Изобретение относится к добыче нефти и может быть использовано для эксплуатации скважин, оборудованных электронасосами, в частности погружными электронасосами с вентильным приводом.
Известен способ эксплуатации скважины насосом с частотно-регулируемым электроприводом (Авторское свидетельство СССР №1262026), основанный на регулировании скорости притока жидкости из пласта в скважину путем периодического повторения циклов, каждый из которых состоит из последовательно осуществляемых процессов запуска при увеличивающейся частоте питающего напряжения, подачи жидкости насосом в колонну подъемных труб при повышенной в сравнении с номинальным значением частоте и уменьшении до нуля подачи насоса путем снижения частоты питающего напряжения после достижения заданной величины давления в колонне труб, с последующим отключением насоса и сливом жидкости из колонны подъемных труб через насос в скважину, после завершения которого цикл повторяют.
Особенность этого способа состоит в ограничении притока жидкости из пласта в скважину в результате систематического слива жидкости из колонны подъемных труб, а это не обеспечивает эффективного регулирования режима эксплуатации скважины.
Наиболее близким к предлагаемому является способ эксплуатации скважины электронасосом с частотно-регулируемым приводом (Патент РФ на изобретение №2119578), в котором динамическая эксплуатация скважины включает периодическое повторение циклов, в которых осуществляют запуск насоса при увеличивающейся частоте питающего напряжения и подачу жидкости насосом при заданной частоте, причем после достижения заданной величины давления в колонне труб в текущем цикле уменьшают частоту питающего напряжения до прекращения подачи насоса, с последующим поддержанием для обеспечения притока жидкости из пласта максимальной частоты, при которой насос не возобновляет подачу, а после достижения в процессе притока максимальной величины давления на приеме насоса цикл повторяют, восстанавливая подачу насоса переводом его на повышенную частоту, при этом в фазе притока текущего цикла осуществляют модуляцию частоты напряжения питания электронасоса в области значений частоты, соответствующих изменяющимся в процессе притока параметрам насоса при прекращении и возобновлении подачи. В процессе притока модулируют частоту напряжения питания электронасоса с заданной периодичностью и во времени, и в заданном диапазоне отклонений от частоты при прекращении подачи насоса до максимальной частоты, при которой насос не возобновляет подачу.
Известное изобретение является способом динамической эксплуатации скважины насосом с частотно-регулируемым приводом. Указанный способ состоит в целенаправленной реализации режимов работы УЭЦН, учитывающей изменение параметров системы "пласт-скважина-УЭЦН" на всем периоде эксплуатации установки. Однако данный способ предназначен, главным образом, для регулирования с учетом параметров скважины и требует измерения давления в колонне труб.
В основу предлагаемого изобретения положена задача разработать способ динамической эксплуатации скважины электронасосом с вентильным электродвигателем с частотно-регулируемым приводом, позволяющий организовать динамическую эксплуатацию скважины без проведения измерения давлений в колонне труб и сделать процесс поиска рабочего режима насоса, дающего наибольший дебит скважины, более эффективным, т.е. обеспечить достижение максимально возможного дебита жидкости (технического потенциала) для данной скважины и параметров установки.
Задача решается тем, что способ динамической эксплуатации скважины электронасосом с частотно-регулируемым приводом, основанный на периодическом повторении циклов, включает запуск электронасоса при увеличивающейся частоте питающего напряжения, подачу жидкости электронасосом при заданной частоте вращения, причем откачку жидкости производят электронасосом с вентильным электродвигателем, при работе электронасоса в стационарном режиме через заданные интервалы времени, определяемые длительностью переходных процессов в системе "пласт-скважина", периодически увеличивают частоту вращения вентильного электродвигателя на заданную величину, определяемую порогом чувствительности тока вентильного электродвигателя, до снижения тока вентильного электродвигателя ниже его порогового значения на данной частоте вращения, соответствующего срыву подачи электронасоса, по которому судят о достижении критического динамического уровня жидкости в скважине, причем пороговое значение тока вентильного электродвигателя определяют по стендовым характеристикам с учетом коэффициента плотности реально перекачиваемой жидкости, после определения срыва подачи электронасос переводят в режим ожидания на пониженную частоту вращения, при которой предотвращается перегрев вентильного электродвигателя, на время, достаточное для достижения динамического уровня, при котором насос работает без срыва подачи, по окончании которого частоту вращения электронасоса вновь увеличивают до значения, меньшего, по крайней мере, на заданную величину, чем частота вращения, на которой произошел срыв подачи электронасоса, после чего электронасос переводят в режим работы вблизи критического динамического уровня жидкости в скважине, обеспечивающий максимальный приток.
