Перекрестные ссылки на родственные заявки
По данной заявке испрашивается приоритет предварительной патентной заявки США 60/560223, поданной 7 апреля 2004 г., включенной сюда в качестве ссылки.
Предпосылки изобретения
Область применения изобретения
Варианты осуществления настоящего изобретения, в общем случае, относятся к морской сейсморазведке и, в частности, к способу ослабления эффекта многократных волн от поверхности воды сейсмических сигналах.
Описание уровня техники
Сейсмическая разведка - это способ определения структуры геологических пластов в земле. В сейсмической разведке обычно используются источники сейсмической энергии, которые генерируют сейсмические волны, и сейсмические приемники, которые регистрируют сейсмические волны. Сейсмические волны распространяются в пласты земли, где часть волн отражается от границ раздела между геологическими пластами. Амплитуда и полярность отраженных волн определяются по разностям акустического импеданса между слоями породы, содержащими геологические пласты. Акустический импеданс слоя породы равен произведению скорости распространения акустической волны в слое и плотности слоя. Сейсмические приемники регистрируют отраженные сейсмические волны и преобразуют отраженные волны в репрезентативные электрические сигналы. Сигналы обычно передаются электрическими, оптическими, радио или другими средствами на устройства, записывающие сигналы. Анализируя записанные сигналы (трассы), можно определить форму, положение и состав геологических пластов.
Морская сейсморазведка - это способ определения структуры геологических пластов, находящихся под толщей воды. В морской сейсморазведке обычно используются источники сейсмической энергии и сейсмические приемники, размещенные в воде, которые либо буксируются судном, либо размещаются на морском дне с судна. Источником энергии обычно служит взрывное устройство или система, работающая на сжатом воздухе, которое(ая) генерирует сейсмическую энергию, которая затем распространяется в виде сейсмических волн через слой воды и в геологические пласты под морским дном. Когда сейсмические волны падают на границы раздела между геологическими пластами, часть сейсмических волн отражается через землю и воду к сейсмическим приемникам для регистрации, передачи и записи. Сейсмические приемники, обычно используемые в морской сейсморазведке, представляют собой датчики давления, например гидрофоны. Дополнительно, можно использовать датчики движения, например акселерометры. Источники и приемники можно стратегически переставить, чтобы охватить площадь разведки.
Однако сейсмические волны отражаются не только от границ раздела между геологическими пластами, как хотелось бы. Сейсмические волны также отражаются от морского дна и поверхности воды, и результирующие отраженные волны сами продолжают отражаться. Волны, отражающиеся несколько раз, называются "кратные волны" "или многократные волны". Волны, отражающиеся несколько раз в слое воды между поверхностью воды наверху и морским дном внизу называются "кратные волны от морского дна". Кратные волны от морского дна давно считаются проблемой для обработки и интерпретации сигналов в морской сейсморазведке, поэтому для обработки кратных волн от морского дна были разработаны многочисленные способы ослабления, основанные на уравнении волны. Однако можно определить более обширные множества кратных волн, содержащие кратные волны от морского дна в качестве подмножества. Более обширное множество включает в себя кратные волны с отражениями вверх от границ раздела между геологическими пластами помимо отражений вверх от морского дна. Кратные волны в более обширном множестве имеют вместе с тем отражения вниз на поверхности воды и, таким образом, называются "кратными волнами от поверхности воды". На фиг.1, рассмотренной ниже, показаны примеры разных типов отражений.
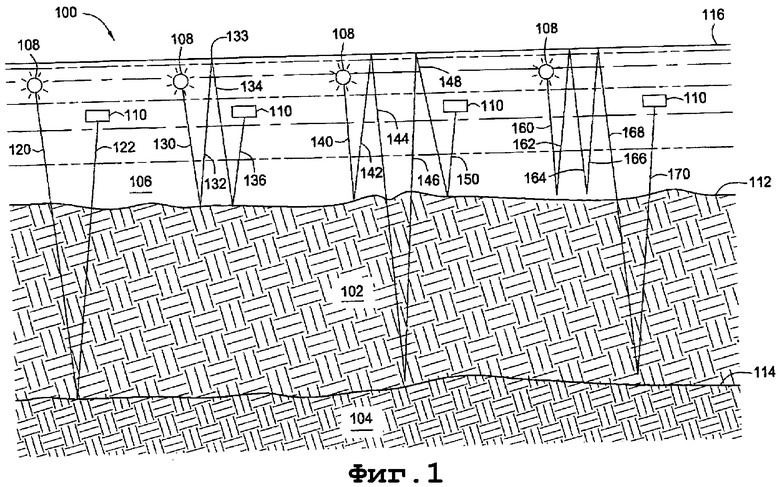
На фиг.1 показана схема морской сейсморазведки. Процедура в целом обозначена позицией 100. Разведываемые геологические пласты, например 102 и 104, лежат ниже слоя воды 106. Источники 108 сейсмической энергии и сейсмические приемники 110 размещаются в слое воды 106 обычно посредством одного или нескольких сейсморазведочных судов (не показаны). Сейсмический источник 108, например пневмопушка, создает сейсмические волны в слое воды 106, и часть сейсмических волн распространяется вниз через воду по направлению к геологическим пластам 102 и 104 под слоем воды 106. Когда сейсмические волны достигают сейсмического отражающего горизонта, часть сейсмических волн отражается вверх и часть сейсмических волн продолжает распространяться вниз. Сейсмическим отражающим горизонтом может быть морское дно 112 или одна из границ раздела между двумя геологическими пластами, например граница раздела 114 между пластами 102 и 104. Когда отраженные волны, распространяющиеся вверх, достигают границы раздела вода/воздух на поверхности воды 116, основная часть волн снова отражается вниз. Продолжая таким образом, сейсмические волны могут отражаться несколько раз между сейсмическими горизонтами, отражающими вверх, например морским дном 112 или границами раздела пластов под ним, и сейсмическим горизонтом, отражающим вниз, на поверхности воды 116 над ним согласно нижеприведенному подробному описанию. Каждый раз, когда отраженные волны распространяются мимо местоположения сейсмического приемника 110, приемник 110 воспринимает отраженные волны и генерирует репрезентативные сигналы.
