Изобретение относится к техническим средствам мониторинга и контроля состояния транспортных средств (ТС), предупреждения и действий в аварийных ситуациях.
В последние годы широкое применение в автомобильной электронике, особенно в электронных системах, устанавливаемых на дорогостоящие модели зарубежных автомобилей, получили различного рода локальные информационные сети и устройства, в том числе с возможностями выхода на внешние глобальные сети связи и передачи данных.
Так, в патенте US №6148253, G 06 F 7/00 описывается система управления для ТС, содержащая сервер, обслуживающий водителя и пассажира, находящихся на передних сидениях ТС, и сервер, обслуживающий пассажиров, находящихся на задних сидениях ТС. Серверы через модемы и мобильные телефоны имеют выход в телефонную сеть общего пользования и в Интернет. Это позволяет осуществлять дистанционную диагностику и настройку различных функциональных органов и узлов ТС с использованием внешних компьютерных терминалов и информационных центров. Наличие на борту ТС сервера, совместимого со стандартными программами браузеров для работы в сети Интернет, позволяет управлять настройками различных функциональных органов и узлов ТС с большого расстояния, например, с домашнего компьютера владельца ТС или уполномоченного им лица (пользователя) или с рабочего места установщика в сервисном центре с использованием стандартных программ.
Соединение с устройством, на котором установлена программа браузера, может быть обеспечено путем подключения к какой-либо из сетей связи и передачи данных, например к сотовой сети подвижной связи стандарта GSM.
Как правило, подобные системы (носящие специальное наименование - телематические) оснащены охранно-противоугонными средствами и средствами дистанционного управления функциональными органами ТС. Так, например, система по патенту RU №2173888, В 60 R 25/10 содержит штатные электронные модули, обеспечивающие определение состояния функциональных органов ТС и управление этими функциональными органами, контроллер локальной информационной сети ТС, подключенный к общей мультиплексной шине и к контроллеру-преобразователю протокола обмена данными, связанному с приемопередатчиком, например с абонентским терминалом сотовой сети подвижной связи, причем каждый из вышеупомянутых штатных электронных модулей подключен через интерфейс этого штатного электронного модуля к общей мультиплексной шине ТС, охранно-противоугонную подсистему, содержащую контроллер охранно-противоугонной подсистемы, электронные блоки охранно-противоугонной подсистемы, каждый из которых соединен через интерфейс этого электронного блока с общей мультиплексной шиной ТС, а также блок идентификации пользователя, состоящий из бесконтактно связанных друг с другом носимой части и возимой части, подключенной к контроллеру охранно-противоугонной подсистемы, при этом интерфейс каждого из электронных блоков охранно-противоугонной подсистемы выполнен с возможностью приема по общей мультиплексной шине данных о состоянии следующих функциональных узлов ТС: центрального замка, указателя поворотов, габаритных огней, ближнего света, стеклоподъемников, люка, кондиционера, зеркала заднего вида, рулевой колонки, кресел водителя и пассажиров ТС, а также штатного иммобилайзера и штатной охранной подсистемы ТС. Система содержит также WEB-сервер, связанный с возимой частью блока идентификации пользователя, с контроллером-преобразователем протокола обмена данными и с мультиплексной шиной ТС, а также модем локального соединения и обмена данными с внешними электронными устройствами, работающими в стандартном протоколе беспроводной связи, связанный с WEB-сервером, при этом контроллер-преобразователь протокола обмена данными выполнен с возможностью подключения к сети Интернет, а блок приема и передачи данных представляет собой либо абонентский терминал сети связи и передачи данных сухопутной подвижной радиослужбы, либо модем, выполненный с возможностью подключения к сети Интернет.
Недостатком описанной выше системы является неспособность осуществлять объективный контроль состояния агрегатов ТС. Наличие средств такого контроля на ТС, осуществляющих крупнотоннажные грузовые автоперевозки или перевозку людей, не только полезно, но в ряде случаев является обязательным условием получения лицензии на этот вид деятельности.
Появление в последние годы многочисленных индивидуальных предпринимателей на грузовых и пассажирских перевозках и ликвидация большого количества крупных автотранспортных предприятий усугубили эту проблему, практически упразднив ранее обязательные для всех автохозяйств процедуры контроля ведения путевого листа и учета времени труда водителей.
В результате возросло число дорожно-транспортных происшествий (ДТП) и ухудшились возможности их объективного расследования.
С целью устранения указанных недостатков ТС оборудуют прибором, именуемым (по аналогии с приборами, широко применяемыми в авиации) "черным ящиком". Этот прибор обеспечивает:
- непрерывный мониторинг состояния агрегатов ТС и водителя на маршруте;
- запись на борту ТС параметров, позволяющих, в случае ДТП, объективно установить его истинные причины и виновников;
- возможность оперативного анализа полученных данных в диспетчерских центрах различных служб и организаций (скорой медицинской службы, службы спасения, в страховых компаниях и других).
По мнению специалистов исследовательского центра итальянского концерна FIAT, координирующих один из таких проектов ("12 Вольт", 07 (74), 2005, с.6), "черный ящик" должен быть сделан из ударопрочного материала, содержать блок сбора и обработки данных, энергонезависимую память, датчик системы глобального позиционирования (GPS) и систему мобильной связи. В него должны поступать сигналы от панорамной видеокамеры, размещенной внутри ТС и способной поворачиваться на 360 градусов, а также от механических датчиков, установленных на передней, задней и боковых сторонах ТС (для регистрации столкновений), и от биомедицинских сенсоров, расположенных на теле пассажиров.
Это позволит вовремя передавать в службу спасения данные о месте аварии и о состоянии здоровья пассажиров ТС. Помимо собственно медицинской помощи, эта система полезна и для полиции, которая может установить виновника аварии, а также для страховых компаний, которые на основании этих данных могут определять размер страховых выплат и выявлять случаи фальсификаций.
