Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к устройству и способу диспетчеризации в асинхронной системе мобильной связи множественного доступа с кодовым разделением каналов (МДКР, CDMA), обслуживающей расширенный выделенный транспортный канал восходящей линии связи (РВТКВ, EUDCH), и, в частности, к устройству и способу диспетчеризации узла В для пользовательского оборудования (ПО), находящегося в зоне мягкой передачи обслуживания.
Уровень техники
В целом скорость передачи данных на канале восходящей линии связи определяется ПО и ограничена сверху заданной возможной скоростью передачи данных. ПО сообщает верхний предел скорости передачи данных контроллеру радиосети (КРС, RNC). Это значит, что узел В не управляет скоростью передачи данных на существующем канале восходящей линии связи. Однако на расширенном выделенном транспортном канале восходящей линии связи (РВТКВ) узел В определяет возможность передачи данных восходящей линии связи и верхний предел возможной скорости передачи данных. Информация, полученная в результате определения, поступает в ПО в виде команды диспетчеризации. ПО определяет скорость передачи данных на РВТКВ в соответствии с командой диспетчеризации. В данном случае РВТКВ - это канал восходящей линии связи, обеспечивающий повышенную пропускную способность передачи для пакетов восходящей линии связи в асинхронной системе мобильной связи множественного доступа с кодовым разделением каналов (МДКР).
Сигналы восходящей линии связи, передаваемые разными ПО по таким каналам восходящей линии связи, не ортогональны друг другу по причине отсутствия синхронизации между ними. Поэтому сигналы восходящей линии связи создают помехи друг для друга. В результате увеличение количества сигналов восходящей линии связи, принимаемых узлом В, приводит к увеличению помехи для сигнала восходящей линии связи от отдельного ПО, тем самым снижая пропускную способность приема. Эту проблему можно решить за счет увеличения мощности передачи на отдельном канале восходящей линии связи. Однако увеличение мощности передачи на отдельном канале восходящей линии связи увеличивает помеху для сигналов восходящей линии связи, передаваемых по другим каналам восходящей линии связи, приводя к снижению пропускной способности приема. Таким образом, количество сигналов каналов восходящей линии связи, которое узел В может принимать с гарантированной пропускной способностью приема, ограничено. Это можно объяснить, используя отношение «превышения над тепловым шумом» (Rise-Over-Thermal) (ROT), определенное в уравнении (1):

В уравнении (1) I0 обозначает спектральную плотность мощности для всей ширины полосы пропускания приема узла В, a N0 обозначает спектральную плотность мощности для тепловых помех в узле В. Таким образом, ROT, определенное в уравнении (1), выражает радиоресурсы, которые узел В может выделить для услуги передачи пакетных данных через РВТКВ.
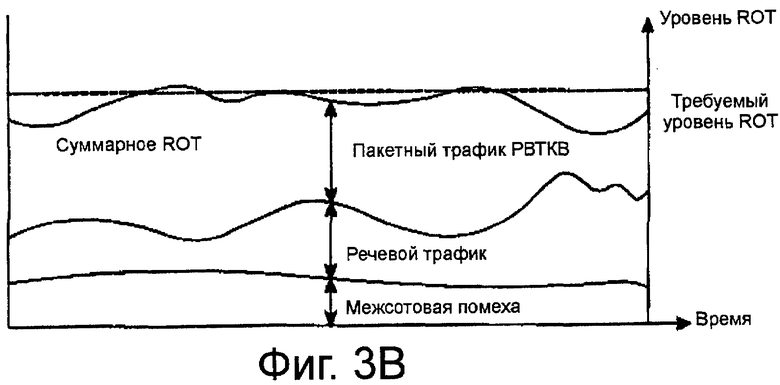
На фиг.3А и 3В показаны иллюстративные результаты измерения ROT приема в узле В. В частности, на фиг.3А показан график результатов измерения ROT в зависимости от времени, когда диспетчеризация узла В не обслуживается в асинхронной системе мобильной связи МДКР, поддерживающей РВТКВ, а на фиг.3В показан график результатов измерения ROT в зависимости от времени, когда диспетчеризация узла В обслуживается в асинхронной системе мобильной связи МДКР, поддерживающей РВТКВ.
Результаты измерения ROT, показанные на фиг.3А и 3В, можно выразить в виде суммы межсотовой помехи, речевого трафика и пакетного трафика, принимаемого по РВТКВ (далее именуемого пакетным трафиком РВТКВ).
Если диспетчеризация на пакетном трафике РВТКВ не осуществляется, то согласно фиг.3А одновременная пакетная передача на высокой скорости передачи данных с нескольких единиц ПО в течение определенного времени может привести к превышению измеренного ROT над требуемым ROT. В этом случае нельзя гарантировать пропускную способность приема для сигналов, принимаемых по каналам восходящей линии связи.
Если же диспетчеризация на пакетном трафике РВТКВ осуществляется, то согласно фиг.3В можно предотвратить одновременную пакетную передачу с нескольких единиц ПО на высокой скорости передачи данных в течение определенного времени. Поэтому узел В может всегда поддерживать измеренное ROT близко к запланированному ROT, гарантируя требуемую пропускную способность приема. Диспетчеризация, осуществляемая в узле В (ниже именуемая диспетчеризацией узла В), означает диспетчеризацию скоростей передачи данных в ПО, чтобы измеренное ROT не превышало требуемого ROT. Например, если узел В разрешает одному ПО передавать на высокой скорости передачи данных, он не разрешает другим ПО передавать на высокой скорости передачи данных.
На фиг.1 показана схема, иллюстрирующая диспетчеризацию узла В на основе услуги РВТКВ в асинхронной системе мобильной связи МДКР. Согласно фиг.1, узел В 110 является одним из активных узлов В, поддерживающих услугу передачи пакетных данных на основе РВТКВ, и единицы ПО 112, 114, 116 и 118 являются единицами ПО, которые передают пакеты данных в узел В 110 по своим каналам РВТКВ. Позиции 122, 124, 126 и 128 обозначают каналы РВТКВ, по которым ПО 112, 114, 116 и 118 передают пакеты данных на скоростях передачи данных, определенных путем диспетчеризации узла В.
В целом, если скорость передачи данных, используемая для ПО, увеличивается, то мощность приема узла В увеличивается в соответствии с сигналом, принимаемым от ПО. Если же скорость передачи данных, используемая для ПО, снижается, то мощность приема узла В снижается в соответствии с сигналом, принимаемым от ПО. В результате сигнал от ПО, использующего высокую скорость передачи данных, оказывает большое влияние на измеренное ROT узла В, а сигнал от ПО, использующего сравнительно низкую скорость передачи данных, оказывает незначительное влияние на измеренное ROT узла В. Таким образом, увеличение скорости передачи данных приводит к увеличению измеренного ROT, т.е. части, занятой радиоресурсами восходящей линии связи. Узел В осуществляет диспетчеризацию на пакетных данных РВТКВ с учетом соотношения между скоростями передачи данных и радиоресурсами, с одной стороны, и скорости передачи данных, запрашиваемой ПО, - с другой стороны.
Узел В 110 сообщает каждому ПО, доступна ли передача данных по РВТКВ на основании запрашиваемых скоростей передачи данных ПО или информации о состоянии канала или осуществляет операцию диспетчеризации для управления скоростями передачи данных на РВТКВ. Диспетчеризация узла В предусматривает, что более удаленному ПО назначается низкая скорость передачи данных, а более близко расположенному ПО - высокая скорость передачи данных, чтобы измеренное ROT не превышало требуемый уровень ROT, тем самым увеличивая пропускную способность системы в целом.
Согласно фиг.1, ПО 112, 114, 116 и 118 находятся на разных расстояниях от узла В 110. ПО 116 находится ближе всех к узлу В 110, а ПО 112 находится дальше всех от узла В 110. В этой связи согласно фиг.1 мощности передачи используемые единицами ПО 112, 114, 116 и 118, имеющие разные значения в зависимости от расстояния до узла В 110, представлены толщиной стрелок 122, 124, 126 и 128. Мощность передачи РВТКВ от ПО 116, ближайшего к узлу В 110, является самой низкой, что отражено толщиной стрелки 126, т.е. стрелка 126 самая тонкая, а мощность передачи РВТКВ от ПО 112 является самой высокой, что отражено толщиной стрелки 122, т.е. стрелка 122 самая толстая. Поэтому, чтобы добиться максимальной пропускной способности, в то же время поддерживая постоянное ROT и снижая межсотовую помеху с другими сотами, узел В 110 осуществляет диспетчеризацию таким образом, чтобы уровень мощности передачи был обратно пропорционален скорости передачи данных. Иными словами, диспетчеризация осуществляется таким образом, что наибольшая скорость передачи данных назначается ПО 116, имеющему наименьшую мощность передачи на восходящей линии связи по причине наименьшего расстояния до узла В 110, а наименьшая скорость передачи данных назначается ПО 112, имеющему наибольшую мощность передачи на восходящей линии связи по причине наибольшего расстояния до узла В 110.
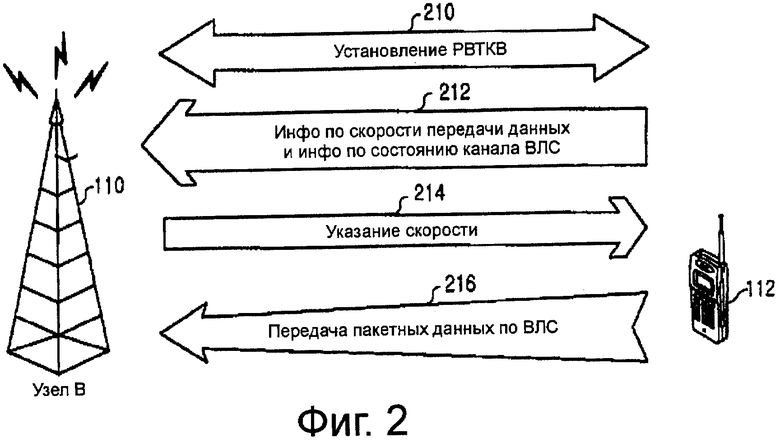
На фиг.2 изображена схема, иллюстрирующая процедуру обмена сигналами между узлом В и ПО для услуги РВТКВ в асинхронной системе мобильной связи МДКР. Предполагается, что обмен сигналами, показанный на фиг.2, соответствует обмену сигналами между узлом В 110 и ПО 112, показанному на фиг.1.