Однократные отраженные волны - это сейсмические волны, отразившиеся только один раз от морского дна 112 или границы раздела между геологическими пластами до регистрации сейсмическим приемником 110. Пример однократной отраженной волны показан на фиг.1 сейсмическими лучами 120 и 122. Однократные отраженные волны содержат полезную информацию о геологических пластах, что является целью морской сейсморазведки. Кратные волны от поверхности воды - это волны, которые отразились несколько раз между поверхностью воды 116 и любыми сейсмическими горизонтами, отражающим вверх, например морским дном 112 или границами раздела пластов, до регистрации приемником 110. Пример кратной волны от поверхности воды, которая, в частном случае, является кратной волной от морского дна, показан сейсмическими лучами 130, 132, 134 и 136. Точка на поверхности воды 116, в которой волна отражается вниз, в общем случае, называется точкой 133 отражения вниз. Кратная волна от поверхности воды, начинающаяся сейсмическим лучом 130, - это кратная волна первого порядка, поскольку кратная волна содержит одно отражение от поверхности воды 116. Два примера общего вида кратных волн от поверхности воды с отражениями вверх от морского дна 112 и границ раздела пластов показаны сейсмическими лучами 140, 142, 144, 146, 148 и 150 и сейсмическими лучами 160, 162, 164, 166, 168 и 170. Последние два примера кратных волн от поверхности воды являются кратными волнами второго порядка, поскольку кратные волны содержат два отражения от поверхности воды 116. В общем случае, кратная волна от поверхности воды имеет порядок i, если кратная волна содержит i отражений от поверхности воды 116. Кратные волны от поверхности воды являются внешним шумом, который маскирует полезный сигнал однократной отраженной волны.
Ослабление кратных волн от поверхности воды является инверсией до суммирования записанного волнового поля, которая удаляет все порядки всех кратных волн от поверхности воды, присутствующие в морском сейсмическом сигнале. В отличие от некоторых алгоритмов ослабления кратных волн на основе уравнения волны ослабление кратных волн от поверхности воды не требует никакого моделирования или гипотез, касающихся позиций, форм и коэффициентов отражения отражающих горизонтов, приводящих к образованию кратных волн. Напротив, ослабление кратных волн от поверхности воды опирается на внутреннюю физическую взаимосвязь между однократными и кратными событиями, которая должна иметь место в любом правильно записанном массиве данных морской сейсморазведки. Информация, необходимая для процесса ослабления кратных волн от поверхности воды, уже содержится в сейсмических данных.
Различные способы, отвечающие уровню техники, были использованы для удаления кратных волн от поверхности воды из записанных трасс. Было обнаружено, например, что время распространения кратной волны от морского дна является функцией "смещения", расстояния между источником и приемником и числа раз, сколько кратная волна отражается от поверхности. Например, если кратная волна отражается от поверхности один раз, прежде чем будет записана микрофоном, и смещение равно нулю, время распространения кратной волны ровно в два раза больше, чем для главных волн. Этот факт используется в различных схемах для удаления кратных волн.
Другие способы предусматривают сложные схемы трассировки луча, позволяющие генерировать искусственную кратную волну и вычитать ее из фактической волны для получения записи, предположительно свободной от кратных волн. Однако эти способы очень громоздки, поскольку требуют большого объема информации о структуре под морским дном, а также конфигурации морского дна для генерации искусственной волны. Аналогичные искусственные кратные волны можно генерировать с использованием более точных методов, непосредственно не требующих трассировки лучей, например методов распространения полей, но все же они требуют подробной информации, по меньшей мере, о морском дне, а также о форме сейсмических горизонтов под морским дном, и потому не столь практичны, как хотелось бы.
Итак, в технике существует необходимость в усовершенствованном способе удаления записи событий многократного отражения от поверхности из сейсмограмм в целях обработки сейсмических данных.
Сущность изобретения
Варианты осуществления настоящего изобретения, в общем случае, относятся к способу прогнозирования совокупности кратных волн от поверхности воды для совокупности трасс в сейсмограмме. Согласно одному варианту осуществления изобретения способ включает в себя этапы, на которых: обеспечивают совокупность целевых трасс с номинальным смещением и номинальным азимутом; выбирают совокупность пар входных трасс, в которой средние точки входных трасс в каждой паре отстоят друг от друга на половину номинального смещения, и азимут линии, соединяющей средние точки входных трасс в каждой паре, равен номинальному азимуту; производят свертку выбранных пар входных трасс для генерации совокупности сверток; и применяют к сверткам трехмерный оператор.
Согласно другому варианту осуществления способ включает в себя этапы, на которых: делят совокупность целевых трасс на одну или более групп в соответствии со смещениями; делят каждую группу на одну или несколько подгрупп в соответствии с азимутами; выбирают первую подгруппу, имеющую первое номинальное смещение и первый номинальный азимут; выбирают совокупность пар входных трасс, в которой средние точки входных трасс в каждой паре отстоят друг от друга на половину первого номинального смещения, и азимут линии, соединяющей средние точки входных трасс в каждой паре, равен первому номинальному азимуту; производят свертку выбранных пар входных трасс для генерации совокупности сверток; и применяют к сверткам трехмерный оператор.
