Родственная заявка
Данная заявка имеет приоритет на основе предварительной заявки на патент США 60/293 616, поданной 25 мая 2001.
Предпосылки создания изобретения
Область техники, к которой относится изобретение
В соответствии с одним аспектом изобретение относится к подвеске с продольными рычагами, предназначенной для транспортного средства. В соответствии с другим аспектом изобретение относится к системе регулирования высоты, предназначенной для регулирования высоты подвески относительно транспортного средства при движении. В соответствии с еще одним аспектом изобретение относится к системе регулирования высоты с приводом от двигателя.
Предшествующий уровень техники
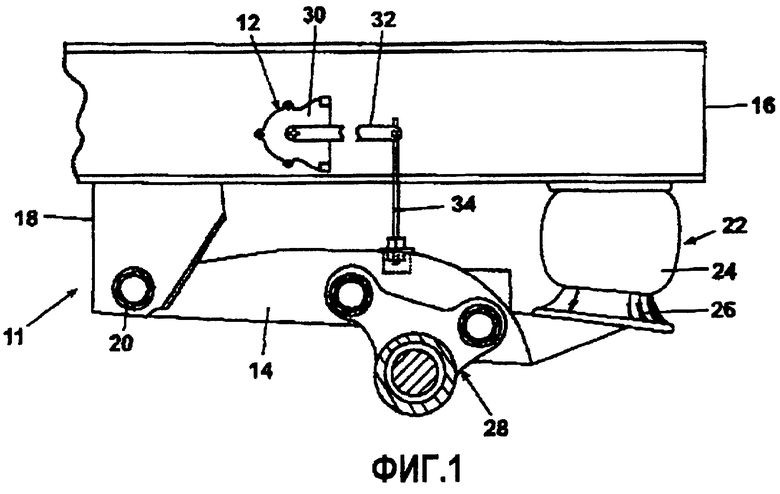
Подвески с продольными рычагами, выполненные с механически присоединенными и механически приводимыми клапанами механизма регулировки высоты, хорошо известны. На фиг.1 показана такая подвеска 10 с продольными рычагами в сочетании с клапаном 12 механизма регулировки высоты. Подвеска 10 с продольными рычагами включает противолежащие узлы 11, содержащие продольные рычаги и закрепленные на противоположных сторонах транспортного средства, предпочтительно на продольных балках 16 рамы транспортного средства. Каждый из узлов, содержащих продольные рычаги, включает продольный рычаг 14, имеющий один конец, соединенный с возможностью поворота с подвесным кронштейном 18 посредством поворотного соединения 20. Подвесной кронштейн подвешен к продольной балке 16 рамы транспортного средства. Другой конец продольного рычага 14 прикреплен к пневматической рессоре 22, которая прикреплена к продольной балке 16 рамы. Пневматическая рессора 22 демпфирует поворот продольного рычага 14 относительно подвесного кронштейна 18 и относительно продольной балки 16 рамы.
Мост 28, как правило, соединяет продольные рычаги 14 и прикреплен к продольным рычагам 14, или, другими словами, продольные рычаги 14 служат опорой мосту 28. На мосте 28 с возможностью поворота установлены колеса (непоказанные), входящие в контакт с грунтом. Любое движение колес, вызванное их контактом с грунтом, приводит к повороту продольных рычагов 14, которому препятствуют пневматические рессоры 22.
Пневматические рессоры 22, как правило, содержат емкость 24 для воздуха и поршень 26. Поршень 26 прикреплен к продольному рычагу 14, а емкость 24 для воздуха обеспечивает соединение поршня с рамой. Текучая среда под давлением может быть введена или выпущена для регулирования характеристик демпфирования, обеспечиваемых пневматической рессорой. Кроме того, объем воздуха в пневматической рессоре можно регулировать для изменения высоты продольных балок рамы относительно продольных рычагов. Часто имеется предпочтительная или базовая высота при движении прицепа, и в зависимости от груза, перевозимого прицепом, или от внешних условий эксплуатации, фактическая или текущая высота при движении может изменяться со временем. Сжатый воздух вводят в емкости для воздуха или выпускают из емкостей для воздуха с целью регулирования высоты продольной балки рамы прицепа относительно продольных рычагов для поддержания высоты при движении на уровне базовой высоты для определенной нагрузки или условий окружающей среды.
Регулировку высоты при движении выполняют с помощью клапана 12 механизма регулировки высоты, который имеет впускное отверстие, отверстие для соединения с пневматическими рессорами и выпускное отверстие. Впускное отверстие соединено по текучей среде с источником сжатого воздуха для транспортного средства. Отверстие для соединения с пневматическими рессорами соединено по текучей среде с емкостями 24 для воздуха, предусмотренными в пневматических рессорах, и выпускное отверстие сообщается по текучей среде с атмосферой. Клапан механизма регулировки высоты обеспечивает регулирование соединения по текучей среде между отверстием для соединения с пневматическими рессорами, впускным отверстием и выпускным отверстием для введения воздуха в пневматическую рессору или выпуска воздуха из пневматической рессоры, чтобы тем самым регулировать высоту транспортного средства.
Клапан механизма регулировки высоты, как правило, прикреплен к раме 16 транспортного средства и имеет выполненный с возможностью поворота рычаг 32, который соединен в рабочем положении с продольным рычагом 14 посредством регулируемого стержня 34, в результате чего любое перемещение продольного рычага 14 приводит к соответствующему перемещению рычага 32, вызывающему смещение клапана и соединение отверстия для соединения с пневматическими рессорами или с впускным отверстием, или с выпускным отверстием.
Традиционный клапан механизма регулировки высоты имеет три положения: положение надувания, нейтральное положение и положение выпуска. В положении надувания рычаг 32 повернут вверх, и отверстие, предназначенное для соединения с пневматическими рессорами, соединено с впускным отверстием. В нейтральном положении рычаг 32 является по существу горизонтальным, и отверстие, предназначенное для соединения с пневматическими рессорами, не соединено ни с впускным отверстием, ни с выпускным отверстием. В положении выпуска рычаг повернут вниз, и отверстие, предназначенное для соединения с пневматическими рессорами, соединено с выпускным отверстием.
Различные клапаны механизма регулировки высоты, имеющиеся в настоящее время, могут приводиться в действие с временной задержкой или могут мгновенно реагировать на изменения высоты. Конструкция клапана, предназначенная для данных клапанов, как правило, включает множество подпружиненных поршней или аналогичных элементов, которые герметично закрывают различные отверстия в ответ на относительное перемещение продольного рычага. Примеры данного типа клапана механизма регулировки высоты раскрыты в патенте США №5161579, выданном 10 ноября 1992, в патенте США №5560591, выданном 1 октября 1996, и в патенте США №5375819, выданном 27 декабря 1994.
Существует тенденция использования в этих клапанах уплотнения в виде уплотнительного кольца или т.п., которое окружает динамический или движущийся поршень для обеспечения уплотнения поршня относительно корпуса клапана. Эти "динамические" уплотнения подвержены износу, поскольку поршень совершает возвратно-поступательное перемещение, и этот износ в конце концов приводит к их разрушению.
К другим пригодным клапанам относятся клапаны без каких-либо динамических уплотнений. Группу таких клапанов называют золотниковыми клапанами, и они содержат соприкасающиеся пластины, одна из которых выполнена с возможностью смещения относительно другой. Пластины удерживаются вместе посредством сжатого воздуха из пневматической системы транспортного средства, что позволяет устранить необходимость в каких-либо динамических уплотнениях. Такой клапан раскрыт PCT/US00/23278, включенном в настоящее описание посредством ссылки.
Наиболее часто используемые в настоящее время современные клапаны механизма регулировки высоты, независимо от их конструкции, подвержены повреждениям вследствие наличия механического соединения между продольным рычагом и клапаном механизма регулировки высоты. Механическое соединение открыто для непосредственного воздействия среды, окружающей подвеску с продольными рычагами, которая может быть очень неблагоприятной. Кроме того, большинство клапанов с механическим приводом подвержены «заеданию» в случае нерегулярного использования.
С целью преодоления недостатков, выполненных с механическим приводом и управлением клапанов механизма регулировки высоты, были разработаны системы регулирования высоты с электронным управлением и приводом. Системы на основе электроавтоматики образуют небольшой сегмент рынка клапанов механизма регулировки высоты. В этих системах с электронным управлением, как правило, используются различные датчики для мониторинга положения транспортного средства по высоте и используются клапаны с электрическим приводом, такие как электромагнитные клапаны, для регулирования введения воздуха в пневматические рессоры и выпуска воздуха из пневматических рессор. Недостатком систем с электронным управлением является то, что они являются значительно более дорогостоящими по сравнению с механическими системами с точки зрения стоимости компонентов, эксплуатационных расходов и издержек производства. Однако они являются предпочтительными за счет того, что для них характерна тенденция в большей степени реагировать на изменения высоты транспортного средства.
Таким образом, по-прежнему существует потребность в такой системе регулирования высоты транспортного средства, которая обеспечила бы сочетание низкой стоимости, характерной для традиционных механических систем, и рабочих характеристик, присущих электронным системам.
Сущность изобретения
Предложена система регулирования высоты при движении, предназначенная для подвески, которая служит опорой мосту, который несет контактирующие с грунтом колеса относительно транспортного средства. Система регулирования высоты при движении обеспечивает поддержание базовой высоты транспортного средства относительно грунта при движении транспортного средства. Подвеска содержит датчик высоты, который определяет текущую высоту транспортного средства при его движении и генерирует выходной сигнал, характеризующий текущую высоту при движении. Надувная емкость для воздуха подсоединена в рабочем положении между мостом и транспортным средством, в результате чего введение воздуха в емкость для воздуха и выпуск воздуха из емкости для воздуха вызывают соответственно увеличение и уменьшение относительного расстояния между мостом и транспортным средством для регулирования высоты транспортного средства при движении. Предусмотрен источник сжатого воздуха, предназначенный для использования при надувании емкости для воздуха. Клапан обеспечивает избирательное соединение по текучей среде между емкостью для воздуха и источником сжатого воздуха или атмосферой, чтобы тем самым осуществить соответственно введение воздуха в емкость для воздуха или выпуск воздуха из емкости для воздуха.
Система регулирования высоты при движении отличается наличием устройства, приводящего в действие клапан, которое соединено с датчиком высоты и с клапаном, при этом устройство, приводящее в действие клапан, получает в качестве входного сигнала выходной сигнал датчика высоты и избирательно приводит в действие клапан, обеспечивая его перевод в нейтральное положение, при котором емкость для воздуха не соединена по текучей среде ни с источником сжатого воздуха, ни с атмосферой, в положение наполнения, при котором емкость для воздуха соединена по текучей среде с источником сжатого воздуха для введения воздуха в емкость для воздуха, и в положение выпуска, при котором емкость для воздуха соединена по текучей среде с атмосферой для выпуска воздуха из емкости для воздуха. За счет соединения емкости для воздуха по текучей среде или с источником сжатого воздуха, или с атмосферой устройство, приводящее в действие клапан, обеспечивает для системы регулирования высоты при движении возможность регулирования высоты транспортного средства при движении относительно базовой высоты при движении.
Устройство, приводящее в действие клапан, предпочтительно содержит контроллер, который запрограммирован посредством управляющей логики. Контроллер использует выходной сигнал датчика высоты в сочетании с управляющей логикой для приведения в действие клапана с целью регулирования высоты при движении. Двигатель может быть снабжен устройством, приводящим в действие клапан, соединен в рабочем положении с контроллером и соединен с клапаном, в результате чего контроллер приводит в действие двигатель для избирательного приведения клапана в действие.
Двигатель предпочтительно включает выходное зубчатое колесо, которое введено в зацепление с передаточным зубчатым колесом, прикрепленным к кольцу клапана, так что приведение в действие двигателя вызывает поворот выходного зубчатого колеса, что приводит к повороту передаточного зубчатого колеса и тем самым к смещению клапана между положениями наполнения и выпуска. Двигатель предпочтительно является реверсивным, и контроллер приводит в действие двигатель в первом направлении для смещения клапана в положение наполнения и во втором направлении для смещения клапана в положение выпуска. Предпочтительно, чтобы выходное зубчатое колесо представляло собой червячное колесо.
Выходной сигнал датчика предпочтительно представляет собой сигнал напряжения, который "имеет" знак "плюс" или "минус", и контроллер использует знак сигнала напряжения для определения направления вращения двигателя. Управляющая логика такова, что контроллер предпочтительно поддерживает высоту транспортного средства при движении на уровне базовой высоты. Контроллер использует знак сигнала напряжения как указывающий на то, превышает ли высота транспортного средства при движении базовую высоту или она меньше базовой высоты.
Клапан предпочтительно имеет впускное отверстие, предназначенное для соединения с источником сжатого воздуха, отверстие для соединения с емкостью для воздуха, предназначенное для соединения по текучей среде с емкостью для воздуха, выпускное отверстие, предназначенное для соединения по текучей среде с атмосферой, и выполненный с возможностью поворота клапанный элемент, имеющий управляющий канал, который обеспечивает избирательное соединение отверстия, предназначенного для соединения с емкостью для воздуха, по текучей среде с впускным отверстием или выпускным отверстием при повороте клапанного элемента. Клапан также может иметь корпус клапана, который образует внутреннюю камеру, с которой соединены по текучей среде впускное отверстие, отверстие для соединения с емкостью для воздуха и выпускное отверстие.
