Настоящее изобретение относится к способу и устройство управления оптическими ловушками. Более конкретно, изобретение относится к способам и устройствам для динамического управления матрицами оптических ловушек, а также для управляемого заполнения матриц оптических ловушек частицами. Такие способы и устройства позволяют осуществлять динамическое изменение местоположения оптической ловушки, прочности и размера каждой оптической ловушки, а также позволяют осуществлять управляемую адаптацию и обратную связь для использования оптических ловушек для исследовательских и промышленных целей.
Известно из уровня техники построение оптических "пинцетов", использующих оптические градиентные силы одного пучка света для управления местоположением маленькой диэлектрической частицы, погруженной в текучую среду, показатель преломления которой меньше, чем таковой у частицы. Техника оптических пинцетов была обобщена, чтобы позволить также проведение манипуляций с отражающими и поглощающими частицами, а также с частицами с низкой диэлектрической проницаемостью.
Таким образом, традиционные системы могут управлять единичными частицами, используя один пучок света для создания одной оптической ловушки. Для управления множественными частицами должны использоваться множественные пучки света. Трудности создания протяженных ловушек с множественными пучками, используя традиционный способ оптического пинцета, запрещают их использование во многих потенциальных коммерческих применениях, таких как изготовление и манипуляция нанокомпозитными материалами, включая электронные, фотонные и оптоэлектронные устройства, матрицы химических датчиков для использования в химических и биологических анализах, в матрицах голографического и компьютерного хранения данных.
Таким образом, задача настоящего изобретения заключается в обеспечении усовершенствованного способа и системы для создания множества оптических ловушек.
Еще одна задача изобретения заключается в обеспечении нового способа и устройства для управления оптическими ловушками и матрицами маленьких частиц.
Другая задача изобретения заключается в обеспечении усовершенствованного способа и устройства для динамического управления оптическими ловушками.
Дополнительная задача изобретения заключается в обеспечении нового способа и устройства для последовательного формирования оптических ловушек и/или матриц частиц.
Дополнительная задача изобретения заключается в обеспечении усовершенствованного способа и устройства для осуществления динамического управления размерами, формой и прочностью оптических ловушек.
Еще одна дополнительная задача изобретения заключается в обеспечении нового способа и устройства для компьютерного формирования голографической конфигурации для динамического управления конфигурациями оптических ловушек.
Также, другая задача изобретения заключается в обеспечении усовершенствованного способа и устройства для использования пространственного светового модулятора к лазерному пучку для динамического управления матрицами оптических ловушек.
Также, дополнительная задача изобретения заключается в обеспечении нового способа и устройства, использующего механическое устройство для селективного пропускания лазерных пучков для варьируемого во времени формирования специфических матриц оптических ловушек.
Также, дополнительная задача изобретения заключается в обеспечении усовершенствованного способа и устройства для увеличенного потока частиц в оптических ловушках и селективный вывод различных частиц для оптического захвата в ловушку.
Также, дополнительная задача изобретения заключается в обеспечении нового способа и устройства для наблюдения и манипулирования за биологической средой, используя управляемую матрицу оптических ловушек.
Другая задача изобретения заключается в обеспечении нового способа и устройства для использования одиночного пучка света с дифракционной оптикой для формирования конфигурации световых пучков для создания множества оптических ловушек.
Дополнительная задача изобретения заключается в обеспечении нового способа и устройства для использования голограмм для генерации оптического градиентного поля для управления множеством частиц или другими оптическими средами.
Другая задача изобретения заключается в обеспечении усовершенствованного способа и систему для создания множества оптических ловушек для разнообразных коммерческих применений, относящихся к манипуляциям маленькими частицами, такими как производство оптических схем, применениям нанокомпозитных материалов, изготовление электронных компонент, оптоэлектронных устройств, матрицами химических и биологических датчиков, сборок матриц голографического хранения данных, помощь в приложениях комбинаторной химии, содействие коллоидной самоагрегации, а также манипуляции биологическими материалами.
Еще, другая задача изобретения заключается в обеспечении способа и системы для построения конфигурации варьирующихся во времени и пространстве оптических градиентных полей для коммерческих применений.
Также, задача изобретения заключается в обеспечении нового способа и системы для использования одного или нескольких лазерных пучков в сочетании с одним или более дифракционными оптическими элементами, для построения селективно варьируемой по времени и/или специфической пространственной матрицы оптических ловушек для управления диэлектрическим материалом.
Дополнительная задача изобретения заключается в обеспечении усовершенствованного способа и системы, используя один входной лазерный пучок, дифракционный оптический элемент, а также рассеивающую и/или собирающую линзу для формирования статической или динамической оптической ловушки.
Также, дополнительная задача изобретения заключается в обеспечении нового способа и системы для построения матрицы оптических ловушек, которая непосредственно может наблюдаться пользователем.
Еще также, другая задача изобретения заключается в обеспечении усовершенствованного способа и системы, использующих ввод лазерного пучка в дифракционный оптический элемент с системой сканирования луча, дающей возможность сканирования матрицы оптических ловушек для различных коммерческих применений.
В дополнение, другая задача изобретения заключается в обеспечении нового способа и устройства для построения конфигурации оптической ловушки, используя лазерный пучок, дифракционный оптический элемент, а также рассеивающую и/или собирающую оптическую систему для формирования конфигурации ловушки в селектируемом местоположении по отношению к фокальной плоскости линзы объектива.
Также, другая задача изобретения заключается в обеспечении усовершенствованного способа и устройство для использования лазерного пучка и расположенного наклонно дифракционного оптического элемента для отфильтрования непродифрагированного пучка для эффективного использования только дифрагированного оптического пучка в конфигурации месторасположения оптической ловушки.
Также, другая задача изобретения заключается в обеспечении нового способа и устройства для использования ввода лазерного пучка на дифракционный оптический элемент, для осуществления, по меньшей мере, двумерного расположения оптических ловушек вне фокальной плоскости объектива.
Также еще, другая задача изобретения заключается в обеспечении усовершенствованного способа и системы для использования светового пучка и дифракционной оптики в сочетании с множеством линз телескопа для сканирования матрицы оптических ловушек.
Еще, дополнительная задача изобретения заключается в обеспечении нового способа и системы, формирующей матрицу оптических ловушек, используя одиночный ввод светового пучка на дифракционный оптический элемент и оптическую систему, для управляемого сканирования матрицы оптических ловушек, так что к динамически смещаемым оптическим ловушкам прикладываются колебательные осцилляции небольшой амплитуды.
Другая задача изобретения заключается в обеспечении нового способа для создания множественных независимо управляемых оптических ловушек, используя в качестве дифракционного оптического элемента адресуемую в зависимости от времени фазосдвигающую среду (типа жидкокристаллической фазосдвигающей матрицы).
Дальнейшая задача изобретения заключается в обеспечении нового способа для создания зависящих от времени оптических градиентных полей для сегрегации микроскопических частиц.
Еще другая задача изобретения заключается в обеспечении нового способа для манипулирования множеством биологических объектов, включая кристаллизацию белков.