Известен ряд систем, реализующих концепцию установки "черного ящика" на ТС. Так, ранее предложенная предприятием-заявителем телематическая система по патенту RU №2207262, В 60 R 25/00 содержит N штатных электронных модулей, М из которых связаны с функциональными органами ТС и обеспечивают определение состояния этих функциональных органов и управление ими, контроллер локальной информационной сети ТС, подключенный к общей мультиплексной шине и к контроллеру-преобразователю протокола обмена данными, связанному с блоком приема и передачи данных, например с абонентским терминалом сотовой сети подвижной связи, охранно-противоугонную подсистему, содержащую связанный с общей мультиплексной шиной контроллер охранно-противоугонный подсистемы, электронные блоки охранно-противоугонной подсистемы, каждый из которых связан с соответствующим функциональным органом ТС для обеспечения охраны и защиты от угона, и блок дистанционной идентификации пользователя ТС, состоящий из бесконтактно связанных между собой носимой части, например транспондерной карточки, и возимой части, подключенной к контроллеру охранно-противоугонной системы, в которой каждый из N штатных электронных модулей через интерфейс этого модуля и каждый из электронных блоков охранно-противоугонной подсистемы через интерфейс этого блока связаны с общей мультиплексной шиной. Система содержит, кроме того, последовательно соединенные блок считывания контрольных данных, вход которого подключен к общей мультиплексной шине, и блок сравнения, второй вход которого подключен к общей мультиплексной шине, а также блок регистрации контролируемых параметров отклонений от штатных режимов, первый и второй выходы которого соединены соответственно с дополнительным входом контроллера охранно-противоугонной подсистемы и с общей мультиплексной шиной, блок записи исходных данных о водителе и ТС, выполненный с возможностью записи и перезаписи цифровой информации о водителе и ТС в память носимой части блока дистанционной идентификации пользователя, например в цифровую память транспондерной карточки, при этом выход блока сравнения подключен к дополнительному входу контроллера-преобразователя протокола обмена данными и ко входу блока регистрации контролируемых параметров отклонений от штатных режимов и трансляции их по радиоэфиру с помощью блока приема и передачи данных, а возимая часть блока дистанционной идентификации пользователя выполнена с возможностью ввода в нее через контроллер охранно-противоугонной подсистемы контролируемых параметров отклонений от штатных режимов и записи их в память носимой части блока дистанционной идентификации пользователя, например в цифровую память транспондерной карточки. При этом один из (N-М) штатных электронных модулей может быть выполнен в виде приемника сигналов спутниковой радионавигационных систем НАВСТАР и/или ГЛОНАСС, а блок приема и передачи данных - в виде абонентского терминала сотовой сети подвижной связи стандарта GSM с возможностью приема и передачи коротких текстовых сообщений (SMS) и пакетной передачи данных по радиоканалу (GPRS). Обмен данными между внешней средой, например удаленными станциями, и контроллером локальной информационной сети ТС может осуществляться как по запросу со стороны удаленной станции (например, при дистанционном диагностировании состояния функциональных узлов ТС), так и по запросу со стороны контроллера локальной информационной сети ТС, например, при желании пользователя получить информацию о текущей транспортной ситуации или запросить справочную информацию об опорных точках маршрута.
Описанная выше система позволяет регистрировать различные нештатные ситуации, включая ДТП, для их последующего анализа. В том числе, могут фиксироваться попытки угона или кражи ТС, а также попытки фальсификации подобных событий владельцем ТС с целью получения страховых выплат. Указанные возможности обеспечиваются благодаря наличию в составе системы блока регистрации отклонений контролируемых параметров от заданных значений - прецизионного цифрового тахографа, фактически играющего роль "черного ящика". Например, может быть использован цифровой тахограф BR-6800 со считывающим устройством Fleet Manager System фирмы Baoruh (Тайвань).
Основным недостатком указанных приборов является их высокая (более 1500 долларов США) стоимость. Этот недостаток цифровых регистраторов ограничивает возможности их применения на ТС, особенно в небольших автотранспортных хозяйствах и в сфере индивидуального предпринимательства, всегда стремящихся свести к минимуму затраты на дополнительное оборудование.
Ниже предлагается альтернативное техническое решение, ориентированное на использование в аварийных ситуациях различной степени тяжести. В качестве прототипа изобретения выбрана система безопасности, навигации и мониторинга ТС по патенту RU №2175920, В 60 R 25/00, G 08 В 25/10, содержащая аппаратуру пользователя, включающую в себя навигационный приемник с антенной, работающий по сигналам спутниковых радионавигационных систем НАВСТАР и/или ГЛОНАСС, обеспечивающий геодезическую точность определения координат ТС, приемопередатчик с антенной, реализующий сотовую, транкинговую либо спутниковую радиосвязь с диспетчерским центром, выполненным с возможностями дифференциальной коррекции координат контролируемых ТС и отображения их местоположения и идентификационных параметров на электронной карте-схеме местности, бортовой компьютер, содержащий интерфейс, процессор, запоминающее устройство, аналого-цифровой преобразователь (АЦП) и два цифроаналоговых преобразователя, выходы которых подключены, соответственно, к входу аудиосистемы и к первому входу телемонитора, второй вход которого подключен к первому выходу телекамеры видеоконтроля, второй выход которой соединен через АЦП с соответствующим входом интерфейса, один из выходов которого связан с управляющим входом навигационного приемника, выход которого подключен к одному из входов интерфейса, а также набор охранных датчиков, в качестве которых используются датчики несанкционированного воздействия на ТС, датчики контроля параметров окружающей среды и технических параметров ТС, модем, реализующий, в зависимости от типа используемой радиосвязи, протоколы обмена данными сотовой, транкинговой либо спутниковой сетей связи, первый вход которого соединен с одним из выходов интерфейса, а первый выход - с входом трансивера, второй вход модема связан с соответствующим выходом интерфейса, а второй выход - со входом приемопередатчика, а также блок ручного ввода данных, выход которого связан с соответствующим входом интерфейса, один из выходов которого связан с процессором, а другой выход - с запоминающим устройством, при этом выходы процессора и запоминающего устройства подключены к соответствующим входам интерфейса. Аппаратура пользователя содержит, кроме того, абонентский приемник, входящий в состав пейджинговой сети связи общего пользования, транспондерную карточку, блок дистанционного считывания с антенной, выполненный с возможностью считывания идентификационного кода, зафиксированного в цифровой памяти транспондерной карточки, а также индикатор режима работы охранных датчиков, первый вход которого связан с первым выходом блока дистанционного считывания, и узел блокирования функциональных органов ТС, при этом входящий в состав бортового компьютера интерфейс выполнен с двумя дополнительными входами и с двумя дополнительными выходами, первый дополнительный выход интерфейса соединен с входом узла блокирования функциональных органов ТС, второй дополнительный выход интерфейса подключен к второму входу индикатора режима работы охранных датчиков, первый дополнительный вход интерфейса соединен со вторым выходом блока дистанционного считывания, а второй дополнительный вход - с выходом абонентского приемника, вход которого соединен по радиоэфиру с операторским блоком передачи данных, входящим в состав пейджинговой сети связи общего пользования.
