Относится к измерительной технике и предназначен для измерения магнитной индукции (напряженности) переменных магнитных полей.
Известен способ расширения полосы пропускания преобразователя магнитной индукции с использованием секционированной катушки в сочетании с суммирующим параллельным каскадом (Труды ПНИИЭП, вып.17 "Расчет и конструирование электроизмерительных приборов", 1973, с.114-121).
Наиболее близким к предлагаемому преобразователю является измеритель напряженности переменного магнитного поля по а.с. СССР №667921, М.кл2 G01R 33/02, приор. 4.01.76 г., опубл. 15.06.79 г. В этом измерителе напряжение, пропорциональное напряженности переменного магнитного поля (магнитной индукции) - сигнал, - разделяют на n частей путем приема его на индукционную катушку, разделенную на n секций. Сигнал от каждой секции подается через два апериодических звена первого порядка и фильтр нижних частот на вход параллельного сумматора (суммирующего операционного усилителя). Каждая секция индукционной катушки совместно со своими двумя апериодическими звеньями и фильтром нижних частот преобразует напряженность переменною магнитного поля в своем определенном диапазоне частот. Напряжение с выходов фильтров нижних частот поступает на сумматор, где происходит суммирование аналоговых сигналов для последующего их регистрирования в расширенном диапазоне частот.
Измеритель напряженности магнитного поля содержит катушку, состоящую из n секций, выходы каждой секции последовательно присоединены к сумматору через два апериодических звена первого порядка с разными постоянными времени и фильтр нижних частот. Он является ближайшим аналогом предлагаемых индукционных преобразователей магнитного поля. При способе расширения полосы пропускания, реализованном в этом имерителе, напряжения помех, поступающие с каждой секции, в том числе и наведенные через емкость, суммируются в фазе.
Ставится задача разработки индукционного преобразователя магнитного поля, минимизирующего влияние помех, с более широкой полосой пропускания и большей помехоустойчивостью.
Для решения этой задачи предлагается преобразователь, содержащий следующие элементы: секционированную катушку, или набор несекционированных катушек, или сочетание этих устройств. Для суммирования сигналов с этих устройств используется сложный сумматор, который содержит два параллельных сумматора, выходы которых подключены к противоположным по знаку входам третьего сумматора. При этом первая половина секций секционированных катушек и/или первая половина несекционированных катушек включена в исходной полярности, а вторая половина секций и катушек включена с инверсией, причем каждый элемент из первой половины имеет идентичный во второй половине, выходы элементов из первой половины подключены ко входам первого параллельного сумматора, а выходы элементов из второй половины подключены ко входам второго параллельного сумматора.
Инверсное включение приводит к тому, что взаимная индукция каждой пары элементов (один из которых включен в исходной полярности, а другой в противоположной) отрицательна, т.е. общая индуктивность системы уменьшается, а резонансная частота увеличивается, что приводит к расширению полосы пропускания. Кроме того, при этом компенсируются наводимые емкостные помехи.
Этот способ расширения полосы пропускания может быть также использован при разработке более сложного комбинированного индукционного преобразователя, в котором применен такой же сумматор, как в предыдущем случае, описанные выше преобразователи используются в качестве первичных преобразователей вместо набора секционированных или несекционированных катушек. При этом первая половина преобразователей включена в исходной полярности, а вторая половина включена с инверсией, причем каждый элемент из первой половины имеет идентичный во второй половине, выходы элементов из первой половины подключены ко входам первого параллельного сумматора, а выходы элементов из второй половины подключены ко входам второго параллельного сумматора. Выходы этих двух сумматоров подключены к противоположным по знаку входам третьего сумматора.
Поскольку каждый преобразователь имеет отдельный сердечник, их можно считать независимыми источниками шума, а в этом случае уровень шума уменьшается в число, равное корню квадратному из числа преобразователей. В этом случае также присутствуют преимущества, возникающие при инверсном включении половины элементов, т.е. расширение полосы пропускания (хотя оно меньше, чем в случае общего сердечника) и компенсация емкостных помех.
На фиг.1 приведен пример схемы индукционного преобразователя, содержащего секционированную индукционную катушку.
