Область техники, к которой относится изобретение
Заявляемое изобретение относится к области измерительной техники и может быть использовано для определения положения контролируемого объекта относительно других объектов.
Уровень техники
Известен способ измерения формы и положения объекта (авт. св. СССР № 1105756, G01B 11/24, 22.01.79, В.В.Егоров, В.П.Кулеш и др.). По этому способу устанавливают фотоприемники в контрольных точках на поверхности объекта, формируют световой пучок с заданными параметрами, сканируют фотоприемники и судят о контролируемом параметре по совокупности сигналов, снимаемых с фотоприемников. Для повышения точности измерений формируют дополнительный световой пучок, состоящий из набора равноотстоящих световых плоскостей, совмещают оба световых пучка, сканируют фотоприемники совмещенным пучком и подсчитывают число импульсов с каждого фотоприемника от момента начала сканирования до момента попадания на фотоприемник светового пучка с заданными параметрами.
Недостатком этого способа является его невысокая надежность в условиях промышленных предприятий, обусловленная необходимостью применения сложных систем оптического сканирования специально сформированных световых пучков.
Известен способ геодезических измерений объектов по заданным световым маркам (патент РФ № 2079810, G01C 1/00, 20.05.97, А.А.Арефьев, Ю.П.Задоркин), заключающийся в том, что на поверхности контролируемого объекта формируют одновременно не менее трех световых марок (реперов), одна из которых и сохраняет пространственные координаты за время измерения конкретного фрагмента контролируемой поверхности. Координаты остальных (периферийных) световых марок измеряют относительно опорной световой марки, причем задатчик световых марок отличается наличием светоделителя лазерного излучения на три и более световых пучка и соответствующим количеством поворотных устройств периферийных лазерных пучков, снабженных отсчетными механизмами углов поворотов, а также вариантами оригинальных конструкций светоделителя.
Данный способ не обеспечивает высокой достоверности и надежности измерений в производственных условиях. Это обусловлено необходимостью использования при его реализации большого количества прецизионных оптических элементов, подверженных загрязнению и нежелательному влиянию вибрации.
Наиболее близким к заявляемому изобретению по своей сущности и достигаемому результату является изобретение под названием «Способ измерения положения объекта», на который выдан патент РФ № 2146039 (заявка № 97120250 от 26.11.97, G01B 11/00, G01B 21/00, G01S 17/66, патентообладатель ОАО «Нижнетагильский металлургический комбинат», авторы Ю.Н.Карфидов, И.П.Иерусалимов).
Согласно этому способу на поверхности объекта устанавливают, по крайней мере, одну световую марку (репер), т.е. обеспечивают разные световые потоки репера и поверхностей, которые используют для определения положения объекта и являются фоном для реперов. Пространственные координаты световой марки определяют по положению ее изображения на координатно-чувствительном фотоприемном устройстве оптической камеры. При этом в качестве световой марки используют импульсный световой излучатель, фаза и частота которого синхронизированы с запуском фотоприемного устройства оптической камеры.
Известное изобретение повышает достоверность и надежность измерений по сравнению с известными способами за счет сокращения количества необходимых прецизионных оптических измерений. Однако в некоторых производственных условиях достоверность и надежность этого способа измерений может оказаться недостаточной. Искажающими факторами могут быть, например, большой световой поток окружающих объектов, соизмеримый со световым потоком световой марки, возникновение бликов во время перемещения исследуемого объекта и в статическом положении, соизмеримых по световому потоку с потоком световой марки, наличие в рабочей зоне испарений в виде тумана и, как следствие, запотевание поверхности световой марки, а также ее загрязнение.
Задачей заявляемого изобретения является создание способа измерения положения объекта, в большей степени обеспечивающего достоверность и надежность измерений.