Согласно фиг.2, на этапе 210 осуществляется процедура установления РВТКВ для услуги РВТКВ между узлом В 110 и ПО 112. Процедура установления РВТКВ включает в себя передачу/прием сообщений по выделенному транспортному каналу. По завершении процедуры установления РВТКВ, на этапе 212 ПО 112 передает в узел В 110 информацию по требуемой скорости передачи данных и информацию, указывающую состояние канала восходящей линии связи. Информация, указывающая состояние канала восходящей линии связи, включает в себя мощность передачи и предельную мощность передачи на канале восходящей линии связи.
Получив информацию о мощности передачи на канале восходящей линии связи, узел В 110 может оценить состояние канала нисходящей линии связи, сравнив мощность передачи канала восходящей линии связи с его мощностью приема. Если мощность передачи незначительно отличается от мощности приема, то состояние канала нисходящей линии связи оценивается как хорошее, а если мощность передачи значительно отличается от мощности приема, то состояние канала нисходящей линии связи оценивается как плохое.
На основании предельной мощности передачи, передаваемой в качестве информации о состоянии канала восходящей линии связи, узел В 110 может оценить мощность передачи канала восходящей линии связи путем вычитания предельной мощности передачи из заранее известной максимально возможной мощности передачи ПО 112. Узел В 110 определяет максимальную скорость передачи данных, поддерживаемую РВТКВ, в зависимости от оценки состояния канала и информации о скорости передачи данных, запрашиваемой ПО 112. На этапе 214 узел В сообщает ПО 112 результат определения максимальной скорости передачи данных. Соответственно ПО 112 определяет скорость передачи данных для пакетов данных, которые нужно передавать по РВТКВ, в пределах максимальной скорости передачи данных, и на этапе 216 передает пакетные данные в узел В 110 на определенной им скорости передачи данных.
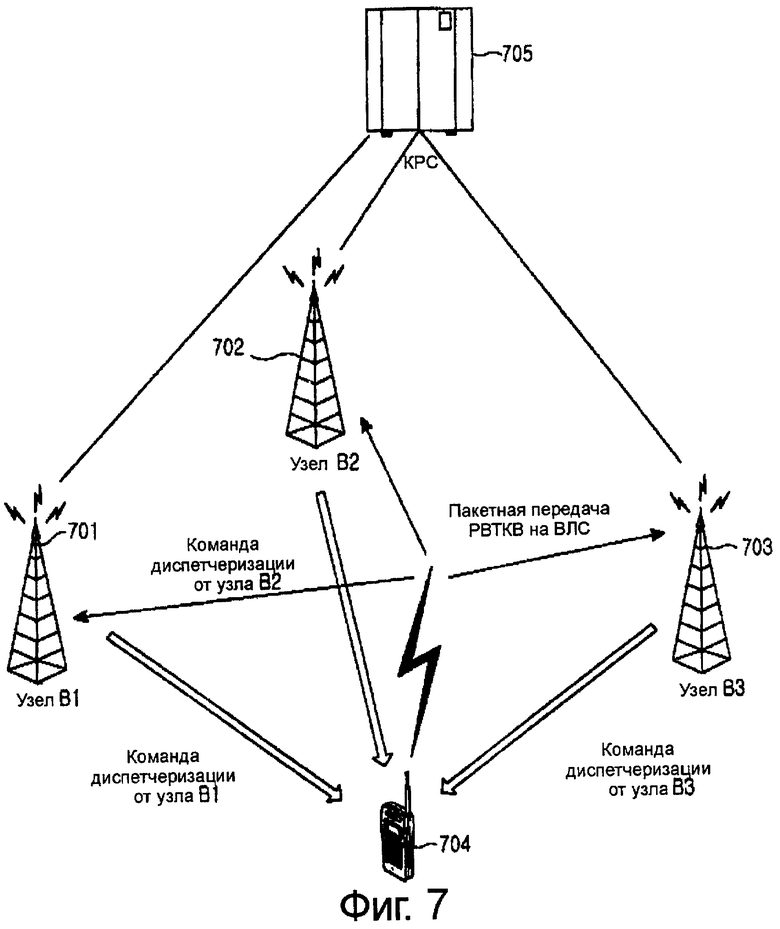
На фиг.7 изображена схема асинхронной системы мобильной связи МДКР, поддерживающей РВТКВ, где ПО находится в зоне мягкой передачи обслуживания (МПО, SHO). Согласно фиг.7, данные, передаваемые с ПО 704, находящегося в зоне мягкой передачи обслуживания, поступают в несколько активных узлов В 701, 702 и 703, связанных с зоной мягкой передачи обслуживания. Из активных узлов В 701, 702 и 703 узел В, которому удалось без ошибок демодулировать данные, принятые от ПО 704, передает демодулированные данные в КРС 705. Таким образом, КРС 705 принимает одни и те же данные через несколько узлов В, получая коэффициент усиления за счет разнесения с макроразделением. Такой режим работы в состоянии мягкой передачи обслуживания широко используется в современных системах беспроводной связи и с тем же успехом применим к услуге РВТКВ.
В случае применения такого режима работы в зоне мягкой передачи обслуживания к услуге РВТКВ каждый из активных узлов В 701, 702 и 703 принимает пакетные данные РВТКВ, переданные с ПО 704. Если активным узлам В 701, 702 и 703 удается принять пакетные данные РВТКВ без ошибок, они могут передать полученные данные в КРС 705. КРС 705, поскольку он принимает одни и те же данные через несколько узлов В, как указано выше, может обеспечивать требуемую пропускную способность приема пакетных данных РВТКВ, в то же время поддерживая по возможности низкую мощность передачи на каналах восходящей линии связи.
Чтобы несколько активных узлов В могли принимать пакетные данные РВТКВ, согласно описанному выше, каждый из активных узлов В должен осуществлять операцию диспетчеризации с учетом скорости передачи данных, запрашиваемой ПО, и состояния канала восходящей линии связи. Однако поскольку ни один из активных узлов В не может знать ROT других активных узлов В, активные узлы В 701, 702 и 703 могут передавать в ПО 704 разные команды диспетчеризации. Например, узел В 701 разрешает ПО 704 передавать данные на 100 кбит/с, тогда как узлы В 702 и 703 не могут гарантировать пропускную способность приема, если ПО 704 будет передавать на скорости 100 кбит/с. Поэтому необходим способ диспетчеризации, повышающий пропускную способность системы РВТКВ, когда ПО принимает разные команды диспетчеризации от нескольких узлов В.
Сущность изобретения
Задачей настоящего изобретения является создание устройства и способа эффективного осуществления услуги расширенного выделенного транспортного канала восходящей линии связи (РВТКВ) в ПО в соответствии с командами диспетчеризации, полученными от нескольких активных узлов В.
Другой задачей настоящего изобретения является создание устройства и способа диспетчеризации эффективного осуществления диспетчеризации на основе РВТКВ под управлением узла В, когда ПО, находящееся в зоне мягкой передачи обслуживания, принимает разные команды диспетчеризации от нескольких активных узлов В.
Еще одной задачей настоящего изобретения является создание устройства и способа диспетчеризации скорости передачи данных, которую ПО, находящееся в зоне мягкой передачи обслуживания, должно использовать для РВТКВ.
Еще одной задачей настоящего изобретения является создание устройства и способа предварительного определения параметров, необходимых для осуществления диспетчеризации в ПО, находящемся в зоне мягкой передачи обслуживания, и для сообщения ПО результатов определения параметров.
Еще одной задачей настоящего изобретения является создание устройства и способа эффективного осуществления диспетчеризации узла В, когда ПО, находящееся в зоне мягкой передачи обслуживания, принимает разные команды диспетчеризации от активных узлов В для повышения пропускной способности системы РВТКВ.
Первый аспект настоящего изобретения предусматривает способ передачи пакетных данных с пользовательского оборудования (ПО) в зоне мягкой передачи обслуживания в узлы В в системе мобильной связи множественного доступа с кодовым разделением каналов (МДКР), содержащей несколько узлов В, находящихся по соседству друг с другом, и ПО, находящееся в зоне мягкой передачи обслуживания, занятой узлами В. Способ заключается в том, что принимают команды диспетчеризации, переданные с узлов В; и определяют управляющую информацию диспетчеризации, объединяя команды диспетчеризации на основании весовых коэффициентов, предварительно определенных для каждой команды диспетчеризации в отдельности, и передают пакетные данные в узлы В в соответствии с управляющей информацией диспетчеризации.
Второй аспект настоящего изобретения предусматривает устройство для передачи пакетных данных с пользовательского оборудования (ПО) в зоне мягкой передачи обслуживания в узлы В в системе мобильной связи множественного доступа с кодовым разделением каналов (МДКР), содержащей несколько узлов В, находящихся по соседству друг с другом, и ПО, находящееся в зоне мягкой передачи обслуживания, занятой узлами В. Устройство содержит объединитель команд диспетчеризации для приема команд диспетчеризации, переданных с узлов В, и для определения управляющей информации диспетчеризации путем объединения команд диспетчеризации на основании весовых коэффициентов, предварительно определенных для каждой команды диспетчеризации в отдельности; передатчик пакетов для передачи пакетных данных в узлы В в соответствии с управляющей информацией диспетчеризации.
Третий аспект настоящего изобретения предусматривает способ применения весового коэффициента к каждой соте посредством контроллера радиосети (КРС), который управляет сотами, позволяющий пользовательскому оборудованию (ПО), находящемуся в зоне мягкой передачи обслуживания, передавать пакетные данные в соответствии с командами диспетчеризации от сот с учетом весовых коэффициентов, в системе мобильной связи множественного доступа с кодовым разделением каналов (МДКР), содержащей несколько сот, соседствующих друг с другом, и ПО, находящееся в зоне мягкой передачи обслуживания, занятой сотами. Способ заключается в том, что вычисляют весовые коэффициенты, которые обратно пропорциональны радиусу ri каждой из сот и прямо пропорциональны конкретному значению k; и передают весовые коэффициенты, вычисленные для каждой соты в отдельности, в ПО посредством сообщения управления радиоресурсами (УРР).
Четвертый аспект настоящего изобретения предусматривает способ применения весового коэффициента к каждой соте посредством контроллера радиосети (КРС), который управляет сотами, позволяющий пользовательскому оборудованию (ПО), находящемуся в зоне мягкой передачи обслуживания, передавать пакетные данные в соответствии с командами диспетчеризации от сот с учетом весовых коэффициентов, в системе мобильной связи множественного доступа с кодовым разделением каналов (МДКР), содержащей несколько сот, соседствующих друг с другом, и ПО, находящееся в зоне мягкой передачи обслуживания, занятой сотами. Способ заключается в том, что принимают от ПО потери γi на трассе, которые определяют на основании уровня общего пилот-сигнала, измеренного для каждой соты; вычисляют весовые коэффициенты, которые обратно пропорциональны потерям γi на трассе для каждой соты и прямо пропорциональны конкретному значению k; и передают весовые коэффициенты, вычисленные для каждой соты в отдельности, в ПО посредством сообщений УРР.