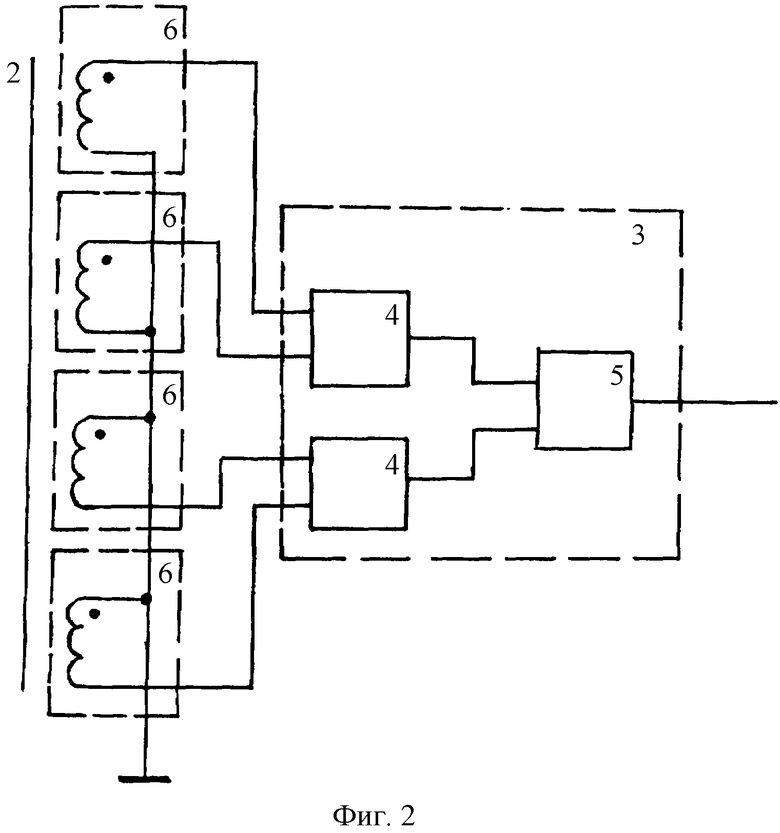
На фиг.2 - пример схемы индукционного преобразователя, содержащего несекционированные индукционные катушки.
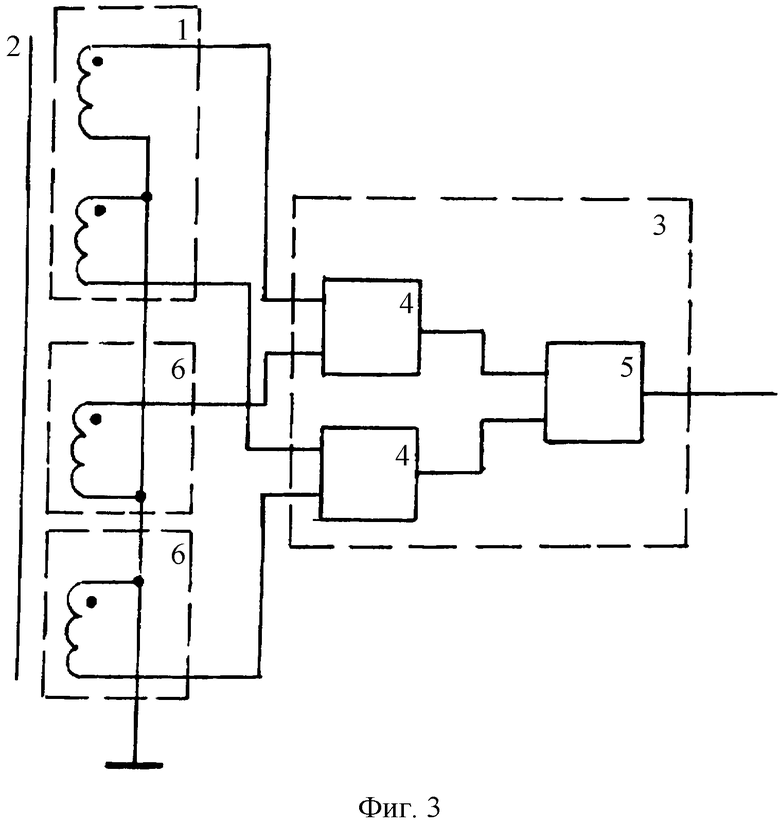
На фиг.3 - пример схемы индукционного преобразователя, содержащего секционированные и несекционированные индукционные катушки.