Клапанный элемент может обеспечить отделение впускного отверстия от выпускного отверстия по текучей среде. При такой конфигурации сжатый воздух, поступающий в корпус из впускного отверстия, вызовет поджим клапанного элемента с вводом его в уплотняющий контакт с корпусом клапана.
Клапанный элемент предпочтительно представляет собой выполненный с возможностью поворота диск и может находиться на неподвижном диске, прикрепленном к корпусу. Выполненные с возможностью поворота и неподвижные диски предпочтительно выполнены из керамики или других аналогичных материалов.
Датчик высоты предпочтительно представляет собой измерительный преобразователь, такой как светолучевой датчик, конденсатор переменной емкости или переменный резистор.
В соответствии с другим аспектом изобретение относится к подвеске с регулируемой высотой, предназначенной для транспортного средства. Подвеска включает мост, который несет контактирующие с грунтом колеса, которые приспособлены для крепления их к транспортному средству с возможностью движения. Предусмотрен датчик высоты, который определяет текущую высоту транспортного средства при его движении и генерирует выходной сигнал, характеризующий текущую высоту при движении. Надувная емкость для воздуха подсоединена в рабочем положении между мостом и транспортным средством, в результате чего введение воздуха в емкость для воздуха и выпуск воздуха из емкости для воздуха вызывают соответственно увеличение и уменьшение относительного расстояния между мостом и транспортным средством для регулирования высоты транспортного средства при движении. Источник сжатого воздуха используется для надувания емкости для воздуха. Предусмотрен клапан, предназначенный для осуществления избирательного соединения по текучей среде между емкостью для воздуха и источником сжатого воздуха или атмосферой, чтобы тем самым обеспечить соответственно введение воздуха в емкость для воздуха или выпуск воздуха из емкости для воздуха.
Подвеска с регулируемой высотой отличается наличием устройства, приводящего в действие клапан, которое соединено с датчиком высоты и с клапаном, при этом устройство, приводящее в действие клапан, получает в качестве входного сигнала выходной сигнал датчика высоты и избирательно приводит в действие клапан, обеспечивая его перевод в нейтральное положение, при котором емкость для воздуха не соединена по текучей среде ни с источником сжатого воздуха, ни с атмосферой, в положение наполнения, при котором емкость для воздуха соединена по текучей среде с источником сжатого воздуха для введения воздуха в емкость для воздуха, и в положение выпуска, при котором емкость для воздуха соединена по текучей среде с атмосферой для выпуска воздуха из емкости для воздуха, и в результате этого обеспечивается регулирование высоты при движении на основе текущей высоты, определенной датчиком высоты.
Краткое описание чертежей
На чертежах:
фиг.1 представляет собой вертикальный вид сбоку подвески с продольными рычагами согласно предшествующему уровню техники, включающей известный клапан механизма регулировки высоты, выполненный с механическим регулированием и приводом;
фиг.2 - вертикальный вид сбоку подвески с продольными рычагами и с системой регулирования высоты согласно изобретению, включающей датчик высоты, соединенный посредством контроллера с выполненным с приводом от двигателя клапаном механизма регулировки высоты;
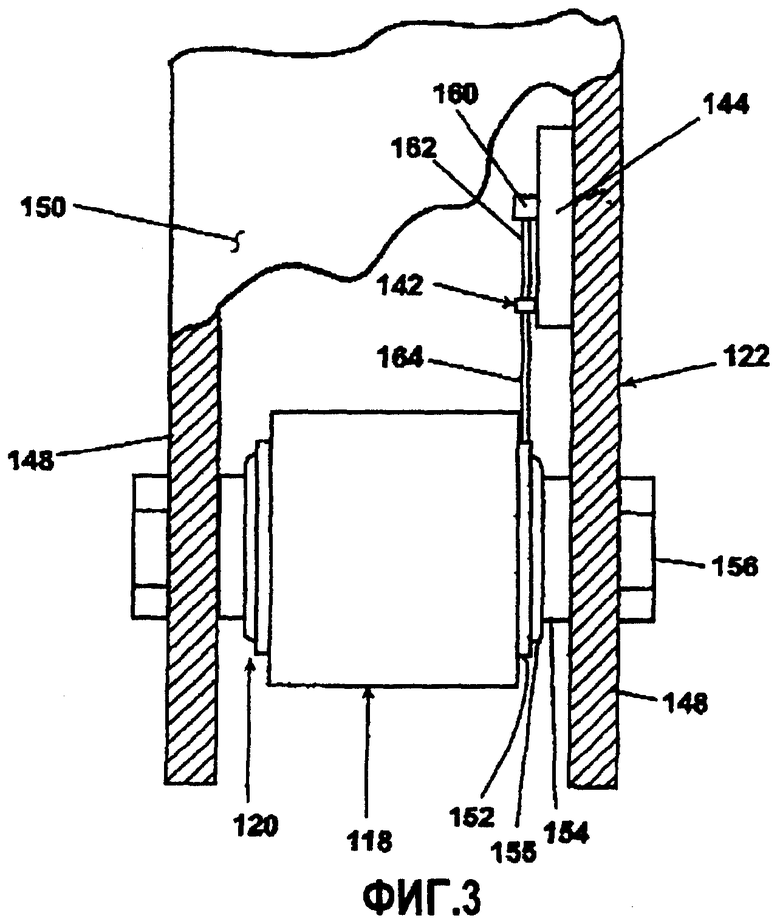
фиг.3 - выполненный с местным разрезом вид с торца по линии 3-3 на фиг.2, показывающий механическое соединение между датчиком высоты и подвеской с продольными рычагами;
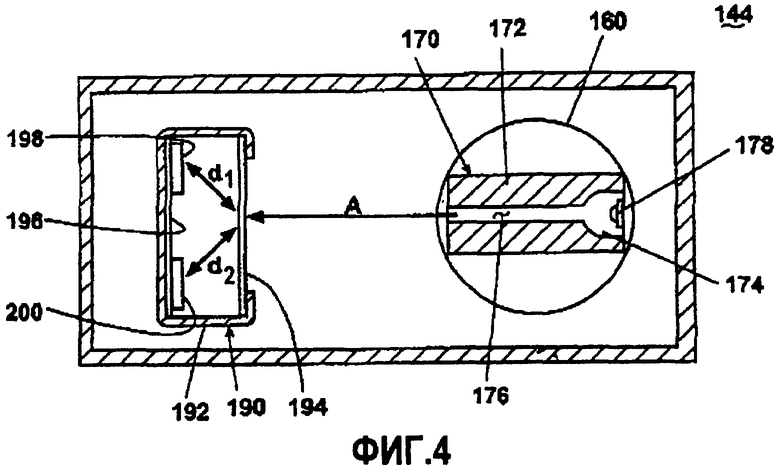
фиг.4 - сечение датчика по фиг.2 и 3, показывающее излучатель света для датчика в исходном положении относительно оптического измерительного моста устройства со светолучевыми датчиками;
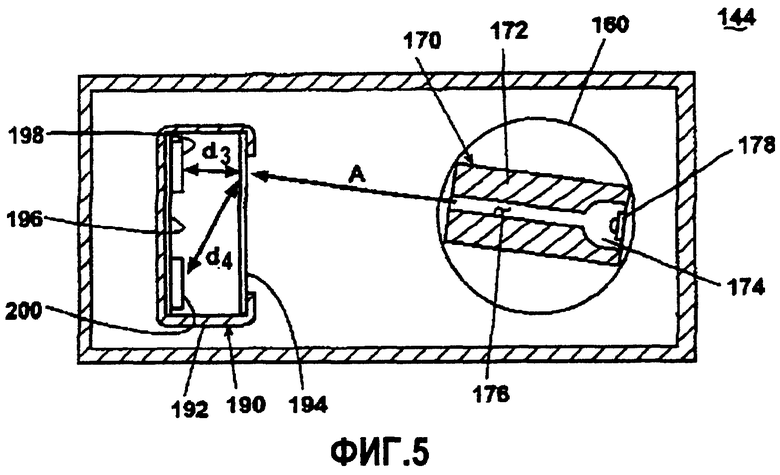
фиг.5 - идентична фиг.4 за исключением того, что излучатель света показан в альтернативном положении относительно оптического измерительного моста;
