Данное изобретение относится к области испытаний сложного оборудования на нагрузки, действующие при его эксплуатации. В частности, к области испытаний на вибрационные и ударные воздействия специальных грузов на нагрузки, возникающие при авиационном транспортировании, и может быть использовано при проведении отработочных испытаний сложного оборудования (например, космических аппаратов).
В настоящее время имеется достаточно много различных способов испытаний космических аппаратов (КА). Испытания на механические воздействия, как правило, включают испытания на гармоническую вибрацию (ГВ), на широкополосную случайную вибрацию (ШСВ), на ударные воздействия по методу ударных спектров ускорений (УСУ) (см. Вибрации в технике. Справочник в 6 томах. Т.5. Под редакцией М.Д.Генкина. М.: Машиностроение, 1981 г., стр. 455-456, 459-472, 475-487). Или «Испытательная техника». Справочник в 2х томах. Под редакцией В.В.Клюева. Книга 1. М.: Машиностроение, 1982 г., стр. 287-289, 334-337, или В.Ф.Гладкий «Прочность, вибрация и надежность конструкции летательного аппарата». М.: Наука, 1975 г., стр. 415-420. Формирование режимов нагружения и отработку прочности конструкции (В.Ф.Гладкий «Прочность, вибрация и надежность конструкции летательного аппарата». М.: Наука, 1975 г., стр. 19) проводят обычно на динамически подобных инженерных моделях КА.
Наиболее близким является способ испытаний космических аппаратов по патенту РФ 2171974 (прототип), заключающийся в нагружении динамически подобного макета вибрационными и ударными воздействиями. Испытания проводятся последовательно на каждый вид нагружения. При этом нагружение проводится на разных режимах от минимальных значений до максимальных. К недостаткам используемых методов относится то, что режимы испытаний для этих методов формируются из наихудших условий эксплуатации обычных грузов, и они не корректируются по данным, полученным по результатам транспортирования специальных грузов - аналогов. Использование нормированных значений для обычных грузов при отработке приводит к завышению режимов нагружения транспортируемого груза (реально в предельных условиях эксплуатации самолетов специальные грузы не транспортируются).
Предлагаемое решение позволит исключить отмеченные недостатки.
Суть изобретения заключается в последовательном нагружении динамического макета транспортируемого груза наперед заданными вибрационными и ударными воздействиями. Отличие от известных способов в том, что режимы нагружения формируют по результатам измерений, полученных при транспортировании грузов - аналогов, причем из данных измерений для каждой точки контроля формируют псевдоисходный процесс с длительностью, равной их общей длительности, после чего из созданного псевдоисходного процесса с помощью датчика случайных чисел формируют множества фиктивных выборок, по которым проводят оценку изменчивости параметра генеральной совокупности по изменчивости его оценок, полученных в фиктивных выборках, после чего делают заключение о стационарности полученного процесса. При заключении о нестационарности процесса исключают из созданного псевдоисходного процесса составляющие с уровнями, выше некоторой наперед заданной величины. Затем повторяют исследование стационарности и исключение максимальных составляющих до получения стационарного псевдоисходного процесса. Далее из начального псевдоисходного процесса вычитают стационарную часть псевдоисходного процесса. После чего для стационарной составляющей вычисляют спектральную плотность мощности виброускорения, а для нестационарной части - ударные спектры ускорений (далее УСУ), причем количество фиктивных выборок для вычисления ударных спектров и спектральной плотности мощности виброускорения увеличивают до тех пор, пока погрешность не стабилизируется. При этом полученные значения спектральной плотности мощности виброускорений и ударных спектров ускорений используют для нагружения динамического макета транспортируемого груза вибрационными и ударными воздействиями, а задание режима испытаний проводят по точкам контроля, которые используют для формирования псевдоисходного процесса.
При авиационном транспортировании специальных грузов, таких как, например, КА, практически всегда проводится контроль нагружения, что дает уверенность в отсутствии при транспортировании несанкционированных воздействий на груз. Контроль проводится при всех этапах транспортирования (разбег, набор высоты, крейсерский полет, заход на посадку, пробег при посадке). Полученная информация представляется в виде временных массивов (зависимости ускорений от времени). Однако отработка КА проводится на режимах, заданных разработчиком самолета. В то же время по результатам нескольких транспортировок и получении набора информации о реальных условиях транспортирования можно сформировать соответствующие режимы испытаний.