Краткое описание чертежей
Вышеперечисленные и другие задачи, признаки и преимущества настоящего изобретения поясняются в нижеследующем подробном описании, приведенном совместно с прилагаемыми чертежами, на которых:
фиг.1 - схема диспетчеризации узла В на основе услуги расширенного выделенного транспортного канала восходящей линии связи (РВТКВ) в асинхронной системе мобильной связи МДКР;
фиг.2 - схема процедуры обмена сигналами между узлом В и ПО для услуги РВТКВ в асинхронной системе мобильной связи МДКР;
фиг.3А - график изменения измеренного ROT (превышения над тепловым шумом), когда диспетчеризация узла В не предусмотрена в асинхронной системе мобильной связи МДКР, поддерживающей РВТКВ;
фиг.3В - график изменения измеренного ROT (превышения над тепловым шумом), когда диспетчеризация узла В предусмотрена в асинхронной системе мобильной связи МДКР, поддерживающей РВТКВ;
фиг.4 - блок-схема структуры передающего устройства для ПО в асинхронной системе мобильной связи МДКР, поддерживающей РВТКВ;
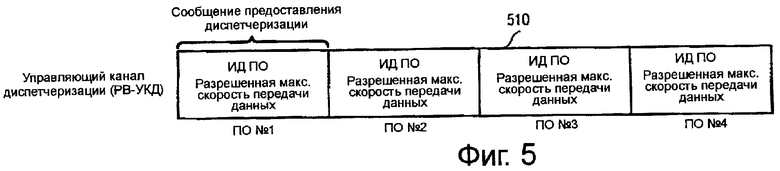
фиг.5 - схема иллюстративного управляющего сообщения диспечеризации для передачи команды диспетчеризации РВТКВ;
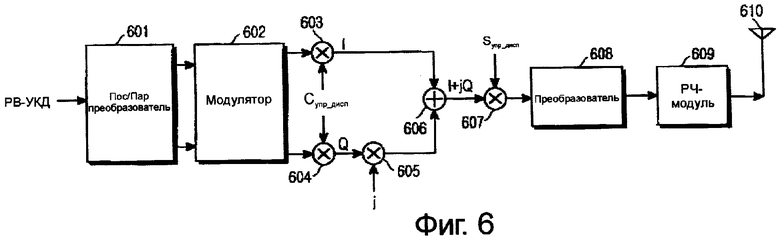
фиг.6 - блок-схема передающего устройства для узла В в асинхронной системе мобильной связи МДКР, поддерживающей РВТКВ;
фиг.7 - схема асинхронной системы мобильной связи МДКР, поддерживающей РВТКВ, в которой ПО находится в зоне мягкой передачи обслуживания;
фиг.8 - блок-схема дополнительно необходимой структуры в передающем устройстве для ПО, поддерживающем РВТКВ, согласно варианту осуществления настоящего изобретения;
фиг.9 - блок-схема иллюстративного объединителя команд диспетчеризации, показанного на фиг.8;
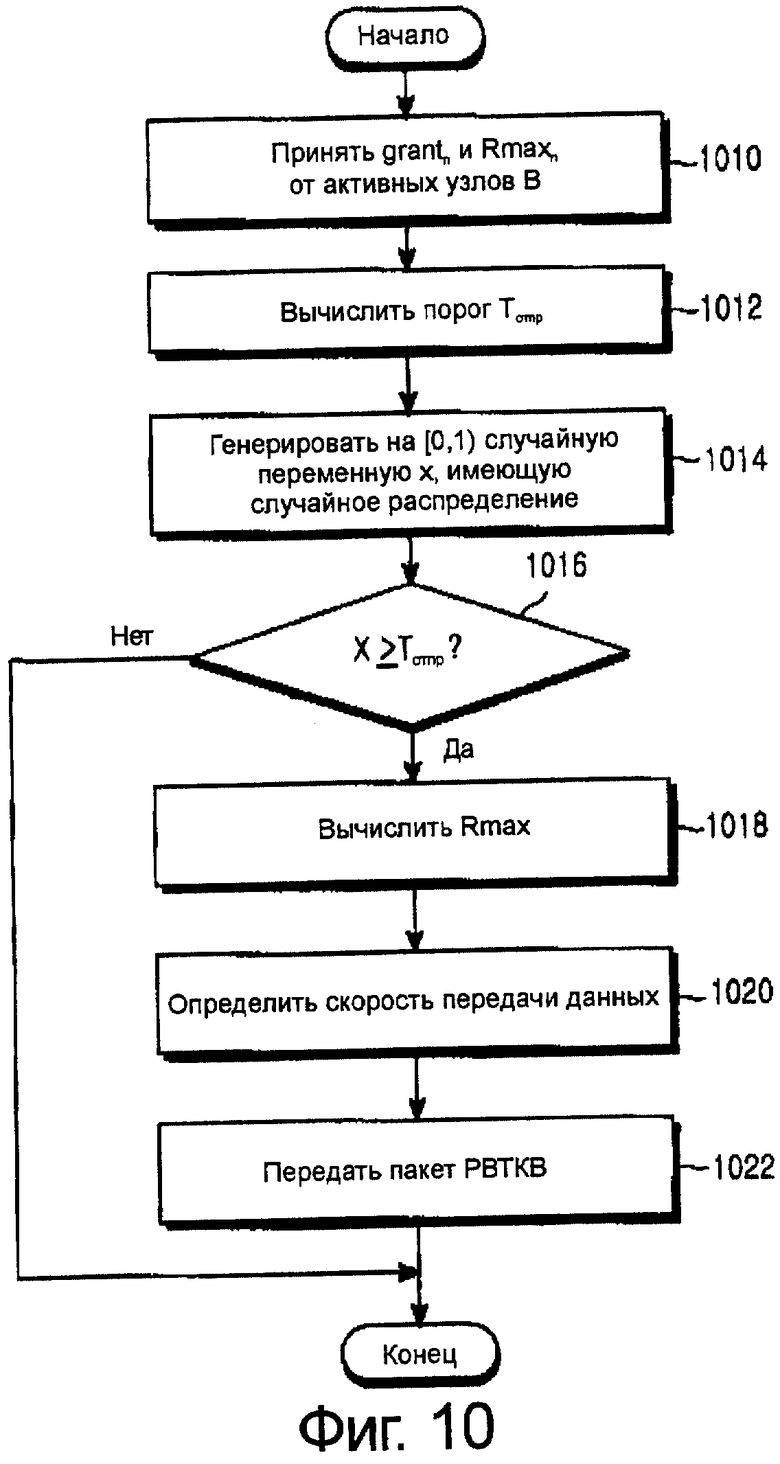
фиг.10 - логическая блок-схема процедуры управления, осуществляемой объединителем команд диспетчеризации, показанным на фиг.9;
фиг.11 - блок-схема другого иллюстративного объединителя команд диспетчеризации, показанного на фиг.8;
фиг.12 - логическая блок-схема процедуры управления, осуществляемой объединителем команд диспетчеризации, показанным на фиг.11;
фиг.13 - блок-схема еще одного иллюстративного объединителя команд диспетчеризации, показанного на фиг.8;
фиг.14 - логическая блок-схема процедуры управления, осуществляемой объединителем команд диспетчеризации, показанным на фиг.13.
Подробное описание предпочтительного варианта осуществления
Предпочтительные варианты осуществления настоящего изобретения подробно описаны ниже со ссылкой на прилагаемые чертежи. На чертежах одинаковые или сходные элементы обозначены одинаковыми позициями, даже если они указаны на разных чертежах. В нижеследующем описании подробное описание используемых здесь известных функций и конфигураций для ясности опущено.
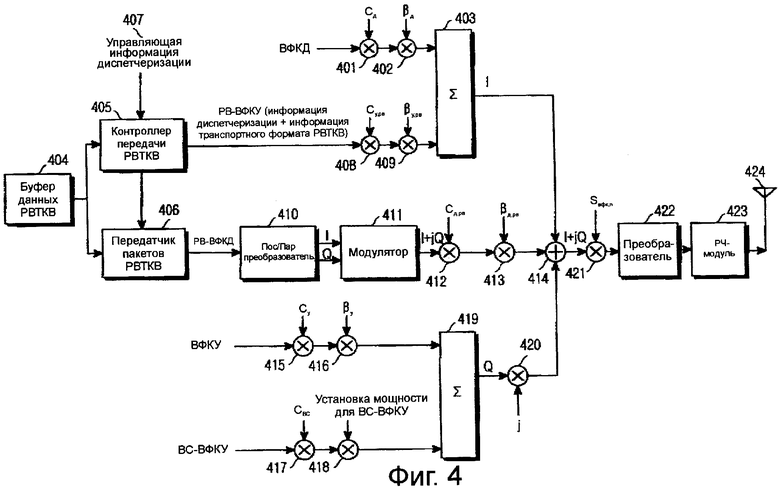
На фиг.4 изображена блок-схема передающего устройства для ПО в асинхронной системе мобильной связи МДКР, поддерживающей РВТКВ.
Физический канал восходящей линии связи, используемый в системе, изображенной на фиг.1, содержит выделенный физический канал данных (ВФКД, DPDCH), выделенный физический канал управления (ВФКУ, DPCCH), высокоскоростной выделенный физический канал управления (ВС-ВФКУ, HS-DPCCH) и РВТКВ. ВС-ВФКУ - это выделенный физический канал управления для услуги высокоскоростного пакетного доступа на нисходящей линии связи (ВСПДН, HSDPA). РВТКВ - это канал для расширенной услуги передачи пакетов данных по восходящей линии связи (услуги РВТКВ), состоящий из расширенного выделенного физического канала управления восходящей линии связи (РВ-ВФКУ, EU-DPCCH) и расширенного выделенного физического канала данных восходящей линии связи (РВ-ВФКД, EU-DPDCH). РВ-ВФКУ - это выделенный физический канал управления для услуги РВТКВ, по которому осуществляется передача информации диспетчеризации, например, о скорости передачи данных, необходимой для ПО, и информации (мощности передачи восходящей линии связи или предельной мощности передачи восходящей линии связи), необходимой для узла В для оценки состояния канала восходящей линии связи. Кроме того, по РВ-ВФКУ осуществляется передача информации транспортного формата пакетных данных РВТКВ, передаваемых по РВ-ВФКД. РВ-ВФКД - это выделенный физический канал данных для услуги РВТКВ, по которому осуществляется передача пакетных данных на скорости передачи данных, определенной в соответствии с командой диспетчеризации от узла В.
