это объясняется тем, что подвижная часть 8 в разработанной конструкции модулятора является классической механической колебательной системой, имеющей механический резонанс на низких (30-40 Гц) частотах, как показано на АЧХ на фиг.5. Резонансная кривая на фиг.5 (зависимость амплитуды А колебаний подвижной части 8 от частоты f воздействующей силы, т.е. частоты модуляции плеча интерферометра) описывается известной функцией

где f0 - резонансная частота, равная  (k - коэффициент упругости подвеса 15, М - масса подвижной части 8, γ - коэффициент затухания колебаний, F - амплитуда внешней силы, приложенной к силовой катушке 6, пропорциональная амплитуде управляющего напряжения. Следует отметить, что на частотах f больше резонансной частоты f0(f>f0), фаза отклика механической системы (подвижной части 8) A(f) приближается к 180°, что недопустимо с точки зрения устойчивости системы обратной связи, как это следует из критерия Найквиста (см., например, М.А.Айзерман. Теория автоматического регулирования двигателей. Уравнения движения и устойчивость. Государственное издательство технико-теоретической литературы. М., 1952 г.). Поэтому упомянутое управляющее напряжение (разность сигналов с генератора 1 и датчика скорости 12) сначала подается на корректор 10, состоящий из суммированных с соответствующими весами (коэффициенты «а», «в» и «с») линейной, дважды дифференцирующей и дифференцирующей цепочек, и только после этого через усилитель мощности 11 подается на катушку 6 подвижной части 8. Коэффициенты «а», «в» и «с» подобраны таким образом, что корректор 10 позволяет полностью скомпенсировать зависимость амплитуды A(f) [соотношение (1)] от частоты f, и в результате обеспечивается независимость амплитуды и фазы колебаний подвижной части 8 от частоты f управляющей силы (управляющего напряжения) до некоторого определенного предела fрез, обусловленного наличием у подвижной части 8 своих высокочастотных резонансов в связи с ее конечной жесткостью. Поэтому на реальной АЧХ подвижной части 8 модулятора появляются дополнительные высокочастотные (8-10 кГц) резонансные пики (см.фиг.6), которые уже ничем нельзя скомпенсировать (при изготовлении электромеханического модулятора предприняты специальные меры по увеличению жесткости подвижной части 8, а именно катушки 6 и 7 изготовлены на алюминиевых каркасах с использованием эпоксидного клея, в результате чего частота fрез первого высокочастотного паразитного резонанса повышается более чем в три раза по сравнению с использованием стандартных катушек на картонном каркасе). Таким образом, приходится ограничивать полосу обратной связи до этих высокочастотных паразитных резонансов (˜4 кГц): в цепь обратной связи вводится интегратор, обеспечивающий глубину обратной связи, равной единице, на частоте, меньшей частоты fрез первого высокочастотного паразитного резонанса. На низких частотах удалось реализовать глубину обратной связи в несколько тысяч (см. фиг.7, на которой приведена АЧХ глубины обратной связи). При этом следует отметить, что крепление подвижной части 8 к неподвижной основе 13 с помощью подвеса 15, например мягких центрирующих шайб (см. фиг.2), имеющих свои собственные резонансы, лежащие в области сотен герц, т.е. внутри полосы обратной связи, может испортить фазовую характеристику электромеханического модулятора и нарушить устойчивость обратной связи. Но при выбранном соотношении массы М подвижной части 8 и общей массы m мягких центрирующих шайб М ≫ m дополнительный поворот фазы колебаний подвижной части 8 за счет нелинейности подвеса 15, как установлено авторами, составляет не более 5-10 градусов. Это можно объяснить следующим образом. На фиг.8 схематично представлена механическая колебательная система, эквивалентная заявляемой конструкции. Груз М в этой колебательной системе эквивалентен подвижной части 8 модулятора, на которую воздействует сила F со стороны магнитной системы 4 (сила Ампера, действующая на проводник с током в постоянном магнитном поле). Груз m эквивалентен мягким центрирующим шайбам 15 (реально это распределенная масса с распределенной упругой связью). Механическая колебательная система из двух грузов М и m имеет два резонанса: низкочастотный, определяемый массой М подвижной части 8 и жесткостью подвеса 15, и высокочастотный, определяемый массой m и той же жесткостью подвеса 15. Как установлено авторами, низкочастотный резонанс появляется на частотах 30-40 Гц, а высокочастотный резонанс - на частотах 300-400 Гц. При решении задачи о нахождении амплитудно-частотной характеристики колебаний груза М в зависимости от частоты внешней силы F получается, что при М много больше m и при приемлемой добротности колебательной механической системы вклад упомянутого резонанса в амплитуду и фазу колебания большого груза М (подвижной части 8) незначителен. В нашем случае дополнительный поворот фазы колебания подвижной части 8 на частоте высокочастотного резонанса (300-400 Гц) оказался, как было отмечено выше, не больше 5-10 градусов, что совершенно неспособно нарушить устойчивость системы обратной связи. Таким образом, разработана конструкция электромеханического модулятора разности длин плеч интерферометра, обеспечивающая требуемую линейную зависимость амплитуды и фазы отклика подвижной части 8 модулятора от амплитуды и фазы управляющего напряжения при достаточно высокой частоте сканирования и при большом размахе колебаний, что позволяет решить поставленную задачу.
