Настоящее изобретение относится к чувствительному элементу с гигантской магниторезистивностью согласно ограничительной части главного пункта формулы изобретения, а также к применению такого чувствительного элемента.
Уровень техники
Гигантский магниторезистивный эффект (ГМР-эффект) можно использовать в так называемых спиновых вентилях или спиновых клапанах для определения угла поворота. Об этом говорится, например, в WO 00/79298 или в ЕР 0905523 А2.
Спиновые вентили с ГМР состоят в основном из двух тонких ферромагнитных слоев с результирующей намагниченностью m1, соответственно m2 и расположенного между ними разделяющего их тонкого немагнитного слоя. Электрическое сопротивление R(α) подобной слоистой структуры проявляет косинусоидальную зависимость от угла α между направлением намагниченности m1 и направлением намагниченности m2 следующего вида:

Максимальное относительное изменение сопротивления  характеризует ГМР-эффект и обычно составляет от 5 до 15%.
характеризует ГМР-эффект и обычно составляет от 5 до 15%.
Слоистые структуры спиновых вентилей с ГМР обычно получают осаждением соответствующих материалов путем их катодного распыления и затем структурируют обычными методами фотолитографии и травления.
Существенное значение для выполнения спиновым вентилем предусмотренной для него функции имеет наличие у первого ферромагнитного слоя так называемого слоя с опорной намагниченностью (СОН), постоянной намагниченности m1, направление которой по меньшей мере приблизительно должно оставаться неизменным под действием приложенного к слоистой структуре извне магнитного поля, параметры которого, прежде всего направление и/или напряженность, требуется измерить, и наличием у второго ферромагнитного слоя так называемого слоя с нефиксированной, т.е. со свободно изменяющейся намагниченностью (ССИН), или чувствительного слоя, намагниченности m2, направление которой должно легко изменяться на по меньшей мере приблизительно параллельное внешнему магнитному полю. Для соблюдения обоих этих требований, во-первых, устраняют магнитную (индуктивную) связь между обоими ферромагнитными слоями за счет выполнения разделяющего их промежуточного немагнитного слоя (НМС) достаточной толщины, обычно составляющей несколько нанометров, и, во-вторых, фиксируют намагниченность слоя с опорной намагниченностью (СОН), предусматривая, например, дополнительный, непосредственно примыкающий к нему антиферромагнитный слой, так называемый слой естественного антиферромагнетика (АФМ), а также фиксируют их двухстороннюю магнитную связь за счет обменного взаимодействия.
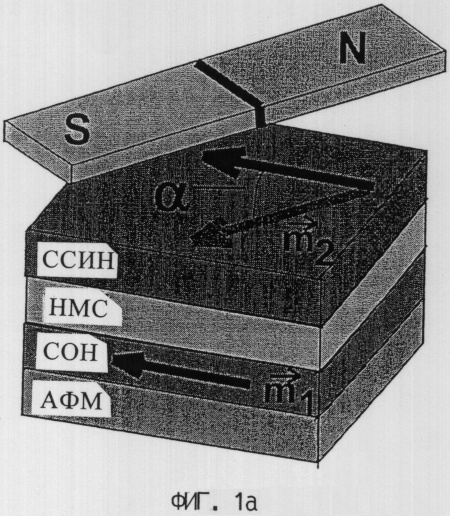
Сказанное схематично проиллюстрировано на фиг.1а, где показаны слоистая структура с ГМР или многослойный чувствительный элемент с ГМР и задающий магнит, создающий воздействующее на эту слоистую структуру, соответственно на этот чувствительный элемент магнитное поле.
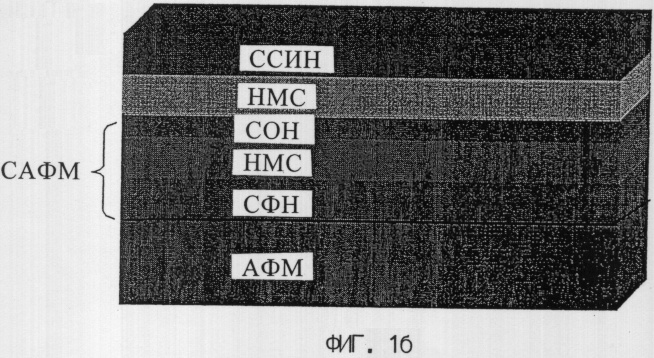
Дополнительно стабилизировать направление опорной намагниченности позволяет использование дополнительного, так называемого синтетического или "искусственного" антиферромагнетика (САФМ). Такой САФМ состоит согласно фиг.1б из двух ферромагнитных слоев и обеспечивающего сильную антиферромагнитную связь между ними промежуточного немагнитного слоя. Тот из двух этих ферромагнитных слоев, который непосредственно граничит с естественным антиферромагнетиком АФМ, обозначается как слой с фиксированной намагниченностью (СФН), поскольку его намагниченность МР фиксируется за счет связи с естественным антиферромагнетиком (АФМ). Второй же входящий в состав САФМ ферромагнитный слой, намагниченность MR которого вследствие указанной антиферромагнитной связи ориентирована в направлении, противоположном направлению намагниченности слоя с фиксированной намагниченностью (СФН), служит слоем с опорной намагниченностью (СОН) для уже описанной выше слоистой структуры спинового вентиля с ГМР.
