Ядерные детекторы используются в буровой промышленности в различных целях. В некоторых случаях гамма-детекторы или нейтронные детекторы погружают в скважину для каротажа формаций. Выполняя операции измерения во время бурения и каротажа во время бурения, различные приборы, в том числе детекторы гамма-излучения или ядерного излучения, устанавливают в полости бурового инструмента и используют в режиме реального времени для производства важных измерений в процессе бурения. Почти во всех таких приложениях свободное место для установки приборов весьма ограничено. Согласно техническим решениям из уровня техники более крупные элементы детектора размещают в свободном месте за счет более эффективного использования пространства в элементах гамма-детектора, например в сцинтилляционном блоке. Однако традиционные конструкции не позволяют полностью решить важный вопрос установки детекторов в буровых инструментах и горном оборудовании. В частности, необходимо обеспечить ударную и вибрационную изоляцию всего агрегата детектора и обеспечить механическое согласование с формой полости в инструменте, при этом осуществить это с использованием минимального пространства.
В силу конфигурации и эксплуатационных требований буровых инструментов типичная конфигурация ядерного детектора (детектора ядерного излучения) и других приборных блоков в буровых инструментах является цилиндрической. Цилиндрическая форма детектора часто определяется цилиндрической формой фотоумножительных трубок, относительной простотой установки цилиндрических оптических окон и другими соображениями. В последние годы наблюдается тенденция к уменьшению диаметра буровых инструментов, что приводит к уменьшению свободного места для размещения детекторов. Наиболее непосредственный результат состоит в необходимости уменьшения диаметра блока датчика и связанной с ним электроники. Для сохранения, по возможности, чувствительности детектора иногда увеличивают длину сцинтилляционного элемента для увеличения поверхности и объема, доступных для регистрации гамма-излучения. Уменьшение свободного места также накладывает ограничения на размер измерительных и компьютерных блоков, связанных с детекторами. Таким образом, налицо общая потребность в возможности интеграции большего количества функций в меньших объемах при обеспечении механического согласования, теплового согласования и динамической подвески.
Наилучшее использование свободного места в буровом инструменте или горном комбайне достигается за счет использования модуля ядерного детектора или иного приборного модуля, имеющего такой же размер, как и доступная полость в инструменте или комбайне. Однако такой подход требует высокой степени точности размера и формы полости и размера и формы детектора. Это ограничение в отношении оборудования может приводить к дополнительным затратам и ограничивать взаимозаменяемость. Кроме того, если не принять меры предосторожности, может происходить повреждение оборудования вследствие различной степени теплового расширения.
Традиционный подход предусматривает размещение вокруг модуля детектора эластомерного материала в виде чехлов, подушек или уплотнительных колец. Чтобы эластомерный материал обеспечивал достаточную подвижность для удовлетворения необходимых требований, а также соответствовал тепловому расширению при высоких температурах, требуются более толстые эластомерные материалы, которые занимают больше места. Более толстым эластомерным материалам свойственно снижать резонансную частоту опорного модуля, из-за чего прибор подвергается высоким уровням вибрации. В большинстве случаев желательно обеспечивать динамическую изоляцию, но так, чтобы не порождать собственную резонансную частоту вблизи частот высоких уровней внешних вибраций или ударов.
Основной недостаток обычного способа применения пружин состоит в том, что пружины не обладают высокой степенью амортизации, что приводит к высоким динамическим откликам на резонансных частотах. Даже эластомеры, которые обладают гораздо более высокими амортизационными характеристиками, чем металлические пружины, имеют значительные величины «Q», из-за чего возникают повреждающие резонансные отклики, когда модуль детектора подвергается воздействию вибрации на частоте, близкой к резонансной частоте.
Ранее была рассмотрена необходимость более экономично в отношении пространства обеспечивать хорошую динамическую изоляцию и высокие уровни амортизации, что позволило бы использовать увеличенные сцинтилляционные элементы или фотоумножительные трубки за счет применения плоских или слегка оформленных удлиненных радиальных пружин. Была подтверждена их эффективность внутри модулей детектора, датчика или электроники. Однако физические ограничения и эксплуатационные соображения затрудняют, если не запрещают, в некоторых случаях, устанавливать такие пружины, полностью окружающие модули гамма-детектора или приборные блоки.
