Предлагаемое изобретение относится к машиностроению и предназначено для преобразования вращения ведущего вала в колебательное вращение ведомого вала с плавно измененяемым размахом колебания, что может быть использовано в нефрикционных высокомоментных вариаторах, объемных регулируемых гидравлических машинах и других устройствах.
Известны колебательные механизмы с плавно изменяемой амплитудой ведомого вала, например рычажный механизм [1], который достаточно громоздкий и динамически не уравновешенный. Колебательные механизмы, применяемые в высокомоментных вариаторах, например [3, 4], используют поступательно перемещаемые каретки или кулачки, что усложняет конструкцию.
Примем за прототип наиболее близкий по технической сущности и достигаемому результату колебательный механизм [2], содержащий рукоятку управления, установленные на подшипниках корпуса ведущий и ведомый валы, а также устройство преобразования однонаправленного вращения ведущего вала в колебательное вращение ведомого вала с возможностью изменения от рукоятки управления размаха колебания, включающее в себя смонтированную на ведущем валу с возможностью поворота от рукоятки управления косынку, установленный на цапфах ведомого вала наклонный кривошип, образующую с наклонным кривошипом вращательно-поступательную пару и шарнирно связанную с косынкой кулису.
Признаки известного механизма (прототипа), совпадающие с заявляемым изобретением, следующие. Известный механизм содержит рукоятку управления, установленные на подшипниках корпуса ведущий и ведомый валы, а также устройство преобразования однонаправленного вращения ведущего вала в колебательное вращение ведомого вала с возможностью изменения от рукоятки управления размаха колебания, включающее в себя установленный на цапфах ведомого вала кинематически связанный с ведущим валом наклонный кривошип.
Известный механизм имеет сложную и сильно нагруженную кинематическую связь рукоятки управления с косынкой. Необходимое для изменения угла наклона косынки усилие сопоставимо рабочему моменту на выходном валу, максимальный размах колебаний λmax колебательного вала этого вариатора ограничен углом давления кулисы на наклонный кривошип, поэтому λmax≤60°, что уменьшает диапазон передаточных отношений вариатора.
Цель предлагаемого изобретения - повышение эксплутационных характеристик, упрощение и удешевление конструкции.
Предлагаемый колебательный механизм имеет следующие существенные признаки. Он содержит рукоятку управления, установленные на подшипниках корпуса ведущий и ведомый валы, а также устройство преобразования однонаправленного вращения ведущего вала в колебательное вращение ведомого вала с возможностью изменения от рукоятки управления размаха колебания, включающее в себя смонтированное в корпусе с возможностью поворота от рукоятки управления коническое зубчатое колесо, установленный в цапфах ведомого вала наклонный кривошип, выполненное на ведущем валу водило, а также посаженный на водило, шарнирно связанный с наклонным кривошипом и образующий с коническим зубчатым колесом внутреннее зацепление сателлит, с числом зубьев в два раза меньшим, чем на колесе.