Другие задачи, особенности и преимущества настоящего изобретения станут очевидными из последующего описания предпочтительных вариантов реализации изобретения, взятых в сочетании с сопровождающими чертежами, описанными ниже, в которых по всему описанию схожие элементы имеют одинаковые номера позиций.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его реализации со ссылками на сопровождающие чертежи, на которых:
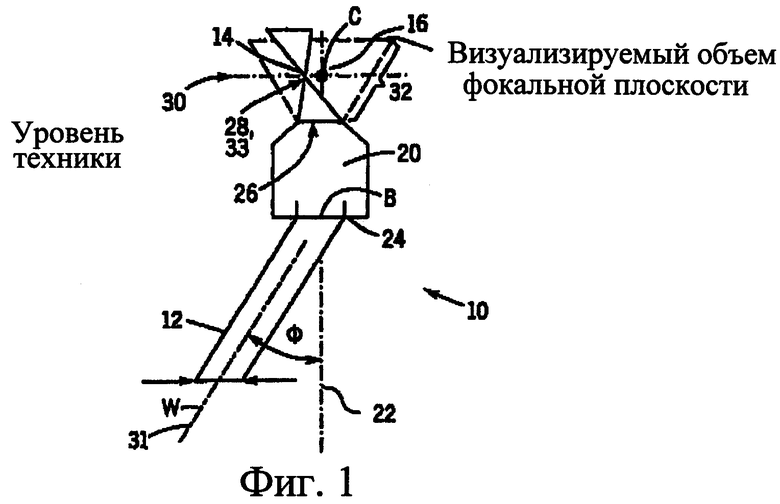
На фиг.1 представлена схема, иллюстрирующая способ и систему, известную из уровня техники для одного оптического пинцета.
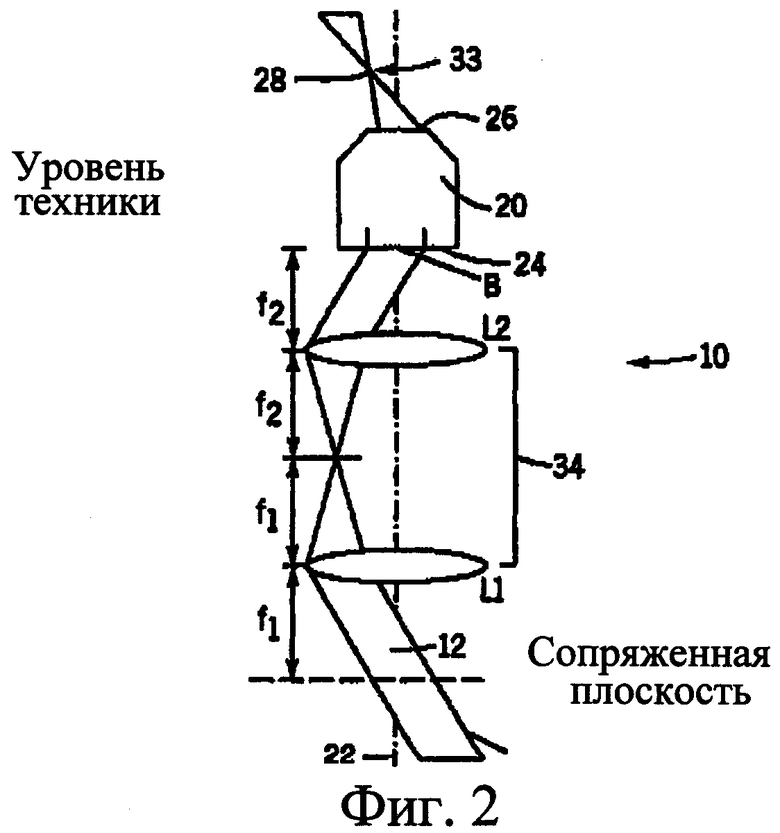
На фиг.2 представлена схема, иллюстрирующая способ и систему, известную из уровня техники для одного управляемого оптического пинцета.
На фиг.3 представлена схема, иллюстрирующая способ и систему, использующую дифракционный оптический элемент.
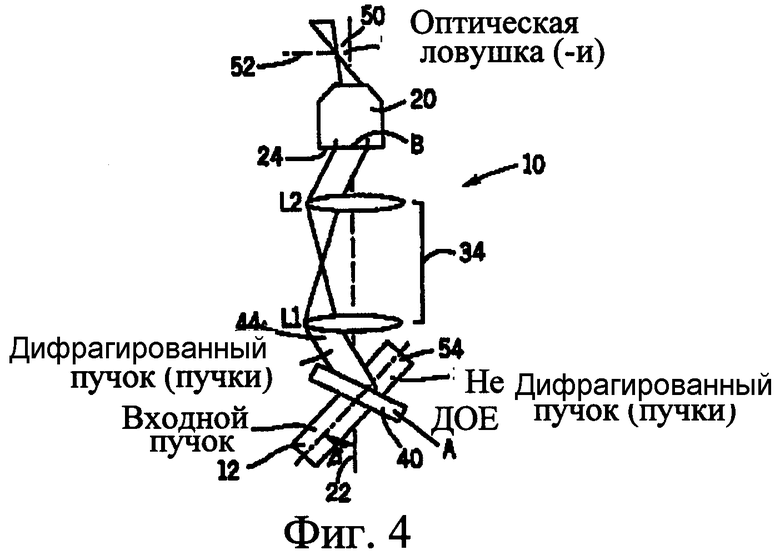
На фиг.4 представлена схема, иллюстрирующая матрицу, другой способ и систему, использующую наклоненный по отношению к входному оптическому пучку оптический элемент.
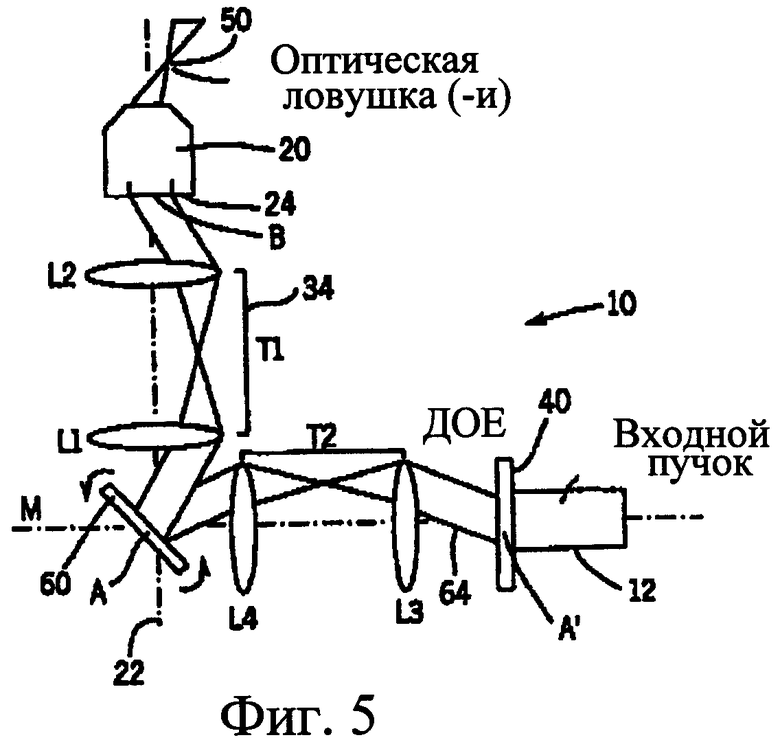
На фиг.5 представлена схема, иллюстрирующая непрерывно транслируемую матрицу оптического пинцета (ловушку), использующую дифракционный оптический элемент.
