Изобретение относится к электроэнергетике и может быть использовано при создании приборов для определения места повреждений (ОМП) линий электропередачи и связи (ЛЭП и С).
Известные способы ОМП ЛЭП и С [А.с. СССР №1385108, А.с. СССР №1531037, Патент РФ №2073253] основаны на импульсном методе без использования модуляции: в линию посылают немодулированные зондирующие сигналы, принимают отраженные от неоднородностей мест повреждений сигналы и определяют место повреждения по временной задержке отраженных от места повреждения сигналов относительно зондирующих.
Недостатком этих известных способов является низкая точность измерений.
Наиболее близким техническим решением к предлагаемому способу и устройству является способ ОМП ЛЭП и С и устройство для его осуществления [Патент РФ №2073253, Кл. G01R 31/11, 1997]. Способ основан на посылке в линию зондирующих импульсов напряжений, приеме отраженных импульсов, запоминании значений напряжения с линии для каждого значения временной задержки, определении места повреждения по временной задержке отраженного импульса относительно зондирующего. С целью повышения достоверности и точности измерений, исключения паразитных переотражений от линии входа производят согласование выходного сопротивления генератора зондирующих импульсов с волновым сопротивлением линии циклически: в первом цикле запоминают половину амплитуды зондирующего импульса при отключении линии, во втором цикле измеряют амплитуду зондирующего импульса при произвольно установленном значении выходного сопротивления на входе подключенной линии, вычитают из нее величину, запомненную в первом цикле согласования, запоминают знак и величину результата вычитания, в третьем цикле согласования по результатам измерений первого и второго циклов вычисляют величину волнового сопротивления и по его цифровому коду устанавливают выходное сопротивление генератора зондирующих импульсов с заданной точностью.
Устройство для осуществления способа содержит блок синхронизации, вычислительный блок, генератор зондирующих импульсов, выполненный в виде последовательно соединенных формирователя зондирующих импульсов и блока управляемого выходного сопротивления, блок индикации.
Этот способ и осуществляющее его устройство имею также низкую точность измерений.
Задачей изобретения явилось повышение точности измерения расстоянии до места повреждения.
Указанная задача решается способом ОМП ЛЭП и С, заключающимся в посылке в линию зондирующих импульсов напряжения от генератора при согласовании выходного сопротивления последнего с волновым сопротивлением линии в соответствии с заданным диапазоном волновых сопротивлений и требуемой точностью согласования, приеме отраженных импульсов, определении места повреждения по временной задержке отраженного импульса относительно зондирующего, далее излучают дополнительные зондирующие импульсы напряжения, мгновенные значения напряжения которых получены одной или суммой нескольких гармонических составляющих, принимают отраженные дополнительные импульсы в моменты времени, соответствующие предварительно определенному месту повреждения, подвергают принятые отраженные дополнительные импульсы спектральному анализу, а информацию о месте повреждения уточняют по значениям фазочастотных спектров.
Сущность способа заключается в дополнительном использовании импульсов для ОМП ЛЭП и С, позволяющих реализовать фазовые методы радиодальнометрии и уточнить дальность до места повреждения, определенную предварительно на основе импульсных методов [Радиотехника: Энциклопедия / Под ред. Ю.Л.Мазора, Е.А.Мачусского, В.И.Правды. - М.: Издательский дом "Додека - XXI", 2002. - С.472-474].
Поскольку ошибка измерения дальности при ОМП связана непосредственно с ошибкой измерения времени запаздывания, то можно характеризовать повышение точности измерения дальности уменьшением ошибок измерения времени запаздывания.
Известно [Теоретические основы радиолокации. Под ред. Ширмана Я.Д. Учебное пособие для ВУЗов - М.: Советское радио, 1970, стр.190], что среднеквадратическая ошибка (стандартное отклонение) измерения времени запаздывания определяется выражением

где q - отношение сигнал/шум, ПЭ - эффективная полоса сигнала.
