Предлагаемое изобретение относится к преобразовательной технике и может быть использовано в преобразовательных источниках питания для различных электротехнологических установок.
В ряде электротехнологических установок и процессов для повышения эффективности их работы целесообразно применение двухчастотного электромагнитного поля, обеспечивающего двухчастотную систему токов, например: при индукционном нагреве зубчатых колес, когда индукционный нагрев основной массы колеса производится на низкой частоте, а поверхность зубьев закаливается на высокой частоте; при плавке металлов, когда плавка металла производится на высокой частоте, а его перемешивание - на низкой частоте; в электромагнитном насосе для перекачивания жидкого металла, когда перекачивание металла осуществляется на низкой частоте, а его подогрев для предотвращения затвердевания - на высокой частоте.
Для генерирования двухчастотного электромагнитного поля, а следовательно, и двухчастотной системы токов известен автономный полумостовой инвертор и способ управления работой автономного полумостового инвертора. Упомянутый инвертор содержит полумостовую схему из управляемых ключей, шунтированных диодами, фильтровый конденсатор и разделительные конденсаторы, подключенные параллельно к источнику постоянного напряжения. Нагрузка инвертора выполнена в виде высокочастотного параллельного резонансного колебательного LC-контура. С общей точкой разделительных конденсаторов и последовательно с LC-контуром соединен низкочастотный дроссель. Таким образом, в инверторе имеется последовательный низкочастотный резонансный колебательный LC-контур и параллельный высокочастотный резонансный колебательный LC-контур. В результате этого посредством управления ключами полумоста формируют высокочастотные колебания в виде синусоиды, средняя линия которой изменяется по синусоиде низкой частоты, т.е. формируют двухчастотное электромагнитное поле, а следовательно, и двухчастотную систему токов (Патент на изобретение №2231906).
Известно также устройство для индукционного нагрева и способ управления устройством для индукционного нагрева, в котором упомянутый выше автономный инвертор может быть включен по m-фазной системе для питания m-фазной нагрузки, при этом в каждой фазе или обмотке нагрузки формируются токи высокой и низкой частоты, при этом каждый инвертор подключен к своему источнику постоянного напряжения (Патент на изобретение №2231904).
Известно также устройство для индукционного нагрева и способ управления устройством для индукционного нагрева, в котором упомянутые выше автономные инверторы также могут быть включены по m-фазной системе для питания m-фазной нагрузки, при этом все инверторы подключены к общему источнику постоянного напряжения, а в каждой фазе формируются токи высокой и низкой частоты (Патент на изобретение №2231905).
Все упомянутые устройства позволяют генерировать двухчастотные электромагнитные поля, а следовательно, и двухчастотные системы токов в широком диапазоне изменения частоты как низкочастотной, так и высокочастотной составляющих электромагнитного поля, при этом предельная частота высокочастотной составляющей электромагнитного поля определяется только динамическими параметрами управляемых ключей, используемых в автономном инверторе, прежде всего временем включения и выключения управляемых ключей, а также допустимыми скоростями изменения токов и напряжений этих ключей.
Во всех упомянутых аналогах в общем случае с широким диапазоном изменения частот низкочастотной и высокочастотной составляющих электромагнитного поля оправдано применение низкочастотного и высокочастотного колебательных резонансных LC-контуров, оправдано применение инвертора для получения двухчастотного электромагнитного поля при специальном управлении инвертором и выпрямителя для получения постоянного напряжения, так как все это в совокупности позволяет достичь заявленного в упомянутых аналогах технического результата: формирование в нагрузке инвертора сигнала, содержащего одновременно высокочастотный и низкочастотный токи.
Однако на практике имеется такой частный случай, когда частота низкочастотного сигнала может составлять 50 или 60 Гц, т.е. частоту напряжения промышленной сети. Этот частный случай имеет место при больших массах нагреваемого, расплавляемого или перекачиваемого металла. В упомянутом частном случае начинают проявляться недостатки рассмотренных аналогов, а именно наличие выпрямителя и инвертора, что приводит к ухудшению массогабаритных показателей устройств-аналогов, двойное преобразование параметров электрической энергии, сначала выпрямление, затем инвертирование, что приводит к снижению к.п.д. устройств-аналогов и, наконец, наличие двух резонансных колебательных LC- контуров - последовательного и параллельного - в инверторе, что также приводит к ухудшению массогабаритных показателей устройств-аналогов. Наиболее близким к предлагаемому регулятору-преобразователю переменно-переменного тока является принятый в качестве прототипа трехфазный тиристорный регулятор переменного напряжения, который содержит 3 однофазные цепи, соединенные по схеме «звезда» и подключенные к трехфазной сети переменного напряжения, при этом каждая однофазная цепь состоит из последовательно соединенных встречно-параллельно включенных двух тиристоров и активно-индуктивной нагрузки (Приложение 1: Бурков А.Т. Электронная техника и преобразователи: Учеб. для вузов ж.-д. трансп. - М.: Транспорт, 2001. - 464 с.: стр.440, рис.10.2, на котором изображен однофазный тиристорный регулятор с типичной активно-индуктивной RL-нагрузкой и стр.442, рис.10.4,а, на котором изображен трехфазный тиристорный регулятор, в котором для упрощения пояснения принципа его работы активно-индуктивная RL-нагрузка заменена на активную или резистивную R-нагрузку).
В указанном прототипе, как и в предлагаемом регуляторе-преобразователе переменно-переменного тока, нет выпрямителя и инвертора, однако он позволяет генерировать только напряжение и ток одной - низкой частоты, равной частоте питающей промышленной сети, например 50 или 60 Гц. Таким образом, в результате патентного поиска установлен аналог - автономный инвертор, который в упомянутом выше частном случае не позволяет без выпрямителя и низкочастотного колебательного LC-контура, ухудшающих массогабаритные показатели инвертора, достичь заявленного технического результата, заключающегося в возможности независимого формирования в активно-индуктивной нагрузке одновременно токов высокой и низкой частоты без низкочастотного колебательного LC-контура, и выбран прототип, который также не позволяет достичь вышеупомянутого заявленного технического результата, заключающегося в возможности независимого формирования в активно-индуктивной нагрузке одновременно токов высокой и низкой частоты.