В буровых инструментах обычно обеспечивают отдельные полости давления для отдельных элементов измерительный системы для защиты приборов от высоких давлений порядка 25000 фунтов на кв. дюйм (psi) или более. Измерительные элементы в этих полостях соединены проводами для обмена сигналами. В некоторых случаях сегменты оборудования объединяют в модули, которые затем помещают в одну полость давления. Чтобы максимально использовать пространство в инструменте, необходимо объединить больше электронных элементов в одном модуле. Эффективная динамическая подвеска элементов в приборном модуле и динамическая подвеска вокруг таких модулей могут играть важную роль в повышении надежности его компонентов.
Сущность изобретения
Настоящее изобретение обеспечивает важные и существенные решения вышеописанных проблем.
Изобретение относится к электрооптическим устройствам и другой электронике и оборудованию, используемому в агрессивных средах, для регистрации и измерения ядерного излучения, например, в операциях бурения нефтяных скважин или добычи твердых минералов. В частности, настоящее изобретение предусматривает максимальное использование свободного места для установки устройства регистрации ядерного излучения или иного измерительного прибора. Описанный здесь гибкий динамический корпус обеспечивает согласование устройства с геометрией и термодинамикой полости, в которой оно должно быть установлено, что позволяет эффективно изолировать устройство от повреждающих вибраций и ударов. Установка становится более простой и надежной. Можно ожидать, что оборудование, поддерживаемое таким образом, будет иметь более долгий срок службы за счет улучшения условий эксплуатации.
Гибкий динамический корпус использует металлические пружины, имеющие прогнозируемые, повторяемые механические свойства. Такие пружины значительно тоньше, чем потребовалось бы при использовании эластомеров, чтобы обеспечить эквивалентную степень динамической изоляции. Кроме того, пружины не столь подвержены влиянию температуры, как эластомеры. При возрастании температуры до диапазона от 150 градусов Цельсия до 200 градусов Цельсия или более эластомеры расширяются, что приводит к их сдавливанию в ограниченном пространстве, где они используются, в результате чего изменяются динамические свойства. Свойства металлических пружин, применяемых в гибком динамическом корпусе, в меньшей степени зависят от изменений температуры и не ухудшаются или сохраняются со временем при температуре.
Типичная форма модуля ядерного детектора или приборного блока в буровом инструменте и некоторых других приложениях, например горных приложениях, является цилиндрической. Размещение линейных пружин по длине детектора и между детектором и полостью, в которой находится детектор, является эффективным способом решения некоторых известных проблем. Такие пружины обеспечивают требуемую ударную и вибрационную изоляцию, обеспечивают согласование между малыми изменениями формы детектора или полости и обеспечивают согласование изменений геометрии вследствие теплового расширения. Другое преимущество гибкого динамического корпуса состоит в том, что опора распределена по длине блока, уменьшая силы изгиба и сдвига при сильных ударах и вибрациях.
Эти и другие преимущества и признаки будут более понятны из нижеследующего подробного описания предпочтительных вариантов осуществления изобретения, приведенного со ссылками на прилагаемые чертежи.
Краткое описание чертежей
Фиг.1 - вид сбоку в разрезе гамма-детектора в гибком динамическом корпусе, конструкция которого отвечает варианту осуществления изобретения.
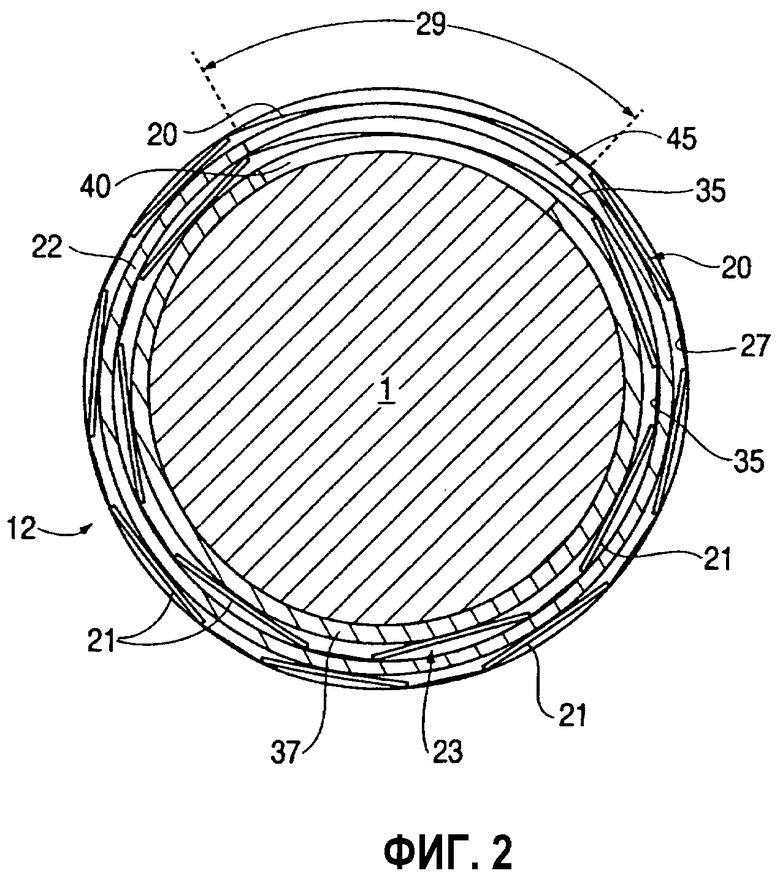
Фиг.2 - вид в разрезе по линии II-II, указанной на фиг.1.
