Изобретение относится к электротехнике и может быть использовано в системах индукционного нагрева с полупроводниковыми преобразователями частоты.
Известны способы широтно-импульсного управления при естественной коммутации переменного тока. Цель регулирования в данном случае состоит в изменении действующего значения напряжения на активной нагрузке для преобразования электрической энергии в тепловую. При таком регулировании период цикла входного тока регулятора много больше периода резонансной частоты колебательного контура (см., например, Зиновьев Г.С. Основы силовой электроники. - Новосибирск: Изд-во НГТУ, 2003). Недостатком данного способа управления является сужение диапазона регулирования при работе преобразователя частоты на колебательные контуры с высокой добротностью вследствие слабого затухания колебаний в контуре. Для достижения необходимого диапазона регулирования приходится предусматривать большее количество пропусков импульсов. Это приводит к появлению субгармоник на частотах, значительно меньших резонансной частоты. Последнее обстоятельство приводит к эмиссии низкочастотных помех в сеть, нормы которых устанавливаются государственными стандартами на качество электроэнергии.
Наиболее близок к изобретению способ управления резонансным инвертором со встречно-параллельными диодами, заключающийся в формировании и поочередной подаче импульсов управления на силовые коммутирующие приборы, формирующие прямую и обратную полуволны тока в нагрузке (Силкин Е.М. Способ управления резонансным инвертором со встречно-параллельными диодами. - Патент на изобретение №2152683).
При данном способе управления можно решить задачу стабилизации уровня выходного напряжения инвертора при питании электротехнологической нагрузки с изменяющимися в широких пределах параметрами. При этом дополнительно улучшаются технико-экономические показатели и повышается КПД установки за счет поддерживания выходной мощности инвертора в процессе плавки на максимально возможном уровне. Недостатками данного способа являются:
1) Невозможность стабилизации мощности потребляемой нагрузкой. Это приводит к сокращению функциональных возможностей данного способа регулирования.
2) Малый коэффициент использования силовых коммутирующих элементов схемы, так как ток нагрузки является прерывистым. Это приводит к ухудшению технико-экономических показателей, таких как стоимость силовых коммутирующих элементов, увеличение массогабаритных показателей.
Целью изобретения является регулирование заданного технологического параметра (уровень выходного напряжения, тока и мощности), улучшение технико-экономических и массогабаритных показателей.
Поставленная цель достигается тем, что в способе управления резонансным инвертором со встречно-параллельными диодами, заключающемся в формировании и поочередной подаче импульсов управления на силовые коммутирующие приборы, формирующие прямую и обратную полуволны тока в нагрузке, задают уровни технологического параметра, разрешающие и запрещающие подачу управляющих импульсов на силовые коммутирующие приборы, измеряют текущее среднее значение технологического параметра за несколько последних периодов резонансной частоты, включают разрешение на подачу управляющих импульсов, если измеренное текущее среднее значение технологического параметра меньше заданного разрешающего уровня, и выключают разрешение на подачу управляющих импульсов с одновременным закорачиванием входа нагрузки силовыми коммутирующими приборами инвертора входа нагрузки, если измеренное текущее среднее значение больше или равно уровню, запрещающему подачу управляющих импульсов.
При таком способе управления расширяются функциональные возможности:
- имеется возможность регулирования тока, напряжения или мощности на нагрузки;
- повышается использование элементов схемы, т.к. ток в нагрузке протекает непрерывно.