Для выделения зависящего от угла поворота полезного сигнала согласно уровню техники в чувствительном элементе с ГМР четыре резистивных элемента спинового вентиля соединяют между собой, например, алюминиевыми тонкопленочными токопроводящими дорожками, по мостовой схеме Уитстона (в виде полного моста Уитстона). Сигнал максимальной амплитуды получают при показанной на фиг.2 взаимно противоположной ориентации направлений опорной намагниченности MR резисторов в пределах каждого активного плеча мостовой схемы и одинаковой ориентации направлений опорной намагниченности МR, расположенных в полном мосте по диагонали резисторов.
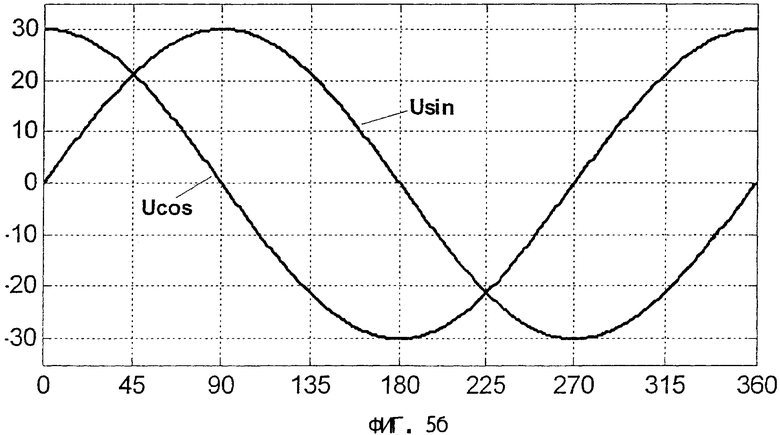
Датчик угла поворота, работа которого основана на ГМР-эффекте, обычно имеет второй полный мост из резисторов с ГМР, направления опорной намагниченности которых, как показано на фиг.2, повернуты на 90° относительно направлений опорной намагниченности резисторов первого полного моста. В результате выходной сигнал Usin второго полного моста оказывается сдвинут по фазе на 90° относительно выходного сигнала Ucos первого полного моста.
На основе обоих снимаемых с выходов двух мостов сигналов Ucos, Usin, один из которых изменяется по косинусоидальному, а другой - по синусоидальному закону, затем путем вычисления значений арктангенса, соответственно с использованием соответствующих алгоритмов (например, алгоритма CORDIC) определяют лежащий в пределах полного поворота на 360° однозначный угол α к направлению внешнего магнитного поля В.
Ориентация опорной намагниченности в различных направлениях в показанном на фиг.2 примере можно обеспечить, например, за счет локального нагрева отдельных, включенных по мостовой схеме резисторов с ГМР до температуры Т, которая превышает температуру блокирования (точку Нееля) антиферромагнитного слоя (АФМ), но не достигает точки Кюри ферромагнитных слоев (СФН, СОН), показанных на фиг.1а, соответственно фиг.1б слоистых структур, в результате чего в антиферромагнитном слое исчезает антиферромагнитная упорядоченность атомных магнитных моментов или спинов, и последующего их охлаждения во внешнем магнитном поле, имеющем соответствующую ориентацию. В процессе происходящего при этом формирования нового антиферромагнитного порядка атомных магнитных моментов или спинов сохраняется спиновая конфигурация, получаемая в результате обменного взаимодействия на поверхности раздела между антиферромагнитным слоем (АФМ-слоем) и соседним ферромагнитным слоем (СФН-слоем). Как следствие, фиксируется направление намагниченности соседнего ферромагнитного слоя (слоя с фиксированной намагниченностью или сокращенно СФН). Локальный нагрев образующих мостовую схему резисторов с ГМР можно обеспечить, например, воздействием на них коротким импульсом лазерного излучения или электрического тока. При этом импульс тока можно пропускать непосредственно через проводящую структуру с ГМР и/или через дополнительный электронагревательный элемент.
В известных датчиках угла поворота, работа которых основана на ГМР-эффекте, направление опорной намагниченности MR отдельных резисторов измерительного моста выбирается либо параллельным либо перпендикулярным направлению полосковых резистивных элементов с ГМР. Соблюдение подобного условия позволяет свести к минимуму влияние анизотропии формы. Помимо этого полосковые резистивные элементы с ГМР в показанном на фиг.2 полном мосте предпочтительно располагать параллельно друг другу. Подобное расположение полосковых резистивных элементов в полном мосте позволяет подавить появление в выходном сигнале составляющей, обусловленной наложением анизотропного магниторезистивного эффекта (АМР-эффекта). Обусловленная АМР-эффектом составляющая выходного сигнала измерительного моста основана при этом на зависимости электрического сопротивления от угла ϑ между направлением тока и направлением намагниченности следующего вида:

При расположении же полосковых резисторов с ГМР в пределах одного активного плеча измерительного моста не параллельно, а перпендикулярно друг другу, как это имеет место, в частности, в показанном на фиг.10 в заявке WO 00/79298 примере, создаются даже наиболее благоприятные условия для появления в выходном сигнале моста обусловленной АМР-эффектом составляющей. Наличие подобной, обусловленной АМР-эффектом составляющей в выходном сигнале измерительного моста снижает точность определения угла поворота датчиком, работа которого основана на ГМР-эффекте.