Согласно еще одному варианту осуществления способ включает в себя этапы, на которых: обеспечивают совокупность целевых трасс с номинальным смещением; прогнозируют совокупность двухмерных кратных волн от поверхности воды для совокупности входных подповерхностных линий; и применяют к прогнозируемым двухмерным поверхностным кратным волнам двухмерный оператор.
Краткое описание чертежей
Для более детального понимания вышеперечисленных признаков настоящего изобретения, более конкретное описание изобретения, кратко изложенного выше, приведено со ссылкой на варианты осуществления изобретения, некоторые из которых проиллюстрированы в прилагаемых чертежах. Следует отметить, что прилагаемые чертежи иллюстрируют только типичные варианты осуществления данного изобретения, поэтому их не следует рассматривать в порядке ограничения его объема, поскольку изобретение допускает другие, в равной степени эффективные варианты осуществления.
Фиг.1 - схема морской сейсморазведки.
Фиг.2 - логическая блок-схема способа осуществления трехмерного прогнозирования кратных волн от поверхности воды согласно одному или нескольким вариантам осуществления изобретения.
Фиг.3 - логическая блок-схема способа осуществления трехмерного прогнозирования кратных волн от поверхности воды согласно одному или нескольким вариантам осуществления изобретения.
Фиг.4 - плоский вид геометрии сбора данных согласно одному или нескольким вариантам осуществления изобретения.
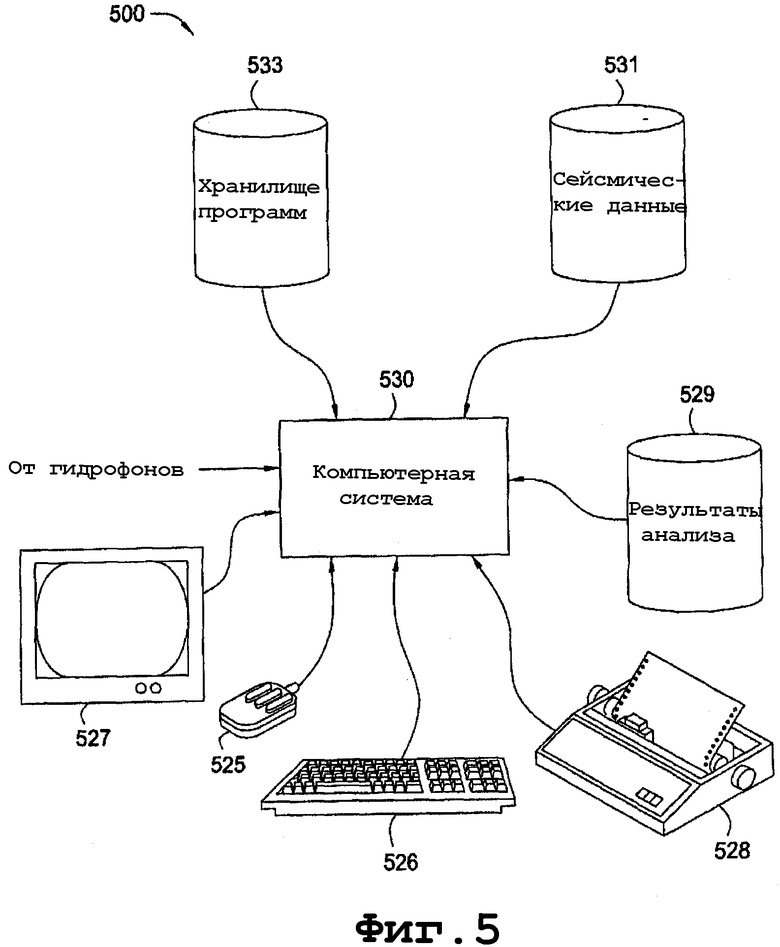
Фиг.5 - схема компьютерной сети, в которой можно реализовать различные варианты осуществления изобретения.
Подробное описание изобретения
На фиг.2 изображена логическая блок-схема способа 200 осуществления прогнозирования трехмерных кратных волн от поверхности воды согласно одному или нескольким вариантам осуществления изобретения. На этапе 210 множество целевых трасс делится на одну или несколько групп в соответствии со смещениями. Каждая группа содержит целевые трассы со смещениями в указанном диапазоне, причем смещение определяется как расстояние по горизонтали между источником и приемником. Множество целевых трасс задает местоположения, в которых нужно прогнозировать кратные волны. Диапазоны смещения простираются от минимального смещения в множестве целевых трасс, которое обычно соответствует положению приемника, наиболее близкому к корме судна, например около 100 метров, до максимального смещения в множестве целевых трасс, которое обычно соответствует положению приемника, наиболее удаленному от кормы судна, например около 6000 метров. Каждый диапазон смещения имеет значение номинального смещения, которое обычно является центральным значением смещения в этом диапазоне. Например, целевые трассы со смещениями от 100 метров до 150 метров могут быть организованы в одном диапазоне со значением номинального смещения 125 метров, и целевые трассы со смещениями от 150 метров до 200 метров могут быть организованы в другом диапазоне со значением номинального смещения 175 метров.
На этапе 220 выбирается группа, например первая группа, целевых трасс со смещениями в первом диапазоне смещений. На этапе 230 выбранная группа целевых трасс делится на одну или несколько подгрупп целевых трасс в соответствии с азимутами. Азимут определяется как угол между линией, которая соединяет источник и приемник, и некоторым фиксированным направлением, которое обычно является направлением вдоль линии приема. Каждый диапазон азимутов имеет номинальное значение, которое обычно является центральным значением этого диапазона. Таким образом, все целевые трассы в подгруппе имеют одинаковые или близкие азимуты (или имеют один и тот же номинальный азимут) и одинаковые или близкие смещения (или имеют одно и то же номинальное смещение). На этапе 240 выбирается подгруппа, например первая подгруппа, целевых трасс. Первая подгруппа целевых трасс имеет первое номинальное смещение и первый номинальный азимут.