Известен способ управления автономного инвертора (Патент на изобретение №2231906), который обеспечивает управление автономным инвертором путем подачи управляющих импульсов на противофазные вентили-ключи и получение высокочастотного тока активно-индуктивной нагрузки, но только при постоянном напряжении питания.
Наиболее близким к заявленному является способ управления трехфазного тиристорного регулятора переменного напряжения путем подачи импульсов управления на встречно-параллельно включенные тиристоры в каждой фазе и путем изменения угла сдвига α между фазой напряжения на тиристоре и импульсом управления (Приложение 2: Электрические и электронные аппараты. Учебник для вузов/Под ред. Ю.К.Розанова. - М.: Энергоатомиздат, 1998. - 752 с.: стр.631, рис.12.4 и 12.5). В указанном прототипе предусмотрено регулирование m-фазных тока и напряжения только низкой частоты.
Таким образом, выявленные в результате патентного поиска аналог и прототип заявленного способа управления преобразователем в упомянутом частном случае не обеспечивают достижения заявленного технического результата, заключающегося в возможности независимого формирования в активно-индуктивной нагрузке сигнала, содержащего одновременно высокочастотный и низкочастотный токи без низкочастотного колебательного LC-контура.
Предлагаемое изобретение - m-фазный регулятор-преобразователь переменно-переменного тока, решает задачу создания преобразователя, осуществление которого в упомянутом частном случае без выпрямителя и низкочастотного резонансного колебательного LC-контура позволяет достичь технического результата, заключающегося в возможности формирования в активно-индуктивной нагрузке m-фазного регулятора-преобразователя переменно-переменного тока сигнала, содержащего одновременно высокочастотный и низкочастотный токи без низкочастотного колебательного LC-контура.
Сущность изобретения заключается в том, что в m-фазный регулятор переменного напряжения, где m может принимать значения или 1, или 3, или 6, содержащий m однофазных цепей, которые соединены по m-фазной схеме, например, «звезда» и подсоединены к m-фазной питающей низкочастотной сети переменного тока, при этом каждая однофазная цепь содержит одно плечо с двухсторонней проводимостью из двух встречно-параллельно соединенных управляемых ключей и однофазную активно-индуктивную нагрузку, при этом в каждой однофазной цепи первый вывод плеча с двухсторонней проводимостью из встречно-параллельно соединенных управляемых ключей соединен с одним из фазных выводов m-фазной питающей низкочастотной сети переменного тока, а второй вывод упомянутого плеча соединен с первым выводом активно-индуктивной однофазной нагрузки, второй вывод которой соединен с вторыми выводами других однофазных активно-индуктивных нагрузок, введены m компенсирующих высокочастотных конденсаторов, в результате чего m-фазный регулятор переменного напряжения превращается в m-фазный регулятор-преобразователь переменно-переменного тока, при этом в каждой однофазной цепи активно-индуктивная нагрузка и компенсирующий высокочастотный конденсатор соединены с образованием высокочастотного параллельного резонансного колебательного LC-контура.
Кроме того, в каждую однофазную цепь m-фазного регулятора-преобразователя переменно-переменного тока могут быть введены по два диода, каждый из которых соединен согласно последовательно с одним управляемым ключом, при этом рассмотрены другие возможные варианты исполнения плечей с двухсторонней проводимостью, состоящих из управляемых ключей и диодов, в том числе выполнение плеча с двухсторонней проводимостью из двух встречно-последовательно включенных управляемых ключей и двух встречно-последовательно включенных диодов, а также из четырех диодов и управляемого ключа. Для управления управляемыми ключами m-фазный регулятор-преобразователь переменно-переменного тока снабжен системой управления и регулирования СУР.
Кроме того, в каждую однофазную цепь m-фазного регулятора-преобразователя переменно-переменного тока могут быть введены дроссель и низкочастотный конденсатор, при этом в каждой однофазной цепи дроссели могут быть включены между первыми выводами плечей с двухсторонней проводимостью, состоящих из управляемых ключей, и фазными выводами m-фазной питающей низкочастотной сети переменного тока, а конденсаторы могут быть соединены по схеме m-фазного многоугольника и вершинами углов подсоединены к фазным выводам m-фазной питающей низкочастотной сети переменного тока.
Заявленный технический результат достигается следующим образом. Благодаря тому, что каждая однофазная активно-индуктивная нагрузка через встречно-параллельно соединенные управляемые ключи подключена к фазному напряжению m-фазной питающей низкочастотной сети переменного тока, m-фазный низкочастотный ток активно-индуктивной нагрузки с частотой питающей сети переменного тока формируется путем отпирания управляемых ключей в течение всего интервала времени существования прямого положительного напряжения на управляемых ключах в каждой однофазной цепи. Для формирования высокочастотного тока в активно-индуктивной нагрузке введены m высокочастотных компенсирующих конденсаторов, каждый из которых в каждой однофазной цепи соединен параллельно с однофазной активно-индуктивной нагрузкой с образованием высокочастотного параллельного резонансного колебательного LC-контура. Отпирание и запирание управляемых ключей в плечах с двухсторонней проводимостью с частотой следования, равной резонансной частоте упомянутого высокочастотного LC-контура, обеспечивает формирование высокочастотного тока в активно-индуктивной нагрузке.
Таким образом, заявленный m-фазный регулятор-преобразователь переменно-переменного тока при осуществлении обеспечивает достижение заявленного технического результата, заключающегося в возможности формирования в нагрузке m-фазного регулятора-преобразователя переменно-переменного тока сигнала, содержащего одновременно высокочастотный и низкочастотный токи без низкочастотного колебательного LC-контура. Различное возможное исполнение плечей с двухсторонней проводимостью из управляемых ключей и диодов не влияет на достижение заявленного технического результата.
Поскольку заявленный m-фазный регулятор-преобразователь переменно-переменного тока подключается непосредственно к m-фазной промышленной сети переменного тока, индуктивный характер нагрузки, которая компенсируется только по высокой частоте, вызывает отставание первой гармоники m-фазного тока, потребляемого из m-фазной питающей сети переменного тока по отношению к напряжению упомянутой сети переменного тока, а формирование высокочастотного тока активно-индуктивной нагрузки путем отпирания и запирания управляемых ключей с высокой частотой вызывает появление высших гармоник в токе, потребляемом из m-фазной питающей сети переменного тока.