Использование предлагаемого способа позволяет более точно определять режим работы насоса, обеспечивающий максимальную производительность скважины, в отличие от прототипа, через зависимости:
N=f1(n,M), M=f2(I),
где N, n, M, I - соответственно мощность на валу, частота вращения вала электродвигателя, вращающий момент на валу и ток электродвигателя.
Стендовые характеристики насоса включают, в частности, семейство расходно-напорных характеристик насоса (при испытаниях на стенде роль пластовой жидкости выполняет вода) и соответствующее им семейство токовых характеристик двигателя.
Сущность изобретения поясняется чертежами. На фиг.1 представлена блок-схема частотно-регулируемого привода электронасоса с вентильным электродвигателем, который в совокупности с насосом представляет собой установку, с помощью которой осуществляют способ динамической эксплуатации скважины. В этом способе используется режим сканирования частоты вращения вала электродвигателя. Это позволяет найти режимы работы насоса с максимально возможным притоком пластовой жидкости.
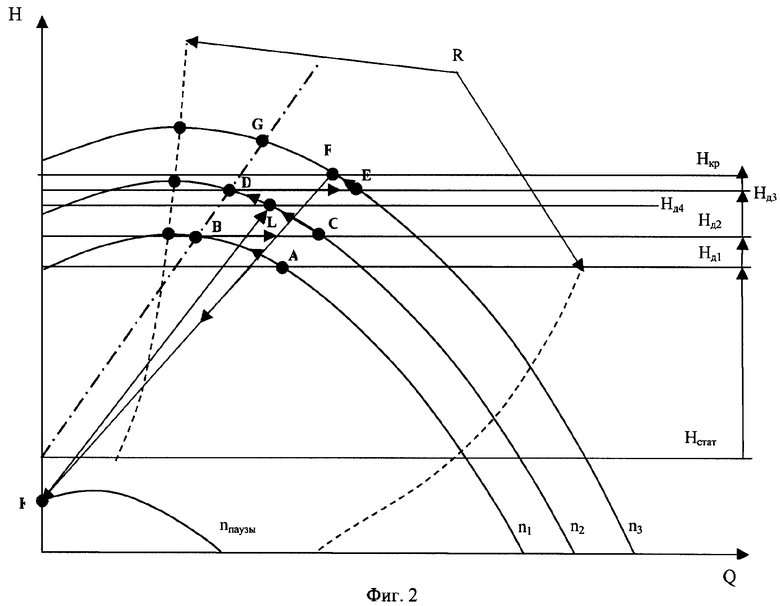
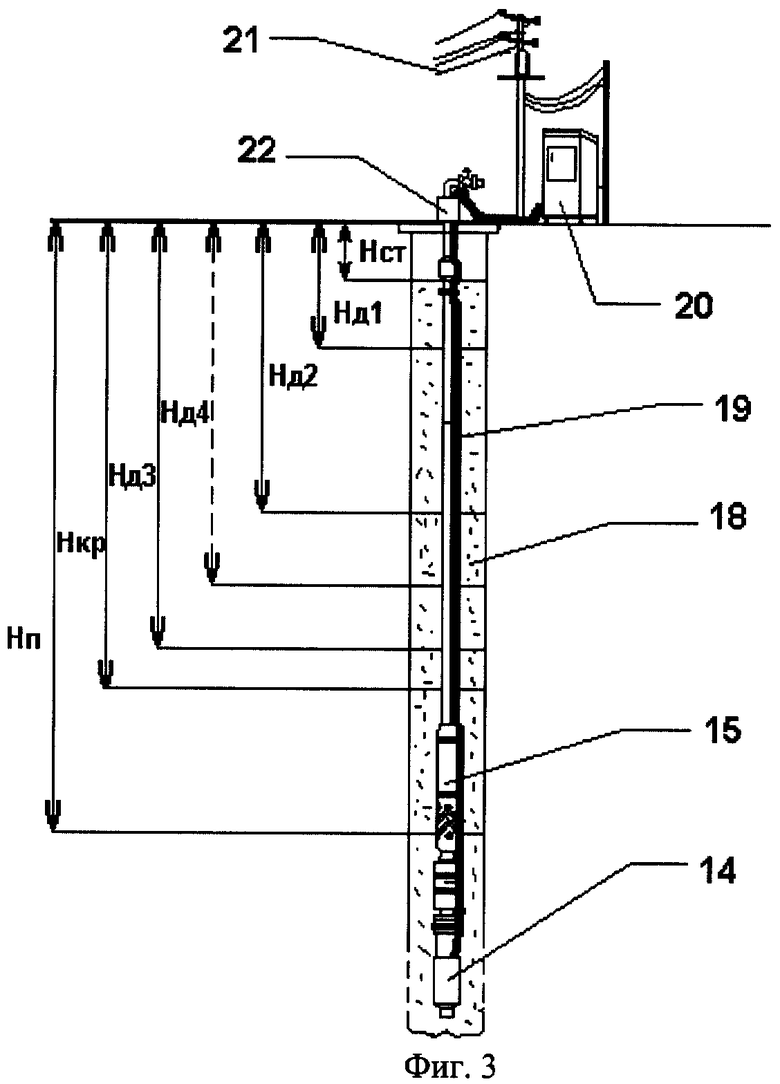
На фиг.2 и фиг.3 разъясняется алгоритм вышеуказанного способа динамической эксплуатации электронасоса с частотно-регулируемым приводом в условиях притока, достаточного для работы в рабочей зоне насоса, с помощью напорно-расходных характеристик насоса, индикаторной диаграммы скважины (фиг.2) и схемы динамических уровней для работающей в скважине насосной установки (фиг.3). Работу алгоритма поясняет фиг.3, где показаны напорно-расходные характеристики насоса на разных частотах вращения (n1, n2, n3 ...). Индикаторная кривая - кривая продуктивности скважины (показана штрихпунктирной линией на фиг.2). Продуктивность скважины (Кпр) считается постоянной.
Схема включает управляющий вычислительный блок 1, содержащий блок интерфейса оператора 2, блок памяти 3 для хранения параметров скважины и установки, например, параметров, касающихся приращения частоты вращения при изменении тока вентильного электродвигателя, блок памяти 4 для хранения архива работы электронасоса, аналого-цифровой преобразователь 5, блок связи 6 управляющего вычислительного блока 1, соединенные с блоком процессора 7 управляющего вычислительного блока 1, и блок измерения 8 времени.
