Область изобретения
Настоящее изобретение относится в общем случае к скважинам, используемым при добыче таких текучих сред, как нефть и газ. Конкретнее это изобретение относится к способу и системе выполнения различных операций и улучшения выработки в скважинах.
Существующий уровень техники
Различные операции выполняются в процессе бурения и завершения подземной скважины, а также во время выработки текучих сред из подземных формаций через завершенную скважину. Например, различные скважинные операции обычно выполняются на некоторой глубине внутри скважины, но управляются с поверхности.
Процесс пробивания отверстий является одним типом скважинной операции, которая используется для пробивания отверстий в обсадной трубе. Обычный процесс пробивания отверстий выполняется путем перемещения перфорирующего инструмента (например, перфорирующего орудия) в обсадной трубе в секции обсадной трубы, ближайшей к вызывающей интерес геологической формации. Перфорационный инструмент несет кумулятивные заряды, которые детонируются с помощью сигнала, переданного к зарядам с поверхности. Детонация зарядов создает отверстия в обсадной трубе и бетоне вокруг обсадной трубы, которые затем используются для установления жидкостной связи между геологической формацией и внутренним диаметром обсадной трубы.
Другим примером скважинной операции является установка пакеров внутри обсадной трубы скважины, чтобы изолировать конкретную секцию скважины или конкретную геологическую формацию. В этом случае пакер может быть помещен внутри обсадной трубы в скважине на желательной глубине и затем установлен с помощью инструмента установки, управляемого с поверхности. Другие скважинные операции, рассматриваемые как примеры, включают в себя помещение каротажных инструментов в конкретной геологической формации или на определенной глубине внутри обсадной трубы, а также помещение в обсадной трубе мостовых заглушек, заплаток обсадной трубы, трубок и связанных с ними инструментов.
Один решающий аспект любой скважинной операции включает в себя выяснение глубины в скважине, где должна быть проведена операция. Глубина обычно выясняется с помощью каротажа. Обычный каротаж скважины включает в себя непрерывные считывания с каротажного инструмента и ось, которая представляет глубины в скважине, на которых были сделаны замеры. Инструментальные замеры измеряют такие характеристики горной породы, как естественное гамма-излечение, электрическое сопротивление, плотность и акустические свойства. С помощью этих характеристик горных пород внутри скважины могут быть идентифицированы вызывающие интерес геологические формации, такие как нефте- и газоносные формации. Сначала создается каротажная диаграмма скважины как "открытого отверстия", которая становится репером для всех последующих каротажных диаграмм. После того, как в скважине размещены обсадные трубы, затем подготавливается каротажная диаграмма обсаженного отверстия и коррелируется, или увязывается с каротажной диаграммой открытого отверстия.
Используя каротажные диаграммы и механизм позиционирования, такой как тросовая линия или свернутые спиралью трубы, соединенные с одометром, устройство может быть помещено на желательной глубине внутри скважины и затем приведено в действие, как требуется для проведения скважинной операции. Одна проблема с обычными методами каротажа и позиционирования состоит в том, что сложно точно идентифицировать глубину инструмента и скоррелировать эту глубину с каротажными диаграммами открытого отверстия.
Наиболее близким к заявляемому изобретению по технической сущности и достигаемому при использовании результату в части способа выполнения операции обработки в скважине является способ выполнения операций в скважине, включающий обеспечение первого устройства в скважине, которое уникально идентифицируется и располагается на известной глубине в скважине, обеспечение второго устройства, выполненного с возможностью обнаружить первое устройство в скважине, транспортировку второго устройства через скважину и управление операцией в ответ на обнаружение первого устройства вторым устройством, при этом первое устройство представляет идентификационный радиоприбор, т.к. способен принимать сигналы в виде электромагнитных волн с частотой от 100 кГц до 500 МГц и посылать сигналы, в том числе сигнал идентификации кода, в виде электромагнитных волн с удвоенной частотой, а вторым устройством являются радиочастотный передатчик, обеспечивающий сигнал передачи для приема первым устройством, и приемник, принимающий ответный сигнал от первого устройства (US 6028534 А опубл.22.02.2000).
Однако известное устройство не обеспечивает требуемой точности определения глубина размещения инструмента.
Наиболее близким к заявляемому изобретению по технической сущности и достигаемому при использовании результату в части системы выполнения операции в скважине является система выполнения операции в скважине, содержащая инструмент обработки, выполненный с возможностью транспортировки через скважину, множество идентификационных приборов, расположенных внутри скважины на разнесенных интервалах и известных глубинах, устройство считывания, выполненное с возможностью транспортировки через скважину и приема сигналов идентификационных приборов для управления инструментом обработки в ответ на сигналы идентификационных приборов (Фридляндер Л.Я., Прострелочно-взрывная аппаратура и ее применение в скважинах, Москва, Недра, 1985, с.176-178).
Однако известная система выполнения операции в скважине характеризуется недостаточной точностью определения глубины размещения инструмента.
Задача, положенная в основу заявляемого изобретения, заключается в создании технического решения, свободного от указанных недостатков, присущих упомянутому патенту. Технический результат, достигаемый в процессе реализации заявляемого изобретения, заключается в повышении точности определения глубины размещения инструмента.
Задача, положенная в основу заявляемого изобретения в части способа выполнения операции обработки в скважине, с достижением упомянутого выше результата, решается тем, что в известном способе выполнения операции обработки в скважине, включающем расположение в скважине на известной глубине идентификационного радиоприбора, который уникально идентифицируется, транспортировку через скважину второго устройства, выполненного с возможностью обнаруживать радиоприбор, передачу радиоприбором ответных сигналов для его идентификации и управление операцией в ответ на обнаружение радиоприбора вторым устройством, радиоприбор устанавливают на манжете обсадной колонны, вместе со вторым устройством транспортируют через скважину инструмент обработки и управляют инструментом обработки в ответ на обнаружение радиоприбора вторым устройством, при этом в качестве идентификационной информации радиоприбора используют информацию о маркировке манжеты обсадной колонны и глубине;
- а также тем, что вторым устройством является радиочастотный передатчик, выполненный с возможностью обеспечивать сигнал передачи для приема первым устройством, и приемник, выполненный с возможностью принимать ответный сигнал от первого устройства;
- а также тем, что операция включает в себя процесс, выбранный из группы, состоящей из процессов пробивания отверстий, процессов установки пакера, процессов установки мостовых заглушек, процессов каротажа, процессов инспектирования, процессов химической обработки, процессов установки заплаток на обсадную трубу, процессов реактивного нарезания и процессов очистки.
Задача, положенная в основу заявляемого изобретения в части системы выполнения операции в скважине, с достижением упомянутого выше результата, решается тем, что в известной системе выполнения операции в скважине, содержащей инструмент обработки, выполненный с возможностью транспортировки через скважину, множество идентификационных приборов, расположенных внутри скважины на разнесенных интервалах и на известных глубинах, устройство считывания, выполненное с возможностью транспортировки через скважину, принимающее сигналы идентификационных приборов управления инструментом обработки в ответ на сигналы идентификационных приборов, упомянутые приборы являются идентификационными радиоприборами, выполненными с возможностью передачи ответных сигналов на устройство считывания для уникальной идентификации каждого радиоприбора, при этом идентификационные радиоприборы установлены на манжетах обсадной трубы скважины, а в качестве идентификационной информации каждого радиоприбора используют информацию о маркировке манжеты обсадной колонны и глубине;
- а также тем, что в системе устройство считывания прикреплено к инструменту обработки;
- а также тем, что система содержит транспортный механизм, выполненный с возможностью перемещения инструмента обработки и устройства считывания через скважину;
- а также тем, что в системе устройство считывания содержит приемник для приема ответных сигналов и передатчик для передачи сигналов передачи на идентификационные радиоприборы;
- а также тем, что в системе инструментом обработки является перфорационный инструмент, а сигнал управления управляет процессом пробивания отверстий;
- а также тем, что в системе инструментом обработки является инструмент установки пакера, а сигнал управления управляет процессом установки пакерного элемента;
- а также тем, что система содержит компьютер в сигнальной связи с устройством считывания, содержащий дисплей, управляемый сигналами от устройства считывания.
Фиг.1 показывает процесс пробивания отверстий из существующего уровня техники, происходящий в нефтегазовой скважине 10. Скважина 10 включает в себя шахтный бур 12 и обсадную трубу 14 внутри шахтного бура 12, окруженную бетоном 16. Скважина 10 проходит от поверхности 18 земли через геологические формации внутри земли, которые представлены как Зоны А, В и С. Обсадная труба 14 образуется трубчатыми элементами, такими как секции труб, соединенные друг с другом манжетами 20. В этом примере трубчатые элементы, которые формируют обсадную трубу 20, имеют длину около 40 футов, так что манжеты 20 обсадной трубы разнесены на расстояние 40 футов друг от друга. Однако трубчатые элементы меньшей длины (например, 20 футов) могут перемежаться с 40-футовыми, чтобы помочь определению глубины. Так, на фиг.1 две из манжет 20 обсадной трубы разнесены всего на 20 футов друг от друга.
Для выполнения операции пробивания отверстий перфорационный инструмент 22 опускается в обсадную трубу 14 на тросовой линии 24. Мачта 24 и шкивы 28 поддерживают тросовую линию 24, а блок 30 тросовой линии управляет тросовой линией 24. Блок 30 тросовой линии включает в себя приводной механизм 32, который опускает тросовую линию 24 и инструмент 22 в скважину 10 и поднимает тросовую линию 24 и инструмент 22 из скважины 10 по завершении процесса. Блок 30 тросовой линии также включает в себя одометр 34, который измеряет длину размотанной тросовой линии 24 по мере того, как она опускается в скважину 10, и приравнивает это измерение к глубине инструмента 22 внутри скважины.
В процессе формирования скважины 10 подготавливалась каротажная диаграмма 36 открытого отверстия. Каротажная диаграмма 36 открытого отверстия включает в себя различные инструментальные замеры, такие как замеры 38 гамма-излучения и замеры 40 спонтанного потенциала (СП), которые вычерчиваются как функция глубины в футах. Для простоты проиллюстрирована только часть каротажной диаграммы 36 открытого отверстия примерно от 7000 до 7220 футов. Однако в действительной практике в каротажную диаграмму может заноситься вся скважина 10 от поверхности 18 до дна скважины 10. Каротажная диаграмма 36 открытого отверстия позволяет специалисту выявить нефте- и газоносные формации внутри скважины 10 и наиболее продуктивные интервалы этих формаций. Например, основываясь на замерах 38 гамма-излучения и замерах 40 СП, определяется, что Зона А может содержать запасы нефти и газа. Таким образом, желательно пробить отверстия в обсадной трубе 14 в ее секции, ближайшей к Зоне А.
В дополнение к каротажной диаграмме 36 открытого отверстия, после помещения обсадной трубы в скважину 10 проводятся замеры 44 гамма-излучения обсаженного отверстия и может быть подготовлена каротажная диаграмма 42 манжет обсадной трубы. Каротажная диаграмма 42 манжет обсадной трубы именуется также как каротажная диаграмма УГП (каротажная диаграмма управления глубиной перфорирования). Каротажная диаграмма 42 манжет обсадной трубы может быть использована для идентификации секции обсадной трубы 14, ближайшей к Зоне А, где должны быть сделаны отверстия.
С помощью методов и оборудования, которые известны из существующего уровня техники, каротажная диаграмма 42 манжет обсадной трубы может быть точно скоррелирована или "увязана" с каротажной диаграммой 36 открытого отверстия. Однако с помощью обычных механизмов позиционирования, таких как блок 30 тросовой линии, может быть сложно точно поместить перфорационный инструмент 22 на требуемую глубину внутри скважины. Например, такие факторы, как натяжение, удлинение от тепловых эффектов, синусоидальные и спиральные изгибы и деформация тросовой линии 24 могут воздействовать на показания одометра и на точность показаний одометра относительно замеров одометра в открытом отверстии.
Таким образом, как показано на фиг.1, показания одометра, которые указывают глубину перфорирующего инструмента 22, могут быть не равны действительным глубинам, которые отражаются в каротажной диаграмме 36 открытого отверстия и каротажной диаграмме 42 манжет обсадной трубы. В этом примере показания одометра отличаются от глубин, идентифицированных в каротажной диаграмме 36 открытого отверстия и каротажной диаграмме 42 манжет обсадной трубы примерно на 40 футов. В этой ситуации, когда запускается перфорационный инструмент 22, в секции обсадной трубы 20, ближайшей к Зоне А, отверстия могут быть пробиты лишь частично или совсем не пробиты.