Преимущества изобретения
По указанным выше причинам в измерительных мостах известных датчиков угла поворота, работа которых основана на ГМР-эффекте, не используется вращательно-симметричное расположение резисторов. Более того, оба полных моста обычно расположены рядом друг с другом и параллельно друг другу. В результате известные датчики из-за отсутствия у них вращательной симметрии в расположении резисторов обладают повышенной чувствительностью к неоднородности направления задающего магнитного поля, т.е. действующего извне магнитного поля, а также к перепадам температуры.
Поскольку в известных датчиках угла поворота, работа которых основана на ГМР-эффекте, угол между направлением фиксированной намагниченности, соответственно направлением опорной намагниченности и направлением продольной протяженности полосок, в форме которых выполнены их резистивные элементы, в пределах одного резистора измерительного моста всегда остается постоянным, такие датчики лишены возможности компенсировать обусловленное анизотропией формы влияние на характеристику фиксированной намагниченности и устранять связанные с этим недостатки в точности определения углового положения.
В случае же датчика угла поворота, рабочий диапазон которого охватывает полный угол в 360°, наличие у него вращательно-симметричной конструкции, наоборот, является наиболее предпочтительным, поскольку позволяет исключить дополнительные, зависящие от направления поля погрешности в определении угла поворота, обусловленные уже самой асимметричностью расположения отдельных резистивных элементов с ГМР.
Поэтому предлагаемое в изобретении вращательно-симметричное расположение резистивных элементов с ГМР в обоих мостах Уитстона позволяет не только снизить чувствительность датчика, соответственно его чувствительного элемента к колебаниям направления поля и колебаниям температуры, но и подавить нежелательную, обусловленную АМР-эффектом составляющую выходного сигнала, а также уменьшить влияние анизотропии формы на характеристику фиксированной намагниченности и точность измерения угла чувствительным элементом с ГМР.
Наряду с вращательно-симметричным расположением резистивных элементов с ГМР в обоих мостах Уитстона наиболее предпочтительно далее располагать резисторы в чередующемся порядке секторами, т.е. как бы во "вложенном" один в другой виде или по типу лепестков цветка ромашки. За счет этого удается дополнительно уменьшить чувствительность датчика, соответственно его чувствительного элемента к колебаниям направления поля и колебаниям температуры.
Подавление нежелательной обусловленной АМР-эффектом составляющей выходного сигнала обеспечивается за счет дополнительного подразделения каждого отдельного резистивного элемента с ГМР полных мостов Уитстона на две имеющие одинаковое исполнение половины или секции, составляющие одну из которых выполненные в форме полосок резистивные элементы с ГМР ориентированы перпендикулярно выполненным в форме полосок резистивным элементам с ГМР, составляющим другую половину, соответственно секцию. Подобное подразделение каждого резистивного элемента с ГМР на две одинаковые половины или секции прежде всего позволяет повысить точность измерения угла поворота. В этом отношении еще одно преимущество состоит в том, что за счет ориентации выполненных в форме полосок резистивных элементов с ГМР ("направление продольной протяженности полосковых резистивных элементов с ГМР"), составляющих одну из двух секций каждого резистора, параллельно, а выполненных в форме полосок резистивных элементов с ГМР, составляющих другую секцию этого же резистора, перпендикулярно направлению фиксированной намагниченности, соответственно направлению опорной намагниченности в пределах каждого резистивного элемента с ГМР обоих мостов Уитстона усредняется влияние фиксированных направлений намагниченности, ориентированных параллельно и перпендикулярно направлению продольной протяженности полосковых резистивных элементов. В этом случае характеристика фиксированной намагниченности, в свою очередь, идентична для всех подразделенных на две половины или секции резистивных элементов с ГМР обоих мостов Уитстона (усреднение по обеим секциям каждого резистора). При этом выходные сигналы U1, U2 обоих мостов предпочтительно сдвинуты по фазе друг относительно друга на 45°.
Преимущество, связанное с ориентацией направления фиксированной намагниченности, соответственно направления опорной намагниченности по меньшей мере приблизительно под углом 45° к направлению продольной протяженности полосковых резистивных элементов с ГМР состоит в идентичности характеристики фиксированной намагниченности у отдельных резистивных элементов с ГМР, т.е. прежде всего в повышении стабильности выходного сигнала чувствительного элемента с ГМР и в обеспечении долговременной стабильности самого чувствительного элемента с ГМР. В этом случае, кроме того, выходные сигналы U1, U2 обоих мостов сдвинуты по фазе друг относительно друга на 45°.
Согласно еще одному предпочтительному варианту выходные сигналы U1, U2 обоих мостов, сдвинутые друг относительно друга по фазе на любой угол ϕ, предпочтительно на угол ϕ, составляющий 45° или около 45°, можно предпочтительно путем преобразования координат отображать на ортогональные сигналы с фазовым сдвигом между ними, равным 90°. На основе таких ортогональных сигналов затем путем вычисления значений арктангенса, соответственно с использованием соответствующего алгоритма, например, алгоритма CORDIC, можно определить искомый угол α к направлению внешнего магнитного поля В.
Указанное выше преобразование координат обеспечивает, кроме того, достижение дополнительного преимущества, состоящего в возможности компенсировать при отображении на ортогональные сигналы обусловленные производственными факторами отклонения от номинального фазового сдвига между обоими выходными сигналами U1, U2 двух мостов.