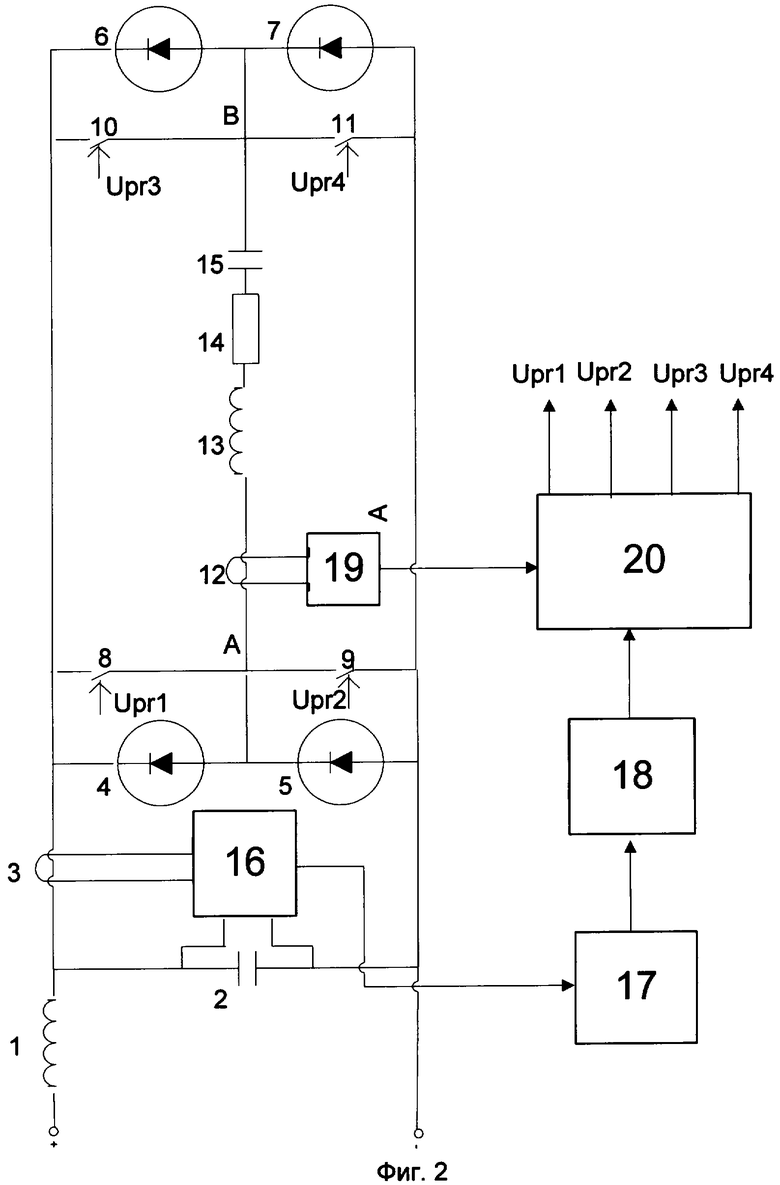
Сущность способа поясняется со ссылками на чертежи, на которых представлено: на фиг.1 - временные диаграммы работы схемы, реализующей способ; на фиг.2 - функциональная схема силовой части и схемы управления инвертором, реализующей данный способ.
На фиг.1: U1 - напряжение на выходе преобразователя 17; U2 - сигнал на выходе компаратора 18; U3 - сигнал блока синхронизации 19; U4 - сигнал компаратора 18, синхронизированный с сигналом блока 19; Uоп - величина стабилизируемого значения (уставка) технологического параметра; Δ - величина допустимого отклонения технологического параметра от уставки; Uвых - напряжение между точками А и В на выходе мостового инвертора; Iвых - ток нагрузки на выходе мостового инвертора; Твк - временной интервал вынужденных колебаний тока в контуре; Тск - временной интервал свободных колебаний тока в контуре.
Схема устройства для реализации способа управления резонансным инвертором со встречно-параллельными диодами на фиг.2 включает резонансный инвертор, имеющий на входе Г-образный фильтр, состоящий из дросселя 1 и фильтрового конденсатора 2, подключенный последовательно через датчик тока 3 к мостовому инвертору, содержащему силовые коммутирующие приборы 8, 9, 10, 11, параллельно которым встречно включены диоды 4, 5, 6, 7. Нагрузка инвертора содержит последовательный резонансный контур, состоящий из индуктора 13 с нагреваемой заготовкой 14 и компенсирующего его реактивную энергию конденсатора 15. Система управления состоит из датчика 16 технологического параметра (например, потребляемой мощности), преобразователя 17 среднего текущего значения технологического параметра, компаратора 18 с гистерезисом, блока синхронизации 19 с нулем коммутируемого тока инвертора, формирователя 20 последовательностей управляющих импульсов (Upr1, Upr2, Upr3, Upr4) в режиме вынужденных колебаний и в режиме свободных колебаний тока колебательного контура.