Традиционно ВФКД поддерживает только схему модуляции ДФМн (двоичной фазовой манипуляции). Однако РВ-ВФКД может, помимо ДФМн, использовать в качестве схемы модуляции КФМн (квадратурную фазовую манипуляцию) и 8ФМн (восьмеричную фазовую манипуляцию) для повышения скорости передачи данных без увеличения количества расширяющих кодов, которые можно передавать одновременно.
Согласно фиг.4, контроллер 405 передачи (ПЕР) РВТКВ определяет скорость передачи данных Rзапр, запрашиваемую ПО, и транспортный формат пакетных данных РВТКВ и передает определенную информацию в узел В по РВ-ВФКУ. Rзапр можно определить из уравнения (2) с учетом количества (объема) Lдан данных, буферизованных в данный момент в буфере 404 данных РВТКВ и допустимого времени задержки передачи Тзад.
Rзапр=1дан/Тзад (2)
В случае непрерывной передачи пакета данных на Rзапр, вычисленной из уравнения (2), данные, буферизованные в данный момент в буфере 404 данных РВТКВ, можно передавать в течение допустимого времени задержки передачи Тзад. Транспортный формат пакетных данных РВТКВ можно определить так, чтобы пакет данных РВТКВ можно было передавать на максимальной скорости передачи данных, разрешенной в соответствии с управляющей информацией 407 диспетчеризации, принятой от узла В. Вычисленная Rзапр поступает на передатчик 406 пакетов РВТКВ. Передатчик 406 пакетов РВТКВ считывает объем данных, указанный в транспортном формате пакетных данных РВТКВ, из буфера 404 данных РВТКВ, осуществляет канальное кодирование и модуляцию считанных данных в соответствии со схемой модуляции и скоростью канального кодирования, указанных в транспортном формате пакетных данных РВТКВ, и передает модулированные данные в узел В по РВ-ВФКД.
Rзапр, вычисленная контроллером 405 передачи РВТКВ, поступает на умножитель 408 в качестве сигнала РВ-ВФКУ, и умножитель 408 расширяет по спектру сигнал РВ-ВФКУ кодом OVSF (ортогональный код с переменным коэффициентом расширения) Су,рв на чиповой скорости (скорости передачи элементов данных). Сигнал РВ-ВФКУ, расширенный по спектру на чиповой скорости, поступает в умножитель 409, который умножает расширенный по спектру сигнал РВ-ВФКУ на канальный коэффициент усиления βу,рв, и его выходной сигнал поступает в сумматор 403.
Сигнал ВФКД поступает в умножитель 401, и умножитель 401 умножает сигнал ВФКД на код Сд OVSF на чиповой скорости. Сигнал ВФКД, расширенный по спектру на чиповой скорости, поступает в умножитель 402, и умножитель 402 умножает расширенный по спектру сигнал ВФКД на канальный коэффициент усиления βд и выдает выходной сигнал в сумматор 403. Сумматор 403 суммирует сигнал ВФКД от умножителя 402 и сигнал РВ-ВФКУ от умножителя 409 и назначает свой выходной сигнал синфазному (I) каналу.
При использовании ДФМн символы РВ-ВФКД из передатчика 406 пакетов РВТКВ назначаются каналу I, поскольку они имеют действительное значение. Однако при использовании КФМн или 8ФМн символы РВ-ВФКД выражаются в виде I+jQ, поскольку они передаются как комплексные символы.
Согласно фиг.4, предполагается передача символов РВ-ВФКД в виде комплексных символов. Поэтому символы РВ-ВФКД, поступающие от передатчика 406 пакетов РВТКВ, преобразуются в два потока символов, а именно потоки символов I и Q, посредством последовательно-параллельного преобразователя (Пос/Пар) 410, после чего модулируются в комплексные модулированные символы по схеме КФМн или 8ФМн посредством модулятора 411. Поток комплексных модулированных символов расширяется по спектру кодом Сд,рв OVSF на чиповой скорости в умножителе 412, а затем умножается на канальный коэффициент усиления βд,рв в умножителе 413.
Сигнал ВФКУ поступает в умножитель 415, который расширяет по спектру сигнал ВФКУ кодом Су OVSF на чиповой скорости. Сигнал ВФКУ, расширенный по спектру на чиповой скорости, поступает в умножитель 416, который умножает расширенный по спектру сигнал ВФКУ на канальный коэффициент усиления βу и выдает выходной сигнал в сумматор 419.
Сигнал ВС-ВФКУ поступает в умножитель 417, который расширяет по спектру сигнал ВС-ВФКУ кодом Свс OVSF на чиповой скорости. Сигнал ВС-ВФКУ, расширенный по спектру на чиповой скорости, поступает в умножитель 418, который умножает расширенный по спектру сигнал ВС-ВФКУ на значение установки мощности для ВС-ВФКУ и выдает выходной сигнал в сумматор 419. Сумматор 419 суммирует сигнал ВФКУ от умножителя 416 и сигнал ВС-ВФКУ от умножителя 418. Умножитель 420 умножает суммированный сигнал на j, в результате чего суммированный сигнал преобразуется в мнимое значение и назначается квадратурному каналу (Q).
Действительный выходной сигнал сумматора 403, комплексный выходной сигнал умножителя 413 и мнимый выходной сигнал умножителя 420 суммируются в сумматоре 414, образуя единый поток комплексных символов. Умножитель 421 скремблирует комплексные символы по одному скремблирующим кодом Sвфк,n. Преобразователь 422 преобразует поток скремблированных комплексных символов в импульсный сигнал. Импульсные сигналы, полученные преобразованием, модулируются в радиочастотный (РЧ) сигнал в РЧ-модуле 423 для передачи в узел В через антенну.
На фиг.5 изображена схема иллюстративного управляющего сообщения диспетчеризации для передачи команды диспетчеризации РВТКВ. Согласно фиг.5, по управляющему каналу диспетчеризации (РВ-УКД, EU-SCHCCH) 510 осуществляется передача сообщений предоставления диспетчеризации в ПО. Сообщение предоставления диспетчеризации содержит управляющую информацию диспетчеризации для ПО, допускающих диспетчеризацию. По РВ-УКД несколько ПО получают информацию о том, разрешена ли передача пакетных данных РВТКВ, с использованием одного кода OVSF, и управляющая информация диспетчеризации содержит разрешенную максимальную скорость передачи данных. Управляющую информацию диспетчеризации для каждого ПО можно отличать за счет передачи идентификатора (ИД) ПО для идентификации ПО совместно с сообщением предоставления диспетчеризации. На фиг.6 изображена блок-схема структуры передающего устройства для узла В в асинхронной системе мобильной связи МДКР, поддерживающей РВТКВ. Согласно фиг.6, данные РВ-УКД, показанные на фиг.5, преобразуются в два потока данных последовательно-параллельным преобразователем (Пос/Пар) 601, после чего поступают в модулятор 602. Модулятор 602 раздельно модулирует два потока данных согласно заданной схеме модуляции и выдает поток модулированных данных, соответствующий каналу I, и поток модулированных данных, соответствующий каналу Q. Например, в качестве заданной схемы модуляции можно использовать КФМн.
Умножитель 603 расширяет по спектру поток модулированных данных, соответствующий каналу I, кодом Супр_дисп OVSF на чиповой скорости. Поток модулированных данных, соответствующий каналу Q, расширяется по спектру кодом Супр_дисп OVSF на чиповой скорости в умножителе 604, после чего умножается на j в умножителе 605, генерирующем поток мнимых модулированных данных. Сумматор 605 суммирует два потока модулированных данных, выдаваемых умножителем 603 и умножителем 604, генерируя единый поток комплексных модулированных данных. Умножитель 607 скремблирует поток комплексных модулированных данных скремблирующим кодом Sупр_дисп. Преобразователь 608 преобразует поток скремблированных комплексных символов в импульсные сигналы. Импульсные сигналы, полученные преобразованием, модулируются в РЧ-сигнал в РЧ-модуле 609 для передачи в ПО через антенну 610.
Согласно фиг.7, если ПО находится в зоне мягкой передачи обслуживания и каждый из активных узлов В осуществляет операцию диспетчеризации, при этом ПО может принимать от активных узлов В разные команды диспетчеризации. Ниже описан возможный пример случая, показанного на фиг.7.
Узел В № 1 701 разрешает передавать пакетные данные на максимальной скорости передачи данных 100 кбит/с.
Узел В № 2 702 запрещает передачу пакетных данных.
Узел В № 3 703 разрешает передавать пакетные данные на максимальной скорости передачи данных 50 кбит/с.
В этом примере ПО, получив несколько команд диспетчеризации, может работать в одном из двух режимах, которые будем называть активной диспетчеризацией и негативной диспетчеризацией. Ниже приведено их подробное описание.
Активная диспетчеризация: ПО определяет скорость передачи данных, соответствующую наиболее выгодной команде диспетчеризации, т.е. команде, позволяющей передавать наибольший объем пакетных данных, и передает пакетные данные на этой скорости передачи данных. Таким образом, в вышеприведенном примере ПО передает пакетные данные на скорости передачи данных, равной 100 кбит/с, в соответствии с командой диспетчеризации, полученной от узла В № 1 701.
Негативная диспетчеризация: ПО определяет скорость передачи данных, соответствующую наиболее невыгодной команде диспетчеризации из совокупности команд диспетчеризации, и передает данные на этой скорости передачи данных.
В этом примере ПО не передает пакетных данных в соответствии с командой от узла В № 2 702. Узел В № 2 702, назначая ПО конкретную скорость передачи данных, запрещает передачу пакетных данных, поскольку измеренное ROT превышает требуемое ROT или допустимое ROT. Таким образом, если бы ПО передавало пакетные данные, то не только нельзя было бы гарантировать пропускную способность приема пакетных данных, но также снижалась бы пропускная способность приема пакетных данных, принимаемых в данный момент от других ПО. Во избежание значительного снижения пропускной способности в любом активном узле В по причине возрастания измеренного ROT вследствие передачи пакетных данных с ПО ПО определяет скорость передачи данных, обеспечивающую минимальный объем пакетных данных (т.е. наиболее невыгодную команду диспетчеризации) и передает пакетные данные на этой скорости передачи данных.
Активная диспетчеризация может повышать использование ROT, которое является ресурсом восходящей линии связи, поскольку передача пакетных данных всегда осуществляется согласно наиболее выгодной команде диспетчеризации. Однако пропускная способность приема может ухудшаться вследствие увеличения ROT над требуемым (ожидаемым) значением в узле В. Однако негативная диспетчеризация может препятствовать снижению пропускной способности приема, поскольку ПО передает пакетные данные согласно наиболее невыгодной команде диспетчеризации, в результате чего ROT всегда оказывается ниже значения, запланированного в узле В. Тем не менее, негативная диспетчеризация не позволяет в достаточной степени использовать ROT, которое является ограниченным ресурсом канала восходящей линии связи, тем самым растрачивая ресурс ROT.