Чертежи
На фиг.1а упрощенно показана слоистая структура спинового вентиля с ГМР, образованная двумя ферромагнитными слоями СОН и ССИН с направлениями намагниченности m1 и m2, промежуточным немагнитным слоем НМС и антиферромагнитным слоем АФМ. Последний из указанных слоев служит для фиксации опорной намагниченности m1. На этом чертеже показан далее задающий магнит для приложения внешнего магнитного поля В. Угол α представляет собой угол между направлением магнитного поля соответственно намагниченности ферромагнитного слоя со свободно изменяющейся намагниченностью (ССИН), а тем самым и направлением внешнего магнитного поля В в плоскости чувствительного элемента с ГМР и направлением опорной намагниченности.
На фиг.1б показана слоистая структура спинового вентиля с ГМР, образованная слоем естественного антиферромагнетика АФМ и дополнительным слоем синтетического антиферромагнетика САФМ, а также еще одним промежуточным немагнитным слоем НМС и ферромагнитным слоем со свободно изменяющейся намагниченностью ССИН.
На фиг.2 показана эквивалентная схема чувствительного элемента, который предназначен для измерения угла поворота и работа которого основана на ГМР-эффекте, с двумя полными мостами (мостовыми схемами Уитстона), при этом направления опорной намагниченности MR в каждом из плеч обоих этих мостов попарно ориентированы в противоположные стороны, и направления опорной намагниченности в одном мосте повернуты на 90° к направлениям опорной намагниченности в другом мосте. Помимо этого направление опорной намагниченности MR ориентировано параллельно или перпендикулярно продольной протяженности отдельных полосковых резистивных элементов с ГМР, каждый из которых имеет, например, показанное на фиг.1а или фиг.1б исполнение. Эта "продольная протяженность" условно обозначена несколькими параллельными линиями, изображенными в пределах каждого отдельного резистивного элемента с ГМР. Помимо этого на фиг.2 указано направление внешнего магнитного поля В, которое образует с опорным направлением угол α, измеряемый чувствительным элементом с ГМР. Такое опорное или нулевое направление определяется при этом выбором направлений опорной намагниченности в обоих полных мостах, один из которых выполнен в виде синусного, а другой - в виде косинусного полного моста.
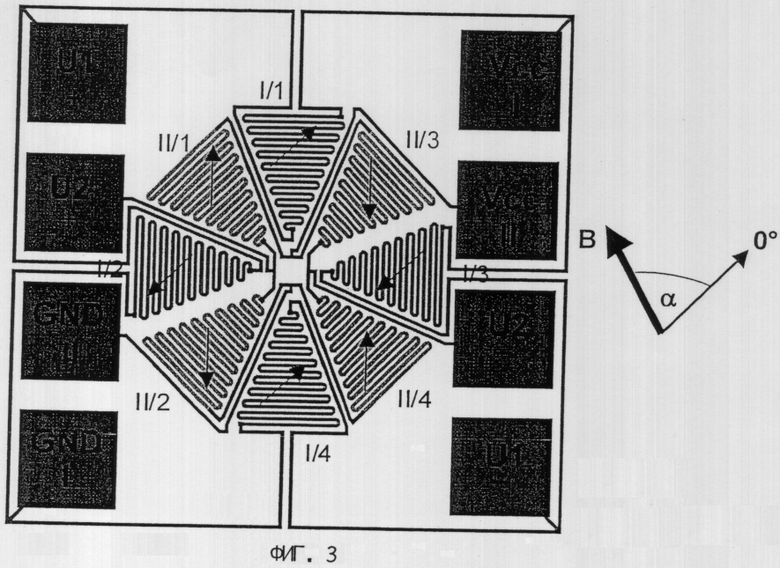
На фиг.3 показаны измерительные мосты с вращательно- или осесимметричным расположением меандрообразных или извилистых, "вложенных" один в другой, т.е. расположенных секторами, резистивных элементов с ГМР, обозначенных позициями I/1-I/4 (мост I) и II/1-II/4 (мост II). При этом каждое из направлений опорной намагниченности (обозначенные на фиг.3 соответствующими стрелками) ориентировано в мосте I под углом 45° к продольной протяженности соответствующих полосковых резистивных элементов с ГМР, а каждое из направлений опорной намагниченности в мосте II повернуто на 45° к соответствующему направлению опорной намагниченности в мосте I. Помимо этого на фиг.3 указано направление внешнего магнитного поля В, которое образует с опорным направлением угол α, измеряемый чувствительным элементом с ГМР. Это опорное или нулевое направление определяется выбором направлений опорной намагниченности в мосте I и в мосте II, при этом выходной сигнал моста I должен иметь косинусоидальную характеристику в функции угла α.