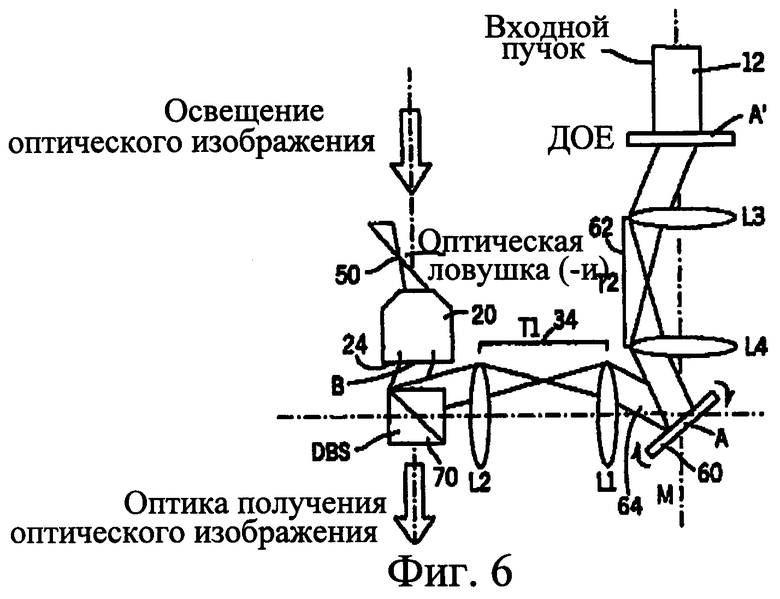
На фиг.6 представлена схема, иллюстрирующая способ и систему для манипуляции частицами, используя матрицу оптических пинцетов, при этом также формируя изображение для визуального наблюдения матрицы оптической ловушки.
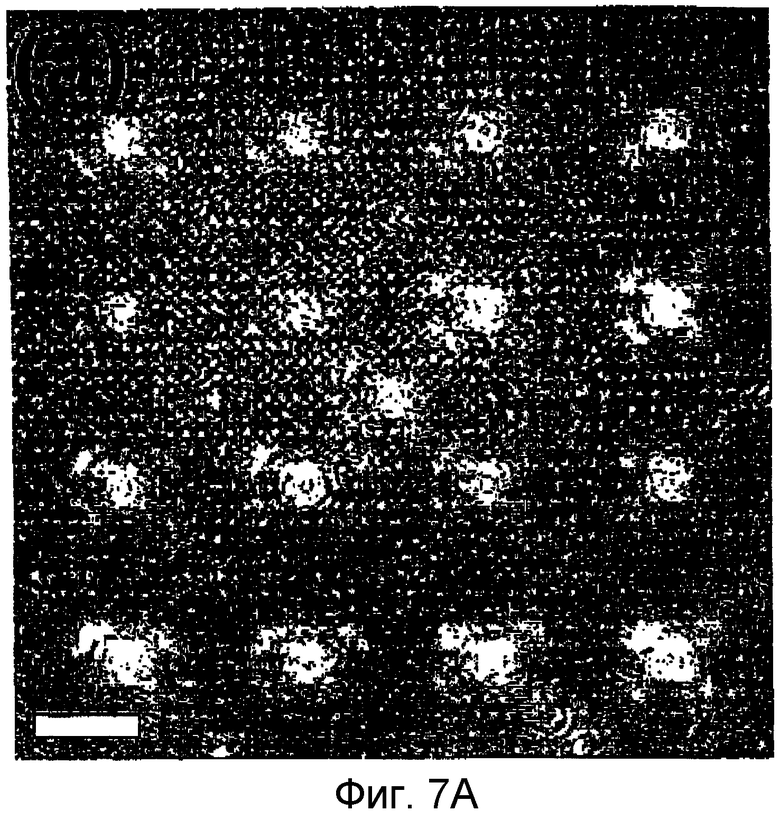
На фиг.7A представлено изображение матрицы четыре на четыре оптических пинцетов (ловушек), используя оптическую систему согласно фиг.6.
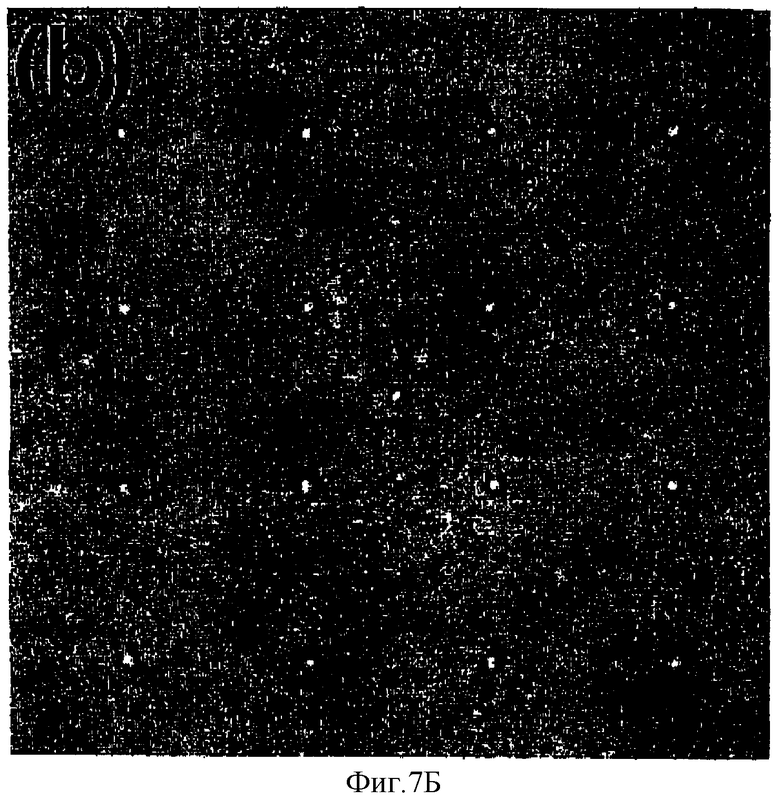
фиг.7Б представлено изображение сфер диаметром один микрометр из диоксида кремния, суспендированных в воде оптическим пинцетом согласно фиг.7A, сразу же после того, как захватывающее освещение было выключено, но до того, как сферы диффундировали из данной области.