Раскрытие изобретения
Сущность заявляемого изобретения заключается в том, что в способе измерения положения объекта с помощью оптической регистрации, по которому устанавливают реперы, обеспечивают разные световые потоки реперов и поверхностей, на фоне которых регистрируют реперы, предварительно определяют координаты реперов и измеряют пространственные координаты объекта по положению его изображения на экране приемного устройства, реперы устанавливают в зоне нахождения объекта на поверхности, относительно которой измеряют положение объекта, разные световые потоки реперов и фоновых поверхности обеспечивают выполнением последних в виде экранов, которые устанавливают за объектом и реперами, при этом каждый из экранов отражает свет в направлении расположенной напротив него видеокамеры или, наоборот, поглощает свет, видеосъемки реперов и объекта производят не менее чем в двух направлениях и передают изображение в блоки обработки изображений, а пространственные координаты объекта определяют по расположению изображения объекта относительно изображений реперов на экране дисплея.
Реперы могут быть выполнены в виде штырей разного диаметра или разной высоты.
Сопоставительный анализ показывает, что заявляемое изобретение отличают от прототипа следующие признаки:
- реперы устанавливают в зоне нахождения объекта на поверхности, относительно которой измеряют положение объекта,
- разные световые потоки реперов и фоновых поверхностей обеспечивают выполнением последних в виде экранов, которые устанавливают за объектом и реперами, при этом каждый из экранов отражает свет в направлении расположенной напротив него видеокамеры или поглощает свет,
- видеосъемки реперов и объекта производят не менее чем в двух направлениях и передают изображение в блоки обработки изображений, а пространственные координаты объекта определяют по расположению изображения объекта относительно изображений реперов на экране дисплея.
Таким образом, можно сделать вывод о соответствии заявляемого изобретения условию «новизна».
Технический результат, благодаря которому решается поставленная задача, заключается в том, что при использовании заявляемого способа влияние производственных условий на работоспособность средств, применяемых для реализации способа, несущественно и не отражается на достоверности и надежности измерений.
При дополнительном поиске не выявлено технических решений в данной области техники, содержащих признаки, отличающие заявляемое изобретение от прототипа. Поэтому можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Краткое описание чертежей
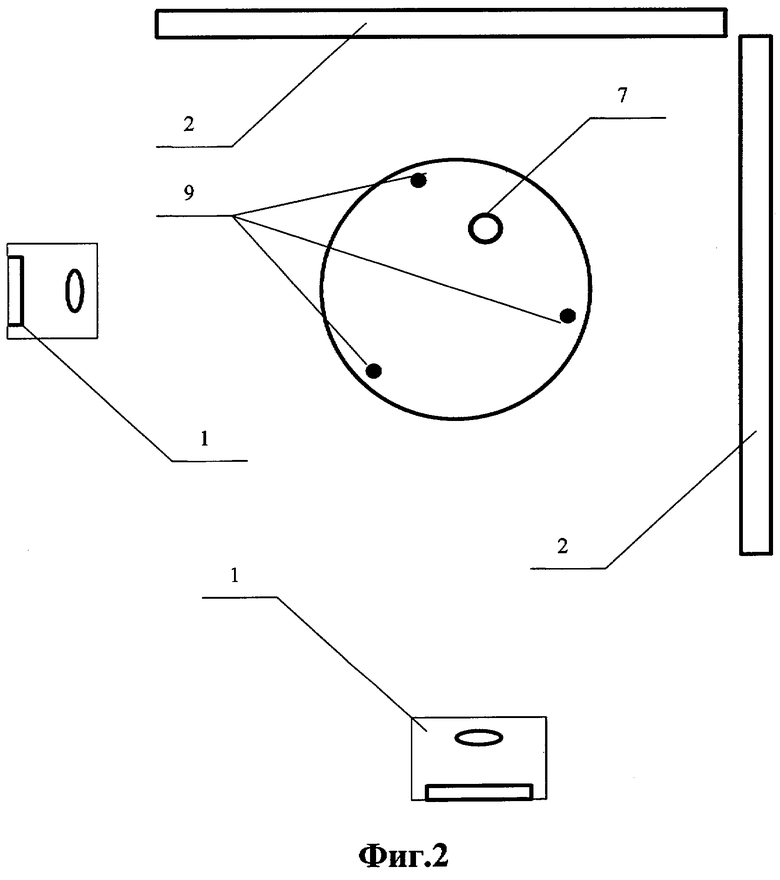
На фиг.1 изображен вид сбоку оптической системы для непрерывного дистанционного определения координат нижнего конца ампулы или пучка ТВЭЛ - тепловыделяющих элементов - (в случае безампульного хранения) при загрузке в конкретную ячейку транспортного контейнера (далее по тексту - контейнер) в камере разделки отработанных тепловыделяющих систем.
