Изобретение относится к военной технике и может использоваться в системах радиолокации и зенитных радиолокационно-артиллерийских комплексах надводных кораблей.
Известен комплекс зенитно-ракетного вооружения, содержащий пусковые установки и средства наведения ракетного вооружения, в котором при обнаружении и опознавании цели принимается решение на стрельбу и производится вычисление координат упрежденной точки для стрельбы (RU 2191974 C1). Указанный комплекс предназначен только для решения задачи наведения зенитно-ракетного вооружения на цель.
Известна корабельно-пусковая установка ближнего действия, установленная на корабле и обеспечивающая возможность стрельбы залпом, имеющая небольшие габариты. Установка содержит платформу наведения, расположенные на ней пусковые модули и оптические средства наведения (RU 2256582 C1).
В отличие от указанных аналогов, предлагаемая зенитно-ракетная установка совмещена с антенным постом радиолокатора артиллерийского комплекса, а система наведения и управления стрельбой зенитно-управляемых ракет совмещена с устройствами введения данных и управления стрельбой артустановок. В качестве прицела для обеспечения стрельбы зенитной управляемой ракетой используются радиолокаторы артиллерийского комплекса.
Технический результат состоит в обеспечении всепогодности и увеличении дальности, подготовке данных для стрельбы зенитной управляемой ракетой, в существенном сокращении объема аппаратуры реализуемого ракетного канала; в сокращении времени переноса огня с одной цели на другую при одновременной выработке радиолокационных данных наведения для стрельбы по нескольким целям, в повышении эффективности борьбы артиллерийского комплекса с маневрирующими воздушными целями.
Для этого в системе наведения зенитно-ракетной установки в составе корабельного радиолокационно-артиллерийского комплекса, содержащей расположенную на неподвижном основании поворотную платформу наведения с опорно-поворотным устройством, имеющим приводы вертикального и горизонтального поворота, приемопередающую антенну системы наведения с приводом горизонтального поворота, поворотная платформа наведения выполнена с возможностью установки на ней пусковых модулей зенитных управляемых ракет, неподвижное основание, выполненное полым, внутри которого расположены приводы горизонтального поворота приемопередающей антенны системы наведения и поворотной платформы таким образом, что оси приводов совмещены, пусковые модули расположены на оси привода вертикального поворота и симметрично относительно оси привода горизонтального поворота платформы наведения, линии, соединяющие приемопередающую антенну с системой наведения, пропущены сквозь полое неподвижное основание. Наведение пусковых модулей зенитных управляемых ракет осуществляется в пределах плюс-минус 170° по курсовому углу и от минус 20° до плюс 80° по углу места в системе координат относительно палубы корабля. Расстояние между пусковыми модулями составляет 100-250 