Изобретение относится к горному делу и предназначено для открытой разработки россыпных месторождений.
Известен способ разработки россыпи стационарным башенным экскаватором, машинная башня которого устанавливалась на фундаменте и укреплялась растяжками. Перемещение ковша для подачи породы на переработку осуществлялось двухбарабанной лебедкой [1].
Данный способ не обеспечивает эффективную подготовку породы повышенной прочности и глинистости к переработке и не может использоваться на объектах со сложными физико-механическими характеристиками.
Известны способы открытой разработки полезных ископаемых с использованием дражного оборудования [2].
Данные способы не пригодны при большой валунистости, крепкой сцементированности породы и для высокопластичных глин.
Известен гидравлический способ разработки россыпей, включающий предварительную подготовку нарезной канавы, механическое разрушение и гидроразмыв породы в забое, выгонку и направление породы в нарезную канаву, безнапорное транспортирование породы со свободным размоканием ее в процессе транспортирования [3].
Данный способ не эффективен при разработке сцементированной породы или породы с повышенной пластичностью.
Наиболее близкими по технической сущности являются геотехнологические комплексы с многоступенчатой дезинтеграцией, включающие модуль предварительного механического или гидравлического рыхления, модуль дезинтеграции, установленный ниже системы безнапорного гидротранспортирования размытой породы, системы транспортирования, систему отвалообразования, перерабатывающий комплекс [4, 5, 6].
Данные комплексы имеют повышенную трудоемкость при эксплуатации и менее эффективны при переработке породы с большим содержанием известняка и песчаника.
Технический результат - повышение эффективности добычи полезных ископаемых путем интенсификации процесса разрушения породы со сложными физико-механическими свойствами при разработке россыпей.
Технический результат достигается тем, что в геотехнологическом комплексе для разработки золотосодержащих россыпей, включающем модуль предварительного механического разрушения и гидроразмыва породы в забое с направляющими щитами, модуль дезинтеграции, расположенный ниже уровня нарезной канавы для гидротранспортирования породы, перерабатывающий комплекс с системами гидротранспортирования и систему отвалообразования пустой породы, модуль дезинтеграции снабжен жестко закрепленной на опорах эстакадой и двумя механическими дезинтеграторами, при этом поперечина эстакады снабжена ориентированной по ее центру и шарнирно закрепленной на ней с возможностью перемещения посредством опор качения платформой, а платформа снабжена приводом ее поворота, шарнирно закрепленным на платике, жестко связанным с поперечиной эстакады, при этом механические дезинтеграторы снабжены рыхлителями, выполненными с возможностью вращения вокруг осей и перемещения в горизонтальных и вертикальных плоскостях, при этом приводы вращения механических дезинтеграторов установлены на дополнительных основаниях и связаны посредством рычагов с пазами осей рыхлителей, а оси рыхлителей, посредством шарнирных связей с вилками приводов перемещения рыхлителей в вертикальных плоскостях установлены с возможностью телескопического перемещения относительно связей приводов перемещения рыхлителей в горизонтальных плоскостях, при этом связи приводов перемещения рыхлителей в горизонтальных плоскостях снабжены скользящими опорами, входящими во взаимодействие с направляющими, жестко связаны с приводами перемещения рыхлителей в вертикальных плоскостях и дополнительными основаниями приводов вращения и выполнены с продольными пазами для перемещения вилок приводов перемещения рыхлителей в вертикальных плоскостях, а механические дезинтеграторы снабжены датчиками фиксации физико-механического состояния породы, связанными с автоматической системой управления дезинтеграцией, и консолями, при этом консоль одного механического дезинтегратора жестко соединена с платформой, а консоль другого механического дезинтегратора шарнирно закреплена на оси платформы с возможностью перемещения относительно платформы.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Геотехнологический комплекс для разработки золотосодержащих россыпей изображен на чертежах.