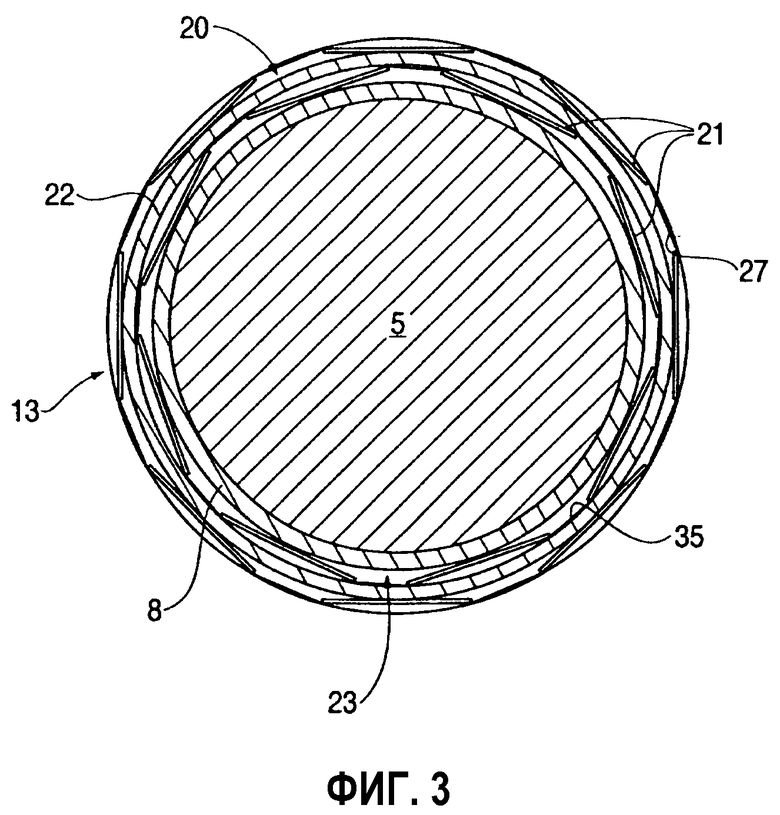
Фиг.3 - вид в разрезе по линии III-III, указанной на фиг.1.
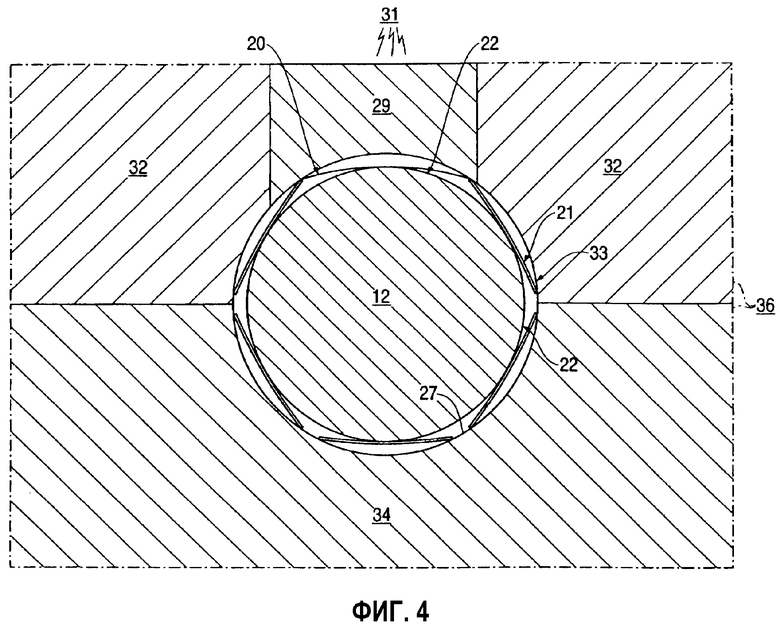
Фиг.4 - вид в разрезе сцинтилляционного модуля, показанного на фиг.2, в гибком динамическом корпусе, установленном в полости машины или инструмента.