Устройство работает следующим образом: на вход датчика 16 технологического параметра подается сигнал с датчика тока 3 и напряжение с фильтровой емкости 2. С выхода датчика 16 сигнал поступает на вход преобразователя 17 среднего текущего значения, где производится усреднение полученного сигнала за несколько периодов резонансной частоты инвертора. Полученный сигнал подается на вход компаратора 18, с выхода которого уровень логической единицы является сигналом к запуску формирователя 20 в режиме вынужденных колебаний, а уровень логического нуля - сигналом к запуску формирователя в режиме свободных колебаний тока колебательного контура. В начальном состоянии (t0-t2), когда сигнал U2 на выходе преобразователя 17 среднего значения технологического параметра еще не достиг верхней границы допустимого отклонения (Uоп+Δ) от величины уставки (Uоп), на выходе компаратора 18 присутствует сигнал логической единицы (U3), разрешающий работу формирователя 20 управляющих импульсов в режиме вынужденных колебаний. После того как сигнал U2 на выходе преобразователя среднего значения 17 достиг верхней границы допустимого отклонения, (момент времени t2), выход компаратора 18 переходит в состояние логического нуля, разрешая работу формирователя 20 управляющих импульсов в режиме свободных колебаний тока колебательного контура. Интервал свободных колебаний тока формируется за счет закоротки между точками А и В (см. фиг.2). Для этого необходимо подать управляющие импульсы Upr1, Upr3, открывающие силовые коммутирующие приборы 8 и 10, которые, в свою очередь, формируют две внешние цепи закоротки для последовательного резонансного контура: цепь для положительной полуволны резонансного тока включает в себя обратный диод 4 и коммутирующий прибор 10; цепь для отрицательной полуволны резонансного тока включает в себя обратный диод 6 и коммутирующий прибор 8. Выход формирователя 20 синхронизируется с нулем коммутируемого тока посредством блока 19, входом для которого является выход с датчика тока 12. После синхронизации с нулем коммутируемого тока (момент времени t3) формирователь 20 выдает на выходе интервал свободных колебаний тока нагрузки. После того как сигнал на выходе блока 17 достиг нижней границы (Uоп-Δ) допустимого отклонения от величины уставки (момент времени t4), выход компаратора 18 переходит в состояние логической единицы, разрешая работу формирователя 20 в режиме вынужденных колебаний. После синхронизации с нулем коммутируемого тока, посредством блока синхронизации 19, в момент времени t5, на выходе формирователя 20 выдается последовательность управляющих импульсов Upr1, Upr2, Upr3 и Upr4 в режиме вынужденных колебаний, которые подаются на вход силовых коммутирующих приборов 8, 9, 10, 11. Таким образом, производится регулирование заданного технологического параметра по принципу слежения за входной координатой технологического параметра.
По заявляемому способу напряжение Uвых и ток Iвых на выходе инвертора формируется в соответствии с диаграммой, приведенной на фиг.1.
Таким образом, рассмотренный способ управления имеет следующие преимущества:
- Регулирование заданного технологического параметра производится при высоком коэффициенте использования силовых коммутирующих элементов схемы за счет того, что ток нагрузки не является прерывистым;
- Значительно уменьшены динамические потери на переключение силовых коммутирующих приборов, так как переключение происходит при нулевом токе нагрузки.
Перечисленные выше достоинства позволяют значительно повысить технико-экономические показатели данного способа регулирования.