Отличительными от прототипа признаками изобретения являются следующие. Предлагаемый механизм для высокомоментного вариатора снабжен выполненным на ведущем валу водилом и смонтированным в корпусе с возможностью поворота от рукоятки управления коническим зубчатым колесом, а также установленным на водило, шарнирно связанным с наклонным кривошипом и образующим с зубчатым коническим колесом внутреннее зацепление сателлитом с числом зубьев в два раза меньшим, чем на колесе.
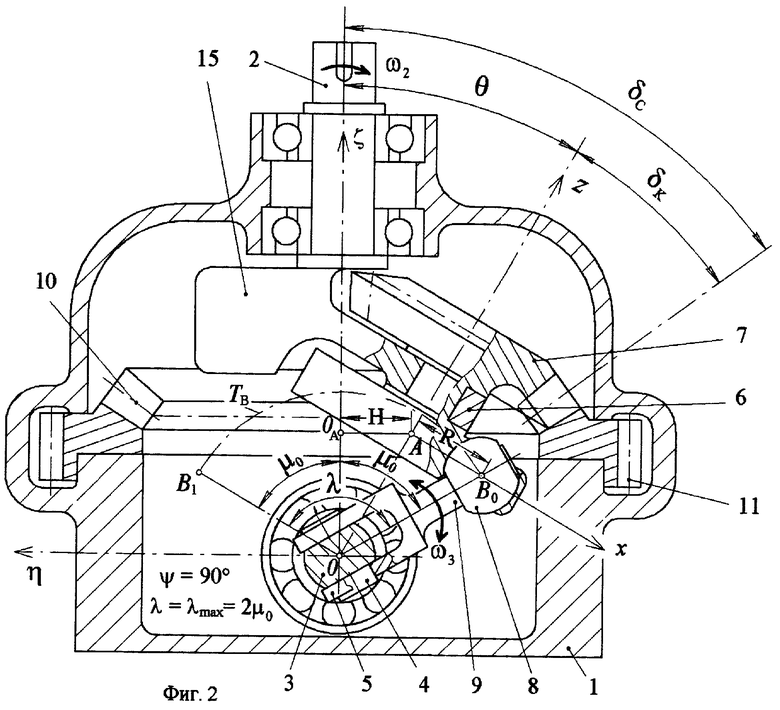
На фиг.1 и 2 дана конструкция предлагаемого механизма при крайних положениях рукоятки управления, на фиг.3 и 4 - расчетные кинематические схемы механизма, на фиг.5-7 - конструкция васокомоментного вариатора, на фиг.8 - скорости звеньев вариатора.
Предлагаемый механизм (фиг.1 и 2) содержит корпус 1, установленные на подшипниках корпуса ведущий 2 и ведомый 3 валы. На ведомом валу 3 на цапфы 4 посажен наклонный кривошип 5. Ведущий вал 2 выполнен с водилом 6, на котором установлен сателлит 7, снабженный шарниром 8, образующим вращательно-поступательную пару с цилиндрическим пальцем 9 наклонного кривошипа. В корпусе с возможностью поворота смонтировано коническое зубчатое колесо 10, образующее с сателлитом внутреннее зацепление. Число зубьев сателлита в два раза меньше, чем у колеса. Коническое зубчатое колесо 10 выполнено с зубчатым венцом 11, сцепленным с шестерней 12, связанной валом 13 с рукояткой управления 14. Ведущий вал снабжен противовесом 15.
Свяжем с коническим зубчатым колесом 10 систему декартовых координат 0ξηζ, а с сателлитом 7 - Axz, z - ось вращения сателлита относительно водила 6, ось х проходит через центр В шарнира 8. Рукоятка управления 14 обеспечивает поворот зубчатого конического колеса вокруг оси ζ на угол ψ, образованный осью η с осью ведомого вала w, на фиг.1 - ψ=0, а на фиг.2 - ψ=90°, что соответствует двум крайним положениям рукоятки управления.
Конструктивные параметры механизма: θ - угол наклона оси z (угол нутации); Н - расстояние центра А от оси ζ; R=АВ.
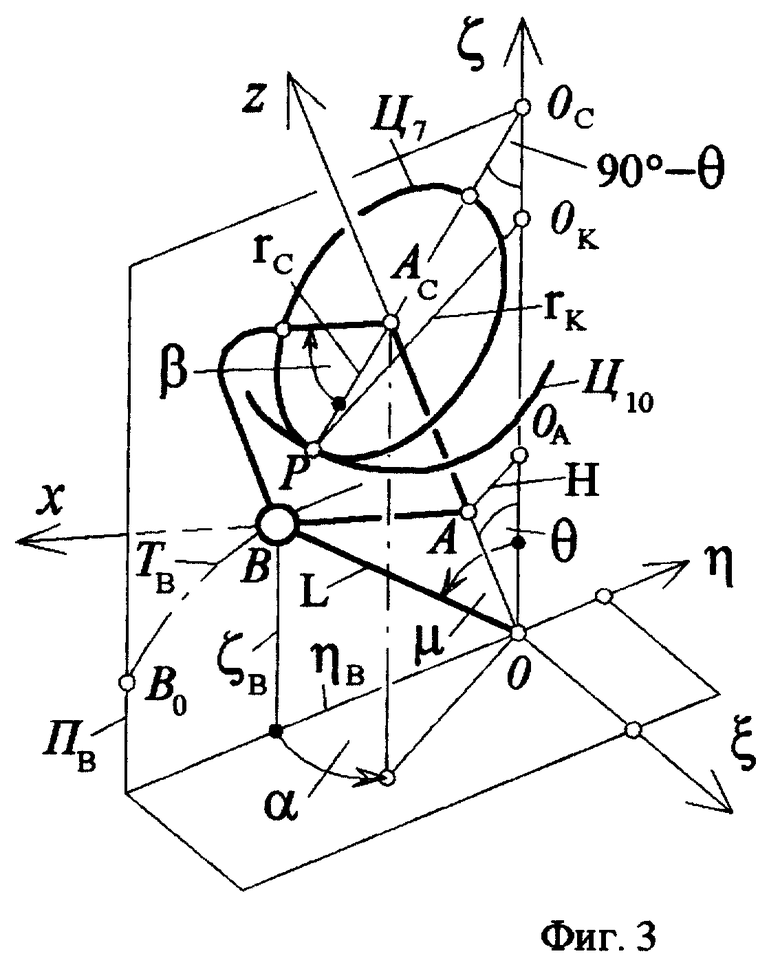
Механизм действует следующим образом (фиг.1-4). От вращающегося ведущего вала 2 посредством водила 6 перемещается ось z сателлита 7, который совершает качение по зубчатому коническому колесу 10. Вместе с сателлитом перемещается шарнир 8, от которого посредством наклонного кривошипа 5, воздействующего на цапфы 4, поворачивается ведомый вал 3. На фиг.3 и 4 П4 - плоскость, в которой поворачиваются оси цапф.
Размах колебаний ведомого вала равен λ, зависит от ψ и может плавно изменяться (варьироваться) рукояткой управления 14 от λmin при ψ=0 (фиг.1) до λmax=2μ0 при ψ=90° (фиг.2), где амплитуда колебания наклонного кривошипа