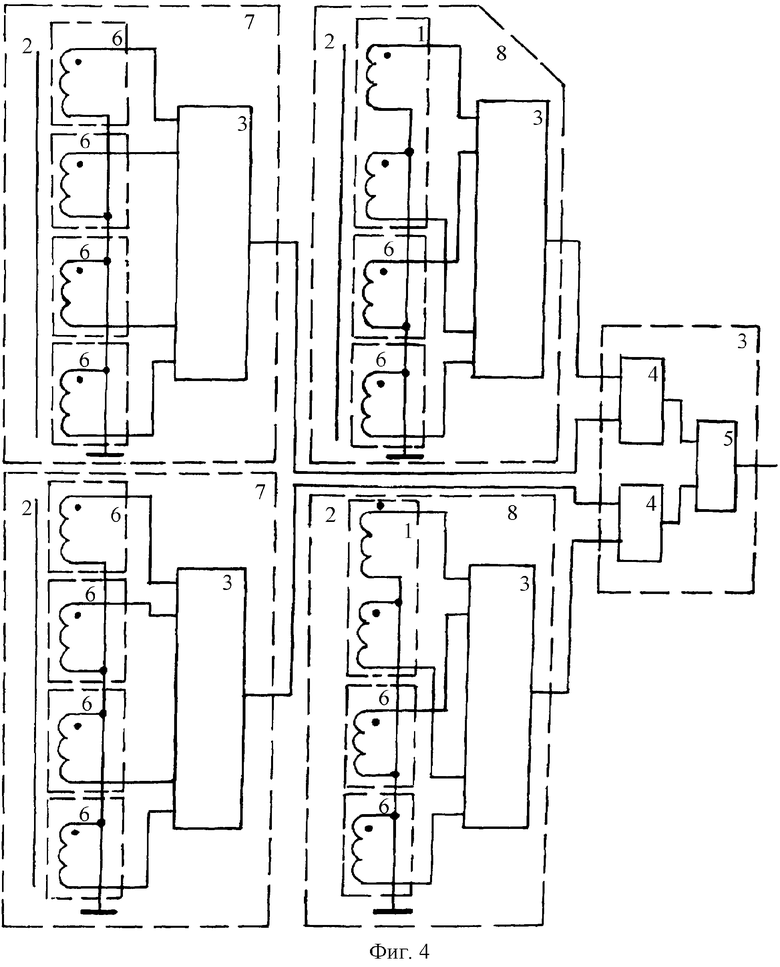
на фиг.4 - пример схемы комбинированного индукционного преобразователя, содержащего индукционные преобразователи.
Первый вариант индукционного преобразователя магнитного поля включает секционированную индукционную катушку 1, сердечник 2, суммирующее устройство 3, два параллельных сумматора 4, сумматор 5. Прямые выходы половины секций катушки соединены со входами одного из сумматоров 4. Инвертированные выходы другой половины секций катушки соединены со входами другого сумматора 4. Выходы сумматоров 4 соединены со входами сумматора 5. В качестве примера на фиг.1 приведена схема преобразователя, содержащего катушку, состоящую их четырех секций. Из них две включены без инверсии, а две других с инверсией.
Сигналы с прямых и инвертированных выходов секций суммируются по отдельности на сумматорах 4. Результаты этого суммирования складываются на сумматоре 5 с учетом знака. На выходе сумматора 5 должна получиться сумма сигналов от отдельных секций катушки 1, как если бы половина из них не была проинвертирована. В приведенном примере сигналы с выходов сумматоров 4 подаются на разнополярные входы сумматора 5.