Для снижения отставания фазы m-фазного низкочастотного потребляемого из низкочастотной питающей сети тока от фазы напряжения этой сети, а также для уменьшения уровня высших гармоник в потребляемом из сети питания токе возможно применение фильтрокомпенсирующих устройств, состоящих из дросселей, последовательно соединенных с плечами с двухсторонней проводимостью из встречно-параллельно соединенных управляемых ключей, и конденсаторов, подсоединяемых параллельно фазным выводам m-фазной питающей сети переменного тока.
Сущность изобретения способ управления работой заявленного m-фазного регулятора-преобразователя переменно-переменного тока, реализующего способ управления работой заявленного m-фазного регулятора-преобразователя переменно-переменного тока, заключается в том, что в соответствии со способом регулятор-преобразователь переменно-переменного тока выполняют по m-фазной схеме, при этом в каждой однофазной цепи вводят высокочастотный компенсирующий конденсатор, который подсоединяют параллельно однофазной активно-индуктивной нагрузке, и тем самым образуют высокочастотный параллельный резонансный колебательный LC-контур, при этом значение емкости упомянутого высокочастотного компенсирующего конденсатора выбирают таким, чтобы резонансная частота упомянутого высокочастотного колебательного LC-контура была преимущественно в 5 и более раз выше частоты m-фазной низкочастотной питающей сети переменного тока, при этом путем подачи импульсов управления на встречно-параллельно включенные управляемые ключи плечей с двухсторонней проводимостью в активно-индуктивной нагрузке одновременно формируют низкочастотный ток с частотой, равной частоте питающей m-фазной сети переменного тока, и высокочастотный ток упомянутой активно-индуктивной нагрузки с частотой, равной резонансной частоте высокочастотного параллельного резонансного колебательного LC-контура. При этом коэффициент скважности высокочастотных управляющих импульсов, а следовательно, и соотношение интервалов открытого и закрытого состояний управляемых ключей выбирают таким, чтобы обеспечить максимально возможную активную мощность в активно-индуктивной нагрузке от воздействия высокочастотного тока.
Заявленный технический результат достигается следующим образом. В заявленном способе управления m-фазным регулятором-преобразователем переменно-переменного тока управление каждого управляемого ключа каждого плеча с двухсторонней проводимостью осуществляется путем формирования пачек высокочастотных импульсов управления, при этом частота формирования упомянутых пачек импульсов управления равна частоте низкочастотной m-фазной питающей сети переменного тока, что обеспечивает низкочастотный ток в активно-индуктивной нагрузке, а частота следования высокочастотных импульсов в упомянутой пачке импульсов управления равна резонансной частоте высокочастотного параллельного резонансного колебательного LC-контура, что обеспечивает высокочастотный ток в активно-индуктивной нагрузке, при этом при изменении параметров активно-индуктивной нагрузки частоту высокочастотного тока и скважность высокочастотных импульсов поддерживают на уровне, который обеспечивает максимально возможную активную мощность в активно-индуктивной нагрузке от воздействия высокочастотного тока. Для этого непрерывно контролируют активную мощность активно-индуктивной нагрузки от воздействия высокочастотного тока и путем варьирования частоты следования высокочастотных импульсов управления и их коэффициента скважности поддерживают упомянутую активную мощность на максимально возможном уровне.