Получение статистически обоснованных режимов испытаний по обычной схеме чрезвычайно затруднено (приходится сталкиваться со сравнительно небольшим и даже малым числом опытов), т.к. количество КА одного типа и, соответственно, количество случаев транспортирования мало и, как правило, не превышает 10-15 аппаратов (даже с учетом аналогов) за все время производства КА.
В этом случае для определения характеристик случайных процессов по результатам небольшого числа опытов используются те же формулы, которые применяются и при большом числе опытов, и транспортирование уже 3-4 аппаратов в разных погодных условиях и времени года позволяют получать приемлемые результаты. Полученные данные по транспортировке, например случай посадки, собираются в один сплошной файл (псевдоисходный процесс), из которого с помощью датчика случайных чисел формируют множества фиктивных выборок, т.е. делаются выборки определенной длины (для момента посадки это длительности ˜2-4 секунд) и по этим выборкам делается статистическая обработка. По полученным фиктивным выборкам проводят оценку изменчивости параметра генеральной совокупности по изменчивости его оценок (среднего, дисперсии и т.д.). Сначала проверяется стационарность процесса. Если процесс нестационарный, то из него начинают исключать составляющие с определенным уровнем амплитуд. Исключение проводят следующим образом. На графике псевдоисходного процесса (зависимость ускорения от времени) проводят прямую определенного уровня ускорений и находят точки пересечения прямой с временной зависимостью. Две ближайшие точки пересечения сводят в одну и таким образом исключают максимальные ускорения. Очевидно, что график псевдоисходного процесса как бы уменьшается и по времени на суммарную длительность отброшенных амплитуд. После этого вновь проверяется стационарность уже нового псевдоисходного процесса. И так делается до тех пор, пока не получают стационарный процесс. В результате получают два псевдоисходных процесса: первичный, включающий в себя как стационарные, так и нестационарные составляющие, так и выделенный стационарный процесс. Теперь необходимо выделить нестационарные составляющие. Наиболее простой способ состоит в разложении в ряд Фурье обоих процессов и вычитании из полученных коэффициентов ряда Фурье псевдоисходного процесса соответствующих коэффициентов стационарного процесса. Затем, выполняя обратное преобразование Фурье, получают нестационарный процесс.
Таким образом, псевдоисходный процесс разделен на два процесса: стационарный и нестационарный. Далее каждый из них подвергается соответствующей обработке. Для стационарного процесса строится спектральная плотность мощности (далее СПМ) виброускорения, а для нестационарного ударные спектры ускорений, которые и служат основой для формирования режимов испытаний. Недостаточная статистика по реализациям процессов транспортирования дополняется за счет фиктивных выборок. Число выборок для вычисления ударных спектров и спектральной плотности мощности виброускорения увеличивают до тех пор, пока погрешность не стабилизируется, при этом полученные значения спектральной плотности мощности виброускорений и ударных спектров ускорений используют для нагружения динамического макета транспортируемого груза вибрационными и ударными воздействиями. Задание режима нагружения необходимо проводить по точкам контроля, которые используют для формирования псевдоисходного процесса. Сама процедура задания режимов нагружения может проводиться с использованием различной стратегии (по максимальным значениям спектральной мощности виброускорений и УСУ, по их минимальным значениям, по среднему и т.д.).
По результатам каждого нового случая транспортировки режимы уточняются по рассмотренному алгоритму.
Пример практического исполнения.
По результатам 12 случаев измерений при авиационном транспортировании, когда проводился контроль уровней нагружения, был сформирован псевдоисходный процесс. Такой процесс формировался для трех режимов транспортирования: "взлет-посадка", "набор высоты - заход на посадку", "крейсерский полет". Рассмотрим в качестве примера режим "взлет-посадка".