Из-за этих неточностей в позиционировании инструментов в существующем уровне техники разработаны коррелирующие методы каротажа стыков и каротажа троса. Например, один метод в существующем уровне техники использует электронные датчики стыков и электропроводную тросовую линию для определения длин между стыками и для корреляции показаний одометра тросовой линии с каротажной диаграммой манжет обсадной трубы. Хотя эти коррелирующие методы каротажа соединений и каротажа троса точны, они дороги и трудоемки. В частности, требуются дополнительные люди и оборудование на поверхности и расходы на дополнительный метраж тросовой линии.
Кроме неточностей позиционирования инструментов в вычисления глубины также вносят неточности вычислительные ошибки. Например, оператор устройства может сделать ошибки в вычислениях, думая об одном числе (например, 7100), когда реальное число может отличаться (7010). Также оператор инструмента может позиционировать инструмент путем компенсации желательной величины в направлении вверх по скважине, тогда как в действительности должно быть использовано направление вниз по скважине. Эти вычислительные ошибки связаны с усталостью, с погодой и проблемами связи в месте скважины.
Было бы желательно получить точные показания глубины для скважинных инструментов без необходимости в сложных и дорогих методах каротажа соединений и каротажа троса. Кроме того, было бы желательно управлять скважинными операциями и процессами без необходимости полагаться на неточные показания глубины, объединенные с вычислительными ошибками. Настоящее изобретение направлено на улучшенный способ и систему выполнения операций и процессов в скважинах, в которых глубины скважинных инструментов определяются точно и используются для управления операциями и процессами.
Другим ограничением обычных скважинных операций, которые зависят от измерений глубины, является то, что скважинные инструменты сначала должны быть позиционированы в скважине, а потом приведены в действие с поверхности. Это требует дополнительного времени и усилий от людей, работающих на скважине. Кроме того, приведение в действие с поверхности привлекает дополнительное оборудование и переменные в операциях. Было бы очень выгодно уметь управлять скважинными операциями без необходимости в приведении скважинных инструментов в действие с поверхности. С настоящим изобретением приведение скважинных инструментов в действие может осуществляться на требуемой глубине.
Сущность изобретений
В соответствии с настоящим изобретением обеспечены способ и система выполнения различных операций в скважинах и улучшения выработки в скважинах. Операции, рассматриваемые в качестве примера, которые могут выполняться с использованием этого способа, включают в себя процессы пробивания отверстий, процессы установки пакера, процессы установки мостовых заглушек, процессы каротажа, процессы инспектирования, процессы химической обработки, процессы помещения заплаток на обсадную трубу, процессы реактивного отрезания и процессы очистки. Каждый из этих процессов при выполнении в скважине в соответствии с данным способом улучшает скважину и улучшает выработку из скважины.
В иллюстративном варианте выполнения способ используется для выполнения процесса пробивания отверстий в нефте- и газодобывающей скважине. Скважина включает в себя шахтный бур и обсадную трубу скважины, проходящую с поверхности земли или морского дна в различные геологические зоны внутри земли. Обсадная труба скважины включает в себя отрезки труб, соединенные вместе с манжетами обсадной трубы.
Способ включает в себя начальную операцию обеспечения идентификационных приборов, разнесенных вдоль длины обсадной трубы скважины. Идентификационные приборы могут содержать активные или пассивные идентификационные радиоприборы, установленные на каждую манжету обсадной трубы скважины. Каждый идентификационный радиоприбор идентифицируется уникально и его глубина или положение внутри скважины точно устанавливается корреляцией с каротажными диаграммами скважины. Аналогично каждая манжета обсадной трубы уникально идентифицируется идентификационным радиоприбором, содержащимся в ней, и устанавливается запись скважины, включающая в себя глубину каждой манжеты обсадной трубы и идентификационный прибор.
Способ также включает в себя операцию обеспечения устройства считывания и транспортного механизма для перемещения устройства считывания через обсадную трубу скважины вблизи от идентификационных приборов. В иллюстративном варианте выполнения устройство считывания содержит радиочастотный передатчик и приемник, выполненные с возможностью обеспечивать сигналы передачи для приема идентификационными приборами. Идентификационные приборы выполнены с возможностью принимать сигналы передачи и передавать ответные сигналы обратно на устройство считывания. Транспортный механизм для устройства считывания может содержать тросовую линию, систему труб, спиральные трубы, роботизированный механизм, механизм жидкостного транспорта, такой как насос или вентилятор, установку свободного падения или установку контролируемого падения, такую как парашют.
Кроме передачи и приема сигналов от идентификационных приборов устройство считывания выполнено также с возможностью передавать сигналы управления для управления инструментом обработки как функцию ответных сигналов от идентификационных приборов. Например, устройство считывания может управлять перфорационным инструментом, выполненным с возможностью пробивать отверстия в обсадной трубе. Конкретно устройство считывания и перфорационный инструмент могут транспортироваться вместе через обсадную трубу мимо идентификационных приборов. Кроме того, устройство считывания может быть запрограммировано передавать сигнал управления для детонирования перфорационного инструмента после приема ответного сигнала от идентификационного прибора, расположенного на предварительно определенной глубине или положении внутри скважины. Иначе говоря, устройство считывания может быть запрограммировано управлять перфорационным инструментом в ответ на обнаружение конкретного идентификационного прибора.
В качестве других примеров устройство считывания может быть выполнено с возможностью управлять устройствами установки для пакеров, мостовых заглушек или заплаток обсадной трубы, управлять инструментальными замерами от каротажных инструментов и управлять реактивными резаками и аналогичными средствами. С использованием способа по изобретению реальная глубина инструмента обработки может быть выяснена в реальном времени устройством считывания с помощью ответных сигналов от идентификационных приборов. Соответственно нет необходимости выяснять глубину инструмента с помощью одометра и дорогих методов каротажа. Кроме того, вычислительные ошибки оператора уменьшаются, поскольку показания реальной глубины могут быть получены без необходимости в дополнительных вычислениях. Далее для некоторых процессов нет необходимости передавать сигнал на поверхность, так как устройство считывания может быть запрограммировано управлять процессом на месте внутри скважины.
Однако должно быть понятно, что способ по изобретению также может практиковаться путем передачи управляющих сигналов от устройства считывания на устройство управления или компьютер на поверхности, и управлением инструментом обработки с помощью устройства управления или компьютера. Кроме того, управление инструментом обработки может выполняться динамически, когда инструмент обработки перемещается через скважину вместе с устройством считывания, или статично путем остановки инструмента обработки на требуемой глубине. Далее способ по изобретению может быть использован для управления многоэтапным процессом или для управления инструментом, выполненным с возможностью осуществлять многие процессы. Например, объединенный инструмент установки пакера и пробивания отверстий может осуществлять процессы установки пакера и пробивания отверстий как функцию показаний реальной глубины, полученных с использованием способа по изобретению.
В иллюстративном варианте выполнения система включает в себя идентификационные приборы, установленные на манжеты обсадной трубы с интервалами по длине обсадной трубы скважины. Эти идентификационные приборы включают в себя программируемый элемент, такой как микросхема приемопередатчика, для приема и хранения идентификационной информации, такой как маркировка манжеты обсадной трубы и глубины. Каждое идентификационный прибор может быть выполнен как пассивное устройство, как активное устройство, имеющее антенну, или как пассивное устройство, которое может быть помещено в активное состояние путем передачи сигналов через текучие среды скважины.
Система также включает в себя устройство считывания и инструмент обработки, выполненные с возможностью транспортировки через обсадную трубу скважины. В дополнение к приемнику и передатчику устройство считывания включает в себя одно или более программируемых запоминающих устройств, таких как полупроводниковые микросхемы, выполненные с возможностью принимать и хранить информацию. Устройство считывания также включает в себя источник питания, такой как линия питания с поверхности или аккумулятор. Кроме того, устройство считывания включает в себя схему телеметрии для передачи управляющих сигналов, которые могут использоваться для управления инструментом обработки, и для обеспечения информации о глубине и другой информации операторам и оборудованию на поверхности. Система также может включать в себя компьютер, выполненный с возможностью принимать и обрабатывать сигналы управления и обеспечивать и хранить информацию в графическом или ином виде для операторов и оборудования скважин. Далее система может включать в себя устройство управления, выполненное с возможностью обрабатывать сигналы управления для управления инструментом обработки и различным оборудованием процесса. Устройство управления может размещаться на поверхности или на инструменте обработки для обеспечения замкнутой системы. Система может также транспортироваться к месту скважины в виде набора, а затем собираться на месте скважины.
Краткое описание чертежей
Фиг.1 является условной схемой скважинной операции из существующего уровня техники, выполняемой с помощью каротажа скважины и показаний одометра от механизма позиционирования инструмента.
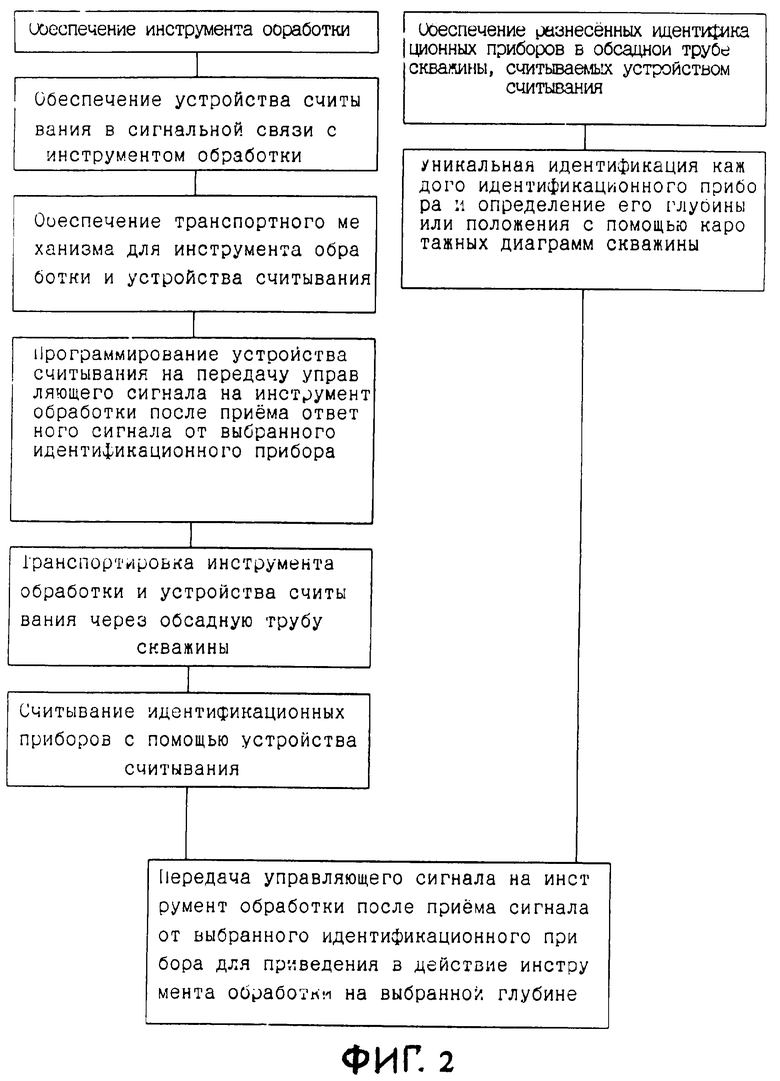
Фиг.2 является блок-схемой алгоритма, иллюстрирующей операции способа управления процессом пробивания отверстий в скважине по изобретению.