Таким образом, заявленный m-фазный регулятор-преобразователь переменно-переменного тока и заявленный способ управления работой m-фазного регулятора-преобразователя переменно-переменного тока при осуществлении обеспечивают заявленный технический результат, т.е. обеспечивают возможность формирования в активно-индуктивной нагрузке m-фазного регулятора-преобразователя переменно-переменного тока одновременно высокочастотного и низкочастотного токов без низкочастотного колебательного LC-контура при максимально возможной активной мощности в активно-индуктивной нагрузке от воздействия высокочастотного тока.
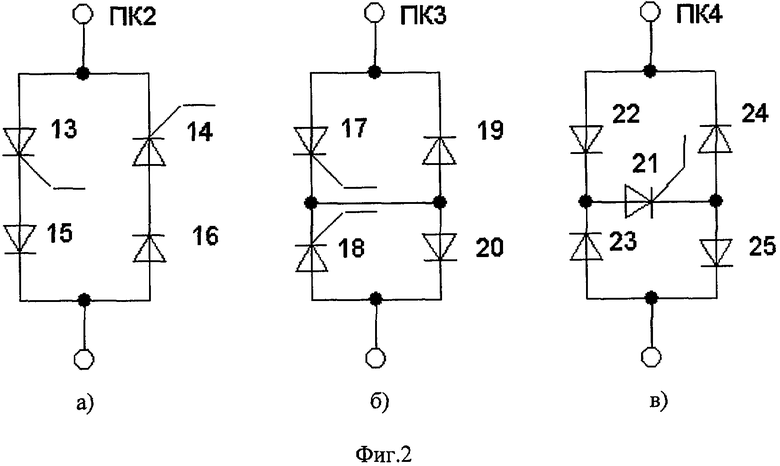
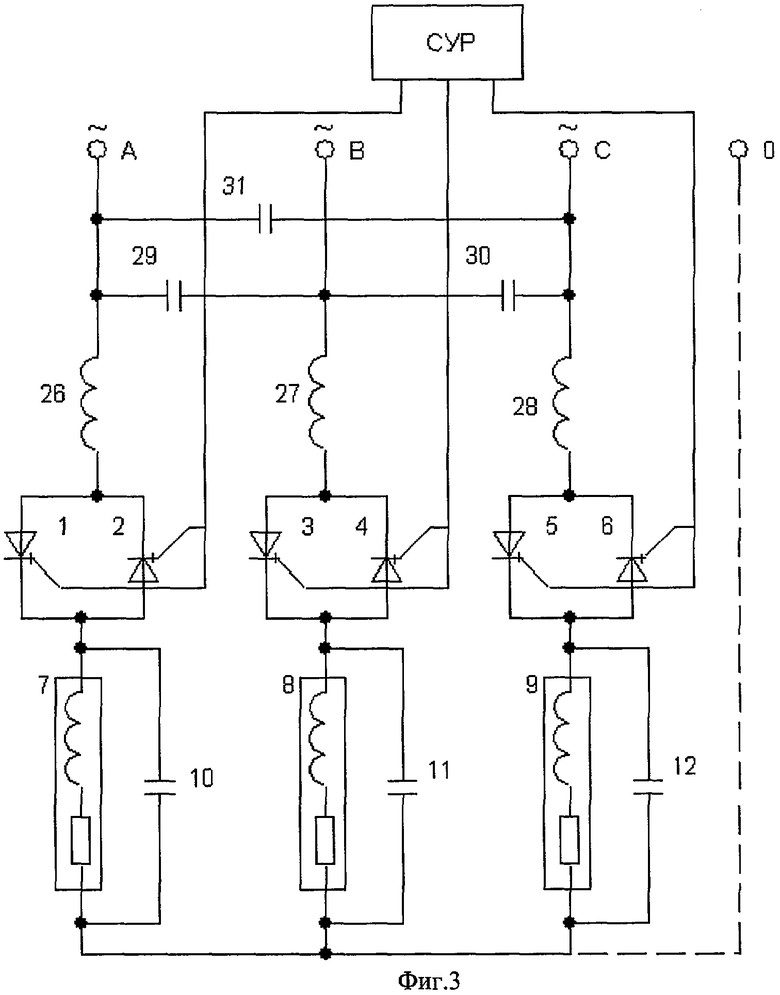
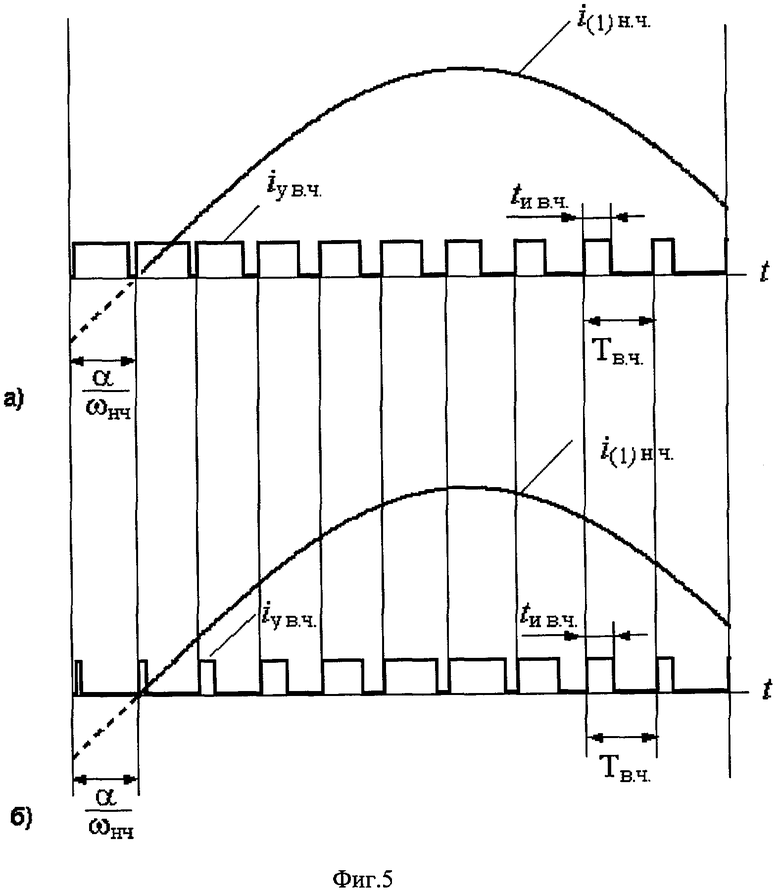
На фиг.1 изображена электрическая схема m-фазного регулятора-преобразователя переменно-переменного тока с плечами с двухсторонней проводимостью из управляемых ключей типа ПК1; на фиг.2 изображены возможные варианты исполнения плечей с двухсторонней проводимостью из управляемых ключей и диодов типа ПК2, ПКЗ и ПК4; на фиг.3 изображена электрическая схема возможного варианта m-фазного регулятора-преобразователя переменно-переменного тока с дополнительными дросселями и низкочастотными конденсаторами; на фиг.4 изображены временные диаграммы, поясняющие работу системы управления и регулирования СУР, предложенного m-фазного регулятора-преобразователя переменно-переменного тока; на фиг.5 изображены временные диаграммы, поясняющие дополнительные возможные способы управления и регулирования предложенного m-фазного регулятора-преобразователя переменно-переменного тока.
В примере выполнения устройства в качестве управляемых ключей использованы двухоперационные тиристоры, кроме того, принято m=3. М-фазный регулятор-преобразователь переменно-переменного тока, приведенный на фиг.1, содержит 3 однофазных цепи, соединенных по схеме «звезда» и подсоединенных к трехфазной питающей низкочастотной сети А, В, С переменного тока, при этом каждая однофазная цепь содержит одно плечо с двухсторонней проводимостью типа ПК1, состоящее из двух встречно-параллельно соединенных двухоперационных тиристоров: 1-2 в первой цепи, 3-4 - во второй и 5-6 - в третьей, а также активно-индуктивные нагрузки: 7 в первой цепи, 8 - во второй и 9 - в третьей, и высокочастотный конденсатор: 10 в первой цепи, 11 - во второй и 12 - в третьей, при этом активно-индуктивные нагрузки 7,8 и 9 в каждой однофазной цепи и высокочастотные конденсаторы 10, 11 и 12 соединены соответственно параллельно с образованием высокочастотных параллельных резонансных колебательных LC-контуров: 7-10 в первой цепи, 8-11 во второй цепи и 9-12 - в третьей, при этом первый вывод плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 1-2 в первой однофазной цепи подсоединен к фазному выводу А питающей трехфазной низкочастотной сети переменного тока, первый вывод плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 3-4 во второй однофазной цепи подсоединен к фазному выводу В упомянутой трехфазной сети, первый вывод плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 5-6 в третьей однофазной цепи подсоединен к фазному выводу С упомянутой трехфазной сети, второй вывод плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 1-2 в первой однофазной цепи соединен с первым выводом высокочастотного параллельного резонансного колебательного LC-контура 7-10, второй вывод плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 3-4 во второй однофазной цепи соединен с первым выводом высокочастотного параллельного резонансного колебательного LC-контура 8-11, второй вывод плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 5-6 в третьей однофазной цепи соединен с первым выводом высокочастотного параллельного резонансного колебательного LC-контура 9-12, вторые выводы упомянутых высокочастотных параллельных резонансных колебательных LC-контуров 7-10, 8-11 и 9-12 соединены в общую точку, которая может быть соединена с нулевым выводом трехфазной низкочастотной питающей сети переменного тока, если последний имеется.