Настоящее изобретение обеспечивает устройство и способ объединения разных команд диспетчеризации, поступающих от нескольких узлов В, когда ПО находится в зоне мягкой передачи обслуживания, чтобы решить противоречие между активной диспетчеризацией и негативной диспетчеризацией и тем самым увеличить пропускную способность системы РВТКВ.
На фиг.8 изображена блок-схема дополнительно необходимой структуры в передающем устройстве для ПО, поддерживающем РВТКВ, согласно варианту осуществления настоящего изобретения. Поскольку в варианте осуществления настоящего изобретения можно с тем же успехом применять модуляцию и расширение по спектру кодом OVSF в передающем устройстве для ПО, показанном на фиг.4, соответствующие компоненты на фиг.8 не показаны.
Согласно фиг.8, когда ПО находится в зоне мягкой передачи обслуживания, образованной N активными узлами В, команды диспетчеризации от активных узлов В поступают в объединитель 801 команд диспетчеризации. Объединитель 801 команд диспетчеризации применяет разные весовые коэффициенты wn к командам диспетчеризации от активных узлов В, объединяет команды диспетчеризации, уровни которых отрегулированы весовыми коэффициентами wn, и выводит объединенную управляющую информацию диспетчеризации. Весовые коэффициенты wn присваиваются каждому активному узлу В отдельности. Весовой коэффициент wn (n=1, 2,..., N) для каждого активного узла В может определять КРС с учетом физического местоположения каждого активного узла В и размера его соты в зоне мягкой передачи обслуживания, в которой находится ПО.
Например, когда конкретный узел В № m имеет соту меньшего размера, чем другие активные узлы В, приращение ROT приема в узле В № m по причине передачи пакетных данных РВТКВ может быть больше, чем приращения ROT приема в других узлах В. В этом случае, поскольку общее снижение пропускной способности может увеличиться в узле В № m из-за непрогнозируемой пакетной передачи РВТКВ, КРС может применить увеличенный весовой коэффициент к управляющей информации диспетчеризации узла В № m.
Ниже описан пример вычисления весовых коэффициентов в соответствии с размером соты согласно вышеупомянутому.
Когда ПО связывается с N активными сотами, имеющими радиус соты ri (i=1, 2,..., N) в зоне мягкой передачи обслуживания, весовой коэффициент wi каждой активной соты можно вычислять как wi=k/ri, чтобы применять увеличенный весовой коэффициент к команде диспетчеризации от соты, имеющей меньший размер соты, согласно описанному выше. В данном случае k определено так, что

В другом примере вычисления весового коэффициента для каждой активной соты ПО измеряет уровень сигнала общего пилот-сигнала от каждой активной соты и сообщает измеренный уровень сигнала или потери на трассе в КРС. КРС может определять весовой коэффициент wi для каждой активной соты как wi=k/γi, используя оценку потерь на трассе γi для каждой активной соты. Снижение потерь на трассе приводит к увеличению ROT приема в соте по причине пакетных данных РВТКВ, переданных с ПО. Иными словами, снижение пропускной способности приема, происходящее, когда ROT превышает значение, прогнозируемое диспетчером узла В, вследствие непрогнозируемой передачи пакетных данных РВТКВ, увеличено для соты, имеющей меньшие потери на трассе. Поэтому чтобы минимизировать снижение пропускной способности приема, весовой коэффициент для каждой активной соты определяется так, чтобы он был обратно пропорционален потерям на трассе, как описано выше. Таким образом, k задают так, чтобы
Управляющая информация диспетчеризации поступает в контроллер 802 передачи РВТКВ. Контроллер 802 передачи РВТКВ определяет транспортный формат РВТКВ на основании текущего состояния буфера 803 данных РВТКВ, в котором временно хранятся данные РВТКВ, и управляющей информации диспетчеризации и передает определенную информацию в активные узлы В по ВС-ВФКУ.
Кроме того, транспортный формат РВТКВ поступает в передатчик 804 пакетов РВТКВ. Передатчик 804 пакетов РВТКВ считывает данные РВТКВ, хранящиеся в буфере 803 данных РВТКВ, переконфигурирует данные РВТКВ согласно транспортному формату РВТКВ и затем передает переконфигурированные данные РВТКВ в активные узлы В по ВС-ВФКД.
Предпочтительные варианты осуществления настоящего изобретения описаны ниже более подробно со ссылками на прилагаемые чертежи. Описание вариантов осуществления относятся к объединителю 801 команд диспетчеризации, показанному на фиг.8.
Первый вариант осуществления
На фиг.9 показана блок-схема иллюстративного объединителя команд диспетчеризации, показанного на фиг.8, а на фиг.10 показана логическая блок-схема процедуры управления, осуществляемой объединителем команд диспетчеризации, показанным на фиг.9. Таким образом, фиг.9 и 10 иллюстрируют устройство и способ, применяемые в ПО в соответствии с вариантом осуществления, применимым, когда узел В передает в ПО в качестве управляющей информации диспетчеризации допустимость пакетной передачи РВТКВ и разрешенную максимальную скорость передачи данных. Допустимость пакетной передачи РВТКВ можно заменить информацией, указывающей, передано ли на соответствующее ПО сообщение предоставления диспетчеризации. Таким образом, если на соответствующе ПО передано сообщение предоставления диспетчеризации, то ПО определяет, что пакетная передача РВТКВ разрешена. В противном случае ПО определяет, что пакетная передача РВТКВ не разрешена.
На фиг.9 параметр grantn - это значение предоставления диспетчеризации, указывающее, передал ли узел В № n на соответствующее ПО сообщение предоставления диспетчеризации. Например, когда узел В № n разрешает пакетную передачу РВТКВ, grantn=1, а когда узел В № n запрещает пакетную передачу РВТКВ, grantn=0. Параметр wn - это весовой коэффициент для управляющей информации диспечеризации узла В № n, и параметр Rmaxn означает максимальную скорость передачи данных, разрешенную узлом В № n. В целом, поскольку для увеличения скорости передачи данных требуется более высокая мощность передачи, можно сообщать ПО разрешенную максимальную мощность передачи вместо разрешенной максимальной скорости передачи данных, чтобы ПО вычисляло разрешенную максимальную скорость передачи данных.
Согласно фиг.9, объединитель 901 команд диспетчеризации объединяет команды диспетчеризации, полученные от активных узлов В, в управляющую информацию диспетчеризации с использованием весовых коэффициентов w1, w2,..., wn. Весовые коэффициенты должны удовлетворять условию

Объединитель 901 команд диспетчеризации состоит из генератора 910 значения предоставления и генератора 920 максимальной скорости передачи данных. Генератор 910 значения предоставления объединяет значения предоставления диспетчеризации, полученные от активных узлов В, и выдает результирующее значение предоставления grant в контроллер 902 передачи РВТКВ. Генератор 920 максимальной скорости передачи данных объединяет разрешенные максимальные скорости передачи данных, полученные от активных узлов В, и выдает результирующую разрешенную максимальную скорость передачи данных Rmax в контроллер 902 передачи РВТКВ.
Контроллер 902 передачи РВТКВ управляет передатчиком 904 пакетов РВТКВ так, что последний передает пакет РВТКВ, когда grant=1, и не передает пакет РВТКВ, когда grant=0. Когда grant=1, контроллер 902 передачи РВТКВ определяет транспортный формат РВТКВ, имеющий максимальную скорость передачи данных Rmax, с учетом состояния буфера 903 данных РВТКВ, и передает этот транспортный формат РВТКВ передатчику 904 пакетов РВТКВ. Транспортный формат РВТКВ также сообщается активным узлам В по РВ-ВФКУ. Передатчик 904 пакетов РВТКВ считывает указанный объем данных из буфера 903 данных РВТКВ согласно транспортному формату РВТКВ и передает считанные данные в активные узлы В по РВ-ВФКД после канального кодирования и модуляции. Теперь подробно опишем генератор 910 значения предоставления для вычисления grant и генератор 920 максимальной скорости передачи данных для вычисления Rmax.
В генераторе 910 значения предоставления умножители 912, 913 и 914, количество которых равно количеству активных узлов В, умножают значения предоставления диспетчеризации grant1, grant2,..., grantN, полученные от активных узлов: узла В № 1, узла В № 2,..., узла В № N, на весовые коэффициенты w1, w2,..., wn соответственно, и их выходные сигналы поступают в сумматор 915. Сумматор 915 складывает выходные сигналы умножителей 912, 913 и 914 и выводит сигнал grantоб. Сигнал grantee умножается на «-1» в умножителе 916, а затем складывается с «+1» в сумматоре 917, в результате чего генерируется «1 - grantоб». Выходной сигнал «1 -grantоб» сумматора 917 можно выразить в виде порога Тотпр, определенного в уравнении (3).
 (3)
(3)
Можно заметить, что Тотпр, вычисленное согласно уравнению (3), удовлетворяет условию 0≤Тотпр≤1.
Генератор 918 «равномерной» случайной величины генерирует случайную переменную х (0≤х<1), имеющую равномерное распределение, и выдает генерированную случайную переменную в компаратор 919. Компаратор 919 сравнивает случайную переменную х с Тотпр. Если результат сравнения удовлетворяет условию х≥Тотпр, то компаратор 919 выводит в качестве результирующего значения предоставления grant=1. Если же результат сравнения удовлетворяет условию х<Тотпр, то компаратор 919 выводит в качестве результирующего значения предоставления grant=0. Поэтому когда порог Тотпр снижается, вероятность того, что ПО отправит пакет РВТКВ, возрастает. Выходной сигнал grant компаратора 919 поступает в контроллер 902 передачи РВТКВ.
В генераторе 920 максимальной скорости передачи данных максимальные скорости передачи данных Rmax1, Rmax2,..., RmaxN, полученные от соответствующих активных узлов В, умножаются на весовые коэффициенты w1, w2,..., wN, соответственно умножителями 921, 922 и 923, количество которых равно количеству активных узлов В, после чего поступают в сумматор 924. Сумматор 924 складывает выходные сигналы умножителей 921, 922 и 923 и выдает Rmax, определенную уравнением (4):
 (4)
(4)
Rmax, вычисленная согласно уравнению (4), поступает в контроллер 902 передачи РВТКВ. Если конкретный узел В № m не разрешает пакетную передачу РВТКВ, то генератор 920 максимальной скорости передачи данных при вычислении Rmax задает соответствующую Rmaxm=0.