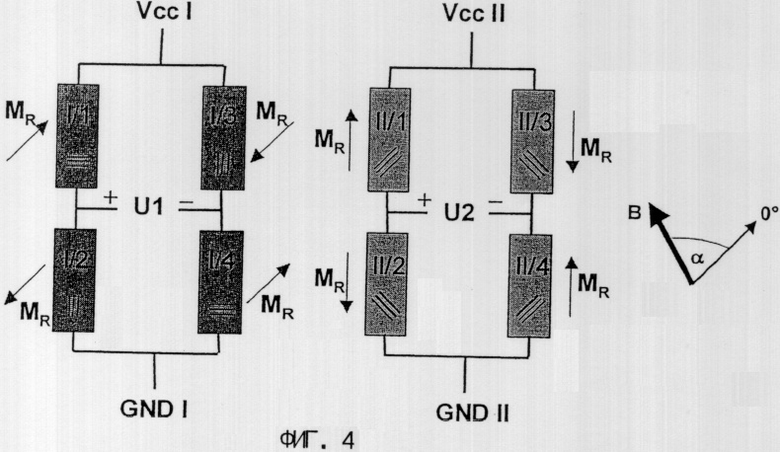
На фиг.4 показана эквивалентная схема чувствительного элемента с ГМР с изображенной на фиг.3 топологией. Каждое из направлений фиксированной, соответственно опорной намагниченности MR ориентировано при этом под углом 45° к продольной протяженности соответствующих полосковых резистивных элементов с ГМР, которая и в этом случае аналогично фиг.2 условно обозначена несколькими параллельными линиями, изображенными в пределах каждого отдельного резистивного элемента с ГМР, а в мосте II дополнительно повернуто на 45° к соответствующему направлению намагниченности в мосте I. Вследствие взаимно перпендикулярного расположения полосковых резисторов в каждом активном плече измерительных мостов усиливается обусловленная АМР-эффектом составляющая выходного сигнала.
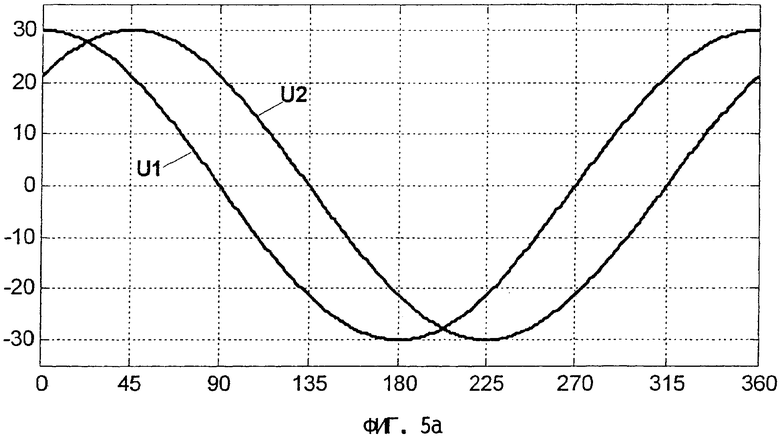
На фиг.5а показаны выходные сигналы U1 и U2 чувствительного элемента с ГМР, разность фаз между которыми составляет 45°, поскольку в измерительных мостах, показанных на фиг.3, соответственно фиг.4, фиксированная, соответственно опорная намагниченность MR ориентирована под углом 45° к продольной протяженности их полосковых резистивных элементов. На фиг.5б показаны соответственно преобразованные, взаимно ортогональные выходные сигналы Ucos и Usin чувствительного элемента с ГМР, разность фаз между которыми составляет 90°. Обусловленная АМР-эффектом составляющая выходного сигнала на фиг.5а и 5б не показана. По оси х на фиг.5а и 5б указано угловое направление внешнего магнитного поля В в градусах, т.е. угол α, тогда как по оси у на фиг.5а указана относительная амплитуда выходного сигнала чувствительного элемента с ГМР в мВ/В, а на фиг.5б - относительная амплитуда преобразованного выходного сигнала чувствительного элемента с ГМР в мВ/В.
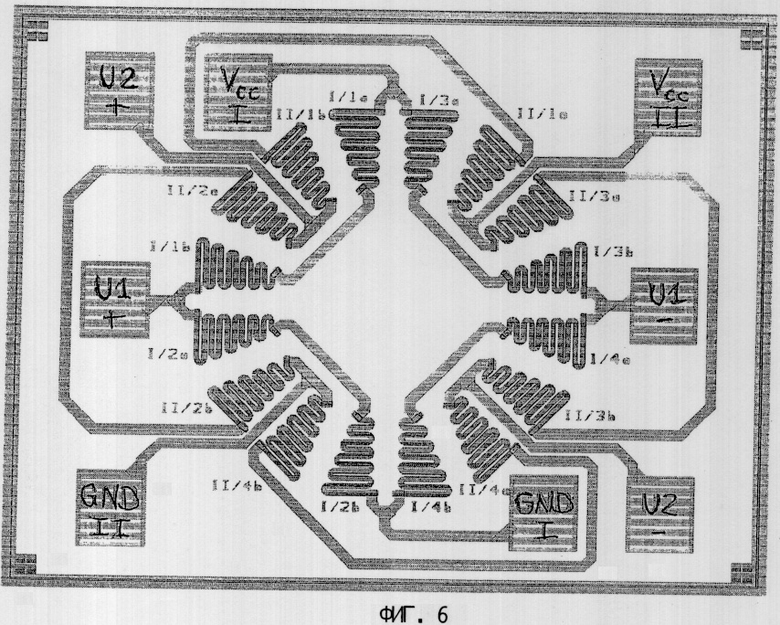
На фиг.6 показаны измерительные мосты с вращательно-симметричным, по меньшей мере приблизительно круговым или восьмиугольным расположением "вложенных" один в другой меандрообразных или извилистых резистивных элементов с ГМР, при этом подавление обусловленной АМР-эффектом составляющей выходного сигнала обеспечивается за счет разделения каждого из отдельных резистивных элементов на две одинаковые половины, в каждой из которых полосковые резистивные элементы ориентированы перпендикулярно полосковым резистивным элементам другой половины.
