Изобретение относится к области информационно-управляющих систем и может быть использовано для построения автоматизированных систем управления (АСУ), реализующих функции управления и контроля мобильных (в том числе высокодинамичных объектов не зависимо от метеорологических условий и времени суток.
Известна система радиолокационного обеспечения (РЛО), связи и передачи данных, входящая в АСУ Военно-воздушных сил (ВВС) «Эталон» /3/, которая предназначена для решения задач информационного обеспечения частей и подразделений ВВС, взаимного обмена информацией с другими потребителями, включая органы управления воздушным движением (ВД) гражданской авиацией, в интересах обеспечения управления летательными аппаратами (ЛА) на всех этапах полета от взлета до посадки и контроля воздушного пространства в зоне ответственности.
В ее состав входят: источники первичной радиолокационной информации (РЛИ): радиолокационные станции (РЛС), подвижные радиолокационные высотомеры (ПРВ), авиационные комплексы радиолокационного дозора и наведения (АК РЛДН); источники вторичной РЛИ: радиолокационные посты малой и большой производительности (РЛП МП и РЛП БП), центры обработки РЛИ (ЦОРИ), которые предназначены для сбора и обработки информации о воздушной обстановке, а также обеспечения этой информацией соответствующих пунктов управления (ПУ). Система РЛО, связи и передачи данных строится по территориально-иерархическому признаку, при этом источники первичной и вторичной РЛИ позиционируются таким образом, чтобы создать наиболее экономичным способом всевысотное, многодиапазонное и динамичное радиолокационное поле в требуемом диапазоне дальностей выдачи информации. Автоматизация процессов сбора, обработки и выдачи информации обеспечивается высокопроизводительными комплексами средств автоматизации.
Основные недостатки подсистемы РЛО, связи и передачи данных АСУ ВВС «Эталон» состоят в том, что, во-первых, создание сплошного радиолокационного поля (РЛП) обнаружения и наведения ограничено дальностью действия средств радиолокации и радиосвязи, жесткими требованиями к позиционированию РЛС и высокой зависимостью от углов закрытия. Во-вторых, в указанной подсистеме отсутствует взаимный автоматизированный обмен информацией о воздушной обстановке, что значительно снижает оперативность и точность контроля подвижных объектов.
Наиболее близкой по технической сущности к заявляемому изобретению является система контроля ADS-B (система автоматического зависимого радиовещательного наблюдения) /2/, содержащая космическую навигационную систему «НАВСТАР», имеющую навигационные космические аппараты среднеорбитального эшелона, бортовой компонент, содержащий бортовую аппаратуру, в состав которой входит навигационный комплекс и терминал связи, наземные и морские (в том числе мобильные) пункты контроля и радиолинии связи между ними.
Система контроля ADS-B функционирует следующим образом: объекты контроля (в данном случае - летательные аппараты) осуществляют полеты по установленным маршрутам. Навигационный комплекс (НК), входящий в состав бортовой аппаратуры (БА), осуществляет высокоточное определение своего местоположения, используя космическую навигационную систему «НАВСТАР», терминал связи (ТС) формализует полученную от НК информацию и передает ее в радиовещательном режиме как на БА ближайших ЛА (с целью осуществления межсамолетной навигации), так и на пункты контроля, находящиеся в зоне прямой радиовидимости.
Основные недостатки ADS-B: система контроля реализует свои возможности только в пределах прямой радиовидимости; отсутствует возможность контроля подвижных объектов (ЛА) над недоступными для оборудования ПК континентальными и океанскими районами; низкая оперативность доставки формализованной навигационной информации о подвижных объектах до потребителя из-за отсутствия единого информационного поля.
Требуемый технический результат - обеспечение глобальности действия и непрерывности информационного поля, достижение тесного и устойчивого сопряжения с бортовыми и наземными системами, обеспечение оперативности доставки формализованной навигационной информации о подвижных объектах до потребителя с вероятностью не ниже 0.99.