(k - коэффициент упругости подвеса 15, М - масса подвижной части 8, γ - коэффициент затухания колебаний, F - амплитуда внешней силы, приложенной к силовой катушке 6, пропорциональная амплитуде управляющего напряжения. Следует отметить, что на частотах f больше резонансной частоты f0(f>f0), фаза отклика механической системы (подвижной части 8) A(f) приближается к 180°, что недопустимо с точки зрения устойчивости системы обратной связи, как это следует из критерия Найквиста (см., например, М.А.Айзерман. Теория автоматического регулирования двигателей. Уравнения движения и устойчивость. Государственное издательство технико-теоретической литературы. М., 1952 г.). Поэтому упомянутое управляющее напряжение (разность сигналов с генератора 1 и датчика скорости 12) сначала подается на корректор 10, состоящий из суммированных с соответствующими весами (коэффициенты «а», «в» и «с») линейной, дважды дифференцирующей и дифференцирующей цепочек, и только после этого через усилитель мощности 11 подается на катушку 6 подвижной части 8. Коэффициенты «а», «в» и «с» подобраны таким образом, что корректор 10 позволяет полностью скомпенсировать зависимость амплитуды A(f) [соотношение (1)] от частоты f, и в результате обеспечивается независимость амплитуды и фазы колебаний подвижной части 8 от частоты f управляющей силы (управляющего напряжения) до некоторого определенного предела fрез, обусловленного наличием у подвижной части 8 своих высокочастотных резонансов в связи с ее конечной жесткостью. Поэтому на реальной АЧХ подвижной части 8 модулятора появляются дополнительные высокочастотные (8-10 кГц) резонансные пики (см.фиг.6), которые уже ничем нельзя скомпенсировать (при изготовлении электромеханического модулятора предприняты специальные меры по увеличению жесткости подвижной части 8, а именно катушки 6 и 7 изготовлены на алюминиевых каркасах с использованием эпоксидного клея, в результате чего частота fрез первого высокочастотного паразитного резонанса повышается более чем в три раза по сравнению с использованием стандартных катушек на картонном каркасе). Таким образом, приходится ограничивать полосу обратной связи до этих высокочастотных паразитных резонансов (˜4 кГц): в цепь обратной связи вводится интегратор, обеспечивающий глубину обратной связи, равной единице, на частоте, меньшей частоты fрез первого высокочастотного паразитного резонанса. На низких частотах удалось реализовать глубину обратной связи в несколько тысяч (см. фиг.7, на которой приведена АЧХ глубины обратной связи). При этом следует отметить, что крепление подвижной части 8 к неподвижной основе 13 с помощью подвеса 15, например мягких центрирующих шайб (см. фиг.2), имеющих свои собственные резонансы, лежащие в области сотен герц, т.е. внутри полосы обратной связи, может испортить фазовую характеристику электромеханического модулятора и нарушить устойчивость обратной связи. Но при выбранном соотношении массы М подвижной части 8 и общей массы m мягких центрирующих шайб М ≫ m дополнительный поворот фазы колебаний подвижной части 8 за счет нелинейности подвеса 15, как установлено авторами, составляет не более 5-10 градусов. Это можно объяснить следующим образом. На фиг.8 схематично представлена механическая колебательная система, эквивалентная заявляемой конструкции. Груз М в этой колебательной системе эквивалентен подвижной части 8 модулятора, на которую воздействует сила F со стороны магнитной системы 4 (сила Ампера, действующая на проводник с током в постоянном