Достоинством указанной системы является обеспечиваемая ей высокая эффективность противодействия несанкционированному воздействию на ТС, например угону или краже.
Недостатком же - отсутствие средств объективного контроля состояния ТС в момент ДТП. ДТП может быть относительно легким, не угрожающим жизни и здоровью водителя и пассажиров, а может иметь самые тяжелые последствия, например, в случае лобового столкновения ТС. В этом случае первоочередное значение приобретает оперативно переданная в органы быстрого реагирования (например, в скорую медицинскую помощь или в службу спасения) информация о месте ДТП и о степени его тяжести. Настоящее предложение направлено на устранение указанного выше недостатка системы-прототипа.
Предложение представляет собой группу изобретений, относящихся к двум объектам одинакового назначения, решающим одну и ту же задачу и обеспечивающим получение одного и того же технического результата (два варианта).
В первом варианте предметом изобретения является система контроля состояния ТС, содержащая диспетчерский центр и установленную на ТС аппаратуру пользователя, которая содержит центральный блок управления, связанный последовательно через первый блок согласования и модем с приемопередающим модулем подвижной связи, выполненным с возможностью сотовой, транкинговой либо спутниковой связи с диспетчерским центром, а также навигационный приемник, связанный с первым блоком согласования и выполненный с возможностью активации по командам, поступающим через первый блок согласования из центрального блока управления, приема сигналов спутниковых радионавигационных систем, вычисления текущих координат ТС и их передачи через первый блок согласования и модем в приемопередающий модуль подвижной связи, охранные датчики, выходы которых подключены к соответствующим входам центрального блока управления, и узлы блокирования функциональных органов, входы которых подключены к соответствующим выходам центрального блока управления, в систему введен двухуровневый датчик аварии, при этом модем выполнен с дополнительным входом, к которому подключен выход указанного двухуровневого датчика аварии, а навигационный приемник выполнен с возможностью активации при движении ТС.
Частным существенным признаком первого варианта изобретения является выполнение двухуровневого датчика аварии в виде блока акселерометров, два выхода которого, соответственно, через первый и второй АЦП подключены к первому и второму входам цифрового фильтра, выход которого через двухуровневое пороговое устройство соединен со входом формирователя коротких сообщений, выход которого является выходом указанного двухуровневого датчика аварии.
Во втором варианте предметом изобретения является система контроля состояния ТС, содержащая диспетчерский центр и установленную на ТС аппаратуру пользователя, которая содержит центральный блок управления, связанный последовательно через первый блок согласования и модем с приемопередающим модулем подвижной связи, выполненным с возможностью сотовой, транкинговой либо спутниковой связи с диспетчерским центром, а также навигационный приемник, связанный с первым блоком согласования и выполненный с возможностью активации по командам, поступающим через первый блок согласования из центрального блока управления, приема сигналов спутниковых радионавигационных систем, вычисления текущих координат ТС и их передачи через первый блок согласования и модем в приемопередающий модуль подвижной связи, охранные датчики, выходы которых подключены к соответствующим входам центрального блока управления, и узлы блокирования функциональных органов, входы которых подключены к соответствующим выходам центрального блока управления, в систему введен двухуровневый датчик аварии, при этом центральный блок управления выполнен с дополнительным входом, к которому подключен выход указанного двухуровневого датчика аварии.
Частным существенным признаком этого, второго варианта изобретения является выполнение двухуровневого датчика аварии в виде блока акселерометров, два выхода которого, соответственно, через первый и второй АЦП подключены к первому и второму входам цифрового фильтра, выход которого через двухуровневое пороговое устройство соединен со входом второго блока согласования, выход которого является выходом указанного двухуровневого датчика аварии.
Задачей настоящего изобретения является создание системы контроля состояния ТС, которая позволила бы повысить оперативность и надежность оповещения различных специализированных служб (скорой медицинской помощи, службы спасения, страховых компаний и других) о произошедшем ДТП и о степени его тяжести. Это, в свою очередь, позволит повысить эффективность реагирования указанных служб на ДТП.
Предлагаемая система выгодно отличается от известных аналогов, реализующих концепцию "черного ящика", своей дешевизной и удобством в эксплуатации.
Обеспечиваемый технический результат заключается в регистрации на борту ТС ударного воздействия на кузов, выявлении факта ДТП и степени его тяжести и передаче этой информации по сети связи в диспетчерский центр. При этом система умеет отличать кратковременные воздействия, не относящиеся к ДТП, от относительно длительных воздействий, являющихся результатом ДТП.
Суть изобретения поясняется на чертежах, представленных на фиг.1-4. В зависимости от состава базового бортового оборудования, могут быть использованы либо первый, либо второй варианты построения рассматриваемой системы контроля состояния ТС.
На фиг.1 приведена структурная схема первого варианта построения рассматриваемой системы контроля состояния ТС.