На фиг.2,а приведен возможный вариант плеча с двухсторонней проводимостью типа ПК2 из встречно-параллельно соединенных тиристоров 13-14, в котором согласно-последовательно с каждым тиристором соединены диоды 15-16, что позволяет увеличить обратную блокирующую способность двухоперационного тиристора, которая, как правило, ниже прямой его блокирующей способности. На фиг.2,б приведен возможный вариант плеча с двухсторонней проводимостью типа ПКЗ, в котором двухоперационные тиристоры 17-18 включены встречно последовательно, при этом каждый из тиристоров 17-18 зашунтирован в обратном направлении диодами 19-20. На фиг.2,в приведен возможный вариант плеча с двухсторонней проводимостью типа ПК4, в котором двухоперационный тиристор 21 включен в диагональ постоянного тока диодного моста, состоящего из четырех диодов 22, 23, 24, 25, диагональ переменного тока которого включается в цепь переменного тока.
На фиг.3 изображена электрическая схема возможного варианта m-фазного регулятора-преобразователя переменно-переменного тока, в котором в каждой однофазной цепи введены дроссели: соответственно 26 в первой однофазной цепи, 27- во второй и 28- в третьей, а также введены три низкочастотных конденсатора 29, 30, 31, при этом дроссель 26 в первой однофазной цепи включен между первым выводом плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 1-2 и фазным выводом А трехфазной питающей низкочастотной сети переменного тока, дроссель 27 во второй однофазной цепи включен между первым выводом плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 3-4 и фазным выводом В упомянутой трехфазной питающей сети, дроссель 28 в третьей однофазной цепи включен между первым выводом плеча с двухсторонней проводимостью из встречно-параллельно соединенных тиристоров 5-6 и фазным выводом С упомянутой трехфазной питающей сети, а низкочастотные конденсаторы 29, 30 и 31 соединены по схеме «треугольник» и вершинами углов подсоединены к фазным выводам А, В, С трехфазной низкочастотной питающей сети переменного тока.
Работу заявленного m-фазного регулятора-преобразователя переменно-переменного тока и выполнение заявленного способа управления упомянутым m-фазным регулятором-преобразователем переменно-переменного тока осуществляют следующим образом.
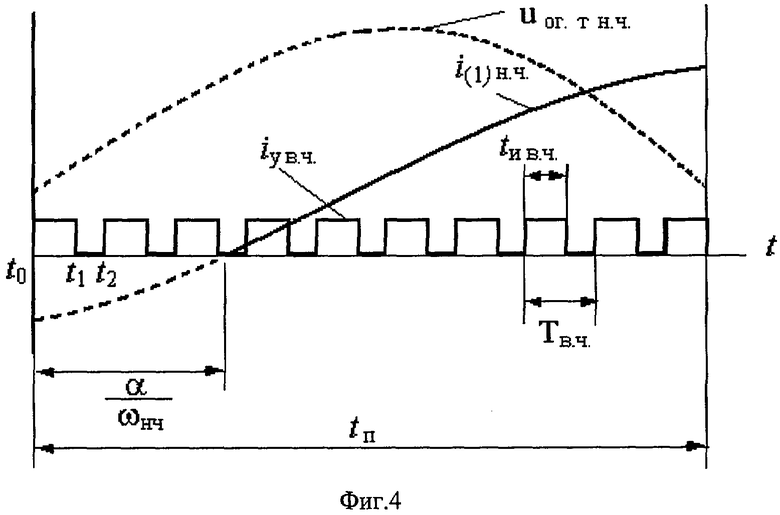
Для каждого из запираемых тиристоров 1, 2, 3, 4, 5 и 6 (фиг.1) формируют пачки высокочастотных импульсов, которые подают на каждый упомянутый тиристор в течение времени приложения к этому тиристору прямого положительного напряжения, при этом частоту формирования упомянутых пачек импульсов fнч задают равной частоте низкочастотной m-фазной питающей сети переменного тока, длительность этих пачек tп задают равной времени приложения положительного низкочастотного напряжения к соответствующим тиристорам. На фиг.4 в качестве примера для одного из тиристоров приведены временные диаграммы огибающей u ог т нч положительного переменного низкочастотного напряжения на тиристоре, первой гармоники i(1)нч низкочастотного потребляемого из питающей сети тока и пачки высокочастотных управляющих импульсов с длительностью этой пачки tп, с частотой следования высокочастотных управляющих импульсов fвч=1/Твч, где Твч - период следования высокочастотных управляющих импульсов, и коэффициентом скважности высокочастотных управляющих импульсов Кскв=tи вч/Твч, где tи вч - длительность отпирающего высокочастотного импульса управления, при этом запирающий высокочастотный импульс управления tзап вч=Твч-tи вч для упрощения на фиг.4 не показан.