Мгновенные оси вращения сателлита образуют конические аксоиды: подвижный на сателлите и неподвижный на зубчатом коническом колесе. Р - полюс зацепления на торце сателлита, а геометрические места точек Р являются центроидами: подвижной Ц7 и неподвижной Ц10 (фиг.3). Радиусы центроид колеса rк и сателлита rс связаны соотношением

Траектория Tв перемещения центра В шарнира 8 зависит от параметров механизма, а также от вида конических аксоид, используемых для нарезания зубьев, т.е. от углов δс и δк между образующими конусов (мгновенные оси вращения) и осями ζ и z соответственно. Координаты B в системе 0ξηζ:

где α и β - углы поворота ведущего вала (водила) и сателлита (относительно оси z), связанные условием качения

Рассмотрим вариант конструкции механизма, обеспечивающего λmin=0.
В этом случае необходимым условием является перемещение центра шарнира B в плоскости 0ηζ (Пв на фиг.3 и 4), т.е. в системе уравнений (3)

где R=H/cosθ.
Из (5) следует


а из условия (2) и (4)

при этом, обозначив число зубьев сателлита и зубчатого конического колеса Zc и Zk, из (6) имеем Zk=2Zc.
Угол отклонения оси цилиндрического пальца 9 наклонного кривошипа μ(α) от оси 0ζ (фиг.4)

а угол поворота ведомого вала γ(а) зависит от ψ и, как следует из фиг.4, связан с μ соотношением