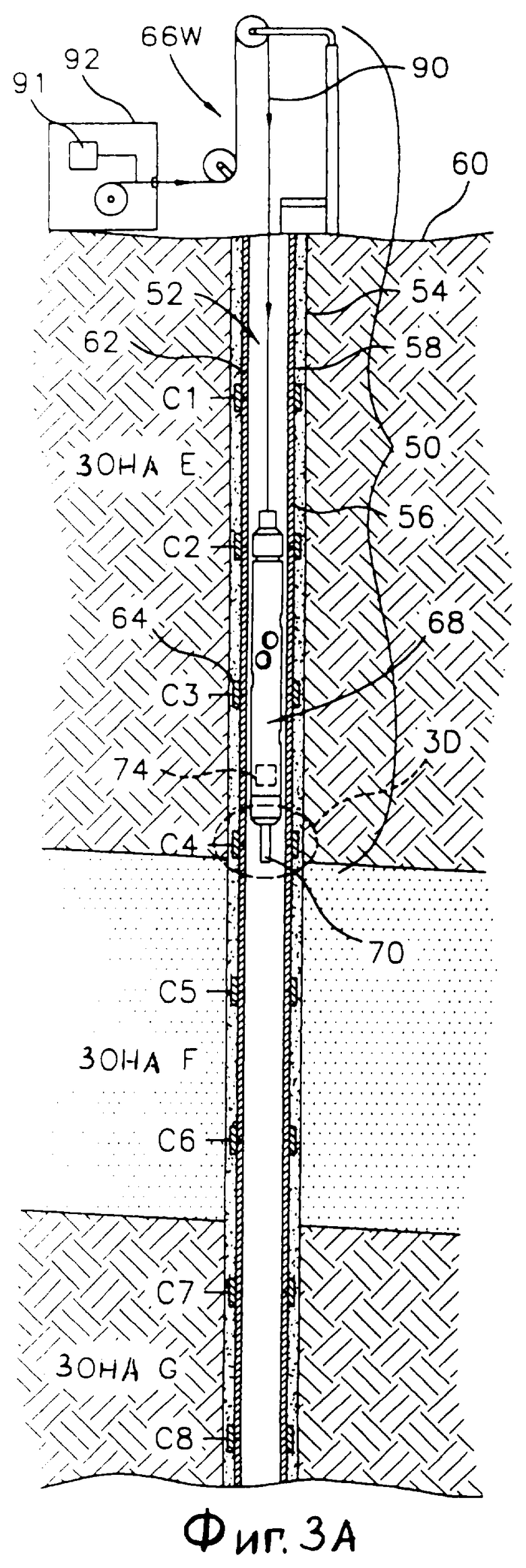
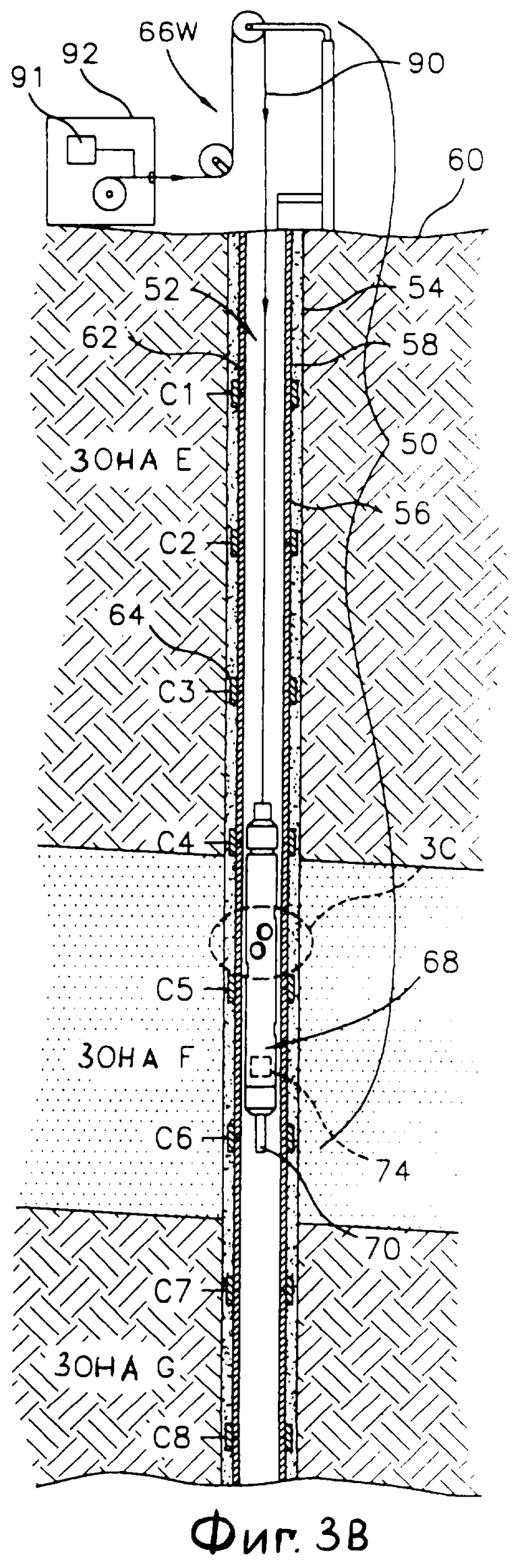
Фиг.3А и 3В являются условными видами в поперечном сечении, показывающими систему, построенную в соответствии с изобретением, для проведения процесса пробивания отверстий.
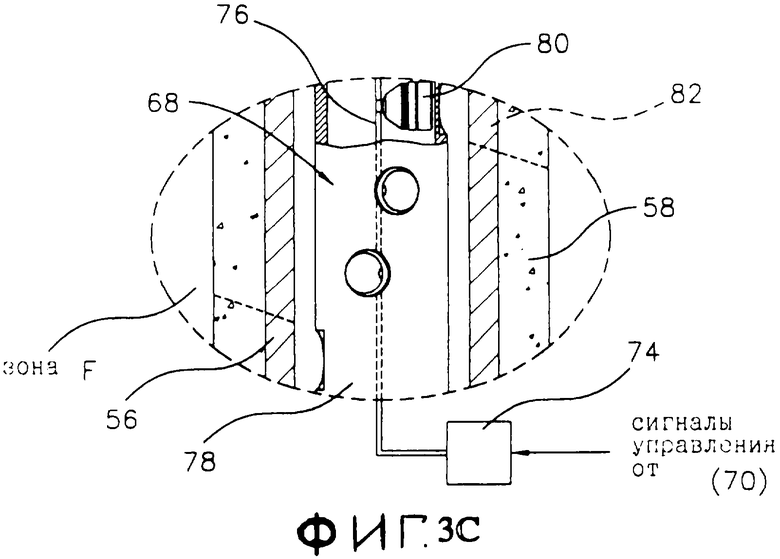
Фиг.3С является увеличенной частью фиг.3В, взятой по линии 3С сечения, иллюстрирующей перфорационный инструмент системы.
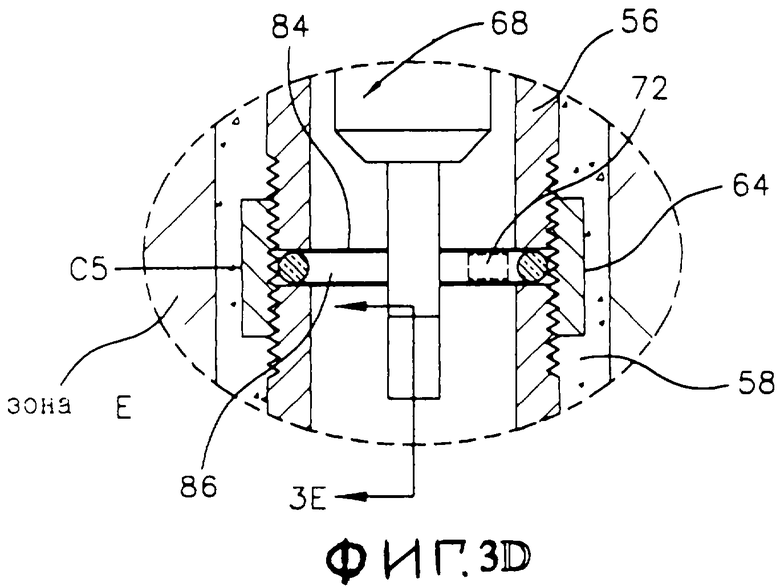
Фиг.3D является увеличенной частью фиг.3А, взятой по линии 3D сечения, иллюстрирующей устройство считывания и идентификационный прибор системы.
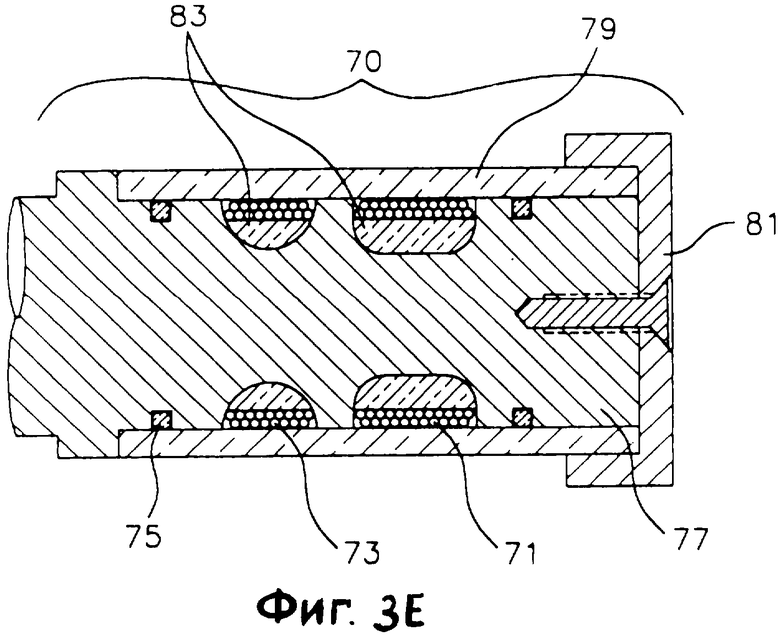
Фиг.3Е является увеличенным видом в поперечном сечении, сделанном по линии 3Е сечения на фиг.3D, иллюстрирующей часть устройства считывания.
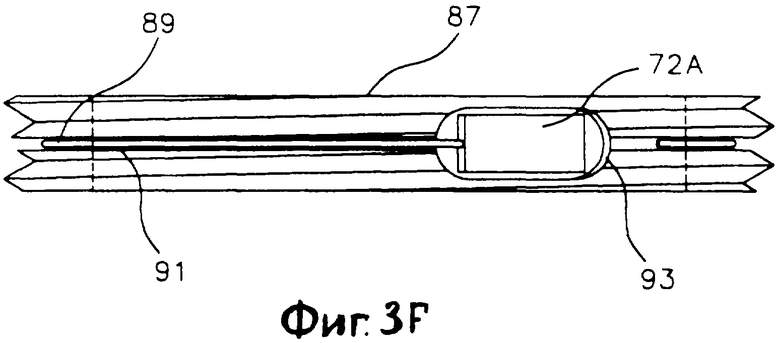
Фиг.3F является видом спереди и сбоку альтернативного выполнения активного устройства считывания и резьбового установочного устройства.
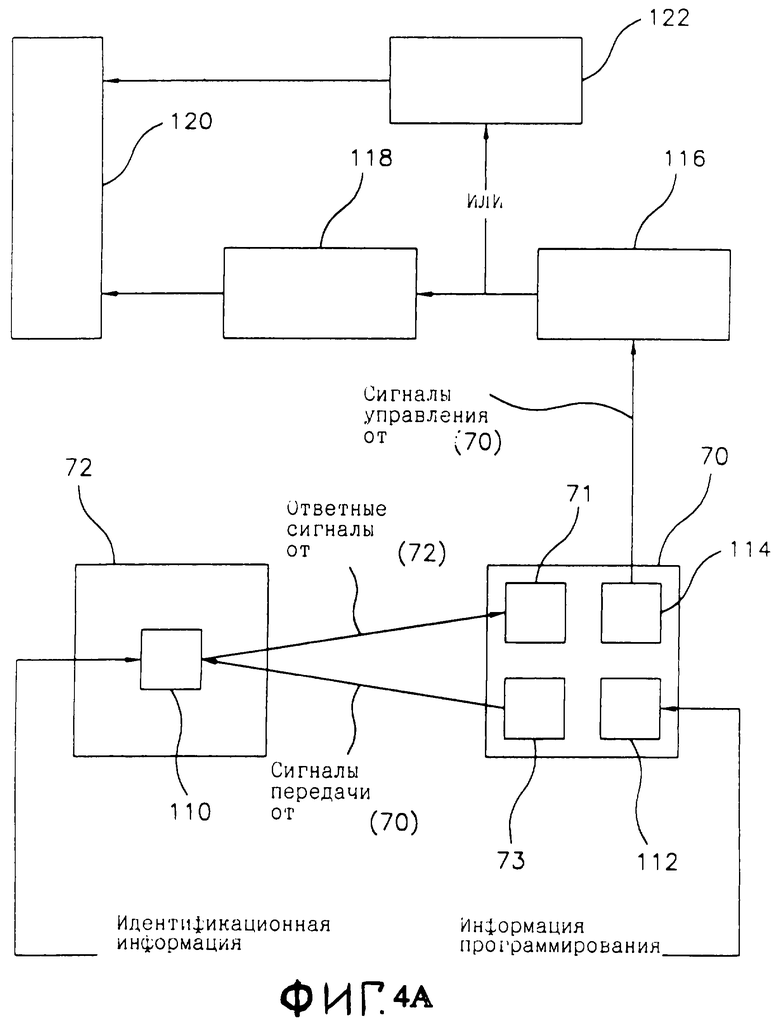
Фиг.4А является электрической схемой системы.