В вышеописанном передающем устройстве для ПО, если желательно применить более высокий весовой коэффициент к управляющей информации диспетчеризации конкретного узла В № m, весовой коэффициент wm для конкретного узла В № m можно увеличить. При использовании передающего устройства, показанного на фиг.9, чтобы изменить вероятность пакетной передачи РВТКВ с ПО для данной управляющей информации диспетчеризации, можно сделать так, чтобы случайная переменная x, генерированная генератором 918 равномерной случайной величины, имела другое распределение вероятности.
Например, если увеличить вероятность генерирования большой случайной переменной х, то вероятность пакетной передачи РВТКВ увеличивается. Таким образом, вероятностью пакетной передачи РВТКВ и скоростью передачи данных ПО для разных команд диспетчеризации от активных узлов В можно управлять, регулируя распределение весовых коэффициентов w1, w2,..., wN и случайной переменной х. Например, можно задавать одинаковые или разные весовые коэффициенты. В данном варианте осуществления сумма весовых коэффициентов ограничена 1. Однако когда сумма весовых коэффициентов равна k, сумматор 917 прибавляет +k, и генератор 918 равномерной случайной переменной генерирует случайную переменную х (0≤х<k), имеющую равномерное распределение, для осуществления вышеописанной процедуры. Для максимальной скорости передачи данных, если сумма весовых коэффициентов задана равной k, расчетную скорость передачи данных можно получить делением выходного значения сумматора 924 на k.
В модифицированном варианте осуществления, если сумма весовых коэффициентов равна 1, генератор 918 равномерной случайной переменной генерирует случайную переменную х (0≤х<1), имеющую равномерное распределение, и случайную переменную х можно непосредственно сравнивать с выходным значением сумматора 915. Таким образом, передачу данных можно разрешить, если х<Тотпр. Кроме того, если сумма весовых коэффициентов равна k, то генератор 918 равномерной случайной переменной генерирует случайную переменную х (0≤х<k), имеющую равномерное распределение, и случайная переменная х непосредственно сравнивается с выходным значением сумматора 915. Кроме того, расчетную скорость передачи данных можно получить делением выходного значения сумматора 924 на k.
На фиг.10 изображена логическая блок-схема процедуры управления, осуществляемой в ПО объединителем команд диспетчеризации, показанным на фиг.9. Согласно фиг.10, на этапе 1010 ПО принимает от активных узлов В значения предоставления диспетчеризации grantn и максимальные разрешенные скорости передачи данных Rmaxn. На этапе 1012 ПО вычисляет Тотпр согласно уравнению (3). На этапе 1014 ПО генерирует случайную переменную х (0≤х<1), имеющую равномерное распределение, а затем на этапе 1016 сравнивает равномерную случайную переменную х с Тотпр.
Если результат сравнения удовлетворяет условию х<Тотпр, то ПО не передает пакет РВТКВ. Если же результат сравнения удовлетворяет условию х≥Тотпр, то ПО переходит к этапу 1018, на котором вычисляет максимальную разрешенную скорость передачи данных Rmax согласно уравнению (4). На этапе 1020 ПО определяет скорость передачи данных более низкую, чем Rmax, с учетом состояния буфера РВТКВ и разрешенного времени задержки. Затем на этапе 1022 ПО передает пакет РВТКВ на этой скорости передачи данных.
Для выполнения первого варианта осуществления, описанного со ссылкой на фиг.9 и 10, КРС должен предварительно сообщить в ПО весовые коэффициенты w1, w2,..., wN для информации диспетчеризации активных узлов В. Весовые коэффициенты w1, w2,..., wN можно передавать совместно с сообщением УРР (управления радиоресурсами) (например, сообщением обновления активного набора), которое КРС передает в ПО, когда ПО входит в зону мягкой передачи обслуживания. В нижеследующих Таблицах 1 и 2 приведен иллюстративный формат сообщения обновления активного набора для передачи w1, w2,..., wN. В Таблицах 1 и 2 информационные параметры, добавленные для первого варианта осуществления, выделены курсивом.
информации/группы
* Информация весовых коэффициентов
информации/группы
для объединения информации диспетчеризации
Второй вариант осуществления
На фиг.11 показана блок-схема другого иллюстративного объединителя команд диспетчеризации, показанного на фиг.8, а на фиг.12 показана логическая блок-схема процедуры управления, осуществляемой объединителем команд диспетчеризации, показанным на фиг.11. Таким образом, фиг.11 и 12 иллюстрируют устройство и способ, применяемые в ПО в соответствии с другим вариантом осуществления, применимым, когда узел В передает в ПО в качестве управляющей информации диспетчеризации допустимость пакетной передачи РВТКВ и разрешенную максимальную скорость передачи данных. Допустимость пакетной передачи РВТКВ можно заменить информацией, указывающей, передано ли на соответствующее ПО сообщение предоставления диспетчеризации. Таким образом, если на соответствующе ПО передано сообщение предоставления диспетчеризации, то ПО определяет, что пакетная передача РВТКВ разрешена. В противном случае ПО определяет, что пакетная передача РВТКВ не разрешена.
На фиг.11 параметр grantn - это значение предоставления диспетчеризации, указывающее, передал ли узел В № n на соответствующее ПО сообщение предоставления диспетчеризации. Например, когда узел В № n разрешает пакетную передачу РВТКВ, grantn=1, а когда узел В № n запрещает пакетную передачу РВТКВ, grantn=0. Параметр wn - это весовой коэффициент для управляющей информации диспечеризации узла В № n, и параметр Rmaxn означает максимальную скорость передачи данных, разрешенную узлом В № n. В целом, поскольку для увеличения скорости передачи данных требуется более высокая мощность передачи, можно сообщать ПО разрешенную максимальную мощность передачи вместо разрешенной максимальной скорости передачи данных, чтобы ПО вычисляло разрешенную максимальную скорость передачи данных.
Согласно фиг.11, объединитель 1101 команд диспетчеризации объединяет команды диспетчеризации, полученные от активных узлов В, в управляющую информацию диспетчеризации с использованием весовых коэффициентов w1, w2,..., wN. Весовые коэффициенты должны n удовлетворять условию
 .
.
Объединитель 1101 команд n=1 диспетчеризации делится на генератор 1110 значения предоставления и генератор 1120 максимальной скорости передачи данных. Генератор 1110 значения предоставления объединяет значения предоставления диспетчеризации, полученные от активных узлов В, и выдает результирующее значение предоставления grant в контроллер 1102 передачи РВТКВ. Генератор 1120 максимальной скорости передачи данных объединяет разрешенные максимальные скорости передачи данных, полученные от активных узлов В, и выдает результирующую разрешенную максимальную скорость передачи данных Rmax в контроллер 1102 передачи РВТКВ.
Контроллер 1102 передачи РВТКВ управляет передатчиком 1104 пакетов РВТКВ так, что последний передает пакет РВТКВ, когда grant=1, и не передает пакет РВТКВ, когда grant=0. Когда grant=1, контроллер 1102 передачи РВТКВ определяет транспортный формат РВТКВ, имеющий максимальную скорость передачи данных Rmax, с учетом состояния буфера 1103 данных РВТКВ, и выдает определенный транспортный формат РВТКВ в передатчик 1104 пакетов РВТКВ. Транспортный формат РВТКВ также сообщается активным узлам В по РВ-ВФКУ. Передатчик 1104 пакетов РВТКВ считывает указанный объем данных из буфера 1103 данных РВТКВ согласно транспортному формату РВТКВ и передает считанные данные в активные узлы В по РВ-ВФКД после канального кодирования и модуляции.
В генераторе 1110 значения предоставления умножители 1111, 1112 и 1113, количество которых равно количеству активных узлов В, умножают значения предоставления диспетчеризации grant1, grant2,..., grantN, полученные от активных узлов: узла В № 1, узла В № 2,..., узла В № N, на весовые коэффициенты w1, w2,..., wN соответственно, и их выходные сигналы поступают в сумматор 1114. Сумматор 1114 складывает выходные сигналы умножителей 1111, 1112 и 1113 и выводит сигнал grantоб, определенный в уравнении (5).

Можно заметить, что grantee, вычисленное согласно уравнению (5), удовлетворяет условию 0≤grantоб≤1.
Компаратор 1115 сравнивает grantоб с порогом Тотпр. Если результат сравнения удовлетворяет условию grantоб≥Тотпр, то компаратор 1115 в качестве результирующего значения предоставления выводит grant=1. Если же результат сравнения удовлетворяет условию grantоб<Тотпр, то компаратор 1115 выводит,
в качестве результирующего значения предоставления grant=0. Поэтому когда порог Тотпр снижается, вероятность того, что ПО отправит пакет РВТКВ, возрастает. Выходной сигнал grant компаратора 1115 поступает в контроллер 1102 передачи РВТКВ.
В генераторе 1120 максимальной скорости передачи данных максимальные скорости передачи данных Rmax1, Rmax2,..., RmaxN, полученные от соответствующих активных узлов В, умножаются на весовые коэффициенты w1, w2,..., wN соответственно умножителями 1121, 1122 и 1123, количество которых равно количеству активных узлов В, после чего поступают в сумматор 1124. Сумматор 1124 складывает выходные сигналы умножителей 1121, 1122 и 1123 и выдает Rmax, определенную уравнением (6):

Rmax, вычисленная согласно уравнению (6), поступает в контроллер 1102 передачи РВТКВ. Если конкретный узел В № m запрещает пакетную передачу РВТКВ, то генератор 1120 максимальной скорости передачи данных при вычислении Rmax задает соответствующую Rmaxm=0.
В вышеописанном передающем устройстве для ПО, если желательно применить более высокий весовой коэффициент к управляющей информации диспетчеризации конкретного узла В № m, весовой коэффициент wm для конкретного узла В № m можно увеличить. При использовании передающего устройства, показанного на фиг.11, чтобы изменить вероятность пакетной передачи РВТКВ с ПО для данной управляющей информации диспетчеризации, можно регулировать порог Тотпр.
Например, если снизить Tотпр, то вероятность пакетной передачи РВТКВ увеличится, а если повысить Тотпр, то вероятность пакетной передачи РВТКВ уменьшится. Таким образом, вероятностью пакетной передачи РВТКВ и скоростью передачи данных ПО для разных команд диспетчеризации от активных узлов В можно управлять, регулируя весовые коэффициенты w1, w2,..., wN и порог Тотпр. Например, можно задать одинаковые или разные весовые коэффициенты. В данном варианте осуществления сумма весовых коэффициентов ограничена 1. Однако сумма весовых коэффициентов может быть равна k. В этом случае Тотпр изменяется в соответствии с изменением суммы k весовых коэффициентов, и значение предоставления диспетчеризации можно генерировать путем осуществления вышеупомянутой процедуры. Для максимальной скорости передачи данных, если сумма весовых коэффициентов задана равной k, расчетную скорость передачи данных можно получить делением выходного значения сумматора 1124 на k.
