Изобретение относится к сельскохозяйственному машиностроению, в частности к способам и устройствам для обработки почвы с подрезанием верхнего слоя без оборота пласта.
Известно почвообрабатывающее орудие [1], включающее лапу - сошник с механизмом копирования рельефа почвы, выполненного в виде пружинно-упругого демпфера и закрепленного на раме корпуса с вертикальными направляющими и взаимодействующими с ними двумя парами роликов.
Недостатком данного почвообрабатывающего орудия является то, что его рабочий орган громоздок, занимает много места на раме орудия, не обеспечивает равномерность глубины обработки, т.к. колебания рабочего органа происходят в вертикальной плоскости, происходит так называемый "захват колебаний", когда колебания рамы накладываются на колебания рабочего органа.
Известен вибрационный глубокорыхлитель [2], включающий раму с жестко присоединенным к ней продольным брусом, рыхлительный рабочий орган с вертикальной стойкой, закрепленный на раме вибратор, двухзвенный упругий элемент, при этом тяга вибратора установлена с возможностью изменения величины угла между ней и стойкой рабочего органа.
Недостатком данного вибрационного глубокорыхлителя является сложность конструкции, использование вибратора в виде подвешенного груза создает дополнительные нагрузки на шарнирные соединения, что снижает надежность и долговечность орудия, осуществление колебаний лишь в одной продольной плоскости.
Наиболее близким по технической сущности к предлагаемому изобретению является рабочий орган для подпочвенно-разбросного посева [3].
Рабочий орган включает подвижную нижнюю и неподвижную верхнюю части. На подвижной части рабочего органа смонтирована лапа, имеющая режущую кромку. Неподвижная часть корпуса жестко закреплена на понизителе несущей системы посевной машины. В нерабочей зоне лапы-сошника имеется устройство для разбросного посева. Между подвижной и неподвижной частями корпуса расположен шариковый сепаратор, шарики которого двухрядно расположены в горизонтальных направляющих. С передней и с тыльной сторон рабочего органа расположены пружины.
Недостатком данного рабочего органа является сложность конструкции шарикового сепаратора, что снижает ее надежность, осуществление колебаний лишь в продольной плоскости, а также отсутствие возможности регулирования жесткости пружин для обеспечения колебаний рабочего органа на различных почвах.
Заявляемое изобретение направлено на решение следующей задачи: повышение качества обработки почвы, предотвращение забивания и залипания рабочих органов и снижение тягового сопротивления орудия.
Поставленная задача решается за счет того, что в почвообрабатывающем орудии, включающем раму с опорными колесами, закрепленные на раме рамки рабочих органов с установленными на них рабочими органами для рыхления слоя почвы в виде плоскорежущих лап, рабочие органы крепятся к рамкам посредством вертикального шарнира и упругих элементов, обеспечивающих возможность автоколебаний рабочих органов в поперечной плоскости. Рамки рабочих органов крепятся к раме орудия также при помощи упругих элементов, что обеспечивает возможность колебаний рабочих органов в продольной плоскости. При работе орудия рабочие органы входят в плотные слои почвы, что сопровождается деформацией упругих связей крепления рамок рабочих органов к раме орудия, и в упругих связях происходит накопление потенциальной энергии. Далее происходит скол блока почвы, а накопленная потенциальная энергия упругих элементов переходит в кинетическую энергию рабочих органов и сколотой почвы. Сколотая почва приобретает скорость, большую скорости движения орудия, и отбрасывается вперед. В дальнейшем рабочие органы внедряются в неразрушенную почву, что снижает призму волочения. При возникновении во время работы разности сопротивлений почвы на правый и левый лемехи плоскорежущей лапы происходит деформация упругих элементов, крепящих лапу к рамке рабочего органа, в результате чего возникают колебания рабочего органа в поперечной плоскости. При этом с увеличением плотности почвы и скорости движения рабочего органа частота колебаний увеличивается, а амплитуда уменьшается, т.е. происходит автоматическая настройка на более рациональный режим колебаний. Осуществление колебаний рабочих органов в продольной и поперечной плоскостях позволяет значительно уменьшить или вообще исключить призму волочения, что приводит к снижению тягового сопротивления.