При этом для импульсных измерений без модуляции полоса ПЭ1 сигнала [Теоретические основы радиолокации. Под ред. Ширмана Я.Д. Учебное пособие для ВУЗов - М.: Советское радио, 1970, стр.340-343] определяется длительностью импульса
 таким образом
таким образом
При использовании фазовых методов дальнометрии с применением, например, двухчастотного излучения (f1, f2) эффективная полоса сигнала ПЭ2 имеет наибольшую ширину [Теоретические основы радиолокации. Под ред. Ширмана Я.Д. Учебное пособие для ВУЗов - М.: Советское радио, 1970, стр.191] и равна
ПЭ2=π(f2-f1),
где π=3.1415926, а потенциально достижимая точность,
Найдем отношение στ1/στ2, показывающее увеличение точности измерений времени запаздывания, с помощью фазовых методов

В трактах высокочастотной обработки ЛЭП возможно излучение зондирующего сигнала в пределах полосы Пu=(f2-f1)=106 Гц=1 МГц [Шалыт Г.М. Определение мест повреждения в электрических сетях. - М.: Энергоатомиздат, 1982].
Таким образом, фазовые методы радиодальнометрии обладают в π=3.1415926 раз более высокой потенциальной точностью измерения времени запаздывания, а следовательно и точностью ОМП. Например, при одинаковых отношении сигнал/шум q, для импульсных измерений без модуляции с полосой сигнала ПЭ1=500 кГц ошибка по ОМП согласно выражению
σR=υστ,
где σR - ошибка по расстоянию до места повреждения, υ≈0.98c≈294000000 м/с,
υ - скорость распространения электромагнитных колебаний в ЛЭП и С, с - скорость света,
составит 588 метров, а при использовании фазовых методов дальнометрии с применением двухчастотного излучения (f1-f2)=500 кГц составит 187 метров.
С другой стороны, в предлагаемом способе ОМП ЛЭП и С последовательно применяются импульсный и фазовый методы дальнометрии, обладающие разными и независимыми инструментальными ошибками. Поэтому их совместное использование повысит точность измерения дальности ОМП.
Предлагаемый способ может быть реализован с помощью устройства, содержащего вычислительный блок и связанные с ним генератор зондирующих импульсов, приемник и блок индикации, в котором установлен управляемый переключатель с каналом управления от вычислительного блока, выполненный с возможностью подключения к линии электропередачи или связи, при этом по меньшей мере один выход генератора зондирующих импульсов и один вход приемника связаны с указанным переключателем.
Генератор зондирующих импульсов может быть собран из следующих элементов: блок управляемого сопротивления (имеется в прототипе), блок памяти, цифроаналоговый преобразователь и усилитель мощности.
В качестве вычислительного блока целесообразно использовать микроЭВМ, содержащую шину адресов, данных и управления, модуль процессора, устройство управления клавиатурой и модуль памяти, а в качестве приемника - устройство, содержащее смеситель и аналого-цифровой преобразователь с управляемым усилением.
Заявляемое техническое решение поясняется чертежами.