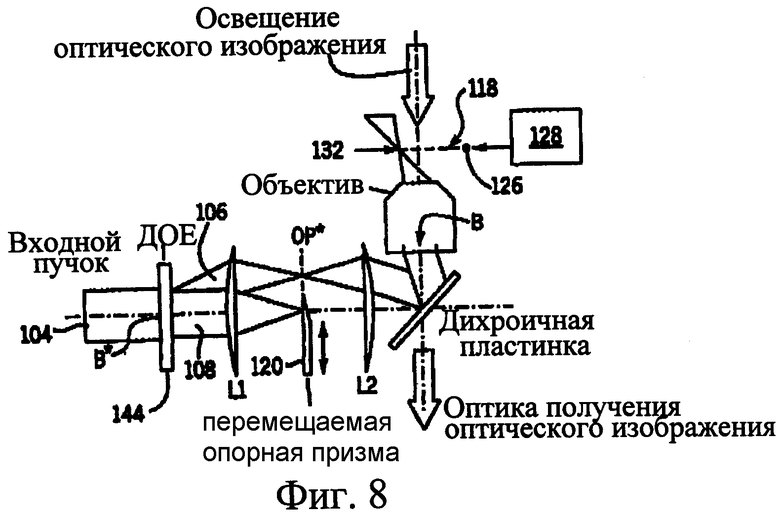
На фиг.8 представлена схема голографической оптической систему ловушки, включающей признак перемещаемой опорной призмы.
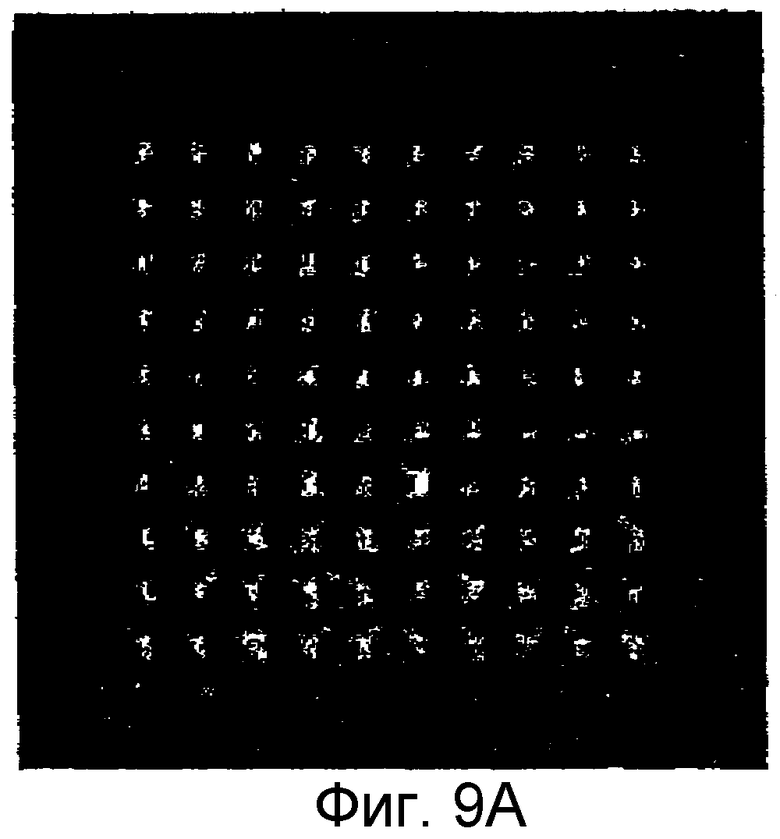
На фиг.9A представлена матрица оптических ловушек 10x10, сформированных на границе раздела стекло-вода.
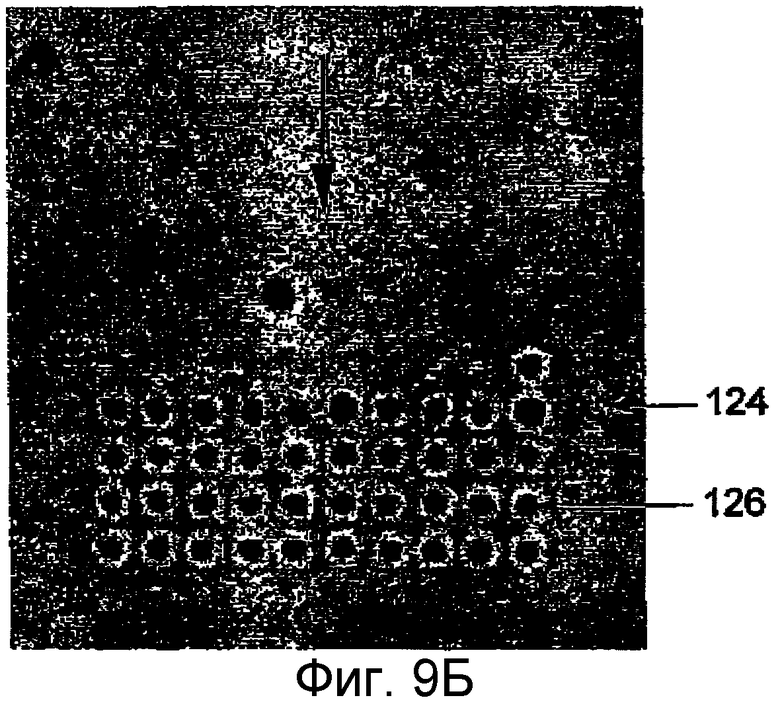
На фиг.9Б представлены оптические ловушки, с фокусом приблизительно на 2 микрона выше стекла, а пятый ряд оптических ловушек экспонирован для того, чтобы вызвать протекание частиц.
