Испрашивание приоритета
В настоящей заявке на патент испрашивается приоритет в соответствии с предварительной заявкой № 60/511,254 под названием "DATA RATE CONTROL IN SHO AND DURING CELL-SWITCHING", поданной 14 октября 2003 г., и предварительной заявкой № 60/529,135, под названием "DATA RATE CONTROL IN SHO AND DURING CELL-SWITCHING", поданной 11 декабря 2003 г., права на обе из которых принадлежат заявителю данной заявки, и тем самым приведены здесь полностью в качестве ссылки.
УРОВЕНЬ ТЕХНИКИ
Область техники, к которой относится изобретение
Изобретение в общем относится с беспроводной связи и более конкретно к управлению скоростью передачи данных в системе беспроводной связи.
Уровень техники
Системы беспроводной связи используются для многих вариантов применения, включая, например, пейджинговую передачу данных, беспроводные локальные телефонные линии (WLL, БЛЛ), Интернет-телефония, беспроводные телефонные и спутниковые системы связи. Пример применения беспроводной телефонной системы представляет собой систему сотовой телефонной связи для удаленных абонентов, которые часто являются мобильными. В типичной сотовой телефонной системе мобильные абоненты или мобильные станции передают и принимают сигналы из различных базовых станций в пределах инфраструктуры беспроводной сети системы связи, во время движения мобильной станции.
Современные беспроводные системы связи, такие как системы сотовой телефонной связи, обычно разработаны так, что позволяют обеспечивать для множества пользователей или абонентов возможность доступа к общей среде связи. Различные технологии были разработаны для таких систем беспроводной связи с множественным доступом, включая многостанционный доступ с кодовым разделением каналов (CDMA), многостанционный доступ с временным разделением каналов (TDMA) и множественный доступ с разделением частот (FDMA). В соответствии с такими технологиями множественного доступа кодируют, модулируют, декодируют и демодулируют сигналы, передаваемые и принимаемые между множеством пользователей и инфраструктурой беспроводной сети, обеспечивая, таким образом, возможность одновременной связи между множеством пользователей и обеспечивая относительно большую пропускную способность для систем связи.
В системе беспроводной связи на основе CDMA доступный спектр радиочастот (РЧ) эффективно совместно используется множеством пользователей. В системах беспроводной связи обычно передают голосовые сообщения и в последнее время также стали доступными системы с расширенным возможностями по предоставлению услуг передачи данных. Пример таких систем связи, предоставляющих услуги передачи данных, может быть представлен системой высокоскоростной передачи данных (HDR, ВСП), которая соответствует спецификации Telecommunications Industry Association/Electronic Industries Alliance (TIA/EIA) cdma2000 High Data Rate Air Interface Specification IS-856, January 2002 (стандарт IS-856).
В системе беспроводной связи, такой как система, построенная на основе CDMA или других указанных выше технологиях множественного доступа, пользователи часто являются мобильными. Во время движения пользователи могут перемещаться за пределы зоны обслуживания сектора базовой станции или за пределы зоны обслуживания самой базовой станции. Когда пользователь, часто называемый мобильным абонентом или мобильной станцией, входит в разные зоны обслуживания или выходит из них так, что при этом пользователь выходит из одной зоны обслуживания и входит в другую, для поддержания связи выполняют методику, известную как передача обслуживания. При передаче обслуживания мобильная станция начинает связываться с сектором базовой станции, для простоты называемой здесь базовой станцией, в зоне обслуживания, в которую входит абонент, и прекращает связь с базовой станцией в зоне обслуживания, которую он покидает. При использовании технологии, называемой «мягкой передачей обслуживания», во время передачи обслуживания мобильная станция одновременно находится на связи с двумя базовыми станциями. Другими словами, мобильный абонент сохраняет связь с базовой станцией, зону обслуживания которой мобильный абонент покидает, одновременно устанавливая связь с базовой станцией, в зону обслуживания которой он входит. При использовании такой технологии обе базовые станции совместно или независимо декодируют передачу мобильных станций. Связь с обеими базовыми станциями во время мягкой передачи обслуживания снижает шанс потери вызова или другого непреднамеренного разрыва соединения.