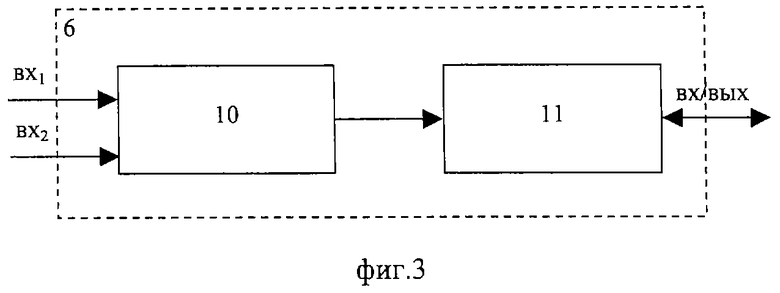
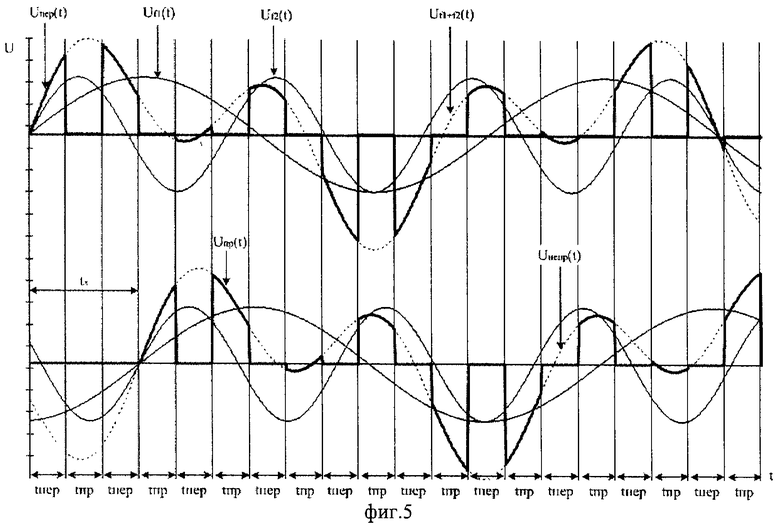
На фиг.1 представлена блок-схема устройства для определения места повреждения линий электропередачи и связи. На фиг.2 и 3 представлены устройства соответственно вычислительного блока и приемника. На фиг.4 и 5 представлены примеры квазинепрерывных колебаний.
Устройство для определения места повреждения линий электропередачи и связи содержит генератор зондирующих импульсов 1, состоящий из блока управляющего выходного сопротивления 2, блока памяти 3, цифроаналогового преобразователя 4 и усилителя мощности 5, приемник 6, вычислительный блок 7 (например, микроЭВМ), блок индикации 8, управляемый переключатель 9.
Приемник 6 (фиг.3) содержит смеситель 10 и аналого-цифровой преобразователь с управляемым усилением 11.
Вычислительный блок 7 (фиг.2) в общем случае может представлять собой микроЭВМ, содержащую шину адресов, данных, управления 12, модуль процессора 13, устройство управления клавиатурой 14, модуль памяти 15.
Устройство работает следующим образом. На первом этапе работа устройства аналогична прототипу и применяются немодулированные импульсные сигналы (немодулированные зондирующие импульсы).
Перед процедурой ОМП ЛЭП или С производят согласование выходного сопротивления генератора зондирующих импульсов 1 (фиг.1) с волновым сопротивлением линии, подключенной через управляемый переключатель 9 к выходу блока управляемого выходного сопротивления 2. Режим согласования устанавливают блоком 14 вычислительного блока 7 (фиг.2) в соответствии с заданным диапазоном волновых сопротивлений и требуемой точностью согласования.
Управляемый переключатель 9 переводится в режим, при котором блокируется вход приемника 6 на время излучения немодулированного зондирующего импульса.
После завершения процесса согласования выходного сопротивления генератора 1 под воздействием команд блока 14 микроЭВМ модуль процессора 13 с участием программного обеспечения, хранящегося в модуле памяти 15, производит расчет цифровых кодов дискретных значений немодулированного импульса заданной длительности tu. Цифровые коды с выхода 1 микроЭВМ 7 поступают в блок памяти 3 генератора зондирующих импульсов 1, где записываются и хранятся. Выбор параметров зондирующего немодулированного импульса (например, амплитуды, длительности, несущей частоты) производится, исходя из требуемой точности измерений с учетом параметров ЛЭП и С. Под воздействием управляющих сигналов с первого выхода микроЭВМ 7 цифровые коды отсчетов немодулированного импульса поступают на цифроаналоговый преобразователь 4 и далее на усилитель мощности 5, на выходе которого формируется зондирующий импульс. Проходя через блок управляемого выходного сопротивления и управляемый переключатель 9, импульс поступает в линию, а с выхода усилителя мощности 5 при необходимости на первый вход приемника и участвует в качестве опорного сигнала для смесителя 10.