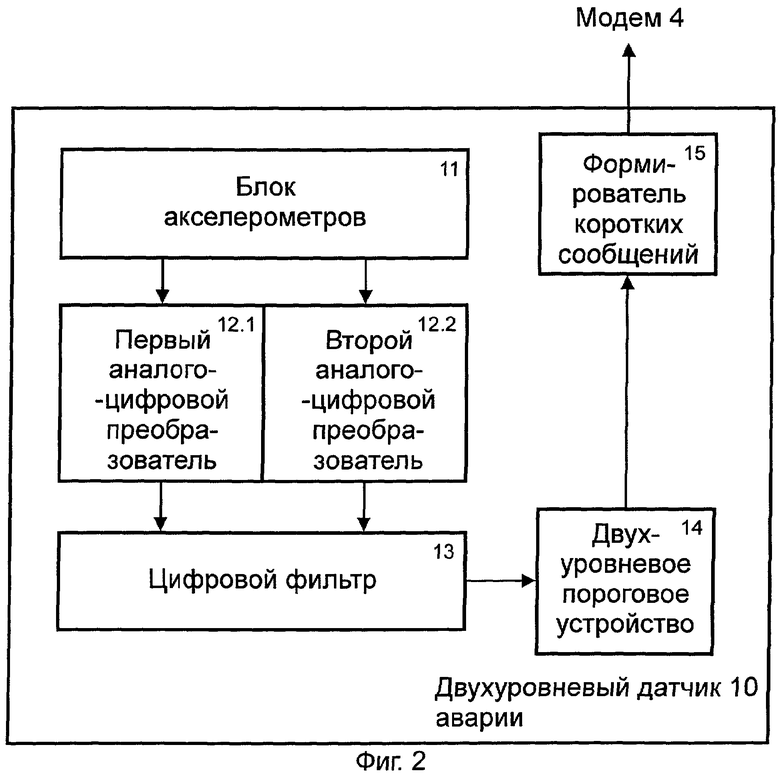
На фиг.2 показана структурная схема построения двухуровневого датчика аварии, используемого в первом варианте построения рассматриваемой системы.
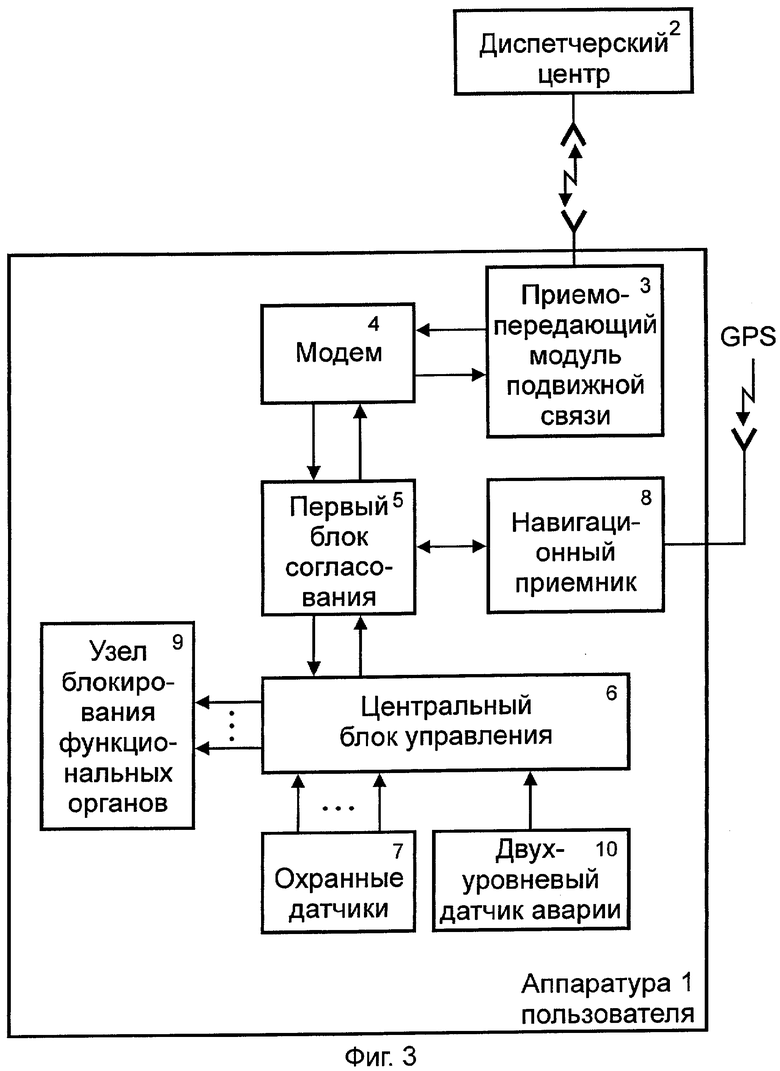
На фиг.3 представлена структурная схема второго варианта построения рассматриваемой системы контроля состояния ТС.
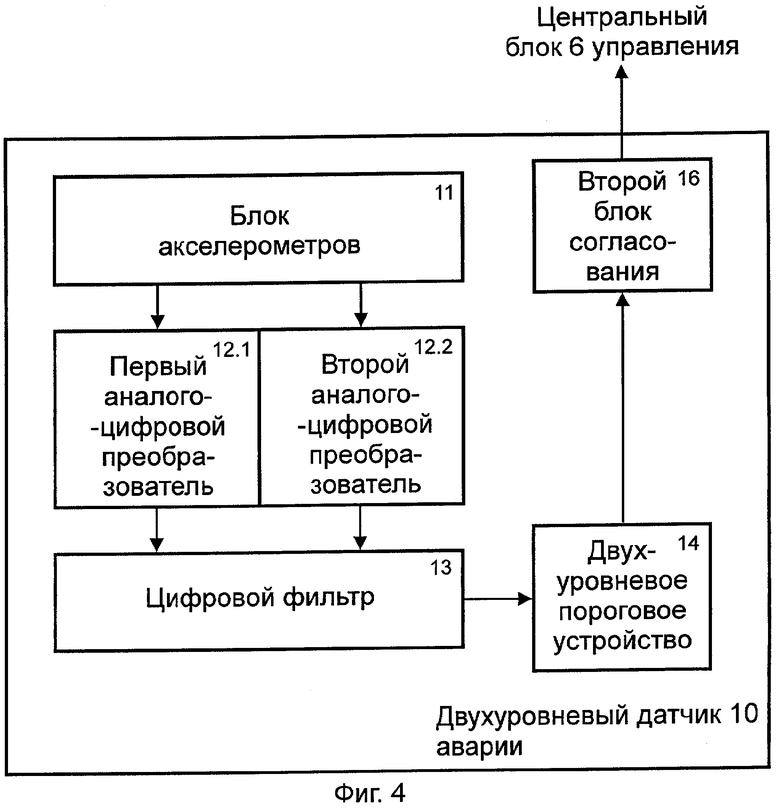
На фиг.4 показана структурная схема построения двухуровневого датчика аварии, используемого во втором варианте построения рассматриваемой системы.