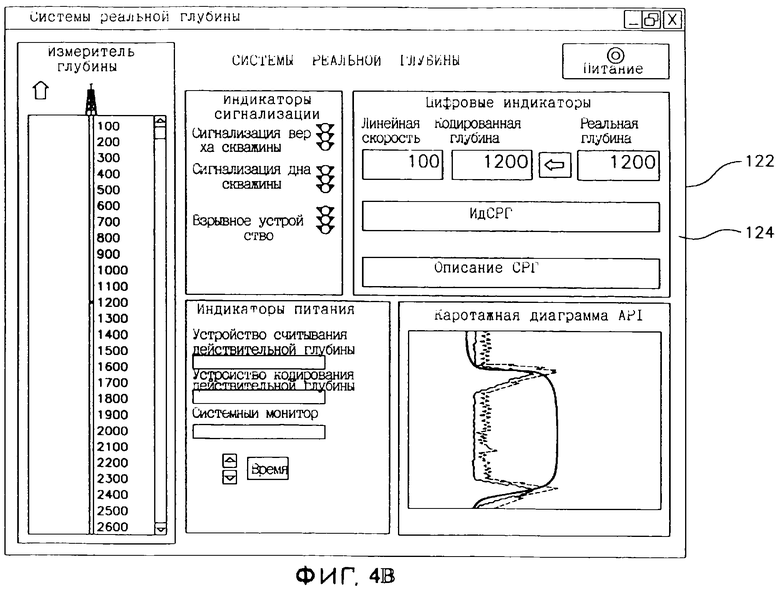
Фиг.4В является видом компьютерного экрана для компьютера системы.
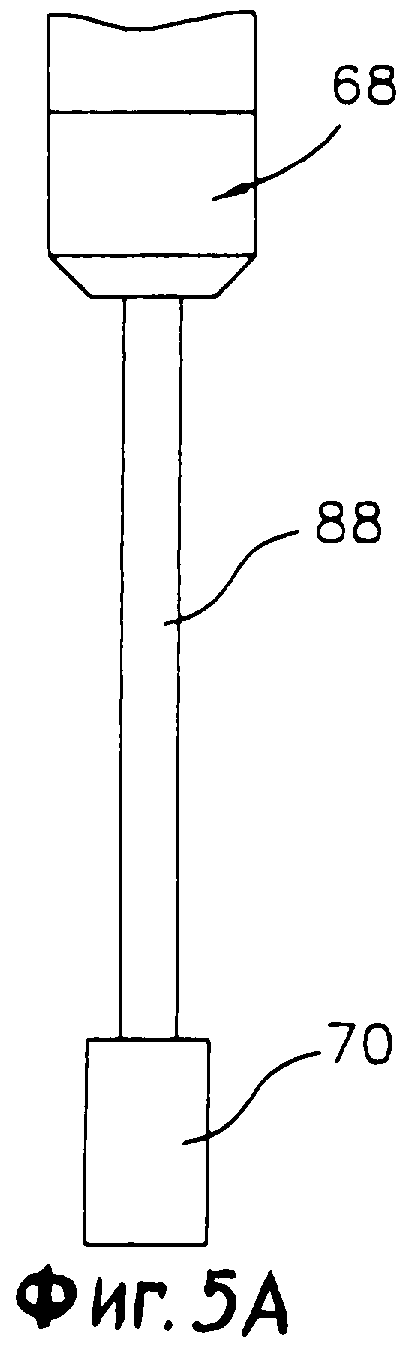
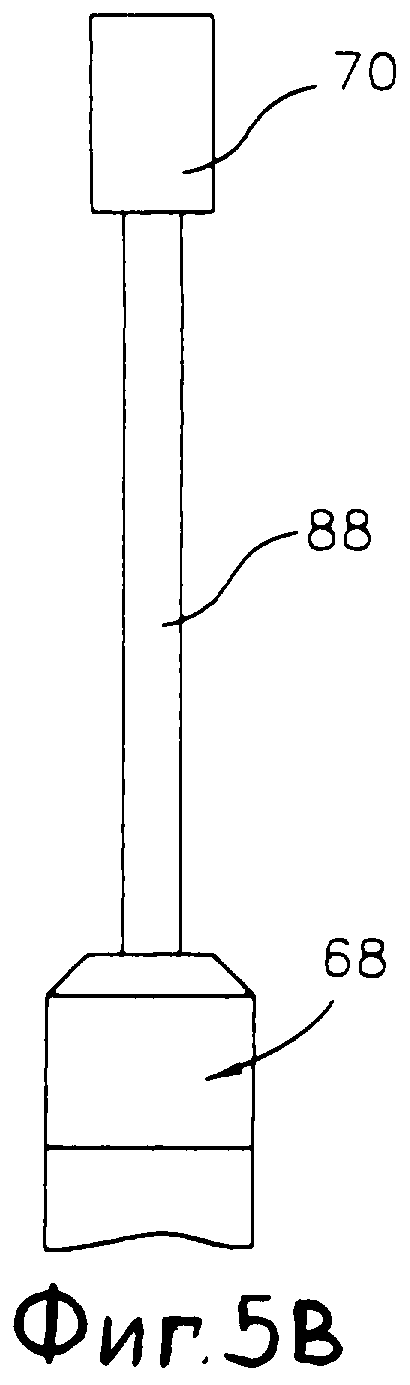
Фиг.5А и 5В являются условными видами, иллюстрирующими примерные элементы разделителя между для разнесения устройства считывания системы и перфорационного инструмента системы.
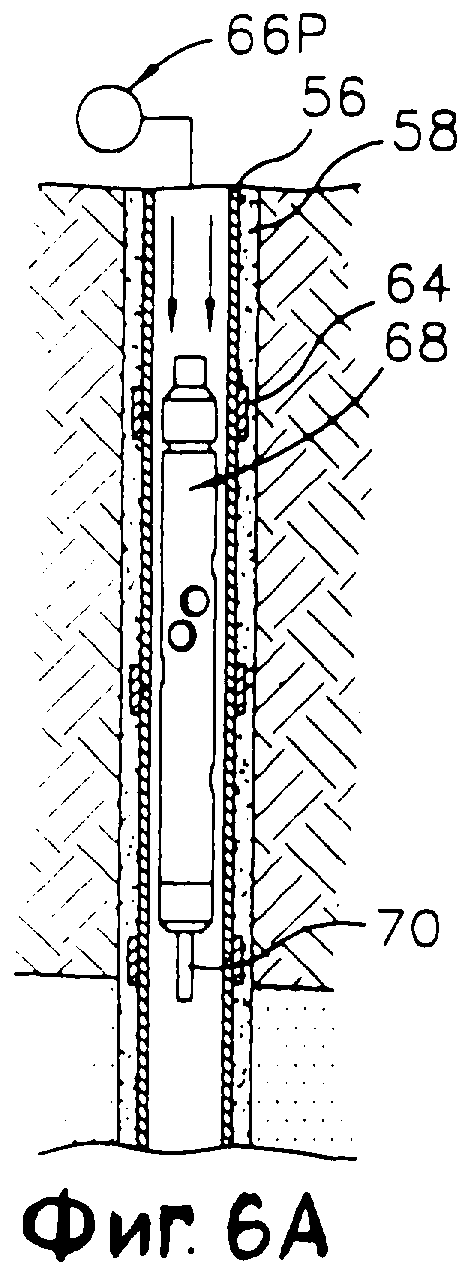
Фиг.6A-6D являются условными видами в поперечном сечении, иллюстрирующими различные альтернативные выполнения транспортных механизмов для системы.
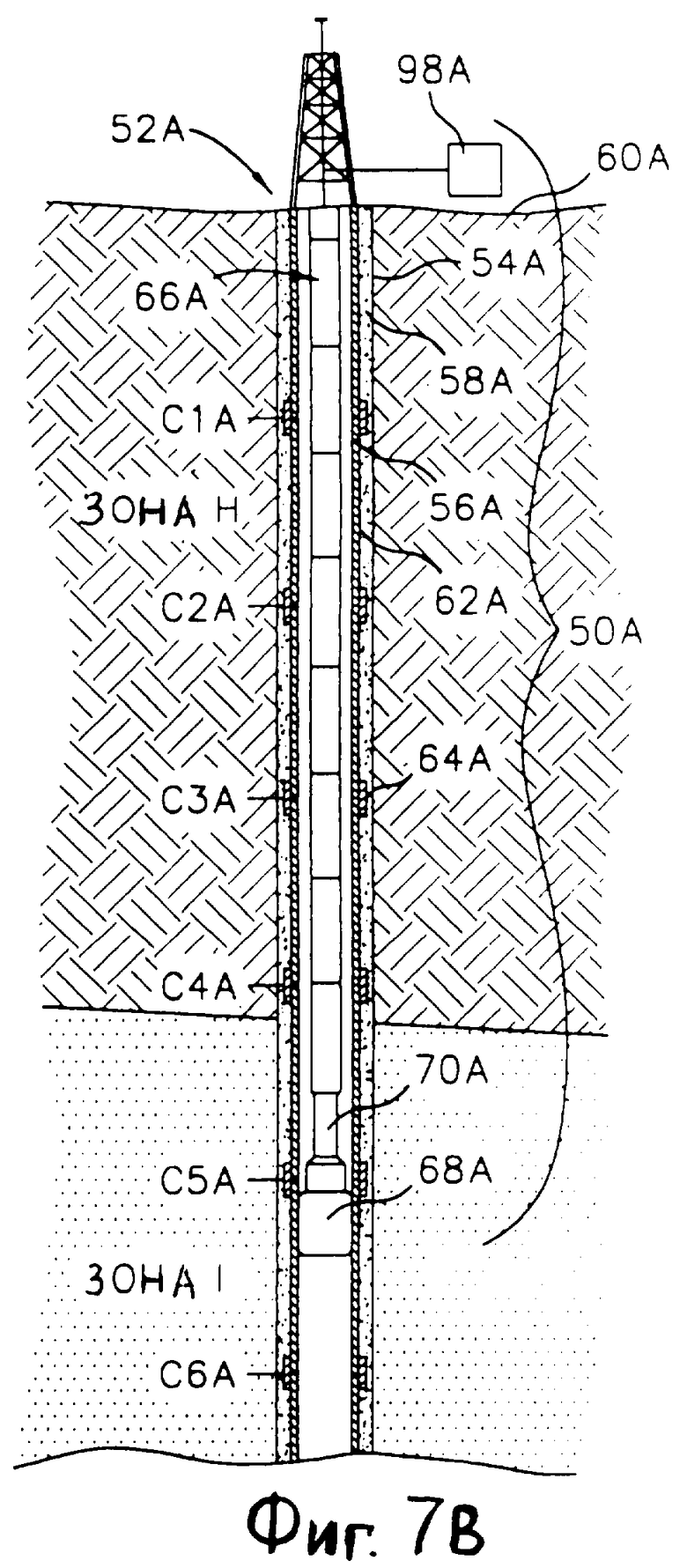
Фиг.7А и 7В являются условными видами в поперечном сечении, иллюстрирующими альтернативное выполнение системы, построенной в соответствии с изобретением, для выполнения процесса установки пакера в скважине.
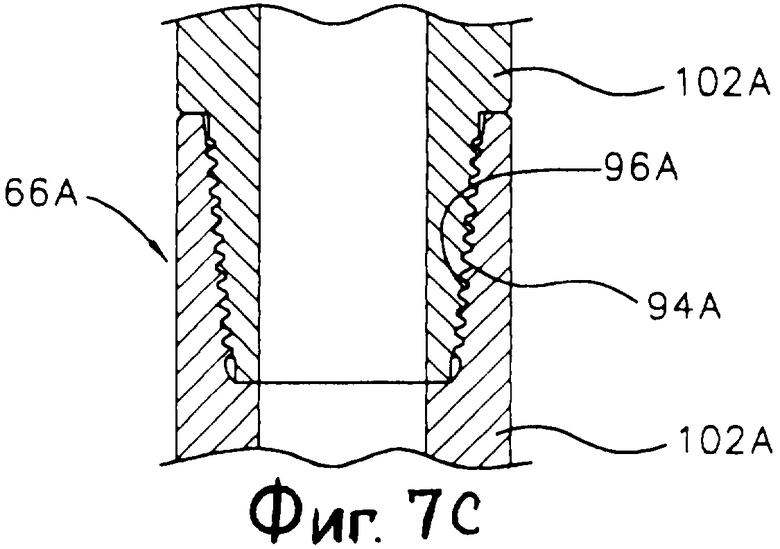
Фиг.7С является увеличенной частью фиг.7А, взятой по линии 7С сечения, иллюстрирующей резьбовое соединение цепочки труб альтернативного выполнения системы.