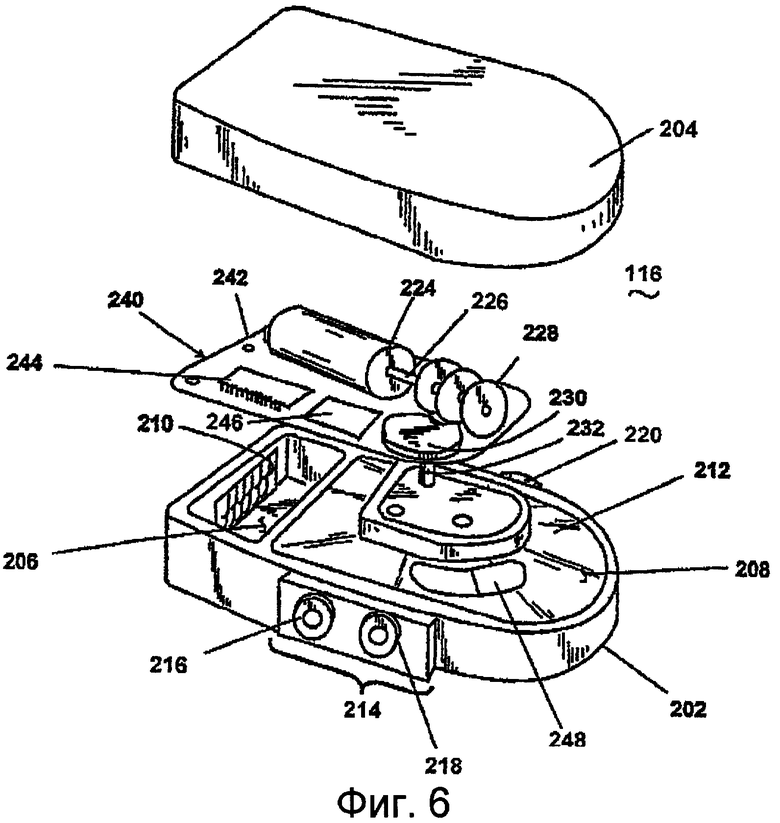
фиг.6 - вид в изометрии с пространственным разделением элементов, выполненный с приводом от двигателя клапана механизма регулировки высоты согласно изобретению, при этом часть корпуса удалена для ясности;
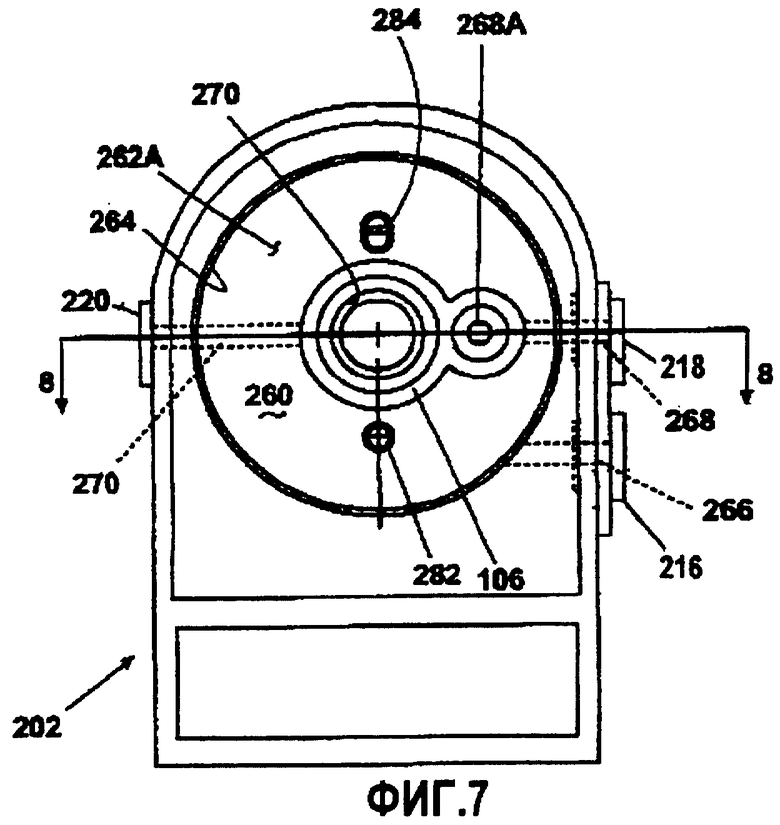
фиг.7 - вид сверху корпуса клапана механизма регулировки высоты по фиг.6, при этом крышка и клапанный узел удалены для ясности;
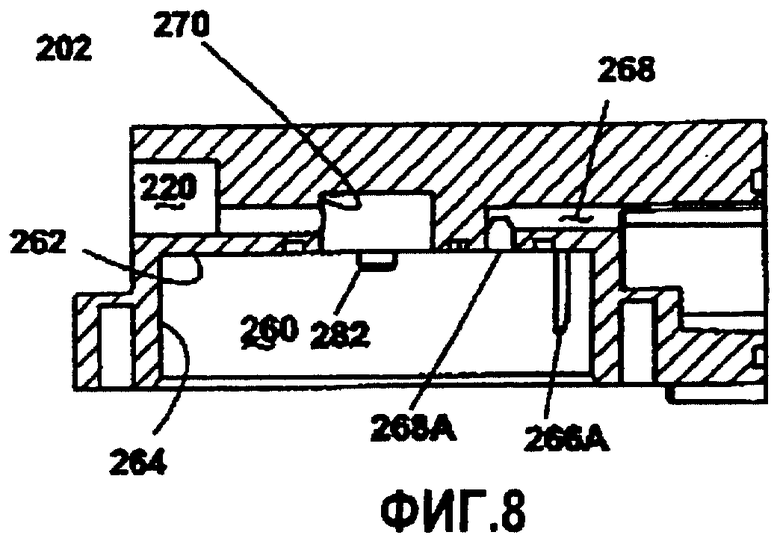
фиг.8 - сечение, выполненное по линии 8-8 на фиг.7, показывающее проточные каналы, проходящие через корпус;
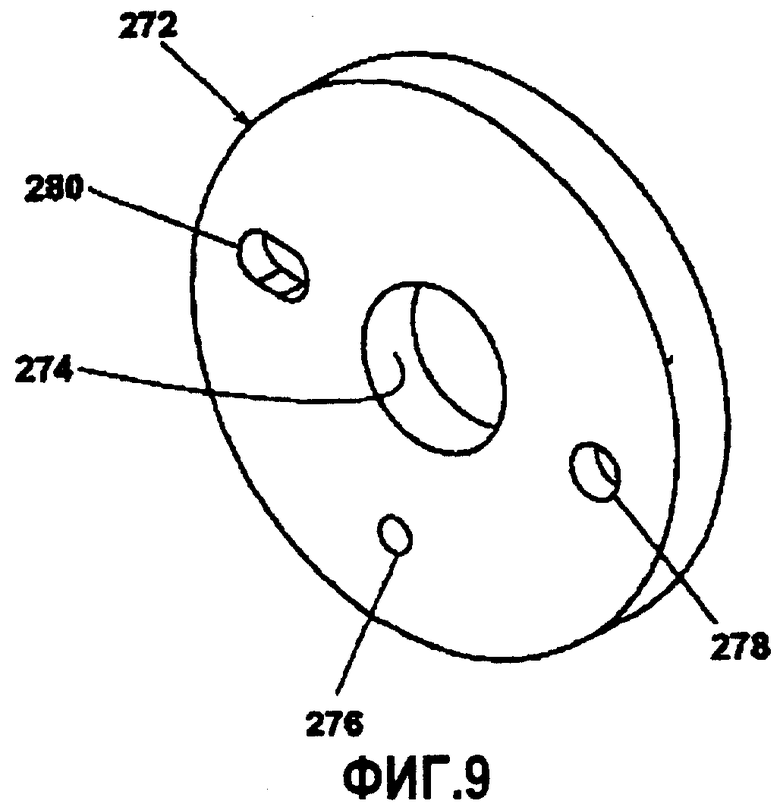
фиг.9 - увеличенный вид в изометрии стационарного золотникового диска клапанного узла по фиг.7;
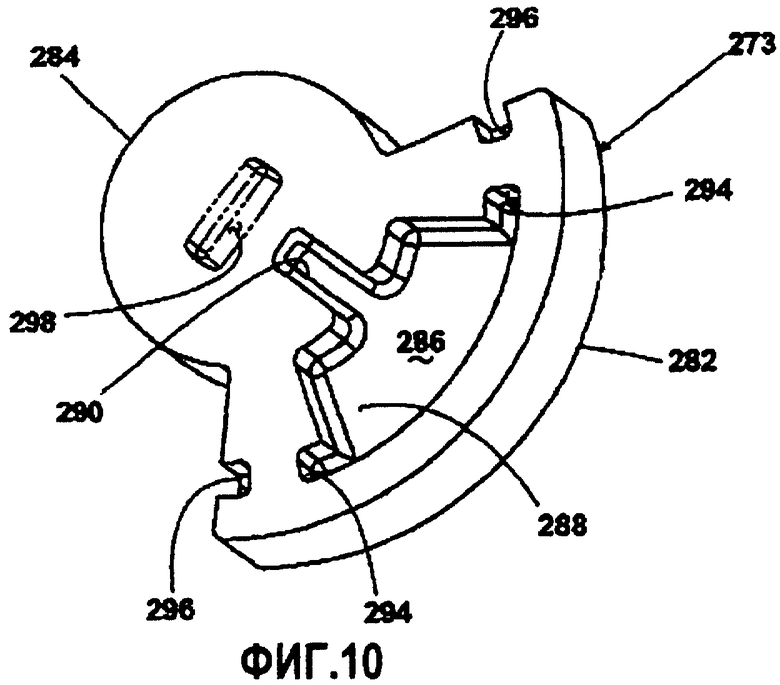
фиг.10 - вид в изометрии, показывающий динамический золотниковый диск клапанного узла по фиг.7;
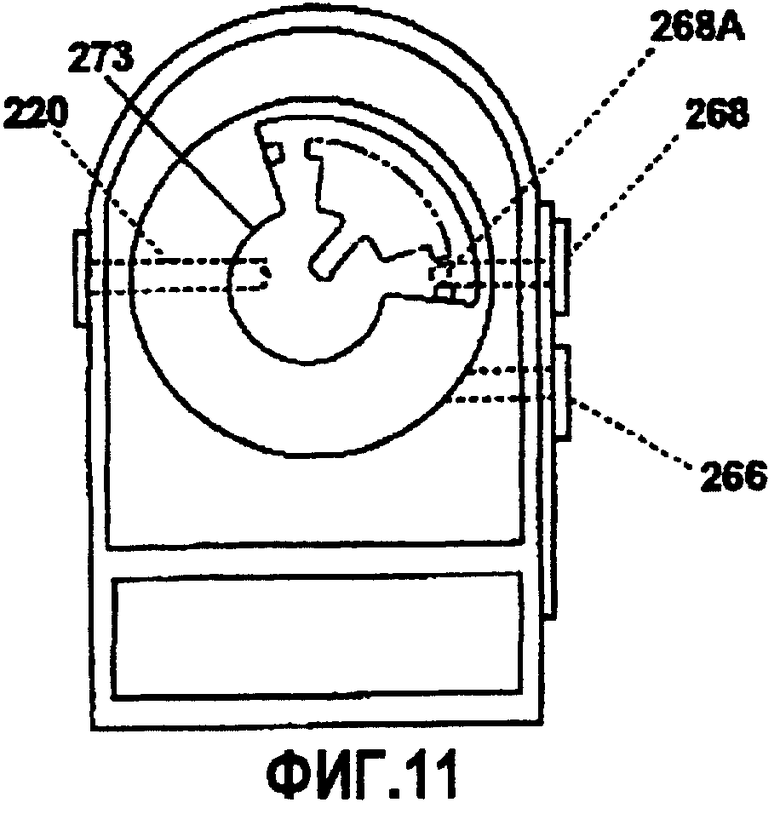
фиг.11 - схематичное изображение, показывающее клапан механизма регулировки высоты по фиг.7 в нейтральном положении;
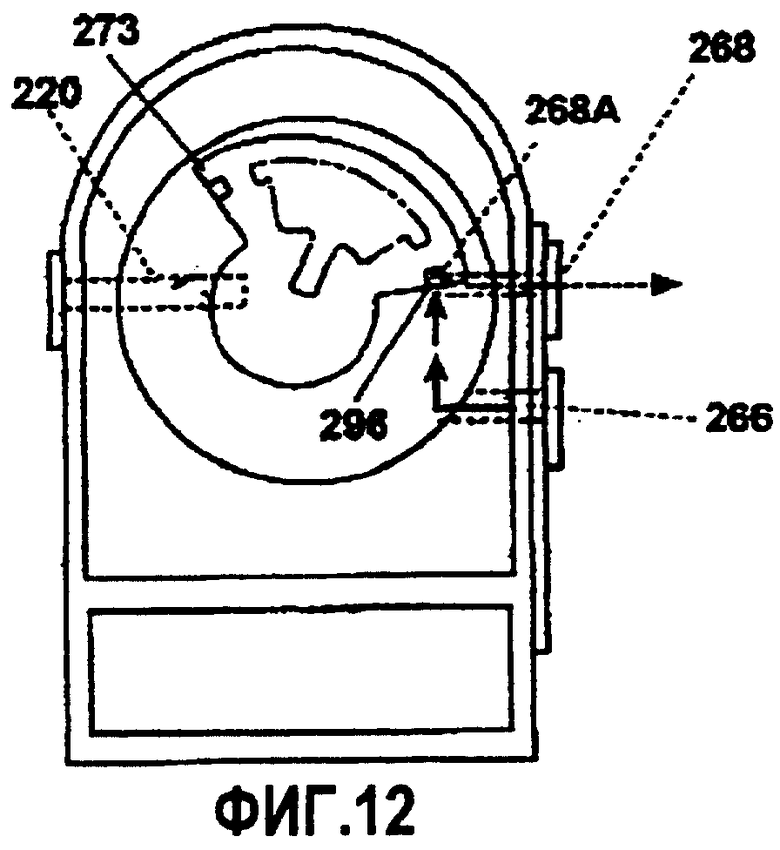
фиг.12 - схематичное изображение, показывающее клапан механизма регулировки высоты по фиг.7 в положении наполнения;
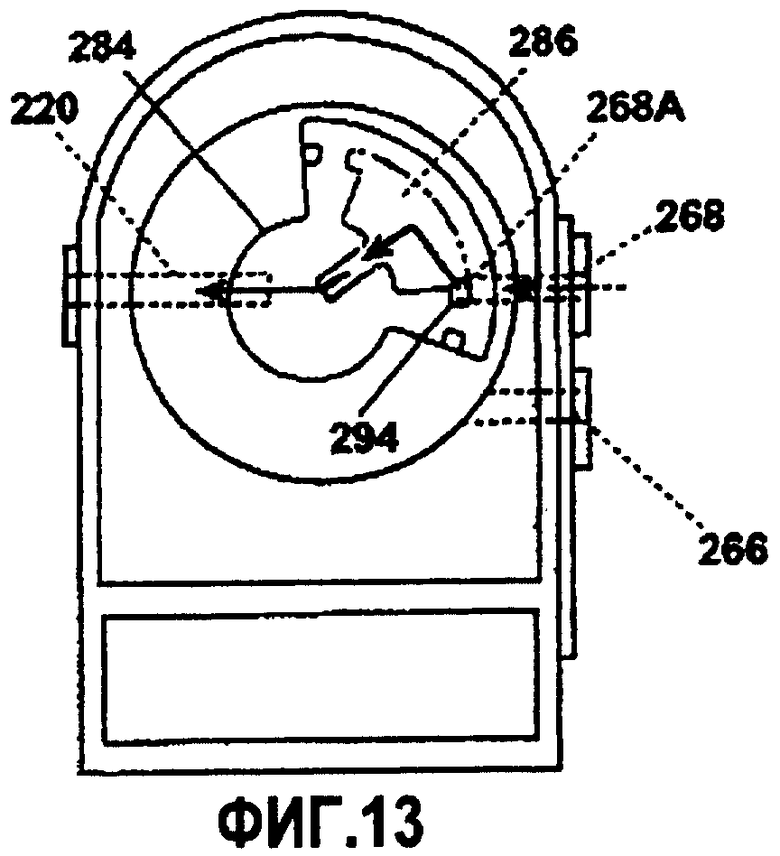
фиг.13 - схематичное изображение, показывающее клапан механизма регулировки высоты по фиг.7 в положении выпуска;
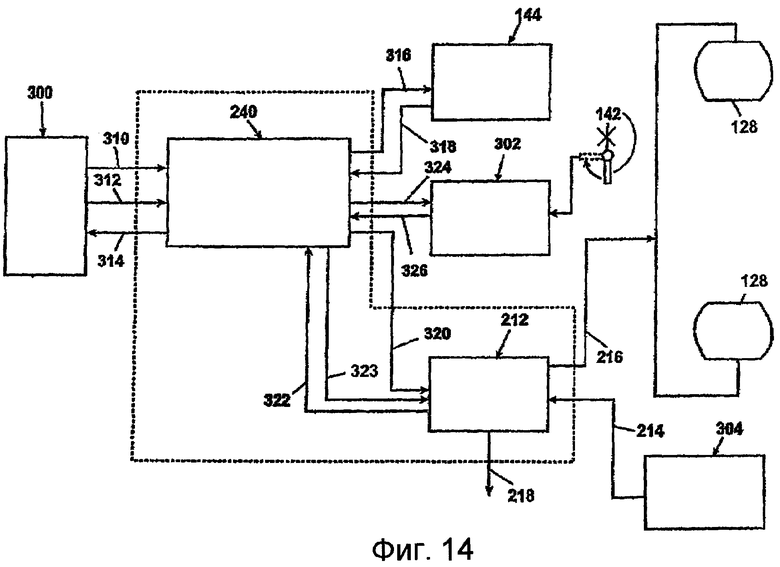
фиг.14 - блок-схему управления согласно изобретению;
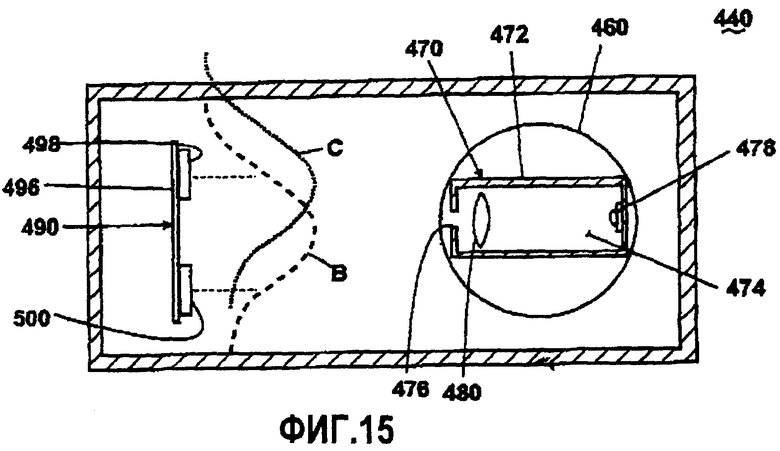
фиг.15 - датчик высоты по второму варианту осуществления изобретения;
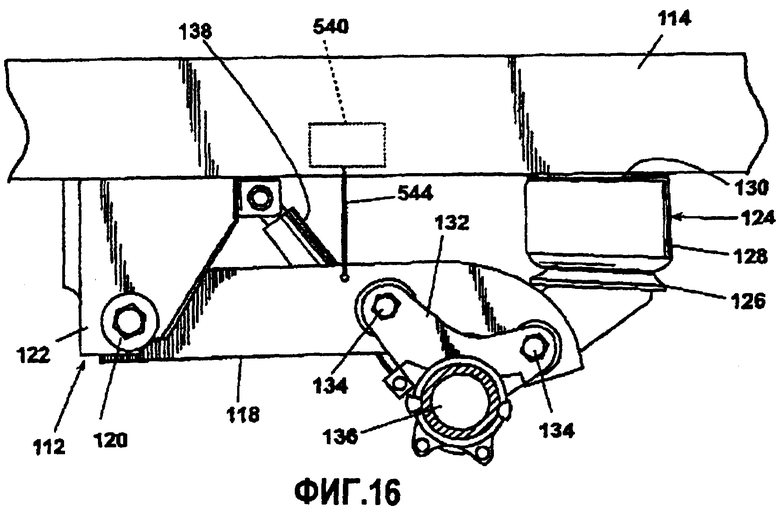
фиг.16 - подвеску с продольными рычагами, включающую датчик высоты по третьему варианту осуществления изобретения;
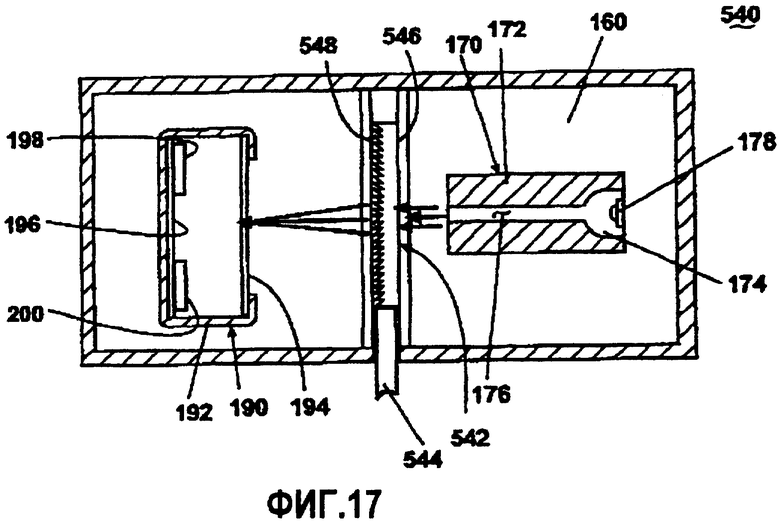
фиг.17 - сечение датчика высоты по третьему варианту осуществления изобретения;
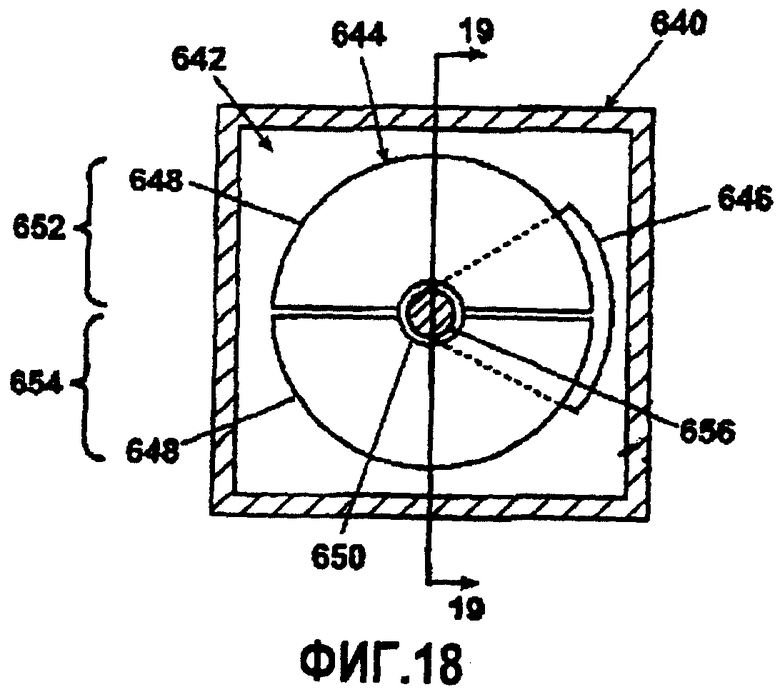
фиг.18 - сечение датчика высоты по четвертому варианту осуществления изобретения;
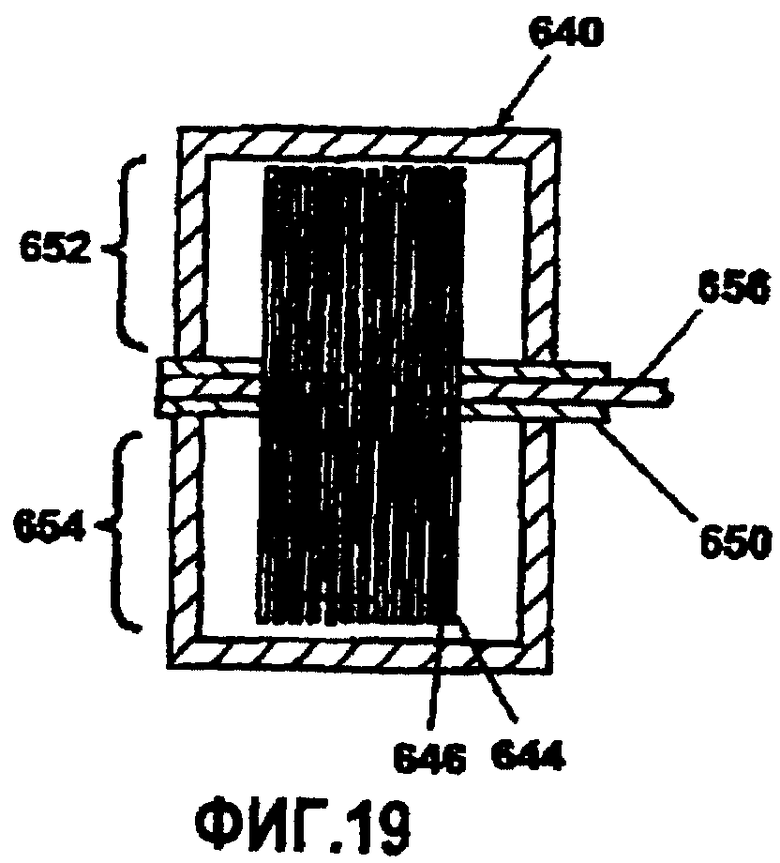
фиг.19 - сечение, выполненное по линии 19-19 на фиг.18 для датчика высоты по третьему варианту осуществления изобретения;
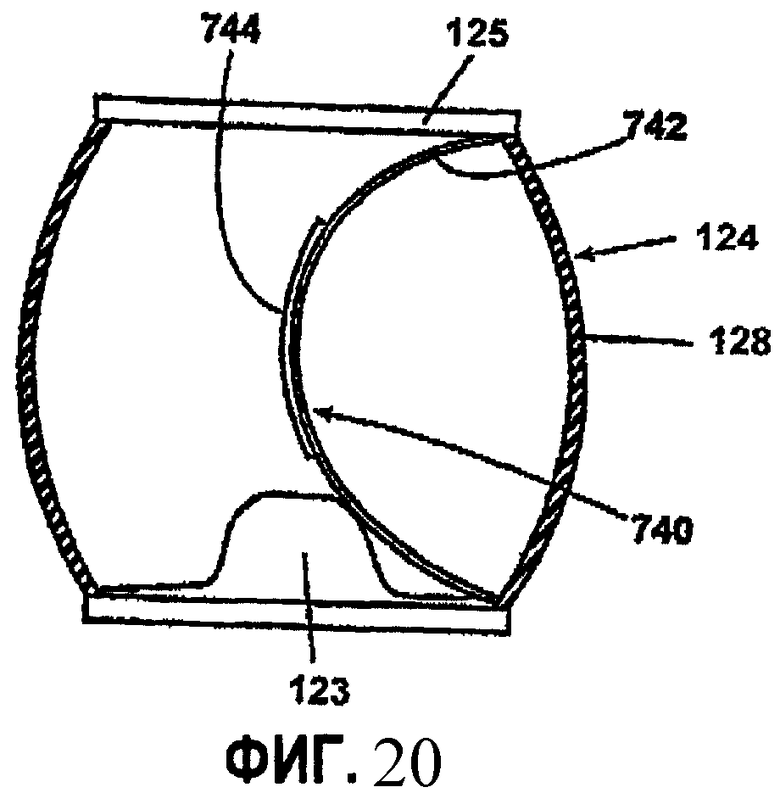
фиг.20 - датчик высоты по пятому варианту осуществления изобретения;
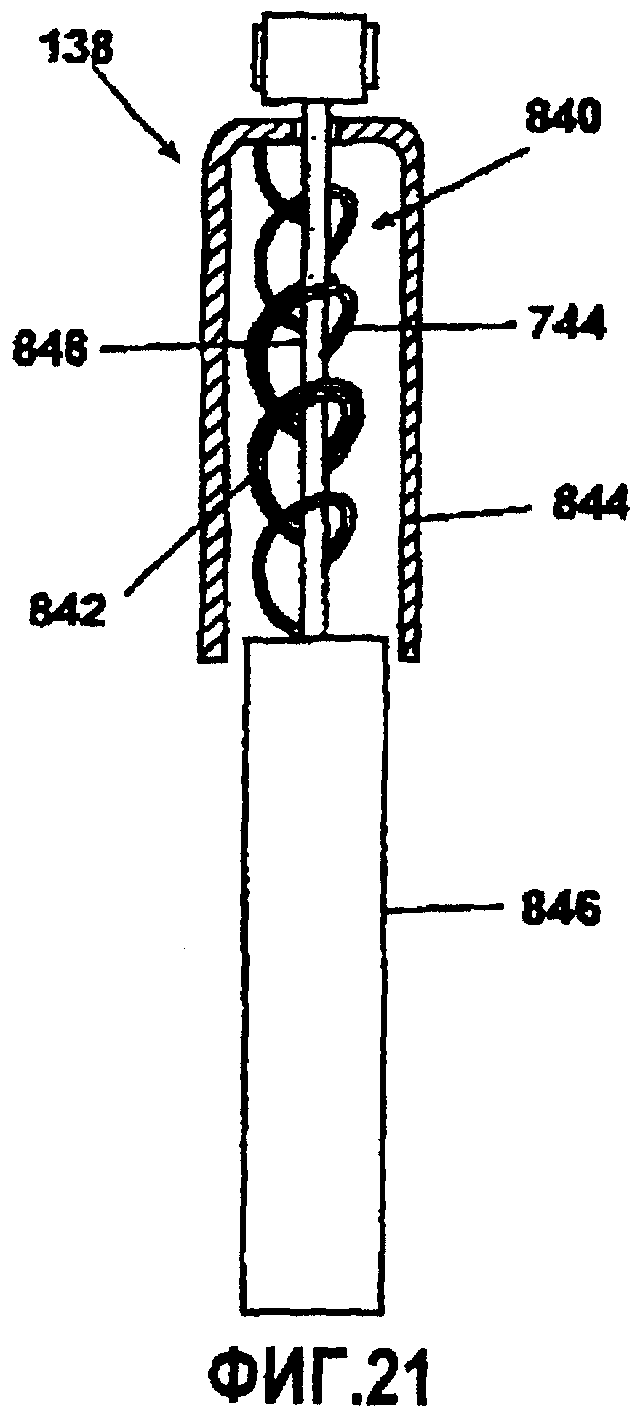
фиг.21 - датчик высоты по шестому варианту осуществления изобретения применительно к амортизатору;
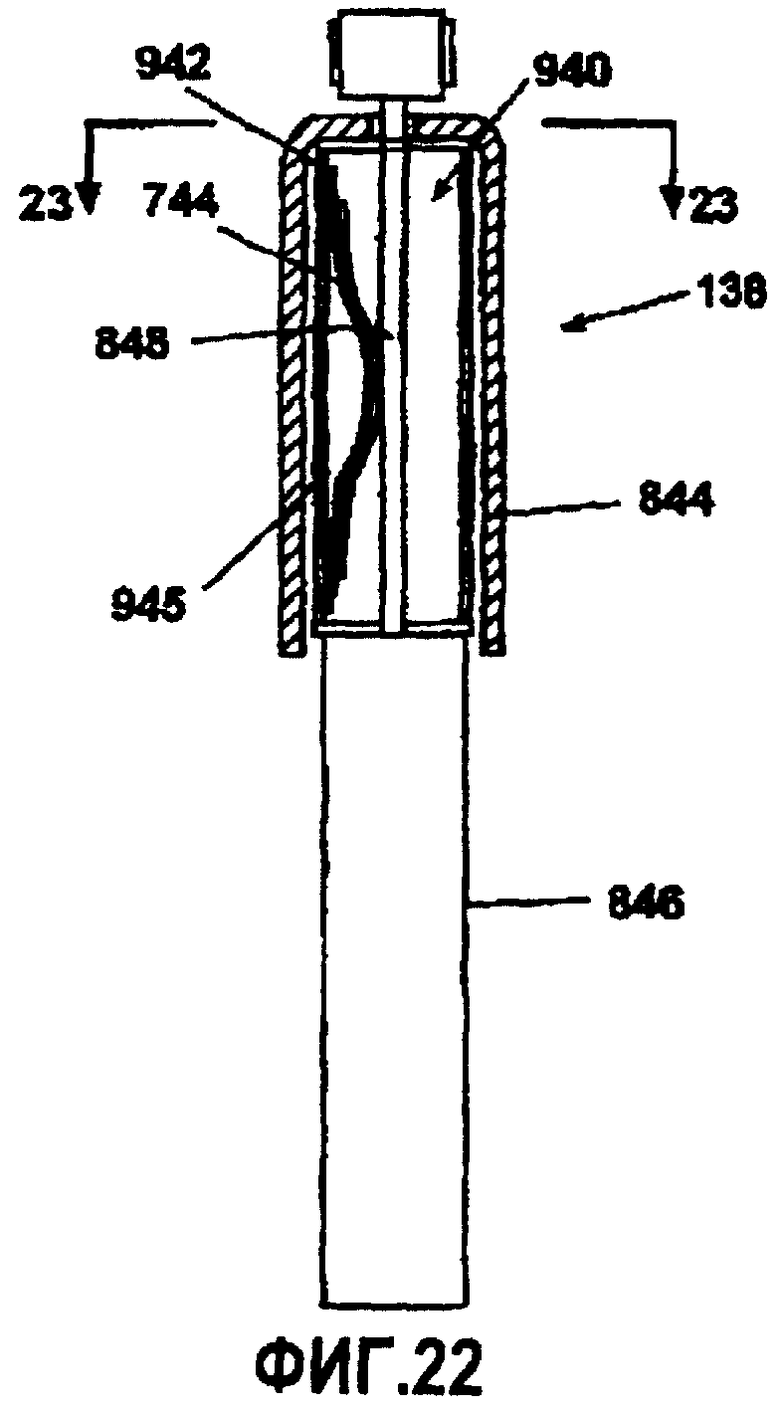
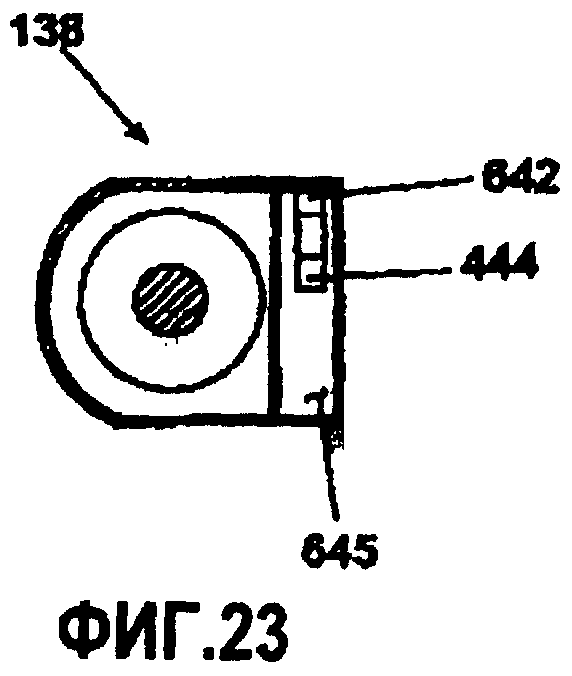
фиг.22 - датчик высоты по седьмому варианту осуществления изобретения;
фиг.23 - сечение, выполненное по линии 23-23 на фиг.22.
Описание предпочтительного варианта осуществления
На Фиг.2 показана подвеска 110 с продольными рычагами согласно изобретению. Подвеска с продольными рычагами содержит два узла (показан только один) 112, содержащих продольные рычаги, прикрепленных к раме 114 транспортного средства и включающих выполненный с приводом от двигателя клапан 116 механизма регулировки высоты согласно изобретению. Узел 112, содержащий продольный рычаг, включает продольный рычаг 118, имеющий один конец, прикрепленный с возможностью поворота посредством втулочного соединения 120 к кронштейну 122 рамы, зависшему от рамы 114 транспортного средства. Пневматическая рессора 124, содержащая поршень 126, прикрепленный к части продольного рычага 118, и емкость 128 для воздуха, прикрепленную к раме 114 посредством пластины 130, соединяет продольный рычаг 118 с рамой 114 транспортного средства. Кронштейн 132 моста прикреплен к продольному рычагу 118 между кронштейном 122 рамы и пневматической рессорой 124 с помощью пары втулочных соединителей 134. В кронштейне моста установлен мост 136, к которому с возможностью вращения прикреплены колеса транспортного средства (непоказанные), контактирующие с грунтом. Между кронштейном 132 моста и кронштейном 122 рамы расположен амортизатор 138.