На фиг.1-4 использованы следующие обозначения: 1 - аппаратура пользователя; 2 - диспетчерский центр; 3 - приемопередающий модуль подвижной связи; 4 - модем; 5 - первый блок согласования; 6 - центральный блок управления; 7 - охранные датчики; 8 - навигационный приемник; 9 - узлы блокирования функциональных органов; 10 - двухуровневый датчик аварии; 11 - блок акселерометров; 12.1 - первый АЦП; 12.2 - второй АЦП; 13 - цифровой фильтр; 14 - двухуровневое пороговое устройство; 15 - формирователь коротких сообщений; 16 - второй блок согласования.
Как в первом, так и во втором вариантах построения рассматриваемой системы контроля состояния ТС она содержит диспетчерский центр 2 и аппаратуру 1 пользователя, установленную на ТС. Аппаратура 1 пользователя содержит центральный блок 6 управления, связанный последовательно через первый блок 5 согласования и модем 4 с приемопередающим модулем 3 подвижной связи, выполненным, как и в системе-прототипе, с возможностью сотовой, транкинговой либо спутниковой связи с диспетчерским центром 2. В состав аппаратуры 1 пользователя входят, кроме того, навигационный приемник 8, связанный с первым блоком 5 согласования, охранные датчики 7, выходы которых подключены к соответствующим входам центрального блока 6 управления, узлы 9 блокирования функциональных органов, входы которых подключены к соответствующим выходам центрального блока 6 управления, и двухуровневый датчик 10 аварии.
В первом варианте построения рассматриваемой системы модем 4 выполнен с дополнительным входом, к которому подключен выход двухуровневого датчика 10 аварии. При этом двухуровневый датчик 10 аварии содержит (фиг.2) блок 11 акселерометров, два выхода которого, соответственно, через первый 12.1 и второй 12.2 АЦП подключены к первому и второму входам цифрового фильтра 13. Выход цифрового фильтра 13 через двухуровневое пороговое устройство 14 подключен к формирователю 15 коротких сообщений, выход которого является выходом вышеупомянутого двухуровневого датчика 10 аварии.
Во втором варианте построения рассматриваемой системы (фиг.3) центральный блок 6 управления выполнен с дополнительным входом, а модем 4, наоборот, без дополнительного входа. При этом, как и в первом варианте построения рассматриваемой системы, двухуровневый датчик 10 аварии содержит (фиг.4) блок 11 акселерометров, два выхода которого, соответственно, через первый 12.1 и второй 12.2 АЦП подключены к первому и второму входам цифрового фильтра 13, выход которого соединен со входом двухуровневого порогового устройства 14. Но вместо формирователя 15 коротких сообщений в состав двухуровневого датчика 10 аварии входит второй блок 16 согласования, обеспечивающий интерфейс двухуровневого датчика 10 аварии с центральным блоком 6 управления.
За исключением двухуровневого датчика 10 аварии, все показанные на фиг.1-4 элементы используются и в системе-прототипе (патент RU №2175920, В 60 R 25/00, G 08 В 25/10).
Так, основой диспетчерского центра 2 является установленный на рабочем месте оператора диспетчерского центра 2 высокопроизводительный компьютер, оснащенный системой отображения графической и семантической информации - так называемой географической информационной системой (ГИС). В качестве ГИС могут использоваться различные мультипрограммные системы, например известные коммерческие продукты Arcinfo, MapInfo. Для получения максимально высокой (геодезической) точности измерений в компьютере диспетчерского центра 2 может быть предусмотрена дифференциальная коррекция координат объектов. В этом случае в состав аппаратуры диспетчерского центра 2 вводится навигационный приемник сигналов глобальных спутниковых систем навигации НАВСТАР и/или ГЛОНАСС, аналогичный навигационному приемнику 8 аппаратуры 1 пользователя, а в программном обеспечении компьютера диспетчерского центра 2 используется соответствующая алгоритмическая процедура коррекции. Однако ни наличие режима дифференциальной коррекции, ни способ его конкретной реализации в диспетчерском центре 2 не являются существенными с точки зрения предмета настоящего изобретения и в данной заявке не детализируются.
Вид подвижной связи также несущественен для данного изобретения. Так, например, для передачи тревожных сообщений с ТС в диспетчерский центр 2 может быть использована специально формируемая на местности микросотовая сеть передачи данных. Такая сеть передачи данных описана в ранее полученном предприятием-заявителем патенте RU №2155684, В 60 R 25/00, G 08 В 25/10, G 08 G 1/123. В других вариантах для этой цели может быть использована сотовая сеть стандарта GSM, транкинговая или спутниковая системы связи. Вид используемой радиосети подвижной связи определяет лишь формат обмена данными, реализуемый в приемопередающем модуле 3 и в диспетчерском центре 2.
Двухуровневый датчик 10 аварии представлен в двух вариантах, соответствующих возможным вариантам построения базового бортового оборудования. Оба варианта двухуровневого датчика 10 аварии выпускаются предприятием-заявителем.
Двухуровневый датчик 10 аварии устанавливается в салоне ТС и жестко крепится к кузову (для исключения возможности смещения акселерометров при ударе). При установке двухуровневого датчика 10 аварии его настройка не требуется. Основные технические характеристики двухуровневого датчика 10 аварии (справедливые для каждого из двух возможных вариантов его построения, серийно выпускаемых предприятием-заявителем) приведены ниже.
не менее 1 с
Таким образом, все используемые в системе элементы известны и доступны на коммерческом рынке. Поэтому возможность практической реализации рассматриваемой системы не вызывает сомнений.
Рассматриваемая система контроля состояния ТС работает следующим образом.
Установленная на борту ТС аппаратура 1 пользователя предназначена для обмена данными с диспетчерским центром 2. Указанный обмен данными осуществляется по одной или по нескольким сетям подвижной связи, например по сотовой сети стандарта GSM. Кодированный сигнал, посылаемый диспетчерским центром 2, принимается антенной приемопередающего модуля 3 подвижной связи, который переносит его на более низкую частоту и подает на вход модема 4. Модем 4 осуществляет демодуляцию принятого сигнала, выделяет содержащееся в нем кодовое сообщение, например SMS-сообщение, и передает его через первый блок 5 согласования на один из входов центрального блока 6 управления.