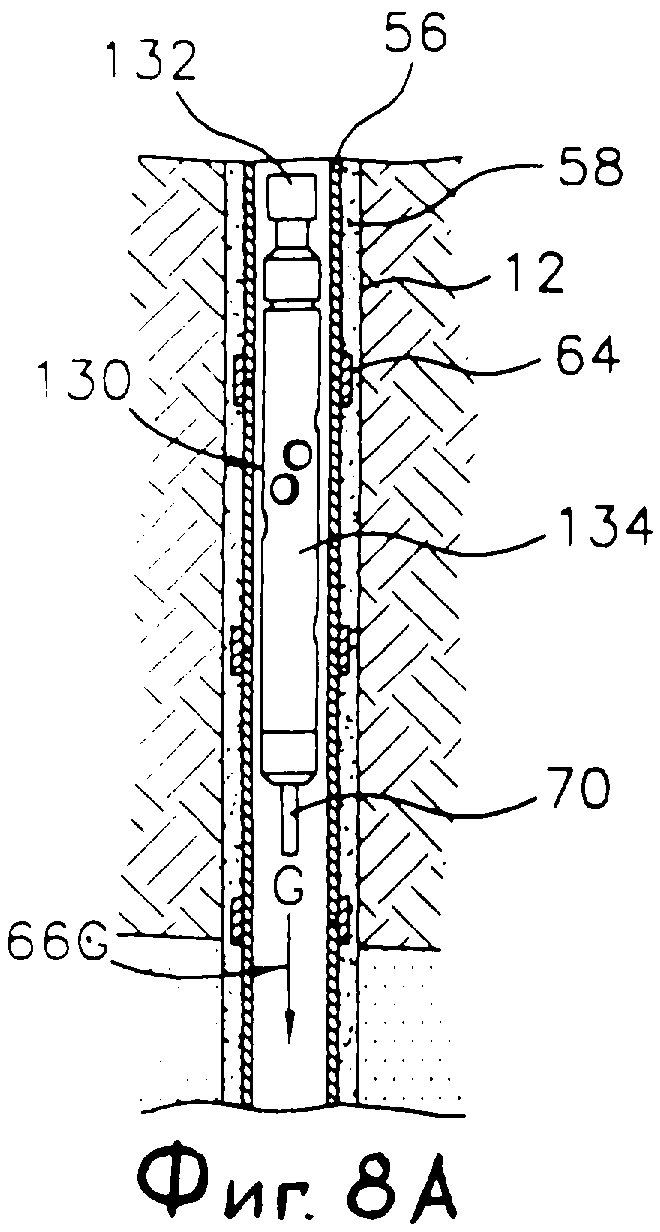
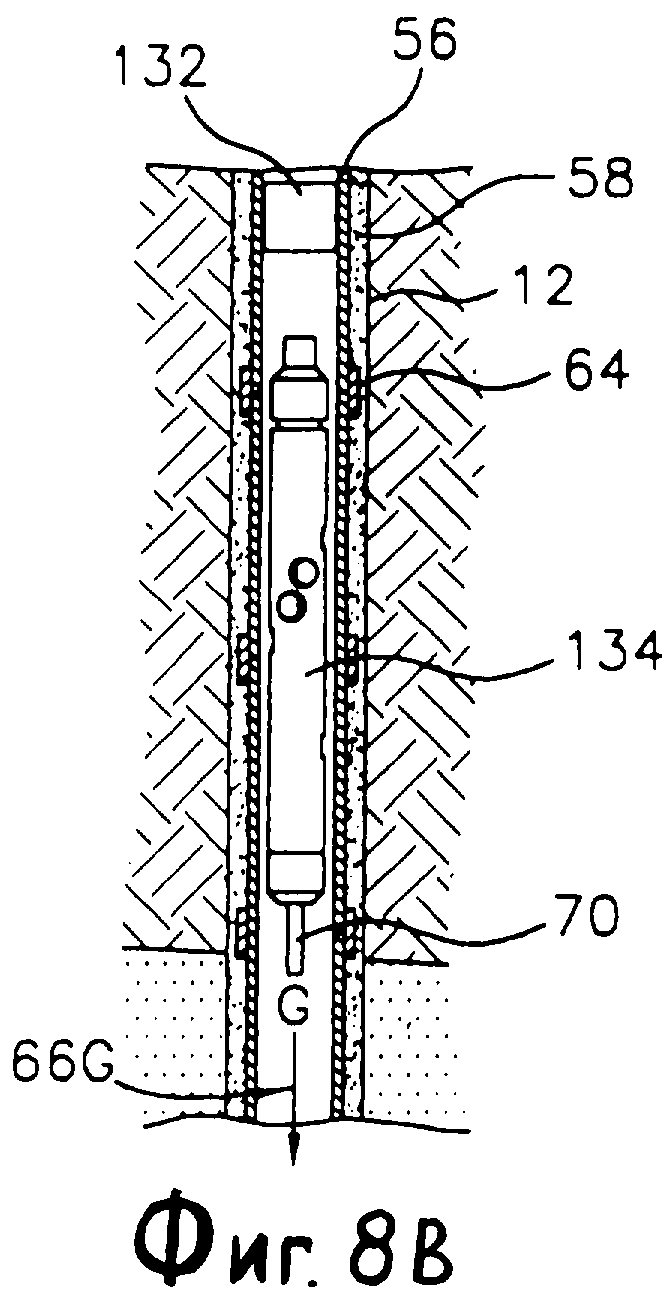
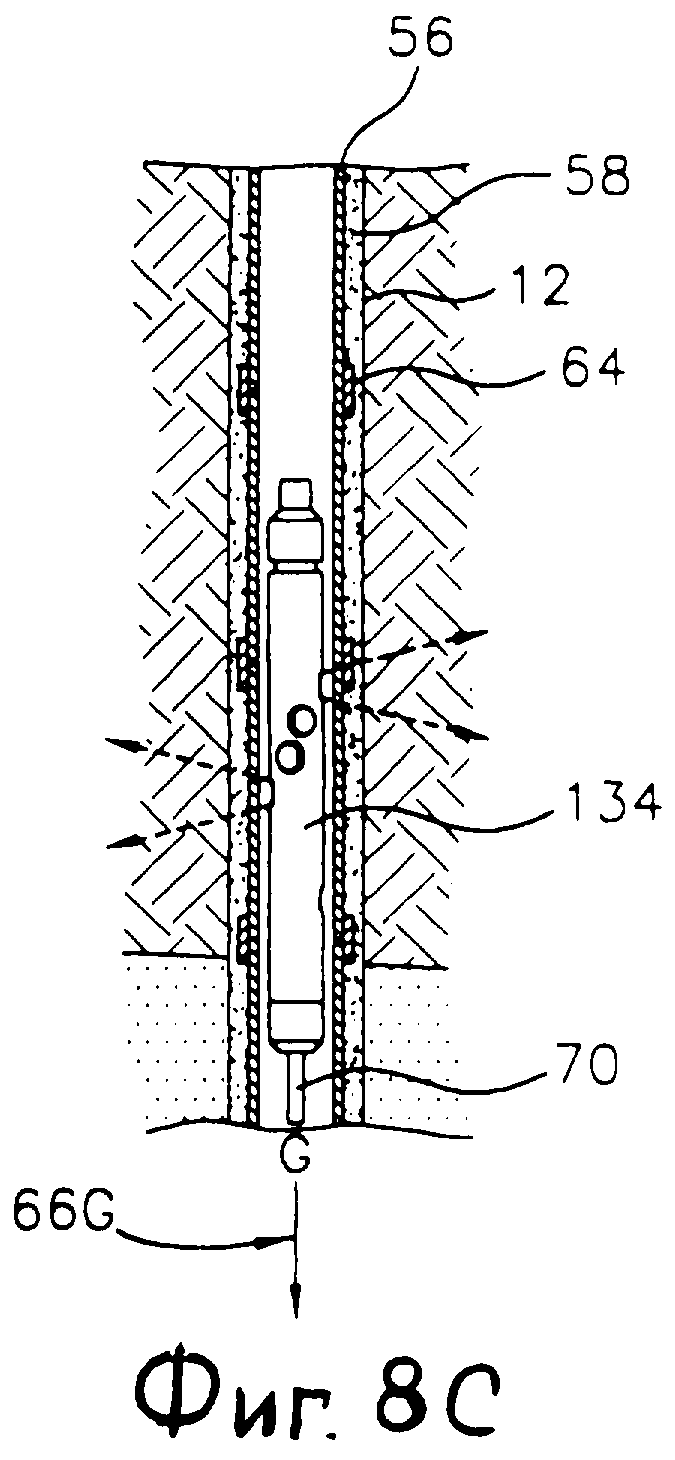
Фиг.8А-8С являются условными видами в поперечном сечении, показывающими альтернативное выполнение многоэтапного способа и системы для объединенного выполнения процессов установки пакера и пробивания отверстий по изобретению.
Подробное описание предпочтительного выполнения
На фиг.2 иллюстрируются крупные шаги в способе управления операцией или процессом в подземной скважине в соответствии с изобретением. Способ, рассматриваемый широко, включает в себя следующие операции:
А. Обеспечение инструмента обработки.
В. Обеспечение устройства считывания в сигнальной связи с инструментом обработки.
С. Обеспечение транспортного механизма для инструмента обработки и устройства считывания.
D. Обеспечение идентификационных приборов, разнесенных в обсадной трубе скважины, считываемых устройством считывания.
Е. Уникальная идентификация каждого идентификационного прибора и определение его глубины или положения в скважине с помощью каротажа скважины.
F. Программирование устройства считывания на передачу управляющего сигнала на инструмент обработки после приема ответного сигнала от выбранного идентификационного прибора.
G. Транспортировка инструмента обработки и устройства считывания через обсадную трубу скважины.
Н. Считывание идентификационных приборов с помощью устройства считывания.
I. Передача управляющего сигнала на инструмент обработки после приема сигнала от выбранного идентификационного прибора для приведения в действие инструмента обработки на выбранной глубине.
На фиг.3А-3 проиллюстрирована система 50, построенная в соответствии с изобретением. Система 50 установлена в подземной скважине 52, такой как нефте- и газодобывающая скважина. В этом выполнении система 50 выполнена с возможностью вести процесс пробивания отверстий в скважине 52. Процесс пробивания отверстий, выполняемый в соответствии с изобретением, обеспечивает улучшенную скважину 52 и улучшает выработку из скважины 52.
Скважина 52 включает в себя шахтный бур 54 и обсадную трубу 56 внутри шахтного бура 54, окруженную бетоном 58. Скважина 52 проходит от поверхности 60 земли через геологические формации внутри земли, которые представлены как Зоны Е, F и G. Поверхность 60 земли может быть землей или альтернативно такой конструкцией как нефтяная платформа, расположенная над водой. В иллюстративном выполнении скважина 52 проходит в основном вертикально от поверхности 60 через Зоны Е, F и G. Однако должно быть понятно, что способ также можно практиковать на наклонных скважинах и на горизонтальных скважинах.
Обсадная труба 56 содержит множество трубчатых элементов 62, таких как металлические трубы, соединенные друг с другом манжетами 64. Обсадная труба 56 имеет внутренний диаметр, приспособленный для передачи жидкости внутрь или наружу из скважины 52, и внешний диаметр, окруженный бетоном 58. Манжеты 64 могут содержать муфты с внутренней резьбой, приспособленные к скреплению с внешней резьбой на трубчатых элементах 62. Альтернативно манжеты 64 могут содержать свариваемые муфты, приспособленные для сварки с трубчатыми элементами 62.
В иллюстративном выполнении обсадная труба 56 также иллюстрируется как имеющая одинаковые внешний диаметр и внутренний диаметр по всей своей длине. Однако должно быть понятно, что обсадная труба 56 может меняться в размере на различных глубинах в скважине 52, что будет происходить из-за сборки трубчатых элементов различного диаметра. Например, обсадная труба 56 может содержать телескопическую структуру, в которой размер уменьшается по мере увеличения глубины.
На основании каротажной диаграммы скважины открытого отверстия (позиция 36 на фиг.1) или другой информации определяется, что зона F скважины 52 может содержать нефть и газ. Таким образом требуется пробить отверстия в обсадной трубе 56 рядом с Зоной F для установления жидкостной связи между Зоной F и внутренним диаметром обсадной трубы 56 скважины.