В результате инверсного включения половины секций взаимная индукция каждой пары секций, включенных встречно, отрицательна, т.е. общая индуктивность системы уменьшается, а резонансная частота увеличивается, что приводит к расширению полосы пропускания относительно системы, в которой все секции включены согласно. Кроме того, помехи, пришедшие по электрическому полю через паразитные емкости на незаземленные концы секций, оказываются одного знака (вне зависимости направления включения). На выходе сумматора 5 они компенсируются.
Второй вариант индукционного преобразователя магнитного поля включает несекционированные индукционные катушки 6, размещенные на общем сердечнике 2, суммирующее устройство 3, два параллельных сумматора 4, сумматор 5. Прямые выходы половины катушек соединены со входами одного из сумматоров 4. Инвертированные выходы другой половины катушек соединены со входами другого сумматора 4. Выходы сумматоров 4 соединены со входами сумматора 5. В качестве примера на фиг.2 приведена схема преобразователя, содержащего четыре катушки. Из них две включены без инверсии, а две других с инверсией.
В этом варианте преобразователя индукционные катушки выполняют ту же роль, что отдельные секции индукционной катушки в предыдущем варианте.
Третий вариант индукционного преобразователя магнитного поля включает секционированную индукционную катушку 1, несекционированные индукционные катушки 6, размещенные на общем сердечнике 2, суммирующее устройство 3, два параллельных сумматора 4, сумматор 5. В качестве примера на фиг.3 приведена схема преобразователя, содержащего секционированную катушку, содержащую две секции и две несекционированные катушки. Прямые выходы одной из секций секционированной катушки и одной из несекционированных катушек соединены со входами одного из сумматоров 4. Инвертированные выходы другой секции секционированной катушки и другой несекционированной катушки соединены со входами другого сумматора 4. Выходы сумматоров 4 соединены со входами сумматора 5.
Этот вариант является сочетанием первого и второго вариантов.
Комбинированный индукционный преобразователь, представленный в качестве примера на фиг.4, содержит индукционные преобразователи 7, выполненные на несекционированных индукционных катушках (второй вариант преобразователя - фиг.2) и индукционные преобразователи 8, включающие каждый секционированную катушку и несекционированные катушки (третий вариант преобразователя - фиг.3) и суммирующее устройство 3, аналогичное описанному выше, содержащее два параллельных сумматора 4 и сумматор 5. Выходы одного из преобразователей 7 и одного из преобразователей 8 соединены со входами одного из сумматоров 4. Чтобы получить инвертированные сигналы от других преобразователей 7 и 8 в данном примере их достаточно разместить вблизи первых преобразователей 7 и 8, параллельно им с поворотом на 180°. Выходы вторых преобразователей 7 и 8 соединены со входами другого сумматора 4. Выходы сумматоров 4 соединены со входами сумматора 5. Можно получить инвертированные сигналы от второй пары преобразователей и другими способами, например использовав инверсное включение катушек внутри преобразователей или поставив дополнительные инверторы на их выходе. Видно, что в качестве преобразователей 7 и 8 могут быть использованы преобразователи, выполненные по любому из трех вышеописанных вариантов в различных сочетаниях. Число преобразователей может быть любым при условии, что они попарно идентичны.
Выбор варианта определяется требуемой шириной полосы пропускания при заданном коэффициенте преобразования. В различных вариантах будут различные величины взаимной индукции между отдельными секциями и/или катушками и, соответственно, различные резонансные частоты, которые определяют ширину полосы пропускания. Поскольку коэффициент преобразования определяется количеством витков, подбором конструкции и взаимного расположения секций и/или катушек и количества витков можно достигнуть нужных характеристик.
Во всех приведенных примерах для простоты использовано по две пары преобразовательных элементов, однако из описания понятно, что их число может быть любым.
Если имеется готовый преобразователь с нечетным числом элементов, элемент, не имеющий пары, может быть соединен с одним из входов сумматора 5.