Рассмотрим работу регулятора-преобразователя переменно-переменного тока при наличии нулевого провода. В этом случае все однофазные цепи могут работать независимо друг от друга под воздействием однофазного напряжения. Например, при появлении низкочастотного прямого положительного напряжения от фазы А на запираемом тиристоре 1 в момент времени tо и поступлении в этот же момент времени управляющего импульса iу вч для предельного случая α/ωнч=0 по контуру А-1<7 10>0 - А начинает протекать высокочастотный ток, частота которого определяется резонансной частотой колебательного LC-контура 7-10, при этом происходит запасание электромагнитной энергии в высокочастотном компенсирующем конденсаторе 10, затем запираемый тиристор 1 в момент времени t1 запирается и высокочастотный ток с той же частотой протекает по контуру 10-7-10, при этом электромагнитная энергия, запасенная в высокочастотном компенсирующем конденсаторе 10, поступает в активно-индуктивную нагрузку 7. При появлении очередного управляющего высокочастотного импульса в момент времени t2 электромагнитный процесс повторяется, но он будет происходить при более высоком фазном напряжении. После прекращения прямого положительного напряжения на тиристоре 1 он не отпирается и ток по нему не протекает. При смене полярности напряжения фазы А питающей сети переменного тока и появлении прямого положительного напряжения на тиристоре 2, последний при поступлении на его входные выводы пачки управляющих высокочастотных импульсов также будет открываться и высокочастотный ток будет по аналогии с рассмотренным протекать либо по контуру 0<7 10>2-А-0 при открытом тиристоре 2, либо по контуру 10-7-10 при закрытом упомянутом тиристоре. При открытом тиристоре 1 при прямом положительном напряжении на нем наряду с высокочастотным током формируется одна, например, положительная полуволна низкочастотного тока, а при открытом тиристоре 2 при прямом положительном напряжении на нем - вторая, например, отрицательная полуволна низкочастотного тока активно-индуктивной нагрузки. При наличии нулевого провода однофазные цепи, подсоединенные к фазным выводам В и С, работают аналогично.
При запуске регулятора-преобразователя переменно-переменного тока в качестве начальной частоты следования высокочастотных импульсов задается частота, равная резонансной частоте высокочастотного параллельного резонансного колебательного LC-контура, а коэффициент скважности упомянутых импульсов задается равным 0,5. Однако максимально возможная активная мощность в активно-индуктивной нагрузке от воздействия высокочастотного тока может иметь место при некотором отклонении упомянутых частоты следования и скважности высокочастотных импульсов от принятых начальных значений. Поэтому при управлении регулятором-преобразователем переменно-переменного тока непрерывно измеряют и запоминают на каждом полупериоде напряжения одной из фаз m-фазной питающей низкочастотной сети переменного тока мгновенные значения тока и напряжения высокой частоты в активно-индуктивной нагрузке на каждом периоде высокой частоты, затем по полученным экспериментальным данным путем графоаналитического интегрирования определяют значения активных мощностей на каждом периоде высокой частоты, затем упомянутые активные мощности на полупериоде низкой частоты суммируют и находят среднее значение активной мощности на упомянутом полупериоде низкой частоты, затем запоминают полученное значение упомянутой активной мощности и формируют поочередно сигнал на изменение частоты следования или скважности высокочастотных управляющих импульсов, затем снова определяют среднее значение активной мощности на следующем полупериоде низкой частоты, сравнивают его с предыдущим значением и так далее до тех пор, пока не будет достигнута максимально возможная активная мощность в активно-индуктивной нагрузке от воздействия высокочастотного тока. В связи с тем, что определение активной мощности на каждом высокочастотном периоде может осуществляться только графоаналитическим интегрированием, необходимо в алгоритме управления предусматривать по крайней мере один полупериод низкой частоты для выполнения необходимых вычислений. Поэтому команда на изменение частоты следования высокочастотных управляющих импульсов или коэффициента скважности этих импульсов формируется со сдвигом в сторону запаздывания по крайней мере на один полупериод низкой частоты. Так, если на 1-м полупериоде низкой частоты измеряют и запоминают высокочастотные токи и напряжение в активно-индуктивной нагрузке, то определение средней активной мощности по полученным экспериментальным данным производят на 2-м полупериоде низкой частоты, а команду на изменение частоты следования высокочастотных импульсов или коэффициента скважности этих импульсов формируют только на 3-м полупериоде низкой частоты. Для уточнения определения средней активной мощности на полупериоде низкой частоты, что может быть достигнуто за счет уменьшения шага графоаналатического интегрирования, указанные вычисления можно выполнять за два и более полупериодов низкой частоты. Чем больше масса нагреваемого металла и больше время его нагрева, тем больший интервал времени может быть предусмотрен для вычисления средней активной мощности на очередном полупериоде низкой частоты без заметного снижения точности регулирования.
При работе регулятора-преобразователя переменно-переменного тока без нулевого провода одновременное формирование низкочастотного и высокочастотного тока в активно-индуктивной нагрузке возможно только при одновременной работе двух тиристоров, включенных в разные однофазные цепи. В этом случае пачки высокочастотных управляющих импульсов необходимо подавать всегда на два тиристора, включенные в разных однофазных цепях с соответствующим сдвигом во времени. Так для тиристоров регулятора-преобразователя переменно-переменного тока, изображенного на фиг.1, пачки высокочастотных импульсов управления должны подаваться на следующие тиристоры в следующем порядке со сдвигом через 60° электрических: 4,1-1,6-6,3-3,2-2,5-5,4-4,1 и так далее. В этом случае электромагнитные процессы будут аналогичны рассмотренным, но ток будет протекать одновременно по двум однофазным цепям. Так при подаче отпирающих импульсов на тиристоры 1,6 ток будет протекать по контуру А-1<7 10><9 12>6-С-А, при этом будут запасать энергию компенсирующие конденсаторы 10 и 12, а после запирания тиристоров 1,6 упомянутые конденсаторы 10 и 12 будут отдавать запасенную энергию активно-индуктивным нагрузкам соответственно 7 и 9.
При работе регулятора-преобразователя переменно-переменного тока в схеме с нулевым проводом для уменьшения сдвига α/ωнч первой гармоники потребляемого из питающей сети низкочастотного переменного тока по отношению к напряжению этой сети может быть применена модуляция коэффициента скважности Кскв в течение времени приложения прямого положительного напряжения на тиристорах, например, путем увеличения упомянутого коэффициента скважности по линейному закону при движении к началу интервала времени приложения прямого положительного напряжения на тиристорах, как это показано на временных диаграммах на фиг.5,а, или по синусоидальному закону, как это показано на фиг.5,б.
