Изобретение «Способ и устройство измерения сопротивления твердых тканей зубов биообъектов» относится к медицине и может быть использовано в стоматологии для измерения сопротивления твердых тканей зубов биообъектов в целях диагностики их состояния как до и во время лечения, так и для контроля результатов лечения посредством постоянного зондирующего электрического сигнала, а также для измерения сопротивлений тканей других биологических объектов. Известен способ, в котором для диагностики состояния тканей зубов, воздействуют на исследуемую локальную область зуба постоянным электрическим зондирующим сигналом с последующим измерением силы тока на выходе исследуемой локальной области зуба посредством пассивного и активного электродов и измерительного прибора. По величине измеренного тока диагностируют состояние тканей исследуемых зубов (см., например, А.с. №2239357, кл. А61В 5/05, «Способ диагностики деминерализации эмали постоянного зуба» авторы Рамм Н.Л., Кисельникова Л.П. дата публ. 2004.04.27, А.с. №1822747, кл. А61В 5/05 «Способ диагностики кариеса». Авторы В.К.Леонтьев, Т.Н.Жорова, Г.Г.Иванова и А.И.Иванов, дата публ. 23.06.93. Бюл. №23).
Наиболее близким по технической сущности к предлагаемому способу является А.с. №1822747, кл. А61В 5/05 «Способ диагностики кариеса». Авторы В.К.Леонтьев, Т.Н.Жорова, Г.Г.Иванова и А.И.Иванов, дата публ. 23.06.93. Бюл. №23. Согласно способу посредством активного и пассивного электродов пропускают через твердые ткани исследуемого зуба электрический ток силой 100 мкА при напряжении 3 В в период прорезывания зуба, затем через 4 и 5 месяцев по изменению электропроводности диагностируют состояние тканей исследуемого зуба.
Однако в существующих способах не указан способ измерения тока, а указаны только нормирующие значения тока, при которых осуществляется постановка диагноза. Использование стандартного способа и устройства измерения силы тока в прототипе из-за значительной погрешности измерения тока (десятые и сотые доли мкА) и зависимости результатов измерения силы тока от стабильности источника напряжения, формирующего электрический зондирующий сигнал, влечет за собой низкую достоверность диагностики. Низкая достоверность диагностики обусловлена большой вариабельностью и, следовательно, плохой воспроизводимостью результатов измерения. Применение стандартных устройств, например прибора типа М-2001, указанного в прототипе, приводит к возникновению дополнительных погрешностей смещения, в том числе за счет возникновения эффекта поляризации в контакте активный электрод - исследуемый биообъект.
Кроме того, погрешность и нестабильность измерения силы тока малого уровня значительно сокращает допустимый динамический диапазон измерения с заданной погрешностью. Снижение допустимого динамического диапазона измерения приводит к сокращению функциональных возможностей диагностики различных стадий, видов и форм заболевания зубов кариесом с допустимой достоверностью и к ограничению сферы применения предложенного способа для диагностики других биообъектов.
Известно, что прямым показателем состояния тканей зубов является активное сопротивление, которое непосредственно зависит от патологических изменений состояния и структуры канальцев, составляющих основу дентина. См., например, статью Батюкова Н.М., Ивановой Г.Г., Тихонова Э.П., Касумовой М.К., Мчедлидзе Т.Ш., Тихонова Э.П. «Системный анализ твердых тканей зубов на основе оптического, рентгеновского и электрического сигналов» - Институт стоматологии, №1 (34), 2007 г., с.102-104. Установлено, что динамический диапазон возможных значений в целях диагностики измеряемого активного сопротивления (в дальнейшем просто сопротивления) состояния твердых тканей зубов биообъектов перекрывает величину 108 при допустимом максимальным токе зондирующего электрического сигнала, не превышающем 100 мкА, на 3-х В на нижней границе динамического диапазона измеряемого активного сопротивления. Минимальный ток зондирующего сигнала определяется чувствительностью технического устройства, посредством которого выполняется измерение сопротивления на верхней границе динамического диапазона. На верхней границе динамического диапазона в 100 мОм при установленных ограничениях на верхний предел напряжения зондирующего сигнала в 3 В снижение тока, проходящего через исследуемую локальную область зуба или других биообъектов, достигает величин, лежащих вне предела чувствительности, установленных даже у современных цифровых измерительных устройств. Кроме того, величина тока становится соизмеримой с величиной нестабильности образцового источника тока, формирующего зондирующий электрический сигнал. Проблема измерения величины сопротивления для прохождения тока через твердые ткани зубов биообъектов, возникает не только из-за конечной чувствительности устройств измерения высокоомных сопротивлений резисторов, а также из-за влияния других факторов, в том числе конечного значения сопротивления изоляции, например сопротивления изоляции печатной платы, на которой устанавливаются при монтаже электронные компоненты схемы. В частности, при использовании четырехплечего резистивного моста для того, чтобы определить разбалансировку моста в 1 кОм на фоне измеряемого сопротивления прохождению тока биообъекта в 5·107 Ом при указанных параметрах электрического зондирующего сигнала, необходимо, чтобы нуль-орган, включенный в диагональ моста, почувствовал бы сигнал в 3,6·10-2 мкВ. Такую высокую чувствительность при обычном схемотехническом решении практически невозможно получить даже при использовании таких современных электронных компонентов, как инструментальный усилитель типа INA 118 фирмы BURR-BROWN Corporation и нуль-орган типа LP311.
Поэтому в указанных условиях возникает проблема поиска способов и устройств прямого цифрового измерения сопротивлений биообъектов в широком динамическом диапазоне с заданной приведенной погрешностью измерения.
Известны способы измерения активного сопротивления в цифровой форме посредством применения дельта-сигма АЦП совместно с мостами сопротивлений (см., например, стр.373-379 книги: «Сопряжение датчиков и устройств ввода данных с компьютерами IBM PC»: Пер. с англ. / Под редакцией У.Томпкинса и Дж. Уэбстера. - М.: «Мир», 1992. - 592 с, ил., а также статью «Особенности применения дельта-сигма АЦП совместно с мостами сопротивлений в измерительных устройствах». Павел Вовк, «Чип Ньюс Украина», №2 (42), март 2005 г.). Цифровая форма представления результатов измерения приводит к уменьшению погрешности измерения и к расширению динамического диапазона измеряемой величины, в том числе сопротивления.
Однако в указанных способах измерение сопротивления и преобразование его в цифровой код осуществляется косвенно, то есть преобразуется в цифровой код электрический сигнал, пропорциональный разбалансировке резистивного моста, что приводит к ограничению допустимого динамического диапазона искомого сопротивления и точности его измерения. Снижение точности цифрового измерения сопротивления известными способами и устройствами в широком динамическом диапазоне (от десятков единиц Ом до 108 Ом и выше) связано также с ограничениями зондирующего тока, проходящего через исследуемую область биообъекта, которая не должна превышать 100 мкА на нижнем пределе динамического диапазона. В этих условиях основные факторы, приводящие к увеличению погрешности цифрового измерения сопротивления исследуемых локальных областей биообъектов, известными способами фактически не могут быть устранены в достаточной мере для проведения достоверной диагностики состояния биообъектов. К этим основным факторам, влияющим на достоверность диагностики, при использовании известных способов цифрового измерения или аналого-цифрового преобразования сопротивлений биообъектов следует, в первую очередь, отнести: воздействие высокочастотных шумов; нестабильность источника электрического зондирующего сигнала; наличие синфазного сигнала (наводка силовой сети с частотой 50 Гц); смещение и дрейф нуля аналоговых элементов (усилителей). Наиболее существенный дестабилизирующий фактор связан с влиянием на результаты измерения высокочастотных шумов.
Известно мостовое устройство для многоточечного определения импедансных характеристик биообъектов (а.с. №2104668, кл. 6 А61В 5/05, опубл. 1998.02.20). Данное устройство с целью расширения функциональных возможностей и повышения точности измерения импедансных характеристик биообъектов содержит: генератор переменного напряжения; четырехплечую мостовую измерительную цепь, образованную первым, вторым и третьим элементами; первый и второй операционный усилитель; масштабный усилитель, вход которого соединен с выходом второго операционного усилителя; амплитудный выпрямитель, вход которого соединен с выходом масштабного усилителя; АЦП, вход которого соединен с выходом амплитудного выпрямителя; вычислительное устройство, вход которого соединен с выходом АЦП; два мультиплексора, одноименные входы которых соединены параллельно. Выход первого мультиплексора соединен с выходом второго операционного усилителя и входом масштабного усилителя, а выход второго мультиплексора соединен с инвертирующим входом второго операционного усилителя и выводом первого элемента четырехплечей мостовой измерительной цепи. Первый выход вычислительного устройства соединен с выходом управления первого элемента, а третий выход с входом управления третьего элемента четырехплечей мостовой измерительной цепи. Четвертый выход вычислительного устройства соединен с входом управления масштабного усилителя, а n-е число измерительных электродов соединены с входами мультиплексоров.
Недостатком данного устройства является использование переменного электрического зондирующего сигнала, что влечет за собой необходимость использования для измерения активной составляющей импеданса биообъекта дополнительных преобразований и, тем самым, таких элементов схемы устройства, как генератор и амплитудный выпрямитель, что приводит к увеличению погрешности измерения активной составляющей погрешности измерения. Кроме того, реализация в мостовой схеме известного способа цифрового измерения импеданса, в том числе активной составляющей, осуществляется косвенно, то есть преобразуется в цифровой код электрический сигнал, пропорциональный разбалансировке резистивного моста, что приводит к дополнительному снижению допустимого динамического диапазона искомого активного сопротивления и точности его измерения. Увеличение числа электродов для исключения влияния импеданса кожи на точность цифрового измерения активной составляющей импеданса при измерении активного сопротивления тканей зубов не может быть применено из-за невозможности использования n-го числа активных электродов.