Несмотря на то, что основные принципы работы подвески с продольными рычагами широко известны, краткое изложение может быть полезным для понимания нижеприведенного описания. Когда колеса транспортного средства "сталкиваются" с изменениями дорожного покрытия (поверхности дороги), они создают силу реакции, действующую на продольный рычаг, вызывая поворот продольного рычага 118 относительно кронштейна 122 рамы и рамы 114 транспортного средства. Поворот продольного рычага 118 демпфируется пневматической рессорой 124.
Помимо демпфирования поворота продольного рычага 118 пневматическая рессора 124 также используется для регулирования высоты рамы 114 относительно грунта. Например, если предположить, что условия являются статическими, то по мере введения воздуха в емкость 128 для воздуха рама 114 транспортного средства будет подниматься относительно продольного рычага 118, поскольку продольный рычаг 118 будет эффективно зафиксирован относительно грунта из-за контакта между контактирующим с грунтом колесами и грунтом. Аналогичным образом, если сжатый воздух выпускается из емкости 128 для воздуха, рама 114 транспортного средства будет опускаться и высота ее будет уменьшаться относительно грунта.
Приспособление 140 против провертывания предусмотрено на раме 114 транспортного средства и служит для ограничения поворота продольного рычага 118 во время погрузки, который вызывает уменьшение высоты рамы транспортного средства. Это явление известно в данной области техники как "скольжение" прицепа и имеет место, поскольку подача воздуха в пневматические рессоры, как правило, выключена во время погрузки. Поскольку вес груза в прицепе увеличивается при добавлении груза, пневматическую рессору невозможно будет наполнить воздухом для противодействия увеличенному весу, что приводит к опусканию рамы. По мере опускания рамы продольный рычаг эффективно поворачивается вокруг втулочного соединения, что приводит к вращению колес и к смещению прицепа от погрузочной платформы.
Приспособление 140 против провертывания содержит стопорный рычаг 142, который прикреплен к раме 114 транспортного средства с возможностью поворота. Стопорный рычаг может быть повернут из положения отвода (показанного пунктирными линиями) в положение выдвижения, при котором конец стопорного рычага 142 расположен над продольным рычагом 118 и ограничивает поворот продольного рычага 118 вверх относительно рамы транспортного средства. Управление перемещением стопорного рычага 142 между положением отвода и положением выдвижения, как правило, осуществляется с помощью пневматического привода (непоказанного), который реагирует на введение сжатого воздуха в приводное устройство или выпуск сжатого воздуха из приводного устройства. Данный тип приспособления 140 против провертывания хорошо известен и не будет описываться более подробно.
Датчик 144 системы регулирования высоты прикреплен к кронштейну 122 рамы и соединен в рабочем положении с продольным рычагом 118, так что датчик 144 отслеживает ориентацию продольного рычага и выдает сигнал, соответствующий данной ориентации. Датчик 144 системы регулирования высоты электрически соединен с выполненным с приводом от двигателя клапаном 116 механизма регулировки высоты для подачи клапану 116 механизма регулировки высоты сигнала, указывающего на положение продольного рычага.
Как показано на фиг.2 и 3, датчик 144 неподвижно прикреплен к внутренней поверхности кронштейна 122 рамы и механически соединен с втулочным соединителем 120 посредством соединительного элемента 146. Кронштейн 122 рамы имеет противоположные боковые стенки 148, которые соединены торцевой стенкой 150. Втулочный соединитель 120 содержит наружную втулку 152, которая установлена по прессовой посадке внутри продольного рычага 118, и внутреннюю втулку 154, которая концентрично вставлена в наружную втулку 152. Кольцо 155 из эластомерного материала удерживается между наружной втулкой 152 и внутренней втулкой 154 при сдавливании этого кольца. Концы внутренней втулки 154 упираются в соответствующие внутренние поверхности боковых стенок 148. Монтажный болт 156 обеспечивает поджим боковых стенок 148 к концам внутренней втулки 154 для фиксации внутренней втулки относительно кронштейна 122 рамы. При данной конструкции поворот продольного рычага приводит к повороту наружной втулки 152 относительно внутренней втулки 154. Поворот осуществляется с помощью эластомерного кольца 155, которое обеспечивает возможность поворота наружной втулки 152 относительно внутренней втулки 154.