Был изготовлен и испытан преобразователь магнитной индукции в соответствии с первым вариантом (фиг.1). Он содержал индукционную катушку, разделенную на 4 секции. Индуктивность каждой секции составляла 36 мГн. При суммировании сигналов от каждой секции без инвертирования полоса пропускания на уровне 0,7 составляла 70 кГц. При суммировании по предлагаемому способу (2 секции из четырех включены с инверсией) полоса пропускания на уровне 0,7 составляла 84 кГц. Измеренное напряжение емкостной помехи на частоте 41,5 Гц на каждой секции составляло 0,3 мВ. При суммировании без инвертирования на выходе датчика помеха составляла 1,2 мВ. При суммировании по предлагаемому способу напряжение емкостной помехи на выходе датчика составляло 0,1 мВ.
Преобразователь магнитной индукции в соответствии со вторым вариантом (фиг.2) содержал 4 индукционные катушки, индуктивность каждой из которых составляла 360 мГн. При суммировании сигналов от каждой катушки без инвертирования полоса пропускания на уровне 0,7 составляла 30 кГц. При суммировании по предлагаемому способу (2 катушки из четырех включены с инверсией) полоса пропускания на уровне 0,7 составляла 40 кГц. Измеренное напряжение емкостной помехи на частоте 41,5 Гц на каждой катушке составляло 1,2 мВ. При суммировании без инвертирования на выходе датчика помеха составляла 4,8 мВ. При суммировании по предлагаемому способу напряжение емкостной помехи на выходе датчика составляло 0,3 мВ.
Преобразователь магнитной индукции в соответствии с третьим вариантом (фиг.3) содержал катушку из 2-х секций индуктивностью 150 мГн каждая и 2 несекционированные индукционные катушки, индуктивность каждой из которых составляла 360 мГн. При суммировании сигналов от всех элементов без инвертирования полоса пропускания на уровне 0,7 составляла 25 кГц. При суммировании по предлагаемому способу (1 секция секционированной катушки и 1 несекционированная катушка включены с инверсией) полоса пропускания на уровне 0,7 составляла 32 кГц. Измеренное напряжение емкостной помехи на частоте 41,5 Гц на каждой секции составляло 0,75 мВ, а на каждой катушке 1,2 мВ. При суммировании без инвертирования на выходе датчика помеха составляли 3,9 мВ. При суммировании по предлагаемому способу напряжение емкостной помехи на выходе датчика составляло 0,39 мВ.
Был также изготовлен и испытан комбинированный преобразователь магнитной индукции (фиг.4). Он содержал 2 преобразователя, изготовленных в соответствии со вторым вариантом (фиг.2, полоса пропускания 40 кГц) и 2 преобразователя в соответствии с третьим вариантом (фиг.3, полоса пропускания 32 кГц). При суммировании сигналов от каждого преобразователя без инвертирования полоса пропускания составляла 41 кГц, а при суммировании по предлагаемому способу (один из каждой пары одинаковых преобразователей включен с инвертированием, т.е. размещен параллельно другому с поворотом на 180°) она составила 44,5 кГц. Напряжения емкостных помех от датчиков второго и третьего вариантов составляли 0,3 мВ и 0,4 мВ соответственно. При суммировании без инверсии общая помеха комбинированного преобразователя составляла 1,4 мВ. При включении преобразователей по предлагаемому способу напряжение емкостной помехи составило 0.14 мВ.
