Изобретение относится к авиационной технике и может использоваться в системах регулируемого торможения, спуска и планирования высокоскоростных летательных аппаратов.
Из уровня техники известно устройство для спуска в атмосфере отделяемого от гиперзвукового летательного аппарата элемента по RU 2086903 С1, 10.08.1997, включающее отделяемый элемент и стабилизирующее устройство, которое выполнено в виде статически устойчивого в аэродинамическом потоке жесткого тела баллистического типа. Это устройство обеспечивает ориентированное движение отделяемого элемента на участке спуска в атмосфере на заданном угле атаки. Однако неизменяемая форма стабилизирующего устройства и его одиночность не позволяют быстро и точно регулировать скорость снижения отделяемого элемента.
Известно также устройство надувной пассивной системы торможения последней ступени ракеты-носителя по RU 2199474 С2, 27.02.2003, выполненное в виде автономного моноблока, включающего контейнер и надуваемую конструкцию, выполненную в виде набора сферических оболочек из эластичной пленки, заключенных в сетчатую оболочку. Развертывание надувной конструкции в рабочее состояние обеспечивается за счет остаточного воздуха внутри оболочек, и надув в них не может регулироваться во времени в зависимости от скорости движения ступени ракеты-носителя и параметров окружающей среды (давления и температуры). Кроме того, плавному регулированию скорости снижения препятствует неизменяемая форма оболочек.
Наиболее близким к заявляемому изобретению является устройство для спасения в жидкой, газообразной и вакуумной средах по RU 2001115846/28, 27.06.2003, содержащее набор полых мешков, внутри каждого из которых размещают источник газообразования, а скорость газообразования контролируется регулирующим приспособлением, изменяющим характеристики дистанционного управляющего сигнала, обеспечивающего управление газообразованием в каждом мешке. Это устройство может быть использовано только на заключительных этапах посадки летательного аппарата и неприменимо на гиперзвуковых скоростях.
Заявляемое изобретение направлено на решение задачи по созданию универсальной системы для управляемого снижения летательного аппарата на всех этапах, в том числе на гиперзвуковых и сверхзвуковых скоростях.
Технический результат, обеспечиваемый заявляемым изобретением, заключается в обеспечении регулируемого (управляемого) движения летательного аппарата при его спуске в атмосфере, в том числе на этапе гиперзвуковых и сверхзвуковых скоростей полета, в достижении необходимого быстродействия системы управления спуском и планированием возможности использования ее во всем диапазоне высот, от самых низких до сверхвысоких, в создании необходимой системы защиты исполнительных средств регулирования скорости спуска, в уменьшении массы и размеров системы управляемого снижения летательного аппарата, а также в максимальном уменьшении радиуса места возможной посадки.
Система управляемого спуска и планирования летательного аппарата, содержащая набор надувных оболочек, каждая из которых содержит, по меньшей мере, одно устройство для регулируемого газообразования и средства для крепления к модулю, для решения вышепоставленной задачи дополнительно содержит контейнер для размещения системы в нерабочем положении в задней и/или верхней части летательного аппарата, поверхности, защищающие набор надувных оболочек, имеющие в рабочем положении степенную, ромбовидную или конусообразную форму, гибкие и/или жесткие фалы для крепления к подвижным устройствам (лебедкам) модуля, включающего набор надувных оболочек, систему выведения надувных оболочек и приведение последних в рабочее положение, систему управления давлением внутри оболочек, систему приведения оболочек в нерабочее положение, при этом поверхности, защищающие набор надувных оболочек, выполнены с возможностью раскрытия на гиперзвуковых скоростях, а степень раскрытия поверхностей зависит от количества надувных оболочек, приведенных в рабочее положение.
При этом надувные оболочки могут иметь изменяемую в процессе движения летательного аппарата форму от ромбовидной до грибовидной, в зависимости от скорости летательного аппарата и параметров внешней среды, либо изменение формы надувной оболочки от ромбовидной до грибовидной может осуществляться через каплевидную форму.
Набор надувных оболочек может состоять из групп оболочек различной формы, при этом каждая из групп приводится в рабочее положение в зависимости от скорости летательного аппарата и параметров внешней среды.
Поверхности, защищающие набор надувных оболочек, могут быть выполнены из термостойкого или абляционного армированного материала.
Планирование летательного аппарата может быть осуществлено путем изменения длины фалов, соединяющих модуль с подвижными устройствами (лебедками), установленными в верхней передней и хвостовой частях летательного аппарата.