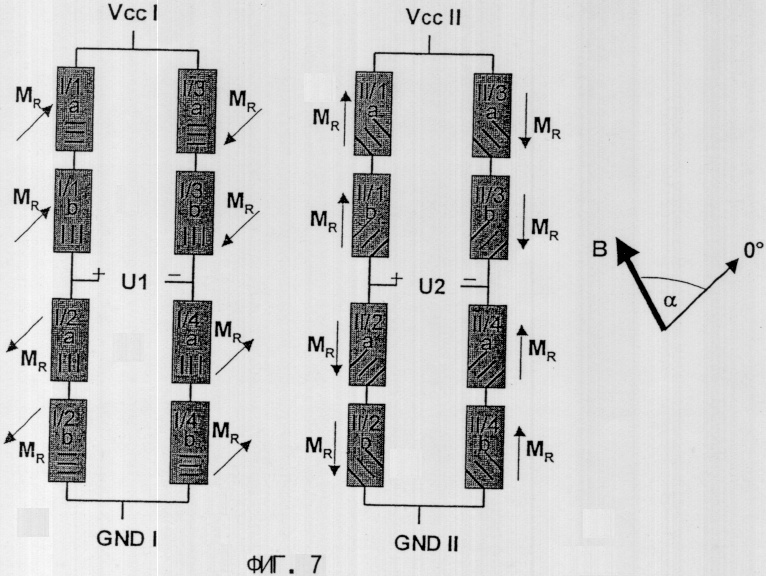
На фиг.7 показана эквивалентная схема измерительных мостов с показанным на фиг.6 расположением резистивных элементов с ГМР. Подавление обусловленной АМР-эффектом составляющей выходного сигнала обеспечивается в данном случае за счет разделения в измерительных мостах каждого резистивного элемента I/1, I/2 и так далее до II/4 на две половины а и b, в каждой из которых полосковые резистивные элементы с ГМР ориентированы перпендикулярно полосковым резистивным элементам с ГМР другой половины. Направление фиксированной, соответственно опорной намагниченности MR у каждого из полосковых резистивных элементов с ГМР ориентировано под углом 45° к его продольной протяженности. Продольная протяженность каждого из полосковых резистивных элементов с ГМР условно обозначена несколькими, изображенными в пределах каждого из них параллельными линиями.
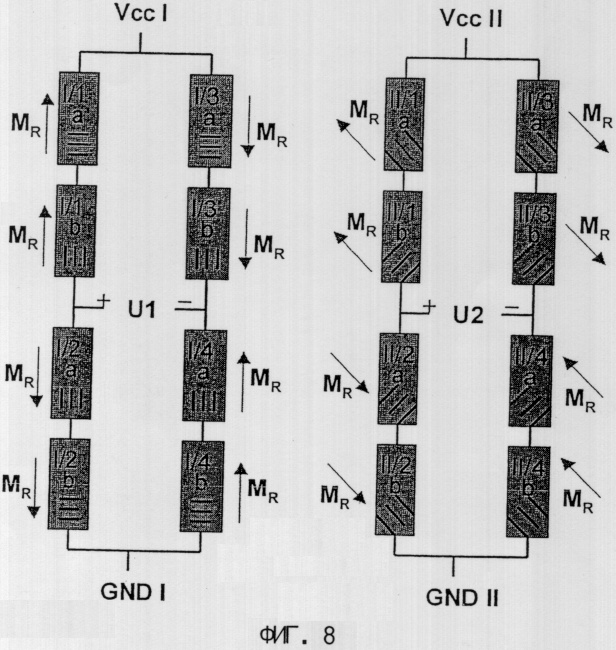
На фиг.8 показана эквивалентная схема измерительных мостов с показанным на фиг.6 расположением резистивных элементов с ГМР, но с другой ориентацией направлений фиксированной, соответственно опорной намагниченности MR, которая в отличие от показанного на фиг.7 примера у каждого отдельного резистивного элемента с ГМР I/1, I/2 и так далее до II/4 ориентирована в одной его половине под углом 0°, а в другой его половине - под углом 90° к направлению продольной протяженности полосковых резистивных элементов. Влияние направления фиксированной намагниченности усредняется в данном случае за счет того, что направление фиксированной, соответственно опорной намагниченности у каждого состоящего из двух половин полоскового резистивного элемента с ГМР I/1, I/2 и так далее до II/4 ориентировано и параллельно и перпендикулярно продольной протяженности соответствующих полосок, форму которых имеет каждый из этих резистивных элементов.
Примеры осуществления изобретения
а) Измерительные мосты с вращательно-симметричным расположением резистивных элементов
На фиг.3 показаны два полных моста (моста Уитстона) с одним из возможных вращательно-симметричным расположением образующих их резистивных элементов, общее количество которых равняется восьми. В отличие от датчиков с анизотропной магниторезистивностью (АМР), у которых опорное направление (направление опорной намагниченности) задается направлением тока, которое, в свою очередь, определяется ориентацией полосок, форму которых имеют резистивные элементы, у датчика угла поворота с гигантской магниторезистивностью (ГМР) опорное направление определяется направлением намагниченности слоя с опорной намагниченностью (СОН). В принципе направление фиксированной, соответственно опорной намагниченности можно при этом задавать любым, однако для получения у всех резистивных элементов одной и той же характеристики фиксированной намагниченности направление фиксированной намагниченности, соответственно опорное направление ориентируют в данном случае под углом 45° к продольной протяженности полосок, форму которых имеют резистивные элементы. Сказанное дополнительно проиллюстрировано на фиг.4, где наряду с направлением или ориентацией полосок, форму которых имеют резистивные элементы (указано несколькими параллельными линиями, изображенными в пределах условных обозначений резистивных элементов), указано также направление опорной намагниченности MR.