Наиболее близким по технической сущности к предлагаемому изобретению является изобретение: «Устройство для измерения активной и емкостной составляющих импеданса биологических тканей» RU №2196404 С2, кл. А61В 5/053, 20.01.2003, которое относится к биофизике и медицинской технике и может быть использовано в медицине для экспресс-диагностики различных заболеваний и количественной оценки степени патологических изменений в тканях и органах. Устройство работает по четырехэлектродной схеме и состоит из генератора синусоидальных напряжений, широкополосного усилителя с автоматической регулировкой усиления для поддерживания измерительного тока заданной амплитуды, фазочувствительного измерителя разности двух напряжений, усилителя постоянного напряжения, блока индикации, а также блоков цепей обратной связи и управления.
Недостатком данного устройства, так же как и устройства по а.с. №2104668, является использование переменного электрического зондирующего сигнала, что влечет за собой необходимость использования для измерения активной составляющей импеданса биообъекта дополнительного аналогового преобразования на фазочувствительном измерителе разности падения напряжения на исследуемом участке биообъекта с последующим усилением и аналого-цифровым преобразованием полученной усиленной разности напряжения, что приводит к существенному увеличению погрешности измерения активной составляющей погрешности измерения. Действительно, преимущество цифрового измерения в данном случае сводится только к удобству представления результатов измерения в цифровой форме и не оказывает влияние на снижение погрешности измерения. Кроме того, реализация в предложенной схеме цифрового измерения импеданса, в том числе активной составляющей, осуществляется косвенно, то есть преобразуется в цифровой код электрический сигнал, пропорциональный разбалансировке резистивного моста, что приводит к дополнительному снижению допустимого динамического диапазона искомого активного сопротивления и точности его измерения. Данная схема измерений, к тому же, не устраняет составляющую погрешности, возникающую из-за нестабильности источника зондирующего электрического сигнала.
Увеличение числа электродов для исключения влияния импеданса кожи на точность цифрового измерения активной составляющей импеданса при измерении активного сопротивления тканей зубов не может быть применено из-за сложности установки соответствующего числа электродов на зубе. Следует также заметить, что влияние электрических свойств границы раздела электрод - биологическая ткань оказывает существенное влияние на измерение активной составляющей импеданса в том случае, когда измеряемая активная составляющая импеданса по величине соизмерима с активной составляющей импеданса границы раздела электрод - биологическая ткань. Активное сопротивление тканей зубов электрическому току, даже при их патологическом разрушении, существенно превышает соответствующую составляющую сопротивления границы раздела, так как при измерении активной составляющей сопротивления тканей зубов в качестве активного электрода используется сточенная игла шприца, заполненного калием хлорида, что приводит к значительному уменьшению активной и реактивной составляющих импеданса границы раздела электрод - ткани зуба по сравнению с измеряемым сопротивлением.
Таким образом, указанные известные способы и устройства не могут обеспечить цифровое измерение сопротивления тканей зубов в динамическом диапазоне от десятков до 108 Ом при максимальном значении тока зондирующего сигнала на нижнем значении динамического диапазона сопротивлений, равном 100 мкА, даже при напряжении зондирующего электрического сигнала более рекомендованного 3 В, но не превышающем допустимое напряжение в 8-9 В. При этом влияние основных схемотехнических факторов на погрешность цифрового измерения сопротивления исследуемых локальных областей зуба известными способами и устройствами невозможно устранить, по крайней мере, за время, не превышающее нескольких секунд.
Заявляемая группа изобретений предназначена для решения задачи снижения погрешности измерения сопротивления твердых тканей зубов биообъектов электрическому сигналу и, тем самым, способствует повышению достоверности, воспроизводимости и надежности диагностики состояния твердых тканей зубов биообъектов, в том числе, при обнаружении ранних стадий кариеса. Заявляемая группа изобретений сможет обеспечить также контроль состояния тканей зубов по величине изменения их сопротивления в процессе лечения и профилактики посредством применения зондирующего постоянного электрического сигнала с низком уровнем напряжения. Кроме того, расширяются функциональные возможности диагностики и номенклатуры исследуемых биообъектов за счет увеличения динамического диапазона измеряемого сопротивления (до 108 и выше). Данная задача может быть решена с помощью предлагаемого способа цифрового измерения сопротивления тканей зубов биообъектов электрическому сигналу посредством устройства, реализующего данный способ, в виде портативного микропроцессорного прибора. Этот прибор, помимо непосредственного представления результатов измерения и диагностики на собственном жидкокристаллическом дисплее (ЖКД) в цифровой форме, обладает дополнительными функциями запоминания и передачи полученной информации в цифровой форме стандартными методами на ПЭВМ верхнего уровня. На ПЭВМ верхнего уровня может быть осуществлена полная автоматизация и визуализация процесса диагностики по результатам измерения, в том числе в форме томографических образов исследуемой области зуба, а также архивация полученной информации в виде базы данных по исследуемым пациентам (см. «Системный анализ твердых тканей зубов на основе оптического, рентгеновского и электрического сигналов» - Институт стоматологии, №1 (34), 2007 г., с.102-104).
Техническим результатом способа измерения сопротивления твердых тканей зубов биообъектов является снижение погрешности измерения сопротивления твердых тканей зубов биообъектов при большом разбросе нормирующих показателей для любых типов зубов у различных пациентов, независимо от возраста, и расширении динамического диапазона измеряемых сопротивлений при сохранении в заданных пределах постоянного тока зондирующего электрического сигнала. Следствием чего является расширение функциональных возможностей диагностики состояния твердых тканей зубов биообъектов, в том числе для обнаружения на ранних стадиях воспалительных процессов мягких и твердых тканей биообъектов.
Техническим результатом устройства для измерения твердых тканей зубов биообъектов является повышение его точности при прямом измерении сопротивления в цифровой форме исследуемой локальной области зуба и других биообъектов электрическому току за счет устранения составляющих погрешностей, связанных с влиянием поляризации электродов на результаты измерений и нестабильности источника переменного электрического зондирующего сигнала. В результате, погрешность измерения по сравнению с известными устройствами может снижаться до долей процента для широкого динамического диапазона преобразования сопротивления в цифровой двоичный код, перекрывающего 108, при указанных выше параметрах зондирующего электрического постоянного сигнала, с запоминанием в цифровой форме, индикацией и, при необходимости, передачей результатов измерения на ПЭВМ верхнего уровня. При этом расширение динамического диапазона цифровых измерений при сохранении заданной приведенной погрешности измерения достигается за счет незначительного увеличения времени измерения, укладывающегося в допустимый для диагностики интервал времени.
Для достижения технического результата в способе измерения твердых тканей зубов биообъектов при воздействии на зубы электрическим постоянным сигналом посредствам пассивного и активного электродов полный динамический диапазон изменения сопротивления биообъектов на предварительном этапе исследования разбивают на конечное индексируемое (пронумерованное) число динамических поддиапазонов по допустимой величине приведенной погрешности аналого-цифрового преобразования измеряемого сопротивления. В пределах каждого динамического поддиапазона мажоритарно и последовательно в дискретные моменты времени через интервал, кратный 10 мс, по результатам воздействия постоянного электрического зондирующего сигнала определяют принадлежность сопротивления тканей соответствующему динамическому поддиапазону, начиная с минимального значения индекса, равного нулю. В пределах найденного и установленного поддиапазона аналого-цифровое преобразование измеряемого сопротивления тканей осуществляют комбинационно в последующие два этапа: мажоритарно и последовательно в дискретные моменты времени через интервал, кратный 10 мс, определяют для фиксированного числа разрядов значения каждого разряда последовательным уравновешиванием измеряемого сопротивления, изменяющимся образцовым сопротивлением, начиная со старшего разряда до некоторого фиксированного промежуточного разряда. Для оставшейся части младших разрядов на втором этапе в этом же поддиапазоне выполняют также мажоритарно через временной интервал равномерно распределенный в пределах от некоторого минимального значения до значения в 20 мс аналого-цифровое преобразование последовательным уравновешиванием измеряемого сопротивления тканей, изменяющимся образцовым сопротивлением с коррекцией на единицу младшего разряда в большую или меньшую сторону двоичного кода, полученного на предшествующих старших разрядах. Если же установлена принадлежность измеряемого сопротивления тканей динамическому поддиапазону с нулевым индексом, то в его пределах на первом этапе для фиксированного числа разрядов аналого-цифровое преобразование измеряемого сопротивления последовательным уравновешиванием, начиная со старшего разряда, осуществляют поразрядно, приписывая каждому разряду соответствующий ему вес уравновешивающего образцового сопротивления, а для оставшейся части младших разрядов в этом же поддиапазоне выполняют аналого-цифровое преобразование с коррекцией уравновешивающего сопротивления в большую или меньшую сторону на дискретную величину, соответствующую весу младшего разряда. При установлении принадлежности измеряемого сопротивления биообъектов динамическому поддиапазону с индексом, превышающем минимальное нулевое значение, на первом и втором этапах аналого-цифрового преобразования устанавливают для каждого разряда вес уравновешивающего образцового сопротивления по нелинейному закону, определяемому по величине результирующего сопротивления, равного параллельно подключенным измеряемому сопротивлению тканей в установленном динамическом поддиапазоне, отличному от веса поразрядного и следящего уравновешивания, установленного для динамического поддиапазона с нулевым индексом.
Если мажоритарно и последовательно в дискретные моменты времени через интервал, кратный 10 мс, устанавливают, что значение измеряемого сопротивления превышает выбранный динамический поддиапазон, то при переходе к динамическому поддиапазону с большим индексом синхронно с увеличением индекса изменяют в большую сторону, но в заданных пределах, величину напряжения электрического зондирующего сигнала.
