Известен зубчатый автоматический вариатор" /патент №2274785/, включающий корпус, ведущий и нагрузочный валы, планетарный механизм, кинематически объединяющий две концентрические ступицы, внутренняя из которых охвачена замкнутым эллиптическим пазом полукруглого сечения, а внешняя имеет по образующим посадочного отверстия пазы полукруглого сечения для сочетания с эллиптическим пазом посредством шаров, и коронную шестерню, отличающийся тем, что внутренняя ступица расположена свободно на ведущем валу, который выполнен заодно с солнечной шестерней, связанной с коронной посредством сателлитов, оси которых закреплены на торце внутренней ступицы, имеющей развитие противоположного торца для ее блокировки с корпусом, а нагрузочный вал является осевым развитием коронной шестерни.
Опытная проверка экспериментального образца вариатора показала, что неизменный угол наклона плоскости эллиптического паза к оси ведущего вала не является оптимальным применительно к различным режимам работы вариатора. Так, в момент трогания и в других случаях повышенной нагруженности желательно плоскость эллиптического паза расположить под меньшим углом α к оси ведущего вала для получения максимальной составляющей  с последующей ее проекцией на плоскость вращения внутренней ступицы. Но в этом случае удлиняется большая ось эллипса и в ее крайних точках наблюдается чрезмерный нагрев ступицы в результате резкого изменения траектории относительного движения шара. Вариатор заклинивает. При незначительной нагрузке угол должен быть увеличенным, но тогда теряются функции вариатора в нагруженном и близком к нему состояниях. Приходится довольствоваться средним значением угла α, что требует увеличения массы шара и сопровождается неоправданным увеличением расхода мощности в ненагруженных режимах. Постоянство угла α не лучшим образом влияет и на дифференциацию избирательной способности вариатора, поэтому считать решение вопроса трансформации крутящего момента окончательным нельзя.
с последующей ее проекцией на плоскость вращения внутренней ступицы. Но в этом случае удлиняется большая ось эллипса и в ее крайних точках наблюдается чрезмерный нагрев ступицы в результате резкого изменения траектории относительного движения шара. Вариатор заклинивает. При незначительной нагрузке угол должен быть увеличенным, но тогда теряются функции вариатора в нагруженном и близком к нему состояниях. Приходится довольствоваться средним значением угла α, что требует увеличения массы шара и сопровождается неоправданным увеличением расхода мощности в ненагруженных режимах. Постоянство угла α не лучшим образом влияет и на дифференциацию избирательной способности вариатора, поэтому считать решение вопроса трансформации крутящего момента окончательным нельзя.
Задачей заявляемого технического решения является устранение отмеченных недостатков, связанных с постоянством угла α.
Решение задачи достигается тем, что сферический автоматический вариатор, включающий корпус, две концентрические ступицы с пазами полукруглого сечения для силового взаимодействия посредством шаров, внутренняя из которых расположена на ведущем валу, а осевое развитие внешней является нагрузочным валом, содержит внутреннюю ступицу, выполненную в виде базисного шара, охваченного в диаметральной плоскости круговым пазом с возможностью изменения угла его наклона к оси ведущего вала в заданных пределах, и шарнирно расположенную на пальце, жестко закрепленном на ведущем валу и находящемся в одной плоскости с круговым пазом, при этом точка прямоугольного пересечения их осей является центром сферы для обеих ступиц, а плоскости расположения пазов внешней ступицы совпадают с осью ведущего вала.
Новизна изобретения усматривается в том, что сферический автоматический вариатор обеспечивает, в зависимости от нагрузки, автоматическое изменение угла наклона плоскости кругового паза к оси ведущего вала в заданных пределах.
По данным патентной и научно-технической литературы заявляемая конструкция не обнаружена, что позволяет судить об изобретательском уровне заявляемого решения.
Промышленная применимость обусловлена тем, что использование сферического автоматического вариатора возможно прежде всего в автомобиле- и тракторостроении.
На чертеже представлена принципиальная схема сферического автоматического вариатора. Он устроен следующим образом.