В рассмотренных режимах работы формирование токов нагрузки осуществляется с помощью управления плеч с двухсторонней проводимостью из управляемых ключей-тиристоров типа ПК1, т.е. плеч 1-2, 3-4, 5-6. Возможная замена плеч типа ПК1 на плечи с двухсторонней проводимостью типа ПК2, ПК3 и ПК4 ничего не меняет ни в формировании трехфазного низкочастотного и высокочастотного токов нагрузки, ни в работе системы управления и регулирования СУР. Исключение составляет возможный вариант плеча с двухсторонней проводимостью типа ПК4, когда упомянутая система СУР должна обеспечивать отпирание не противофазных встречно включенных тиристоров 13-14 или 17-19 (фиг.2,а и 2,б) при формировании положительной и отрицательной полуволн низкочастотного тока нагрузки, а одного тиристора 21 (фиг.2,в), который обеспечивает формирование, например, через диоды 22-25 положительной полуволны низкочастотного тока активно-индуктивной нагрузки, а через диоды 23-24 - отрицательной полуволны упомянутого тока активно-индуктивной нагрузки.
Возможное введение дополнительных низкочастотных конденсаторов 29, 30 и 31 позволяет уменьшить интервал времени α/ωнч сдвига между первой гармоникой трехфазного низкочастотного тока нагрузки, потребляемого из трехфазной низкочастотной питающей сети и прямым положительным напряжением на тиристоре, т.к. путем регулирования системой СУР этот интервал времени не удается свести до нуля. Возможное введение дополнительных дросселей 26, 27, 28 позволяет уменьшить амплитуду высокочастотных токов нагрузки, потребляемых из трехфазной низкочастотной питающей сети переменного тока, т.к. эти высокочастотные токи при наличии конденсаторов 29, 30, 31 и дросселей 26, 27, 28 замыкаются по внутренним по отношению к трехфазной низкочастотной питающей сети переменного тока контурам, например, таким, как: 7,10- 1,2- 26- 29- 27 -3,4 -8, 11-7,10, при этом чем выше частота высокочастотного тока или номер высшей гармоники этого тока, тем больше сопротивление ωLдр дросселей, например 26 и 27 и больше напряжение от этих гармоник тока на этих дросселях, одновременно тем меньше сопротивление 1/ωС низкочастотного конденсатора, например, 29 и меньше напряжение от этих гармоник тока на этом конденсаторе, что и приводит к уменьшению потребляемых из низкочастотной питающей сети высокочастотных токов и высших гармоник этих токов.
Необходимо отметить, что нагрузка трехфазного регулятора-преобразователя переменно-переменного тока может быть включена по схеме «треугольник» (или в общем случае по схеме многоугольник), а плечи с двухсторонней проводимостью из управляемых ключей могут быть включены в отдельные однофазные цепи, как это показано на фиг.1 и 3, а также внутри «треугольника» (или многоугольника). Кроме того, необходимо отметить, что для защиты от перенапряжений управляемых ключей, в данном случае двухоперационных тиристоров и диодов, могут быть использованы защитные шунтирующие RC-цепи или варисторы, которые для упрощения не показаны на фиг.1, 2, 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОФАЗНОЕ ПРЕОБРАЗОВАТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕННО-ПЕРЕМЕННОГО ТОКА ДЛЯ ИНДУКЦИОННОГО НАГРЕВА | 2006 |
|
RU2309558C1 |
| СХЕМА ПОДКЛЮЧЕНИЯ МНОГОФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ К ИСТОЧНИКУ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2406217C1 |
| ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО ТРЕХФАЗНОГО НАПРЯЖЕНИЯ В ПЕРЕМЕННОЕ ОДНОФАЗНОЕ ТРОЙНОЙ ЧАСТОТЫ | 1996 |
|
RU2121210C1 |
| УСТРОЙСТВО ДЛЯ ИНДУКЦИОННОГО НАГРЕВА И СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА ДЛЯ ИНДУКЦИОННОГО НАГРЕВА | 2005 |
|
RU2312450C2 |
| Непосредственный преобразователь м-фазного напряжения одной частоты в однофазное м-кратной частоты | 1987 |
|
SU1524145A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ТРЕХФАЗНОГО ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2006164C1 |
| Преобразователь частоты с квази-ОдНОпОлОСНОй пОдуляциЕй | 1979 |
|
SU843134A1 |
| УСТРОЙСТВО ДЛЯ ИНДУКЦИОННОГО НАГРЕВА | 2006 |
|
RU2309557C1 |
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА РЕГУЛИРОВАНИЯ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2009 |
|
RU2408129C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТРЕХФАЗНОГО НАПРЯЖЕНИЯ | 1994 |
|
RU2071632C1 |
Предлагаемое изобретение относится к преобразовательной технике и может быть использовано в преобразовательных источниках питания различных электротехнологических установок. Техническим результатом является формирование в активно-индуктивной нагрузке m-фазного регулятора-преобразователя переменно-переменного тока сигнала, содержащего одновременно высокочастотный и низкочастотный токи. М-фазный регулятор-преобразователь переменно-переменного тока содержит m однофазных цепей, которые соединены по m-фазной схеме, например, «звезда» и подсоединены к m-фазной питающей низкочастотной сети переменного тока, при этом каждая однофазная цепь содержит одно плечо с двухсторонней проводимостью из двух встречно-параллельно соединенных управляемых ключей и однофазную активно-индуктивную нагрузку, которая выполнена в виде высокочастотного параллельного резонансного колебательного LC-контура, при этом в каждой однофазной цепи плечо с двухсторонней проводимостью из управляемых ключей и активно-индуктивная нагрузка