Датчик 144 содержит наружную ось 160, которая соединена с соединительным элементом 146, который соединен с наружной втулкой 152. Соединительный элемент 146 может иметь любую пригодную форму при условии, что поворот наружной втулки соответствующим образом вызывает поворот наружной оси 160. Например, соединительный элемент может содержать рычаги 162, 164, которые соединены за счет того, что один из рычагов имеет штырь, который входит в паз на конце другого рычага, в результате чего поворот наружной втулки соответствующим образом передается наружной оси 160 датчика 144 при одновременной приспособляемости к любому вертикальному смещению рычагов 162, 164 друг относительно друга.
На фиг.4 и 5 показан предпочтительный вариант осуществления датчика 144. Датчик 144 содержит излучатель 170 света, который прикреплен к наружной оси 160. Излучатель 170 света предпочтительно образован из твердого блока 172 из металла или пластмассы, имеющего камеру 174 для источника света и канал 176 для прохода света, оптически соединяющий камеру 174 для источника света с пространством, наружным по отношению к излучателю 170 света. Источник 178 света, такой как светоизлучающий диод или лазер, расположен внутри камеры 174 для источника света и излучает свет, который выходит из блока 172 по каналу 176 для прохода света вдоль траектории А.
Датчик 144 высоты дополнительно содержит устройство 190 со светолучевыми датчиками, включающее светонепроницаемый корпус 192, имеющий открытый конец, в котором неподвижно размещен рассеивающий элемент 194, такой как матированное стекло. Фотоэлемент в виде оптического измерительного моста 196 расположен внутри светонепроницаемого корпуса 192 за рассеивающим элементом 194. Оптический измерительный мост 196 включает два датчика 198, 200, расположенных на расстоянии друг от друга, которые могут представлять собой фоторезисторы или фотодиодные детекторы. Каждый светолучевой датчик выдает сигнал напряжения, характеризующий силу света, который они воспринимают. Сигналы напряжения и их разности используются для оценки изменения высоты транспортного средства. Оптический измерительный мост 196 предпочтительно представляет собой мостовую схему для измерения сопротивления (мост Уитстона), в которой фоторезисторы используются или в схеме, представляющей собой полумост (2 фоторезистора), или в схеме, представляющей собой полный мост (4 фоторезистора).
Функционирование светолучевого датчика 144 лучше всего описано со ссылкой на фиг.4 и 5. На фиг.4 показано положение излучателя 170 света, когда транспортное средство находится на базовой высоте при движении. Следует отметить, что несмотря на то, что на фиг.4 показан излучатель 170 света, ориентированный по существу перпендикулярно устройству 190 со светолучевыми датчиками, когда транспортное средство находится на базовой высоте при движении, излучатель 170 света может быть ориентирован под углом относительно устройства 190 со светолучевыми датчиками для задания базовой высоты при движении.
В исходном положении, показанном на фиг.4, излучатель 170 света излучает луч света вдоль траектории А. Когда луч света достигнет рассеивающего элемента 194 устройства 190 со светолучевыми датчиками, лучи рассеянного света "войдут в контакт" со светолучевыми датчиками 198, расположенными на расстоянии друг от друга. Лучи света проходят расстояние d1 и d2 от рассеивающего элемента 194 до соответствующих светолучевых датчиков 198, 200. Расстояние, которое проходят лучи света, влияет на силу света, воспринимаемого светолучевыми датчиками, что приводит к выдаче датчиками соответствующего выходного сигнала напряжения.