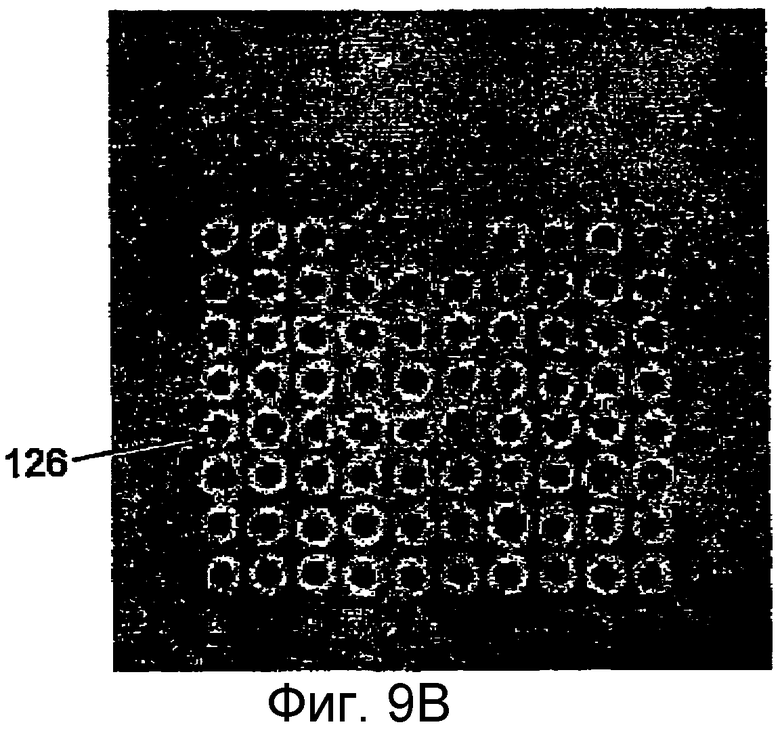
На фиг.9В представлена иллюстрация дополнительного заполнения частицами по сравнению с фиг.9Б с заполнением восьмого ряда оптических ловушек,
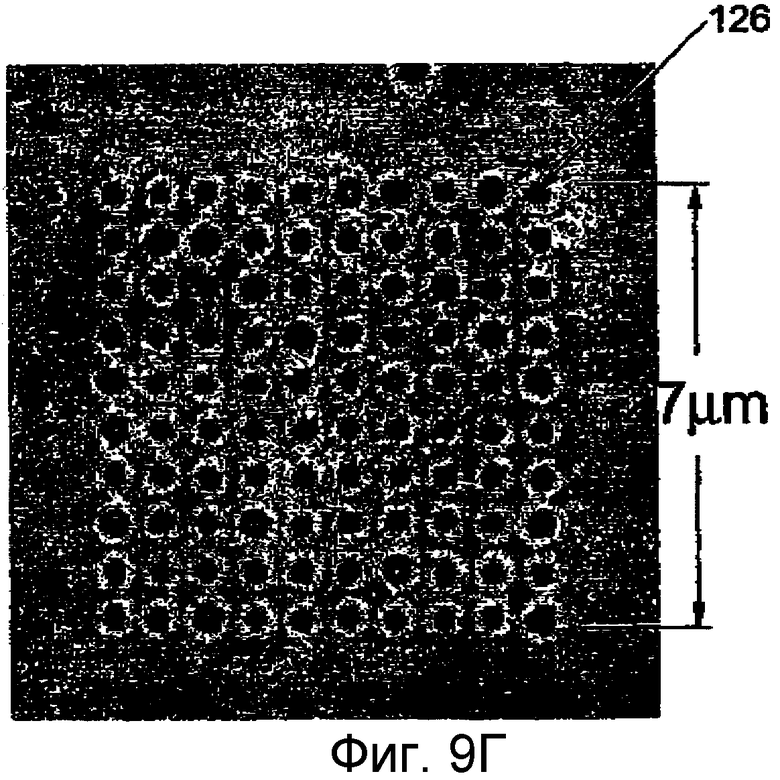
На фиг.9Г представлена иллюстрация полностью заполненной конфигурации оптических ловушек.
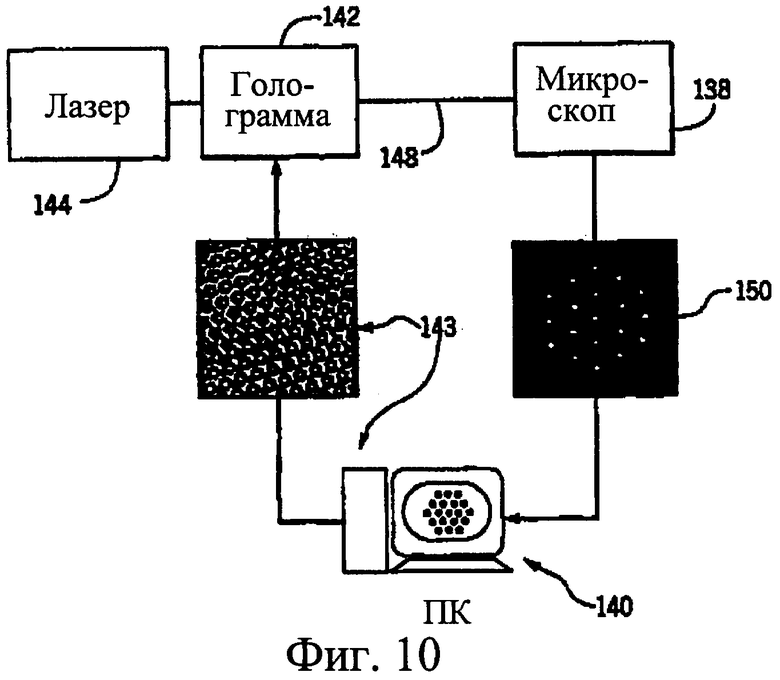
На фиг.10 представлена схема оптической системы управления ловушками с визуализацией микроскопом.
Подробное описание предпочтительных вариантов реализации изобретения
Для лучшего понимания особенностей изобретения фиг.1 и 2 иллюстрируют несколько способов и систем известных из уровня техники. Сначала будут рассмотрены указанные системы, а затем изобретение будет описано в терминах предпочтительных примеров вариантов реализации согласно фиг.3-7A и 7Б. В системе 10 оптического пинцета из фиг.1, известной из уровня техники, оптические градиентные силы являются результатом использования одиночного пучка света 12 к манипулируемой управляемым способом маленькой диэлектрической частице 14, диспергированной в среде 16, показатель преломления которой nm меньше, чем показатель преломления частицы 14. Природа оптических градиентных сил хорошо известна и также хорошо известно, что данный принцип был обобщен таким образом, чтобы также позволить осуществлять манипуляцию отражением, поглощением и низкой диэлектрической проницаемостью частиц. Любой из этих способов может быть осуществлен в контексте изобретения, описанного далее, и будет здесь затрагиваться с использованием терминологии оптического пинцета, оптической ловушки и оптической градиентной силы ловушки.
Система 10 оптического пинцета применяется, используя световой пучок 12 (такой, как лазерный пучок), способный прикладывать необходимые силы, требующиеся для осуществления эффекта оптического захватывания, необходимого для управления частицей. Задача оптического пинцета 10 традиционного вида заключается в проектировании одного или нескольких сформированных пучков света в центр задней апертуры 24 конвергируемого оптического элемента (такого, как объектив 20). Как отмечено на фиг.1, световой пучок 12 имеет ширину "w", а также имеет входной угол ⊘ относительно оптической оси 22. Световой пучок 12 является входным по отношению к задней апертуре 24 линзы 20 объектива и выходным от передней апертуры 26, существенно сходящимся к фокальной точке 28 в фокальной плоскости 30 визуализируемого объема 32, с фокальной точкой (фокусом) 28, совпадающей с оптической ловушкой 33. Вообще говоря, любая фокусирующая оптическая система может формировать базу для системы 10 оптического пинцета.