б) Отображение на ортогональные сигналы
При ориентации фиксированной намагниченности или опорной намагниченности под углом 45° к направлению продольной протяженности полосок, форму которых имеют резистивные элементы с ГМР, фазовый сдвиг между обоими выходными сигналами U1 и U2 двух мостов составляет согласно фиг.5а не традиционные 90°, а лишь 45°. Однако такие сигналы U1, U2 можно простым путем преобразовать в показанные на фиг.5б ортогональные сигналы, один из которых изменяется по косинусоидальному, а другой - по синусоидальному закону. Для этого в электронном блоке обработки сигналов датчика выполняется следующее преобразование:
В приведенной выше формуле ϕ обозначает сдвиг фазы выходного сигнала второго моста относительно фазы выходного сигнала первого моста. Подобный фазовый сдвиг в принципе можно выбирать любым, однако предпочтительно задавать его равным 45°.
На основе полученных путем вышеуказанного преобразования косинусоидальных и синусоидальных сигналов показанного на фиг.5б вида затем в электронном блоке обработки сигналов датчика можно путем вычисления значения арктангенса, соответственно с использованием соответствующего алгоритма, например алгоритма CORDIC, определить искомый угол α:
Реализация подобного преобразования координат обеспечивает далее достижение важного преимущества, состоящего в возможности выявить и скомпенсировать для каждого конкретного датчика при отображении на ортогональные сигналы (фазовый сдвиг между которыми составляет 90°) обусловленные производственными факторами отклонения от номинального фазового сдвига между обоими выходными сигналов U1, U2 двух мостов. С этой целью, например, при согласовании сигналов U1, U2 путем коррекции смещения нуля и амплитудной коррекции в конце производственной линии определяется и указанный фазовый сдвиг ϕ, например, путем гармонического анализа обоих выходных сигналов U1, U2 двух мостов, и полученное значение сохраняется в памяти электронного блока обработки сигналов датчика.
в) Измерительные мосты с вращательно-симметричным расположением резистивных элементов и подавлением обусловленной АМР-эффектом составляющей выходного сигнала
Расположение резистивных элементов по показанной на фиг.3 схеме создает благоприятные условия для увеличения в выходном сигнале датчика обусловленной АМР-эффектом составляющей, поскольку в каждом активном плече мостовой схемы оба его полосковых резистивных элемента с ГМР ориентированы перпендикулярно друг другу. Этот недостаток можно устранить, если в каждом из измерительных мостов с предпочтительным, также вращательно-симметричным расположением резистивных элементов согласно фиг.6 каждый полосковый резистивный элемент с ГМР разделить на две одинаковые половины или секции, составляющие одну из которых полосковые резистивные элементы с ГМР ориентированы перпендикулярно полосковым резистивным элементам с ГМР, составляющим другую половину. За счет последовательного включения обеих секций резистора с идентичной опорной намагниченностью MR в каждой из них обеспечивается отфильтровывание обусловленной АМР-эффектом составляющей сигнала, тогда как обусловленная ГМР-эффектом составляющая сигнала остается неизменной благодаря идентичному направлению опорной намагниченности MR в обеих секциях одного и того же резистора (резистивного элемента). Для состоящего из двух половин или секций резистивного элемента с ГМР сказанное позволяет пояснить приведенная ниже зависимость:
В приведенной выше формуле α обозначает угол между направлением поля, соответственно направлением намагниченности ферромагнитного слоя со свободно изменяющейся намагниченностью (ССИН) и направлением опорной намагниченности, ϑ обозначает угол между направлением поля, соответственно направлением намагниченности ферромагнитного слоя со свободно изменяющейся намагниченностью (ССИН) и направлением продольной протяженности полосок, форму которых имеют резистивные элементы с ГМР в первой секции резистора. Направление полосок, форму которых имеют резистивные элементы с ГМР, во второй секции резистора повернуто на 90° относительно направления полосок, форму которых имеют резистивные элементы с ГМР, в первой секции резистора.
г) Характеристика фиксированной намагниченности
На примере показанной на фиг.7 эквивалентной схемы поясняется разделение каждого из резисторов (резистивных элементов) мостовых схем на две половины, составляющие одну из которых полосковые резистивные элементы ориентированы перпендикулярно полосковым резистивным элементам другой половины, но в обеих половинах полосковые резистивные элементы имеют одно и то же направление опорной намагниченности MR. В принципе направление фиксированной намагниченности, соответственно направление опорной намагниченности MR можно выбирать любым. Однако предпочтительно ориентировать его под углом 45° к направлению продольной протяженности соответствующих полосковых резистивных элементов, поскольку за счет этого для всех секций резисторов обеспечивается идентичная характеристика фиксированной намагниченности.
В другом варианте фиксированную намагниченность или опорную намагниченность MR можно также ориентировать в направлении, которое в одной из двух секций каждого резистора параллельно направлению продольной протяженности составляющих ее полосковых резистивных элементов, а в другой секции того же резистора перпендикулярно направлению продольной протяженности составляющих ее полосковых резистивных элементов. Хотя в этом случае в отдельных секциях одного и того же резистора характеристика фиксированной намагниченности различна, тем не менее в целом в каждом "полном" резистивном элементе при последовательном включении обеих его отдельных секций вновь обеспечивается идентичная характеристика фиксированной намагниченности.