Для обеспечения колебаний рабочих органов при обработке различных видов почв все упругие связи снабжены механизмами регулирования жесткости.
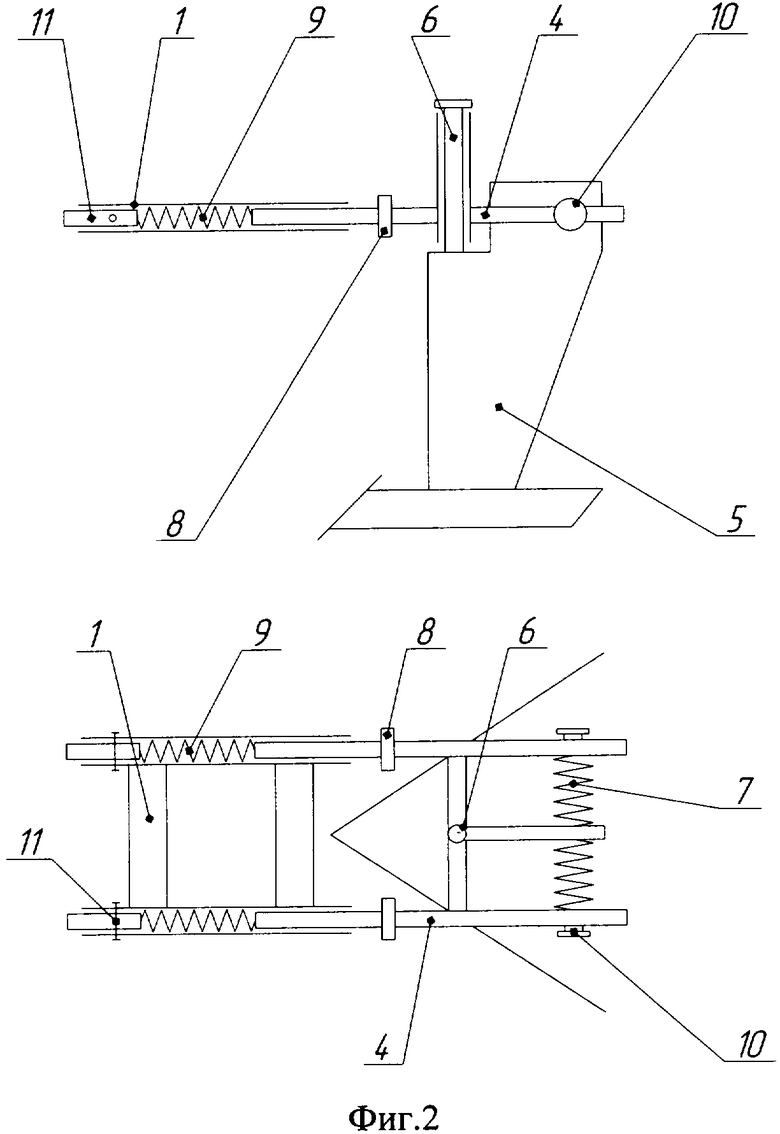
На фиг.1 изображена общая конструктивно-технологическая схема почвообрабатывающего орудия в двух проекциях. На фиг.2 изображена схема крепления рабочего органа.
Комбинированное почвообрабатывающее орудие состоит из рамы 1, механизма навески 2 и опорных колес 3. На раме 1 закреплены рамки 4 рабочих органов. Рабочие органы 5 для рыхления слоя почвы в виде плоскорежущих лап крепятся к рамкам 4 посредством вертикального шарнира 6 и упругих элементов 7, обеспечивающих возможность автоколебаний рабочих органов в поперечной плоскости. Рамки рабочих органов, снабженные ограничителями 8, крепятся к раме орудия также при помощи упругих элементов 9, что обеспечивает возможность колебаний рабочих органов в продольной плоскости. Механизмы регулирования жесткости 10 и 11 (например, в виде винтового механизма и ползуна с отверстиями соответственно) упругих элементов 7 и 9 позволяют обеспечить автоколебания рабочих органов на различных типах почв.
Почвообрабатывающее орудие работает следующим образом.