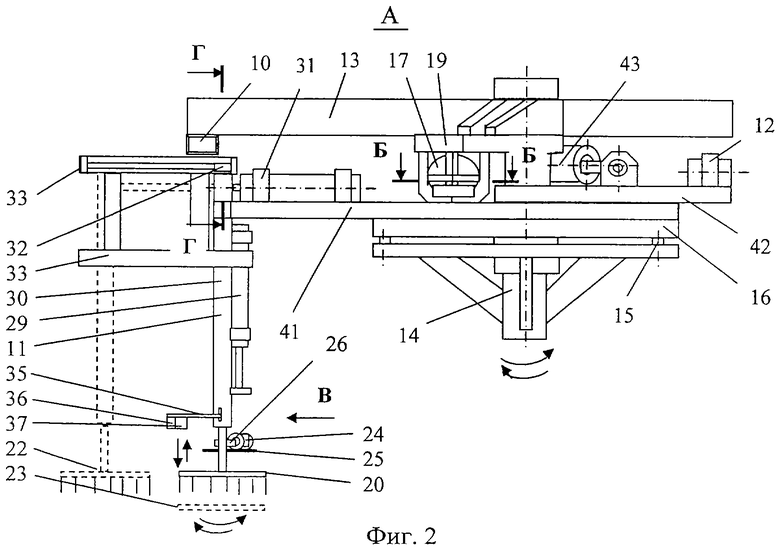
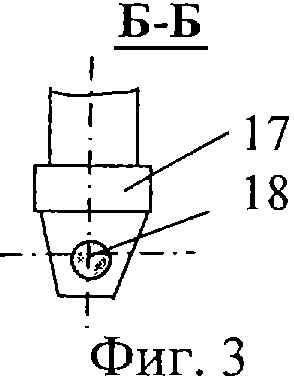
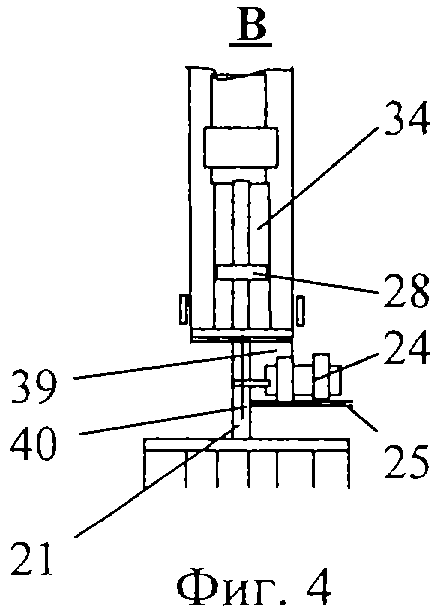
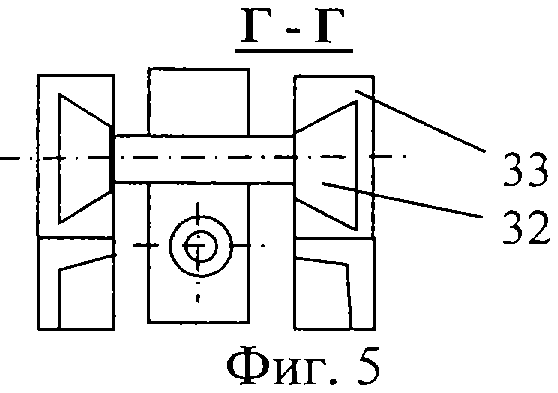
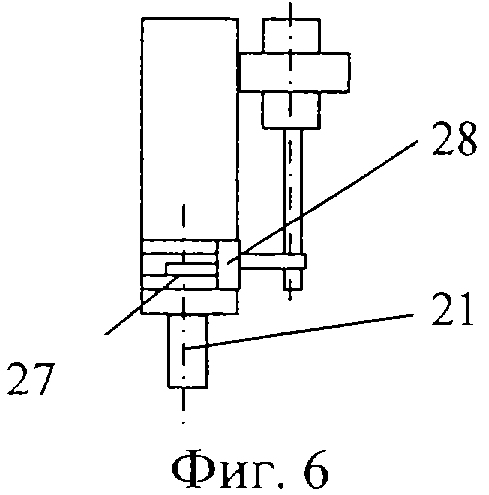
На фиг.1 - общий вид геотехнологического комплекса; на фиг.2 - вид А на фиг.1; на фиг.3 - разрез Б-Б на фиг.2, показано шарнирное соединение привода поворота платформы; на фиг.4 - вид В на фиг.2; на фиг.5 - разрез Г-Г на фиг.2, показаны скользящие опоры, входящие во взаимодействие с направляющими; на фиг.6 - показано шарнирное соединение оси рыхлителей с вилкой привода перемещения рыхлителей в вертикальной плоскости.