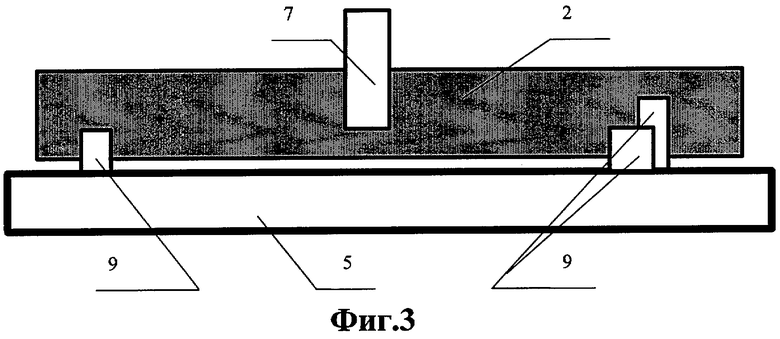
На фиг.2 изображен схематически вид сверху зоны измерения.
На фиг.3 показано регистрируемое на экране дисплея изображение.
Осуществление изобретения
Осуществление изобретения представляется на примере контроля загрузки ампулы или пучка ТВЭЛ (далее по тексту - объект) в ячейку контейнера.
Загрузка осуществляется в условиях исключительно высокого радиационного фона, поэтому необходимо непрерывное дистанционное бесконтактное определение координат нижнего конца объекта. Одновременно контролируется состояние конца объекта для оценки его проходимости в ячейку контейнера. Такой контроль исключает возможность технологических радиационных аварий. Для осуществления контроля монтируют оптическую систему, которую образуют не менее чем двумя видеокамерами 1 и светопоглощающими экранами 2.
Видеокамеры 1 снабжают встроенными блоками обработки изображений (на чертеже не показаны), которые соединены в сеть друг с другом и с дисплеем (на чертеже не показан). С помощью гермовводов 3 видеокамеры 1 размещают в защитной стенке 4 разделочной камеры с разных сторон относительно места установки контейнера 5 так, чтобы их оптические оси пересекались под углом, например под прямым углом в горизонтальной плоскости, касательной к верхнему срезу 6 контейнера 5, через который (срез 6) производится загрузка объекта 7 в ячейку 8.
Экраны 2 располагают напротив видеокамер 1. Контейнер 5 устанавливают между видеокамерами 1 и экранами 2. На верхнем срезе 6 контейнера 5, желательно по периметру, устанавливают реперы 9 в виде трех штырей разной высоты, поверхности которых отражают свет.
Экраны 2 выполняют в виде пластин из нержавеющей стали с полированными поверхностями (светоотражающие экраны). При этом обеспечивают такие отражающие свойства поверхностей экранов 2, которые отличаются от отражающих свойств поверхностей реперов 9 и объекта 7.
Экраны 2 могут быть выполнены в виде пластин, поверхности которых покрыты светопоглощающей краской (светопоглощающие экраны). В качестве экранов могут быть использованы элементы конструкции камеры разделки, которые в меньшей степени освещены источниками света, существующими внутри камеры.
В камере разделки очень большая освещенность, поэтому нет необходимости в привлечении дополнительных источников света.
После окончания монтажа оптической системы определяют координаты реперов 9 относительно ячейки 8 в двух направлениях - по оптическим осям видеокамер 1 - заносят эти сведения в блоки обработки изображений и отображают зарегистрированное на экране дисплея.