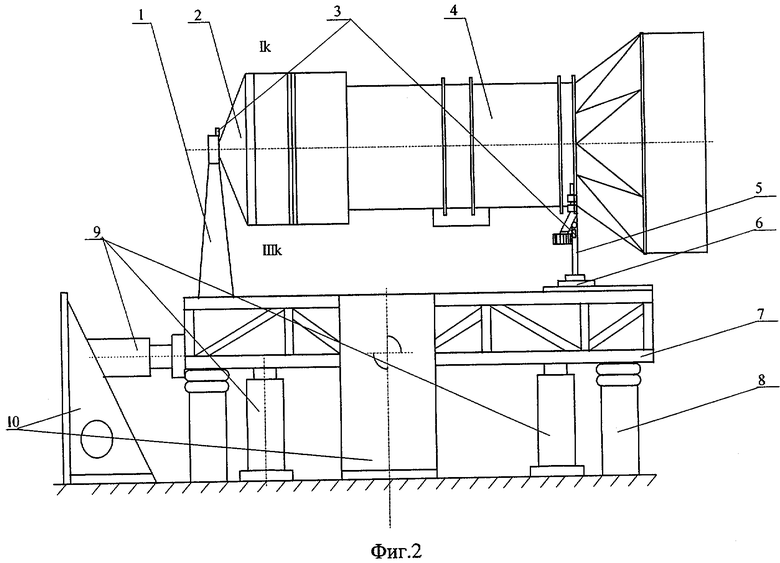
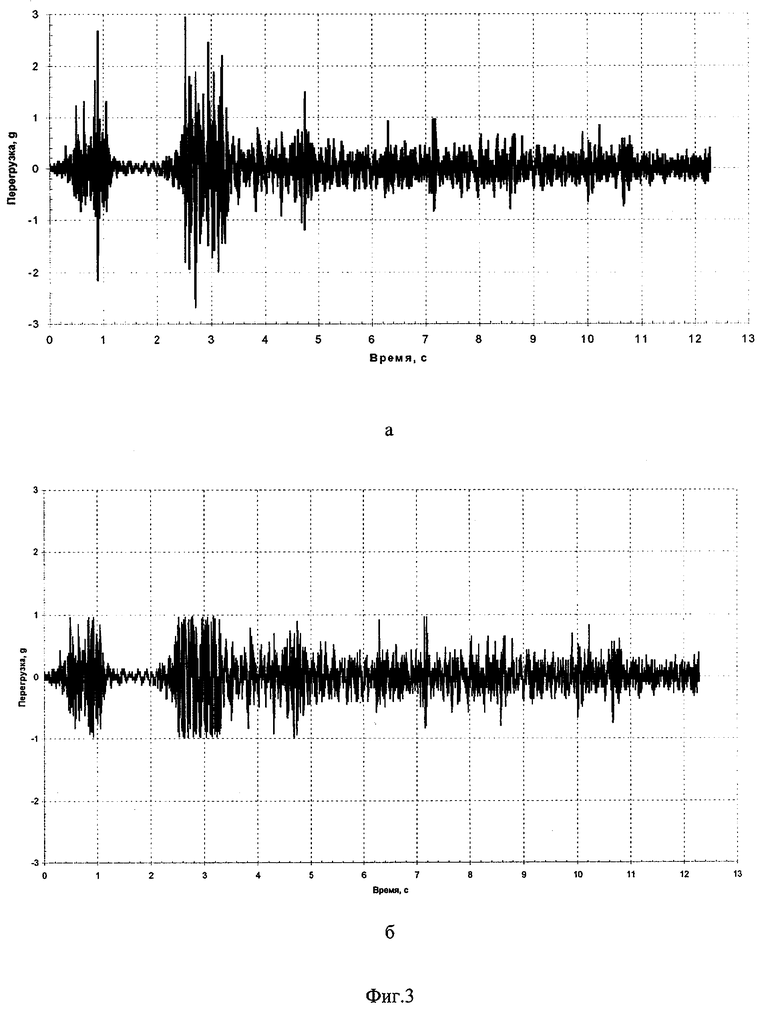
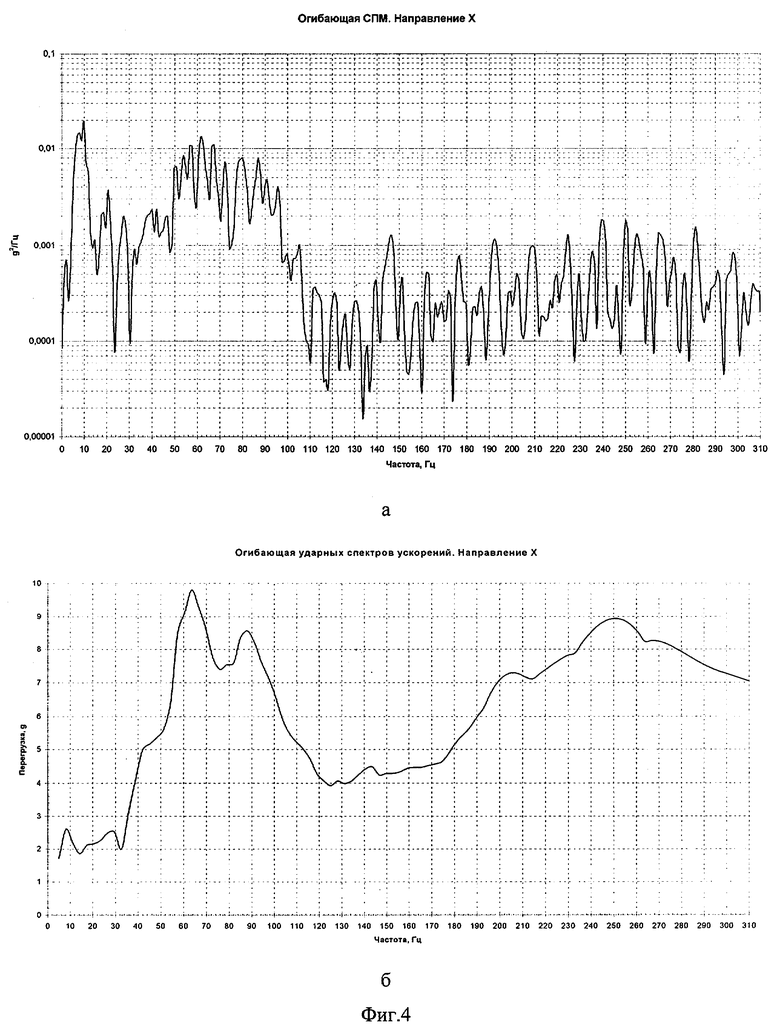
Реализация указанного способа поясняется устройством, где на фиг.1 показана схема транспортирования КА. Контрольные датчики устанавливались на передней (В1) и задней (В2) опорах. На фиг.2 показана типовая схема испытаний, которая состоит из задней опоры 1, транспортировочного кольца 2, задающих акселерометров 3, изделия 4, передней опоры с кронштейном 5, переходной опоры 6, рамы 7, пневмоопоры 8, силовозбудителя 9, кронштейна 10. Испытания проводятся с заданием режимов по точкам контроля (3), совпадающими с контрольными точками В1 и В2 при транспортировании. Типовая виброграмма с датчика на задней опоре транспортируемого КА показана на фиг.3а. На фиг.3б показана виброграмма с исключенными амплитудами свыше 1g. На фиг.4 показаны полученные в результате обработки по рассмотренному алгоритму значения СПМ (а) и УСУ (б). Из таких отрезков и формировался псевдоисходный процесс по 12 случаям измерений для КА типа Экспресс AM. После выделения участков с уровнями виброускорений, превышающими ±1g, процесс оценивался как стационарный. Затем для стационарной и нестационарной частей были построены УСУ с СПМ виброускорения. Эти уровни примерно в 3-4 раза ниже заданных в нормативных документах на самолет Ил-76.
По результатам работ были откорректированы «Нормы прочности....» для ряда КА на случай авиационного транспортирования.
Из известных авторам источников информации и патентных материалов не известна совокупность признаков, сходных с совокупностью признаков заявленных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ ГРУЗОВ НА СЛУЧАЙ АВИАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 2006 |
|
RU2337338C2 |
| СПОСОБ ИСПЫТАНИЙ ПРИБОРОВ И АППАРАТУРЫ НА ТРАНСПОРТИРОВАНИЕ | 2008 |
|
RU2389995C1 |
| Способ испытаний на высокоинтенсивные ударные воздействия приборов и оборудования | 2022 |
|
RU2794872C1 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКИХ АППАРАТОВ | 1998 |
|
RU2171974C2 |
| СПОСОБ ИСПЫТАНИЙ ОБОРУДОВАНИЯ НА МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ | 2009 |
|
RU2399032C1 |