В случае светового пучка 12, являющегося коллимированным лазерным пучком, ось которого совпадает с оптической осью 22, световой пучок 12 входит в заднюю апертуру 24 объектива 20 и попадает в фокус визуализируемого объема 32 в центральной точке "c" фокальной плоскости 30 объектива. Когда ось светового пучка 12 смещается на угол ⊘ относительно оптической оси 22, ось 31 пучка и оптическая ось 22 совпадают в центральной точке "B" задней апертуры 12. Указанное смещение позволяет осуществить трансляцию оптической ловушки поперек поля зрения на величину, которая зависит от углового увеличения объектива 20. Две переменные, угол ⊘ смещения и варьируемая сходимость светового пучка 12, могут использоваться для сформирования оптической ловушки в выбранных положениях в пределах объема 32 визуализации. При условии, что к задней апертуре 24 под различными углами ⊘ и с различными степенями коллимации применяются множественные пучки света 12, множественные оптические ловушки 33 могут быть размещены в различных местоположениях.
Для осуществления оптического захватывания по трем измерениям оптические градиентные силы, созданные на частице, которая должна быть захвачена, должны превысить другие влияния излучения, возникающие вследствие рассеяния и поглощения света. Вообще говоря, это неизбежно влечет за собой необходимость иметь на задней апертуре 24 соответствующую форму волнового фронта светового пучка 12. Например, для гауссовского входного лазерного пучка с модой TEMOO, диаметр пучка w должен по существу совпадать с диаметром задней апертуры 24. Аналогичные условия могут быть сформулированы для более общих профилей пучков (таких как профили Гаусса-Лаггера).
В другой системе, известной из уровня техники согласно фиг.2, система 10 оптического пинцета может транслировать оптическую ловушку 33 поперек поля зрения объектива 20. Телескоп 34, сконструированный из линз LI и L2, устанавливает точку А, являющуюся оптически сопряженной к центральной точке В системы из уровня техники согласно фиг.1. В системе, изображенной на фиг.2, световой пучок 12, проходящий через точку А, также проходит через точку B и, таким образом, удовлетворяет основным требованиям создания системы 10 оптического пинцета. Для оптимизирования характеристики передачи телескопа 34 степень коллимации поддерживается позиционированием линз Ll и L2, как изображено на фиг.2. В дополнение к этому может быть выбрано подходящее увеличение телескопа 34 для оптимизирования углового смещения светового пучка 12, а также его ширины w в плоскости задней апертуры 24 объектива 20. Как установлено выше, для сформирования нескольких связанных оптических ловушек могут использоваться несколько световых пучков 12. Такие множественные пучки 12 могут быть созданы из множественных независимых входных пучков или от одного пучка, управляемого обычными отражающими и/или преломляющими оптическими элементами.
В одном предпочтительном варианте реализации изобретения, изображенном на фиг.3, могут быть сформированы произвольные матрицы оптических ловушек. Дифракционный оптический элемент 40 располагают по существу в плоскости 42, сопряженной с задней апертурой 24 объектива 20. Заметим, что для простоты показан только одиночный дифрагированный выходной пучок 44, однако должно быть понятно, что дифракционным оптическим элементом 40 может быть создано множество таких пучков 44. Входной световой пучок 12, падающий на дифракционный оптический элемент 40, расщепляется на конфигурацию пучков 44, в зависимости от природы дифракционного оптического элемента 40, каждый из которых исходит из точки A. Таким образом, выходные пучки 44 также проходят через точку B как следствие расположения оптических элементов, описанных выше, по ходу пучка.
Дифракционный оптический элемент 40 согласно фиг.3 изображен расположенным перпендикулярно но по отношению к входному световому пучку 12, однако возможны другие схемы расположения. Например, на фиг.4 световой пучок 12 поступает под наклонным углом β по отношению к оптической оси 22 и не по нормали к дифракционному оптическому элементу 40. В данном варианте реализации дифрагированный пучок 44, исходящий из точки А, формирует оптические ловушки 50 в фокальной плоскости 52 объема 32 визуализации (см., лучше всего, фиг.1). В данной схеме системы 10 оптического пинцета недифрагированная часть 54 входного светового пучка 12 может быть удалена из системы 10 оптического пинцета. Таким образом, указанная конфигурация позволяет осуществлять обработку меньшего количества фоновой засветки и улучшает коэффициент использования и эффективность формирования оптических ловушек.
Дифракционный оптический элемент 40 может включать голограммы, генерируемые компьютером, которые расщепляют входной световой пучок 12 на предварительно заданную конфигурацию. Объединение таких голограмм с оставшимися оптическими элементами из фиг.3 и 4 позволяет создавать произвольные матрицы, в которых дифракционный оптический элемент 40 используется для независимого формования волнового фронта каждого дифрагированного пучка. Таким образом, оптические ловушки 50 могут быть расположены не только в фокальной плоскости 52 объектива 20, но также и вне фокальной плоскости 52 для формирования трехмерного расположения оптических ловушек 50.
В систему 10 оптического пинцета согласно фиг.3 и 4 также включается фокусирующий оптический элемент, такой как объектив 20 (или эквивалентное объективу по функциям оптическое устройство, такое как линза Френеля), для того, чтобы собрать дифрагированный пучок 44 для формирования оптических ловушек 50. Далее, телескоп 34 или другая эквивалентная переносящая оптика создает точку А, сопряженную с центральной точке B предыдущей задней апертуры 24. Дифракционный оптический элемент 40 помещается в плоскости, в которой находится точка A.
В другом варианте реализации изобретения произвольные матрицы оптических ловушек 50 могут быть созданы без использования телескопа 34. В таком варианте реализации дифракционный оптический элемент 40 может быть помещен непосредственно в плоскость, включающую точку B.
В системе 10 оптического пинцета могут использоваться статические или изменяемые в зависимости от времени дифракционные оптические элементы 40. Для динамической или же зависящей от времени версии можно создавать изменяющиеся во времени матрицы оптических ловушек 50, которые могут быть частью системы, использующей такое свойство. В дополнение к этому указанные динамические оптические элементы 40 могут использоваться для активного перемещения частицы и матричной среду относительно друг друга. Например, дифракционный оптический элемент 40 может быть жидкокристаллической фазовой матрицей, испытывающей изменения, внесенные с помощью генерируемых компьютером голографических конфигураций.
В другом варианте реализации изобретения, иллюстрированном фиг.5, система может быть построена таким образом, чтобы осуществлять непрерывную трансляцию ловушки 50 оптического пинцета. Зеркало 60 в карданном подвесе помещено таким образом, чтобы центр его вращения находился в точке A. Световой пучок 12 падает на поверхность зеркала 60, он имеет ось, проходящую через точку А, и будет проектироваться на заднюю апертуру 24. Наклон зеркала 60 вызывает изменение угла падения светового пучка 12 по отношению к зеркалу 60, и данное свойство может быть использовано для транслирования результирующей оптической ловушки 50. Второй телескоп 62 сформирован из линз L3 и L4, которые создают точку А', являющуюся сопряженной по отношению к точке A. Дифракционный оптический элемент 40, помещенный в точке А', теперь создает конфигурацию дифрагированных пучков 64, каждый из которых проходит через точку А для формирования одной из ловушек 50 оптического пинцета в матрице оптической пинцетной системы 10.