магнитном поле). Груз m эквивалентен мягким центрирующим шайбам 15 (реально это распределенная масса с распределенной упругой связью). Механическая колебательная система из двух грузов М и m имеет два резонанса: низкочастотный, определяемый массой М подвижной части 8 и жесткостью подвеса 15, и высокочастотный, определяемый массой m и той же жесткостью подвеса 15. Как установлено авторами, низкочастотный резонанс появляется на частотах 30-40 Гц, а высокочастотный резонанс - на частотах 300-400 Гц. При решении задачи о нахождении амплитудно-частотной характеристики колебаний груза М в зависимости от частоты внешней силы F получается, что при М много больше m и при приемлемой добротности колебательной механической системы вклад упомянутого резонанса в амплитуду и фазу колебания большого груза М (подвижной части 8) незначителен. В нашем случае дополнительный поворот фазы колебания подвижной части 8 на частоте высокочастотного резонанса (300-400 Гц) оказался, как было отмечено выше, не больше 5-10 градусов, что совершенно неспособно нарушить устойчивость системы обратной связи. Таким образом, разработана конструкция электромеханического модулятора разности длин плеч интерферометра, обеспечивающая требуемую линейную зависимость амплитуды и фазы отклика подвижной части 8 модулятора от амплитуды и фазы управляющего напряжения при достаточно высокой частоте сканирования и при большом размахе колебаний, что позволяет решить поставленную задачу.
Разработанный электромеханический модулятор разности длин плеч интерферометра имеет следующие технические характеристики:
- Частота модуляции - 10-50 Гц.
- Размах колебания 3-4 мм (или до 10 мм на базе динамиков большого размера).
- Длительность участка с постоянной скоростью - 90% от полупериода.
Вследствие большой базы крепления подвижного элемента 8 (расстояние между магнитными системами 4 и 5 составляет 6 см или больше) устройство обладает очень высокой угловой стабильностью оси, что важно для получения устойчивой интерференционной картины в интерферометрах с протяженными плечами. Испытание разработанного электромеханического модулятора разности длин плеч интерферометра показало его полное соответствие заявленным характеристикам и стабильность в работе.
Особенностью работы модулятора в первом частном случае его изготовления в соответствии с п.2 формулы (см. фиг.1, 2) является использование в качестве датчика скорости 12 подвижной части 8 модулятора электромеханического датчика скорости в виде второй катушки 7, установленной с возможностью перемещения относительно магнитной системы 5. При перемещении катушки 7 вместе с подвижной частью 8 электродвижущая сила (ЭДС), возбуждаемая в катушке 7, пропорциональна скорости V ее перемещения и является сигналом обратной связи. Этот сигнал подается на инвертирующий вход интегратора 9, замыкая цепь отрицательной обратной связи, которая минимизирует разность между сигналами с генератора 1 формы сигнала и датчика скорости 12 подвижной части 8 (в данном случае катушки 7). Вследствие этого в разработанной конструкции модулятора подвижная часть 8 перемещается (сканирует) со скоростью V, изменяющейся по закону, повторяющему закон меандра изменения управляющего напряжения с генератора 1. Точность поддержания скорости V в данной конструкции составляет 0,5% от ее амплитуды. Постоянство скорости V в обоих направлениях сканирования обеспечивает триангулярный закон движения рабочего зеркала 16 при модуляции разности длин плеч интерферометра.