Указанный технический результат достигается тем, что предлагаемая система контроля, содержащая космическую навигационную систему среднеорбитального эшелона, бортовую аппаратуру, включающую в себя навигационный комплекс, терминал связи, размещенные на контролируемых объектах, пункты контроля подвижных объектов наземного и морского базирования дополнительно включает низкоорбитальный эшелон космических аппаратов связи и ретрансляции, совокупность датчиков-корректоров систем местоопределения, интегрированных в бортовую аппаратуру контролируемых объектов.
Сущность изобретения поясняется на фиг.1-3.
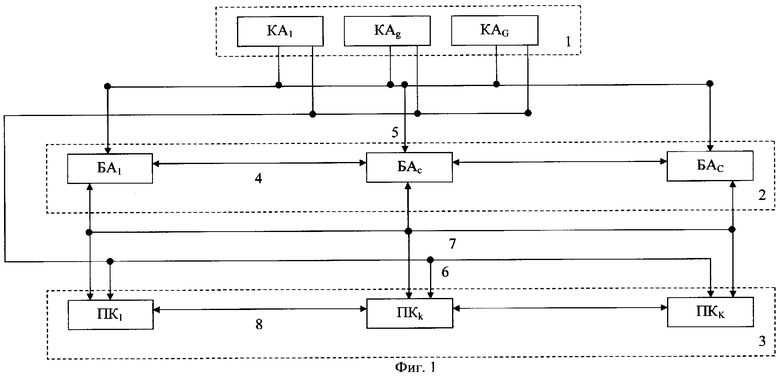
На фиг.1 показана структура системы контроля ADS-B, которая включает: навигационные космические аппараты (КА) среднеорбитального эшелона 1, бортовой компонент 2, содержащий бортовую аппаратуру (БА), наземные и морские (в том числе мобильные) пункты контроля (ПК) 3 и радиолинии связи между ними 4, 5, 6, 7, 8. Индексами g, c, k на фиг.1 обозначены текущие номера элементов системы контроля ADS-B, a индексами G, С, К - общее количество этих элементов.
На фиг.2 показана структура космической автоматизированной системы контроля за подвижными объектами, которая включает: космическую навигационную систему среднеорбитального эшелона 1, состоящую из G космических аппаратов навигации (КАН); низкоорбитальный эшелон космических аппаратов связи и ретрансляции 2, состоящий из R космических аппаратов связи и ретрансляции (КАС); бортовую аппаратуру (БА) 3, размещенную на контролируемых объектах, число которых обозначено индексом I. В состав бортовой аппаратуры каждого контролируемого объекта интегрированы N датчиков-корректоров систем местоопределения; пункты контроля подвижных объектов (ПК) наземного и морского базирования 4, число которых обозначено индексом К; цифрами 1, 2, 3, 4, стоящими возле стрелок, пронумерованы информационные входы/выходы между всеми элементами космической автоматизированной системы контроля за подвижными объектами; цифрами 5...12 обозначены каналы обмена информацией между всеми элементами космической автоматизированной системы контроля за подвижными объектами; индексами g, i, n, k, r обозначены текущие номера элементов автоматизированной системы контроля за подвижными объектами. На фиг.2 - первые выходы бортовой аппаратуры g-ных КА навигации среднеорбитального эшелона (g=1, G) соединены радиолиниями 5 с первыми входами бортовой аппаратуры r-ных КА связи и ретрансляции низкоорбитального эшелона (r=1, R), вторые выходы бортовой аппаратуры g-ных КА навигации среднеорбитального эшелона соединены радиолиниями 6 с первыми входами i-й бортовой аппаратуры контролируемых объектов (i=1, I), третьи выходы бортовой аппаратуры g-ных КА навигации среднеорбитального эшелона соединены радиолиниями 11 с первыми входами аппаратуры k-ных наземных и морских пунктов контроля подвижных объектов (k=1, K). Вторые входы/выходы бортовой аппаратуры r-ных КА связи и ретрансляции низкоорбитального эшелона соединены радиолиниями 7 со вторыми входами/выходами i-й бортовой аппаратуры контролируемых подвижных объектов, третьи входы/выходы r-ных КА связи и ретрансляции соединены радиолиниями 10 с первыми входами/выходами k-й аппаратуры пунктов контроля. Третьи входы/выходы i-й бортовой аппаратуры, которые одновременно являются третьими входами/выходами навигационного комплекса бортовой аппаратуры контролируемых подвижных объектов, соединены радиолиниями с третьими входами/выходами k-й аппаратуры пунктов контроля, четвертые входы/выходы i-й бортовой аппаратуры контролируемых объектов, соединены между собой радиолиниями передачи данных, четвертые входы/выходы k-й аппаратуры пунктов контроля подвижных объектов соединены между собой проводными каналами передачи данных