Связанное с подобным выбором направления фиксированной намагниченности, соответственно направления опорной намагниченности преимущество перед известными датчиками состоит в том, что в пределах каждого резистивного элемента характеристика фиксированной намагниченности усредняется по различным характеристикам фиксированной намагниченности при ориентации направления фиксированной намагниченности, соответственно направления опорной намагниченности параллельно и перпендикулярно к направлению продольной протяженности полосковых резистивных элементов с ГМР.
Описанный выше чувствительный элемент с ГМР, позволяющий измерять угол поворота в диапазоне, составляющем 360°, наиболее пригоден для применения в составе датчика угла поворота для определения абсолютного углового положения распределительного вала или коленчатого вала в двигателе автомобиля, прежде всего в двигателе без распределительного вала, оснащенном механизмом клапанного газораспределения с электрическим или электрогидравлическим управлением, для определения углового положения вала двигателя с электрической коммутацией (коллекторного двигателя) или для определения углового положения стеклоочистителя, либо для применения в составе датчика угла поворота рулевого колеса автомобиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСКОВОД МАГНИТНОГО ДИСКА | 1999 |
|
RU2231134C2 |
| Магнитнорезистивная головка | 1979 |
|
SU862204A1 |
| Спинтронный детектор микроволновых колебаний | 2022 |
|
RU2793891C1 |
| МАГНИТОРЕЗИСТИВНАЯ СЛОИСТАЯ СИСТЕМА И ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ НА ОСНОВЕ ТАКОЙ СЛОИСТОЙ СИСТЕМЫ | 2003 |
|
RU2316783C2 |
| ЯЧЕЙКА МАГНИТНОГО ОПЕРАТИВНОГО ЗАПОМИНАЮЩЕГО УСТРОЙСТВА С МАЛЫМ ЭНЕРГОПОТРЕБЛЕНИЕМ | 2012 |
|
RU2573757C2 |
| Способ изготовления магниторезистивных наноструктур | 2021 |
|
RU2767593C1 |
| МНОГОРАЗРЯДНАЯ ЯЧЕЙКА МАГНИТНОГО ОПЕРАТИВНОГО ЗАПОМИНАЮЩЕГО УСТРОЙСТВА С УЛУЧШЕННЫМ ПОЛЕМ СЧИТЫВАЕМОСТИ | 2011 |
|
RU2556325C2 |
| Вихревой спиновый диод, а также приемник и детектор на его основе | 2019 |
|
RU2731531C1 |
| СПИНТРОННОЕ УСТРОЙСТВО ГЕНЕРИРОВАНИЯ СВЕРХВЫСОКОЧАСТОТНЫХ КОЛЕБАНИЙ | 2018 |
|
RU2690217C1 |
| Спинтронный детектор терагерцовых колебаний | 2021 |
|
RU2778980C1 |
Изобретение относится к области приборостроения и может найти применение в датчиках измерения углового положения распределительного вала в двигателе автомобиля. Технический результат - расширение нефункциональных возможностей. Для достижения данного результата чувствительный элемент с гигантской магниторезистивностью (ГМР) выполнен в виде восьми резистивных элементов с ГМР с вращательно-симметричным расположением. При этом резистивные элементы соединены между собой по схеме, образующей два полных моста Уитстона. Чувствительный элемент с ГМР наиболее пригоден для применения в составе датчика угла поворота, для определения абсолютного углового положения распределительного вала или коленчатого вала в двигателе автомобиля. 2 н. и 5 з.п. ф-лы, 8 ил.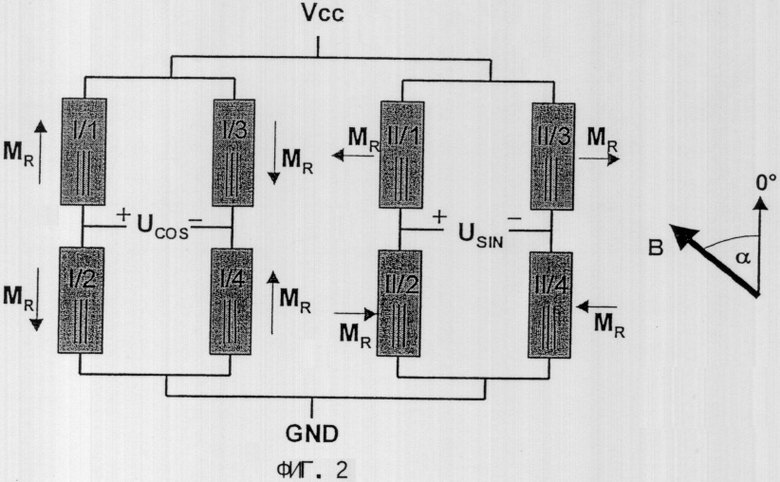
| US 2002006017 A1, 17.01.2002 | |||
| US 5602471 A, 11.02.1997 | |||
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 1998 |
|
RU2139602C1 |
| Магниторезистивный датчик перемещений | 1982 |
|
SU1027657A1 |
| DE 4408078 A, 14.09.1995 | |||
| Электрофильтр с автоматической очисткой от пыли | 1948 |
|
SU79298A1 |