В корпусе вариатора 1 расположен ведущий вал 2, жестко связанный с пальцем 3 таким образом, что их оси взаимоперпендикулярны. Палец 3 является местом шарнирной посадки внутренней ступицы 4. Диаметральная плоскость ступицы 4 охвачена круговым пазом 5 полукруглого сечения. В этой же плоскости находится и палец 3, а сама плоскость расположена под острым углом α к оси ведущего вала 2. Угол α может изменяться в пределах, обусловленных секторными окнами 6. Точка пересечения осей ведущего вала 2 и пальца 3 является центром сферы для обеих ступиц, внешняя 7 из которых содержит пазы полукруглого сечения 8 для силового взаимодействия с внутренней ступицей 4 посредством шаров 9. Пазы 8 расположены в плоскостях, совпадающих с осью ведущего вала 2. Осевым развитием внешней ступицы 7 является нагрузочный вал 10, который сопрягается с ведущим валом 2 посредством подшипника 11. Работает вариатор следующим образом.
При вращении ведущего вала 2 до момента трогания внутренняя ступица 4, как шар, разделенный пазом 5 на две равные части, поворачивается в сторону уменьшения угла α под действием пары центробежных сил  и
и  . Минимальный угол α, соответствующий максимальному значению импульса силы шара
. Минимальный угол α, соответствующий максимальному значению импульса силы шара  /т.к. скорость шара максимальная/, ограничивается упором окон 6 непосредственно в ведущий вал 2. Даже в этом положении траектория движения шара 9 остается круговой и сосредоточенная концентрация высоких температур по пазу отсутствует, что повышает его долговечность. Сумма импульсов сил шаров
/т.к. скорость шара максимальная/, ограничивается упором окон 6 непосредственно в ведущий вал 2. Даже в этом положении траектория движения шара 9 остается круговой и сосредоточенная концентрация высоких температур по пазу отсутствует, что повышает его долговечность. Сумма импульсов сил шаров  с одной стороны ступицы 4 совместно с суммой импульсов сил шаров
с одной стороны ступицы 4 совместно с суммой импульсов сил шаров  с другой стороны, проецируясь на плоскость вращения ступицы 4, образует наибольший крутящий момент. Внешняя ступица 7 приходит во вращение. При этом количество движения шара
с другой стороны, проецируясь на плоскость вращения ступицы 4, образует наибольший крутящий момент. Внешняя ступица 7 приходит во вращение. При этом количество движения шара  , где m - масса шара,
, где m - масса шара,  - максимальная относительная скорость шара в противоположных направлениях по концам диаметра, а импульс силы шара
- максимальная относительная скорость шара в противоположных направлениях по концам диаметра, а импульс силы шара  , где Δt - время прохождения шаром полупериметра кругового паза 5. По мере раскручивания внешней ступицы 7 относительная скорость шара по круговому пазу 5 уменьшается, импульс силы
, где Δt - время прохождения шаром полупериметра кругового паза 5. По мере раскручивания внешней ступицы 7 относительная скорость шара по круговому пазу 5 уменьшается, импульс силы  становится меньше, уменьшается и создаваемый крутящий момент. При дальнейшем уменьшении сопротивления и, соответственно, увеличении скорости движения автомобиля синусоидальный характер абсолютного движения шара еще более сглаживается и наступает режим прямой передачи. В отличие от прототипа, благодаря сферическому исполнению шарового механизма, шар не прерывает силового воздействия на внешнюю ступицу 7 в крайних точках дугообразного паза /по аналогии с крайними точками большой оси эллиптического паза/. Это - повышение КПД, т.е. экономичность. Таким образом, следствием автоматической оптимизации угла наклона плоскости кругового паза является экономичность, расширение пределов избирательной способности вариатора и повышение долговечности.
становится меньше, уменьшается и создаваемый крутящий момент. При дальнейшем уменьшении сопротивления и, соответственно, увеличении скорости движения автомобиля синусоидальный характер абсолютного движения шара еще более сглаживается и наступает режим прямой передачи. В отличие от прототипа, благодаря сферическому исполнению шарового механизма, шар не прерывает силового воздействия на внешнюю ступицу 7 в крайних точках дугообразного паза /по аналогии с крайними точками большой оси эллиптического паза/. Это - повышение КПД, т.е. экономичность. Таким образом, следствием автоматической оптимизации угла наклона плоскости кругового паза является экономичность, расширение пределов избирательной способности вариатора и повышение долговечности.