Особенностью работы модулятора во втором частном случае его изготовления в соответствии с п.3 формулы является использование в качестве датчика скорости 12 подвижной части 8 оптического датчика в виде дополнительного компактного интерферометра 17 Майкельсона, одно из зеркал которого закреплено на подвижной части 8, а источником излучения служит диодный лазер 18 (см. фиг.3) с достаточно узкой шириной спектра излучения. А именно такой шириной спектра, при которой возможна интерференция двух лучей, имеющих разность хода, определяемую максимальным размахом сканирования подвижной части 8. В месте расположения фотоприемника 19 на выходе данного компактного интерферометра 17 при перемещении его зеркала вместе с подвижной частью 8 происходит изменение интерференционной картины со скоростью, пропорциональной скорости V сканирования. Это изменение интерференционной картины регистрируется фотоприемником 19. Следует отметить, что описанная выше оптическая часть датчика скорости обеспечивает точное и безынерционное отслеживание скорости V сканирования подвижной части 8. Далее интерференционный доплеровский сигнал с фотоприемника 19 преобразователем 20 превращается в сигнал, величина напряжения которого пропорциональна скорости V сканирования подвижной части 8. Данный сигнал с преобразователя 20 служит сигналом обратной связи и подается на вход интегратора 9, замыкая цепь отрицательной обратной связи, которая минимизирует разность между сигналами с генератора 1 формы сигнала и датчика скорости 12 подвижной части 8. На основе современной электронной базы создан преобразователь 20 частоты в напряжение, обладающий достаточно высокой точностью преобразования, что позволяет существенно повысить точность оптического датчика скорости по сравнению, например, с электромеханическим датчиком, и тем самым еще на 1-2 порядка повысить точность поддержания скорости V сканирования в соответствии с требуемым законом меандра.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ, ОПТОВОЛОКОННОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ДИАГНОСТИКИ БИОТКАНИ IN VIVO | 1998 |
|
RU2148378C1 |
| ОПТОВОЛОКОННЫЙ ИНТЕРФЕРОМЕТР И ОПТОВОЛОКОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1995 |
|
RU2100787C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ОБЪЕКТА И ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240502C1 |
| УСТРОЙСТВО ДЛЯ ИНТЕРФЕРОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ | 2004 |
|
RU2272991C2 |
| ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР (ВАРИАНТЫ) | 1999 |
|
RU2169347C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И УСТРОЙСТВО ДОСТАВКИ НИЗКОКОГЕРЕНТНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2002 |
|
RU2242710C2 |
| ИНТЕРФЕРОМЕТРИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2004 |
|
RU2273823C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА | 2003 |
|
RU2247938C1 |
| Волоконно-оптический датчик | 1984 |
|
SU1315797A1 |
| СПОСОБ И УСТРОЙСТВО СПЕКТРАЛЬНОЙ РЕФЛЕКТОМЕТРИИ | 2009 |
|
RU2399029C1 |
Изобретение относится к области приборостроения. В электромеханический модулятор, содержащий генератор формы сигнала, усилитель мощности и электромеханический блок, включающий в себя первую неподвижную магнитную систему и первую катушку из токоведущего провода, дополнительно введены интегратор и корректор амплитудно-частотной характеристики электромеханического блока, а в электромеханический блок введены вторая неподвижная магнитная система и вторая катушка из токоведущего провода, жестко и соосно соединенная с первой катушкой. Соединение же первой и второй катушек с неподвижным основанием выполнено в виде мягкого подвеса с возможностью перемещения первой и второй катушек, образующих подвижную часть модулятора, относительно неподвижных магнитных систем, при этом выход упомянутого генератора формы сигнала соединен с прямым входом интегратора, инвертирующий вход которого соединен с датчиком скорости подвижной части модулятора, выход интегратора соединен со входом корректора, к выходу которого присоединен вход упомянутого усилителя мощности. Технический результат - повышение точности модуляции. 2 з.п. ф-лы, 8 ил.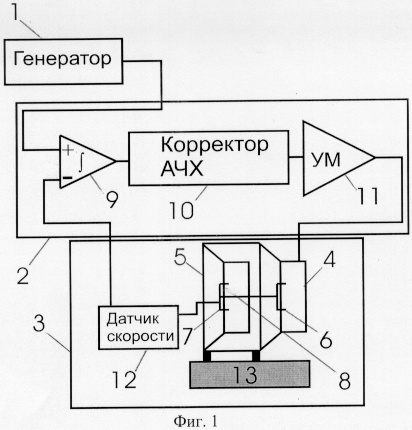
| Модулятор разности хода двух оптических пучков | 1988 |
|
SU1569789A1 |
| ОПТОВОЛОКОННЫЙ ИНТЕРФЕРОМЕТР И ОПТОВОЛОКОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1995 |
|
RU2100787C1 |
| МОДУЛЯТОР СВЕТА | 0 |
|
SU340995A1 |
| Устройство для модуляции светового потока | 1984 |
|
SU1320787A1 |