На этапе 250 выбирается множество входных трасс. Входные трассы это трассы, на основании которых вычисляются прогнозируемые кратные волны. Согласно одному варианту осуществления выбирается множество входных трасс при половине номинального смещения для выбранной подгруппы целевых трасс. Однако можно выбирать множество входных трасс в любом диапазоне смещения. Согласно другому варианту осуществления входные трассы интерполируются и регуляризуются. Альтернативно, несколько смещений можно объединять и/или промежуточно суммировать для улучшения дискретизации и отношения сигнал/шум.
На этапе 260 выбранные входные трассы подвергаются предварительной обработке для моделирования трасс с нулевым смещением. Выбранные входные трассы можно подвергать предварительной обработке различными способами, известными из уровня техники, например способом кинематической поправки, полной миграции/демиграции и т.п. Входные трассы могут размещаться в своих средних точках. Таким образом, каждая предварительно обработанная входная трасса моделирует трассу, которая была бы записана, если бы источник и приемник располагались в средней точке.
На этапе 270 каждая пара выбранных, предварительно обработанных входных трасс подвергается свертке для генерации множества сверток. Пары выбираются так, чтобы разнесение между средними точками трасс в каждой паре было равно половине номинального смещения для выбранной подгруппы целевых трасс и чтобы азимут линии, соединяющей средние точки трасс в каждой паре, был равен номинальному азимуту выбранной подгруппы целевых трасс. Каждая свертка может располагаться в средней точке линии, соединяющей средние точки двух трасс в каждой паре. Входные трассы также можно интерполировать для формирования сверток. При формировании сверток также можно учитывать фактические или возможные наклоны структур.
На этапе 280 трехмерный оператор применяется ко множеству сверток и результат помещается в средних точках выбранной подгруппы целевых трасс. Согласно одному варианту осуществления трехмерный оператор является трехмерным оператором демиграции со смещением, равным половине номинального смещения выбранной подгруппы целевых трасс, и скоростью, равной половине скорости в воде. В этом случае результат можно рассматривать как демигрированные свертки. Другим примером трехмерного оператора является постсуммированная (с нулевым смещением) демиграция с последующими инверсной поправкой на угол наклона отражающего горизонта (DMO) и инверсной кинематической поправкой. Таким образом, можно прогнозировать кратные волны от поверхности воды для выбранной подгруппы целевых трасс. Согласно одному варианту осуществления результат можно корректировать от номинальных смещения и азимута к фактическим смещению и азимуту. Например, коррекцию смещения можно осуществлять с использованием дифферентной кинематической поправки, и коррекцию азимута можно осуществлять путем интерполяции от соседних азимутов.
Альтернативно, входные трассы можно подвергать свертке с их исходным смещением, и свертки можно корректировать до применения трехмерного оператора. Коррекцию можно осуществлять с использованием кинематической поправки с половинной скоростью (или удвоенным смещением).
На этапе 285 производится определение, существует ли другая подгруппа, например вторая подгруппа, целевых трасс со вторым номинальным азимутом. Если ответ утвердительный, то обработка возвращается к этапу 240, на котором выбирается вторая подгруппа целевых трасс. Затем обработка проходит этапы 250-280, на которых множество входных трасс (которое может совпадать или не совпадать с первым множеством) обрабатывается с использованием номинального азимута второй подгруппы целевых трасс для прогнозирования кратных волн для этих трасс. Этапы 240-285 продолжаются, пока не будут обработаны все подгруппы в выбранной группе.
Если ответ отрицательный, то обработка переходит к этапу 290, на котором производится определение, существует ли другая группа, например вторая группа, целевых трасс со вторым номинальным смещением. Если ответ утвердительный, то обработка возвращается к этапу 220, на котором выбирается вторая группа целевых трасс со вторым номинальным смещением. Затем обработка проходит этапы 230-285, на которых одно или несколько множеств входных трасс обрабатываются с использованием номинального смещения для второй группы целевых трасс для прогнозирования кратных волн для этих трасс. Этапы 220-290 продолжаются, пока не будут обработаны все группы во множестве целевых трасс.
Согласно одному варианту осуществления способ 200 можно использовать для трехмерного прогнозирования кратных волн от поверхности воды, когда существует существенное отклонение буксируемой косы (кабеля). Согласно другому варианту осуществления способ 200 можно использовать для прогнозирования кратных волн с указанным азимутом, и поэтому можно учитывать изменения азимута в сейсмических данных. Эти изменения азимута могут являться значительным источником ошибки в прогнозируемых кратных волнах. Поэтому согласно другому варианту осуществления изобретения способ 200 можно использовать для прогнозирования ошибок по аналогии с тем, как это делается согласно способам прогнозирования двухмерных и трехмерных кратных волн в двух или трех измерениях от поверхности воды, описанных в патентной заявке США №10/668927, включенной сюда посредством ссылки.