Рассматриваемая система выполняет как охранно-противоугонную функцию, так и функцию оповещения о ДТП. Рассмотрим вначале реализации системой ее охранно-противоугонной функции.
При постановке ТС на охрану абонент системы (пользователь ТС) сообщает в диспетчерский центр 2, например, со своего личного телефона адресный код приемопередающего модуля 3 подвижной связи установленной на борту ТС аппаратуры 1 пользователя и блокирующий код, который может быть применен в случае угона охраняемого ТС. Оператор диспетчерского центра 2 записывает эти данные в память своего компьютера. Таким образом, оператор диспетчерского центра 2 может, в случае необходимости, дистанционно заблокировать движение ТС.
Как было отмечено выше, диспетчерский центр 2 оснащен системой отображения графической и семантической информации - ГИС. ГИС позволяет отобразить местоположение ТС на фоне карты-схемы местности в виде условного знака совместно с сопровождающей текстовой информацией, характеризующей идентификационные признаки и состояние данного ТС.
Несанкционированное воздействие на охраняемое ТС вызывает срабатывание каких-либо охранных датчиков 7 и передачу соответствующих извещений в центральный блок 6 управления. Далее, по команде из центрального блока 6 управления, в первый блок 5 согласования поступает сигнал активации навигационного приемника 8. Первый блок 5 согласования преобразует этот сигнал в форму команды включения навигационного приемника 8. По получению указанной команды навигационный приемник 8 начинает вырабатывать сообщения, несущие информацию о местоположении ТС, которые последовательно через первый блок 5 согласования и модем 4 поступают в приемопередающий модуль 3 подвижной связи и излучаются в эфир. При этом первый блок 5 согласования преобразует формат указанных сообщений в формат стандартного сигнала, например, SMS-сообщения. Модем 4 осуществляет модуляцию этого сигнала. Затем в приемопередающем модуле 3 сигнал переносится на несущую, используемую в сети подвижной связи. Указанный сигнал по сети подвижной связи поступает в диспетчерский центр 2. В диспетчерском центре 2 осуществляются стандартные операции по приему, обработке сигнала и оперативному отображению содержащихся в нем данных. Эти данные дополняются сведениями об абоненте системы, который является владельцем охраняемого ТС. Эти сведения хранятся в компьютере диспетчерского центра 2 с момента заключения договора на обслуживание с данным абонентом системы.
В результате после приема сигнала оператор диспетчерского центра 2 может наблюдать и анализировать одновременно данные о местоположении охраняемого ТС, данные о направлении и скорости его перемещения по улично-дорожной сети, сведения о владельце охраняемого ТС (например, данные его технического паспорта) и другие важные для принятия оперативных решений данные. Оператор диспетчерского центра 2 может сообщить по телефону о случившемся владельцу ТС и, получив от последнего подтверждение, что действительно произошел угон (а не ложное срабатывание какого-либо охранного датчика 7), может дистанционно заблокировать движение ТС.
Эта операция осуществляется путем посылки сигнала, несущего блокирующий код, из диспетчерского центра 2 в аппаратуру 1 пользователя. Данный сигнал принимается приемопередающим модулем 3, демодулируется модемом 4 и преобразуется первым блоком 5 согласования в стандартный формат извещения, принятый в центральном блоке 6 управления. Это извещение, содержащее блокирующий код, направляется в процессор центрального блока 6 управления, где указанный блокирующий код сравнивается с ранее зафиксированным в запоминающем устройстве центрального блока 6 управления внутренним блокирующим кодом. При совпадении этих кодов процессор центрального блока 6 управления формирует команду на блокирование функциональных органов ТС, например двигателя. Эта команда поступает в соответствующие узлы 9 блокирования функциональных органов охраняемого ТС. Например, в качестве узлов 9 блокирования функциональных органов могут выступать блок управления иммобилайзером или реле типа HOOK-UP.
Описанные выше операции, осуществляемые в случае несанкционированного воздействия на охраняемое ТС (угона, кражи), не отличаются от аналогичных операций, осуществляемых системой-прототипом.
Принципиальные отличия касаются операций, осуществляемых в случае аварии, например ДТП.
В этом случае основным источником тревожной (аварийной) информации является датчик 10 аварии, который имеет два уровня реагирования на ДТП: предупредительный и тревожный.
Предупредительный уровень срабатывает при относительно легких столкновениях ТС с препятствием, а тревожный - при сильных ударах, которые могут быть опасны для жизни водителя и пассажиров ТС, например, при лобовом столкновении.
Чувствительным элементом двухуровневого датчика 10 аварии является блок 11 акселерометров. Он включает в себя два акселерометра, установленных на одной плате перпендикулярно друг другу. Для реагирования на лобовое столкновение или на удар в заднюю часть ТС используется акселерометр, ориентированный по продольной оси ТС. Для регистрации боковых ударов используется акселерометр, установленный перпендикулярно продольной оси ТС. Плата с акселерометрами жестко закреплена на кузове ТС для того, чтобы исключить возможность смещения акселерометров при ударе относительно кузова ТС.
Сигналы с выхода каждого из акселерометров, входящих в состав блока 11 акселерометров, подвергаются аналого-цифровому преобразованию, соответственно, в первом 12.1 и втором 12.2 АЦП и фильтруется цифровым фильтром 13. Цифровой фильтр 13 позволяет улучшить отношение сигнал/шум, а также отделить относительно длительные (более 1 мс) ударные воздействия, являющиеся результатом ДТП, от кратковременных воздействий, которые могут быть и не связаны с ДТП (например, от случайного удара по кузову каким-либо предметом).
С выхода цифрового фильтра 13 код, характеризующий амплитуду сигнала с выхода соответствующего акселерометра, которая прямо пропорциональна величине перегрузки, возникшей вдоль оси чувствительности акселерометра, подается на двухуровневое пороговое устройство 14. Задачей этого устройства является формирование кодовой посылки, свидетельствующей о степени тяжести ДТП. При ударе, приводящем к превышению первого порога (16 g), формируется код предупреждения. При сильном ударе с перегрузкой, превышающей 32 g, опасной для жизни водителя и пассажиров, формируется код тревоги. Величины указанных порогов могут варьироваться, в зависимости от конструкции ТС и его органов обеспечения безопасности.