Геотехнологический комплекс для разработки золотосодержащих россыпей содержит модуль 1 предварительного механического разрушения и гидроразмыва породы в забое 2 с направляющими щитами 3, модуль дезинтеграции 4, расположенный ниже уровня нарезной канавы 5 для гидротранспортирования породы, перерабатывающий комплекс 6 с системами гидротранспортирования 7 и систему отвалообразования 8 пустой породы. Модуль дезинтеграции 4 снабжен жестко закрепленной на опорах 9 эстакадой 10 и двумя механическими дезинтеграторами 11, 12. Поперечина 13 эстакады 10 имеет ориентированную по ее центру и шарнирно закрепленную на оси 14 с возможностью перемещения посредством опор качения 15 платформу 16. Платформа 16 снабжена приводом 17 ее поворота, который шарнирно 18 закреплен на платике 19. Платик 19 жестко связан с поперечиной 13 эстакады 10. Механические дезинтеграторы 11, 12 снабжены рыхлителями 20, которые выполнены с возможностью поворота вокруг осей 21 и перемещения в горизонтальных 22 и вертикальных плоскостях 23. Приводы вращения 24 механических дезинтеграторов 11, 12 установлены на дополнительных основаниях 25 и связаны посредством рычагов 26 с осями 21 рыхлителей 20. Оси 21 рыхлителей 20 шарнирно 27 связаны с вилками 28 приводов 29 перемещения рыхлителей 20 в вертикальных плоскостях 23 и установлены с возможностью телескопического перемещения относительно связей 30 приводов 31 перемещения рыхлителей 20 в горизонтальных плоскостях 22. Связи 30 приводов 31 снабжены скользящими опорами 32, которые входят во взаимодействие с направляющими 33. Приводы 29 перемещения рыхлителей 20 в вертикальных плоскостях 23 установлены на связях 30 жестко. Связи 30 выполнены с продольными пазами 34 для перемещения вилок 28 приводов 29. На связях 30 механических дезинтеграторов 11, 12 посредством штанг 35 закреплены датчики 36, 37 фиксации физико-механического состояния породы. Датчики 36, 37 связаны с автоматической системой управления дезинтеграцией 38. Дополнительные основания 25 жестко соединены посредством косынок 39 со связями 30 приводов 31. Рычаги 26 приводов вращения 24 входят во взаимодействие с пазами 40 осей 21 рыхлителей 20. Механические дезинтеграторы 11,12 имеют независимую друг от друга систему позиционирования. Механический дезинтегратор 11 размещается на консоли 41, которая жестко соединена с платформой 16. А консоль 42 механического дезинтегратора 12 шарнирно закреплена на оси 14 платформы 16 с возможностью перемещения относительно платформы 16 посредством привода 43, установленного на платформе 16.
Геотехнологический комплекс для разработки золотосодержащих россыпей работает следующим образом.