Осуществление изобретения поясняется чертежами:
Фиг.1 - система управляемого спуска летательного аппарата;
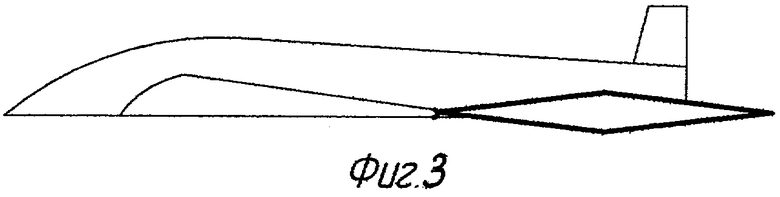
Фиг.2, 3, 4 - крепление контейнеров с модулем и защитными поверхностями различной формы;
Фиг.5 - летательный аппарат с системой, приведенной в рабочее положение;
Фиг.6 - поверхности, защищающие набор оболочек;
Фиг.7 - система в нерабочем положении;
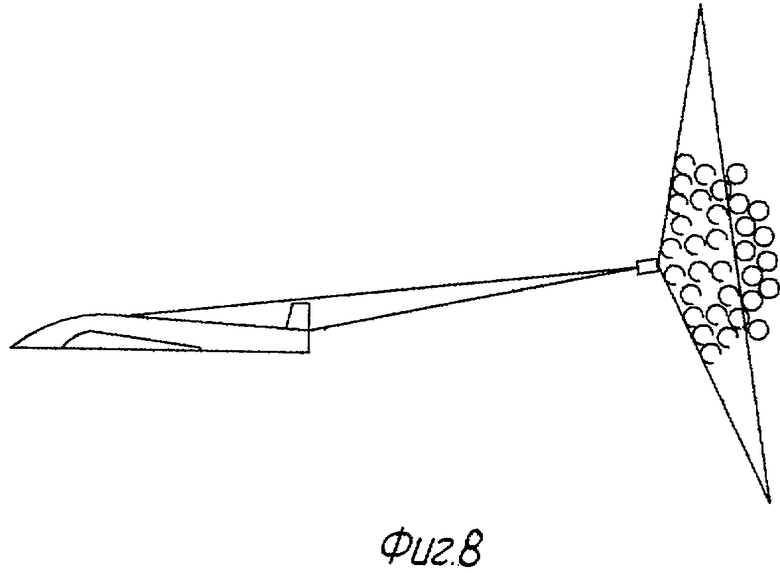
Фиг.8 - положение системы при дальнейшем торможении;
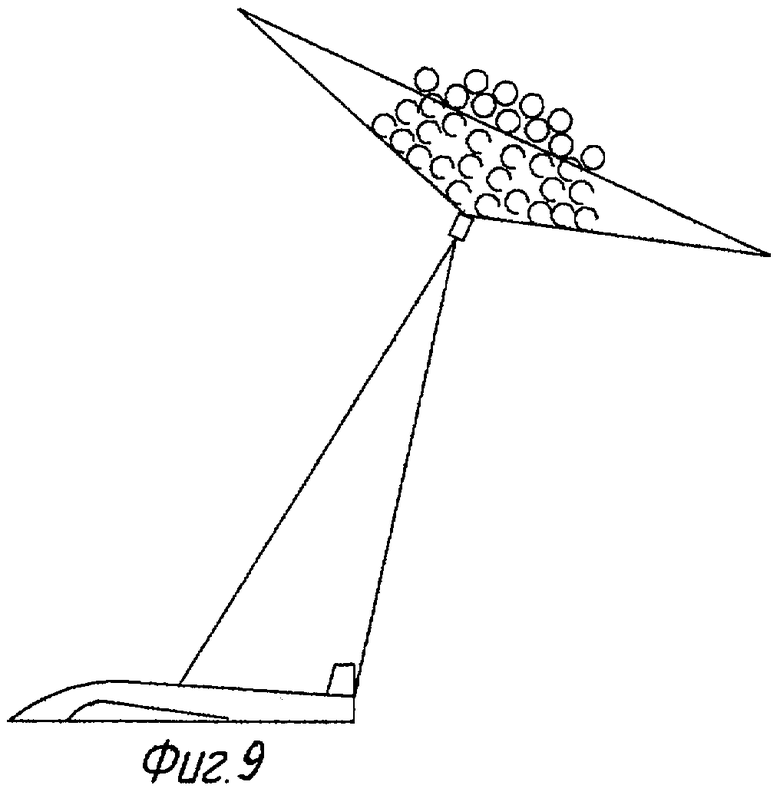
Фиг.9 - положение системы при использовании угла атаки защитной поверхности;
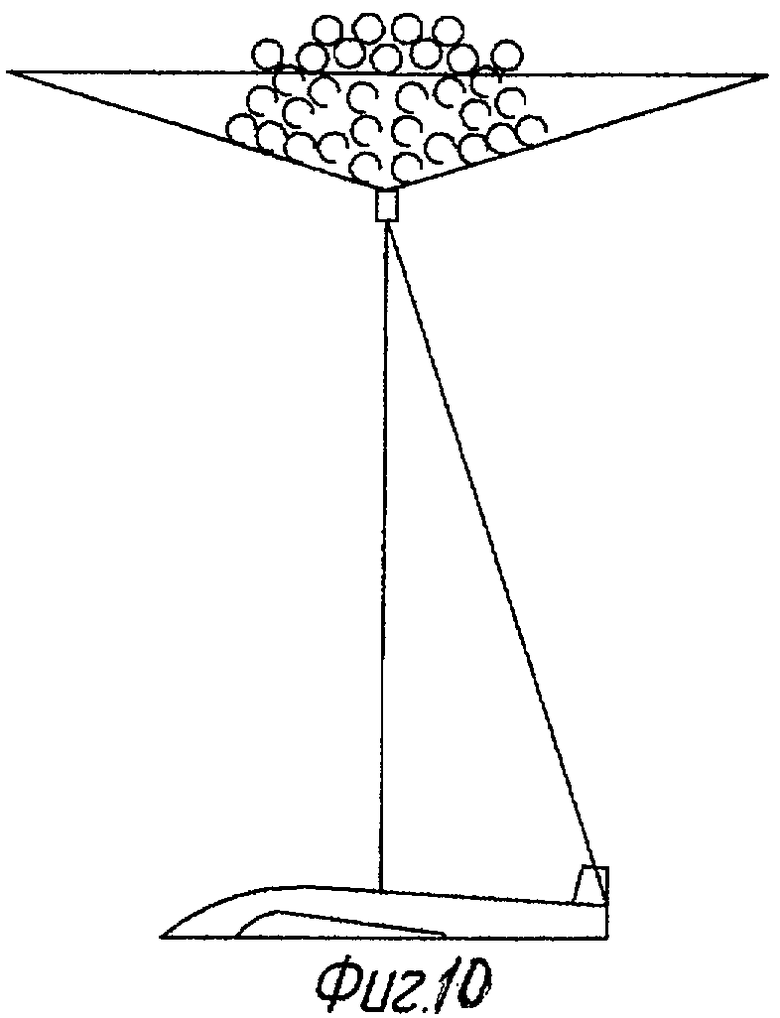
Фиг.10 - положение системы на завершающем этапе спуска.
Система управляемого спуска летательного аппарата содержит набор 1 надувных оболочек, поверхности 2, защищающие набор надувных оболочек, фалы 3 для крепления модуля 4, к которому прикреплены надувные оболочки.
Система применима к любому летательному аппарату и может использоваться на всех этапах спуска. При этом в нерабочем положении (фиг.7) система компактна и имеет хорошие массогабаритные характеристики, за счет исключения комбинированных устройств, используемых обычно для спуска и приземления, а кроме того, за счет использования гибких надувных оболочек в качестве основного ее элемента.
Поверхности 2, защищающие набор надувных оболочек, используются для защиты надувных оболочек в рабочем положении от трения, возникающего при больших скоростях движения. При этом оболочки не обязательно выполнять из термостойких армированных материалов. Поверхности 2 защищают также от попадания гибких оболочек в движущиеся части летательного аппарата.