Как показано на фиг.5, в случае изменения высоты транспортного средства, например при загрузке или выгрузке продукта из транспортного средства, продольный рычаг 118 будет поворачиваться относительно кронштейна 122 рамы, что приводит к соответствующему повороту наружной втулки 152, который вызывает соответствующий поворот наружной оси 160 датчика 144 высоты. При повороте наружной оси 160 датчика высоты излучатель 170 света поворачивается в новое положение, и луч А света сталкивается с рассеивающим элементом 194 в другом месте. Лучи света, выходящие из рассеивающего элемента 194 и поступающие в светолучевые датчики 198, теперь должны проходить расстояния d3 и d4. Как можно видеть при сравнении этих расстояний с расстояниями d1, d2, расстояние d3, которое должен пройти луч света, чтобы достигнуть датчика 198, меньше ранее указанного расстояния d1. Напротив, расстояние d4 больше расстояния d2 для луча света, проходящего к светолучевому датчику 200. Результатом изменения положения излучателя 170 света от положения по фиг.4 до положения по фиг.5 является то, что датчик 198 воспринимает свет большей силы, а датчик 200 воспринимает свет меньшей силы. Изменение силы света соответствует изменению выходного сигнала напряжения, генерируемого светолучевыми датчиками 198, 200. Изменение выходных сигналов от датчиков 198, 200 непосредственно связано с изменением положения продольного рычага 118 при повороте его относительно рамы 114 транспортного средства и представляет собой меру, характеризующую изменение высоты транспортного средства от заданного положения. Выходной сигнал от светолучевых датчиков 198, 200 может быть использован для регулирования введения и выпуска сжатого воздуха в пневматические рессоры и из пневматических рессор с целью подъема или опускания рамы транспортного средства до тех пор, пока излучатель 170 света не будет повернут обратно в исходное положение.
На фиг.6 показаны компоненты выполненного с приводом от двигателя клапана 116 механизма регулировки высоты согласно изобретению. Выполненный с приводом от двигателя клапан 116 механизма регулировки высоты содержит состоящий из двух частей корпус, имеющий основание 202 и крышку 204, которая показана снятой с основания 202. Основание 202 функционально разделено на две части: часть 206 для осуществления электрического соединения и часть 208 для регулирования потока текучей среды. Часть 206 для осуществления электрического соединения содержит интерфейс 210 ввода-вывода, который имеет необходимые электрические соединения для соединения с датчиком 144 высоты и любыми другими датчиками. Часть 208 для регулирования потоков текучей среды содержит клапанный узел 212 и коллектор 214 для текучей среды, имеющий впускное отверстие 216 и отверстие 218 для соединения с пневматической рессорой. Выпускное отверстие 220 выполнено на противоположной стороне основания 202 по отношению к впускному отверстию 216 и отверстию 218 для соединения с пневматической рессорой. Клапанный узел 212 обеспечивает регулирование потока текучей среды из отверстия 218 для соединения с пневматической рессорой в любое из двух отверстий - во впускное отверстие 216 или в выпускное отверстие 220, чтобы тем самым регулировать введение и выпуск сжатого воздуха из пневматической рессоры.
Устройство 222, приводящее в действие клапан, соединено в рабочем положении с клапанным узлом 212. Устройство 222, приводящее в действие клапан, содержит электродвигатель 224, имеющий выходной вал 266, на котором установлено ведущее зубчатое колесо 228. Передаточное зубчатое колесо 230 введено в зацепление с приводным зубчатым колесом 228 и имеет управляющую ось 232, которая соединена с клапанным узлом, в результате чего приведение в действие электродвигателя 224 приводит к повороту ведущего зубчатого колеса 228, которое посредством передаточного зубчатого колеса 230 вызывает поворот управляющей оси 232, чтобы тем самым обеспечить управление клапанным узлом и регулирование сообщения по текучей среде между пневматической рессорой и или впускным отверстием 216, или выпускным отверстием 220.
Внутри клапана 116 механизма регулировки высоты, выполненного с приводом от двигателя, предусмотрен контроллер 240. Предпочтительно контроллер 240 образован монтажной платой 242, на которой смонтированы электродвигатель 224 и передаточное зубчатое колесо 230. На монтажной плате 242 смонтирован микропроцессор 244, который электрически соединен с интерфейсом 210 ввода-вывода и с электродвигателем 224. На монтажной плате 242 также предусмотрен датчик 246 положения клапана, который электрически соединен с микропроцессором 244. Датчик 246 положения клапана включает в себя приводное устройство 248, расположенное на клапанном узле 212.
На фиг.7 и 8 основание 202 показано при удаленном клапанном узле 212. Основание 202 имеет внутреннюю камеру 260, открытую с одной стороны для приема клапанного узла. Внутренняя камера 260 частично ограничена внутренней боковой стенкой 262 корпуса и внутренней периферийной стенкой 264, которая проходит от боковой стенки 262. Канал 266 для подачи воздуха и канал 268 для соединения с пневматической рессорой проходят от камеры 260 соответственно к впускному отверстию 216 и отверстию 218 для соединения с пневматической рессорой. Канал для подачи воздуха образует щелеобразное отверстие 266А в периферийной стенке 264. Канал для соединения с пневматической рессорой образует отверстие 268А в стенке 262. Выпускной канал 270 проходит от наружной стороны основания 202 до выпускного отверстия 220.
Канал 266 для подачи воздуха приспособлен для соединения по текучей среде источника сжатого воздуха с внутренней камерой 260. Канал 268 для соединения с пневматической рессорой обеспечивает соединение по текучей среде между внутренней камерой 260 и емкостью 128 для подъема пневматической рессоры. Выпускной канал 270 обеспечивает соединение по текучей среде между камерой 260 и атмосферой.
Как показано на фиг.9 и 10, клапанный узел 212 содержит золотниковый клапан, включающий статический золотниковый диск 273 и динамический диск 273. Статический диск 272 имеет аксиальное проходное отверстие в виде отверстия 274 и канал для прохода текучей среды в виде отверстия 276, при этом оба этих отверстия проходят сквозь диск 272. Статический золотниковый диск 272 имеет глухие отверстия 278 и 280 для выставления, в которые входят установочные штифты, проходящие от основания 202 во внутреннюю камеру 260 для выставления статического золотникового диска 272 относительно основания 202, так что отверстие 276 будет располагаться соосно с отверстием 268А канала 268 для соединения с пневматической рессорой. Аксиальное отверстие 274 будет расположено соосно с выпускным каналом 270. Таким образом, отверстие 276 и аксиальное отверстие 274 обеспечивают установление сообщения по текучей среде между верхней поверхностью статического диска 272 и отверстием 218 для соединения с пневматической рессорой и выпускным отверстием 220.
На фиг.10 динамический золотниковый диск 273 показан со стороны его нижней поверхности. Динамический золотниковый диск 273 расположен внутри внутренней камеры 260 основания 202 так, что нижняя поверхность динамического золотникового диска сопрягается с верхней поверхностью статического золотникового диска 270. Динамический золотниковый диск 273 имеет часть 282 в виде сектора, от которой проходит круглый выступ 284. Проходное отверстие в виде имеющей по существу Т-образную форму выемки 286 образовано в динамическом золотниковом диске 273 и имеет дугообразную часть 288 и канал 290. Дугообразная часть 288 преимущественно расположена в части 282 в виде сектора и имеет противолежащие выходные фасонные пазы 294. Входной фасонный паз 296 выполнен на наружной стороне части 282 в виде сектора и соответствует одному из выходных фасонных пазов 294. Несквозной паз 298 образован на верхней поверхности динамического золотникового диска 273 и выполнен с размерами, обеспечивающими возможности вставки в него конца управляющей оси 232.
При собранном состоянии клапана отверстие 276 золотникового диска 272 будет находиться между одной из пар выходных фасонных пазов 294 и входных фасонных пазов 296. Нижний конец управляющей оси 232 входит в несквозной паз 298. Канал 290 соединяет по текучей среде дугообразную часть 288 и выходные фасонные пазы с выпускным отверстием 220 посредством выпускного канала 270.
На фиг.11-13 показаны три основных рабочих положения золотникового клапана: положение наполнения, нейтральное положение и положение выпуска. В данном описании предполагается, что клапан механизма регулировки высоты начинает работать, находясь в нейтральном положении. В нейтральном положении, показанном на фиг.11, динамический золотниковый диск 273 ориентирован относительно золотникового диска 272 таким образом, что отверстие 276 золотникового диска будет расположено между внутренним пазом 294 и наружным пазом 296, и с одной стороны его будет закрывать динамический золотниковый диск 273, что позволяет эффективно перекрыть отверстие 268А канала 268 для соединения с пневматической рессорой и заблокировать сообщение по текучей среде и между каналом 266 для подачи воздуха и каналом 268 для соединения с пневматической рессорой, и между выпускным каналом 270 и каналом 268 для соединения с пневматической рессорой.
Если по какой-либо причине имеет место относительное смещение продольного рычага 118 в направлении продольной балки 16, такое как вызванное увеличением нагрузки при загрузке прицепа, клапан смещается в положение наполнения, показанное на фиг.12, для обеспечения введения воздуха в емкость 128 для воздуха с целью подъема рамы транспортного средства. Как видно на фиг.12, при таких условиях электродвигатель 224 вызывает поворот динамического золотникового диска 273, так что отверстие 276 смещается в положение, при котором оно будет сообщаться по текучей среде с наружным пазом 296 для открытия сообщения между каналом 268 для соединения с пневматической рессорой и внутренней камерой 260. Поскольку внутренняя камера 260 постоянно сообщается с каналом 266 для подачи воздуха, сжатый воздух будет направляться в канал 268 для соединения с пневматической рессорой, и сжатый воздух будет поступать в пневматические рессоры.
Если продольный рычаг 118 и продольная балка 16 рамы будут смещаться друг относительно друга, например при выгрузке груза из прицепа, воздух должен быть выпущен из емкостей 128 для воздуха для смещения рамы 114 обратно до ее базовой высоты. Как видно на фиг.13, при таких обстоятельствах клапан смещается в положение выпуска с помощью электродвигателя 224, вызывающего смещение динамического золотникового диска 273 относительно золотникового диска 272, так что создается сообщение по текучей среде между внутренним пазом 294 и отверстием 276. В положении выпуска канал 268 для соединения с пневматической рессорой сообщается по текучей среде с выпускным каналом 270 посредством канала 290.
Фиг.14 представляет собой схематичную иллюстрацию системы регулирования высоты для подвески 110 и показывает взаимосвязь между центральным контроллером 300 транспортного средства, контроллером 240 для управления подвеской, датчиком 144 высоты и клапанным узлом 212. Схема также включает датчик 302 для определения положения рычагов 142 приспособления против провертывания. Предусмотрен воздушный резервуар 304, который обеспечивает подачу сжатого воздуха в пневматическую систему подвески и в пневматическую тормозную систему.
Центральный контроллер 300 транспортного средства управляет работой многих из функциональных элементов транспортного средства. Центральный контроллер 300 транспортного средства, как правило, соединен с множеством отдельных контроллеров, которые управляют работой конкретных функциональных элементов, при этом примером такого отдельного контроллера является контроллер 240 для управления подвеской. Центральный контроллер 300 транспортного средства имеет провод 310 для подачи питания, который обеспечивает подачу питания к контроллеру 240 для управления подвеской. Шины 312, 314 данных обеспечивают соответственно подачу данных (вывод) и прием данных (ввод) от контроллера 240 для управления подвеской. Предпочтительно шина 312 вывода данных обеспечивает направление сигнала данных о выбранной пользователем функции/режиме от центрального контроллера 300 контроллеру 240 для управления подвеской, который используется контроллером 240 для управления подвеской для определения его режима работы. Шина 314 ввода данных предпочтительно обеспечивает ввод в центральный контроллер 300 данных о высоте, данных о режиме и/или данных о воздухе из контроллера 240 для управления подвеской.
Датчик 144 высоты имеет провод 316 для подачи питания, который обеспечивает подачу электропитания от контроллера 240 для управления подвеской датчику 144 высоты. Шина 318 данных обеспечивает подачу в контроллер 240 для управления подвеской входного сигнала, который указывает текущую высоту транспортного средства.
Клапанный узел 212 содержит провод 320 для подачи питания, который обеспечивает подачу электропитания от контроллера 240 для управления подвеской клапанному узлу 212. Шина 322 данных обеспечивает подачу в контроллер 240 для управления подвеской входного сигнала, который указывает положение динамического диска относительно стационарного диска. Шина 333 для подачи управляющего сигнала обеспечивает подачу сигнала данных от контроллера 240 для управления подвеской клапанному узлу 212 для управления работой электродвигателя. Как было описано ранее, впускное отверстие 214 клапана механизма регулировки высоты соединено по текучей среде с резервуаром 304 транспортного средства, предназначенным для сжатого воздуха. Аналогичным образом, отверстие 216 для соединения с пневматической рессорой соединено по текучей среде с пневматической рессорой 124. Выпускное отверстие 218 соединено по текучей среде с атмосферой.