При определении индекса динамического поддиапазона и при аналого-цифровом преобразовании в пределах установленного динамического поддиапазона изменяют полярность зондирующего электрического сигнала, приложенного к пассивному и активному электроду, каждый раз при переходе в уравновешивающем двоичном коде от разряда к разряду.
Для достижения технического результата в устройство для измерения сопротивления твердых тканей зубов биообъектов, содержащее электроды, источник опорного напряжения, нуль-орган, фильтр нижних частот, инструментальный усилитель и цифровое измерительное устройство с жидкокристаллическим дисплеем, введены регулятор опорного напряжения, ключи коммутации электродов, резистивный мост, в симметричные плечи которого включены шунтирующий делитель напряжения и образцовые резисторы с сопротивлениями одинакового номинала, делитель напряжения, выполненный в виде последовательно соединенных резисторов и ключей. Цифровое измерительное устройство с жидкокристаллическим дисплеем выполнено в виде микропроцессорной системы, включающей в себя микропроцессор с подключенными к нему клавиатурой, запоминающим устройством и схемой RS-232 интерфейса. При этом первая группа выходов микропроцессора соединена с управляющими входами регулятора опорного напряжения, вход которого связан с выходом источника опорного напряжения, а выход соединен с первой диагональю резистивного моста, вторая диагональ которого подключена к входам инструментального усилителя, выход которого через фильтр нижних частот подключен к первому входу нуль-органа, второй вход которого соединен с общей шиной, а его информационный выход подключен к информационному входу микропроцессора. Вторая группа выходов микропроцессора соединена с управляющими входами ключей коммутации электродов, входы которых соединены с электродами, а выходы подключены к входам шунтирующего делителя напряжения, управляющие входы которого соединены с третьей группой выходов микропроцессора. Четвертая группа выходов микропроцессора соединена с управляющими входами делителя напряжений, а его пятый выход - с управляющим входом нуль-органа.
Способ осуществляют следующим образом. На основании предварительных исследований определяют максимальный динамический диапазон изменения сопротивлений твердых тканей зубов биообъектов (в дальнейшем - тканей зубов). Для тканей зубов максимальный диапазон изменения сопротивлений составляет около 100 мОм, а минимальный диапазон может составлять от одного до нескольких десятков Ом. Величина динамического диапазона зависит от диаметра активного электрода. Чем больше диаметр активного электрода, тем в меньшую сторону сдвигается динамический диапазон. Однако диаметр активного электрода устанавливают из необходимости исследования труднодоступных фиссурных полостей зуба, что и ограничивает по величине диаметр активного электрода десятыми долями 1 мм и приводит к сдвигу динамического диапазона измеряемых сопротивлений в большую сторону, то есть до указанной по максимуму величины. По минимуму диаметр активного электрода ограничивается диаметром освоенной промышленностью инъекционной иглы, составляющей 0,3-0,45 мм.
Для принятой величины приведенной погрешности цифрового измерения сопротивления на основе расчета и предварительного эксперимента максимальный динамический диапазон разбивают на ряд динамических поддиапазонов. Предположим, что для заданной приведенной погрешности измерения установили приемлемый динамический поддиапазон в пределах от 0 до R0 кОм. Этому динамическому поддиапазону присваивают индекс 0. Для измерения сопротивления биообъекта, превышающего сопротивление резистора (в дальнейшем просто - сопротивление), равное R0, шунтируют измеряемое сопротивление тканей зубов таким образом, чтобы следующий динамический поддиапазон результирующего сопротивления уже с индексом 1 также укладывался в динамический поддиапазон с индексом 0, то есть имел бы нижнюю границу R0, а верхнюю границу - 2R0. Значения шунтирующих сопротивлений для формирования m-го динамического поддиапазона определяют по максимальному допустимому измеряемому сопротивлению тканей зубов Rxm в каждом поддиапазоне, выраженному через сопротивление R0 в соответствии с равенством Rxm=(1+m)R0, где m=entr[Rx/R0] (entr - оператор определения целой части от результата деления указанных в скобках сопротивлений); Rx(m-1) Rx Rxm; Rx - значение измеряемого сопротивления тканей зубов или просто измеряемого сопротивления. Параметр m показывает, во сколько целое число раз, измеряемое сопротивление Rx, превышает верхнюю границу динамического поддиапазона с индексом 0. Выразим для дальнейшего описания величину шунтирующего сопротивления через сопротивление R0 в виде произведения λ(m)·R0. Тогда результирующее сопротивление, принадлежащее соответствующему динамическому поддиапазону, образуют параллельным подключением измеряемого Rx и шунтирующего λ(m)·R0 сопротивления. Величину результирующего сопротивления по параллельно подключенным измеряемому Rx и шунтирующему λ(m)·R0 сопротивлениям находят в соответствии с формулой
где параметр α принимает значения в пределах, определяемых неравенством 0≤α≤1,так как измеряемое сопротивление Rx в динамическом диапазоне с индексом m=0,1,..., можно представить в виде Rx=R0(α+m).
Следовательно, значения безразмерной функции λ(m), по которой определяют величину шунтирующего сопротивления, находят из приведенного равенства при условии, что максимальное значение результирующего сопротивления для любого значения индекса m устанавливают в соответствии с равенством Rмакс=R0 при α=1. В соответствии с указанным равенством устанавливают конкретные значения безразмерной функции λ(m)
где при введенных ограничениях на максимальный динамический диапазон измеряемого сопротивления ограничиваются, например, следующими численными значениями m=0,1,2,3,4.
Из последнего уравнения следует, что при m=0 шунтирующее сопротивление равно бесконечности, иначе говоря, активный и пассивный электроды подключают непосредственно, например, в плечо четырехплечего резистивного моста без шунтирующего сопротивления. Для m=1,2,3,4 сопротивление шунта Rш принимает значения: 2R0; 1,5R0; 1,333R0; 1,25R0, где для безразмерной функции λ(m) при m=1,2,3,4 получают следующие конкретные значения функции λ(m): λ(1)=2; λ(2)=1,5; λ(3)=1,333; λ(4)=1,25.
Принадлежность измеряемого сопротивления динамическому поддиапазону с соответствующим индексом m определяют последовательно во времени и мажоритарно в пределах выбранного числа тактов сравнения зашунтированного измеряемого сопротивления Rхш с максимальным значением образцового компенсирующего сопротивления R0 по большинству совпадений знака результатов сравнения. Если мажоритарно, то есть по большинству совпадения знаков результатов сравнения Rхш с образцовым R0 сопротивлением определяют знак ошибки разбалансировки как положительный, что соответствует условию Rхш>R0, то в этом случае переходят к следующему по порядку динамическому поддиапазону. Если же аналогичным образом определяют мажоритарно знак как отрицательный (например, нуль-орган для определения знака разности в этом случае выдает сигнал, соответствующий нулю), то в этом случае оставляют прежний динамический поддиапазон.
Необходимо отметить для оценки преимуществ предлагаемого способа следующее. Если выполнять поразрядное уравновешивание измеряемого сопротивления в выбранном динамическом поддиапазоне независимо от его индекса, начиная со старшего разряда, путем изменения уравновешивающего образцового сопротивления в каждом разряде в соответствии с законом поразрядного уравновешивания, то есть изменяя уравновешивающее сопротивление Rоур в i-ом разряде по закону 2i·R для i=1,2,..., то измеряемое сопротивление Rx для динамического поддиапазона с индексом m>0 получается в соответствии с равенством

Это равенство определяет градуировочную характеристику, в соответствии с которой измеряемому сопротивлению Rx ставят в соответствие уравновешивающее образцовое сопротивление для любого значения индекса m. Данная нелинейная градуировочная характеристика преобразуется в линейную градуировочную характеристику только для индекса m=0. Действительно, при m=0 функция λ-1 (m)=0 и
Rx=R0уp=α·R0,
где  аi=1 или 0 и R=R0/(2N-1) R0·2-N (число двоичных разрядов в полученном в результате аналого-цифрового преобразования двоичном коде).
аi=1 или 0 и R=R0/(2N-1) R0·2-N (число двоичных разрядов в полученном в результате аналого-цифрового преобразования двоичном коде).
При использовании, например, для сравнения измеряемого сопротивления Rx и R0уp четырехплечего резистивного моста для индекса m>0 возникает неустранимая погрешность смещения, величина которой определяется величиной напряжения разбалансировки четырехплечего резистивного моста из-за прохождения тока по шунтирующему сопротивлению. Эта погрешность смещения определяется при β=α из равенства

где β=R0уp/R0; R0уp - значение уравновешивающего образцового сопротивления; δ=R01/R0;
α=Rx/R0; R01 - значения равных между собой образцовых сопротивлений, дополняющих уравновешивающие и измеряемые сопротивления до полного четырехплечего резистивного моста, которые выбирают из условия R01=3В/10-4А. Указанную погрешность смещения невозможно устранить мажоритарным способом уравновешивания с последующей коррекцией результата преобразования следящим преобразованием. Поскольку приведенная выше градуировочная характеристика нелинейно выражает измеряемое сопротивление Rx через его образцовый аналог R0уp для индексов m=1,2,..., то эта нелинейная зависимость приводит к возникновению не учтенной дополнительной методической составляющей погрешности измерения Rx.
Для устранения нелинейной составляющей погрешности, обусловленной дополнительным введением динамических поддиапазонов, путем шунтирования измеряемого сопротивления Rx в соответствии с предлагаемым способом выполняют следующие действия.
Первоначально определяют мажоритарно принадлежность измеряемого сопротивления тканей зуба динамическому поддиапазону с соответствующим индексом m.