Для выполнения процесса пробивания отверстий система 50 включает в себя перфорационный инструмент 68 и устройство 70 считывания, находящееся в сигнальной связи с перфорационным инструментом 68. Система 50 также включает в себя множество идентификационных приборов 72 (фиг.3D), прикрепленных к манжетам 64 на обсадной трубе 56 и считываемых устройством 70 считывания. Кроме того, система 50 включает в себя транспортный механизм 66W для транспортировки перфорационного инструмента 68 и устройства 70 считывания через обсадную трубу 56 скважины к Зоне F. Если требуется, система 50 может быть доставлена к скважине 52 как набор, а затем собрана в скважине 52.
Как показано на фиг.3С, перфорационный инструмент 68 включает в себя детонатор 74 (показан схематически) и детонаторный шнур 76 в сигнальной связи с детонатором 74. Детонатор 74 может содержать коммерчески доступный ударный или электрический детонатор, выполненный с возможностью приведения его в действие сигналом от устройства 70 считывания. Аналогично детонаторный шнур 76 может содержать коммерчески доступную составляющую. Детонатор 74 и детонаторный шнур 76 выполнены с возможностью вырабатывать и применять пороговую детонирующую энергию для инициирования детонирующей последовательности перфорационного инструмента 68. В иллюстративном выполнении детонатор 74 расположен на перфорационном инструменте 68 или внутри него.
Как показано на фиг.3С, перфорационный инструмент 68 также включает в себя один или более носителей 78 заряда, каждый из которых содержит множество зарядных установок 80. Носители 78 заряда и зарядные установки 80 могут быть аналогичны коммерчески доступным орудиям пробивания отверстий или строиться из них. При детонации каждая зарядная установка 80 приспособлена взорвать отверстие 82 через обсадную трубу 56 и бетон 58 и внутрь в горную породу или другой материал, который формирует Зону F.
Как показано на фиг.3D, каждая манжета 64 включает в себя идентификационный прибор 72. Каждый идентификационный прибор 72 может быть прикреплен на упругое кольцевое уплотнение 86, расположенное в канавке 84 внутри каждой манжеты 64.
В иллюстративном выполнении идентификационные приборы 72 содержат пассивные идентификационные радиоприборы (ПИРП) (PRID). ПИРП коммерчески доступны и широко используются в таких применениях, как идентификация товаров в магазинах и книг в библиотеках. ПИРП включают в себя схему, которая выполнена с возможностью резонировать после приема радиочастотной энергии из радиопередачи соответствующей частоты и интенсивности. Пассивные ПИРП не требуют источника питания, так как энергия, полученная от сигнала передачи, обеспечивает энергию для ПИРП, чтобы передать ответный сигнал в процессе приема сигнала передачи.
Идентификационный прибор 72 включает в себя интегральную микросхему, такую как микросхема приемопередатчика, имеющую свойства запоминающего устройства. Эта интегральная микросхема может быть выполнена с возможностью принимать РЧ (радиочастотные) сигналы для кодирования и хранения данных на основе сигналов. В процессе операции кодирования данных каждый идентификационный прибор 72 может быть уникально идентифицирован, так что каждая манжета 64 также уникально идентифицируется. Эта идентификационная информация показана позициями С1-С8 на фиг.3А и 3В. Кроме того, глубина каждой манжеты 64 может быть выяснена с помощью каротажа скважины, как было объяснено ранее и показано на фиг.1. Информация о глубине затем может быть скоррелирована с информацией идентификации, закодированной в идентификационном приборе 72. Таким образом, может быть создана запись, идентифицирующая каждую манжету 64 и ее реальную глубину в скважине 52.
Альтернативно, как показано на фиг 3F, идентификационный прибор 72 может быть в виде активного устройства, имеющего отдельный источник питания, такой как батарея. Кроме того, идентификационный прибор 72А может включать в себя антенну 89 для передачи сигналов. Альтернативно идентификационный прибор (не показан) может быть выполнен с возможностью передавать сигналы через жидкость скважины или другую среду передачи внутри скважины 52. Такой идентификационный прибор далее описан в упомянутой ранее указанной заявке на патент №09/286650, которая включена сюда посредством ссылки.
Как показано также на фиг.3F, идентификационный прибор 72А может содержаться в резьбовом установочном устройстве 87. Резьбовое установочное устройство 87 может содержать жесткий непроводящий материал, такой как пластик. Резьбовое установочное устройство 87 выполнено с возможностью ввинчиваться в средних частях манжеты 64 обсадной трубы (фиг.3D) и удерживаться между соседними трубчатыми элементами обсадной трубы 56. Резьбовое установочное устройство 87 включает в себя канавку 91 по всей окружности для антенны 89 и выступ 93 для идентификационного прибора 72А. Если необходимо, антенна 89 и идентификационный прибор 72А могут удерживаться в канавке 91 и выступе 93 с использованием клеящего вещества или подходящего зажима.
На фиг.3Е более подробно показано устройство 70 считывания. Устройство 70 считывания выполнено с возможностью передавать РЧ-сигналы передачи на выбранной частоте на идентификационные приборы 72 и принимать ответные РЧ-сигналы от идентификационных приборов 72. В этом случае устройство 70 считывания включает в себя базовый элемент 77, имеющий передатчик 73, выполненный с возможностью передавать сигналы передачи первой частоты на идентификационные приборы 72. Устройство 70 считывания включает в себя приемник 71 на базовом элементе 77, выполненный с возможностью принимать сигналы второй частоты от идентификационных приборов 72.
Предпочтительно передатчик 73 выполнен с возможностью обеспечивать относительно слабые сигналы передачи, чтобы только идентификационный прибор 72 в непосредственной близости (например, один фут) от устройства 70 считывания принимал сигналы передачи. Альтернативно антенна устройства 70 считывания может быть выполнена с возможностью обеспечивать высоконаправленные сигналы передачи, что сигналы передачи исходили точно горизонтально из устройства 70 считывания. Соответственно сигналы передачи от устройства 70 считывания принимаются только единственным идентификационным прибором 72, когда устройства считывания проходят в непосредственной близости от единственного идентификационного прибора 72.
В дополнение к передатчику 73 и приемнику 71 устройство 70 считывания включает в себя футляр 79, выполненный из неэлектропроводного материала, такого как пластик или стеклопластик. Устройство 70 считывания также включает в себя уплотнительные кольца 75 на базовом элементе 77 для герметизации футляра 79 и крышечный элемент 81, прикрепленный к базовому элементу 77, который прикрепляет футляр 79 к базовому элементу 77. Кроме того, устройство 70 считывания включает в себя разделительные элементы 83, сформированные из неэлектропроводного материала, такого как феррит, керамика или пластик, которые отделяют передатчик 73 и приемник 71 от базового элемента 77. В иллюстративном выполнении базовый элемент 77 обычно цилиндрический по форме, а разделительные элементы 83 содержат обоймы с поперечным сечением в виде полумесяца или контура.
На фиг.4А показана электрическая схема для системы 50. Как условно показано, каждый идентификационный прибор 72 включает в себя запоминающее устройство 110 в виде кристалла программируемой интегральной микросхемы, такой как кристалл приемопередатчика, выполненной с возможностью приема и хранения идентификационной информации. Как было объяснено выше, идентификационная информация может уникально идентифицировать каждую манжету 64 обсадной трубы алфавитно-цифровым, цифровым или другим обозначением. Кроме того, используя предварительно подготовленные каротажные диаграммы скважины, может быть выяснена глубина каждой уникально идентифицированной манжеты 64 обсадной трубы.
Как показано на фиг.4А, устройство 70 считывания включает в себя передатчик 73 для передачи сигналов передачи на идентификационные приборы 72 и приемник 71 для приема ответных сигналов от идентификационных приборов 72. Устройство 70 считывания может питаться от подходящего источника питания, такого как батарея или источник питания на поверхности. Кроме того, устройство 70 считывания включает в себя запоминающее устройство 112, такое как один или более кристаллов интегральной микросхемы, выполненных с возможностью принимать и хранить информацию программирования. Устройство 70 считывания также включает в себя телеметрическую схему 114, выполненную с возможностью передавать сигналы управления в цифровой или другой форме, с помощью программного обеспечения 116 на устройство 118 управления, или альтернативно на компьютер 122.
Понятно, что в устройство 118 управления или в компьютер 122 может включаться программное обеспечение 116. Кроме того, компьютер 122 может содержать портативное устройство, такое как ноутбук, которое может быть заранее запрограммировано и доставлено к месту скважины. Также, как будет объяснено далее, компьютер 122 может включать в себя дисплей для отображения информации, принятой от устройства 70 считывания. Устройство 118 управления или компьютер 122 взаимодействует со схемой 120 управления инструментом, которая выполнена с возможностью управлять перфорационным инструментом 68, как требуется.
В иллюстративном выполнении схема 120 управления инструментом находится в сигнальной связи с детонатором 74 (фиг.3С) перфорационного инструмента 68. Схема 120 управления инструментом может быть размещена на перфорационном инструменте 68, на устройстве 70 считывания или на поверхности. Устройство 70 считывания запрограммировано передавать управляющие сигналы на схему 120 управления инструментом как функцию ответных сигналов, принятых от идентификационных приборов 72. Например, в процессе пробивания отверстий, показанном на фиг.3А и 3В, соединение С4 расположено рядом с верхним уровнем или входной точкой в Зону F. Поскольку желательно привести в действие перфорационный инструмент 68, когда он находится в зоне F, устройство 70 считывания может быть запрограммировано передавать управляющие сигналы приведения в действие через схему 120 управления инструментом на детонатор 74 (фиг.3С), когда это устройство проходит соединение С4 и принимает ответные сигналы от идентификационного прибора 72, содержащегося в соединении С4. Поскольку соединение С4 уникально идентифицировано идентификационным прибором 72, содержащимся в нем, и глубина соединения С4 предварительно идентифицирована с использованием каротажных диаграмм скважины, процесс пробивания отверстий может быть начат в реальном времени, когда перфорационный инструмент 68 проходит соединение С4 и входит в секцию обсадной трубы 56 скважины, ближайшей к Зоне F.
Однако для того, чтобы гарантировать, что детонирующая последовательность начата в правильное время, должны быть учтены дополнительные факторы. Например, перфорационный инструмент 68 и устройство 70 считывания могут транспортироваться через обсадную трубу 56 скважины с определенной скоростью (V). Кроме того, устройство 70 считывания требует определенного периода времени (Т1) для передачи сигналов передачи на идентификационный прибор 72 в соединении С4 и приема ответных сигналов от идентификационного прибора 72 в соединении С4. Кроме того, требуется определенный период времени (Т2) для передачи сигналов на схему 120 управления инструментом и на детонатор 74 (фиг.3С). Далее зарядные установки 80 требуют определенного периода времени (Т3) до того, как произойдет детонация, взрыв и пробивание отверстия в обсадной трубе 56. Все эти факторы могут быть учтены при определении того, какой идентификационный прибор 72 и в какой манжете 64 обсадной трубы будет использован, чтобы заставить устройство 70 считывания передать сигналы управления приведением в действие через схему 120 управления инструментом на детонатор 74 (фиг.3С).
Для обеспечения должной синхронизации для детонирующей последовательности скорость (V) перфорационного инструмента 68 и устройства 70 считывания могут быть выбраны, как требуется. Кроме того, как показано на фиг.5А и 5В, разделительный элемент 88 может быть использован для отнесения перфорационного инструмента 68 от устройства 70 считывания на заранее определенное расстояние (D). Как показано на фиг.5А, перфорационный инструмент 68 может находиться над устройством 70 считывания (то есть ближе к поверхности 60), или альтернативно, как показано на фиг.5В, может быть ниже устройства 70 считывания (то есть дальше от поверхности 60).
Как альтернатива динамической детонирующей последовательности перфорационный инструмент 68 может останавливаться, когда достигнута требуемая глубина, и выполняться статическая детонирующая последовательность. Например, устройство 70 считывания может быть запрограммировано посылать сигнал остановки перфорационного инструмента 68, когда он достигнет соединения С6. В этом случае сигнал от устройства 70 считывания может быть использован для управления шкивом 92 тросовой линии и остановки тросовой линии 90. Детонирующая и взрывающая последовательности могут быть начаты сигналами от схемы 120 управления инструментом, когда перфорационный инструмент 68 находится в неподвижном состоянии на требуемой глубине.
Как показано на фиг.4В, сигналы от устройства 70 считывания могут быть использованы для выработки визуального дисплея 124, такого, как экран компьютера 122, который может просматриваться оператором на поверхности. Дисплей 124 называется "Системы реальной глубины" (СРГ) (TDS) и включает в себя источник питания для подачи питания на устройство 70 считывания и другие составляющие системы. Дисплей 124 также включает в себя "Измеритель глубины", который показывает глубину устройства 70 считывания (или перфорационного инструмента 68) внутри скважины 52. Дисплей 124 также включает в себя "Индикаторы сигнализации", включая индикатор "Сигнализация верха скважины", индикатор "Сигнализация дна скважины" и индикатор "Взрывное устройство". "Индикаторы сигнализации" аналогичны стоп-сигналам с зеленым, желтым и красным цветами для отображения меняющихся состояний.