Такая конструкция обеспечивает λmin=0 при ψ=0 и при ψ=90°

Скорость ведомого вала равна

где ω2 - скорость ведущего вала.
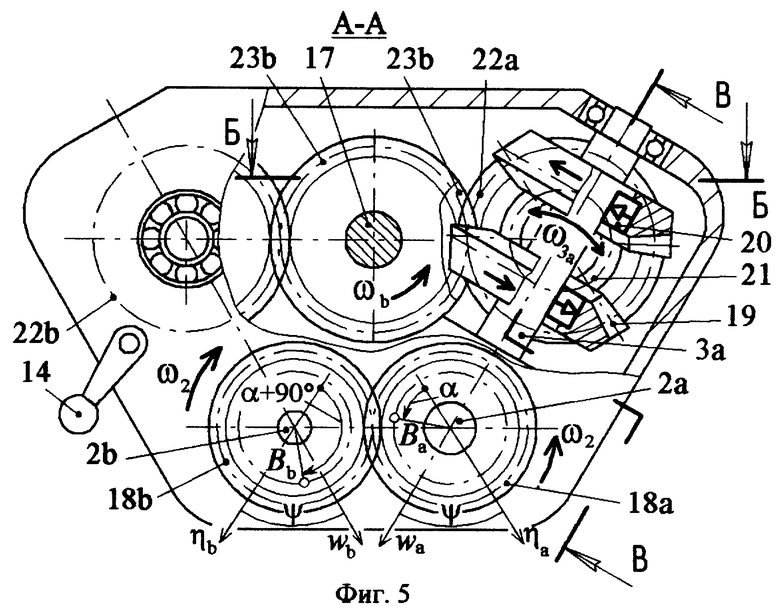
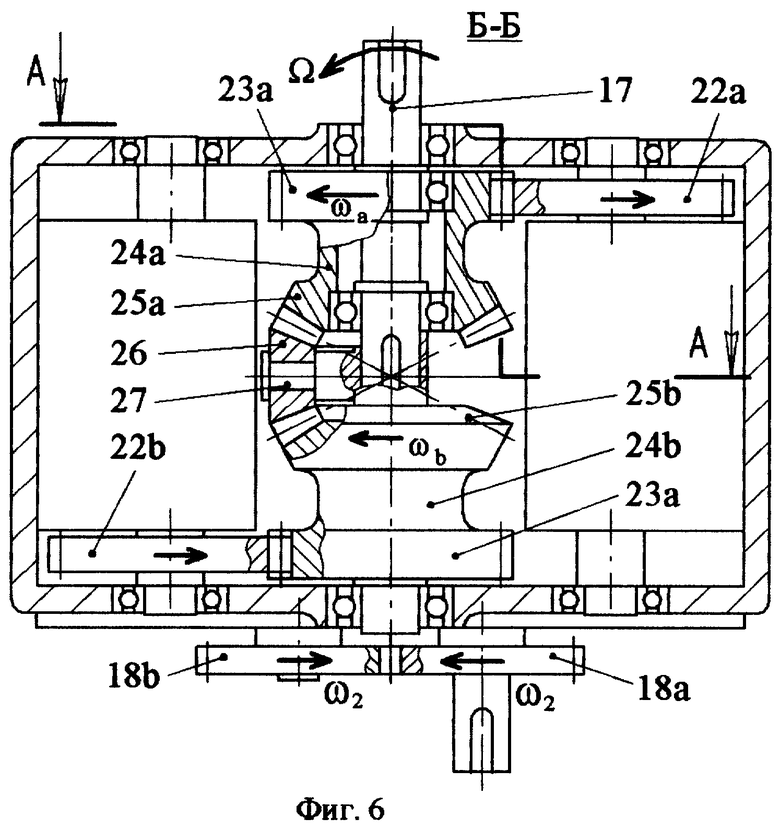
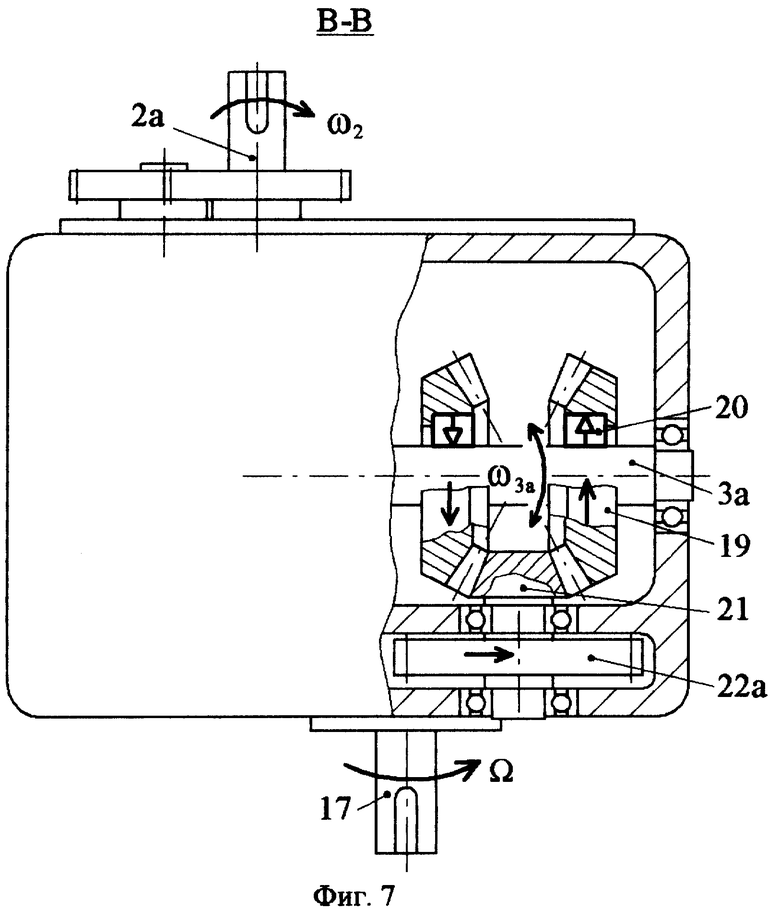
Пример применения изобретения в высокомоментном вариаторе показан на фиг.5-7, где применены два колебательных механизма "а" и "b", действующие с относительным фазовым сдвигом 90°, аналогично [3, 4]. Ведущий вал 2а колебательного механизма "а" является входным валом вариатора, а вал 17 - выходным. Валы 2а и 2b связаны зубчатыми колесами 18а и 18b. Колебательные механизмы снабжены выпрямителями. Каждый выпрямитель содержит пару конических колес 19, являющихся ведомыми полумуфтами обгонных муфт 20, ведущие полумуфты которых смонтированы на ведомых валах 3. Пара колес 19 через коничку 21 и шестерню 22 связана с колесом 23 ступицы 24 конического дифференциала. Ведомый вал 3 является входным звеном выпрямителя, а шестерня 22 - выходным. Конический дифференциал содержит выполненные на ступицах 24 конические колеса 25, сцепленные с сателлитом дифференциала 26, водило 27 которого закреплено на выходном валу 17 вариатора.
Высокомоментный вариатор работает следующим образом. От вращающегося ведущего вала 2а колебательное движение передается на ведомые валы 3, скорости которых сдвинуты по фазе на 90°. Далее посредством выпрямителей ступицам 24 конического дифференциала сообщается однонаправленное вращение с угловыми скоростями ωа(α) и ωb(α)=ωa(α+90°),
где, обозначая Zi число зубьев i-го колеса, u=(Z19/Z21)(Z22/Z23). Следовательно, скорость выходного вала вариатора составит без учета обгонного действия обгонных муфт