В выбранном динамическом поддиапазоне последовательно во времени и мажоритарно по большинству совпадений результатов сравнения шунтированного измеряемого сопротивления Rхш с образцовым компенсирующим сопротивлением на каждом i-ом разряде уравновешивания шунтированного измеряемого сопротивления Rхш образцовым уравновешивающим (компенсирующим) сопротивлением (в дальнейшем просто образцовым сопротивлением) R0уpi определяют знак разности (ошибки) отклонения Rхш от образцового R0уpi сопротивления. По знаку разности между шунтированным измеряемым и образцовым сопротивлениями выполняют поразрядно и мажоритарно, начиная со старшего разряда и до заданного разряда двоичного кода Nc, компенсацию величины этой разности. Если мажоритарно, то есть по большинству совпадения знаков сравнения измеряемого сопротивления Rхш с образцовым R0уpi сопротивлением, на каждом такте уравновешивания определяют знак ошибки разбалансировки как положительный, то образцовое уравновешивающее сопротивление увеличивают по сравнению с установленным образцовым результирующим сопротивлением на предыдущих тактах мажоритарного уравновешивания. В этом случае двоичному коду в i-ом разряде приписывают единицу. Если же аналогичным образом определяют мажоритарно знак как отрицательный (например, нуль-орган для определения знака разности в этом случае выдает сигнал, соответствующий нулю), то установленное для i-го разряда значение образцового сопротивления отключают и на образцовом делителе оставляют результирующее образцовое сопротивление, установленное на предыдущих тактах мажоритарного уравновешивания, а в i-ом разряде двоичного кода устанавливают ноль.
Если индекс m>0, то в отличие от обычного линейного алгоритма поразрядного уравновешивания для m=0, поразрядную компенсацию разности между зашунтированным измеряемым Rхш и образцовым сопротивлением для i-го такта уравновешивания осуществляют нелинейно в соответствии с двоичным кодом βi, значение которого устанавливают априорно и эквивалентно сопротивлению
В результате чего разность между результирующим уравновешивающим и измеряемым сопротивлением Rx определяется, например, величиной разбалансировки четырехплечего резистивного моста, возникающей в его диагонали в виде разностного напряжения
где  ; δ=R01/R0; i=1,2,...Nc; α=Rx/R0; Nc - число старших разрядов в искомом двоичном коде, для которого осуществляется поразрядное уравновешивание; ai=1 или 0 в зависимости от мажоритарного результата сравнения зашунтированного измеряемого Rхш и образцового сопротивлений для i-го такта уравновешивания.
; δ=R01/R0; i=1,2,...Nc; α=Rx/R0; Nc - число старших разрядов в искомом двоичном коде, для которого осуществляется поразрядное уравновешивание; ai=1 или 0 в зависимости от мажоритарного результата сравнения зашунтированного измеряемого Rхш и образцового сопротивлений для i-го такта уравновешивания.
Использование, согласно предлагаемому способу, поразрядной компенсации разности между измеряемым и образцовым сопротивлением для i-го такта уравновешивания осуществляют нелинейно в соответствии с двоичным кодом, который устанавливает величину R0уpi Для оставшейся части младших разрядов Nм=N-Nc формирование кода осуществляют в следящем режиме, то есть по знаку ошибки, определяемому также мажоритарно, отклонения измеряемого от образцового сопротивления, полученного на предыдущих тактах уравновешивания i=1,2,...,Nc. При этом полученный на предыдущих Nc временных мажоритарных тактах Δtм двоичный код корректируют на единицу младшего разряда в большую или меньшую сторону в соответствии с предложенным способом. Временной мажоритарный такт Δtм равен сумме kΔt обычных элементарных тактов Δt сравнения, причем мажоритарный параметр k соответствует количеству тактов сравнения при заданном мажоритарном выборе результатов сравнения. Число мажоритарных Δtм тактов коррекции оставшихся младших разрядов соответствует величине Δtм·2Nм. Мажоритарные параметры для старших и младших разрядов могут быть разными, причем значения их должны быть нечетным числом и допускается для младших разрядов k=1, а для старших разрядов параметр k рекомендуется выбирать равным 3 или даже 5.
Анализ ошибки отклонения измеряемого от образцового уравновешивающего сопротивления, в частности, полученной в диагонали четырехплечего резистивного моста, в виде разности напряжения или тока показывает, что с увеличением индекса выбранного поддиапазона величина разбалансировки моста уменьшается обратно пропорционально квадрату индекса выбранного поддиапазона, следствием которого является понижение чувствительности соответствующей аппаратуры, реализующей способ. Это связано с тем, что часть тока от источника опорного напряжения ответвляется от электродов в цепь шунтирующего сопротивления. Для компенсации понижения чувствительности соответствующей аппаратуры в способе при переходе к диапазону измерения сопротивления с большим индексом увеличивают выходное напряжение в зависимости от значения индекса от источника опорного напряжения на величину, не превышающую предельно допустимой нормы в 8 В.
При диагностике биообъектов посредством постоянного зондирующего электрического сигнала по величине измеряемого сопротивления существенное влияние на погрешность измерения сопротивления и, следовательно, на надежность диагностики оказывает эффект поляризации, устранение которого возможно в данном случае только периодическим изменением полярности зондирующего постоянного электрического сигнала. Поэтому в предлагаемом способе при преобразовании синхронно с тактом аналого-цифрового преобразования изменяют полярность постоянного зондирующего электрического сигнала коммутацией пассивного и активного электродов.
Мажоритарный выбор для параметра k, равного 3, повышает достоверность определяемого разряда двоичного кода примерно в 1,5 раз, а выбор временного такта, равного 10 мс, способствует подавлению сетевой помехи примерно во столько же раз и, как показывает эксперимент, даже в большее число раз. Это связано с тем, что период сетевой помехи равен 20 мс, и временному такту в 10 мс соответствуют их отсчеты, равные по величине и противоположные по знаку. Сетевую помеху можно существенно до 100-120 дБ подавить схемотехническими способами, например, с помощью использования инструментального усилителя и фильтров, тем не менее данный вид помехи, суммируясь с собственными шумами радиоэлектронных компонентов из-за малого уровня полезного сигнала оказывает недопустимое для рассматриваемого случая влияние на погрешность аналого-цифрового преобразования (цифрового измерения сопротивления). Особенно опасно влияние суммарной сетевой и случайной помехи на определение старших разрядов двоичного кода, приводящее к существенной и неустранимой обычными методами поразрядного уравновешивания погрешности (в том числе погрешности смещения) цифрового измерения сопротивления и, следовательно, значительному снижению надежности и воспроизводимости результатов медицинской диагностики состояния тканей зубов. Поэтому, предложенная в способе нелинейная коррекция результатов аналого-цифрового преобразования для выбранного числа младших разрядов в следящем режиме позволяет дополнительно скорректировать как систематическую составляющую погрешности преобразования, так и подавить помеху, образующую случайную составляющую погрешности. Причем, эффективность подавления случайной составляющей погрешности достаточно высока.
На фиг.1 представлена структурная схема устройства для измерения сопротивления твердых тканей зубов, реализующая предложенный способ. На фиг.2 представлены результаты моделирования и пример программы части алгоритма с нелинейным изменением веса уравновешивающего сопротивления в динамическом диапазоне с индексом m=2, а также график преобразуемых в цифровой двоичный код значений случайно изменяющегося при моделировании в этом динамическом поддиапазоне зашунтированного входного сопротивления.
Схема устройства для диагностики состояния тканей зубов состоит из элементов и блоков, имеющих следующие обозначения: 1 - источник опорного напряжения; 2 - регулятор опорного напряжения; 3 - четырехплечий резистивный мост; 4 - образцовые, равные между собой резисторы R01, включенные в симметричные плечи четырехплечего резистивного моста; 5 и 6 - активный и пассивный электроды соответственно; 7 - ключи коммутации электродов; 8 - шунтирующий делитель напряжения, состоящий из 81,...,8m последовательно соединенных ключей коммутации делителя напряжения и шунтирующих резисторов: 2R0; 1,5R0;... (1+1/m)R0; 9 - кодоуправляемый делитель напряжения (в дальнейшем просто: делитель напряжения), состоящий из 90,...,9N-1 последовательно соединенных ключей и резисторов с номиналами, изменяющимися кратно двум R, то есть от 2°R до 2N-1 R, сумма которых равна R0; 10 - инструментальный усилитель; 11 - фильтр нижних частот; 12 - нуль-орган; 13 - микропроцессорная система, состоящая из 14 - микропроцессора; 15 - клавиатуры управления; 16 - жидкокристаллического дисплея (ЖКД); 17 - запоминающего устройства с последовательной записью и считыванием; 18 - схема интерфейса RS-232.