При функционировании варианта реализации согласно фиг.5 зеркало 60 транслирует всю пинцетную матрицу как модуль. Указанный способ преимуществен для точного выравнивания оптической пинцетной матрицы со стационарной подложкой для динамического смещения оптической ловушки 50 на быстрые осциллирующие смещения с маленькой амплитудой, так же как и для любых применений, требующих наличия способности общей трансляции.
Матрица оптических ловушек 50 также может смещаться вертикально по отношению к предметному столику образца (не показан) посредством перемещения предметного столика образца или же регулировкой телескопа 34. В дополнение, матрица оптического пинцета также может смещаться в боковые стороны по отношению к образцу, перемещая предметный столик образца. Указанная особенность была бы, в частности, полезной для крупномасштабного перемещения, вне области поля зрения объектива.
В другой разновидности изобретения, изображенного на фиг.6, оптическая система построена таким образом, чтобы позволять проводить рассмотрение изображений частиц, захваченных оптическим пинцетом 10. Дихроичный светоделитель 70, или другой эквивалент оптического светоделителя, помещен между объективом 20 и последовательностью оптических элементов оптической пинцетной системы 10. В иллюстрируемом варианте реализации изобретения светоделитель 70 селективно отражает длину волны света, используемую для формирования оптической пинцетной матрицы, и пропускает другие длины волн. Таким образом, световой пучок 12, используемый для формирования оптических ловушек 50, передается к задней апертуре 24 с высокой эффективностью, в то время как световой пучок 66, используемый для формирования изображения, может проходить к визуализирующей оптике (не показано).
Иллюстрация описания изобретения изображена на фиг.7A и 7Б. Дифракционный оптический элемент 40 разработан таким образом, чтобы взаимодействовать с единичным световым пучком 12 для создания матрицы коллимированных пучков 4×4. Nd:YAG лазер мощностью 100 мВт, с диодной накачкой и удвоением частоты, работающий на длине волны 532 нм, обеспечивает гауссовскую форму TEMOO для светового пучка 12. На фиг.7A поле зрения частично освещается лазерным светом, рассеянным назад шестнадцатью сферами из диоксида кремния, захваченными в шестнадцать первичных оптических пинцетов 10 матрицы. Сферы диаметром 1 мкм рассеяны в воде и помещены в объем образца между предметным стеклом микроскопа и покровным стеклом толщиной 170 мкм. Пинцетная матрица проектируется вверх через покровное стекло и позиционируется в плоскости на 8 мкм выше покровного стекла и более чем на 20 мкм ниже предметного стекла микроскопа. Сферы диоксида кремния устойчиво захвачены по трем измерениями в каждом из шестнадцати оптических пинцетов 10.
На фиг.7Б изображено организованное оптическим способом расположение сфер через 1/30 секунды после того, как были выключены оптические пинцеты 10 (ловушки), но до того как сферы получили время чтобы диффундировать из области ловушки.
Режим работы адаптивного пинцета
В других вариантах реализации изобретения базовый вариант реализации оптической ловушки, описанный выше, может использоваться в различных полезных методологиях. Кроме того, другие варианты реализаций включают устройства и системы, которые могут быть сконструированы для применения указанных способов улучшения функционирования и использования оптических ловушек. В частности, оптические ловушки могут быть управляемыми и изменяемыми, и ниже описаны различные варианты реализаций, использующие такие особенности.
Разнообразие новых вариантов использования и новых применений оптических ловушек может возникать из изменяющейся во времени конструкции и динамического изменения конфигурации оптической ловушки. В одной разновидности изобретения матрица оптических ловушек может предпочтительно управляться способом, изображенным на фиг.8. В оптической системе 100 дифракционный оптический элемент 102 расщепляет коллимированный лазерный пучок 104 на несколько (два или больше) лазерных пучка 106 и 108. Каждый из лазерных пучков 106 и 108 передается в отдельную оптическую ловушку в плоскости 118 объекта. Каждый из данных индивидуальных лазерных пучков 106,108 передается на заднюю апертуру 110 объектива 112 посредством функционирования традиционной оптической схемы, такой как телескоп, сформированный линзами 114 и 116. Объектив 112 фокусирует каждый из данных пучков 106, 108 в отдельную оптическую ловушку 132 в плоскости 118 объекта. В предпочтительном варианте реализации изобретения опорная призма 120 размещена с возможностью перемещения по пути прохождения лазерных пучков 106, 108, позволяя, таким образом, осуществлять селективное блокирование какого-либо одного (одних), выбранного из индивидуальных лазерных пучков 106, 108 для селективного предотвращения формирования части оптических ловушек 132. Такая методология и структура позволяют конструировать произвольные требуемые матрицы оптических ловушек 132 при помощи соответственно разработанных призм или апертурных структур призм, а также структур, подобных таковым.
Иллюстрация использования такой методологии управления оптической ловушкой изображено на фиг.9, в которой оптические ловушки 132 сформированы дифракционным оптическим элементом 122 голографического типа. Перемещаемая опорная призма 120 согласно фиг.8 может блокировать все предпоследние строки 124 оптических ловушек 132. Каждая из строк 124 может быть создана посредством систематического перемещения опорной призмы 120, что обеспечивает систематическое заполнение оптических ловушек 132 частицами 126. Указанная методология позволяет заполнять оптические ловушки 132 разнообразием различных типов частиц 126, а также позволяет избежать типичной проблемы частиц 126, стремящихся заполнить предпочтительно внешние участки матрицы оптических ловушек 132. Подобное предпочтительное заполнение может, таким образом, блокировать заполнение внутренних оптических ловушек 132. Указанное управляемое формирование оптических ловушек 132 также позволяет осуществить прецизионное формирование и изменение расположения оптических ловушек.
В дополнение к детальному управлению по заполнению матрицы оптических ловушек 132 можно обеспечить устройства, ускоряющие заполнение оптических ловушек 132. Например, на фиг.8 изображен функциональный блок 128, показывающий устройство, предназначенное для: (1) вывода отселектированных частиц 126 (см. фиг.10), (2) подачи на частицы 126 дифференциального давления (посредством электрофореза или электроосмотического воздействия), (3) применения температурного градиента, и (4) транслирования всей матрицы оптических ловушек через суспензию, содержащую частицы 126, способом наподобие "рыбацкой сети".
Экспериментально было установлено, что частицы 134 могут, например, быть заполнены в оптические ловушки 132, начиная с концентрации частиц порядка 10-4 μм-3, а обоснованная скорость потока имеет порядок l00 μм/секунду для заполнения одного ряда строк 124 или конфигурацию матрицы приблизительно за время, равное одной минуте. Полностью построенная матрица частиц 126 может быть выполнена перманентно посредством перенесения матрицы на подложку или посредством желерования текучей среды, в которой суспендированы частицы 126. Указанная процедура также может позволить осуществить конструирование большого разнообразия матриц различных частиц и связанных матриц частиц 126. Используя описанные выше характеристики и функциональные возможности оптических ловушек 132, каждая из частиц 126 также может быть далее опрошена, визуализирована и подвергнута манипулированию для операционного использования и исследовательских целей.