Питание электродвигателя 14 с погружным электронасосом 15 осуществляется через повышающий (высокочастотный) трансформатор 16, соединенный с инвертором 11. Блок датчиков тока 17 соединен с электродвигателем и с аналого-цифровым преобразователем 5 управляющего вычислительного блока 1. Выпрямитель 10 и инвертор 11 образуют силовую часть преобразователя 9 частоты. Блок процессора 13 с блоком связи 12 образуют управляющую часть преобразователя частоты 9.
По представленной схеме можно осуществлять регулировку работы установки для осуществления вышеуказанного способа динамической эксплуатации скважины. Управляющий вычислительный блок 1 через блок связи 6 (по интерфейсу RS-485) задает напряжение преобразователю частоты 9 и контролирует n-текущую частоту вращения вентильного электродвигателя 14 (информация о частоте передается также через блок 12 от преобразователя частоты 9). Частота вращения вентильного электродвигателя 14 определяется частотой напряжения на выходе преобразователя частоты 9.
В процессе работы сигнал с блока 17 датчиков тока поступает в аналого-цифровой преобразователь 5 и далее текущее значение тока Iдв вентильного электродвигателя поступает в блок процессора 7. Блок процессора 7 получает от преобразователя частоты 9 через блок связи 6 текущую частоту вращения и, анализируя базу данных блока памяти 3 с характеристиками установки (токовые и расходно-напорные характеристики), вычисляет требуемую оптимальную частоту вращения погружного электронасоса, учитывая динамику изменения параметров работы всей установки. Затем блок процессора 7 изменяет заданное значение напряжения так, чтобы текущая частота вращения стала равна требуемой, и так далее.
Способ динамической эксплуатации скважины электронасосом с частотно-регулируемым приводом может быть рассмотрен на следующем примере.