В случае зеркального отражения от места повреждения (например, места короткого замыкания ЛЭП) на вход 2 приемника 6 отраженный импульс поступит с временной задержкой tз, по отношению к излученному импульсу (времени запуска генератора зондирующих импульсов). Возможна демодуляция (преобразование на пониженную частоту высокочастотного заполнения) в смесителе 10 приемника 6 с помощью опорного сигнала генератора зондирующих импульсов. С выхода смесителя 10 отраженный сигнал поступает на модуль аналого-цифрового преобразования (АЦП) с управляющим усилением 11 для усиления и преобразования в цифровую форму. Усиление является управляемым, поскольку коэффициент усиления модуля 11 может изменяться под воздействием сигналов с входа/выхода микроЭВМ 7 на вход/выход приемника 6. Цифровые отсчеты принятого сигнала через вход/выход и шину адресов, данных, управления 12 подаются на модуль процессора 13 для предварительного вычисления расстояния до повреждения. Грубый расчет расстояния R до повреждения производится по зафиксированному блоком 7 микроЭВМ временному запаздыванию tз между излученным и принятым немодулированным импульсом по формуле 
где υ - скорость распространения электромагнитных колебаний в ЛЭП.
Результаты предварительного расчета дальности до места повреждения могут отображаться на блоке индикации 8.
Для уточнения грубой оценки дальности до места повреждения возможно излучение нескольких одиночных немодулированных импульсов либо их пачек с последующей совместной обработкой. Для каждого из таких излучений целесообразно применение процедуры согласования волнового сопротивления.
На втором этапе работа устройства базируется на применении фазовых методов дальнометрии.
Измерение дальности фазовыми методами основывается на измерении приращения фазы излученного гармонического колебания стабилизированной частоты за время запаздывания отраженного сигнала [Радиотехника: Энциклопедия / Под ред. Ю.Л.Мазора, Е.А.Мачусского, В.И.Правды. - М: Издательский дом "Додека-XXI", 2002 г. - стр.473].
Например, передатчик излучает синусоидальное колебание частоты f0 с некоторой начальной фазой ϕ0
ϕпер=2πf0t+ϕ0.
Отраженный сигнал поступает в приемник с фазой
ϕпр=2πf0(t-tз)+ϕ0+Δϕ,
где Δϕ - сдвиг фазы при отражении (как правило близок к 180°).
Время запаздывания tз, однозначно определяющее дальность до места повреждения R, рассчитывается как

а фазовый набег составит

Учитывая известное Δϕ, приходим к уравнениям
или
связывающим искомую дальность до повреждения R с измеряемой разностью фаз θ'=θ+Δϕ.
Частота f0 и длина волны  называются масштабными, поскольку от них зависит масштаб измерения дальности, т.е. коэффициент между измеряемым фазовым сдвигом θ' и дальностью до места повреждения R.
называются масштабными, поскольку от них зависит масштаб измерения дальности, т.е. коэффициент между измеряемым фазовым сдвигом θ' и дальностью до места повреждения R.
Через фазовые интервалы θ'=2π гармоническое колебание, а вместе с ним и показания фазометра повторяются, при этом диапазон однозначного измерения дальности будет составлять

Выбирая длину волны в соответствии с этим выражением, можно обеспечить измерения дальности до места повреждения в любых диапазонах. Так, например, для Rmax=Rодн=300 км требуется длина волны λ=600 км и соответствующая масштабная частота f0=500 Гц. При этом инструментальная точность измерения дальности оказывается измеренной и составляет 0.8км на каждый градус шкалы фазометра.