Способ управления резонансным инвертором относится к области электротехники и может быть использован в системах управления резонансным инвертором с широтно-импульсной модуляцией для установок индукционного нагрева. Технический результат - расширение функциональных возможностей, посредством обеспечения возможности регулирования любого из следующих технологических параметров: выходного напряжения, тока и мощности; а также увеличение диапазона регулирования технологического параметра при питании электротехнической нагрузки с изменяющимися в широких пределах параметрами. Способ управления заключается в формировании и поочередной подаче импульсов управления на транзисторы, формирующие прямую и обратную полуволны тока в нагрузке. Новым в способе является то, что сначала задают уровни технологического параметра, разрешающие и запрещающие подачу управляющих импульсов. При работе измеряют текущее среднее значение технологического параметра за несколько последних периодов резонансной частоты и сравнивают ее с заданными уровнями. Если измеренное текущее среднее значение измеряемого технологического параметра меньше заданного разрешающего уровня, включают разрешение на подачу управляющих импульсов. Если измеренное текущее среднее значение больше или равно уровню, запрещающему подачу управляющих импульсов, выключают разрешение на подачу управляющих импульсов с одновременным закорачиванием входа нагрузки силовыми коммутирующими приборами инвертора входа нагрузки. Способ позволяет регулировать ток, напряжение или мощность на нагрузке, при этом повышается использование элементов схемы, т.к. ток в нагрузке протекает непрерывно. 2 ил.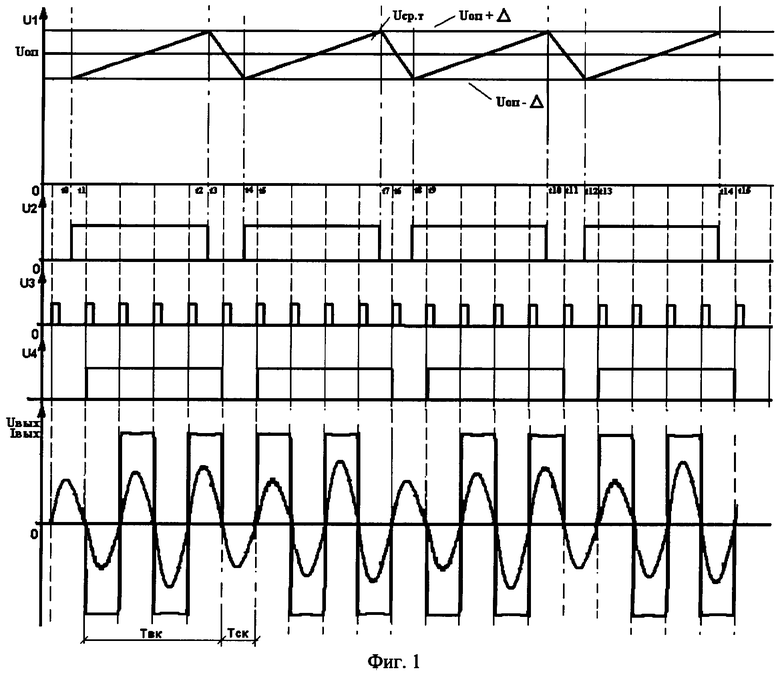
Способ управления резонансным инвертором со встречно-параллельными диодами, заключающийся в формировании и поочередной подаче импульсов управления на силовые коммутирующие приборы, формирующие прямую и обратную полуволны тока в нагрузке, отличающийся тем, что задают уровни технологического параметра, разрешающие и запрещающие подачу управляющих импульсов на силовые коммутирующие приборы, измеряют текущее среднее значение технологического параметра за несколько последних периодов резонансной частоты, разрешение на подачу управляющих импульсов включается, если измеренное текущее среднее значение технологического параметра меньше заданного разрешающего уровня, и выключают разрешение на подачу управляющих импульсов с одновременным закорачиванием силовыми коммутирующими приборами инвертора входа нагрузки, если измеренное текущее среднее значение больше или равно уровню, запрещающему подачу управляющих импульсов.
| СПОСОБ УПРАВЛЕНИЯ РЕЗОНАНСНЫМ ИНВЕРТОРОМ СО ВСТРЕЧНО-ПАРАЛЛЕЛЬНЫМИ ДИОДАМИ | 1999 |
|
RU2152683C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЗОНАНСНЫМ ИНВЕРТОРОМ СО ВСТРЕЧНО-ПАРАЛЛЕЛЬНЫМИ ДИОДАМИ | 1997 |
|
RU2117378C1 |
| ПРЕСС ДЛЯ ПРОИЗВОДСТВА КИП ИЗ КОРНЕВОЙ МАССЫ ЛЕКАРСТВЕННЫХ РАСТЕНИЙ | 2000 |
|
RU2171567C1 |