см. Система наведения приемопередающей антенны выполнена с возможностью наведения на выбранную цель в режимах кругового обзора, секторного обзора и режима моноимпульсного сопровождения. Опорно-поворотные устройства приемопередающей антенны системы наведения и поворотной платформы зенитно-ракетной установки выполнены с возможностью работы в автономном режиме по сигналам управления от системы наведения, выполненной в виде радиолокационной станции, обеспечивающей обнаружение целей, захват и их точное автоматическое сопровождение. Дополнительно введена приемопередающая камера оптикоэлектронного канала.
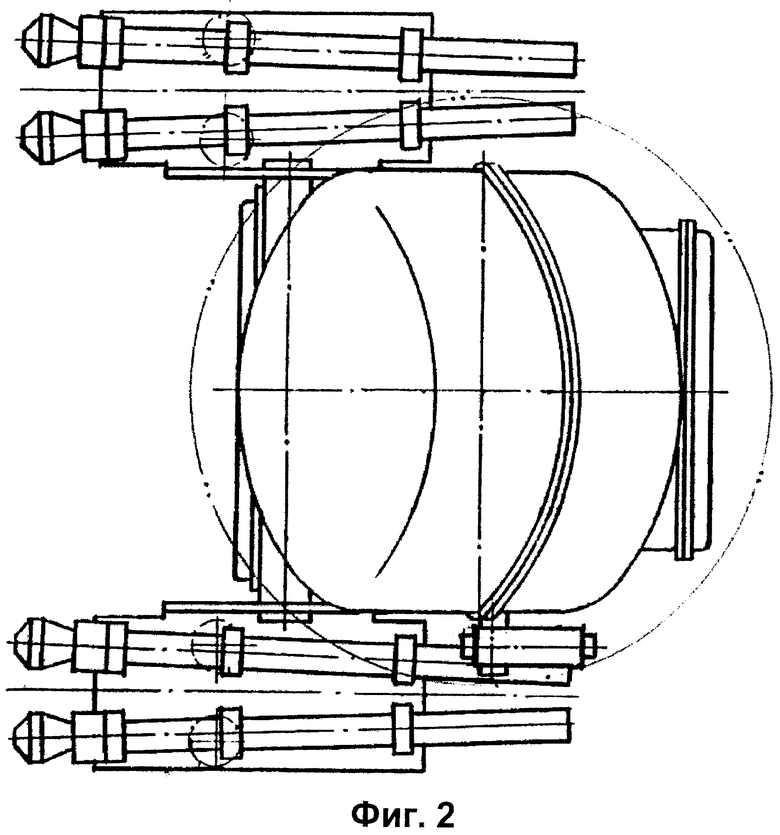
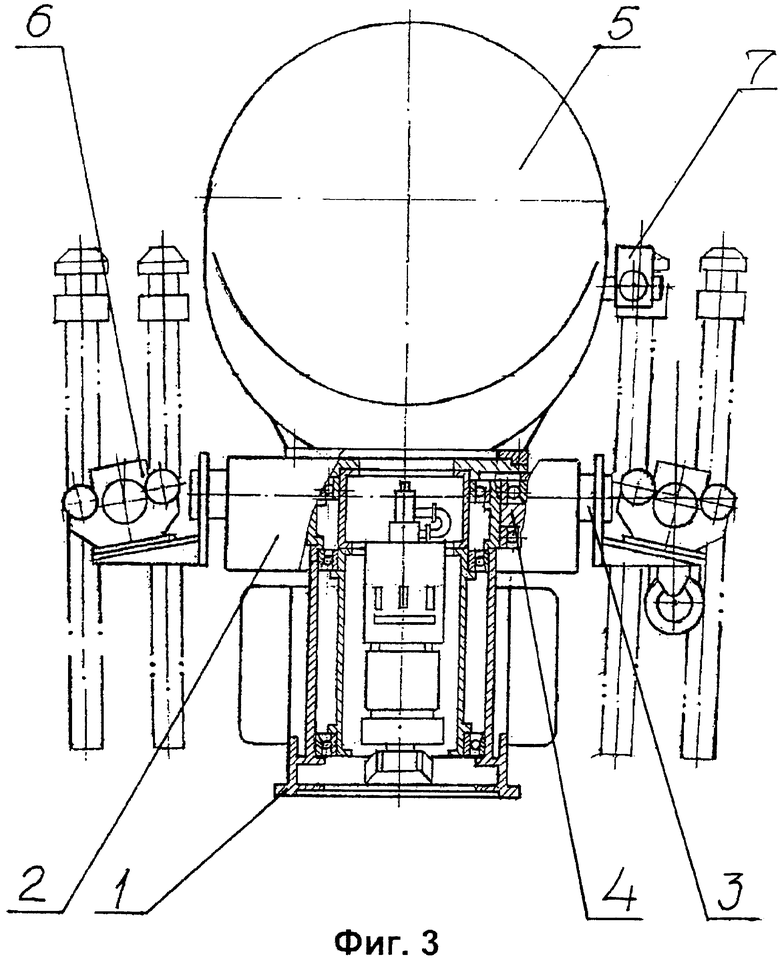
На фиг.1-3 показана схема системы наведения зенитно-ракетной установки: фиг.1 - вид сбоку, фиг.2 - вид сверху, фиг.3 - вид спереди.
Система наведения зенитно-ракетной установки в составе корабельного радиолокационно-артиллерийского комплекса содержит расположенную на неподвижном основании 1 поворотную платформу наведения 2 с опорно-поворотным устройством, имеющим приводы вертикального и горизонтального поворота 3, 4, поворотная платформа наведения 2 выполнена с возможностью установки на ней пусковых модулей 6 зенитных управляемых ракет, приемопередающую антенна 5 системы наведения с приводом горизонтального поворота, неподвижное основание 1, выполненное полым, внутри которого расположены приводы горизонтального поворота приемопередающей антенны 5 системы наведения и поворотной платформы таким образом, что оси приводов совмещены, пусковые модули 6 расположены на оси привода вертикального поворота и симметрично относительно оси привода горизонтального поворота платформы наведения, линии, соединяющие приемопередающую антенну 5 с системой наведения, пропущены сквозь полое неподвижное основание 1, приемопередающую камеру оптикоэлектронного канала 7.
Система наведения зенитно-ракетной установки работает следующим образом.
В автономном режиме: приемопередающая антенна 5 радиолокационной системы осуществляет круговой или секторный обзор в заданных рабочих секторах. Обнаруженные цели радиолокационная станция берет на сопровождение, вырабатывает параметры их движения и ранжирует по степени опасности в соответствии с используемым алгоритмом; на основании параметров движения целей осуществляется их предварительная классификация по группам: пилотируемый самолет, пилотируемый вертолет, противокорабельная ракета. По наиболее опасной цели ЭВМ выдает оператору системы наведения зенитно-ракетной установки рекомендации в диалоговом режиме. По этим рекомендациям оператор:
- включает питание на пусковые модули 6 зенитной управляемой ракеты, на приводы 3, 4 наведения поворотного устройства и на передающую камеру оптикоэлектронного канала 7;
- устанавливает режимы боевого функционирования ракеты;
- подает команду на подготовку зенитной управляемой ракеты к старту и, затем на захват цели ракетой и пуск зенитной управляемой ракеты.