Провод 324 для подачи питания обеспечивает подачу питания от контроллера 240 для управления подвеской датчику 302. Как и в случае других датчиков, шина 326 данных обеспечивает подачу в контроллер 240 для управления подвеской входного сигнала, характеризующего положение рычага 142. Существуют и используются в настоящее время множество датчиков, пригодных для определения положения рычагов 142. Принимая во внимание, что рычаги 142 приводятся в действие за счет выпуска сжатого воздуха из стояночных тормозов с пневматическим приводом, широко распространенным датчиком является датчик давления, который выдает электрический сигнал при выпуске воздуха из стояночных тормозов.
Контроллер 240 для управления подвеской включает запоминающее устройство, предпочтительно энергонезависимое запоминающее устройство, которое содержит логику, необходимую для управления подвеской транспортного средства, особенно для регулирования высоты транспортного средства. В контроллер 240 также введен алгоритм фильтрации, который используется для обработки данных, полученных от датчика 144 высоты. Алгоритм фильтрации обеспечивает фильтрацию данных, полученных от датчика 144 высоты, с тем, чтобы исключить высокочастотные изменения, которые обычно указывают на временные изменения высоты, и тем самым избежать регулирования высоты транспортного средства без необходимости. Растянутые стыки на дорожном покрытии или другие повторяющиеся или неповторяющиеся отклонения представляют собой примеры факторов, вызывающих высокочастотные изменения высоты транспортного средства, из-за которых нежелательно изменять надлежащую высоту транспортного средства.
Необходимость избежания ненужного регулирования высоты транспортного средства имеет важное значение для работы транспортного средства. Установленные государством правила требуют, чтобы воздухопровод тормозной системы был отделен от всех остальных воздухопроводов, включая воздухопровод подвески. На большинстве транспортных средств имеются только два воздухопровода или две пневматические системы: воздухопровод тормозной системы и воздухопровод подвески, который также обеспечивает подачу воздуха к любым вспомогательным устройствам с пневматическим приводом. В большинстве пневматических систем всасывание сжатого воздуха для обеих систем происходит из одного и того же воздушного резервуара 304 путем использования клапана (предохранительного клапана), который обеспечивает подачу воздуха только в воздухопровод тормозной системы, как только давление в воздушном резервуаре упадет ниже заданной величины. Если будет происходить ненужное регулирование высоты транспортного средства, например в ответ на временные изменения высоты, будет существовать возможность всасывания сжатого воздуха из воздушного резервуара 304 со скоростью, превышающей ту скорость, с которой размещенный на транспортном средстве компрессор сможет обеспечить повторное наполнение воздушного резервуара, что приводит к преждевременному и ненужному выключению системы регулирования высоты до тех пор, пока давление воздуха не повысится до значений, превышающих пороговое значение.
В процессе эксплуатации пользователь транспортного средства сначала выбирает режим работы подвески, который затем передается контроллеру 240 для управления подвеской. Выбор режима может включать задание надлежащей высоты транспортного средства. В альтернативном варианте осуществления изобретения предпочтительная высота при движении и значение, вводимое пользователем, могут быть заданы равными текущей высоте при движении. Как только исходный режим работы и высота транспортного средства при движении будут заданы, управление подвеской 114 перейдет к устройству 240 управления подвеской.
Несмотря на то, что контроллер 240 для управления подвеской может управлять многими операциями, связанными с подвеской, в целях обеспечения надлежащей работы системы регулирования высоты согласно настоящему изобретению наиболее важной операцией, которой управляет контроллер 240 для управления подвеской, является регулирование высоты транспортного средства при движении в ответ на данные о высоте при движении, которые выдает датчик 144 высоты, и соответствующее регулирование высоты транспортного средства при движении путем регулирования объема пространства в предназначенных для воздуха емкостях 128 пневматических рессор. Контроллер 240 для управления подвеской предпочтительно получает данные о высоте при движении от датчика 144 высоты посредством шины 318 данных. Контроллер 240 для управления подвеской анализирует данные о высоте при движении для мониторинга как высокочастотных, так и низкочастотных изменений высоты при движении. Предпочтительно контроллер 240 для управления подвеской осуществляет фильтрацию данных о высоте при движении для удаления информационных точек, относящихся к высокочастотным изменениям высоты транспортного средства при движении, ввод которых, как правило, обусловлен явлениями, которые не должны быть причиной изменения текущей высоты при движении.
Подвергнутые фильтрации данные о высоте при движении затем регистрируют и сравнивают с базовой высотой транспортного средства при движении. Как только изменяющаяся текущая высота при движении превысит базовую высоту при движении на заданную величину "Дельта", контроллер 240 для управления подвеской выполнит регулировку текущей высоты транспортного средства при движении соответственно или путем введения, или путем выпуска сжатого воздуха из пневматической рессоры 124. Передача данных о текущей высоте при движении обычно осуществляется в течение заданного периода времени, называемого "Проверочным периодом", чтобы гарантировать то, что изменение текущей высоты при движении относительно базовой высоты при движении не является временным. Если изменение текущей высоты при движении будет превышать «Дельта» в течение «Проверочного периода», это обычно указывает на то, что имеет место постоянное изменение высоты транспортного средства при движении и что необходимо отрегулировать текущую высоту при движении до базовой высоты при движении. Стоит отметить, что абсолютное значение «Дельты» обычно является одним и тем же независимо от того, превышает ли текущая высота при движении базовую высоту при движении или она меньше базовой высоты при движении. Тем не менее, в пределах объема изобретения параметр «Дельта» может принимать разные значения в зависимости от того, превышает ли текущая высота при движении базовую высоту при движении или она меньше базовой высоты при движении. Также следует отметить, что значение параметра «Дельта», как правило, определяется пользователем и может изменяться в зависимости от транспортного средства, подвески, условий эксплуатации или других факторов.
Если текущая высота при движении будет больше базовой высоты при движении на величину, превышающую величину величину Дельта, в течение «Проверочного периода», то это значит, что текущая высота при движении слишком большая и должна быть уменьшена до базовой высоты при движении. Для перемещения подвески до базовой высоты при движении контроллер 240 управления подвеской направляет управляющий сигнал по шине 233 к клапанному узлу 212 для включения электродвигателя 224 и тем самым выполнения поворота динамического диска 273 для перевода клапана в положение выпуска, при котором отверстие 218 для соединения с пневматической рессорой сообщается по текучей среде с выпускным отверстием 220 для выпуска воздуха из емкостей 128 для воздуха и уменьшения текущей высоты при движении до базовой высоты. Контроллер 240 для управления подвеской продолжает получать данные о высоте от датчика 144 высоты, пока воздух выпускается из емкости 128 для воздуха через клапанный узел 212. Когда контроллер 240 для управления подвеской определит из данных о высоте, что текущая высота транспортного средства по существу стала равной базовой высоте при движении, контроллер 240 для управления подвеской направляет управляющий сигнал электродвигателю 224 для смещения динамического золотникового диска 273 назад в нейтральное положение с целью прекращения выпуска воздуха из емкости 128 для воздуха.
Если текущая высота при движении будет меньше базовой высоты при движении на величину, превышающую величину «Дельта», в течение «Проверочного периода», то это значит, что текущая высота при движении слишком мала и должна быть увеличена до базовой высоты при движении. Для смещения подвески до базовой высоты при движении контроллер 240 для управления подвеской направляет управляющий сигнал по шине 233 к клапанному узлу 212 для включения электродвигателя 224 и тем самым выполнения поворота динамического диска 273 для перевода клапана в положение наполнения, при котором отверстие 216 для соединения с пневматической рессорой сообщается по текучей среде с впускным отверстием 214 для введения воздуха в емкости 128 для воздуха и увеличения текущей высоты при движении до базовой высоты. Контроллер 240 для управления подвеской продолжает получать данные о высоте от датчика 144 высоты, пока воздух выпускается из емкости 128 для воздуха через клапанный узел 212. Когда контроллер 240 для управления подвеской определит из данных о высоте, что текущая высота транспортного средства по существу стала равной базовой высоте при движении, контроллер 240 для управления подвеской направляет управляющий сигнал электродвигателю 224 для смещения динамического золотникового диска 273 назад в нейтральное положение с целью прекращения выпуска воздуха из емкости 128 для воздуха.
Предпочтительно, если контроллер 240 для управления подвеской посредством его запрограммированной логики контролирует скорость изменения высоты при движении, когда она приближается к базовой высоте при движении, чтобы избежать перехода за базовую высоту при движении, который в том случае, если он будет слишком большим, может потребовать дополнительного регулирования высоты транспортного средства при движении, выполняемого в противоположном направлении. В наихудшем случае это может привести к колебательному эффекту, когда высота при движении будет непрерывно увеличиваться и уменьшаться относительно базовой высоты, что, скорее всего, приведет к падению давления воздуха в воздушном резервуаре 304 ниже порогового значения.
Несмотря на то, что существует много способов, с помощью которых контроллер 240 для управления подвеской может направить управляющий сигнал клапанному узлу 212 для приведения в действие электродвигателя 224 с целью регулирования положения динамического диска 273 и тем самым управления введением и выпуском сжатого воздуха из емкости 128 для воздуха, предпочтительно, чтобы контроллер 240 для управления подвеской и управляющий сигнал имели или положительное, или отрицательное напряжение. Знак сигнала напряжения соответственно обуславливает приведение электродвигателя в действие в прямом или обратном направлении. Вместе с сигналом напряжения, имеющим знак "плюс" или "минус", контроллер 240 для управления подвеской получает по шине 322 данные, относящиеся к положению динамического золотникового диска 273. Информация о положении используется для определения положения динамического золотникового диска 273 и для того, чтобы снабдить контроллер 240 управления подвеской информацией, необходимой для определения соответствующего знака сигнала напряжения, необходимого для смещения динамического золотникового диска 273 в требуемое положение для установки клапана или в положение наполнения, или в нейтральное положение, или в положение выпуска.
На фиг.15 показан датчик 440 высоты по второму варианту осуществления изобретения, предназначенный для использования в изобретении. Датчик 440 высоты во многих отношениях аналогичен датчику высоты по первому варианту осуществления изобретения, и поэтому аналогичные ссылочные номера будут использованы для обозначения аналогичных элементов, и подробно будут рассмотрены только основные различия между первым и вторым вариантами осуществления изобретения. Датчик 440 высоты содержит излучатель 470 света, который прикреплен к наружной оси 160 и излучает систему дифракционных полос на устройство 490 со светолучевыми датчиками. Излучатель 470 света содержит блок 472, имеющий камеру 474 для источника света и дифракционную щель 476, оптически соединяющую камеру 474 для источника света с пространством, наружным по отношению к блоку 472. Излучатель света, такой как светоизлучающий диод или диодный лазер, расположен в камере 474 для источника света. Коллиматорная линза расположена между источником 478 света и дифракционной щелью 476.
Устройство 490 со светолучевыми датчиками содержит оптический измерительный мост 496, имеющий расположенные на расстоянии друг от друга, светолучевые датчики 498, 500. Оптический измерительный мост 496 не заключен внутрь корпуса, как было в первом варианте осуществления изобретения. Кроме того, отсутствует рассеивающий элемент, расположенный между оптическим измерительным мостом 496 и излучателем 470 света.
Излучатель 470 света излучает систему дифракционных полос (дифракционную картину), проиллюстрированную пунктирной линией В. Пунктирная линия В характеризует интенсивность света относительно светолучевых датчиков 498, 500. Как можно видеть, в исходном положении, подобном показанному на фиг.7, зона наибольшей интенсивности системы дифракционных полос по существу расположена в центре между светолучевыми датчиками 498, 500. Светолучевые датчики 498, 500 предпочтительно расположены так, что они воспринимают часть дифракционной картины, которая соответствует приблизительно 50% от максимальной интенсивности. Когда наружная ось 460 поворачивается в ответ на изменение высоты транспортного средства, система дифракционных полос смещается в боковом направлении относительно оптического измерительного моста 496, как показано с помощью дифракционной картины С. Смещение системы дифракционных полос приводит к изменению интенсивности (силы) света, воспринимаемой датчиками 498, 500. Оптический измерительный мост 496 выдает сигнал напряжения, который соответствует интенсивности, воспринимаемой в данный момент оптическими датчиками 498, 500. Этот выходной сигнал обрабатывается таким же образом, как выходной сигнал в случае первого варианта осуществления изобретения, описанного выше.
Для второго варианта осуществления изобретения предпочтительно, чтобы излучатель света представлял собой или мощный узкополосный инфракрасный светоизлучающий диод (приблизительно 940 нм), или инфракрасный диодный лазер. Свет от излучателя света предпочтительно согласуется или оптимизируется в соответствии с чувствительностью светолучевых датчиков 498, 500, которые могут представлять собой, например, или фотоэлементы с внутренним фотоэффектом, или фотодиоды инфракрасного диапазона, или инфракрасные фотогальванические фотоэлементы.
Для изобретения также важно, чтобы свет, излучаемый излучателем 470 света, был коллимирован и затем пропущен через щель для создания дифракционной картины. Следовательно, форму щели необходимо точно регулировать для получения дифракционной картины. Например, если излучатель света излучает свет с длиной волны 940 нм, то ширина щели должна быть порядка 0,00005 - 0,0001 м. Свет, выходящий из щели 476, должен проходить расстояние, которое является относительно большим по сравнению с шириной щели, до контакта с оптическим измерительным мостом. В вышеприведенном примере достаточным является расстояние, составляющее 5 см.