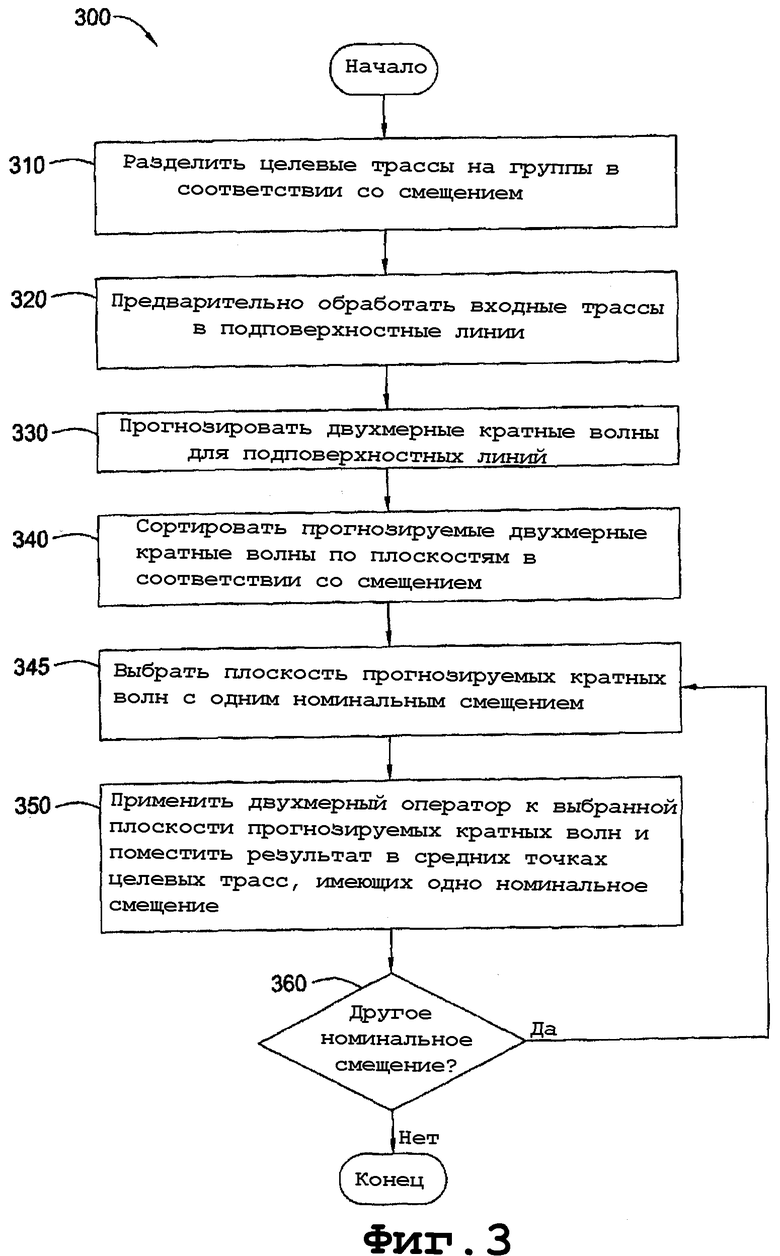
На фиг.3 изображена логическая блок-схема способа 300 осуществления трехмерного прогнозирования кратных волн от поверхности воды согласно одному или нескольким вариантам осуществления изобретения. На этапе 310 множество целевых трасс делится на одну или несколько групп трасс в соответствии со смещениями. Множество целевых трасс задает местоположение, где необходимо прогнозировать кратные волны. Каждая группа содержит целевые трассы со смещениями в указанном диапазоне. Как и для целевых трасс, описанных со ссылкой на этап 210, каждый диапазон смещения может иметь значение номинального смещения, который обычно является центральным значением смещения в этом диапазоне.
На этапе 320 запись входных сейсмических трасс подвергается предварительной обработке. Иными словами, запись входных сейсмических трасс делится на входные подповерхностные линии (SSL), и каждая входная SSL регуляризуется согласно традиционным методам регуляризации, известным специалистам в данной области техники. После регуляризации смещение в направлении, перпендикулярном линиям приема, между каждым источником и приемником равно нулю и смещение в направлении линий приема между каждым источником и приемником является регулярным. После регуляризации записи входных сейсмических трасс ко входным SSL регуляризованные трассы экстраполируются согласно традиционным методам экстраполяции, известным специалистам в данной области техники. После экстраполяции промежуток между каждым источником и приемником, ближайшим к источнику на каждой входной SSL, заполняется экстраполированными приемниками. В результате каждая входная SSL имеет трассы с нулевым смещением в направлении, перпендикулярном линиям приема, и регулярно увеличивающимся смещением в направлении линий приема начиная с нуля.
На этапе 330 кратные волны в двух измерениях от поверхности воды для каждой входной SSL прогнозируются с использованием традиционного алгоритма двухмерного прогнозирования, известного специалистам в данной области техники. На этапе 340 прогнозируемые двухмерные поверхностные кратные волны сортируются по одной или нескольким плоскостям (или группам) в соответствии со смещениями. Каждая плоскость содержит кратные волны в указанном диапазоне смещений. Каждый диапазон смещения может иметь значение номинального смещения, которое обычно равно центральному значению смещения в этом диапазоне. На этапе 345 выбирается плоскость прогнозируемых двухмерных поверхностных кратных волн с номинальным смещением, например первым номинальным смещением.
На этапе 350 двухмерный оператор применяется к плоскости прогнозируемых двухмерных поверхностных кратных волн в двух измерениях, и результат располагается в средних точках группы целевых трасс с первым номинальным смещением. Двухмерный оператор может быть двухмерным оператором демиграции со скоростью, равной половине скорости в воде или половине скорости однократной волны. Таким образом, при прогнозировании кратных волн в двух измерениях учитываются изменения во входных SSL в направлении вдоль линий приема и двухмерный оператор учитывает изменения во входных SSL в направлении, перпендикулярном линиям приема.