В еще одном варианте реализации изобретения, в зависимости от специфического оптического требования, оптические ловушки 132 могут динамически изменяться. Оптическое требование может быть осуществлено при помощи компьютерной программы с требуемой инструктивной информацией, так что одна или несколько оптических ловушек 132 могут использоваться для модифицирования, удаления или добавления частиц на различные центры оптических ловушек, или дать возможность осуществлять различные манипуляции с единичным объектом. Далее, одна или несколько оптических ловушек 132 могут перемещаться, а их характер изменен (например, изменяя форму или прочность ловушки) для динамической манипуляции произвольным объектом, таким как клетки растения или животного. В частности, указанная операция может быть преимущественной при манипулировании тонкой структуры, или же тогда, когда есть необходимость осуществлять сложные манипуляции объекта. До настоящего времени такие объекты обрабатывались одной силовой ловушкой, которая могла бы вызвать повреждение объекта или не обеспечить степени свободы, которые являются часто необходимыми, чтобы выполнить требуемую функцию.
В дополнение к этому в другом процессе частицы 126 могут быть динамически рассортированы по размерам. Также можно отобразить матрицу частиц 126 способом, изображенным на фиг.10. Микроскоп 138 может отображать частицы 126, а персональный компьютер 140 может их идентифицировать, а также вычислять фазу чистой голограммы 142 (для дифракционного оптического элемента 144 из фиг.8). Чтобы захватить в ловушку упомянутые частицы, управляемый компьютером пространственный световой модулятор 143 может создавать спроектированную компьютером голограмму 142, осуществляя применение конфигурации фазовых модуляций к лазерному пучку 144. Для произвольного разнообразия целей указанная операция также может быть динамически варьируемой. Модифицированный лазерный пучок 148 (также см. отдельные лазерные пучки 106, 108 на фиг.8) фокусируется микроскопом 138 для формирования матрицы оптических ловушек 132 (также известную как пинцеты), которая захватывает частицы 126 для отображения на экране 150 визуализации. Затем, каждая из частиц 126 может быть индивидуально подвергнута манипулированию для сборки в требуемую структуру, отсортировать частицы 126, или же манипулировать ими каким либо другим способом, осмотреть или изменить форму интересующего объекта.
В то время как были показаны и описаны предпочтительные варианты реализаций изобретения, специалисту, квалифицированному в уровне техники, будет ясно, что, не выходя за пределы изобретения в его более широких аспектах, могут быть выполнены различные изменения и модификации, как сформулировано в Формуле изобретения, приведенной ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования оптической ловушки с хиральной симметрией | 2021 |
|
RU2781504C1 |
| Способ создания оптического пинцета с конфигурируемым массивом вихревых лазерных пучков | 2023 |
|
RU2807969C1 |
| Оптическая ловушка | 2022 |
|
RU2795383C1 |
| ЛАЗЕРНОЕ ТЕРАПЕВТИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2528659C1 |
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| МНОГОПЛЕЧЕВАЯ СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ НА ОСНОВЕ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ | 2019 |
|
RU2747380C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ, ВОЗДЕЙСТВИЯ И НАБЛЮДЕНИЯ ЗА МАЛЕНЬКИМИ ЧАСТИЦАМИ, В ОСОБЕННОСТИ БИОЛОГИЧЕСКИМИ ЧАСТИЦАМИ | 1994 |
|
RU2120614C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ НЕПРОЗРАЧНЫХ МИКРООБЪЕКТОВ | 2012 |
|
RU2488905C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЛАЗЕРНОГО ПУЧКА | 1994 |
|
RU2083039C1 |
| МНОГОКАНАЛЬНЫЙ КОНФОКАЛЬНЫЙ СПЕКТРОАНАЛИЗАТОР ИЗОБРАЖЕНИЙ | 2019 |
|
RU2723890C1 |
Способ и устройство для управления матрицами оптических ловушек и формирования матриц частиц. Способ и устройство обеспечиваются лазером и варьируемым во времени дифракционным оптическим элементом, что позволяет осуществлять динамическое управление матрицами оптических ловушек и последующее управление матрицами частиц, а также, используя множество оптических ловушек, обеспечивать возможность манипулирования единичными объектами. Технический результат - усовершенствование способа и системы для создания множества оптических ловушек. 3 н. и 27 з.п. ф-лы, 10 ил.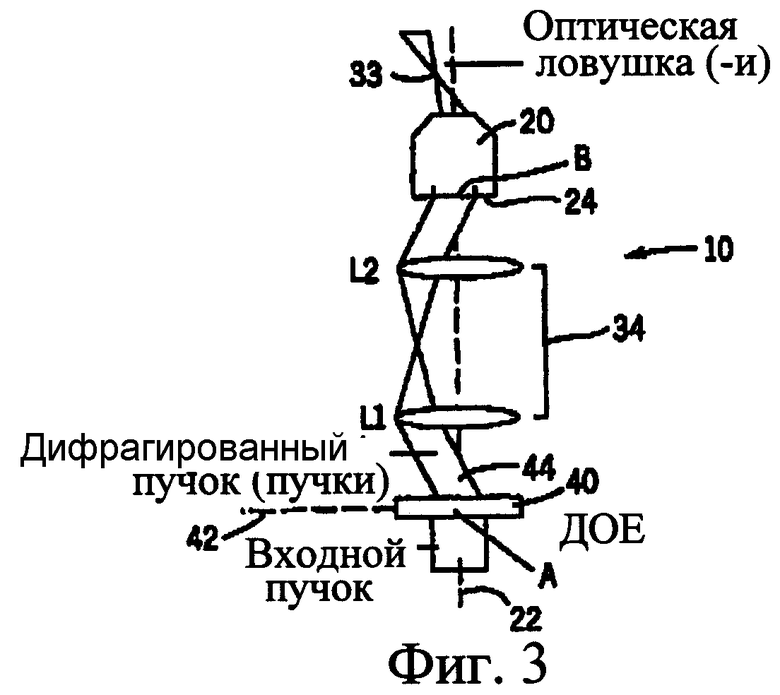
обеспечение источника маленьких частиц; обеспечение дифракционного оптического элемента в форме голограммы, выборочное блокирование, по меньшей мере, одного из множества лазерных пучков, сформированных посредством указанного дифракционного оптического элемента для формирования выбранного количества оптических ловушек в выбранных местоположениях в матрице, систематическое заполнение указанных оптических ловушек маленькими частицами, формирование изменяющейся во времени матрицы маленьких частиц в местоположениях оптических ловушек посредством выборочного блокирования во времени указанных лазерных пучков.
| US 6055106 A, 25.04.2000 | |||
| US 5939716 A, 17.08.1999 | |||
| US 5935507 A, 10.08.1999 | |||
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ, ВОЗДЕЙСТВИЯ И НАБЛЮДЕНИЯ ЗА МАЛЕНЬКИМИ ЧАСТИЦАМИ, В ОСОБЕННОСТИ БИОЛОГИЧЕСКИМИ ЧАСТИЦАМИ | 1994 |
|
RU2120614C1 |