Устройство для измерения сопротивления твердых тканей зубов биообъектов, реализующее предложенный способ содержит: источник 1 опорного напряжения; регулятор 2 опорного напряжения; четырехплечий 3 резистивный мост; образцовые 4, равные между собой резисторы R01, включенные в симметричные плечи четырехплечего 3 резистивного моста; активный 5 и пассивный 6 электроды, подключенные к первому и второму информационным входам ключей 7 коммутации электродов соответственно; шунтирующий 8 делитель напряжения (в дальнейшем просто: шунтирующий делитель напряжения), состоящий из 81,...,8m последовательно соединенных ключей коммутации делителя напряжения и шунтирующих резисторов: 2R0; 1,5R0;... (1+1/m)R0; делитель 9 напряжения, состоящий из 90,...,9N-1 последовательно соединенных ключей и уравновешивающих образцовых резисторов с номиналами, изменяющимися кратно двум R, то есть от 2° R до 2N-1 R, сумма которых равна R0; инструментальный усилитель 10; фильтр нижних частот 11; нуль-орган 12; микропроцессорную 13 систему, состоящую из микропроцессора 14, клавиатуры 15 управления, ЖКД 16, запоминающего 17 устройства с последовательной записью и считыванием; схемы 18 интерфейса RS-232. При этом источник 1 опорного напряжения через регулятор 2 опорного напряжения соединен с первой диагональю четырехплечего 3 резистивного моста, включающего в первые два симметричных плеча образцовые 4, равные между собой резисторы R01, а во вторые два симметричных плеча - активный 5 и пассивный 6 электроды, подключенные к плечу четырехплечего 3 резистивного моста через ключи 7 коммутации электродов, выходы которых, в этом же плече, параллельно подключены к шунтирующему 8 делителю напряжения, состоящему из 81,...,8m последовательно соединенных ключей коммутации делителя напряжения и шунтирующих резисторов: 2R0; 1,5R0;... (1+1/m)R0. Вторая диагональ четырехплечего 3 резистивного моста подключена к первому и второму входу инструментального 10 усилителя соответственно, выход которого через фильтр 11 нижних частот подключен к первому входу нуль-органа 12, второй вход которого соединен с общей шиной. Информационный выход нуль-органа 12 соединен с одноименным входом микропроцессорной 13 системы. Управляющие входы регулятора 2 опорного напряжения, ключей 7 коммутации электродов, шунтирующего 8 делителя напряжения и делителя 9 напряжения подключены соответственно к первой, второй, третьей и четвертой группам цифровых выходов микропроцессорной 13 системы, а управляющий вход нуль-органа 12 соединен с пятым управляющим цифровым выходом микропроцессорной 13 системы. Соответствующие входы и выходы клавиатуры 15 управления, ЖКД 16, запоминающего 17 устройства с последовательной записью и считыванием, схемы 18 RS интерфейса стандартно подключены к входам и выходам микропроцессора 14. Другие цифровые выходы микропроцессора 14 и информационный вход подключены к первой, второй, третьей и четвертой группам цифровых выходов микропроцессорной 13 системы, а также к пятому управляющему цифровому выходу этой же системы и к ее информационному входу соответственно.
Устройство для измерения сопротивления твердых тканей зубов биообъектов работает следующим образом.
Предварительно, в соответствии с предложенным способом, в энергонезависимое запоминающее устройство, встроенное в микропроцессор 14 (например, выполненный на большой интегральной схеме типа АТ89 СИ 51Е D2-3CU31IM), записывается управляющая программа. Управляющая программа реализует приведенный ниже по тексту алгоритм, в соответствии с которым в устройстве для диагностики состояния тканей зубов биообъектов выполняются в указанной ниже последовательности следующие действия и установки.
При включении устройства, то есть при подключении питания, на цифровых выходах первой, второй, третьей и четвертой групп, а также на пятом управляющих цифровых выходах микропроцессорной 13 системы в соответствии с управляющей программой устанавливаются следующие исходные управляющие двоичные коды:
- на первой группе цифровых управляющих выходов микропроцессорной 13 системы устанавливается двоичный код, в соответствии с которым на выходе регулятора 2 опорного напряжения устанавливается минимально допустимое напряжение, например, 3 В;
- на второй группе цифровых управляющих выходов микропроцессорной 13 системы устанавливается двоичный код, в соответствии с которым ключи 7 коммутации электродов устанавливаются, например, в состояние, при котором к выходу регулятора 2 опорного напряжения подключается активный 5 электрод, а к входу образцового резистора 4 R01 - пассивный 6 электрод;
- на третьей группе цифровых управляющих выходов микропроцессорной 13 системы устанавливается двоичный код, в соответствии с которым в шунтирующем 8 делителе напряжения, состоящем из 81,...,8m последовательно соединенных ключей коммутации делителя напряжения и шунтирующих резисторов, все последовательно соединенные ключи коммутации делителя напряжения находятся в разомкнутом состоянии, отключающие последовательно соединенные резисторы с номиналами 2R0, 1,5R0,..., (1+1/m)R0 от активного 5 и пассивного 6 электродов;
- на четвертой группе цифровых управляющих выходов микропроцессорной 13 системы устанавливается двоичный код, в соответствии с которым в делителе 9 напряжения, все 90,...,9N-1 последовательно соединенные ключи подключают уравновешивающие образцовые сопротивления с номиналами от 20R до 2N-1 R к выходу регулятора 2 опорного напряжения и к диагонали моста с одной стороны, и к образцовому 4 резистору R01, с другой стороны;
- с пятого управляющего цифрового выхода микропроцессорной 13 системы на нуль-орган 12 поступает постоянный запирающий сигнал.
Перечисленные исходные состояния управляющих двоичных кодов в соответствии с предлагаемым способом устанавливают режим работы устройства, в соответствии с которым определяется принадлежность измеряемого сопротивления Rx к искомому динамическому поддиапазону. Исходные состояния записаны в виде соответствующих значений параметров программы в запоминающем устройстве микропроцессора 14, входящего в состав микропроцессорной 13 системы.
Перед проведением измерения сопротивления тканей зубов пассивный электрод 6, в качестве которого рекомендуется использовать смотровое зеркальце, помещают в полость рта. Активный электрод 5, выполненный, например, в виде разового шприца, заполненного кальцием хлорида с затупленной иглой помещают в исследуемую локальную, например, в фиссурную область зуба. В результате контакта между электродом и исследуемой областью зуба замыкается рабочее плечо четырехплечего 3 резистивного моста. Сигнал, определяющий разбалансировку четырехплечего 3 резистивного моста из-за не совпадений измеряемого Rx и первоначально установленного в делителе 9 напряжения результирующего уравновешивающего образцового сопротивления, со второй диагонали четырехплечего 3 резистивного моста поступает на первый и второй входы инструментального усилителя 10. Выходной разностный сигнал через фильтр нижних частот 11 поступает на информационный вход нуль-органа 12. Для проведения измерения активного сопротивления исследуемой локальной области зуба необходимо подать стартовый сигнал или сигнал «пуск» на микропроцессор 14 нажатием кнопки «пуск». Кнопка «пуск» не показана на фиг.1, так как она является составной частью клавиатуры 15 управления, ее техническая реализация не влияет на работу устройства в целом. Однако для удобства эксплуатации устройства кнопка «пуск» может быть продублирована на выносном пульте в виде специальной «клипсы», подсоединенной к разовому шприцу, образующему электрод 5.
По сигналу «пуск» устройство в соответствии с управляющей программой, записанной априорно в запоминающее устройство микропроцессора 14, переходит в режим измерения. В режиме измерения через пятый управляющий цифровой выход микропроцессорной 13 системы с соответствующего выхода микропроцессора 14 поступает импульсный стробирующий сигнал с периодом, равным 10 мс, и скважностью не менее 1000 на управляющий вход нуль-органа 12. По этому стробирующему импульсному сигналу с информационного выхода нуль-органа 12 считывается через каждые 10 мс информационный сигнал, соответствующий «единице» или «нулю». Информационный сигнал «единица» соответствует событию, при котором измеряемое сопротивление Rx превышает первоначально установленное максимальное образцовое уравновешивающее сопротивление на 9 делителе напряжения в симметричном плече четырехплечего 3 резистивного моста, а «ноль» - противоположному событию. Для повышения достоверности принятие решения по выходному информационному сигналу нуль-органа 12 о состоянии управляющего кода делителя 9 напряжения осуществляется мажоритарно. Это значит, что выходной информационный сигнал нуль-органа 12 считается достоверным по результатам анализа многотактного сравнения сигналов, снимаемых с диагонали четырехплечего 3 резистивного моста, поступающих на первый и второй вход нуль-органа 12 в зависимости от априорно установленного мажоритарного базиса. Мажоритарный базис определяет выбор состояния информационного сигнала с выхода нуль-органа 12 из трех по два или из пяти по три, что соответствует принятию решения в течение мажоритарного такта о достоверности выходного информационного сигнала нуль-органа 12 по двум или по трем совпадающим событиям из возможных трех или пяти альтернативных, появляющихся на выходе нуль-органа 12 в виде сигналов, соответствующих единице или нулю. Мажоритарный временной такт (в дальнейшем просто мажоритарный такт) равен суммарной длительности периодов следования стробирующих импульсов, число которых соответствует мажоритарному базису. При этом после каждого мажоритарного такта по цифровому сигналу управления, поступающему с первой группы цифровых выходов микропроцессорной 13 системы на управляющие входы ключей 7 коммутации электродов, меняется направление тока зондирующего электрического сигнала за счет последовательного переключения контактов ключей 7 коммутации электродов. Причем время переключения контактов ключей 7 коммутации электродов, так же как время установления напряжения на выходе регулятора 2 опорного напряжения, устанавливается значительно меньше 10 мс, поэтому переходные процессы, связанные с переключением контактов ключей 7 коммутации электродов и с изменением напряжения на выходе регулятора 2 опорного напряжения, не оказывают влияния на работу устройства в целом.
После первого мажоритарного такта возможны два альтернативных события. Предположим, что первое событие соответствует тому, что Rx превышает начальное максимальное значение образцового уравновешивающего сопротивления, установленного в симметричном плече четырехплечего 3 резистивного моста на 9 делителе напряжения. В этом случае при переходе к следующему мажоритарному такту установленные первоначально на 9 делителе напряжения образцовые уравновешивающие сопротивления остаются неизменными. По коду управления, поступающему с первой и третьей групп цифровых выходов микропроцессорной 13 системы, увеличивается опорное напряжение на выходе регулятора 2 опорного напряжения, превышающее 3 В, например, на k В, то есть установится напряжение, равное (3+k) В, и подключается параллельно активному 5 и пассивному 6 электродам шунтирующее сопротивление 2R0. Подключение шунтирующего сопротивления 2R0 определяет динамический поддиапазон с индексом m=1. При втором мажоритарном такте после подключения шунтирующего сопротивления 2R0 вновь мажоритарно анализируется предварительно усиленный на инструментальном 10 усилителе и пропущенный через фильтр 11 нижних частот информационный выходной сигнал нуль-органа 12. Если принимается решение о том, что измеряемое сопротивление Rx превышает динамический поддиапазон со следующим по порядку значением индекса, то выше описанный процесс определения принадлежности измеряемого сопротивления Rx к динамическому поддиапазону с последующим значением индекса продолжается вплоть до последнего максимального значения индекса. Если же устанавливается, что измеряемое сопротивление Rx превышает динамический поддиапазон и с максимальным индексом, то процесс измерения прекращается и на ЖКД 16 появляется соответствующее сообщение.