В вертикальной скважине 18 находится погружная насосная установка с глубиной подвеса Нп (фиг.3). Глубина подвеса Нп, в случае вертикальной скважины, определяется расстоянием от точки входа пластовой жидкости в насос (например, от входных отверстий газосепаратора насоса 15 до уровня поверхности земли в районе устья скважины 22). Погружная часть насосной установки содержит вентильный двигатель 14, погружной насос 15. Погружная часть насосной установки соединена кабелем 19 со станцией управления 20, содержащей вышеуказанные блоки (фиг 1). Она подключена к сети электропитания 21. Статический уровень скважины (т.е насос не включен) - Нст. R - рабочая зона насоса (границы ее показаны штриховой линией на фиг.2). Считаем продуктивность скважины постоянной, т.е индикаторная кривая не меняется.
Пусть установка начала работать с динамического уровня Нд1 (отсчитывается от уровня поверхности земли до уровня пластовой жидкости) на расчетной частоте вращения n1, полученной при подборе скважины. Вначале установка работает в точке А (фиг.2), в которую она автоматически перешла из вывода на режим или после запуска. Далее установка начнет отслеживать момент стабилизации тока. Эта стабилизация тока указывает на стабилизацию динамического уровня в точке В на уровне Нд2. Точка образована пересечением индикаторной кривой скважины с напорно-расходной характеристикой насоса на частоте n1. Критерием стабилизации является неизменность тока (в диапазоне заданного порога чувствительности изменения тока двигателя) в течение заданного времени, определенного из предыдущего опыта эксплуатации скважин и находящегося в блоке памяти установки. Если же раньше, чем наступит стабилизация, пройдет заданное максимальное время (заранее введенное в базу данных установки), то установка начинает изменять частоту вращения, не дожидаясь стабилизации по току. Происходит повышение частоты вращения на заданное значение (сканирование) до n2 (точка С).
Далее установка повторяет цикл - работает по вышеуказанной схеме - снова фиксируется момент стабилизации динамического уровня Нд3 в точке D и после стабилизации производится очередное сканирование. Установка увеличит частоту, перейдя в точку Е на расходно-напорной кривой, соответствующей частоте n3. После этого установка снова будет стремиться в точку равновесия (точка G), однако она ее не достигнет, так как при движении к ней по расходно-напорной характеристике, соответсвующей частоте n3, при достижении динамического уровня Ндкр при откачке (точка F) начнется разгазирование пластовой жидкости, при этом ток падает ниже значения, соответствующего срыву подачи насоса. В этом случае установка переходит в режим ожидания (точка К) и начинает работать на пониженной частоте вращения nпаузы (при которой предотвращается перегрев двигателя, кроме того, снижается вероятность заклинивания насоса). Когда пройдет предварительно заданное время, установка автоматически выйдет на частоту вращения, соответствующую последней расходно-напорной кривой, на которой она работала еще без срыва подачи, т.е. на n2 в нашем случае (и попадает на точку L, соответвующую уровню Нд4 (расстояние выделено штриховкой на фиг.3, отсчитывается от уровня поверхности земли до уровня пластовой жидкости), причем Нд4<Нд3<Ндкр) и снова будет ждать стабилизации режима в точке D с динамическим уровнем Нд3. Таким образом, установка будет поддерживать режим работы вблизи критического динамического уровня, обеспечивая максимальный приток. Т.к. интервал сканирования задается достаточно большим (несколько суток), а время работы на пониженной частоте малым (несколько десятков минут), то работа в режиме ожидания практически не будет влиять на уровень добычи.