Скорость передачи данных, которая может поддерживаться каждой из двух базовых станций, участвующих в передаче обслуживания, может быть разной, например, из-за уровня перегрузки соответствующей базовой станции. Уровень перегрузки в системе может быть определен путем отслеживания скорости передачи данных пользователей и по силе сигнала, необходимого для получения требуемого качества обслуживания (QoS, КО). Канал связи от мобильного обслуживания к базовой станции называется обратным каналом связи или восходящим каналом связи. В беспроводной системе CDMA пропускная способность обратного канала связи ограничена уровнем взаимных помех, и одним из показателей степени перегрузки ячейки является суммарная принимаемая мощность над уровнем теплового шума базовой станции. Суммарная принимаемая мощность над уровнем теплового шума обычно называется "возвышением над тепловым шумом" (ROT, ВТШ) и соответствует нагрузке обратного канала связи. Как правило, требуется поддерживать ROT на уровне, близком к заданному значению. Если ROT будет слишком высоким, зона обслуживания ячейки, то есть расстояние, на котором можно поддерживать связь с базовой станцией ячейки, уменьшается, и обратный канал связи становится менее стабильным. Уменьшенная зона обслуживания (например, из-за излишне высокого значения ROT) может отрицательно повлиять на скорость передачи данных, которая может поддерживаться в ячейке, и в мобильных станциях, находящихся на границе ячейки, может произойти потеря вызова. Зона обслуживания ячейки уменьшается при высоком значении ROT из-за увеличения величины энергии, передаваемой в мобильные станции для обеспечения требуемого уровня энергии в базовой станции. Обычно мобильные абоненты в некоторой степени ограничены по уровню передаваемой энергии, которой они обладают, и, таким образом, требование увеличения мощности передачи соответствует уменьшению дальности действия. Низкое значение ROT может указывать на то, что обратный канал связи не сильно загружен, что указывает на то, что потенциально доступная возможность повышения скорости передачи данных не используется.
Если базовая станция и мобильный абонент, участвующие в передаче обслуживания, могут поддерживать разные скорости передачи данных, тогда скорость передачи данных мобильной станции во время передачи обслуживания может не быть оптимальной. Например, если базовая станция, в которую выполняют передачу мобильного обслуживания, может поддерживать более высокую скорость передачи данных, чем используется в данный момент мобильным абонентом, тогда мобильный абонент, возможно, работает на более низкой скорости передачи данных, чем возможно, и при этом может происходить недоиспользование системных ресурсов. Если базовая станция, в которую передают мобильного абонента, не может поддерживать такую же высокую скорость передачи данных, на которой работает мобильный абонент, тогда мобильный абонент может создавать увеличенный уровень помех для других пользователей и может ухудшить рабочие характеристики системы. Форма управления скоростью передачи данных в области мягкой передачи обслуживания может быть достигнута по согласованию между базовыми станциями. Однако согласование между базовыми станциями через инфраструктуру или канал непосредственной связи между базовыми станциями может выполняться медленно, или между двумя базовыми станциями может не быть обеспечена поддержка согласования.
Таким образом, в данной области техники существует потребность в улучшении управления скоростью передачи распространяемых данных во время передачи обслуживания в беспроводной системе связи.
Сущность изобретения
Раскрытые здесь варианты осуществления направлены на решение указанных выше проблем с помощью способа и устройства для управления скоростью передачи данных в системе беспроводной связи во время передачи обслуживания. Передачу мобильной станции принимают и декодируют множество базовых станций, находящихся в списке передачи обслуживания мобильной станции. Любая базовая станция в списке передачи обслуживания, которая успешно декодирует передачу сообщения, передает в мобильную станцию подтверждение о приеме информации по нисходящему каналу связи. Мобильная станция затем определяет команду управления скоростью передачи данных на основе сигналов, передаваемых из базовых станций, которые включают в себя сообщение подтверждения. Мобильная станция регулирует свою скорость передачи данных в соответствии с командой управления скоростью.
В другом аспекте базовой станции, которая не является той базовой станцией, которая передала сообщение подтверждения, может понадобиться передать в мобильную станцию команду на установление требуемой скорости передачи данных. Базовая станция, которая должна передать команду установления скорости передачи данных, может представлять собой первичную базовую станцию, которая имеет определенное качество обслуживания (QoS) и другую информацию планирования, или базовая станция может быть непервичной базовой станцией, которая сильно перегружена и для которой требуется уменьшить скорость передачи данных. Мобильная станция может затем использовать команду установления требуемой скорости передачи данных при определении скорости передачи данных на основе команд скорости передачи данных из первичной базовой станции и из непервичных базовых станций.
Управление скоростью передачи данных в системе беспроводной связи во время передачи обслуживания может включать в себя прием передаваемых сообщений от множества базовых станций, последующее определение множества команд управления скоростью передачи данных по соответствующим принятым сообщениям от множества базовых станций. Команды управления скоростью передачи данных затем могут быть скомбинированы, что позволяет отрегулировать скорость передачи данных в соответствии с скомбинированными командами управления скоростью. В случае автоматического повторения запроса (ARQ, АПЗ), неперегруженные базовые станции при передаче обслуживания могут декодировать передаваемые данные независимо и могут асинхронно передавать подтверждение (ACK). Асинхронная передача ACK приводит к проблемам синхронизации при передаче команды управления скоростью. Базовые станции, которые не подтверждают передачу ACK, могут не передавать команду управления скоростью, что можно интерпретировать как состояние HOLD удержания команды управления скоростью. Аспекты, касающиеся этого сценария, описаны, что эффективно обеспечивает возможности комбинирования команд управления скоростью при передаче обслуживания при получении ACK от множества нескоординированных базовых станций.