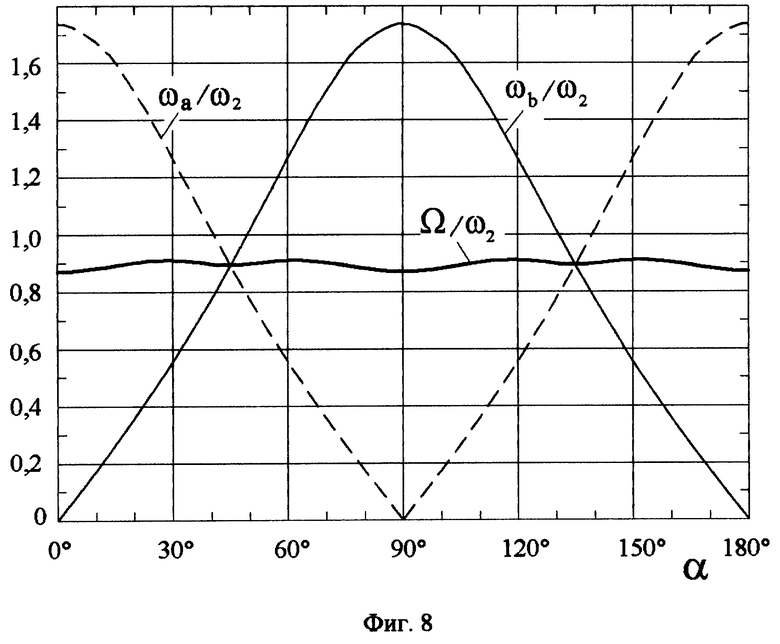
На фиг.8 показаны относительные скорости звеньев вариатора при θ=42°, Н=1, ψ=90° и u=1, где видно, что скорость вращения Ω выходного вала имеет достаточно высокую равномерность, следовательно, данный тип вариатора по этой характеристике сопоставим с кулачковыми вариаторами [3, 4], но при этом конструктивно проще.
Рассмотрим вариант конструкции предлагаемого колебательного механизма с круглыми центроидами, т.е. с δс=const и δк=const, при этом β=2α, и, как следствие, ξв≠0, следовательно, λmin≠0.
Например, при θ=30° и R=0,76 Н, имеем

а из (1)

Рассмотренный вариант колебательного механизма конструктивно проще конструкции, рассмотренной выше, его применение в высокомоментном вариаторе возможно, но при этом не обеспечивается работа вариатора при "стоп-режиме".
Длина наклонного кривошипа
 следовательно, угол давления шарнира на наклонный кривошип равен нулю, что не имеет место в прототипе [2], поэтому потери на трение в предлагаемом механизме меньше и возможен больший угол λ размаха колебания ведомого вала.
следовательно, угол давления шарнира на наклонный кривошип равен нулю, что не имеет место в прототипе [2], поэтому потери на трение в предлагаемом механизме меньше и возможен больший угол λ размаха колебания ведомого вала.
Выполненная подвижной в осевом направлении связь цилиндрического пальца 9 с шарниром 8 является избыточной в рассмотренном примере конструкции. Однако применение дополнительной подвижности позволит компенсировать деформации механизма при его работе, а также неточности изготовления и сборки.
Источники информации
1. А.А.Благонравов. Механические бесступенчатые передачи нефрикционного типа. М.: Машиностроение, 1977, стр.52, рис.18.
2. Патент РФ №2207463 С2, F 16 Н 23/04. Механизм с качающейся шайбой. / Автор: Пылаев Б.В. Приор. 06.03.2001.
3. Патент ФРГ №3309044, F 16 Н 29/08. Stufenlos regelbares, mechanisches Schaltwerksgetribe / Anmelder Rindfleisch В.- Anmeldetag: 14.03.1983.
4. Патент РФ №2212574 С2, F 16 Н 29/08. Высокомоментный вариатор. / Автор: Пылаев Б.В. Приор. 19.11.2001.