При работе орудия рабочие органы 5 входят в плотные слои почвы, что сопровождается деформацией упругих связей 9 крепления рамок рабочих органов 4 к раме 1 орудия, и в упругих связях происходит накопление потенциальной энергии. Далее происходит скол блока почвы, а накопленная потенциальная энергия упругих элементов переходит в кинетическую энергию рабочих органов и сколотой почвы, при этом сколотая почва приобретает скорость, большую скорости движения орудия, и отбрасывается вперед. В дальнейшем рабочие органы внедряются в неразрушенную почву, что снижает призму волочения, т.е. движение почвы происходит преимущественно по металлической поверхности лемеха, а не по неподвижному слою почвы (призме волочения), образующемуся впереди него. При возникновении во время работы разности сопротивлений почвы на правый и левый лемехи рабочего органа 5 происходит деформация упругих элементов 7, крепящих лапу к рамке 4 рабочего органа, в результате чего возникают колебания рабочего органа в поперечной плоскости. При этом с увеличением плотности почвы и скорости движения рабочего органа частота колебаний увеличивается, а амплитуда уменьшается, т.е. происходит автоматическая настройка на более рациональный режим колебаний. Осуществление колебаний рабочих органов в продольной и поперечной плоскостях позволяет значительно уменьшить или вообще исключить призму волочения, что приводит к снижению тягового сопротивления. Глубина обработки почвы устанавливается при помощи опорных колес 3.
Литература
1. А.С. 1501940 СССР, МКИ А01В 49/04 и А01С 7/20. 1989. БИ №31.
2. А.С. 1565363 СССР, МКИ 5 А01В 35/12, 13/08. 1990. БИ №19.
3. Пат. РФ 2176439, МПК 7 А01В 49/06, А01С 7/20. 2001. БИ №31 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Почвообрабатывающее орудие | 2023 |
|
RU2808140C1 |
| Почвообрабатывающее орудие | 2023 |
|
RU2802754C1 |
| Почвообрабатывающее орудие | 2024 |
|
RU2828432C1 |
| Почвообрабатывающее орудие | 2024 |
|
RU2828433C1 |
| РАБОЧИЙ ОРГАН ДЛЯ ПОВЕРХНОСТНОЙ ОБРАБОТКИ ПОЧВЫ | 2008 |
|
RU2379865C1 |
| Рыхлитель вибрационный | 2019 |
|
RU2712893C1 |
| Плоскорежущая лапа | 2024 |
|
RU2831803C1 |
| ЛАПА ПЛОСКОРЕЖУЩАЯ ОДНОСТОРОННЯЯ | 2008 |
|
RU2369059C1 |
| Почвообрабатывающее орудие | 1990 |
|
SU1777671A1 |
| ОРУДИЕ ДЛЯ ПОВЕРХНОСТНОЙ ОБРАБОТКИ ПОЧВЫ | 2004 |
|
RU2268563C1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для обработки почвы с подрезанием верхнего слоя без оборота пласта. Орудие содержит раму с опорными колесами, закрепленные на раме рамки с установленными на них рабочими органами для рыхления слоя почвы в виде плоскорежущих лап. Рабочие органы закреплены к рамкам посредством вертикального шарнира и упругих элементов, обеспечивающих возможность автоколебаний рабочих органов в поперечной плоскости. Рамки рабочих органов закреплены к раме орудия при помощи упругих элементов, обеспечивающих возможность колебаний рабочих органов в продольной плоскости. Упругие элементы крепления рабочих органов к рамкам и крепления рамок к раме орудия снабжены механизмами регулирования жесткости. Такое конструктивное выполнение позволит повысит качество обработки почвы при одновременном снижении тягового сопротивления. 1 з.п. ф-лы, 2 ил.
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 0 |
|
SU398184A1 |
| Комбинированный рабочий орган культиватора | 1986 |
|
SU1471975A1 |
| Почвообрабатывающий рабочий орган | 1987 |
|
SU1496655A1 |
| Устройство для автоматического регулирования потенциала проявляющего электрода в электрографических аппаратах | 1979 |
|
SU868687A1 |
| Ротационная борона | 1988 |
|
SU1570662A1 |