На этапе 360 производится определение, существует ли плоскость прогнозируемых поверхностных кратных волн в двух измерениях со вторым номинальным смещением. Если ответ утвердительный, то обработка возвращается к этапу 345, на котором выбирается плоскость прогнозируемых поверхностных кратных волн в двух измерениях со вторым номинальным смещением. Затем обработка переходит к этапу 350, на котором двухмерный оператор применяется к плоскости прогнозируемых поверхностных кратных волн в двух измерениях со вторым номинальным смещением, и результат располагается в средних точках группы целевых трасс со вторым номинальным смещением. Этапы 345-360 продолжаются, пока не будут обработаны все прогнозируемые поверхностные кратные волны в двух измерениях с различными номинальными смещениями. Согласно одному варианту осуществления способ 300 можно использовать для трехмерного прогнозирования кратных волн от поверхности воды, когда все буксируемые косы (или кабели), по существу, параллельны друг другу с пренебрежимо малым отклонением.
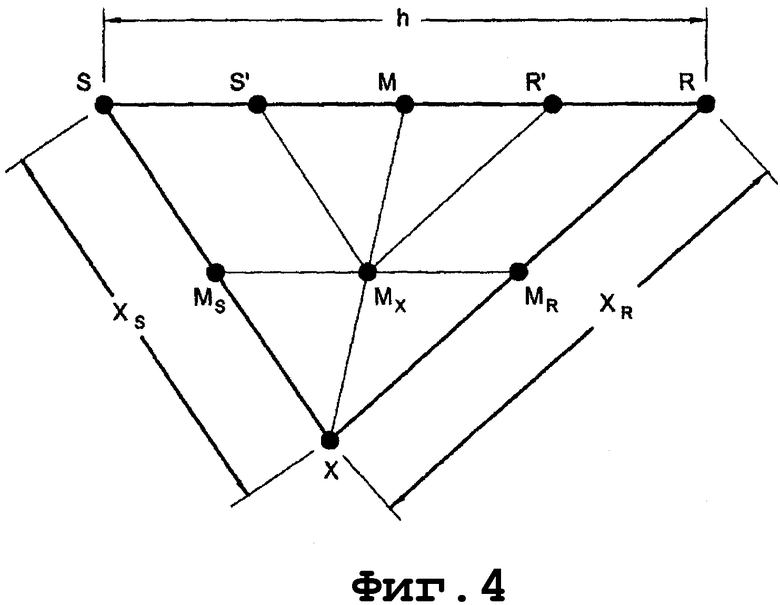
В следующих абзацах приведены математические выкладки для способов 200 и 300 согласно одному или нескольким вариантам осуществления изобретения. На фиг.4 показан плоский вид геометрии сбора данных согласно одному или нескольким вариантам осуществления изобретения. Кратные волны от поверхности воды для трассы (S, R), с источником в S и приемником в R, подлежат прогнозированию. M и h определены как средняя точка и смещение (S, R) соответственно. X определена как потенциальная точка отражения вниз (DRP) для кратных волн от поверхности воды.
Трехмерное прогнозирование кратных волн от поверхности воды можно осуществлять посредством операции свертки трассы (S, X) с трассой (X, R) и суммирования этих сверток по всем возможным X. Для этого трассы (S, X) и (X, R), в общем случае, нужно оценить на основании записанных трасс. Один подход к оценке трассы (S, X) состоит в применении дифферентной кинематической поправки к трассе с аналогичной средней точкой, Ms, на основании записанного набора данных и с аналогичным смещением. Трассу (X, R) можно оценить аналогичным образом. Дифферентная кинематическая поправка, применяемая к трассе, используемой для оценки (S, X), зависит не только от ее смещения, но и от смещения из S в X, обозначенного xs на фиг.4. Обычно, данная записанная трасса будет использоваться только для оценки одной трассы для каждой подповерхностной линии (SSL) в процессе прогнозирования, но она будет использоваться на каждой SSL с данной апертурой записанной трассы. Поэтому дифферентную кинематическую поправку и свертку можно повторно применять для каждой SSL, для которой требуется прогнозирование.
Кинематическую поправку и свертку можно менять местами, т.е. трассы со средними точками в Ms и Mr можно подвергать свертке до применения кинематической поправки, и результирующую ошибку можно корректировать после операции свертки. Записанные трассы можно обрабатывать для аппроксимации (кинематической) трасс с нулевым смещением в средних точках. Для простой первого порядка кратной волны от горизонтального отражающего горизонта в момент t0 в среде с постоянной скоростью, имеющей скорость v, однократные отраженные волны имеют место в момент t0 на трассах с нулевым смещением в Ms и Mr и в момент 2t0 на их свертке. Время распространения однократной отраженной волны на трассе (S, X) выражается как
и аналогично для трассы (X, R), так что время распространения на свертке этих трасс выражается как

Соответственно, послесверточная поправка осуществляется для отображения события в момент 2t0 на момент t(X). При этом оператор демиграции постоянной скорости со скоростью V отображает мигрированное время tm в демигрированное время td, заданное как

где Xs и XR - расстояния от мигрированного местоположения до демигрированных местоположения источника и приемника соответственно. Уравнение (3) имеет аналогичную форму по отношению к послесверточной поправке. Таким образом, если tm=2t0 и td=t(X), то уравнение (3) принимает вид

Уравнение (4) было бы идентичным в отношении послесверточной поправки, если бы свернутая трасса находилась в X, и Xs=xs, XR=xR и V=ν. Однако положение X зависит от S и R, поэтому демиграция повторяется всякий раз, когда изменение (S, R) приводит к изменению X. Свернутая трасса может находиться в "мигрированном положении" Mx, средней точке Ms и MR, которая не зависит от S или R, а только от Ms и Mr. Если S' и R' определены как средние точки (S, M) и (M, R) соответственно, то расстояния от Mx до S' и R' равны xs/2 и xr/2 соответственно. Следовательно, демиграция из Mx в (S', R') дает демигрированное время распространения, заданное уравнением (3) с Xs=xs/2 и XR=Xr/2, что обеспечивает нужное демигрированное время распространения, если скорость V= ν/2.