На фиг.16 и 17 показан датчик 540 высоты по третьему варианту осуществления изобретения, установленный в зоне подвески с продольными рычагами транспортного средства, показанной на фиг.1. Датчик 540 по третьему варианту осуществления изобретения в основном идентичен первому варианту осуществления изобретения, за исключением того, что датчик 540 отслеживает изменение высоты продольного рычага 118 вместо изменения углового положения продольного рычага 118 при его повороте для оценки изменения высоты рамы транспортного средства относительно базового положения. Следовательно, элементы в третьем варианте осуществления изобретения, аналогичные элементам в первом и втором вариантах осуществления изобретения, будут обозначены аналогичными ссылочными номерами. Например, в датчике 540 высоты может использоваться такой же излучатель 170 света и устройство 190 со светолучевыми датчиками, как в первом варианте осуществления изобретения.
Основное различие между датчиком 540 высоты и датчиком 440 высоты заключается в том, что излучатель 170 света является неподвижным, и перемещающаяся в поперечном направлении ступенчатая линза (линза Френеля) 542 расположена между излучателем 570 света и устройством 190 со светолучевыми датчиками. Ступенчатая линза 542 механически соединена с продольным рычагом 118 с помощью соединительного элемента 544. Когда продольный рычаг поворачивается относительно кронштейна 122 рамы, соединительный элемент 544 совершает возвратно-поступательное перемещение относительно датчика 540 высоты и вызывает смещение ступенчатой линзы 542 относительно фиксированного положения излучателя 170 света и устройства 190 со светолучевыми датчиками.
Как хорошо известно, ступенчатая линза 542 содержит ряд концентрических колец 548, при этом каждое кольцо имеет переднюю или отражающую поверхность, которая ориентирована под углом, отличающимся от угла, под которым ориентирована отражающая поверхность другого кольца, так что свет, падающий на плоскую поверхность 546 ступенчатой линзы, проходит через линзу и фокусируется с помощью концентрических колец в заданной фокальной точке.
В датчике 540 высоты плоская поверхность 546 ступенчатой линзы 542 обращена к излучателю 170 света, а концентрические кольца 548 обращены к рассеивающему элементу 194 устройства 190 со светолучевыми датчиками. Следовательно, свет, излучаемый излучателем 170 света и падающий на плоскую поверхность 546 ступенчатой линзы, фокусируется с помощью концентрических колец в точке на рассеивающем элементе 194. Угловая ориентация преломляющих поверхностей, образованных концентрическими канавками, выбрана так, чтобы свет, излучаемый излучателем света, фокусировался в том месте, где расположен рассеивающий элемент 194.
Когда продольный рычаг смещается относительно транспортного средства, ступенчатая линза 542 перемещается в боковом направлении относительно рассеивающего элемента, что вызывает изменение местоположения фокальной точки на рассеивающем элементе и, следовательно, изменение силы света, воспринимаемой светолучевыми датчиками 198, 200. Обработка данных, связанных с изменением положения точки, в которой луч света "контактирует" с рассеивающим элементом 194 после прохождения через ступенчатую линзу 542, осуществляется по существу так же, как описано для первого варианта осуществления изобретения.
На фиг.18 и 19 показан датчик 640 высоты по четвертому варианту осуществления изобретения. Датчик 640 высоты по четвертому варианту осуществления изобретения аналогичен первому и третьему вариантам осуществления изобретения в том, что он реагирует на поворот продольного рычага 118 относительно рамы 114 транспортного средства. Датчик 640 высоты отличается тем, что в нем управляющий сигнал формируется на основе изменения емкости с целью определения изменения высоты рамы транспортного средства относительно продольного рычага 118.
Датчик 640 высоты имеет конденсатор переменной емкости, содержащий комплект расположенных на расстоянии друг от друга стационарных пластин 644, между которыми расположен комплект подвижных пластин 646, что позволяет образовать мостовую схему 642 на основе конденсатора. Стационарные пластины 644 образованы парой противоположных полукруглых пластин 648, при этом каждая полукруглая пластина прикреплена к опорной трубке 650. Полукруглые пластины 648 прикреплены к опорной трубке 650 таким образом, что они оказываются расположенными на небольшом расстоянии друг от друга, что позволяет фактически разделить стационарные пластины 644 соответственно на первую и вторую группы 652, 654. Первая и вторая группы 652, 654 электрически отделены друг от друга. Подвижные пластины 646 имеют форму сектора или треугольного куска пирога и прикреплены к выполненной с возможностью поворота, управляющей оси 656, которая установлена внутри опорной трубки 650 и соединена с наружной осью 160 так, что поворот оси приводит к повороту подвижных пластин 646 относительно стационарных пластин 644.
В предпочтительном исходном положении подвижные пластины 646 расположены относительно первой и второй групп 652, 654 стационарных пластин 644 так, что зазор между первой и второй группами 652, 654 расположен приблизительно центрально относительно подвижной пластины. Пространство между стационарными пластинами и подвижными пластинами предпочтительно заполнено соответствующим диэлектриком.
В процессе работы при повороте продольного рычага 118 относительно рамы 114 транспортного средства под влиянием изменения высоты транспортного средства наружная ось 160 вызывает соответствующий поворот управляющей оси 656, что приводит к смещению подвижных пластин 646 относительно первой и второй групп 652, 654 полукруглых пластин. Когда перемещающиеся пластины закрывают большую площадь на одной группе полукруглых пластин, емкость, обеспечиваемая этой группой полукруглых пластин, увеличивается, что приводит к разнице емкостей между первой и второй группами пластин. Разница в емкости связана с величиной изменения высоты и выдается в качестве выходного сигнала датчиком высоты для использования ее при регулировании высоты транспортного средства.
На фиг.20 показан датчик 740 высоты по пятому варианту осуществления изобретения. В отличие от датчиков по вариантам осуществления изобретения с первого до четвертого, датчик 740 высоты не имеет непосредственного соединения с продольным рычагом 118. Вместо этого датчик 740 высоты расположен во внутреннем пространстве пневматической рессоры 20. Датчик 740 высоты содержит упругую пластину 742, имеющую один конец, присоединенный к верхней пластине 25 пневматической рессоры 20, и другую часть, соединенную с поршнем 22 пневматической рессоры 20. К упругой пластине 742 прикреплен гибкий переменный резистор 744. Гибкий переменный резистор хорошо известен и подробно описан в патенте США №5086785, который включен в настоящее описание путем ссылки. Сопротивление гибкого резистора 744 изменяется по мере его изгибания.
Характерная способность гибкого переменного резистора 744 изменять сопротивление под влиянием его изгиба используется для индикации величины изменения высоты транспортного средства относительно исходного базового положения. Например, когда высота транспортного средства изменяется под действием загрузки или разгрузки транспортного средства, емкость 24 для воздуха будет соответственно сжиматься или расширяться, что приводит к изгибанию упругой пластины 742 и гибкого переменного резистора 744. Изменение сопротивления гибкого переменного резистора 744 в этом случае будет характеризовать степень изменения высоты.
Для обеспечения постоянства важно, чтобы гибкий переменный резистор 744 неоднократно изгибался одинаковым образом. Упругая пластина 742 представляет собой основание для гибкого переменного резистора 744 и способствует многократному изгибанию гибкого переменного резистора 744 одинаковым образом.
На фиг.21 показан датчик 840 высоты по шестому варианту осуществления изобретения. Датчик 840 высоты аналогичен датчику 740 высоты в том, что в нем используется гибкий переменный резистор 744, который намотан вокруг витков спиральной или цилиндрической винтовой пружины 842. Цилиндрическая винтовая пружина 842 расположена во внутреннем пространстве амортизатора 138.
Амортизатор содержит наружный колпак 844, который установлен с возможностью смещения относительно цилиндра 846 и расположен над цилиндром 846, от которого проходит поршневой шток 848, который также проходит через колпак 844. Цилиндрическая винтовая пружина 842 намотана вокруг поршневого штока 848 и имеет один конец, прикрепленный к колпаку 844, и другой конец, прикрепленный к верхней части цилиндра 846.
Датчик 840 высоты функционирует по существу идентично датчику 740 высоты, что проявляется в том, что при повороте продольного рычага 118 относительно рамы 114 транспортного средства колпак 844 амортизатора совершает возвратно-поступательное перемещение относительно цилиндра 846, что вызывает сжатие или расширение цилиндрической винтовой пружины 842, приводящее к изгибанию гибкого переменного резистора 744. Как и в случае датчика 740 высоты, изгибание гибкого переменного резистора 744 и датчика 840 высоты приводит к тому, что датчик 840 высоты выдает сигнал, который соответствует смещению рамы 114 и продольного рычага 118 друг относительно друга.
На фиг.22 и 23 показан датчик 940 высоты по седьмому варианту осуществления изобретения и также в связи с амортизатором 138. Различие между датчиком 940 высоты по седьмому варианту осуществления изобретения и датчиком 840 высоты по шестому варианту осуществления изобретения состоит в том, что вместо цилиндрической винтовой пружины 842 используется упругая пластина 942. Упругая пластина 942 удерживается внутри отдельной камеры 945, образованной в колпаке 844 амортизатора.
Как и в случае датчика 740 высоты, упругая пластина 942 датчика высоты может иметь различные формы исходного изгиба. Например, упругая пластина, подобная описанной для датчика 740 высоты, имеет преимущественно С-образный профиль, в то время как упругая пластина 942 имеет форму половины синусоиды или, другими словами, форму, подобную форме гусеницы пяденицы. Профиль столь же просто может быть выполнен в виде S-образного профиля, ориентированного или вертикально, или горизонтально, или в виде множества синусоид.
Несмотря на то, что изобретение было конкретно описано в связи с некоторыми определенными вариантами его осуществления, следует понимать, что они приведены только в качестве иллюстрации, а не в качестве ограничения, и объем притязаний приложенной формулы изобретения следует толковать так широко, как допускает известный уровень техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КЛИРЕНСОМ ТРАНСПОРТНОГО СРЕДСТВА С БОЛЬШИМ КОЛИЧЕСТВОМ ВХОДНЫХ СИГНАЛОВ | 2008 |
|
RU2391222C2 |
| СИСТЕМА ПНЕВМАТИЧЕСКОЙ ПОДВЕСКИ СО СТОПОРНЫМ КЛАПАНОМ | 2004 |
|
RU2304524C1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| ПОДВЕСКА АВТОМОБИЛЯ | 2011 |
|
RU2472639C1 |
| СИСТЕМА ПОДВЕСКИ И ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2549226C2 |
| МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ПНЕВМАТИЧЕСКОЙ ПОДВЕСКИ И КОМПЬЮТЕРНАЯ ПРОГРАММА ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ ПНЕВМАТИЧЕСКОЙ ПОДВЕСКИ | 2010 |
|
RU2516888C2 |
| СИСТЕМА ПОДВЕСКИ ДЛЯ ТЯЖЕЛЫХ И ПРОФЕССИОНАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2550784C2 |
| СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩАЯ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2009 |
|
RU2448000C2 |
| СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2395407C2 |
| АКТИВНАЯ СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2006 |
|
RU2412068C2 |
Изобретение относится к подвеске с продольными рычагами. Сущность изобретения заключается в том, что подвеска с продольными рычагами имеет систему регулирования высоты, предназначенную для регулирования высоты подвески относительно транспортного средства при движении. Система регулирования высоты предпочтительно содержит клапан механизма регулировки высоты, выполненный с приводом от двигателя. Техническим результатом является снижение стоимости. 3 н. и 32 з.п. ф-лы, 23 ил.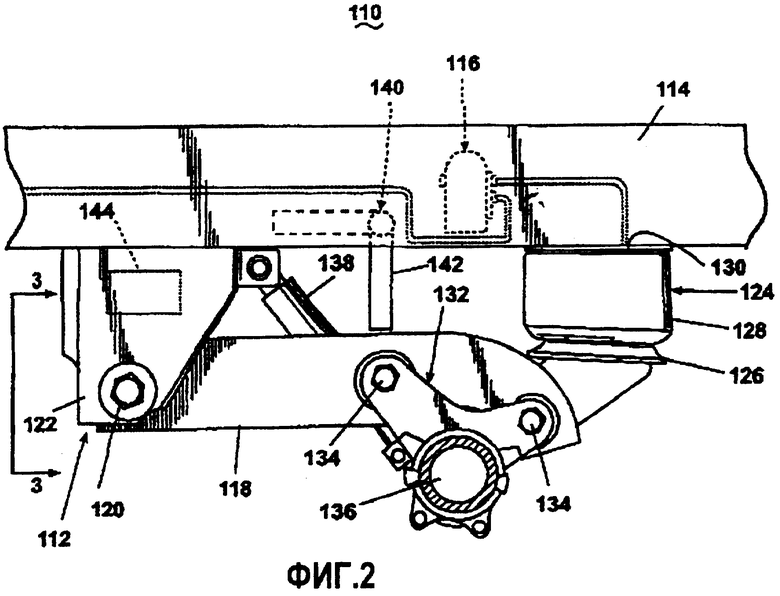
| US 4386791 А, 07.06.1983 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