Осуществляют предварительную подготовку нарезной канавы 5 для гидротранспортирования породы и котлована для модуля дезинтеграции 4. Котлован модуля дезинтеграции 4 расположен ниже уровня нарезной канавы 5 для гидротранспортирования породы. Производят предварительное механическое разрушение и гидроразмыв породы в забое 2 модуля 1, выгонку и направление породы в нарезную канаву 5 с помощью направляющих щитов 3 и других механизмов. По нарезной канаве 5 осуществляется безнапорное гидротранспортирование породы. С поступлением породы в котлован модуля дезинтеграции 4 и заполнением его на определенный уровень происходит исследование и фиксация физико-механического состояния породы - крупность и прочность твердых фракций, и степень дезинтегрированности породы в воде посредством датчиков 36, 37, установленных на штанге 35 и связанных с автоматической системой управления дезинтеграцией 38. Программным устройством автоматической системы управления дезинтеграцией 38 задается порядок и схема работы механических дезинтеграторов 11. После установления размерных параметров позиционирования и физических характеристик критических зон с повышенной концентрацией породы высокой крупности и повышенных прочностных свойств подается команда на шарнирно 18 закрепленный на платике 19 привод 17 поворота платформы 16 для установления рыхлителя 20 механического дезинтегратора 11 над критической зоной модуля дезинтеграции 4. Платформа 16, ориентированная по центру поперечины 13, жестко закрепленной на опорах 9 эстакады 10, посредством шарнира оси 14 и опор качения 15 поворачивает на заданный угол консоль 41 с механическим дезинтегратором 11. Подается команда на привод 43, и консоль 42 механического дезинтегратора 12 поворачивается на оси 14 и позиционируется на заданный угол над второй критической зоной. Задается порядок и схема включения в работу приводов 31 перемещения рыхлителей 20 в горизонтальных плоскостях 22, приводов 29 перемещения рыхлителей 20 в вертикальных плоскостях 23 и приводов вращения 24 механических дезинтеграторов 11. Установление приводов вращения 24 механических дезинтеграторов 11 на дополнительные основания 25, закрепленные посредством косынок 39 на связях 30 приводов 31, позволяет совмещать вращение и перемещение рыхлителей 20 в вертикальных плоскостях 23. С помощью приводов 31 перемещения рыхлителей 20 и посредством связей 30, соединенных со штоками приводов 31, скользящих опор 32 и направляющих 33 механические дезинтеграторы 11,12 ориентируются на определенную величину смещения в горизонтальных плоскостях 22. С помощью приводов 29 перемещения рыхлителей 20 в вертикальных плоскостях 23, шарнирных связей 27 осей 21 с вилками 28, пазов 40 и продольных пазов 34 механические дезинтеграторы 11, 12 ориентируются на определенную глубину погружения. На заданное время включаются установленные на дополнительных основаниях 25 и связанные посредством рычагов 26 с осями 21 рыхлителей 20 приводы вращения 24 механических дезинтеграторов 11, 12. После произведенной дезинтеграции датчиками 36, 37 фиксируется изменение физико-механического состояния породы, контроль параметров и внесение изменений в программу автоматической системы управления дезинтеграцией 38. При необходимости производятся дополнительные периодические перемещения рыхлителей 20 в вертикальных плоскостях 23, в том числе в сочетании с вращением механических дезинтеграторов 11 или с чередованием действий вращения и перемещения в вертикальных плоскостях 23. Осуществляется последующий контроль физико-механического состояния породы в данной зоне и при необходимости переключение порядка работы на следующие зоны. Цикл повторяется. Механические дезинтеграторы могут работать синхронно и асинхронно. Дезинтегрированная пульпа накапливается со стороны системы гидротранспортирования 7 и подается на перерабатывающий комплекс 6 с системой отвалообразования пустой породы 8.
Геотехнологический комплекс для разработки золотосодержащих россыпей повышает эффективность добычи полезных ископаемых посредством интенсификации процесса разрушения и подготовки породы к дальнейшей переработке.
Источники информации
1. Шорохов С.М. Технология и комплексная механизация разработки россыпных месторождений. Изд. 2-е перераб. и доп. М., Недра, 1973, с.258, рис.80.
2. Справочник по разработке россыпей. Под общей редакцией В.П.Березина, В.Г.Лешкова, Л.П.Мацуева, С.В.Потемкина. М., Недра, 1973, с.177, рис.39.