Все промежуточные значения двоичных кодов формируются и запоминаются в запоминающем устройстве микропроцессора 14 в соответствии с управляющей программой, реализующей вышеописанный первый этап комбинированного алгоритма аналого-цифрового преобразования.
Если же для динамического поддиапазона с нулевым индексом появляется информационный выходной сигнал нуль-органа 12, соответствующий такому альтернативному событию, когда Rx мажоритарно не превышает максимальное Ro образцовое уравновешивающее сопротивление, установленное в симметричном плече четырехплечего 3 резистивного моста на делителе 9 напряжения, то режим работы устройства изменяется следующим образом. На делителе 9 напряжения в соответствии с управляющим кодом, поступающим с четвертой группы цифровых выходов микропроцессорной 13 системы, все первоначально установленные образцовые уравновешивающие сопротивления от 20 R до 2N-2 R отключается, то есть шунтируется соответствующими короткозамкнутыми контактами ключей от 90 до 9N-2, кроме сопротивления старшего разряда 2N-1 R.
Как и прежде, для повышения достоверности принятие решения по выходному информационному сигналу нуль-органа 12 о дальнейшем изменении кода управления делителем 9 напряжения осуществляется мажоритарно и после первого мажоритарного такта возможны следующие два альтернативных события. Первое событие соответствует тому, что Rx превышает начальное образцовое уравновешивающее сопротивление 2N-1 R, установленное в симметричном плече четырехплечего 3 резистивного моста на делителе 9 напряжения. В этом случае при переходе к следующему мажоритарному такту это сопротивление остается неизменным до конца процесса преобразования. Альтернативное событие соответствует тому, что Rx не превышает начальное значение образцового уравновешивающего сопротивления 2N-1 R, установленного в симметричном плече четырехплечего 2 резистивного моста на делителе 9 напряжения. При осуществлении альтернативного событи, сопротивление 2N-1 R отключается, то есть шунтируется соответствующим короткозамкнутым ключом 9 делителя напряжения. Далее, независимо от результатов принятия решения на первом мажоритарном такте при переходе ко второму мажоритарному такту в соответствии с управляющим кодом, устанавливаемом на 4-й группе цифровых выходов микропроцессорной 13 системы, подключается образцовое уравновешивающее сопротивление 2N-2 R за счет переключения соответствующих контактов ключа 9N-2. При втором мажоритарном такте решение о сохранении или отключении резистора 2N-2 R осуществляется аналогично вышеописанному способу. После каждого мажоритарного такта на второй группе цифровых управляющих выходов микропроцессорной 13 системы двоичный код синхронно с началом следующего мажоритарного такта инвертируется, и, в соответствии с этим, контакты ключей 7 коммутации электродов устанавливаются в противоположное состояние. Периодическая инверсия управляющего кода ключей 7 коммутации электродов приводит к тому, что к выходу регулятора 2 опорного напряжения подключается попеременно то активный 5, то пассивный 6 электроды, а к входу образцового резистора 4 R01 - наоборот, то пассивный 6, то активный 5 электроды. Благодаря этому изменяется направление тока, протекающего через активный 5 и пассивный 6 электроды, и практически устраняется влияние эффекта поляризации на результаты цифрового измерения искомого сопротивления Rx.
После выполнения второго мажоритарного такта возможны четыре комбинации состояния ключей и, следовательно, значений сопротивлений на делителе 9 напряжения:
- все ключи остались в замкнутом состоянии, что соответствует нулевому начальному коду;
- ключ старшего разряда разомкнут, а остальные все ключи остались в замкнутом состоянии, что соответствует коду, у которого, кроме старшего разряда, равного единице, все остальные разряды остаются в нуле;
- ключ, следующий за старшим разрядом, разомкнут, а остальные все ключи остались в замкнутом состоянии, что соответствует коду, у которого, кроме следующего за старшим разрядом, равным единице, все остальные разряды остаются в нуле;
- ключ старшего и следующего за старшим разрядом разомкнут, а остальные все ключи остались в замкнутом состоянии, что соответствует коду, у которого, кроме двух старших разрядов, равных единице, все остальные разряды остаются в нуле.
В результате выполнения перечисленных выше действий при определении остальных разрядов кода ai от i=1 до Nc включительно формируется управляющий двоичный код на выходе четвертой группы цифровых выходов микропроцессорной 13 системы. Этому коду соответствует такая комбинация состояний ключей 90,...,9Nc-1 в 9 делителе напряжения, которая определяет результат преобразования измеряемого сопротивления Rx в двоичный код вида
где аi=1, если ключ 9i в делителе 9 напряжения находится в разомкнутом состоянии и аi=0 для противоположного случая, при j=1,2,...,Nc, в динамическом поддиапазоне с индексом m=0. В динамическом диапазоне с индексом 0 сопротивление Rx измеряется в пределах от нуля до максимального значения, равного R(2Nc-1). Все промежуточные значения двоичных кодов и полученный на Nc такте преобразования код βNc формируются и запоминаются в запоминающем устройстве микропроцессора 14 по управляющей программе, реализующей вышеописанный этап комбинированного алгоритма аналого-цифрового преобразования.
В соответствии с предложенным способом для снижения погрешности на втором этапе комбинированного алгоритма аналого-цифрового преобразования, начиная с Nc+1 разряда меняется режим уравновешивания измеряемого сопротивления. Признаком для изменения режима уравновешивания является только номер разряда Nc. При этом переход на новый режим (этап) преобразования осуществляется по условному переходу, когда число мажоритарных тактов на программном счетчике микропроцессора 14 достигнет значения Nc. В соответствии с новым режимом уравновешивания по сигналу программного счетчика микропроцессора 14 выполняются следующие действия:
1) все ключи в делителе 9 первоначально остаются в состоянии, которое было достигнуто до выполнения Nc мажоритарного такта уравновешивания включительно;
2) на Nc+1-ом мажоритарном такте уравновешивания к полученному на предыдущих Nc мажоритарных тактах двоичному коду βNc, который хранится в памяти микропроцессора 14, по выходному информационному сигналу нуль-органа 12, определяемому мажоритарно, добавляется или вычитается единица;
3) в соответствии с полученным после каждого мажоритарного такта результирующим двоичным кодом, поступающим с 4-ой группы управляющих цифровых выходов микропроцессорной системы 13, изменяется состояние ключей 90,...,9N-1 в делителе 9 напряжения;
4) на следующем Nc+2-ом мажоритарном такте уравновешивания к полученному на предыдущем Nc+1 мажоритарном такте двоичному коду по выходному информационному сигналу нуль-органа 12 снова добавляется или вычитается единица и выполняются условия пункта (3).
Выполняя перечисленные выше действия при определении остальных разрядов кода 2N-Nc раз, получается в результате такая комбинация состояний ключей 90,...,9N-1 в делителе 9 напряжения, которая соответствует результату преобразования измеряемого сопротивления Rx в двоичный код в динамическом поддиапазоне от нуля до максимального значения, равного R(2N-1)=R0. Все промежуточные значения двоичных кодов, так же как и при преобразовании в первые Nc мажоритарных тактов, формируются и запоминаются в запоминающем устройстве микропроцессора 14 в соответствии с программой, реализующей второй этап вышеописанного комбинированного алгоритма аналого-цифрового преобразования.
Предположим, что измеряемое сопротивление Rx окажется в поддиапазоне с индексом m>0, в соответствии с которым выполняются следующие действия:
- на первой группе цифровых управляющих выходов устанавливается двоичный код, в соответствии с которым на выходе регулятора 2 опорного напряжения устанавливается напряжение, превышающее 3 В, например, на k В, то есть установится напряжение, равное (3+k) В, где, например, k=1,2,...,m;
- на третьей группе цифровых управляющих выходов устанавливается двоичный код, по которому в шунтирующем делителе 8 напряжения, состоящем из 81,...,8m последовательно соединенных ключей коммутации делителя напряжения и шунтирующих резисторов, все последовательно соединенные ключи коммутации делителя напряжения установятся в разомкнутом состоянии, кроме ключа 8k, в результате чего подключается последовательно соединенный с ключом резистор с номиналом λ(m)R0=(1+m) R0/m, (m=1, 2,...) в плечо четырехплечего 3 резистивного моста параллельно активному 5 и пассивному 6 электродам, а остальные последовательно соединенные с соответствующими ключами резисторы остаются отключенными;
- устанавливается нулевой начальный код управления, поступающий на делитель 9 напряжения, с выхода четвертой группы цифровых выходов микропроцессорной 13 системы;
- по результату сравнения сопротивления Rхш с нулевым значением устанавливается код управления, поступающий на делитель 9 напряжения с выхода четвертой группы цифровых выходов микропроцессорной 13 системы, соответствующий величине сопротивления, определяемого по формуле
для определения R0уpi(m) из необходимости измерения сопротивления Rхш в динамическом поддиапазоне с индексом m>0.
Далее в устройстве повторяются действия в соответствии с приведенным описанием работы устройства в динамическом поддиапазоне с индексом 0, кроме определенных изменений, связанных с видом управляющего кода, который поступает на делитель 9 напряжения с выхода четвертой группы цифровых выходов микропроцессорной 13 системы. Изменение нелинейной функции, описывающей изменение управляющего кода поступающего на входы делителя 9 напряжения и, следовательно, изменение уравновешивающего образцового сопротивления, приводит к качественному изменению, согласно предложенному способу, принципа уравновешивания измеряемого сопротивления Rx по сравнению с известными способами и устройствами аналого-цифрового преобразования.