На фиг.3 показана структура бортовой аппаратуры, размещенной на i-ных контролируемых объектах космической автоматизированной системы контроля за подвижными объектами, которая включает: терминал связи (ТС); навигационный комплекс (НК); N датчиков-корректоров, цифрами 1, 2, 3, 4, стоящими возле стрелок, пронумерованы информационные входы/выходы между всеми элементами бортовой аппаратуры и внешними элементами космической автоматизированной системы контроля за подвижными объектами. На фиг.3 первый вход навигационного комплекса соответствует первому входу i-й бортовой аппаратуры (i=1, I), показанному на фиг.2, первые выходы n-ных датчиков-корректоров бортовой аппаратуры (n=1, N) соединены проводными каналами со вторыми входами навигационного комплекса, третий вход/выход навигационного комплекса соединен проводным каналом с первым входом/выходом терминала связи, второй, третий, четвертый вход/выход терминала связи соответствует второму, третьему, четвертому входу/выходу i-й бортовой аппаратуры (i=1, I), показанным на фиг.2.
Навигационные КА среднеорбитального эшелона 1 предназначены для создания на земной поверхности, в воздушном и околоземном космическом пространстве навигационного координатно-временного поля с заданными характеристиками, обеспечивающими возможность решения различных навигационно-временных задач потребителями навигационной информации, таких как определение координат местоположения потребителя, а также определения составляющих по осям х, у, z вектора скорости его движения в глобальном масштабе. Среднеорбитальный эшелон навигационных КА 1 представляет собой кинематически правильную трехплоскостную систему по 8 навигационных КА в каждой из наклонных плоскостей. Орбиты - близкие к круговым, средняя их высота над поверхностью Земли около 20000 км, а драконический период обращения 11...12 час. Для создания более благоприятных условий потребителям, находящимся в высоких широтах и приполярных областях, наклонение орбит составляет 61...65 град. Плоскости орбит разнесены по долготе восходящего узла на 120 град. друг относительно друга и наклонены к плоскости экватора на 60...65°. Фазовый сдвиг по аргументу широты навигационных КА в одной плоскости равен 45°. Фазовый сдвиг по аргументу широты навигационных КА, лежащих в разных плоскостях равен 15°. Орбиты с указанными параметрами относятся к классу резонансных (они совершают 16...18 полных оборотов вокруг Земли за 8...9 звездных суток). Последнее позволит все КА в системе сфазировать таким образом, что на интервале фазового цикла они имеют практически один след на поверхности Земли, чем будет обеспечиваться исключительно высокая баллистическая устойчивость системы.
При этом обеспечивается наблюдение в любой точке земной поверхности, воздушного и околоземного космического пространства одновременно не менее 5-ти навигационных КА среднеорбитального эшелона. Аппаратура навигационных КА среднеорбитального эшелона позволяет поддерживать высокую точность бортовой шкалы времени за счет использования специальных стандартов частоты со стабильностью порядка 10-13...10-14, записывать данные для формирования навигационного сообщения, корректировать бортовую шкалу времени по командам с Земли, формировать навигационные сообщения и излучать их в направлении потребителей навигационной информации. Навигационное сообщение каждого навигационного КА среднеорбитального эшелона 1 содержит информацию о точных отсчетах времени системы и точных координатах навигационного КА в эти моменты времени, что позволяет создать пространственное навигационно-временное поле с заданными характеристиками в глобальном масштабе.
Космические аппараты-ретрансляторы низкоорбитального эшелона 2 предназначены для передачи (ретрансляции) на пункты контроля в едином формате системы формализованного навигационного сообщения. Они поддерживают непрерывность единого информационного поля системы, доступность каналов передачи данных, требуемую оперативность и достоверность сообщений.