3. Справочник по разработке россыпей. Под общей редакцией В.П.Березина, В.Г.Лешкова, Л.П.Мацуева, С.В.Потемкина. М., Недра, 1973, с.347, рис.94.
4. Хрунина Н.П., Мамаев Ю.А. и др. Геотехнологический комплекс с многоступенчатой дезинтеграцией: Патент RU 2209678, МПК В03В 5/00, Е21С 41/26, 10.08.03, Бюл. №22 (прототип).
5. Хрунина Н.П., Мамаев Ю.А. и др. Геотехнологический комплекс с многоступенчатой дезинтеграцией: Патент RU 2209974, МПК Е21С 41/30, В03В 5/00, 10.08.03, Бюл. №22 (прототип).
6. Хрунина Н.П. Геотехнологический комплекс с многоступенчатой дезинтеграцией: Патент RU 2206403, МПК В03В 5/00, Е21С 41/26, 20.06.03, Бюл. №27 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ЗОЛОТОСОДЕРЖАЩИХ РОССЫПЕЙ | 2006 |
|
RU2325530C1 |
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ЗОЛОТОСОДЕРЖАЩИХ РОССЫПЕЙ | 2006 |
|
RU2325532C1 |
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ЗОЛОТОСОДЕРЖАЩИХ РОССЫПЕЙ | 2006 |
|
RU2325531C1 |
| СПОСОБ РАЗРАБОТКИ РОССЫПЕЙ И ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327039C1 |
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС С МНОГОСТУПЕНЧАТОЙ ДЕЗИНТЕГРАЦИЕЙ | 2002 |
|
RU2209678C1 |
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС С МНОГОСТУПЕНЧАТОЙ ДЕЗИНТЕГРАЦИЕЙ | 2002 |
|
RU2206403C1 |
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС С АЭРОГИДРОДИНАМИЧЕСКОЙ АКТИВАЦИЕЙ | 2007 |
|
RU2343005C1 |
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС С МНОГОСТУПЕНЧАТОЙ ДЕЗИНТЕГРАЦИЕЙ | 2002 |
|
RU2209974C1 |
| ДРАЖНЫЙ ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ ПОПУТНОЙ ОТРАБОТКИ ТЕРРАСОВЫХ РОССЫПЕЙ | 2007 |
|
RU2345223C1 |
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС С ГИДРОДИНАМИЧЕСКИМ И ЛАЗЕРНЫМ ИНИЦИИРОВАНИЕМ | 2007 |
|
RU2343004C1 |
Изобретение относится к горному делу и предназначено для открытой разработки россыпных месторождений. Техническим результатом является повышение эффективности добычи полезных ископаемых путем интенсификации процесса разрушения породы со сложными физико-механическими свойствами при разработке россыпей. Геотехнологический комплекс обеспечивает разрушение породы повышенной прочности с помощью автоматической системы управления дезинтеграцией. Комплекс снабжен жестко закрепленной на опорах эстакадой и механическими дезинтеграторами. Поперечина эстакады снабжена ориентированной по ее центру и шарнирно закрепленной на ней с возможностью перемещения посредством опор качения платформой, а механические дезинтеграторы имеют независимую друг от друга систему позиционирования. 6 ил.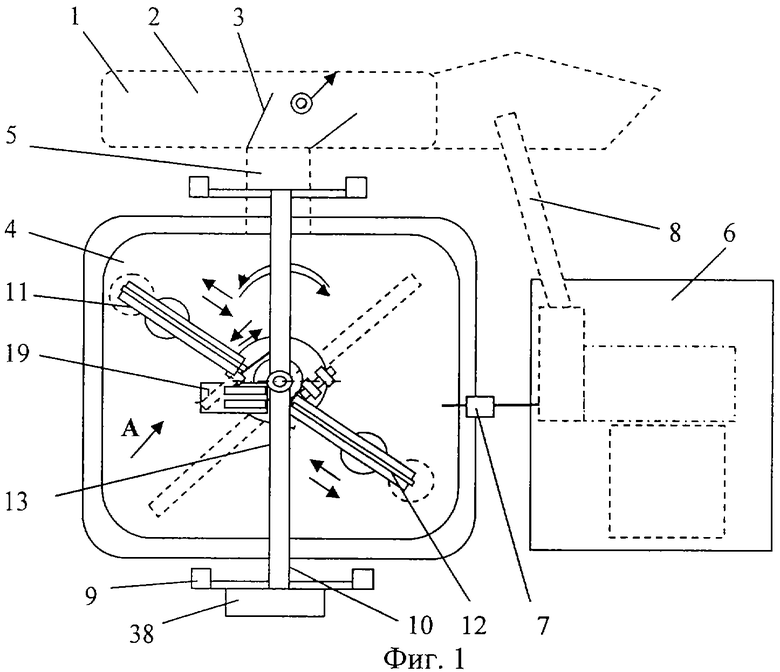