Поверхности 2 в нерабочем состоянии совместно со всей системой могут располагаться как внутри летательного аппарата, так и с внешней его стороны (фиг.2, 3, 4).
При приведении в рабочее положение поверхности 2 раздвигаются, жестко фиксируясь с помощью раскрывающего и одновременно стопорного механизма (фиг.1).
Фалы 3 служат для соединения модуля с летательным аппаратом и регулирования угла атаки защитной поверхности модуля. Фалы соединяют модуль с подвижными устройствами (лебедками), установленными в верхней передней и хвостовой частях летательного аппарата.
Система управления давлением внутри оболочек может располагаться как внутри модуля 4, так и на борту летательного аппарата.
Система работает следующим образом.
При входе в верхние слои атмосферы летательный аппарат высвобождает модуль 4, присоединенный к нему с помощью фалов 3. Защитные поверхности 2 раздвигаются (фиг.5). Трущиеся об атмосферу защитные поверхности 2 создают тормозную силу, уменьшая скорость движения летательного аппарата. После чего приводится в рабочее положение набор 1 надувных оболочек. При этом, если форма оболочек являются трансформируемой, то надув последних ведется до придания им необходимой на данных скоростях полета формы, а если набор 1 состоит из групп оболочек различных форм, то осуществляется надув оболочек необходимой при данных скоростях полета формы.