Заметим, что (Ms, Mr) параллельна (S, R) и смещение из Ms в MR равно h/2. Соответственно, если смещение и азимут (S, R) фиксированы, то смещение и азимут (Ms, Mr) также известны. Если Mx определена и объем данных, кинематически отображенных в нулевое смещение, доступен, то Ms и Mr можно определить, и соответствующие трассы можно подвергнуть свертке из этого объема, тем самым помещая свертку в новый объем в положении Mx. Повторяя эти операции для всех Mx и затем демигрируя объем при постоянном смещении (h/2) и азимут (определенный выше) со скоростью ν/2, получаем прогнозируемые кратные волны для всей плоскости смещения.
Одно различие между вариантами осуществления изобретения и уровнем техники состоит в том, что трассы подвергаются свертке при фиксированном (часто нулевом) смещении до коррекции смещения. Повышенная производительность согласно различным вариантам осуществления изобретения достигается за счет некоторых аппроксимаций при выводе алгоритма. Теория и испытания показали, что, во многих случаях, прогнозируемые кратные волны по-прежнему достаточно точны, чтобы их можно было адаптивно вычитать. При значительных эффектах наклона в перпендикулярном направлении кратные волны, прогнозируемые с использованием различных вариантов осуществления изобретения, будут гораздо точнее, чем прогнозируемые с помощью алгоритма двухмерной кратной волны от поверхности воды.
На фиг.5 показана компьютерная сеть 500, в которой можно реализовать варианты осуществления изобретения. Компьютерная сеть 500 включает в себя системный компьютер 530, который может быть реализован как любой традиционный персональный компьютер или рабочая станция, например рабочая станция на базе UNIX. Системный компьютер 530 связан с дисковыми запоминающими устройствами 529, 531 и 533, которые могут представлять собой внешние жесткие диски. Предусмотрено, что дисковые запоминающие устройства 529, 531 и 533 являются традиционными жесткими дисками и, таким образом, реализованы посредством локально-сетевого или удаленного доступа. Конечно, хотя дисковые запоминающие устройства 529, 531 и 533 показаны как отдельные устройства, при желании, для хранения любых и всех программных инструкций, данных измерений и результатов можно использовать единое дисковое запоминающее устройство.
Согласно одному варианту осуществления сейсмические данные от гидрофонов сохраняются в дисковом запоминающем устройстве 531. Системный компьютер 530 может извлекать соответствующие данные из дискового запоминающего устройства 531 для осуществления трехмерного прогнозирования кратной волны от поверхности воды согласно программным инструкциям, которые соответствуют вышеописанным способам. Программные инструкции могут быть написаны на компьютерном языке программирования, например C++, Java и т.п. Программные инструкции могут храниться в компьютерно-считываемой памяти, например программном дисковом запоминающем устройстве 533. Конечно, носитель информации, где хранятся программные инструкции, может относиться к любому традиционному типу, используемому для хранения компьютерных программ, включая жесткие диски, флоппи-диски, CD-ROM и другие оптические носители, магнитную ленту и т.п.
Согласно предпочтительному варианту осуществления изобретения системный компьютер 530 выводит информацию в основном на графический дисплей 527 или, альтернативно, на принтер 528. Системный компьютер 530 может сохранять результаты вышеописанных способов в дисковом запоминающем устройстве 529 для дальнейшего использования и анализа. Системный компьютер 530 может быть снабжен клавиатурой 526 и указательным устройством (например, мышью, шаровым манипулятором и т.п.) 525 для обеспечения интерактивности.
Системный компьютер 530 может находиться в центре обработки данных, удаленном от участка разведки. Системный компьютер 530 связан с гидрофонами (напрямую либо через блок записи, не показан) для приема сигналов, выражающих отраженную сейсмическую энергию. Эти сигналы после традиционного форматирования и другой начальной обработки сохраняются системным компьютером 530 как цифровые данные в дисковом запоминающем устройстве 531 для последующего извлечения и обработки вышеописанным образом. Хотя на фиг.5 показано дисковое запоминающее устройство 531 как непосредственно связанное с системным компьютером 530, предусмотрено также, что доступ к дисковому запоминающему устройству 531 можно осуществлять посредством локальной сети или удаленного доступа. Кроме того, хотя дисковые запоминающие устройства 529, 531 показаны как отдельные устройства для хранения входных сейсмических данных и результатов анализа, дисковые запоминающие устройства 529, 531 могут быть реализованы в едином дисководе (совместно или отдельно от программного дискового запоминающего устройства 533), или любым другим традиционным способом, очевидным специалисту в данной области, ознакомившемуся с данным описанием изобретения.
Хотя вышеизложенное относится к вариантам осуществления настоящего изобретения, можно предложить другие и дополнительные варианты осуществления изобретения, не выходя за рамки его объема, который определяется нижеприведенной формулой изобретения.