На фиг.12 изображена логическая блок-схема процедуры управления, осуществляемой в ПО объединителем команд диспетчеризации, показанным на фиг.11. Согласно фиг.12, на этапе 1210 ПО принимает от активных узлов В значения предоставления диспетчеризации grantn и максимальные разрешенные скорости передачи данных Rmaxn. На этапе 1212 ПО вычисляет grantоб согласно уравнению (5). На этапе 1214 ПО сравнивает вычисленное grantоб с порогом Тотпр. Если результат сравнения удовлетворяет условию grantоб<Тотпр, то ПО не передает пакет РВТКВ. Если же результат сравнения удовлетворяет условию grantоб≥Тотпр, то ПО переходит к этапу 1216, на котором вычисляет максимальную разрешенную скорость передачи данных Rmax согласно уравнению (6). На этапе 1218 ПО определяет скорость передачи данных более низкую, чем Rmax, с учетом состояния буфера РВТКВ и разрешенного времени задержки. Затем на этапе 1220 ПО передает пакет РВТКВ на этой скорости передачи данных.
Для выполнения второго варианта осуществления, описанного со ссылкой на фиг.11 и 12, КРС должен предварительно сообщить в ПО весовые коэффициенты w1, w2,..., wN для информации диспетчеризации активных узлов В и порог Тотпр. Весовые коэффициенты w1, w2,..., wN и порог Тотпр можно передавать совместно с сообщением УРР (например, сообщением обновления активного набора), КРС передает в ПО, когда ПО входит в зону мягкой передачи обслуживания. В нижеследующих Таблицах 3 и 4 приведен иллюстративный формат сообщения обновления активного набора для передачи w1, w2,..., wN и порога Тотпр. В Таблицах 3 и 4 информационные параметры, добавленные для второго варианта осуществления, выделены курсивом.
Таблица 3
Таблица 4
* Информация весовых коэффициентов
Третий вариант осуществления
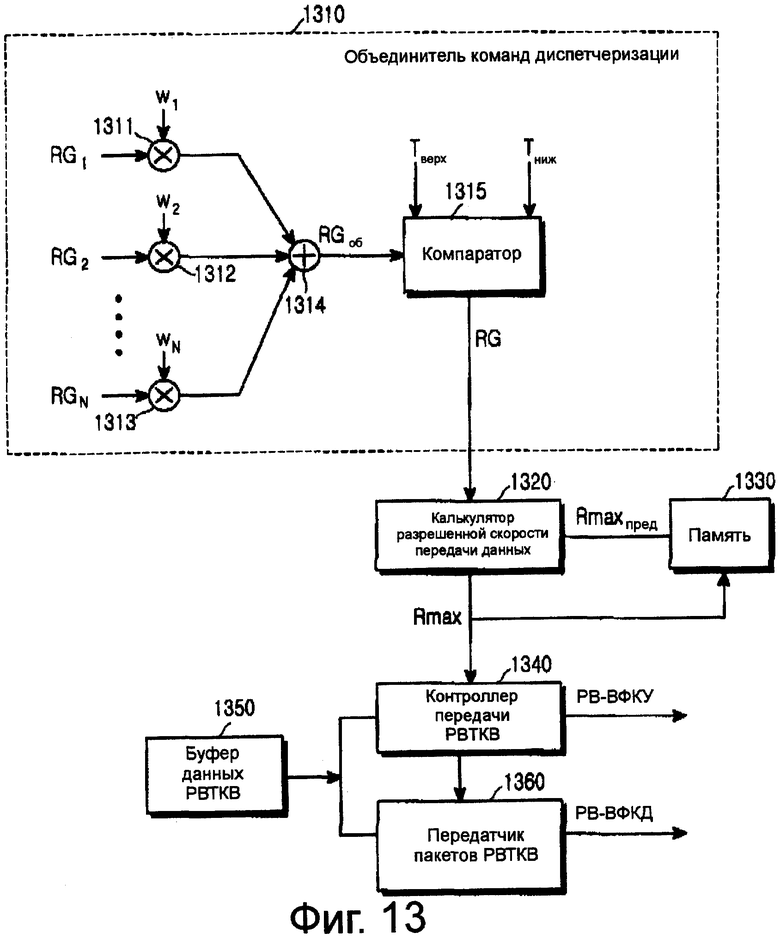
На фиг.13 показана блок-схема еще одного иллюстративного варианта осуществления объединителя команд диспетчеризации, показанного на фиг.8, а на фиг.14 показана логическая блок-схема процедуры управления, осуществляемой объединителем команд диспетчеризации, показанным на фиг.13. Таким образом, фиг.13 и 14 иллюстрируют вариант осуществления, который можно применять к системе, в которой активные узлы В передают в ПО в качестве команды диспетчеризации команду предоставления скорости, указывающую увеличение, сохранение или уменьшение максимальной разрешенной скорости передачи данных. Затем ПО увеличивает, сохраняет или уменьшает максимальную разрешенную скорость передачи данных в соответствии с командой предоставления скорости и передает пакет РВТКВ на скорости передачи данных, более низкой, чем максимальная разрешенная скорость передачи данных, с учетом состояния буфера данных РВТКВ и разрешенного времени задержки.
На фиг.13 параметр RGn - это команда предоставления скорости, переданная узлом В № n. Например, RGn=1 представляет увеличение максимальной разрешенной скорости передачи данных, RGn=0 представляет сохранение максимальной разрешенной скорости передачи данных, и RGn=-1 представляет уменьшение максимальной разрешенной скорости передачи данных. Параметр wn представляет собой весовой коэффициент для команды предоставления скорости узла В № n. В целом, поскольку для увеличения скорости передачи данных требуется более высокая мощность передачи, можно сообщать ПО об увеличении, поддержании или уменьшении максимальной разрешенной мощности передачи, а не об увеличении, поддержании или уменьшении максимальной разрешенной скорости передачи данных, чтобы ПО вычисляло максимальную разрешенную скорость передачи данных.
Согласно фиг.13, объединитель 1310 команд диспетчеризации объединяет команды диспетчеризации, т.е. команды предоставления скорости, полученные от активных узлов В, в одну команду RG предоставления скорости с использованием весовых коэффициентов w1, w2,..., wN. Весовые коэффициенты должны удовлетворять условию

Результирующая команда RG предоставления скорости поступает в калькулятор 1320 разрешенной скорости передачи данных. Калькулятор 1320 разрешенной скорости передачи данных вычисляет новую максимальную разрешенную скорость передачи данных Rmax на основании предыдущей максимальной разрешенной скорости передачи данных Rmaxпред, сохраненной в памяти 1330, и результирующей команды RG предоставления скорости. Например, когда RG=1 или RG=-1, для вычисления новой максимальной разрешенной скорости передачи данных Rmax можно прибавить или вычесть заданное изменение скорости передачи данных к/из предыдущей максимальной разрешенной скорости передачи данных Rmaxпред. Когда RGn=0, в качестве текущей максимальной разрешенной скорости передачи данных Rmax можно использовать предыдущую максимальную разрешенную скорость передачи данных Rmaxпред. Управление максимальной разрешенной скоростью передачи данных Rmax можно выразить в уравнении (7).
 (7)
(7)
В уравнении (7)  обозначает предыдущую максимальную разрешенную скорость передачи данных, сохраненную в памяти 1330, a ΔRmax обозначает изменение максимальной разрешенной скорости передачи данных, заранее известное ПО. После вычисления новой Rmax согласно уравнению (7) вновь вычисленную Rmax сохраняют в памяти 1330 в качестве Rmaxпред.
обозначает предыдущую максимальную разрешенную скорость передачи данных, сохраненную в памяти 1330, a ΔRmax обозначает изменение максимальной разрешенной скорости передачи данных, заранее известное ПО. После вычисления новой Rmax согласно уравнению (7) вновь вычисленную Rmax сохраняют в памяти 1330 в качестве Rmaxпред.
Вновь вычисленная Rmax поступает в контроллер 1340 передачи РВТКВ. Контроллер 1340 передачи РВТКВ определяет транспортный формат РВТКВ, имеющий максимальную скорость передачи данных Rmax, с учетом состояния буфера 1350 данных РВТКВ. Этот транспортный формат РВТКВ поступает в передатчик 1360 пакетов РВТКВ и одновременно в активные узлы В по РВ-ВФКУ. Передатчик 1360 пакетов РВТКВ считывает указанный объем данных из буфера 1350 данных РВТКВ, формирует данные РВТКВ согласно транспортному формату РВТКВ и предает данные РВТКВ в активные узлы В по РВ-ВФКД после канального кодирования и модуляции.
В объединителе 1310 команд диспетчеризации для вычисления команд RG предоставления скорости умножители 1311, 1312 и 1313, количество которых равно количеству активных узлов В, умножают команды RG1, RG2,..., RGn предоставления скорости, полученные от активных узла В № 1, узла В № 2,..., узла В № N, на весовые коэффициенты w1, w2,..., wN соответственно, и их выходные сигналы поступают в сумматор 1314. Сумматор 1314 складывает выходные сигналы умножителей 1311, 1312 и 1313 и выдает сигнал RGоб, определенный уравнением (8):
Можно заметить, что RGоб, вычисленное согласно уравнению (8), удовлетворяет условию -1≤RGcomb≤1.
Вычисленное RGоб поступает в компаратор 1315. Компаратор 1315 также получает Tверх и Тниж и сравнивает RGоб с Tверх и Тниж. Если результат сравнения удовлетворяет условию RGоб>Tверх, то компаратор 1315 в качестве результирующего сообщения предоставления скорости выводит RG=1. Если результат сравнения удовлетворяет условию Тниж<RGоб<Tверх, то компаратор 1315 в качестве результирующего сообщения предоставления скорости выводит RG=0. Наконец, если результат сравнения удовлетворяет условию Rgоб≤Тниж, то компаратор 1315 в качестве результирующего сообщения предоставления скорости выводит RG=-1. Поэтому когда порог Tверх снижается, вероятность того, что ПО увеличит максимальную разрешенную скорость передачи данных, возрастает, а когда порог Тниж возрастает, вероятность того, что ПО уменьшит максимальную разрешенную скорость передачи данных, возрастает. Таким образом, можно управлять вероятностью того, что ПО увеличит, сохранит или уменьшит максимальную разрешенную скорость передачи данных в соответствии с различными командами предоставления скорости от активных узлов В, регулируя два порога Tверх и Тниж.