Существенной особенностью и методическим ограничением применения фазовых методов для ОМП ЛЭП и С является необходимость разнесенного приема - передачи при излучении непрерывных колебаний. Одновременного излучения и приема гармонических колебаний на фиксированной частоте в ЛЭП реализовать невозможно [Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Сов. радио, 1964 г, стр.25]. Для преодоления указанного ограничения, авторами предлагается использование квазинепрерывных колебаний [Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех, - М.: Радио и связь, 1984 г., стр.114] (например, фиг.4, 5) с последующим восстановлением непрерывного колебания.
При этом исходное непрерывное колебание заменяется соответствующими периодическими отрезками (импульсами) (фиг.4, 5). Период следования отрезков (импульсов), их длительность и скважность определяют в зависимости, например, от длины ЛЭП или С, предполагаемого расстояния до места повреждения, требуемой точности ОМП ЛЭП и С.
Недостатки упрощенного фазового метода:
- малый диапазон однозначного измерения дальности при использовании высокочастотных колебаний;
- неизвестная величина сдвига фазы Δϕ при отражении от невыясненного повреждения;
- устраняются за счет применения многочастотных сигналов [Радиотехника: Энциклопедия / Под ред. Ю.Л.Мазора, Е.А.Мачусского, В.И.Правды. - М: Издательский дом "Додека-XXI", 2002 г. - стр.473-474].
Так, при двухчастотной фазовой дальнометрии используют масштабную частоту, образованную в результате биений [Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. Учебное пособие для вузов. - М.: Сов. радио, 1970 г., стр.191, Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Сов. радио, 1964 г., стр.22-25] синусоидальных колебаний двух несущих частот f1 и f2 с начальными фазами ψ1 и ψ2.
В приложении к предлагаемому устройству (фиг.1) в ЛЭП излучают квазинепрерывный сигнал, представляющий собой импульсы суммарных колебаний частот f1 и f2 (фиг.5). В формировании таких импульсов участвуют блоки 7, 3, 4, 5, а блок управляемого сопротивления 2 и управляемый переключатель 9 обеспечивают их согласованное излучение в требуемые моменты времени.
Управляемый переключатель 9 участвует не только в излучении импульсных сигналов, но и в приеме отраженных сигналов только в заданные периоды времени. Эти заданные периоды времени определяются расстоянием R до места повреждения, определенным на первом этапе работы устройства, ошибками измерения места повреждения первого этапа с учетом скорости распространения электромагнитных колебаний в ЛЭП υ. Таким образом управляющий переключатель 9 в соответствии с управляющими сигналами вычислительного блока 7 обеспечивает совмещение излучения и приема сигналов при реализации фазовых методов ОМП ЛЭП и С.
На вход приемника 6 поступают отраженные сигналы из области предполагаемого места повреждения и последующие процедуры выполняются для уточнения расстояния до повреждения.
Частоты f1, f2 (для двухчастотной фазовой дальнометрии) выбираются близкими по значениям и для них фазовые сдвиги, обусловленные отражением от места повреждения и задержки в компонентах устройства, можно считать одинаковыми.
После преобразования в цифровую форму в приемнике 6 отраженный сигнал поступает в вычислительный блок 7 для вычисления фазочастотного спектра (ФЧС). Получение ФЧС отраженного сигнала может производиться с использованием, например, алгоритмов дискретного (быстрого) преобразования Фурье. При этом разность фаз составляющих ФЧС отраженного сигнала на частотах f1 и f2 будет связана со временем запаздываниям tз=2R/υ и составлять
ϕ11=2π(f1-f2)(t-2R/υ)+(ψ1-ψ2)=2πΔf(t-2R/υ)+(ψ1-ψ2).
Разность фаз θ между частотными составляющими при излучении
ϕ1=2π(f1-f2)t+(ψ1-ψ2)=2πΔft+(ψ1-ψ2)
и при приеме отраженного сигнала ϕ11 характеризует дальность до места повреждения
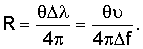
θ=ϕ1-ϕ11=2πΔf(t-t+2R/υ)+(ψ1-ψ2)-(ψ1-ψ2)=4πΔfR/υ=4πR/Δλ.