Геотехнологический комплекс для разработки золотосодержащих россыпей, включающий модуль предварительного механического разрушения и гидроразмыва породы в забое с направляющими щитами, модуль дезинтеграции, расположенный ниже уровня нарезной канавы для гидротранспортирования породы, перерабатывающий комплекс с системами гидротранспортирования и систему отвалообразования пустой породы, отличающийся тем, что модуль дезинтеграции снабжен жестко закрепленной на опорах эстакадой и двумя механическими дезинтеграторами, при этом поперечина эстакады снабжена ориентированной по ее центру и шарнирно закрепленной на ней с возможностью перемещения посредством опор качения платформой, а платформа снабжена приводом ее поворота, шарнирно закрепленным на платике, жестко связанным с поперечиной эстакады, при этом механические дезинтеграторы снабжены рыхлителями, выполненными с возможностью вращения вокруг осей и перемещения в горизонтальных и вертикальных плоскостях, при этом приводы вращения механических дезинтеграторов установлены на дополнительных основаниях и связаны посредством рычагов с пазами осей рыхлителей, а оси рыхлителей посредством шарнирных связей с вилками приводов перемещения рыхлителей в вертикальных плоскостях установлены с возможностью телескопического перемещения относительно связей приводов перемещения рыхлителей в горизонтальных плоскостях, при этом связи приводов перемещения рыхлителей в горизонтальных плоскостях снабжены скользящими опорами, входящими во взаимодействие с направляющими, жестко связаны с приводами перемещения рыхлителей в вертикальных плоскостях и дополнительными основаниями приводов вращения, и выполнены с продольными пазами для перемещения вилок приводов перемещения рыхлителей в вертикальных плоскостях, а механические дезинтеграторы снабжены датчиками фиксации физико-механического состояния породы, связанными с автоматической системой управления дезинтеграцией и консолями, при этом консоль одного механического дезинтегратора жестко соединена с платформой, а консоль другого механического дезинтегратора шарнирно закреплена на оси платформы с возможностью перемещения относительно платформы.
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС С МНОГОСТУПЕНЧАТОЙ ДЕЗИНТЕГРАЦИЕЙ | 2002 |
|
RU2206403C1 |
| ПОТОЧНАЯ ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ПО ПЕРЕРАБОТКЕ МЕТАЛЛОСОДЕРЖАЩЕЙ СМЕСИ РОССЫПНЫХ ПОРОД | 1994 |
|
RU2078616C1 |
| RU 2055203 C1, 21.02.1996 | |||
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС С МНОГОСТУПЕНЧАТОЙ ДЕЗИНТЕГРАЦИЕЙ | 2002 |
|
RU2209974C1 |
| ГЕОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС С МНОГОСТУПЕНЧАТОЙ ДЕЗИНТЕГРАЦИЕЙ | 2002 |
|
RU2209678C1 |
| РУЧНОЙ ПОЖАРНЫЙ СТВОЛ | 2012 |
|
RU2484867C1 |