Для того чтобы алгоритмически описать в целом работу устройства, реализующего в соответствии с предложенным способом комбинированный алгоритм аналого-цифрового преобразования измеряемого сопротивления Rx (цифровое измерение Rx), опишем его работу в виде нижеследующей связанной системы алгоритмов. В соответствии с представленной системой алгоритмов реализуется управляющая программа, записанная априорно в энергонезависимое запоминающее устройство микропроцессора 14, входящего в состав микропроцессорной 13 системы. Микропроцессорная 13 система выполняет в устройстве функцию многофункционального управляющего блока, включая формирование и реализацию: сигналов управления, поступающих с клавиатуры 15 управления; функции записи и считывания как служебной информации, так и результатов измерения с запоминающего 17 устройства с последовательной записью и считыванием; дополнительной функции индикации результатов измерения на ЖКД 16; передачи данных посредством схемы 18 интерфейса RS-232 на ПЭВМ верхнего уровня.
Первый этап работы устройства представим в виде следующего алгоритма, описывающего работу устройства на предварительном этапе определения индекса динамического поддиапазона, которому принадлежит измеряемое сопротивление Rx:
где Rшj[(j)Δtм] - значение шунтирующего сопротивление для m-го динамического поддиапазона при j=m; Δtм - временной мажоритарный интервал, кратный 10 мс; R01 - заданное образцовое сопротивление, включенное в симметричные плечи четырехплечего 3 резистивного моста; R0урмакс (jΔtм) - сопротивление, определяющее верхнюю границу динамического поддиапазона для j=m;
 - напряжение, характеризующее чувствительность четырехплечего 3 резистивного моста при m=1,2,...;
- напряжение, характеризующее чувствительность четырехплечего 3 резистивного моста при m=1,2,...;
R0урмакс(jΔtм)=R0; Um=U0+ΔU·m - изменение исходного напряжения U0 на выходе регулятора 2 опорного напряжения, в зависимости от индекса динамического поддиапазона при m=1,2,...; R01 - образцовое 4 сопротивление;
 - усиленный сигнал разбалансировки моста на выходе инструментального усилителя 10 с коэффициентом усиления Ку;
- усиленный сигнал разбалансировки моста на выходе инструментального усилителя 10 с коэффициентом усиления Ку;
 - сигнал разбалансировки моста, после усиления инструментальным усилителем 10 и фильтрации, на выходе фильтра 11 нижних частот с функцией фильтрации ψ[...];
- сигнал разбалансировки моста, после усиления инструментальным усилителем 10 и фильтрации, на выходе фильтра 11 нижних частот с функцией фильтрации ψ[...];

- функция, описывающая сигнал на выходе нуль-органа 12;
 - мажоритарная функция принимающая значение 1, если мажоритарно выполняется условие Rхшm-R0урмакс(jΔtм)≥0 и ноль - в противоположном случае, реализуемая программно в микропроцессоре 14.
- мажоритарная функция принимающая значение 1, если мажоритарно выполняется условие Rхшm-R0урмакс(jΔtм)≥0 и ноль - в противоположном случае, реализуемая программно в микропроцессоре 14.
Как видно из предварительного этапа комбинированного алгоритма, принадлежность измеряемого сопротивления Rx соответствующему динамическому поддиапазону определяется по значению мажоритарной функции, равной 1, которая обеспечивает функцию перехода от динамического поддиапазона с меньшим индексом к динамическому поддиапазону с большим индексом.
Если установлено, что Rx принадлежит динамическому поддиапазону с индексом 0, то программой, записанной в микропроцессоре 14 и управляющей последовательностью выходных управляющих цифровых сигналов микропроцессорной 13 системы, поступающих на управляющие входы выше описанных элементов устройства (регулятор 2 опорного напряжения, ключи 7 коммутации электродов, шунтирующий 8 делитель напряжения, делитель 9 напряжения и нуль-орган 12), реализуется следующий второй и третий этапы комбинированного алгоритма аналого-цифрового преобразования.
Для второго и третьего этапов при m=0 соответствующая запись комбинированного алгоритма представляется в виде
где  - напряжение, характеризующее чувствительность четырехплечего 3 резистивного моста при m=0.
- напряжение, характеризующее чувствительность четырехплечего 3 резистивного моста при m=0.
На этих этапах в отличие от предварительного этапа работы устройства осуществляется преобразование измеряемого сопротивления Rx в цифровой двоичный код комбинированным алгоритмом аналого-цифрового преобразования. На первом этапе выполняется поразрядное уравновешивание для старших разрядов и на втором этапе - следящее уравновешивание для младших разрядов с мажоритарным принятием решения о значении каждого разряда в процессе преобразования. Для динамического поддиапазона с индексом 0 шунтирующие сопротивления в шунтирующем 8 делителе напряжения отключаются.
Если установлено, что Rx принадлежит динамическому поддиапазону с индексом, превышающим нулевое значение, то в соответствии с управляющей программой реализуется следующий модифицированный комбинированный алгоритм аналого-цифрового преобразования.
Соответствующий модифицированный комбинированный алгоритм, определяющий работу управляющей программы, записанной в памяти микропроцессора 14, которая управляет последовательностью выходных управляющих цифровых сигналов микропроцессорной 13 системы, имеет вид

где  - напряжение, характеризующее чувствительность четырехплечего 3 резистивного моста для i-го разряда уравновешивающего двоичного кода; Um=U0+ΔU·m - изменение исходного напряжения U0 на выходе регулятора 2 опорного напряжения в зависимости от индекса динамического поддиапазона; R01 - образцовое 4 сопротивление; Ку и ψ[...] - коэффициент усиления Ку инструментального усилителя 10 и передаточная функция фильтра 11 нижних частот;
- напряжение, характеризующее чувствительность четырехплечего 3 резистивного моста для i-го разряда уравновешивающего двоичного кода; Um=U0+ΔU·m - изменение исходного напряжения U0 на выходе регулятора 2 опорного напряжения в зависимости от индекса динамического поддиапазона; R01 - образцовое 4 сопротивление; Ку и ψ[...] - коэффициент усиления Ку инструментального усилителя 10 и передаточная функция фильтра 11 нижних частот;
 - изменение уравновешивающего сопротивления для динамического поддиапазона с индексом m>0 при изменении номера разряда i от 1 до Nc в зависимости от изменения двоичного кода
- изменение уравновешивающего сопротивления для динамического поддиапазона с индексом m>0 при изменении номера разряда i от 1 до Nc в зависимости от изменения двоичного кода 
j=1+m,...,m+Nc - номер мажоритарного такта уравновешивания;
 - изменение уравновешивающего сопротивления для динамического поддиапазона с индексом m>0 при изменении номера разряда i от Nc+1 до N в зависимости от изменения двоичного кода
- изменение уравновешивающего сопротивления для динамического поддиапазона с индексом m>0 при изменении номера разряда i от Nc+1 до N в зависимости от изменения двоичного кода 
j=m+1+Nc,...,m+Nc+2N-Nc - номер мажоритарного такта уравновешивания;
 - значение результирующего измеряемого сопротивления зашунтированного сопротивлением λ(m)·R0;
- значение результирующего измеряемого сопротивления зашунтированного сопротивлением λ(m)·R0;
 - мажоритарная функция, принимающая значение 1, если мажоритарно выполняется условие
- мажоритарная функция, принимающая значение 1, если мажоритарно выполняется условие  и ноль - в противоположном случае;
и ноль - в противоположном случае;
 - мажоритарная функция, принимающая значение 1, если мажоритарно выполняется условие
- мажоритарная функция, принимающая значение 1, если мажоритарно выполняется условие  и -1 - в противоположном случае.
и -1 - в противоположном случае.
Как следует из представленного последнего этапа модифицированного комбинированного алгоритма, в отличие от обычного алгоритма поразрядного уравновешивания и следящего алгоритма преобразования, в данном алгоритме коррекция кода осуществляется в соответствии с предложенным способом по знаку ошибки рассогласования нелинейно преобразованной измеряемой и уравновешивающей величины. Реализация данного алгоритма осуществляется на основе микропроцессора 14. При реализации рассмотренного алгоритма аналого-цифрового преобразования изменение уравновешивающего сопротивления для динамического поддиапазона с индексом m>0 осуществляется по двоичному коду управления, который поступает с четвертой группы цифровых выходов микропроцессорной системы 13 на управляющие входы делителя 9 напряжения. Данный двоичный код формируется в соответствии с управляющей программой, реализующий представленный алгоритм в микропроцессоре 14. Значение управляющего кода, поступающего на управляющие входы делителя 9 напряжения, отличного от двоичного кода, получаемого обычным поразрядным уравновешиванием, либо вычисляется в соответствии с формулой

в текущем такте уравновешивания, либо вычисляется априорно и записывается в энергонезависимое запоминающее устройство 17 с последовательной записью и считыванием. В том и другом случае реализуется функция преобразования код - код. Современные энергонезависимое запоминающие устройства с последовательной записью и считыванием, например, фирмы «Atmel» имеют емкость в 4 Мбайт и позволяют записывать данные по 18 и более разрядному двоичному коду и тем самым выполнять функцию преобразователя код - код.
Таким образом, предлагаемое изобретение, благодаря реализации комбинированного алгоритма аналого-цифрового преобразования с мажоритарным установлением значений двоичного разряда и реализации функции нелинейного уравновешивания измеряемого сопротивления, существенно расширяет динамический диапазон цифрового измерения сопротивления биообъектов при сохранении заданной относительной погрешности преобразования.