Дисплей 124 также включает в себя "Индикаторы питания", содержащие индикатор питания "Устройство считывания действительной глубины", индикатор питания "Устройство кодирования действительной глубины" и индикатор питания "Системный монитор". Кроме того, дисплей включает в себя различные "Цифровые индикаторы". Например, цифровой индикатор "Линейная скорость" показывает скорость, с которой устройство 70 считывания и перфорационный инструмент 68 транспортируются через обсадную трубу 56 скважины. Цифровой индикатор "Кодированная глубина" показывает глубину каждого идентификационного прибора 72, когда устройство 70 считывания проходит идентификационные приборы 72. Индикатор "Реальная глубина" показывает действительную глубину устройства 70 считывания в реальном времени, когда оно транспортируется через обсадную трубу 56 скважины.
Дисплей 124 также включает в себя индикатор "ИдСРГ" (идентификатор системы реальной глубины), который показывает идентификационный номер для каждого идентификационного прибора 72. Кроме того, дисплей 124 включает в себя индикатор "Описание СРГ", который далее описывает каждый идентификационный прибор 72 (например, положение в конкретной составляющей или зоне). Дисплей 124 также включает в себя индикатор "Время", который может быть использован как привод времени (вперед или назад) в целях демонстрации или повторного просмотра. Наконец, дисплей включает в себя индикатор "Каротажная диаграмма API", который показывает информацию каротажной диаграммы, такую как замеры гамма-излучения или СП из описанных ранее каротажных диаграмм скважины, скоррелированных с "Цифровыми индикаторами" по глубине.
Возвращаясь к фиг.3А и 3В, в выполнении, показанном на них, транспортный механизм 66W включает в себя тросовую линию 90, приводимую в действие шкивом 92 тросовой линии, практически таким же, как ранее описанный и показанный на фиг.1. Тросовая линия 90 может содержать скользящую линию, электрическую линию, плетеную линию или спиральные трубы. Если устройство 118 управления или компьютер 122 расположены на поверхности 60, тросовая линия 90 может быть использована для установления сигнальной связи между устройством 70 считывания и устройством 118 управления или компьютером 122.
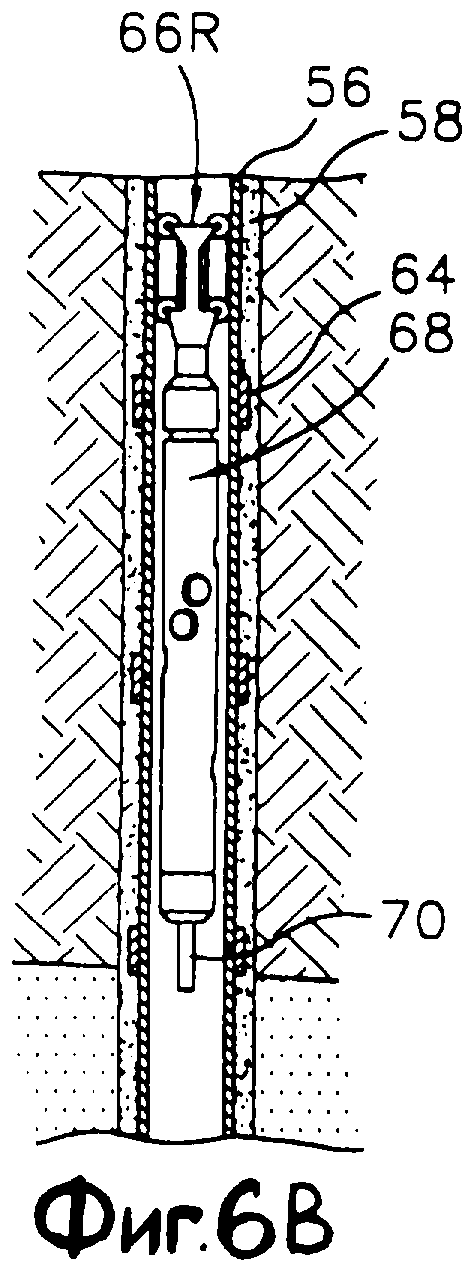
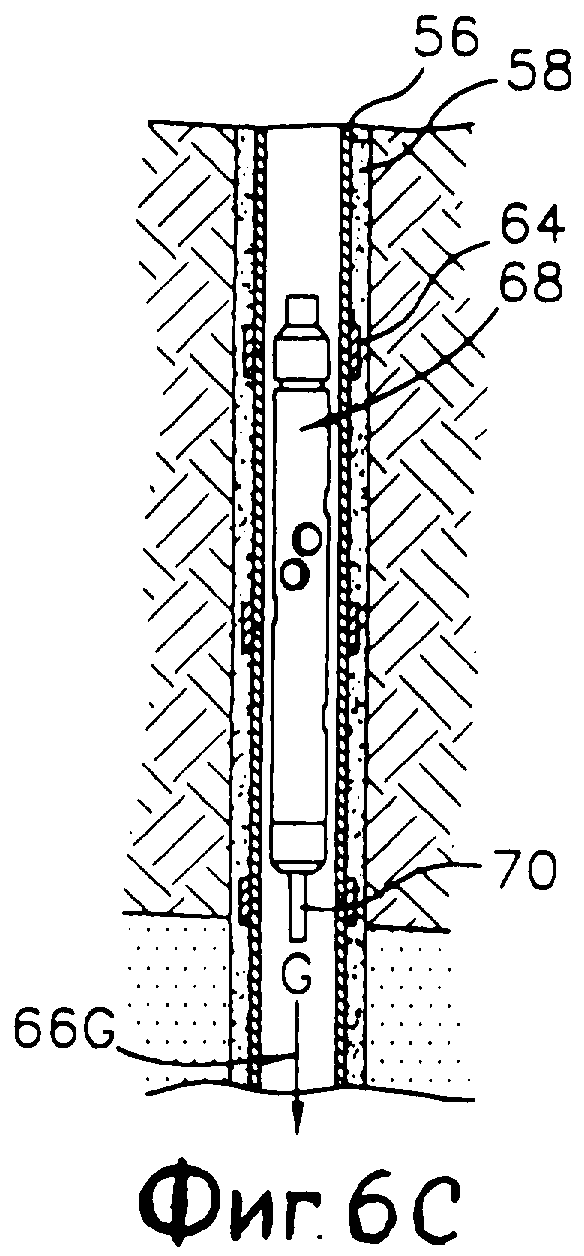
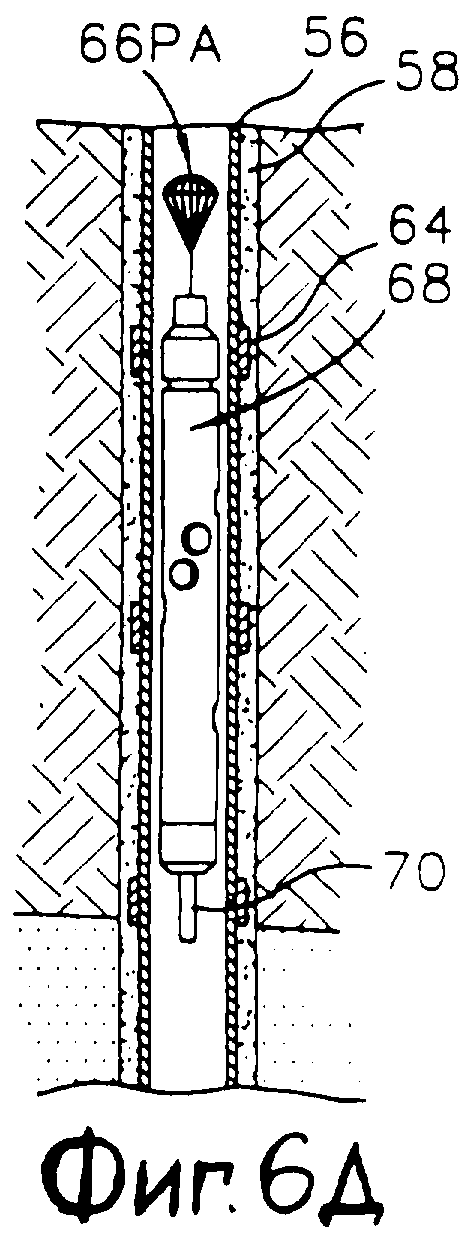
На фиг.6A-6D показано альтернативное выполнение транспортных механизмов для транспортировки перфорационного инструмента 68 и устройства 70 считывания через обсадную трубу 56. На фиг.6А транспортный механизм 66Р содержит насос для закачивания транспортировочной жидкости через внутренний диаметр обсадной трубы 56. Закачанная транспортировочная жидкость затем транспортирует перфорационный инструмент 68 и устройство 70 считывания через обсадную трубу 56. На фиг.6В транспортный механизм 66R содержит одно или более роботизированных устройств, прикрепленных к перфорационному инструменту 68 и устройству 70 считывания и выполненных с возможностью транспортировать перфорационный инструмент 68 и устройство 70 считывания через обсадную трубу 56. На фиг.6С транспортный механизм 66G использует силу тяжести (G), так что перфорационный инструмент 68 и устройство 70 считывания свободно падают через обсадную трубу 56. Свободное падение может быть через жидкость скважины внутри обсадной трубы 56 или через воздух внутри скважины 56. На фиг.6D транспортный механизм 66РА включает в себя парашют, который управляет скоростью опускания перфорационного инструмента 68 и устройства 70 считывания в скважину 56. Опять-таки парашют может работать в жидкости скважины или в воздухе, содержащемся в обсадной трубе 56.
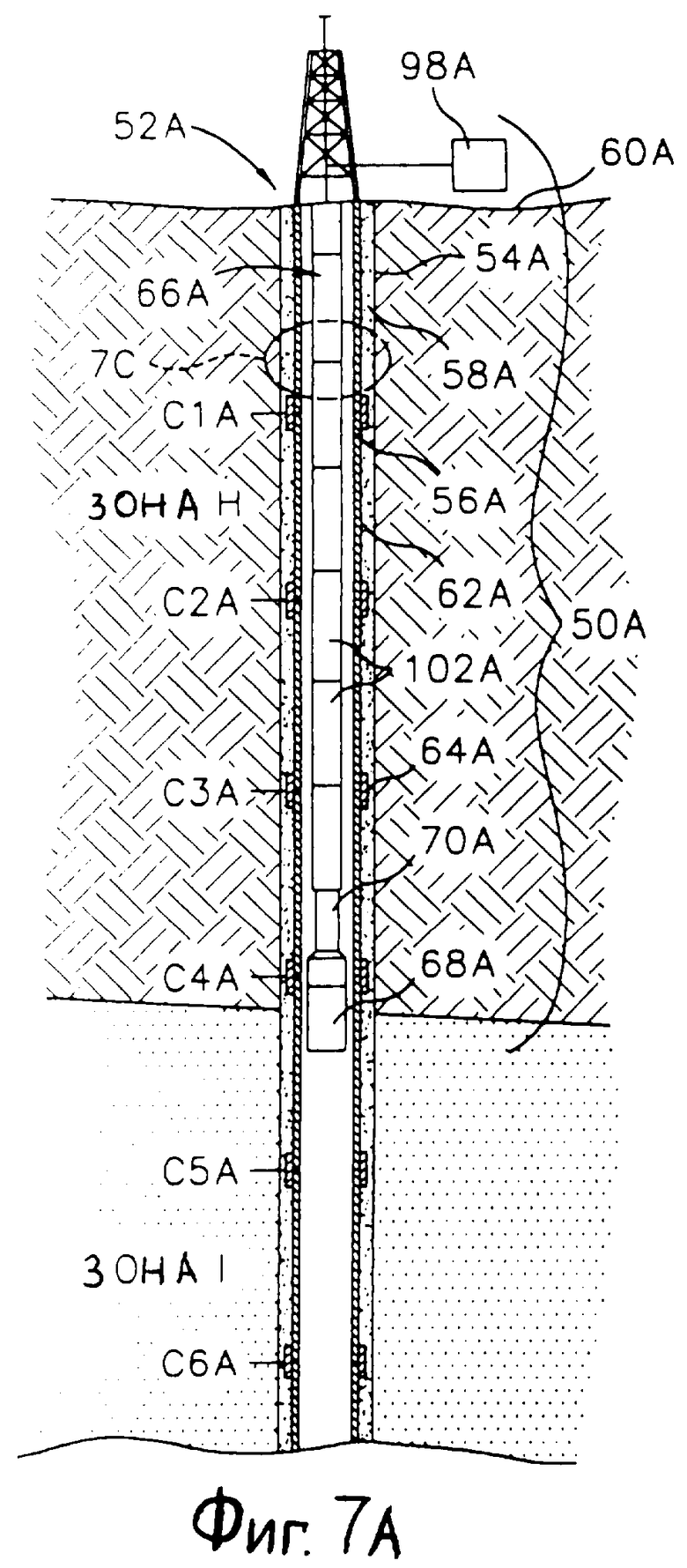
На фиг.7А-7С проиллюстрировано альтернативное выполнение системы 50А, сконструированной в соответствии с настоящим изобретением. Система 50А установлена в подземной скважине 52А, такой как нефте- и газодобывающая скважина. В этом выполнении система 50А выполнена с возможностью осуществлять процесс установки пакера в скважине 52А.