соединены последовательно. В активно-индуктивной нагрузке регулятора-преобразователя переменно-переменного тока формируют одновременно низкочастотный и высокочастотный токи, для чего значение емкости высокочастотного компенсирующего конденсатора выбирают таким, чтобы резонансная частота высокочастотного колебательного LC-контура в 5 и более раз превышала частоту m-фазной низкочастотной сети переменного тока, а импульсы управления для управляемых ключей формируют в виде пачек высокочастотных импульсов, при этом частота следования упомянутых пачек импульсов управления равна частоте m-фазной питающей низкочастотной сети переменного тока, частота следования высокочастотных импульсов управления в пачке равна резонансной частоте высокочастотного параллельного резонансного колебательного LC-контура, а скважность высокочастотных управляющих импульсов в пачке задают из условия максимальной активной мощности в активно-индуктивной нагрузке от воздействия высокочастотного тока. 5 ил.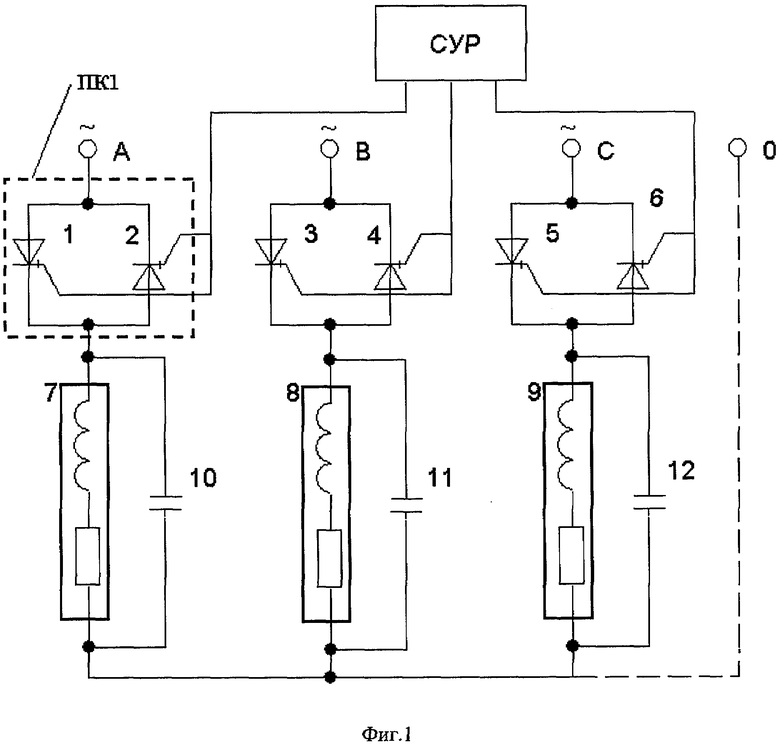
Способ управления m-фазным регулятором-преобразователем переменно-переменного тока, заключающийся в том, что упомянутый регулятор-преобразователь переменно-переменного тока выполняют из m-однофазных цепей, которые соединяют, например, по m-фазной схеме «звезда» и подсоединяют к m-фазной питающей низкочастотной сети переменного тока, при этом каждую однофазную цепь выполняют из последовательно соединенных плеча с двухсторонней проводимостью из встречно-параллельно соединенных управляемых ключей и однофазной активно-индуктивной нагрузки, параллельно которой подсоединяют компенсирующий конденсатор и тем самым образуют параллельный резонансный колебательный LC-контур, при этом формируют прямые и обратные полуволны напряжения и тока в активно-индуктивной нагрузке, для чего поочередно подают на встречно-параллельно включенные управляемые ключи плечей с двухсторонней проводимостью импульсы управления, отличающийся тем, что в активно-индуктивной нагрузке формируют одновременно низкочастотный и высокочастотный токи, для чего значение емкости компенсирующего конденсатора выбирают таким, чтобы резонансная частота упомянутого колебательного LC-контура предпочтительно превышала частоту m-фазной низкочастотной сети переменного тока в 5 и более раз и тем самым параллельный резонансный колебательный LC-контур превращают в высокочастотный параллельный резонансный колебательный LC-контур, при этом импульсы управления для каждого управляемого ключа каждого плеча с двухсторонней проводимостью формируют в виде пачек высокочастотных открывающих и закрывающих импульсов, причем упомянутые пачки импульсов формируют с частотой следования, равной частоте низкочастотной m-фазной питающей сети переменного тока и с длительностью каждой упомянутой пачки импульсов, равной интервалу времени приложения прямого положительного низкочастотного напряжения к каждому управляемому ключу, а высокочастотные открывающие и закрывающие импульсы управления формируют с частотой следования и скважностью, а, следовательно, и соотношением интервалов времени открытого и закрытого состояний каждого упомянутого управляемого ключа, которые обеспечивают максимально возможную активную мощность в активно-индуктивной нагрузке от воздействия высокочастотного тока, для чего на каждом полупериоде напряжения одной из фаз m-фазной питающей низкочастотной сети переменного тока определяют значения активных мощностей в активно-индуктивной нагрузке на каждом периоде высокой частоты от воздействия высокочастотного тока на упомянутом полупериоде низкой частоты, затем определяют среднее значение активной мощности в активно-индуктивной нагрузке от воздействия высокочастотного тока на упомянутом полупериоде низкой частоты, при этом в качестве начального значения частоты следования высокочастотных управляющих импульсов принимают расчетную величину, равную резонансной частоте высокочастотного параллельного резонансного колебательного LC-контура, а в качестве начального значения коэффициента скважности принимают его значение равное 0,5, а затем изменяют упомянутые высокую частоту следования и коэффициент скважности высокочастотных импульсов в обе стороны от их начальных значений до получения максимально возможной активной мощности в активно-индуктивной нагрузке от воздействия высокочастотного тока, при этом команды на изменение частоты следования высокочастотных управляющих импульсов и их скважности формируют поочередно и выдают со сдвигом в сторону запаздывания минимум на один полупериод низкой частоты, например, измеряют и запоминают экспериментальные данные для определения упомянутых средних активных мощностей в активно-индуктивной нагрузке от воздействия высокочастотного тока на (n)-м полупериоде низкой частоты, где n - произвольное целое число, математически обрабатывают упомянутые экспериментальные данные на (n+1)-м полупериоде низкой частоты, а команду на изменение частоты следования высокочастотных импульсов или их скважности выдают на (n+2)-м упомянутом полу периоде низкой частоты.
| БУРКОВ А.Т | |||
| Электронная техника и преобразователи | |||
| - М.: ТРАНСПОРТ, 2001, с.440-442 | |||
| УСТРОЙСТВО ДЛЯ ИНДУКЦИОННОГО НАГРЕВА И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ ИНДУКЦИОННОГО НАГРЕВА | 2002 |
|
RU2231905C2 |