Для реализации изобретения необходимы следующие технологии и оборудование. Станки: токарный, фрезерный, протяжный, шлифовальный. В качестве технологического примера поштучного изготовления дугообразных пазов для внешней ступицы можно использовать вертикально-фрезерный, а затем шлифовальный станки с запрограммированным поворотом в горизонтальной плоскости кондуктора с заготовкой дугообразного паза.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАРИАТОР СФЕРИЧЕСКИЙ | 2007 |
|
RU2342576C1 |
| ЗУБЧАТЫЙ АВТОМАТИЧЕСКИЙ ВАРИАТОР | 2004 |
|
RU2274785C1 |
| ЗУБЧАТЫЙ АВТОМАТИЧЕСКИЙ ВАРИАТОР | 2006 |
|
RU2310114C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2007 |
|
RU2363852C2 |
| ТРАНСМИССИЯ АВТОМОБИЛЯ | 2004 |
|
RU2282542C2 |
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2008 |
|
RU2364775C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА СКОРОСТЕЙ | 1999 |
|
RU2157932C2 |
| БЕССТУПЕНЧАТАЯ АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА | 1999 |
|
RU2161279C2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2191274C2 |
| МЕХАНИЗМ ПРИВОДА МОЛОТИЛЬНОГО БАРАБАНА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2003 |
|
RU2242113C1 |
Изобретение относится к машиностроению. Сферический автоматический вариатор содержит корпус (1), две концентрические ступицы (4, 7), внутренняя (4) из которых выполнена в виде базисного шара, охваченного в диаметральной плоскости круговым пазом (5) полукруглого сечения. Внутренняя ступица (4) шарнирно установлена на пальце (3), который жестко закреплен на ведущем валу (2) и находится в одной плоскости с круговым пазом (5) полукруглого сечения. Точка прямоугольного пересечения осей пальца (3) и вала (2) является центром сферы для обеих ступиц. Плоскость кругового паза (5) может находиться под различным углом наклона к оси ведущего вала (2) в зависимости от нагрузки. Внешняя ступица (7) содержит дугообразные пазы (8) полукруглого сечения, плоскости расположения которых совпадают с осью ведущего вала (2). Посредством шаров (9) обе ступицы кинематически взаимосвязаны. Осевым развитием внешней ступицы (7) является нагрузочный вал (10), который сопрягается с ведущим валом (2) посредством подшипника (11). Расширены пределы избирательной способности, долговечности и экономичности. 1 ил.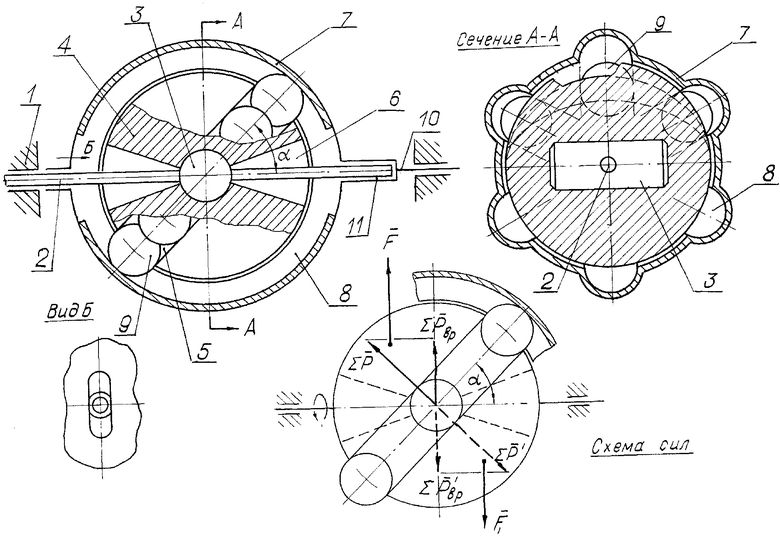
Сферический автоматический вариатор, включающий корпус, две концентрические ступицы с пазами полукруглого сечения для силового взаимодействия посредством шаров, внутренняя из которых расположена на ведущем валу, а осевое развитие внешней является нагрузочным валом, отличающийся тем, что внутренняя ступица выполнена в виде базисного шара, охваченного в диаметральной плоскости круговым пазом с возможностью изменения угла его наклона к оси ведущего вала в заданных пределах, и шарнирно расположена на пальце, жестко закрепленном на ведущем валу и находящимся в одной плоскости с круговым пазом, при этом точка прямоугольного пересечения их осей является центром сферы для обеих ступиц, а плоскости расположения пазов внешней ступицы совпадают с осью ведущего вала.
| RU 2004126413 А, 10.02.2006 | |||
| БЕССТУПЕНЧАТАЯ АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА | 1999 |
|
RU2161279C2 |
| АВТОМАТИЧЕСКАЯ КОРОБКА СКОРОСТЕЙ | 1999 |
|
RU2157932C2 |
| WO 2004008003 A1, 22.01.2004. | |||