В первом варианте исполнения рассматриваемой системы сигнал, характеризующий степень тяжести ДТП, с выхода двухуровневого порогового устройства 14 подается на вход формирователя 15 коротких сообщений. Сообщение может быть либо голосовым, либо текстовым (например, SMS), что не принципиально для настоящего изобретения. В данном случае формирователь 15 коротких сообщений играет такую же роль, как первый блок 5 согласования в случае передачи тревожных сообщений о несанкционированном воздействии на ТС. Сообщение, содержащее данные о степени тяжести ДТП, поступает на дополнительный вход модема 4, аналогичный входу, служащему для приема сообщений из первого блока 5 согласования.
Кроме того, из первого блока 5 согласования поступает навигационная информация, получаемая навигационным приемником 8, который при движении ТС постоянно находится во включенном состоянии (например, навигационный приемник 8 может включаться при включении зажигания ТС). В модеме 4 формируется единое информационное сообщение, содержащее данные о текущем местоположении ТС и о степени тяжести ДТП. Модем 4 преобразует указанное информационное сообщение в модулирующее воздействие, которое прикладывается ко входу приемопередающего модуля 3 подвижной связи. Приемопередающий модуль 3 подвижной связи переносит указанное сообщение на высокочастотную несущую и излучает в эфир.
Сообщение, содержащее данные о степени тяжести ДТП, принимается диспетчерским центром 2. Обработка и отображение указанного сообщения осуществляются в нем таким же образом, как и в случае приема тревожных сообщений о несанкционированном воздействии на ТС. В результате оператор диспетчерского центра 2 может наблюдать и анализировать одновременно данные о местоположении ТС, потерпевшего аварию, сведения о его владельце, данные его технического паспорта, а также наиболее важные для принятия оперативных решений данные о степени тяжести ДТП. Оператор диспетчерского центра 2 может оперативно оповестить о случившемся соответствующие службы, например дорожно-постовую службу ГИБДД, скорую медицинскую помощь, а также других зарегистрированных пользователей ТС. В некоторых случаях, например в случаях лобового столкновения ТС, такое оповещение может сыграть решающую роль для спасения участников ДТП.
Во втором возможном варианте исполнения предлагаемой системы (фиг.3) двухуровневый датчик 10 аварии подключается не к модему 4, а к дополнительному входу центрального блока 6 управления. В этом случае модем 4 выполняется без дополнительного входа и работает в штатном для себя режиме, а центральный блок 6 управления выполнен с дополнительным входом.
Так же, как в рассмотренном выше первом варианте построения системы, при ДТП в двухуровневом датчике 10 аварии (фиг.4) срабатывает хотя бы один из акселерометров, входящий в состав блока 11 акселерометров. Сигналы с выходов акселерометров, входящих в состав блока 11 акселерометров, подвергаются аналого-цифровому преобразованию в первом 12.1 и втором 12.2 АЦП и фильтруются цифровым фильтром 13. С выхода цифрового фильтра 13 код, характеризующий амплитуду сигнала с выхода соответствующего акселерометра, которая прямо пропорциональна величине перегрузки, возникшей вдоль оси чувствительности акселерометра, подается на двухуровневое пороговое устройство 14, которое формирует кодовую посылку, свидетельствующую о степени тяжести ДТП.
Для преобразования формата сигнала, поступающего с выхода двухуровневого порогового устройства 14, в формат, необходимый для восприятия центральным блоком 6 управления, в состав двухуровневого датчика 10 аварии введен второй блок 16 согласования.
Второй блок 16 согласования преобразует сообщение, содержащее данные о степени тяжести ДТП, в формат, аналогичный формату извещений, поступающих в центральный блок 6 управления от охранных датчиков 7. Несмотря на устанавливаемый аналогичный формат, извещение о степени тяжести ДТП отличается от извещений охранных датчиков 7 тем, что оно не связано с установлением режима охраны ТС.
Сообщение, содержащее данные о степени тяжести ДТП, поступает на дополнительный вход центрального блока 6 управления, аналогичный входам, служащим для приема извещений от охранных датчиков 7. Центральный блок 6 управления преобразует указанное сообщение таким же способом, как и извещение, получаемое от любого из охранных датчиков 7, и посылает его на вход первого блока 5 согласования. В частности, вне зависимости от того, находится ли ТС в движении, по команде из центрального блока 6 управления в первый блок 5 согласования поступает сигнал активации навигационного приемника 8. Навигационный приемник 8 дополняет сообщение о степени тяжести ДТП данными о местонахождении ТС. Первый блок 5 согласования преобразует формат сообщения о степени тяжести ДТП, дополненного сведениями о местонахождении ТС, в формат стандартного сообщения (например, SMS-сообщения) и передает указанное сообщение на вход модема 4. Модем 4 преобразует указанное сообщение в соответствующее модулирующее воздействие, которое прикладывается ко входу приемопередающего модуля 3 подвижной связи. Приемопередающий модуль 3 подвижной связи переносит указанное сообщение на высокочастотную несущую и излучает в эфир.
Сообщение, содержащее данные о степени тяжести ДТП, принимается диспетчерским центром 2, где обрабатывается и отображается полностью аналогично рассмотренному выше первому варианту построения системы.
Единственное отличие сообщений, поступающих в диспетчерский центр 2 во втором варианте построения системы, состоит в том, что сведения о местонахождении ТС сопровождают сообщение, содержащее данные о степени тяжести ДТП, в любом случае, а не только при движении ТС. То есть, учитывается возможность, при которой со стоящим на стоянке рассматриваемым ТС сталкивается какое-то другое ТС.
Таким образом, в любом из вариантов построения системы может быть обеспечен относительно дешевый и удобный в эксплуатации контроль состояния ТС. Предлагаемая система позволяет повысить оперативность и надежность оповещения о ДТП и о степени его тяжести различных специализированных служб (например, скорой медицинской помощи, службы спасения, страховых компаний). Это, в свою очередь, позволяет повысить эффективность реагирования указанных служб на ДТП.