Низкоорбитальный эшелон КА связи и ретрансляции 2 представляет собой многоплоскостную систему из 30...42 малогабаритных КА (МКА). При этом МКА могут размещаться в шести орбитальных плоскостях по 5...7 МКА в каждой. Плоскости орбит равномерно разнесены по долготе восходящего узла. Угол между соседними орбитальными плоскостями может составлять 60°. Фазовый сдвиг по аргументу широты КА-ретрансляторов, лежащих в соседних орбитальных плоскостях, может составлять 9...12°. Все орбиты круговые с высотой порядка 500...700 км и наклонены к плоскости экватора на 65...75°. При этом может быть обеспечен однократный глобальный обзор любой точки земной поверхности. Все космические аппараты-ретрансляторы содержат многоканальную приемопередающую аппаратуру непрерывной связи с прямой ретрансляцией с различными характеристиками.
При этом вероятность немедленного обслуживания заявок контролируемых объектов может быть определена по формуле:


где α - приведенная интенсивность входящего потока информации;
n - среднее число занятых каналов;
k3 - коэффициент загрузки каналов.
Среднее число заявок, находящихся в очереди, может быть определено по формуле:
Среднее время ожидания заявки в очереди может быть определено по формуле:

Наземные и морские пункты контроля подвижных объектов могут создаваться по территориально-иерархическому принципу и объединяться между собой наземными локальными и региональными проводными каналами передачи данных.
Наземные (морские) пункты контроля подвижных объектов 4 предназначены для приема формализованной навигационной информации с объектов контроля непосредственно и через КА связи и ретрансляции 2, ее обработки и реализации функций контроля и управления. Основой для создания системы пунктов контроля являются сети передачи данных, включающие специализированные центры приема обработки и распределения потоков информации между различными локальными подсистемами и использующие наземные проводные каналы магистральных и местных линий связи. Создание специализированных сетей и использование существующих позволит в полной мере использовать современные средства обработки информации. Каждый ПК одновременно поддерживает связь с несколькими КА-ретрансляции, обеспечивая интерфейс сети обмена данными. В функции центрального ПК входит управление базой данных о состоянии сети, контроль и распределение сетевых ресурсов. Состав и характеристики технических средств автоматизации, входящих в ПК, выбираются исходя из предельно возможной интенсивности движения объектов контроля и возможности комплексирования информации.
Линии связи 5, 6, 11 между КА навигации среднеорбитального эшелона 1, КА связи и ретрансляции низкоорбитального эшелона 2, бортовой аппаратурой 3 и наземными (морскими) пунктами контроля 4 представляют собой широкополосные радиолинии с частотным разделением каналов, работающие в двухчастотном диапазоне электромагнитных волн (1...1.5 и 1.5...2 МГц) и предназначены для передачи навигационных сигналов высокой точности.
Линии связи 7, 9, 10 между КА связи и ретрансляции низкоорбитального эшелона 2, бортовой аппаратурой 3, наземными (морскими) пунктами контроля 4 предназначены для передачи командно-программной и формализованной навигационной информации о состоянии (местоположении) подвижных объектов контроля и представляют собой радиолинии, работающие в сантиметровом диапазоне электромагнитных волн.
Линии связи 8 между i-й бортовой аппаратурой (i=1, I) предназначены для передачи командно-программной и формализованной навигационной информации о состоянии (местоположении) подвижных объектов контроля для реализации управления групповыми действиями, межсамолетной навигации и представляют собой радиолинии, работающие в сантиметровом диапазоне электромагнитных волн.
Линии связи 12 между аппаратурой k-ных наземных и морских пунктов контроля (k=1, К), предназначенные для передачи командно-программной и формализованной навигационной информации о состоянии (местоположении) подвижных объектов контроля для реализации функций управления и контроля, представляют собой наземные локальные и региональные проводные каналы передачи данных.
Космическая автоматизированная система контроля функционирует следующим образом.