Действительно, в результате цифрового измерения искомое сопротивление представляется в идее
где m - индекс выбранного динамического поддиапазона, а двоичный код  - есть результат преобразования в m-ом выбранном динамическом поддиапазоне. Полная погрешность цифрового измерения, независимо от m-ого выбранного динамическом поддиапазона, складывается из двух составляющих. Первая составляющая - это погрешность выбора динамического поддиапазона и вторая составляющая - это погрешность аналого-цифрового преобразования в выбранном динамическом поддиапазоне. Причем в соответствии с предложенным способом благодаря мажоритарному анализу результатов сравнения измеряемого и уравновешивающего сопротивления, нелинейному комбинированному аналого-цифровому преобразованию входного сопротивления в динамическом поддиапазона с индексом m>0, а также использованию для усиления ошибки разбалансировки четырехплечего 3 резистивного моста инструментального 10 усилителя, фильтра 11 нижних частот и согласованному увеличению источника питания четырехплечего 3 резистивного моста за счет введения регулятора 2 опорного напряжения, увеличение первой и второй составляющей погрешности за счет снижения чувствительности моста при увеличении измеряемого сопротивления сводится к минимуму. Слабая зависимость результирующей погрешности цифрового измерения искомого сопротивления от выбранного динамического поддиапазона существенно расширяет общий динамический диапазон измерения искомого сопротивления диагностируемых биообъектов и повышает надежность их диагностики. Синхронное с аналого-цифровым преобразованием изменение полярности зондирующего сигнала, приложенного к активному и пассивному электродам, устраняет погрешность поляризации.
- есть результат преобразования в m-ом выбранном динамическом поддиапазоне. Полная погрешность цифрового измерения, независимо от m-ого выбранного динамическом поддиапазона, складывается из двух составляющих. Первая составляющая - это погрешность выбора динамического поддиапазона и вторая составляющая - это погрешность аналого-цифрового преобразования в выбранном динамическом поддиапазоне. Причем в соответствии с предложенным способом благодаря мажоритарному анализу результатов сравнения измеряемого и уравновешивающего сопротивления, нелинейному комбинированному аналого-цифровому преобразованию входного сопротивления в динамическом поддиапазона с индексом m>0, а также использованию для усиления ошибки разбалансировки четырехплечего 3 резистивного моста инструментального 10 усилителя, фильтра 11 нижних частот и согласованному увеличению источника питания четырехплечего 3 резистивного моста за счет введения регулятора 2 опорного напряжения, увеличение первой и второй составляющей погрешности за счет снижения чувствительности моста при увеличении измеряемого сопротивления сводится к минимуму. Слабая зависимость результирующей погрешности цифрового измерения искомого сопротивления от выбранного динамического поддиапазона существенно расширяет общий динамический диапазон измерения искомого сопротивления диагностируемых биообъектов и повышает надежность их диагностики. Синхронное с аналого-цифровым преобразованием изменение полярности зондирующего сигнала, приложенного к активному и пассивному электродам, устраняет погрешность поляризации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ И ПОДГОТОВКИ ВЕЛИЧИНЫ СОПРОТИВЛЕНИЯ РЕЗИСТОРОВ | 2003 |
|
RU2249222C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЙ И ПРИРАЩЕНИЯ СОПРОТИВЛЕНИЯ | 2003 |
|
RU2249223C1 |
| Устройство для преобразования сопротивления в код | 1989 |
|
SU1751849A1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЕМКОСТИ И СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2009 |
|
RU2391677C1 |
| СПОСОБ КАРАСЕВА А.А. ИЗМЕРЕНИЯ ЭЛЕКТРОПРОВОДИМОСТИ ТКАНИ БИОЛОГИЧЕСКОГО ОБЪЕКТА | 1997 |
|
RU2145186C1 |
| Автоматический цифровой мост переменного тока | 1981 |
|
SU983555A1 |
| Автоматический цифровой мост переменного тока | 1982 |
|
SU1081555A1 |
| Цифровой омметр | 1976 |
|
SU789896A1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЕМКОСТИ И СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2013 |
|
RU2546713C1 |
| Четырехплечий квадратурный мост для сравнения активных сопротивлений резисторов с реактивными сопротивлениями конденсаторов | 1983 |
|
SU1108365A1 |

Группа изобретений относится к стоматологии и предназначена для измерения сопротивления твердых тканей зубов. Способ включает в себя несколько этапов. На предварительном этапе полный динамический диапазон изменения сопротивления разбивают на конечное индексируемое (пронумерованное) число динамических поддиапазонов по допустимой величине приведенной погрешности аналого-цифрового преобразования измеряемого сопротивления. В пределах найденного и установленного поддиапазона осуществляют аналого-цифровое преобразование измеряемого сопротивления тканей в два этапа. На первом этапе для фиксированного числа разрядов аналого-цифровое преобразование измеряемого сопротивления последовательным уравновешиванием, начиная со старшего разряда, осуществляют поразрядно, приписывая каждому разряду соответствующий ему вес уравновешивающего образцового сопротивления. Для оставшейся части младших разрядов в этом же поддиапазоне выполняют аналого-цифровое преобразование с коррекцией уравновешивающего сопротивления в большую или меньшую сторону на дискретную величину, соответствующую весу младшего разряда. Устройство для измерения сопротивления твердых тканей зубов содержит электроды, источник опорного напряжения, нуль-орган, фильтр нижних частот, инструментальный усилитель и цифровое измерительное устройство с жидкокристаллическим дисплеем. В него также введены регулятор опорного напряжения, ключи коммутации электродов, резистивный мост, делитель напряжения. Цифровое измерительное устройство с жидкокристаллическим дисплеем выполнено в виде микропроцессорной системы, включающей в себя микропроцессор с подключенными к нему клавиатурой, запоминающим устройством и схемой RS-232 интерфейса. Заявленные способ и устройство позволяют повысить достоверность и воспроизводимость результатов при большом разбросе нормирующих показателей для любых типов зубов у различных пациентов, независимо от возраста, а также осуществить прямое преобразование измеряемого сопротивления в цифровой двоичный код исследуемой локальной области зуба с приведенной относительной погрешностью, не превышающей заданной величины в пределах долей процента, при заданных параметрах электрического постоянного сигнала. 2 н. и 2 з.п. ф-лы, 2 ил.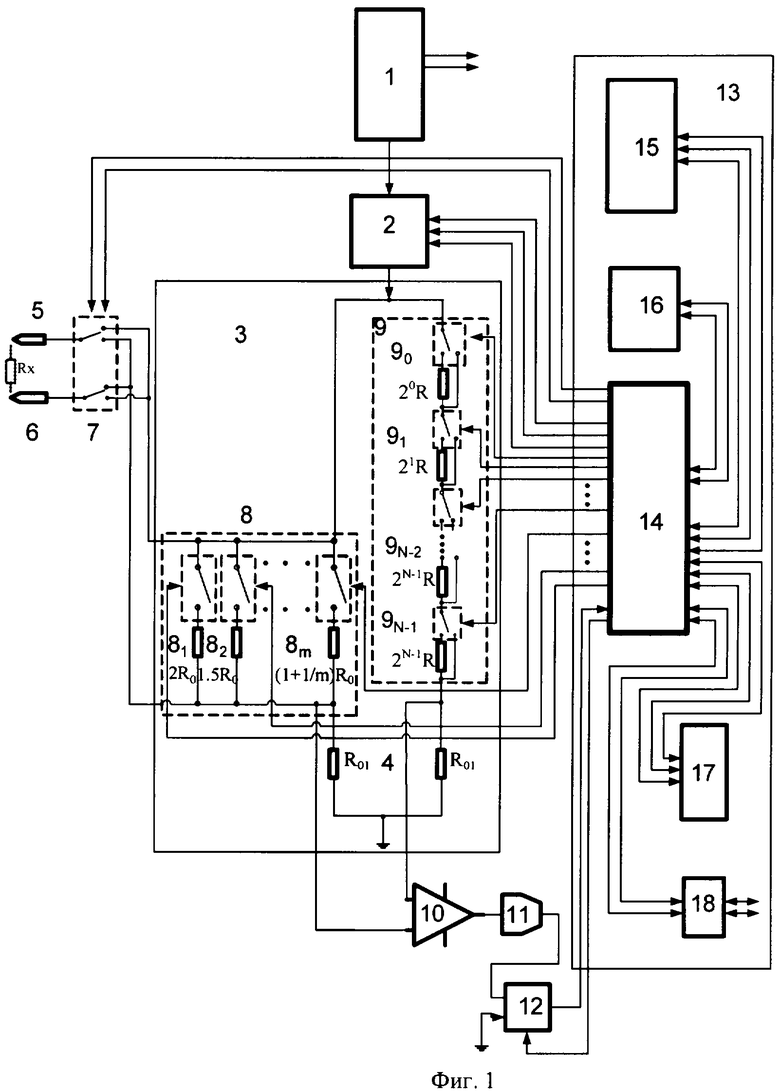
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АКТИВНОЙ И ЕМКОСТНОЙ СОСТАВЛЯЮЩИХ ИМПЕДАНСА БИОЛОГИЧЕСКИХ ТКАНЕЙ | 2000 |
|
RU2196504C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ ЖИВОЙ ТКАНИ | 1998 |
|
RU2137416C1 |
| СПОСОБ ИССЛЕДОВАНИЯ СОСТОЯНИЯ КРОВООБРАЩЕНИЯ ПУЛЬПЫ ЗУБА—РЕОДЕНТОГРАФИЯ | 0 |
|
SU256155A1 |
| ПРОХОНЧУКОВ А.А | |||
| и др | |||
| Функциональная диагностика в стоматологической практике | |||
| - М.: Медицина, 1980, с.74-78. | |||