При наличии следующей цели, классифицированной как опасная, и после старта предыдущей ракеты, система начинает выдавать рекомендации оператору для подготовки и пуска следующей ракеты пусковых модулей 6.
Одновременно, по одной из сопровождаемых целей, стоящих на очереди для обстрела, система управления арткомплекса может, в своем штатном режиме, обеспечивать выработку данных, наведение пусковых модулей 6, артустановок и обстрел следующей цели.
В режиме работы по целеуказанию от общекорабельных средств обнаружения система наведения захватывает и сопровождает указанную цель, выполняя далее те же операции, что и при автономном режиме работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЕЛЬНАЯ ПУСКОВАЯ УСТАНОВКА | 2004 |
|
RU2256582C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЗЕНИТНОГО КОМПЛЕКСА С КОМБИНИРОВАННЫМ РАКЕТНО-ПУШЕЧНЫМ ВООРУЖЕНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191974C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| РАКЕТНО-АРТИЛЛЕРИЙСКАЯ ЗЕНИТНАЯ УСТАНОВКА | 2015 |
|
RU2581885C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ВООРУЖЕНИЕМ И КОМПЛЕКС ВЫСОКОТОЧНОГО ВООРУЖЕНИЯ | 2011 |
|
RU2453794C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЗЕНИТНОГО РАКЕТНО-ПУШЕЧНОГО КОМПЛЕКСА | 2012 |
|
RU2506523C1 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
Изобретение относится к области военной техники и может использоваться в системах радиолокации и зенитных ракетно-артиллерийских комплексах надводных кораблей. Система наведения содержит расположенную на неподвижном основании поворотную платформу наведения с опорно-поворотным устройством, приемопередающую антенну системы наведения и неподвижное основание. Платформа наведения имеет приводы вертикального и горизонтального поворота. Внутри основания расположены приводы вертикального и горизонтального поворота приемопередающей антенны. Технический результат состоит в обеспечении всепогодности и увеличении дальности подготовки данных для стрельбы зенитной управляемой ракеты. 5 з.п. ф-лы, 3 ил.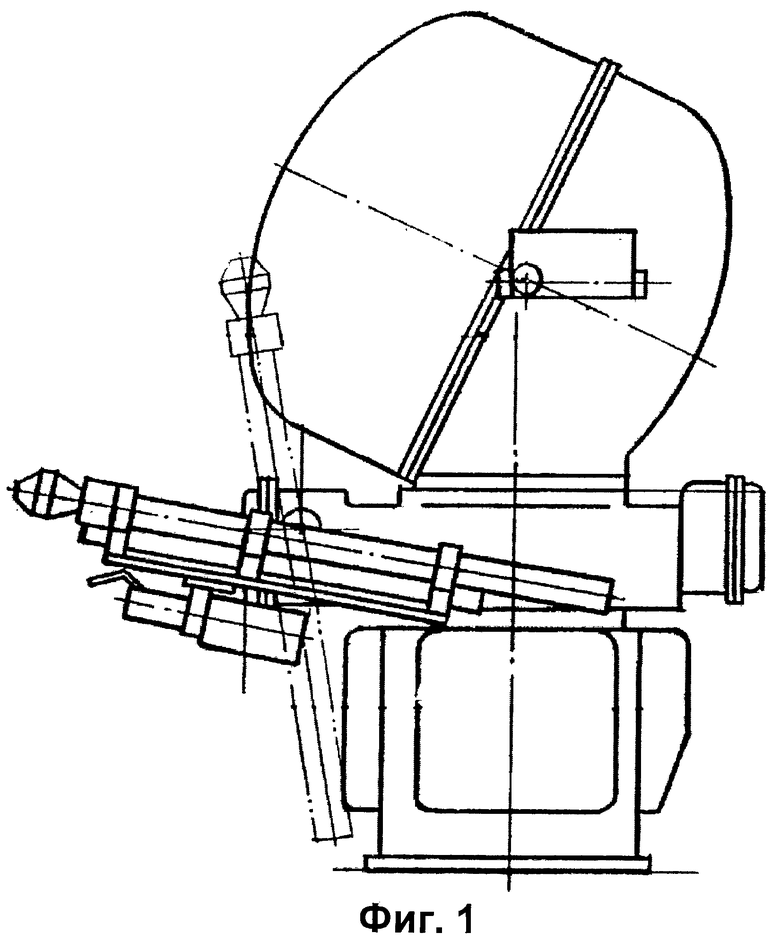
| Ближайший аналог не обнаружен | |||
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2001 |
|
RU2205342C2 |
| КОРАБЕЛЬНАЯ ПУСКОВАЯ УСТАНОВКА | 2004 |
|
RU2256582C1 |
| СПОСОБ ФРАКЦИОНИРОВАНИЯ ТОНКОДИСПЕРСНЫХ ПОРОШКОВ | 1990 |
|
RU2067899C1 |