Космические навигационные аппараты среднеорбитального эшелона 1, функционирование и взаимосвязь которых описана в /1, 4/, осуществляют выдачу навигационных сообщений низкоорбитальному эшелону КА связи и ретрансляции 2, бортовой аппаратуре (объектам контроля) 3, наземным (морским) пунктам контроля 4, обеспечивая синхронизацию всех процессов в автоматизированной системе, высокоточную координаметрию объектов контроля.
Малогабаритные космические аппараты связи и ретрансляции низкоорбитального эшелона 2 обеспечивают создание единого информационного поля, путем глобальной передачи данных со средним временем доставки информации около 4 минут с вероятностью 0,99 по межспутниковым каналам. При нахождении бортовой аппаратуры объекта контроля 3 в зоне прямой радиовидимости от ПК наземного компонента 4 реализуется функция передачи данных без ретрансляции, непосредственно на ПК с вероятностью 0,99.
Бортовая аппаратура 3 осуществляет прием навигационных сигналов на совокупность n-ных датчиков-корректоров; при ухудшении достоверности информации от навигационных КА среднеорбитального эшелона 1, навигационный комплекс осуществляет комплексную обработку информации, поступающую от n-ных ДК на основе развитых алгоритмов обработки. Терминал связи реализует функцию создания и передачи в едином формате системы формализованного сообщения и передает его по радиолинии 8 соседним объектам контроля для осуществления межсамолетной навигации, по радиолинии 9 - пунктам контроля, находящимся в зоне прямой радиовидимости, по радиолиниям 10 - МКА низкоорбитального эшелона связи для ретрансляции данных заинтересованному ПК.
Совокупность ПК 4, выстроенных по территориально-иерархическому принципу и объединенных наземными локальными и региональными проводными сетями передачи данных, оборудованных автоматизированными техническими средствами, обеспечивает по радиолиниям 9, 10 прием данных о состоянии (местоположении) подвижных объектов, их обработку, передачу по проводным линиям 12 заинтересованным потребителям (организациям, ведомствам), решает задачи контроля, управления движением (в том числе, обеспечение безопасности).
Источники информации
1. Болдин В.А., Зубинский В.И., "Глобальная спутниковая навигационная система ГЛОНАСС." - М.: ИПРЖР, 1998. - 400 с., ил.
2. Нахмедов Э. "ADS-B. Аспекты переходного периода.//Новости аэронавигации." - 2001 - № 4 - с. 7-13.
3. Основы применения АСУ ВВС. Учебное пособие. - Монино: ВВА, 1985. - 87 с.
4. "Сетевые спутниковые радионавигационные системы" В.С. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др.(под ред. П.П. Дмитриева и В.С. Шебшаевича). - М.: Радио и связь, 1982 - 272 с. ил.
5. Соколов В.В., Филимонов Е.Б., Пыльцов В.А., "Низкоорбитальные спутниковые системы связи для передачи дискретных сообщений с допустимым временем задержки"//Электромагнитные волны и электронные системы. - 1996 - № 1 - с. 56-63.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| МНОГОЦЕЛЕВАЯ КОСМИЧЕСКАЯ СИСТЕМА | 2008 |
|
RU2360848C1 |
| Способ управления полетом низкоорбитального космического аппарата через навигационные космические аппараты системы ГЛОНАСС с применением резервного канала передачи с кодовым разделением командно-программной информации | 2022 |
|
RU2800530C1 |
| СПОСОБ ПОСТРОЕНИЯ НИЗКООРБИТАЛЬНОЙ СПУТНИКОВОЙ СЕТЕВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2299837C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| Система управления полетом космического аппарата с применением в качестве ретрансляторов низкоорбитальных спутников, связанных между собой межспутниковыми линиями связи | 2019 |
|
RU2713293C1 |
| Космическая система спутниковой связи | 2017 |
|
RU2734228C2 |
| Способ создания глобальной информационной среды в околоземном пространстве и многофункциональная космическая информационная система "Парадигма" на базе сети низкоорбитальных космических аппаратов для его осуществления | 2018 |
|
RU2707415C2 |
| ГЛОБАЛЬНАЯ ИНТЕГРИРОВАННАЯ СПУТНИКОВАЯ НАВИГАЦИОННО-КОМАНДНО-ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 2005 |
|
RU2304843C2 |
| Система управления абонентским трафиком через наземные и спутниковые каналы связи | 2016 |
|
RU2627224C1 |

Космическая автоматизированная система контроля за подвижными объектами относится к области информационно-управляющих систем. Технический результат - обеспечение глобальности действия и непрерывности информационного поля, достижение тесного и устойчивого сопряжения с бортовыми и наземными системами, обеспечение оперативности доставки формализованной навигационной информации в подвижных объектах до потребителя с вероятностью, не ниже 0,99. Для этого система контроля содержит космическую навигационную систему среднеорбитального эшелона, бортовую аппаратуру, включающую в себя навигационный комплекс, терминал связи, размещенные на контролируемых объектах, пункты контроля наземного и морского базирования, низкоорбитальный эшелон космических аппаратов связи и ретрансляции, совокупность датчиков-корректоров систем местоопределения, интегрированных в бортовую аппаратуру контролируемых объектов. 3 ил.