Установка, реализующая указанный способ, прошла испытания на скважине.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОЙ ЭКСПЛУАТАЦИИ СКВАЖИНЫ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 2006 |
|
RU2322571C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 2012 |
|
RU2474675C1 |
| ПОГРУЖНАЯ НАСОСНАЯ УСТАНОВКА ДЛЯ ДОБЫЧИ НЕФТИ | 2009 |
|
RU2429382C1 |
| СПОСОБ ГИДРОДИНАМИЧЕСКИХ ИССЛЕДОВАНИЙ НЕФТЯНЫХ СКВАЖИН, ОБОРУДОВАННЫХ ЭЛЕКТРОЦЕНТРОБЕЖНЫМИ НАСОСАМИ С ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ ТОКА | 2011 |
|
RU2475640C2 |
| Способ оптимизации работы скважины, оборудованной скважинным насосом | 2018 |
|
RU2700149C1 |
| Способ регулирования режима работы скважины, оборудованной установкой электроцентробежного насоса, в системе межскважинной перекачки | 2021 |
|
RU2758326C1 |
| ЭЛЕКТРООБОРУДОВАНИЕ ДЛЯ ПОДЪЕМА ПЛАСТОВОЙ ЖИДКОСТИ НА КУСТЕ СКВАЖИН И СПОСОБ УПРАВЛЕНИЯ ИМ | 2014 |
|
RU2554692C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 2003 |
|
RU2250357C2 |
| Способ регулирования энергопотребления нефтедобывающего скважинного оборудования | 2022 |
|
RU2773403C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ НАСОСНОЙ УСТАНОВКОЙ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ&NBSP;И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2522565C1 |
Изобретение относится к скважинной добыче нефти и может быть использовано для эксплуатации скважин, оборудованных электронасосами, в частности погружными электронасосами с вентильным приводом. Техническим результатом изобретения является повышение эффективности процесса поиска рабочего режима насоса, дающего наибольший дебит скважины за счет исключения измерения давлений в колонне труб. Для этого откачку жидкости производят электронасосом с вентильным электродвигателем (ВЭД). При работе электронасоса в стационарном режиме через заданные интервалы времени, определяемые длительностью переходных процессов в системе пласт-скважина, периодически увеличивают частоту вращения ВЭД на заданную величину, определяемую порогом чувствительности тока ВЭД, до снижения тока ВЭД ниже его порогового значения на данной частоте вращения, соответствующего срыву подачи электронасоса, по которому судят о достижении критического динамического уровня жидкости в скважине. Причем пороговое значение тока ВЭД определяют по стендовым характеристикам с учетом коэффициента плотности реально перекачиваемой жидкости. После определения срыва подачи электронасос переводят в режим ожидания на пониженную частоту вращения для предотвращения перегрева вентильного электродвигателя на время, достаточное для изменения динамического уровня жидкости в скважине, по окончании которого частоту вращения электронасоса вновь увеличивают до значения, меньшего, по крайней мере, на заданную величину, чем частота вращения, на которой произошел срыв подачи электронасоса. После этого электронасос переводят в режим работы вблизи критического динамического уровня жидкости в скважине, обеспечивающий максимальный приток. 3 ил.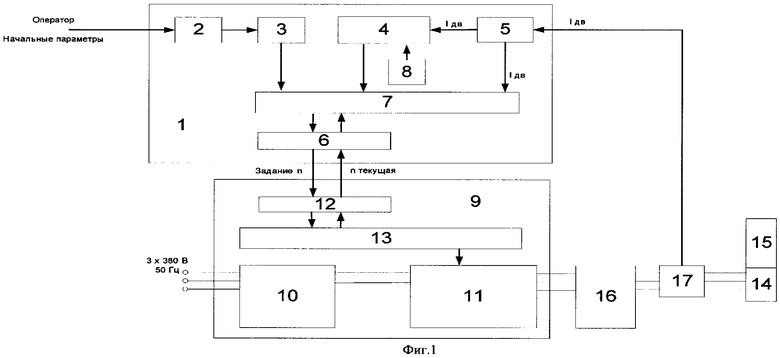
Способ динамической эксплуатации скважины электронасосом с частотно-регулируемым приводом, основанный на периодическом повторении циклов, включающий запуск электронасоса при увеличивающейся частоте питающего напряжения, подачу жидкости электронасосом при заданной частоте вращения, характеризующийся тем, что откачку жидкости производят электронасосом с вентильным электродвигателем, при работе электронасоса в стационарном режиме через заданные интервалы времени, определяемые длительностью переходных процессов в системе "пласт-скважина", периодически увеличивают частоту вращения вентильного электродвигателя на заданную величину, определяемую порогом чувствительности тока вентильного электродвигателя, до снижения тока вентильного электродвигателя ниже его порогового значения на данной частоте вращения, соответствующего срыву подачи электронасоса, по которому судят о достижении критического динамического уровня жидкости в скважине, причем пороговое значение тока вентильного электродвигателя определяют по стендовым характеристикам с учетом коэффициента плотности реально перекачиваемой жидкости, после определения срыва подачи электронасос переводят в режим ожидания на пониженную частоту вращения, при которой предотвращается перегрев вентильного электродвигателя, на время, достаточное для достижения динамического уровня, при котором насос работает без срыва подачи, по окончании которого частоту вращения электронасоса вновь увеличивают до значения, меньшего, по крайней мере, на заданную величину, чем частота вращения, на которой произошел срыв подачи электронасоса, после чего электронасос переводят в режим работы вблизи критического динамического уровня жидкости в скважине, обеспечивающий максимальный приток.