Сигнал RG, выдаваемый компаратором 1315, поступает в калькулятор 1320 разрешенной скорости передачи данных, который вычисляет новую максимальную разрешенную скорость передачи данных. В передающем устройстве для ПО, показанном на фиг.13, если желательно применить более высокий весовой коэффициент к команде диспетчеризации конкретного узла В № m, весовой коэффициент wm для конкретного узла В № m можно увеличить.
На фиг.14 изображена логическая блок-схема процедуры управления, осуществляемой в ПО передающим устройством, показанным на фиг.13. Согласно фиг.14, на этапе 1410 ПО принимает команды предоставления скорости RGn от активных узлов В. На этапе 1412 ПО вычисляет RGоб согласно уравнению (8), а затем переходит к этапу 1414, на котором он сравнивает вычисленную RGоб с Tверх. Если результат сравнения удовлетворяет условию RGоб>Tверх, то на этапе 1418 ПО задает RG=1. Если результат сравнения удовлетворяет условию RGоб≤Tверх, то ПО переходит к этапу 1416, на котором он сравнивает вычисленную RGоб с Tверх и Тниж. Если результат сравнения удовлетворяет условию Тниж<RGоб≤Tверх, то ПО на этапе 1422 задает RG=-1. На этапе 1424 ПО вычисляет максимальную разрешенную скорость передачи данных Rmax на основании RG, заданной на этапе 1418, 1420 или 1422, и ранее заданной Rmaxпред. На этапе 1426 ПО определяет скорость передачи данных более низкую, чем Rmax, с учетом состояния буфера РВТКВ и разрешенного времени задержки. Затем на этапе 1428 ПО передает пакет РВТКВ на определенной скорости передачи данных. Можно задать одинаковые или разные весовые коэффициенты. В данном варианте осуществления сумма весовых коэффициентов ограничена 1. Однако сумма весовых коэффициентов может быть равна k. В этом случае Tверх и Тниж изменяется в соответствии с изменением суммы k весовых коэффициентов, и сообщение RG можно генерировать путем осуществления вышеупомянутой процедуры.
Для работы второго варианта осуществления, описанного со ссылкой на фиг.13 и 14, КРС должен предварительно сообщить ПО весовые коэффициенты w1, w2,..., wN для информации диспетчеризации активных узлов В и пороги Tверх и Тниж. Весовые коэффициенты w1, w2,..., wN и пороги Tверх и Тниж можно передавать совместно с сообщением УРР (например, сообщением обновления активного набора), которые КРС передает в ПО, когда ПО входит в зону мягкой передачи обслуживания. В нижеприведенных Таблицах 5 и 6 приведен иллюстративный формат сообщения обновления активного набора для передачи w1, w2,..., wN и порогов Тup и Tdown.
Таблица 5
Таблица 6
* Информация весовых коэффициентов
Из вышеприведенного описания следует, что хотя ПО, использующее услугу РВТКВ в зоне мягкой передачи обслуживания, принимает разные команды диспетчеризации от совокупности активных узлов В, услуга РВТКВ может осуществляться в оптимальной среде радиосвязи, способствуя повышению пропускной способности приема.
Хотя настоящее изобретение было показано и описано со ссылкой на определенные предпочтительные варианты его осуществления, специалистам в данной области техники очевидны различные изменения в форме и деталях, не выходящие за пределы сущности и объема изобретения, указанные в прилагаемой формуле изобретения.






Изобретение относится к асинхронным системам мобильной связи и может использоваться в пользовательском оборудовании (ПО), находящемся в зоне мягкой передачи обслуживания. Технический результат состоит в повышении пропускной способности приема данных. Диспетчеризация осуществляется так, что хотя ПО, использующее услугу расширенного выделенного транспортного канала восходящей линии связи (РВТКВ) в зоне мягкой передачи обслуживания, принимает разные команды диспетчеризации от нескольких активных узлов В, услуга РВТКВ может осуществляться в оптимальной среде радиосвязи. 4 н. и 27 з.п. ф-лы, 14 ил.
 wn обозначает весовой коэффициент, предварительно определенный для каждой из команд диспетчеризации, a grantn обозначает допустимость передачи пакетных данных для каждого из узлов В, выводят результирующее значение предоставления диспетчеризации, указывающее возможность передачи пакетных данных в соответствии с результатом сравнения, умножают максимальные скорости передачи данных для узлов В, обеспеченные в качестве команд диспетчеризации, на весовые коэффициенты, ранее определенные для каждой команды диспетчеризации в отдельности, суммируют максимальные скорости передачи данных, умноженные на весовые коэффициенты, и выводят результат сложения в качестве результирующей максимальной скорости передачи данных.
wn обозначает весовой коэффициент, предварительно определенный для каждой из команд диспетчеризации, a grantn обозначает допустимость передачи пакетных данных для каждого из узлов В, выводят результирующее значение предоставления диспетчеризации, указывающее возможность передачи пакетных данных в соответствии с результатом сравнения, умножают максимальные скорости передачи данных для узлов В, обеспеченные в качестве команд диспетчеризации, на весовые коэффициенты, ранее определенные для каждой команды диспетчеризации в отдельности, суммируют максимальные скорости передачи данных, умноженные на весовые коэффициенты, и выводят результат сложения в качестве результирующей максимальной скорости передачи данных. где wn обозначает весовой коэффициент, предварительно определенный для каждой из команд диспетчеризации, а grantn обозначает допустимость передачи пакетных данных для каждого из узлов В, выводят результирующее значение предоставления диспетчеризации, указывающее возможность передачи пакетных данных в соответствии с результатом сравнения, умножают максимальные скорости передачи данных для узлов В, обеспеченные в качестве команд диспетчеризации, на весовые коэффициенты, ранее определенные для каждой команды диспетчеризации в отдельности, суммируют максимальные скорости передачи данных, умноженные на весовые коэффициенты, и делят результат сложения на величину k, которая является суммой весовых коэффициентов, и выводят результат деления в качестве результирующей максимальной скорости передачи данных.
где wn обозначает весовой коэффициент, предварительно определенный для каждой из команд диспетчеризации, а grantn обозначает допустимость передачи пакетных данных для каждого из узлов В, выводят результирующее значение предоставления диспетчеризации, указывающее возможность передачи пакетных данных в соответствии с результатом сравнения, умножают максимальные скорости передачи данных для узлов В, обеспеченные в качестве команд диспетчеризации, на весовые коэффициенты, ранее определенные для каждой команды диспетчеризации в отдельности, суммируют максимальные скорости передачи данных, умноженные на весовые коэффициенты, и делят результат сложения на величину k, которая является суммой весовых коэффициентов, и выводят результат деления в качестве результирующей максимальной скорости передачи данных. где wn обозначает весовой коэффициент, предварительно определенный для каждой из команд диспетчеризации, а grantn обозначает допустимость передачи пакетных данных для каждого из узлов В, и (ii) вывода результирующего значения предоставления диспетчеризации, указывающего возможность передачи пакетных данных в соответствии с результатом сравнения, и генератор максимальной скорости передачи данных для умножения максимальных скоростей передачи данных для узлов В, обеспеченных в качестве команд диспетчеризации, на весовые коэффициенты, ранее определенные для каждой команды диспетчеризации в отдельности, суммирования максимальных скоростей передачи данных, умноженных на весовые коэффициенты, и вывода результата сложения в качестве результирующей максимальной скорости передачи данных.
где wn обозначает весовой коэффициент, предварительно определенный для каждой из команд диспетчеризации, а grantn обозначает допустимость передачи пакетных данных для каждого из узлов В, и (ii) вывода результирующего значения предоставления диспетчеризации, указывающего возможность передачи пакетных данных в соответствии с результатом сравнения, и генератор максимальной скорости передачи данных для умножения максимальных скоростей передачи данных для узлов В, обеспеченных в качестве команд диспетчеризации, на весовые коэффициенты, ранее определенные для каждой команды диспетчеризации в отдельности, суммирования максимальных скоростей передачи данных, умноженных на весовые коэффициенты, и вывода результата сложения в качестве результирующей максимальной скорости передачи данных. где wn обозначает весовой коэффициент, предварительно определенный для каждой из команд диспетчеризации, а grantn обозначает допустимость передачи пакетных данных для каждого из узлов В, и вывода результирующего значения предоставления диспетчеризации, указывающего возможность передачи пакетных данных в соответствии с результатом сравнения, и генератор максимальной скорости передачи данных для умножения максимальных скоростей передачи данных для узлов В, обеспеченных в качестве команд диспетчеризации, на весовые коэффициенты, ранее определенные для каждой команды диспетчеризации в отдельности, суммирования максимальных скоростей передачи данных, умноженных на весовые коэффициенты, деления результата сложения на k и вывода результата деления в качестве результирующей максимальной скорости передачи данных.
где wn обозначает весовой коэффициент, предварительно определенный для каждой из команд диспетчеризации, а grantn обозначает допустимость передачи пакетных данных для каждого из узлов В, и вывода результирующего значения предоставления диспетчеризации, указывающего возможность передачи пакетных данных в соответствии с результатом сравнения, и генератор максимальной скорости передачи данных для умножения максимальных скоростей передачи данных для узлов В, обеспеченных в качестве команд диспетчеризации, на весовые коэффициенты, ранее определенные для каждой команды диспетчеризации в отдельности, суммирования максимальных скоростей передачи данных, умноженных на весовые коэффициенты, деления результата сложения на k и вывода результата деления в качестве результирующей максимальной скорости передачи данных. , где N обозначает количество сот, и передают весовые коэффициенты, вычисленные для каждой соты в отдельности, в ПО посредством сообщения управления радиоресурсами (УРР).
, где N обозначает количество сот, и передают весовые коэффициенты, вычисленные для каждой соты в отдельности, в ПО посредством сообщения управления радиоресурсами (УРР). , где N обозначает количество сот, и передают весовые коэффициенты, вычисленные в отдельности для каждой соты из нескольких сот, в ПО посредством сообщения управления радиоресурсами (УРР).
, где N обозначает количество сот, и передают весовые коэффициенты, вычисленные в отдельности для каждой соты из нескольких сот, в ПО посредством сообщения управления радиоресурсами (УРР).
| СПОСОБ ПРИНЯТИЯ РЕШЕНИЯ О ПЕРЕДАЧЕ СВЯЗИ С ОДНОГО РЕСУРСА СВЯЗИ НА ДРУГОЙ | 1994 |
|
RU2117396C1 |
| УСТРОЙСТВО СИСТЕМ СВЯЗИ | 1995 |
|
RU2144745C1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| US 4718081 А, 05.01.1988. | |||