Космическая автоматизированная система контроля за подвижными объектами, содержащая космическую навигационную систему среднеорбитального эшелона, бортовую аппаратуру, включающую в себя навигационный комплекс, терминал связи, размещенные на контролируемых подвижных объектах, пункты контроля подвижных объектов наземного и морского базирования, отличающаяся тем, что дополнительно включает низкоорбитальный эшелон космических аппаратов (КА) связи и ретрансляции, совокупность датчиков-корректоров систем местоопределения, интегрированных в бортовую аппаратуру контролируемых объектов, причем первые выходы бортовой аппаратуры g-х КА навигации среднеорбитального эшелона (g=1, G) соединены радиолиниями с первыми входами бортовой аппаратуры r-х КА связи и ретрансляции низкоорбитального эшелона (r=1, R), вторые выходы бортовой аппаратуры g-х КА навигации среднеорбитального эшелона соединены радиолиниями с первыми входами i-й бортовой аппаратуры контролируемых объектов (i=1, I), которые одновременно являются первыми входами/выходами навигационного комплекса бортовой аппаратуры контролируемых подвижных объектов, третьи выходы бортовой аппаратуры g-х КА навигации среднеорбитального эшелона соединены радиолиниями с первыми входами аппаратуры k-х наземных и морских пунктов контроля подвижных объектов (k=1, К), вторые входы/выходы бортовой аппаратуры r-х КА связи и ретрансляции низкоорбитального эшелона соединены радиолиниями со вторыми входами/выходами i-й бортовой аппаратуры контролируемых подвижных объектов, которые одновременно являются вторыми входами/выходами навигационного комплекса бортовой аппаратуры контролируемых подвижных объектов, третьи входы/выходы r-х КА связи и ретрансляции соединены радиолиниями с первыми входами/выходами k-й аппаратуры пунктов контроля, третьи входы/выходы i-й бортовой аппаратуры, которые одновременно являются третьими входами/выходами навигационного комплекса бортовой аппаратуры контролируемых подвижных объектов, соединены радиолиниями с третьими входами/выходами k-й аппаратуры пунктов контроля, четвертые входы/выходы i-й бортовой аппаратуры контролируемых объектов, которые одновременно являются четвертыми входами/выходами навигационного комплекса бортовой аппаратуры контролируемых подвижных объектов, соединены между собой радиолиниями передачи данных, четвертые входы/выходы k-й аппаратуры пунктов контроля подвижных объектов соединены между собой проводными каналами передачи данных, кроме того, в бортовой аппаратуре контролируемых подвижных объектов первые выходы n-х датчиков-корректоров (n=1, N) соединены проводными каналами со вторыми входами навигационного комплекса, третий вход/выход навигационного комплекса соединен проводным каналом с первым входом/выходом терминала связи.
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ | 1992 |
|
RU2037962C1 |
| JP 10147300 А, 02.06.1998 | |||
| JP 9329662 А, 27.12.1997 | |||
| JP 2000207700 A, 02.06.1998. | |||