Скважина 52А включает в себя шахтный бур 54А и обсадную трубу 56А внутри шахтного бура 54А, окруженную бетоном 58А. Обсадная труба 56А содержит множество трубчатых элементов 62А, таких как металлические трубы, соединенные друг с другом манжетами 64А. Скважина 52А проходит от поверхности 60А земли через геологические формации внутри земли, которые представлены как Зоны Н и I.
Для выполнения процесса установки пакера система 50А включает в себя устройство 68А установки пакера, устройство 98А накачки для инструмента 68А установки пакера и устройство 70А считывания, находящееся в сигнальной связи с инструментом 68А установки пакера. В этом варианте выполнения устройство 98А накачки расположено на поверхности 60А, так что провод или другая среда передачи сигнала должна быть обеспечена между устройством 68 установки пакера и устройством 98А накачки. Инструмент 68А установки пакера может включать в себя надуваемый пакерный элемент, разработанный для накачки устройством 98А накачки и выполненный с возможностью герметичного сцепления с внутренним диаметром обсадной трубы 56А. На фиг.7В надуваемый пакерный элемент инструмента 68А установки пакера накачивается для герметизации внутреннего диаметра обсадной трубы 56А поблизости от Зоны I.
Система 50А также включает в себя множество идентификационных приборов 72 (фиг.3D), прикрепленных к манжетам 64А на обсадной трубе 56А и считываемых устройством 70А считывания. Кроме того, система 50А включает в себя транспортный механизм 66А для транспортировки устройства 68А установки пакера и устройства 70А считывания через обсадную трубу 56А скважины в Зону I. В этом выполнении транспортный механизм 66А содержит колонну труб, образованную трубчатыми элементами 102А. Как показано на фиг.7С, каждый трубчатый элемент 102А включает в себя охватываемую часть 94А соединения и охватывающую часть 96А соединения на противоположном конце. Это позволяет трубчатым элементам 102А скрепляться друг с другом для формирования транспортного механизма 66А. Кроме того, устройство 68А установки пакера может включать в себя центральную оправку в жидкостной связи с внутренним диаметром транспортного механизма 66А.
Устройство 70А считывания программируется передавать сигнал управления на устройство 72 накачки (фиг.3D). Например, в процессе установки пакера, показанном на фиг.7А и 7В, соединение С4А расположено рядом с верхним уровнем или точкой входа в Зону I. Поскольку желательно накачать накачиваемый пакерный элемент устройства 68А установки пакера, когда он находится поблизости от Зоны I, устройство 70А считывания может быть запрограммировано передавать сигнал управления на устройство 68А установки пакера, когда оно достигает соединения С4А. В этом выполнении разделительный элемент 88А отделяет устройство 68A установки пакера от устройства 70А считывания. Кроме того устройство 68А установки пакера расположено ниже внутри скважины относительно устройства 70А считывания.
Чтобы гарантировать, что последовательность установки пакера начата в правильное время, должны быть учтены дополнительные факторы, как было объяснено ранее. Эти факторы могут включать в себя скорость (V) устройства 68А установки пакера и устройства 70А считывания, время, необходимое для накачки накачиваемого пакерного элемента устройства 68А установки пакера. Альтернативно устройство 68А установки пакера может быть остановлено в конкретном соединении (например, соединении С5А) и затем накачано, как требуется. В этом случае устройство 70А считывания может быть запрограммировано передавать сигналы управления на дисплей 124 (фиг.4В) на поверхности 60А, когда устройство 68А установки пакера проходит соединение 64А на требуемой глубине. Оператор может управлять устройством 98А накачки, чтобы начать накачку устройства 98А установки пакера. Альтернативно последовательность накачки может начинаться автоматически схемой 120 управления инструментом (фиг.4А).
В каждом из описанных процессов способ по изобретению обеспечивает улучшенную скважину. Например, в процесс пробивания отверстий по фиг.3А и 3В в скважине 52 могут пробиваться отверстия в выбранной зоне или на выбранном участке выбранной зоны. Выработка из скважины 52 таким образом оптимизируется и скважина 52 способна вырабатывать больше жидких сред, в частности нефти и газа.
На фиг.8А-8С показана многоэтапная операция, выполняемая в соответствии со способом по изобретению. Первоначально, как показано на фиг.8А, обеспечен комбинированный инструмент 130. Этот комбинированный инструмент 130 включает в себя устройство 132 установки пакера и перфорационный инструмент 134, которые функционируют в основном, как описано ранее для устройства 68А установки пакера (фиг.7В), и перфорационного инструмента 68 (фиг.3А), описанного ранее. Кроме того комбинированный инструмент 130 включает в себя устройство 70 считывания, а обсадная труба 56 включает в себя идентификационные приборы 72 (фиг.3D), в основном сходные с описанными ранее. Как также показано на фиг.8А, комбинированный инструмент 130 транспортируется через обсадную трубу 56 с использованием гравитационного транспортного механизма 66G. Альтернативно может быть использован любой из описанных ранее транспортных механизмов.
Далее, как показано на фиг.8В, устройство 132 настройки пакера приводится в действие так, что накачиваемый пакерный элемент устройства 132 герметично закрывает обсадную трубу 56 на желательной глубине. В этом выполнении устройство 132 установки пакера является автономным блоком со встроенным источником накачки. Как и в случае описанных ранее вариантов выполнения, устройство 70 считывания обеспечивает сигналы управления для управления устройством 132 установки пакера и процесса установки пакера. Например, накачиваемый пакерный элемент устройства 132 установки пакера может накачиваться, когда устройство 70 считывания проходит выбранное соединение 64 и принимает ответный сигнал от идентификационного прибора 72, содержащегося внутри выбранного соединения 64. Как также показано на фиг.8В, перфорационный инструмент 134 отделяется от устройства 132 установки пакера и продолжает свободно падать через обсадную трубу 56.
Далее, как показано на фиг 8С, перфорационный инструмент 134 управляется так, что детонирующая и взрывная последовательности начинаются в основном так же, как описано ранее. Опять-таки устройство 70 считывания обеспечивает сигналы управления для управления перфорационным инструментом 134, чтобы начать детонирующую и взрывную последовательности на должной глубине. Как показано пунктирными стрелками на фиг.8С, взрыв зарядных установок 80 (фиг.3С) перфорационного инструмента 134 формирует отверстия в обсадной трубе 56 и бетоне 58.
Таким образом, изобретение обеспечивает способ и систему выполнения различных операций или процессов в скважинах и улучшения выработки скважин. Хотя изобретение описано со ссылкой на определенные предпочтительные варианты выполнения, как будет понятно для специалисту, определенные изменения и модификации могут быть выполнены без отхода от объема изобретения, как определено формулой изобретения.
Изобретения относятся к строительству и эксплуатации нефтегазовых скважин и могут быть использованы для выполнения действий в скважине, требующих привязки по глубине. Способ предусматривает расположение на манжете обсадной колонны на известной глубине идентификационного радиоприбора, который уникально идентифицируется, транспортировку через скважину вместе с устройством обработки устройства, позволяющего обнаружить радиоприбор, передачу радиоприбором ответных сигналов для его идентификации и управление инструментом обработки в ответ на обнаружение радиоприбора. В качестве идентификационной информации радиоприбора используют информацию о маркировке манжеты обсадной колонны и глубине. Операция может включать в себя процесс, выбранный из группы, состоящей из процессов пробивания отверстий, процессов установки пакера, процессов установки мостовых заглушек, процессов каротажа, процессов инспектирования, процессов химической обработки, процессов установки заплаток на обсадную трубу, процессов реактивного нарезания и процессов очистки. Система выполнения операции обработки в скважине включает множество идентификационных приборов, расположенных внутри скважины на разнесенных интервалах и известных глубинах, каждый из которых уникально идентифицируется, и соответствующее устройство считывания. Устройство считывания может быть прикреплено к инструменту обработки. Система может содержать транспортный механизм для перемещения устройства считывания и инструмента обработки через скважину. Устройство считывания может содержать приемник для приема ответных сигналов и передатчик для передачи сигналов передачи на идентификационные радиоприборы. Инструментами обработки могут являться перфорационный инструмент или инструмент установки пакера. С устройством считывания может быть связан компьютер, содержащий дисплей для подачи на него сигналов от устройства считывания. Изобретения направлены на повышение точности установки инструмента обработки в скважине. 2 н. и 8 з.п.ф-лы, 8 ил.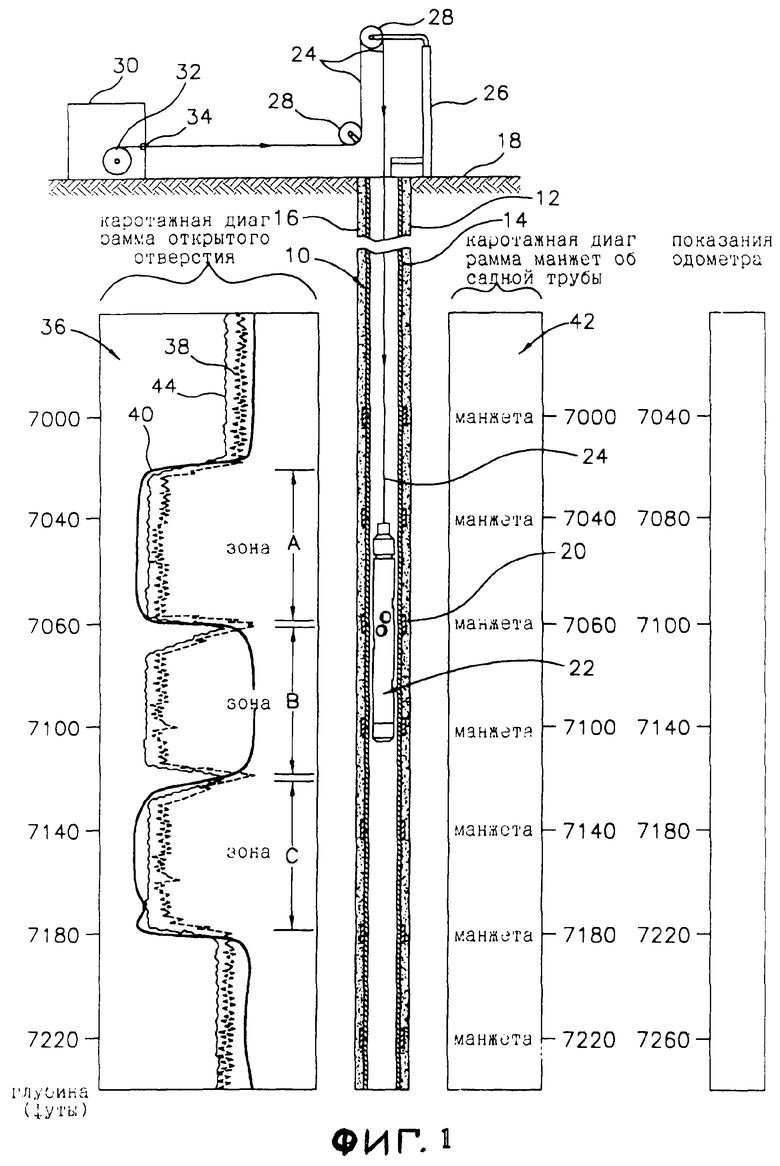
| US 6028534 A, 22.02.2000.ФРИДЛЯНДЕР Л.Я | |||
| Прострелочно-взрывная аппаратура и ее применение в скважинах | |||
| М.: Недра, 1985, с.176-178.SU 1562434 A1, 07.05.1990.SU 237077 А, 20.06.1969.RU 2055162 С1, 27.02.1996.SU 1214915 А1, 28.02.1986.RU 2050012 С1, 10.12.1995.US 6070662 A, 06.06.2000. |