Оболочки, распирая и раздвигая защитные поверхности 2, увеличивают угол при вершине модуля 4, увеличивая и силу торможения (фиг.8).
При дальнейшем снижении скорости летательного аппарата осуществляется постепенное изменение формы оболочек, либо поочередное приведение в действие групп оболочек с необходимой формой.
На низких скоростях полета надувные оболочки выводятся из-за защиты, образованной поверхностями 2 с помощью фалов 3, либо поверхности 2 приводятся в нерабочее положение.
На этапе планирования летательного аппарата регулируется не только форма защитной поверхности с помощью управляемого надува оболочек, но и угол атаки защитной поверхности с помощью изменения длины фалов (фиг.9).
Размер и количество надувных оболочек в наборе рассчитывается с учетом таких факторов, влияющих на процесс полета, как скорость движения летательного аппарата, температура и плотность окружающей среды и т.д.
На завершающих этапах снижения система может быть переведена в положение над летательным аппаратом (фиг.10).
Таким образом, заявляемое изобретение позволит создать универсальную систему для управляемого снижения летательного аппарата на всех этапах, в том числе на гиперзвуковых и сверхзвуковых скоростях, обладающую необходимой надежностью и гарантирующую необходимую точность посадки объекта в заранее определенное место.





Изобретение относится к авиационной и космической технике. Система содержит набор надувных оболочек, средства для крепления к модулю, контейнер, поверхности, защищающие набор надувных оболочек, гибкие и/или жесткие фалы для крепления к модулю, систему приведения надувных оболочек в рабочее положение и систему управления давлением внутри оболочек. Защитные поверхности модуля имеют в рабочем положении степенную, ромбовидную или конусообразную форму и выполнены с возможностью раскрытия на гиперзвуковых скоростях. Технический результат - повышение точности посадки. 5 з.п. ф-лы, 10 ил.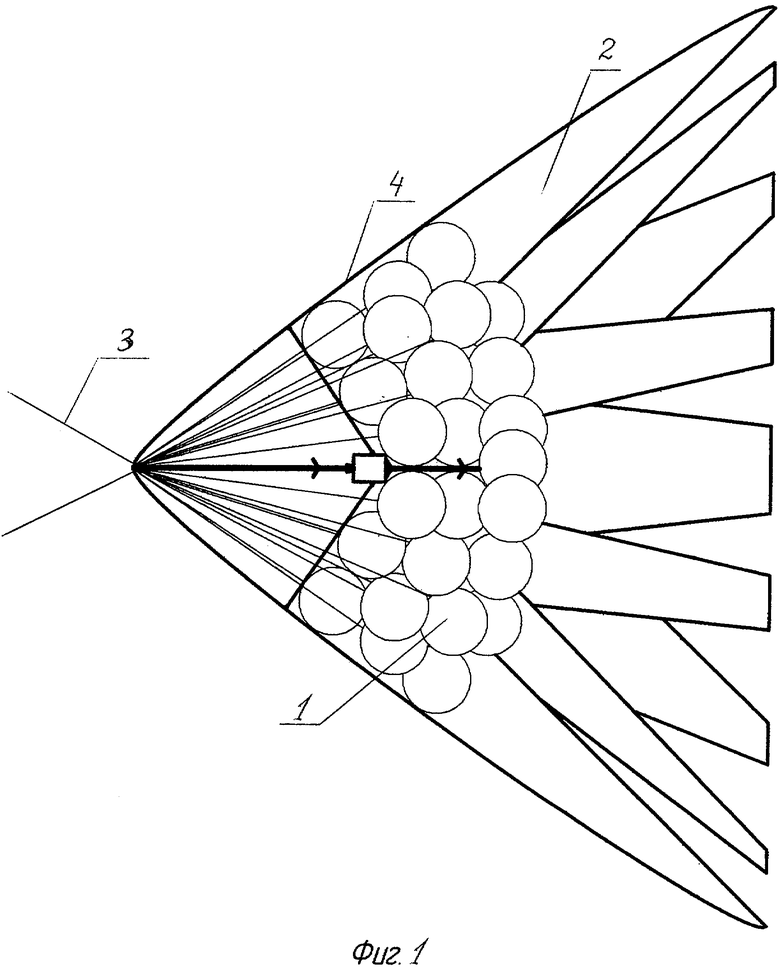
| СПОСОБ СПАСЕНИЯ ОБЪЕКТОВ В ЖИДКОЙ, ГАЗООБРАЗНОЙ И ВАКУУМНОЙ СРЕДАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2224564C2 |