Таким образом, при использовании двухчастотного метода дальность до места повреждения может быть вычислена блоком 7 по формуле
Результаты расчетов индуцируются блоком 8.
Совокупное определение дальности до места повреждения при поэтапном использовании немодулированного излучения и фазовых методов дает более точный результат ОМП ЛЭП и С.
Устройство (фиг.1) позволяет реализовать и другие (многочастотные) фазовые методы дальнометрии для повышения точности ОМП ЛЭП и С. Выбор метода определяется требованиями к точности ОМП ЛЭП и С и условиями проведения измерений.


Изобретение относится к электроэнергетике и может быть использовано при создании приборов для определения места повреждений линий электропередачи и связи. Сущность: посылают в линию зондирующие импульсы напряжения. Определяют место повреждения по временной задержке отраженного импульса относительно зондирующего. Далее излучают квазинепрерывный колебательный сигнал, представляющий собой импульсы напряжения, мгновенные значения напряжения которых получены суммой гармонических составляющих двух и более частот. Принимают отраженный сигнал в моменты времени, соответствующие предварительно определенному месту повреждения. Уточняют дальность до места повреждения по фазочастотному спектру. Устройство содержит вычислительный блок и связанные с ним генератор зондирующих импульсов, приемник, блок индикации, управляемый переключатель с каналом управления от вычислительного блока. Переключатель выполнен с возможностью подключения к контролируемой линии электропередачи или связи. При этом по меньшей мере один выход генератора зондирующих импульсов и один вход приемника связаны с переключателем. 2 н. и 3 з.п. ф.-лы, 5 ил.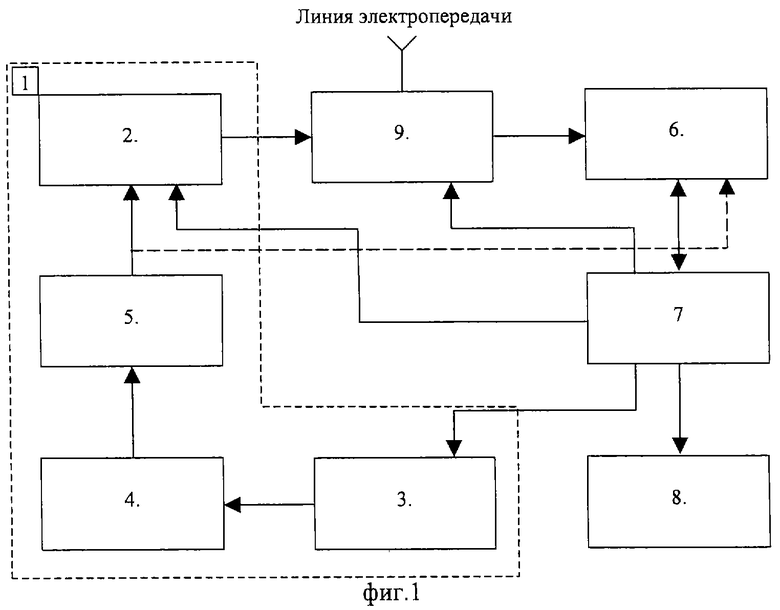
| RU 2073253 C1, 10.02.1997 | |||
| Устройство для определения расстояния до места повреждения линии интерфейса ввода-вывода | 1980 |
|
SU920577A1 |
| Способ определения расстояния до места повреждения линий электропередачи и связи и устройство для его осуществления | 1986 |
|
SU1385108A1 |
| Устройство для определения расстояния до места повреждения линий электропередач и связи | 1984 |
|
SU1180816A2 |
| JP 6082512 A, 22.03.1994 | |||
| US 6011399 A, 04.01.2000 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |