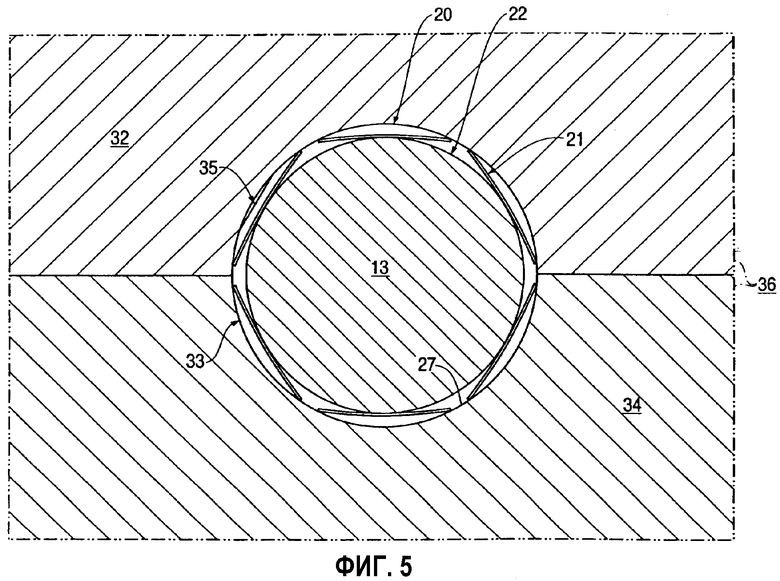
Фиг.5 - вид в разрезе электронного блока, показанного на фиг.1, в гибком динамическом корпусе, установленном в полости машины или инструмента.
Подробное описание предпочтительных вариантов осуществления
Согласно фиг.1, модуль 11 гамма-детектора содержит два основных модуля, а именно сцинтилляционный модуль 12 и электронный модуль 13. Оптическое окно 4 позволяет свету, возникающему в процессе сцинтилляции, происходящем в сцинтилляционном модуле 12, поступать в электронный модуль 13. В электронном модуле 13 формируются электрические импульсы, и он эти импульсы преобразует, измеряет, сортирует по уровням энергии, подсчитывает, анализирует, после чего выдает логические решения, поступающие по кабелю 14 операторам или на другие устройства горного оборудования. Согласно фиг.1, в состав электронного блока 13 входят известная фотоумножительная трубка 5 и известный электронный блок 6, которые защищены от воздействия окружающей среды герметичным жестким корпусом 8 электронного модуля. Традиционно, герметизация обеспечивается гайкой 10, которая прижимает сальник 9 к уплотнению вокруг выходящего кабеля 14. Вне электронного модуля 13 располагается модуль 23 внутреннего гибкого динамического корпуса, который содержит совокупность пружин 21 и внутренний гибкий корпус 35 (фиг.3). Модуль 23 внутреннего динамического корпуса расположен между герметичным жестким корпусом 8 электронного модуля и жестким корпусом 22.
В этом варианте осуществления модуль 11 гамма-детектора установлен в жестком корпусе 22, что более отчетливо проиллюстрировано на фиг.2-3. Жесткий корпус 22, в свою очередь, установлен в модуле 20 внешнего гибкого динамического корпуса, который содержит пружины 21 и внешний гибкий корпус 27. В инструменте 36 предусмотрен проем 29, показанный на фиг.2 и 4, через который гамма-излучение 31 может поступать в сцинтилляционный модуль 12. Специальные проемы 45 в жестком корпусе 22 выровнены с соответствующим проемом 29 в инструменте 36, что устраняет необходимость прохождения гамма-излучения 31 через толстые стенки жесткого корпуса 22. Пружины 21 на этом участке сцинтилляционного модуля 12 отсутствуют по той же причине, т.е. для минимизации количества металла между сцинтилляционным модулем 12 и входящим гамма-излучением 31.
Сцинтилляционный модуль 12 может содержать сцинтилляционный кристалл 1 или другое устройство, способное к сцинтилляции под действием излучения, заключенный в герметичный жесткий корпус 37 сцинтиллятора (фиг.2). Жесткий корпус 37 сцинтиллятора имеет окна 40, соответствующие проему 29. Внутри герметичного корпуса 37 сцинтилляционный кристалл 1 может быть непосредственно окружен отражающим слоем, а также эластомерным материалом, герметизирующим материалом или другими известными поддерживающими средами. Сцинтилляционный кристалл 1, а также отражающая обертка, эластомерный материал или другие поддерживающие среды герметизированы внутри жесткого корпуса 37 сцинтиллятора.
Между герметичным жестким корпусом 37 сцинтиллятора и жестким корпусом 22 находится модуль 23 внутреннего гибкого динамического корпуса. Из фиг.2 можно видеть, что участки корпусов 27 и 35, расположенные поверх проема 29, фактически контактируют, соответственно, с жестким корпусом 22 и герметичным жестким корпусом 37 сцинтиллятора, поскольку на этом участке отсутствуют пружины 21 для поддержки корпусов 27, 35.
Современный гамма-детектор, используемый в неблагоприятной окружающей среде в ограниченном пространстве, должен одновременно удовлетворять нескольким, часто противоречивым, требованиям. Для минимизирования занимаемого места и обеспечения наименьшего препятствия распространению гамма-излучения через корпуса детектора в сцинтилляционный элемент желательно, чтобы корпуса были как можно тоньше. Однако при наличии тонкого корпуса важно не прикладывать сосредоточенные или неравномерные нагрузки к внешней стороне корпуса, чтобы не деформировать корпус и не повредить сцинтилляционный элемент, или чтобы сцинтилляционный элемент не подвергался повреждению из-за ударов или вибрации. Искажение опорных систем вокруг сцинтилляционного элемента или фотоумножителя ухудшает динамическую характеристику опоры, приводя к потере производительности и/или повреждению элементов. Эти факторы становятся особенно значимыми, когда гамма-детектор установлен в модуле оболочки на горном оборудовании или в буровой инструмент. Необходимо не потерять детектор в предназначенной для него полости, поскольку внешний удар может повредить компоненты и/или внести шум в выходной сигнал. Однако, если детектор сидит плотно, то все размеры детектора и соответствующие размеры полости должны быть выполнены с высокой точностью. Тогда изменения температуры, в частности быстрые изменения, могут приводить к разному тепловому расширению, так что детектор и структура, в которой он установлен, не расширяются с одной и той же скоростью, что вызывает изменение зазоров. Все эти факторы, наряду с соответствующими соображениями установки, требуют принимать меры для механического согласования между детектором и полостью, в которой он установлен.
Как объяснялось ранее, внешнему гибкому корпусу 27 свойственно принимать форму пружин 21, пока детектор или другой цилиндрический прибор не будет установлен в цилиндрической полости 33, когда внешний гибкий корпус 27 принимает форму полости 33. При наличии мест, где диаметр полости 33 немного больше внешнего гибкого корпуса 27, между корпусом 27 и стенкой полости 33 возникают небольшие зазоры. Эти зазоры не имеют никакого значения. В результате пружины 21 принимают на себя механические изменения между модулем 11 гамма-детектора и машиной, в которой его устанавливают. После установки пружины 21 проявляют известные, заданные механические и динамические свойства. Пружины 21 сохраняют свои свойства в течение времени, к тому же их свойства остаются практически постоянными в широких температурных диапазонах, имеющих место в приложениях бурения нефтяных скважин.
Типичный способ установки модуля 11 гамма-детектора в инструменте 36 состоит в использовании конфигурации «крышка люка». Такая конфигурация показана на фиг.4 и 5. Одна часть инструмента 36, а именно его верхняя часть 32, находится в контакте с нижней частью 34. В каждой части 32, 34 выфрезерован полуцилиндр, так что вместе две части образуют цилиндрическую полость 33 в инструменте 36.
Модуль 20 внешнего гибкого динамического корпуса содержит набор линейных пружин 21, проходящих практически по всей длине модуля 11 гамма-детектора, и внешний гибкий корпус 27, окружающий пружины 21. Модуль 23 внутреннего гибкого динамического корпуса проходит вдоль сцинтилляционного модуля 12 и вдоль электронного модуля 13. Эти пружины 21 и гибкие корпуса 27 и 35 обычно выполнены из нержавеющей стали. Для изготовления гибких корпусов 27 и 35 можно использовать прокатку листа нержавеющей стали толщиной 0,0015 дюйма для получения, в совокупности, двух полных слоев. Слои скрепляют с помощью высокотемпературного адгезива, предназначенного для среды, в которой используется устройство. Пружины 21 обычно выбирают так, чтобы блок гамма-детектора в горном приложении или буровом приложении имел резонансную частоту в диапазоне 200-600 герц. Для других приложений можно выбирать другие частоты, в зависимости от частот вибраций, которым подвергается детектор. Для модуля 11 детектора диаметром в один дюйм одна конфигурация может содержать пружины 21 толщиной 0,006 дюйма и шириной 0,375 дюйма. Для изменения резонансной частоты и механических свойств модуля 20 внешнего гибкого динамического корпуса можно выбирать другие размеры. Заметим, что в некоторых неблагоприятных условиях окружающей среды необходимо, чтобы силы, приложенные пружинами 21 к модулю 11 детектора, составляли сотни фунтов. Однако когда такие большие силы распределены равномерно пружинами 21 по длине модуля 11 детектора, эти силы не вызывают повреждений даже тонкостенного модуля.
Второй главной частью модуля 11 детектора является электронный модуль 13. В состав этого модуля 13 могут входить известное светочувствительное устройство 5, например фотоумножительная трубка и связанный с ней известный электронный блок 6, например источник питания, усилители, схемы дискриминатора, микросхемы памяти, датчики и/или программируемые логические модули (фиг.1, 5). Согласно этим иллюстрациям, электроника и функции управления, которые обычно связаны с гамма-детектором, объединены в электронный блок 6, являющийся частью объединенного модуля 11 гамма-детектора. В результате получается компактный модуль 11 гамма-детектора, содержащий все функции электроники, связанные с гамма-детектором, так что отдельные опорные модули не требуются. Гибкий динамический корпус 20 динамически изолирует все эти электронные элементы от инструмента, в котором они установлены.
Предложенная группа изобретений относится к средствам для регистрации гамма-излучения и может быть использовано в буровой промышленности при гамма-каротаже. Данные изобретения направлены на повышение ударо- и виброустойчивости гамма-детектора. Предложенный гамма-детектор имеет цилиндрическую внешнюю форму и содержит модуль сцинтилляционного элемента, состоящий из сцинтилляционного элемента, герметизированного в жестком корпусе сцинтиллятора, окна, электронного модуля, включающего фотоумножительную трубку, содержащуюся в жестком корпусе электронного модуля и оптически связанную со сцинтилляционным элементом посредством окна, а также из внутренней совокупности раздельных удлиненных пружин, окружающих жесткий корпус сцинтиллятора и жесткий корпус электронного модуля, при этом каждая удлиненная пружина проходит продольно вдоль, по существу, всей длины жестких корпусов сцинтиллятора и электронного модуля, и внутреннего гибкого корпуса, окружающего внутреннюю совокупность раздельных удлиненных пружин. 3 н. и 10 з.п. ф-лы, 5 ил.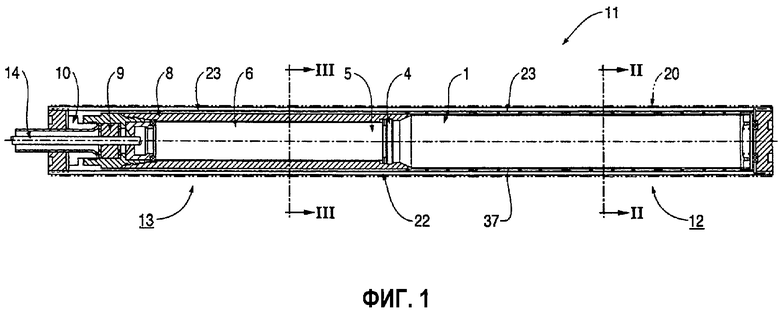
| US 5962855 А, 05.10.1999 | |||
| Термостатированный сцинтилляционный детектор | 1991 |
|
SU1789946A1 |
| US 4262964 А, 21.04.1981 | |||
| US 5070249 А, 03.12.1991 | |||
| Сцинтиблок | 1990 |
|
SU1742756A1 |
| US 5047635 А, 10.09.1991 | |||
| US 6355932 B1, 12.03.2002. | |||