После этого начинают опускать объект 7 к ячейке 8 с использованием подъемного крана (на чертеже не показан). С помощью видеокамер 1 и блоков обработки изображений определяют текущие координаты конца объекта 7 по отношению к реперам 9. На экране дисплея демонстрируют положение объекта 7, сопоставляют текущие координаты его положения с запомненными ранее координатами реперов 9 относительно ячейки 8, в случае необходимости корректируют положение изображения объекта 7 на экране. Соответствующие сигналы поступают в систему управления подъемным краном, которая корректирует положение объекта 7 относительно ячейки 8. Блоки каждой из видеокамер 1 работают в полностью автоматическом режиме, координируют свою работу по сети, обмениваясь необходимыми данными. При этом не требуется какого-либо управления со стороны персонала, который участвует только в корректировке положения изображения объекта 7 на экране дисплея. Полученная информация заносится в базу данных и одновременно представляется в графическом виде на экране дисплея.
Как видно из изложенного выше, подбором светоотражающих (светопоглощающих) свойств поверхностей реперов 9, экранов 2 можно обеспечить оптическую различимость этих элементов системы практически в любых производственных условиях и соответственно обеспечить высокую достоверность и надежность измерений.
Кроме того, представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- заявляемый способ предназначен для определения положения контролируемого объекта относительно других объектов;
- подтверждена возможность осуществления заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, с помощью средств и методов, описанных в заявке и известных на момент ее оформления.
Следовательно, можно сделать вывод о соответствии заявляемого изобретения условию «промышленная применимость».
Изобретение относится к области измерительной техники и может быть использовано для определения положения контролируемого объекта относительно других объектов. Способ осуществляется с помощью оптической регистрации и включает установку реперов, предварительное определение координат каждого репера, обеспечение разных световых потоков реперов и поверхностей, на фоне которых регистрируют реперы. Реперы устанавливают в зоне нахождения объекта на поверхности, относительно которой измеряют положение объекта. Установкой экранов напротив видеокамер за объектом и реперами обеспечивают разные световые потоки реперов и поверхностей, на фоне которых регистрируют реперы. Каждый из экранов отражает свет в направлении расположенной напротив него видеокамеры или поглощает свет. Одновременно теми же камерами не менее чем в двух направлениях производят видеосъемку объекта и передают изображение в блоки обработки изображений, а пространственные координаты объекта определяют по расположению изображения объекта относительно изображений реперов на экране дисплея. Технический результат - уменьшение влияния производственных факторов на достоверность и надежность измерений. 2 з.п. ф-лы, 3 ил.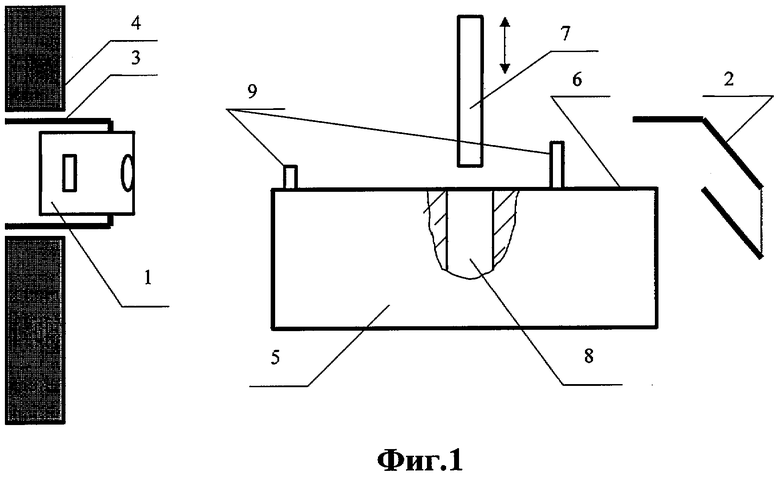
| УСТРОЙСТВО ДЛЯ ОЖИВЛЕНИЯ МНИМОУМЕРШИХ | 1967 |
|
SU214039A1 |
| FR 2847357, 21.05.2004 | |||
| ГИТАРА СМЕННЫХ ШЕСТЕРЕН | 1992 |
|
RU2044202C1 |
| Устройство для измерения координат объекта | 1990 |
|
SU1737754A1 |