| Способ испытаний на высокоинтенсивные ударные воздействия | 2023 |
|
RU2813247C1 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКОГО АППАРАТА НА МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ | 2005 |
|
RU2305265C2 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКОГО АППАРАТА НА ВИБРОАКУСТИЧЕСКИЕ ВОЗДЕЙСТВИЯ | 2007 |
|
RU2354948C1 |
| Способ испытаний на высокоинтенсивные ударные воздействия приборов и оборудования | 2020 |
|
RU2745342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННЫХ ЧАСТОТ БАКА | 2008 |
|
RU2367920C1 |
Изобретение относится к испытательной технике. Сущность: последовательно нагружают динамический макет транспортируемого груза заданными вибрационными и ударными воздействиями. Режимы нагружения формируют по результатам измерений, полученных при транспортировании грузов - аналогов. Из данных измерений для каждой точки контроля формируют псевдоисходный процесс. Из созданного псевдоисходного процесса формируют множества фиктивных выборок, по которым проводят оценку изменчивости параметра генеральной совокупности, по изменчивости его оценок и делают заключение о стационарности полученного процесса. При выводе о нестационарности процесса исключают из созданного псевдоисходного процесса составляющие с уровнями выше некоторой наперед заданной величины. Затем повторяют исследование стационарности и исключение максимальных составляющих до получения стационарного псевдоисходного процесса. Далее из начального псевдоисходного процесса вычитают стационарную часть псевдоисходного процесса, после чего для стационарной составляющей вычисляют спектральную плотность мощности виброускорения, а для нестационарной части - ударные спектры ускорений. Полученные значения спектральной плотности мощности виброускорений и ударных спектров ускорений используют для нагружения динамического макета транспортируемого груза вибрационными и ударными воздействиями, а задание режима испытаний проводят по точкам контроля, которые используют для формирования псевдоисходного процесса. Технический результат: повышение достоверности испытаний. 4 ил.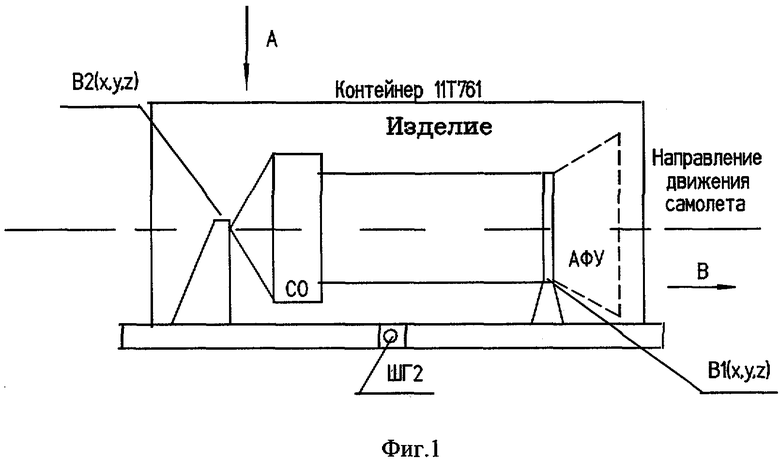