Изобретение относится к морской сейсморазведке и, в частности, к способу ослабления эффекта многократных волн от поверхности воды при сейсмических сигналах. Данное изобретение направлено на создание усовершенствованного способа удаления записи событий многократного отражения от поверхности из сейсмограмм в целях обработки сейсмических данных. Способ прогнозирования совокупности кратных волн от поверхности воды для совокупности трасс в сейсмограмме включает в себя этапы, на которых: воспринимают сейсмические данные посредством приемника; обеспечивают совокупность целевых трасс с номинальным смещением и номинальным азимутом; выбирают совокупность пар входных трасс, в которой средние точки входных трасс в каждой паре отстоят друг от друга на половину номинального смещения, и азимут линии, соединяющей средние точки входных трасс в каждой паре, равен номинальному азимуту; производят свертку выбранных пар входных трасс для генерации совокупности сверток; и применяют к сверткам трехмерный оператор. Кроме того, модификация предложенного способа может содержать такие этапы, на которых: воспринимают сейсмические данные посредством приемника; обеспечивают совокупность целевых трасс с номинальным смещением; прогнозируют совокупность кратных волн в двух измерениях от поверхности воды для совокупности входных подповерхностных линий; и применяют к прогнозируемым поверхностным кратным волнам в двух измерениях двухмерный оператор. 3 н. и 24 з.п. ф-лы, 5 ил.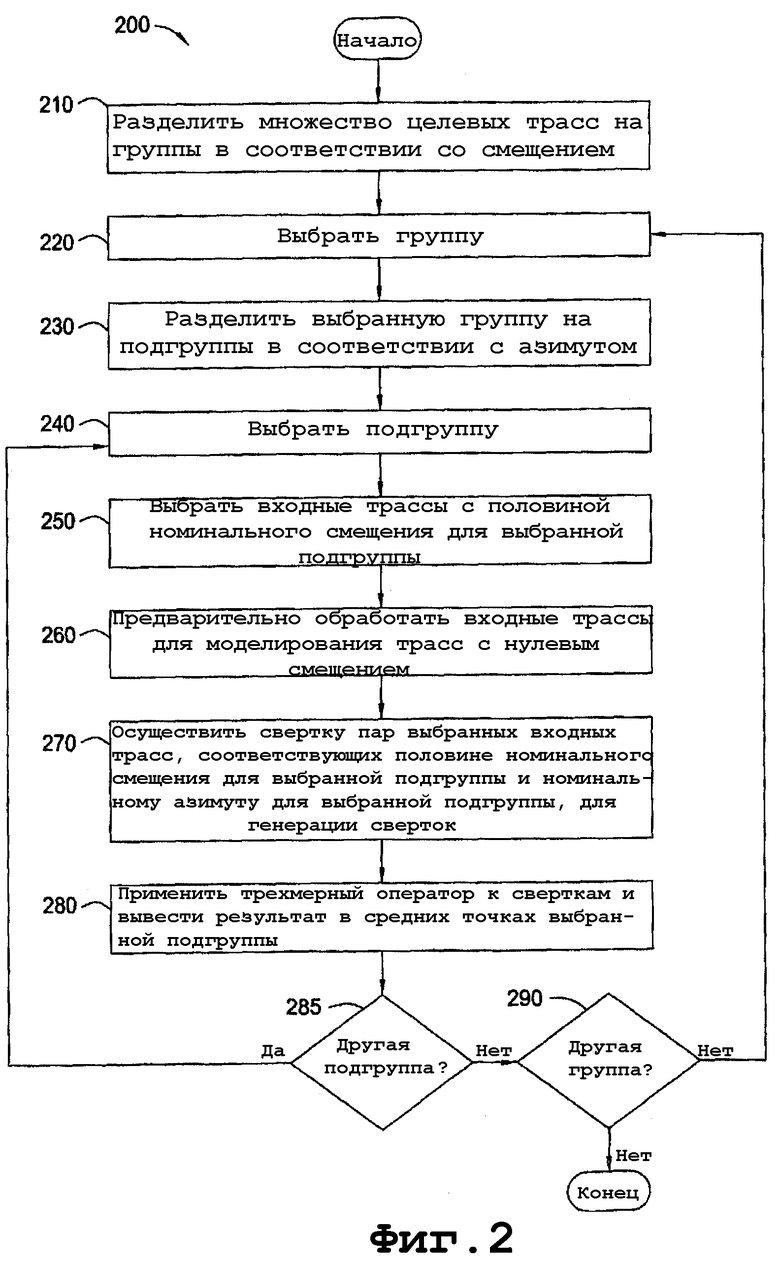
воспринимают сейсмические данные посредством приемника,
обеспечивают совокупность целевых трасс с номинальным смещением и номинальным азимутом,
выбирают совокупность пар входных трасс, в которой средние точки входных трасс в каждой паре отстоят друг от друга на половину номинального смещения, и азимут линии, соединяющей средние точки входных трасс в каждой паре, равен номинальному азимуту,
производят свертку выбранных пар входных трасс для генерации совокупности сверток, и
применяют к сверткам трехмерный оператор.
воспринимают сейсмические данные посредством приемника,
делят совокупность целевых трасс на одну или несколько групп в соответствии со смещениями,
делят каждую группу на одну или несколько подгрупп в соответствии с азимутами,
выбирают первую подгруппу, имеющую первое номинальное смещение и первый номинальный азимут,
выбирают совокупность пар входных трасс, в которой средние точки входных трасс в каждой паре отстоят друг от друга на половину первого номинального смещения, и азимут линии, соединяющей средние точки входных трасс в каждой паре, равен первому номинальному азимуту,
производят свертку выбранных пар входных трасс для генерации совокупности сверток, и
применяют к сверткам трехмерный оператор.
воспринимают сейсмические данные посредством приемника,
обеспечивают совокупность целевых трасс с номинальным смещением,
прогнозируют совокупность кратных волн в двух измерениях от поверхности воды для совокупности входных подповерхностных линий, и
применяют к прогнозируемым поверхностным кратным волнам в двух измерениях двухмерный оператор.
| DRAGOSET W.H | |||
| et al "Some remarks on surface multiple attenuation" GEOPHYSICS SOC | |||
| EXPLORATION GEOPHYSICISTS, vol.63, №2, апрель 1998, стр.777-778 | |||
| US 4887243 А, 12.12.1989 | |||
| US 6169959 В1, 02.01.2001 | |||
| US 5430689 А, 04.07.1995 | |||
| US 5392255 A, 21.02.1995. |