Изобретение относится к области машиностроения, в частности к механизмам для преобразования вращения ведущего вала в колебательное вращение ведомого вала с плавно измененяемой амплитудой, и может быть использовано в нефрикционных вариаторах, объемных регулируемых гидравлических машинах и других устройствах. Механизм содержит рукоятку управления, установленные на подшипниках корпуса ведущий и ведомый валы, а также устройство преобразования однонаправленного вращения ведущего вала в колебательное вращение ведомого вала с возможностью изменения от рукоятки управления размаха колебания, включающее в себя установленный в цапфах ведомого вала кинематически связанный с ведущим валом наклонный кривошип. Механизм снабжен выполненным на ведущем валу водилом и смонтированным в корпусе с возможностью поворота от рукоятки управления коническим зубчатым колесом, а также установленным на водиле, шарнирно связанным с наклонным кривошипом и образующим с зубчатым коническим колесом внутреннее зацепление сателлитом, с числом зубьев в два раза меньшим, чем на колесе. Технический результат заключается в повышении эксплуатационных характеристик, упрощении и удешевлении конструкции. 8 ил.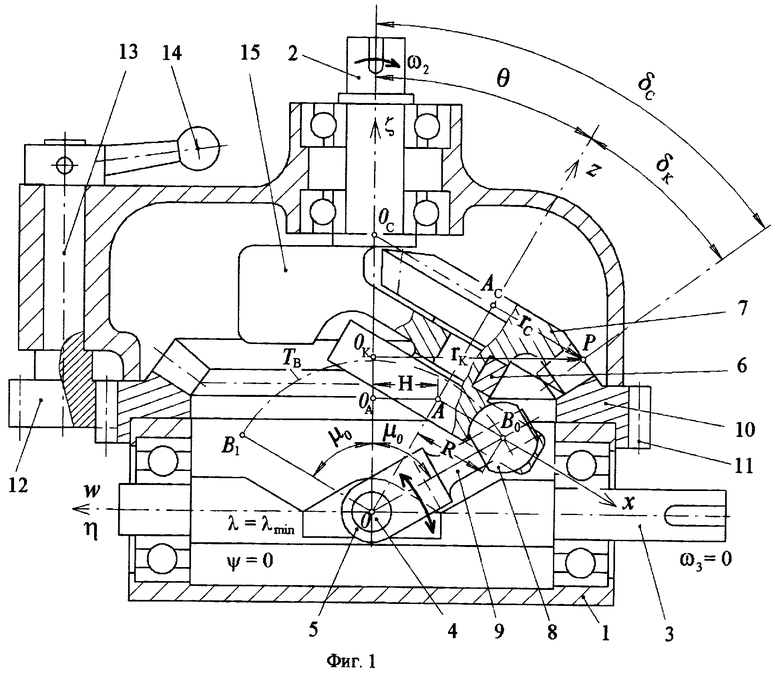
Колебательный механизм для высокомоментного вариатора, содержащий рукоятку управления, установленные на подшипниках корпуса ведущий и ведомый валы, а также устройство преобразования однонаправленного вращения ведущего вала в колебательное вращение ведомого вала с возможностью изменения от рукоятки управления размаха колебания, включающее в себя установленный в цапфах ведомого вала, кинематически связанный с ведущим валом наклонный кривошип, отличающийся тем, что снабжен выполненным на ведущем валу водилом и смонтированным в корпусе с возможностью поворота от рукоятки управления коническим зубчатым колесом, а также установленным на водиле, шарнирно связанным с наклонным кривошипом и образующим с зубчатым коническим колесом внутреннее зацепление сателлитом с числом зубьев в два раза меньшим, чем на колесе.
| МЕХАНИЗМ С КАЧАЮЩЕЙСЯ ШАЙБОЙ | 2001 |
|
RU2207463C2 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2001 |
|
RU2212574C2 |
| DE 3309044 A1, 20.09.1984. | |||