Способ испытаний грузов на случай авиационного транспортирования, заключающийся в последовательном нагружении динамического макета транспортируемого груза наперед заданными вибрационными и ударными воздействиями, отличающийся тем, что режимы нагружения формируют по результатам измерений, полученных при транспортировании грузов-аналогов, причем из данных измерений для каждой точки контроля формируют псевдоисходный процесс с длительностью, равной их общей длительности, после чего из созданного псевдоисходного процесса с помощью датчика случайных чисел формируют множества фиктивных выборок, по которым проводят оценку изменчивости параметра генеральной совокупности по изменчивости его оценок, полученных в фиктивных выборках, и делают заключение о стационарности полученного процесса, при выводе о нестационарности процесса исключают из созданного псевдоисходного процесса составляющие с уровнями, выше некоторой наперед заданной величины, затем повторяют исследование стационарности и исключение максимальных составляющих до получения стационарного псевдоисходного процесса, далее из начального псевдоисходного процесса вычитают стационарную часть псевдоисходного процесса, после чего для стационарной составляющей вычисляют спектральную плотность мощности виброускорения, а для нестационарной части - ударные спектры ускорений, причем количество фиктивных выборок для вычисления ударных спектров и спектральной плотности мощности виброускорения увеличивают до тех пор, пока погрешность не стабилизируется, при этом полученные значения спектральной плотности мощности виброускорений и ударных спектров ускорений используют для нагружения динамического макета транспортируемого груза вибрационными и ударными воздействиями, а задание режима испытаний проводят по точкам контроля, которые используют для формирования псевдоисходного процесса.
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКИХ АППАРАТОВ | 1998 |
|
RU2171974C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДЕФОРМАЦИИ И СПОСОБЫ ЕГО ИСПОЛЬЗОВАНИЯ В МЕХАНИЧЕСКИХ СТРУКТУРАХ, ПОДВЕРГАЮЩИХСЯ НАПРЯЖЕНИЮ | 1991 |
|
RU2110044C1 |
| СПОСОБ ВИБРАЦИОННЫХ ИСПЫТАНИЙ ОБЪЕКТОВ | 1990 |
|
RU1773164C |
| US 3699807, 24.10.1972. | |||