Обеспечиваемый технический результат заключается в обеспечении возможности регистрации на борту ТС ударного воздействия на кузов, характерного для ДТП, выявлении факта и степени тяжести ДТП и в передаче этой информации по сети подвижной связи в диспетчерский центр 2 с возможностью быстрого реагирования на случившееся ДТП.
Предлагаемой системой целесообразно оснащать в первую очередь специальный транспорт, водители которого довольно часто вынуждены прибегать к приемам экстремального вождения. Особенно это касается водителей машин скорой медицинской помощи, а также водителей милицейских и спасательных ТС. Указанная система полезна и для частных ТС, особенно если ими пользуются малоопытные водители, на долю которых выпадает большая часть ДТП. Система интересна и коммерческим организациям, занимающимся сдачей ТС в прокат. При наличии на борту ТС такой системы недобросовестному водителю не удастся утаить факт ДТП, даже если он успел перед возвратом ТС сделать "косметический" ремонт. Изобретение представляет интерес и для страховых компаний. Известно, что после ДТП многие пользователи ТС пребывают в стрессовом состоянии и забывают оповестить представителей страховой компании. В то же время, порой, только аварийный комиссар в состоянии проследить за правильной фиксацией всех обстоятельств ДТП, исключить возможные факты мошенничества, оказать помощь пользователю ТС в правильном оформлении первичных документов и защитить его от психологического давления со стороны других участников ДТП.
При этом следует отметить, что предлагаемая система сохраняет все преимущества, связанные с многофункциональностью и с высокой точностью определения координат ТС, присущие системе-прототипу, и имеет существенно меньшую стоимость, чем любая из систем, реализующих концепцию "черного ящика".
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ОПОВЕЩЕНИЯ | 2006 |
|
RU2298494C1 |
| СИСТЕМА МНОГОСТОРОННЕГО КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2264936C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕДОЗВОЛЕННОГО ИСПОЛЬЗОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2291071C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕДОЗВОЛЕННОГО ИСПОЛЬЗОВАНИЯ ИЛИ КРАЖИ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2357880C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДОСТУПОМ В ТРАНСПОРТНЫЕ СРЕДСТВА | 2007 |
|
RU2323838C1 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2329164C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| ОХРАННО-ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2309063C1 |
Группа изобретений относится к техническим средствам мониторинга и контроля состояния транспортных средств (ТС), предупреждения и действий в аварийных ситуациях. Имеется диспетчерский центр. На ТС установлена аппаратура пользователя. Она содержит центральный блок управления, связанный последовательно через первый блок согласования и модем с приемопередающим модулем подвижной связи, выполненным с возможностью сотовой, транкинговой либо спутниковой связи с диспетчерским центром. Кроме того, в аппаратуру пользователя входят навигационный приемник, охранные датчики и узлы блокирования функциональных органов ТС. Навигационный приемник связан с первым блоком согласования с возможностью активации по командам из центрального блока управления и передачи координат ТС в приемопередающий модуль. Выходы охранных датчиков подключены к соответствующим входам центрального блока управления. Входы узлов блокирования функциональных органов ТС подключены к соответствующим выходам центрального блока управления. Отличие системы от известных заключается в том, что в нее введен двухуровневый датчик аварии, который в одном варианте подключен к дополнительному входу модема, а в другом варианте - к дополнительному входу центрального блока управления. Группа изобретений позволяет повысить оперативность и надежность оповещения различных специализированных служб (скорую медицинскую помощь, службу спасения, страховые компании и др.) о дорожно-транспортных происшествиях и степени их тяжести. 2 н. и 2 з.п. ф-лы, 4 ил.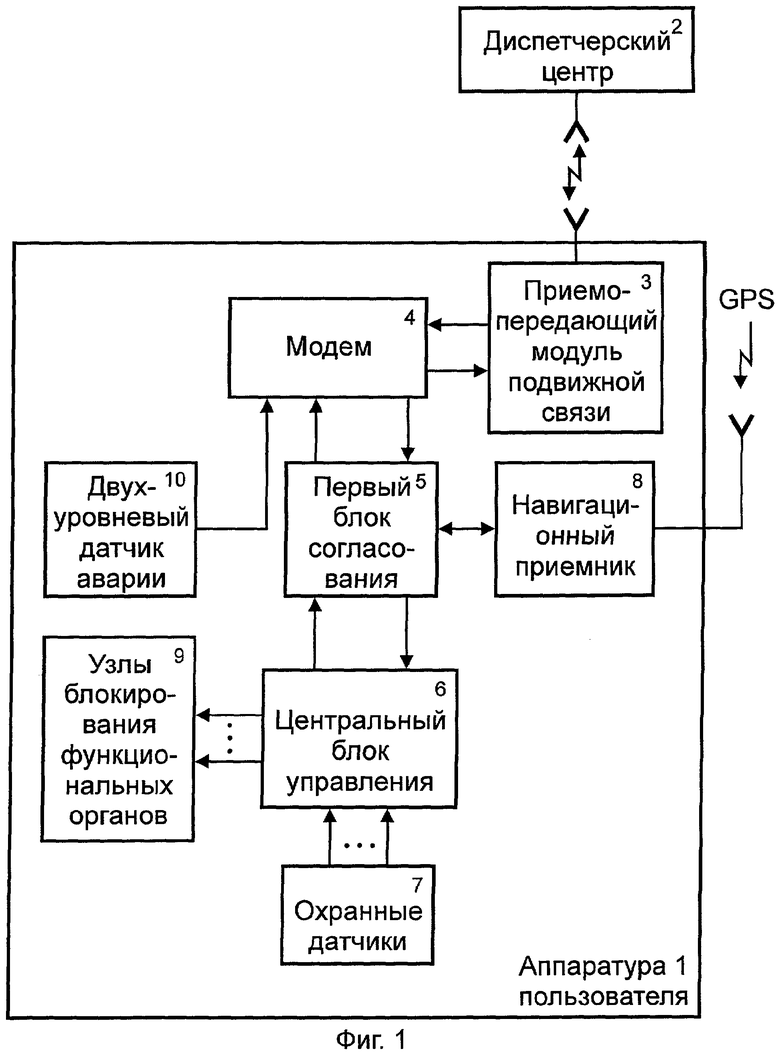
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА | 2000 |
|
RU2173888C1 |
| US 6148253 С1, 14.11.2000. | |||