Приведенные примеры показывают, что инвертирование сигналов от половины элементов преобразователя магнитной индукции с последующим суммированием с учетом знака сигналов от всех элементов позволяет дополнительно расширить полосу пропускания и уменьшить напряжения помех, наведенных через емкость. Соответственно преобразователи магнитной индукции имеют существенно более широкую полосу пропускания и меньше подвержены влиянию помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь для измерения остаточной магнитной индукции движущихся поперечно намагниченных постоянных магнитов | 1990 |
|
SU1800412A1 |
| Устройство для воспроизведения заданных значений магнитной индукции | 1982 |
|
SU1087943A1 |
| Устройство для измерения напряженности переменного магнитного поля | 1986 |
|
SU1576877A1 |
| Устройство для воспроизведения за-дАННыХ зНАчЕНий МАгНиТНОй иНдуКции | 1978 |
|
SU811187A1 |
| Измеритель напряженности переменного магнитного поля | 1981 |
|
SU1002993A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНДУКЦИИ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ | 2000 |
|
RU2178570C1 |
| Феррометр для тонких магнитных пленок | 2022 |
|
RU2795378C1 |
| Измеритель напряженности переменного магнитного поля | 1976 |
|
SU667921A1 |
| ПРИЁМНОЕ УСТРОЙСТВО ДЛЯ ШИРОКОПОЛОСНОЙ РАДИОСИСТЕМЫ | 2022 |
|
RU2827301C2 |
| Измеритель переменной магнитной индукции | 1978 |
|
SU746357A1 |
Изобретение относится к измерительной технике и предназначено для измерения магнитной индукции (напряженности) переменных магнитных полей. В преобразователе магнитной индукции для суммирования используется сложный сумматор, который содержит два параллельных сумматора, выходы которых подключены к противоположным по знаку входам третьего сумматора, а для деления сигнала используются или секционированная катушка, или набор несекционированных катушек, или сочетание этих устройств. При этом первая половина секций секционированных катушек и/или первая половина несекционированных катушек включена в исходной полярности, а вторая половина секций и катушек включена с инверсией, причем каждый элемент из первой половины имеет идентичный во второй половине, выходы элементов из первой половины подключены ко входам первого параллельного сумматора, а выходы элементов из второй половины подключены ко входам второго параллельного сумматора. В комбинированном индукционном преобразователе применен такой же сумматор, как в предыдущем случае, а описанные выше преобразователи используются в качестве первичных преобразователей вместо набора катушек. Технический результат: расширение полосы пропускания индукционного преобразователя магнитного поля и минимизация помех. 4 н.п. ф-лы, 4 ил.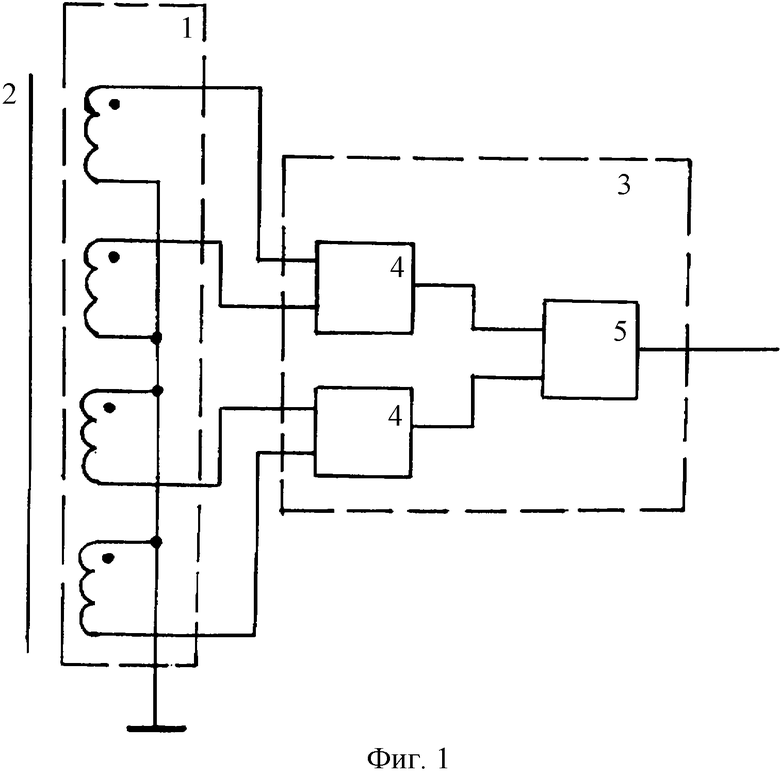
| Измеритель напряженности переменного магнитного поля | 1976 |
|
SU667921A1 |
| Устройство для контроля магнитной проницаемости | 1980 |
|
SU883827A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНДУКЦИИ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ | 2000 |
|
RU2178570C1 |
| RU 2071098 C1, 27.12.1996 | |||
| US 5831432 A1, 03.11.1998 | |||
| JP 9311166 A, 02.12.1997. | |||