Комбинирование команд управления скоростью может включать в себя применение весовых коэффициентов к принятым командам управления скоростью. Например, команде управления скоростью первичной базовой станции может быть назначен больший весовой коэффициент, чем командам из непервичных базовых станций. Комбинирование команд скорости передачи данных также может включать в себя установление команды управления скоростью на основе требуемого качества обслуживания для первичной базовой станции так, чтобы первичная базовая станция управляла повышением скорости передачи данных и непервичные базовые станции обеспечивали бы управление скоростью передачи данных на основе степени загрузки системы.
Дополнительный аспект комбинирования команд управления скоростью передачи данных от множества базовых станций включает в себя уменьшение скорости передачи данных, если, по меньшей мере, одна из команд скорости передачи данных направлена на уменьшение скорости передачи данных. Другой аспект комбинирования команд управления скоростью передачи данных включает в себя поддержание скорости передачи данных, если ни одна из команд установления скорости передачи данных не указывает уменьшение скорости передачи данных и, по меньшей мере, одна из команд установления скорости передачи данных представляет собой команду поддержания скорости передачи данных, например, если команда установления скорости передачи данных представляет собой нулевую команду. Еще один аспект комбинирования команд управления скоростью передачи данных включает в себя поддержание скорости передачи данных, если ни одна из команд скорости передачи данных не направлена на уменьшение скорости передачи данных, увеличение скорости передачи данных или не представляет собой команду на поддержание скорости передачи данных, но вместо этого представляет собой другую команду, такую, как нулевая команда. Другой аспект комбинирования команд управления скоростью включает в себя увеличение скорости передачи данных, если ни одна из команд скорости передачи данных не направлена на уменьшение скорости передачи данных или не является командой на поддержание скорости передачи данных и, по меньшей мере, одна команда скорости передачи данных направлена на увеличение скорости передачи данных.
Другие свойства и преимущества настоящего изобретения будут понятны из следующего описания примерных вариантов осуществления, которые иллюстрируют аспекты изобретения на примере.
Краткое описание чертежей
На фиг.1 представлены участки системы 100 связи, построенной в соответствии с настоящим изобретением.
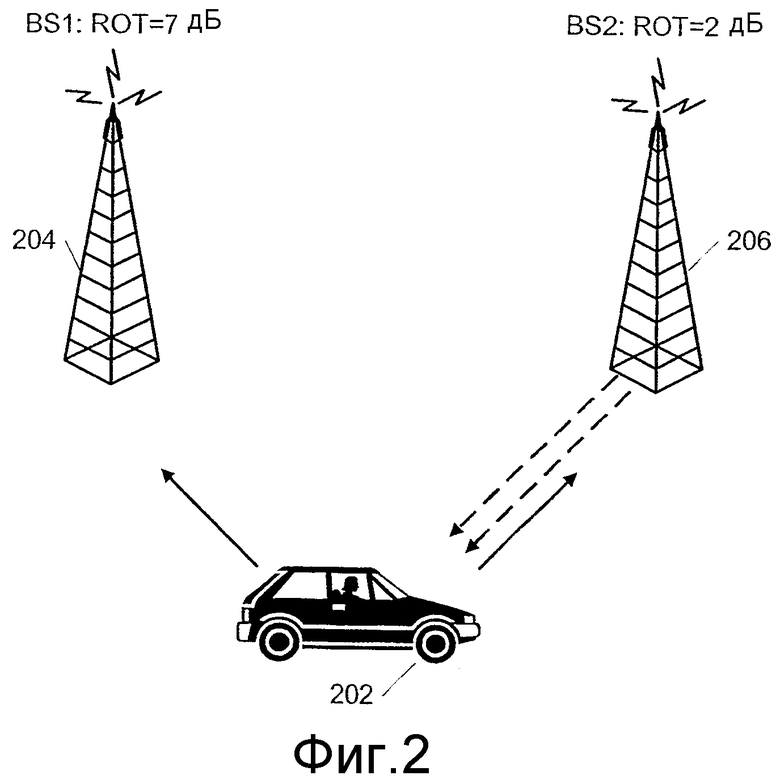
На фиг.2 показана блок-схема, иллюстрирующая устройство беспроводной связи во время передачи обслуживания между двумя базовыми станциями.
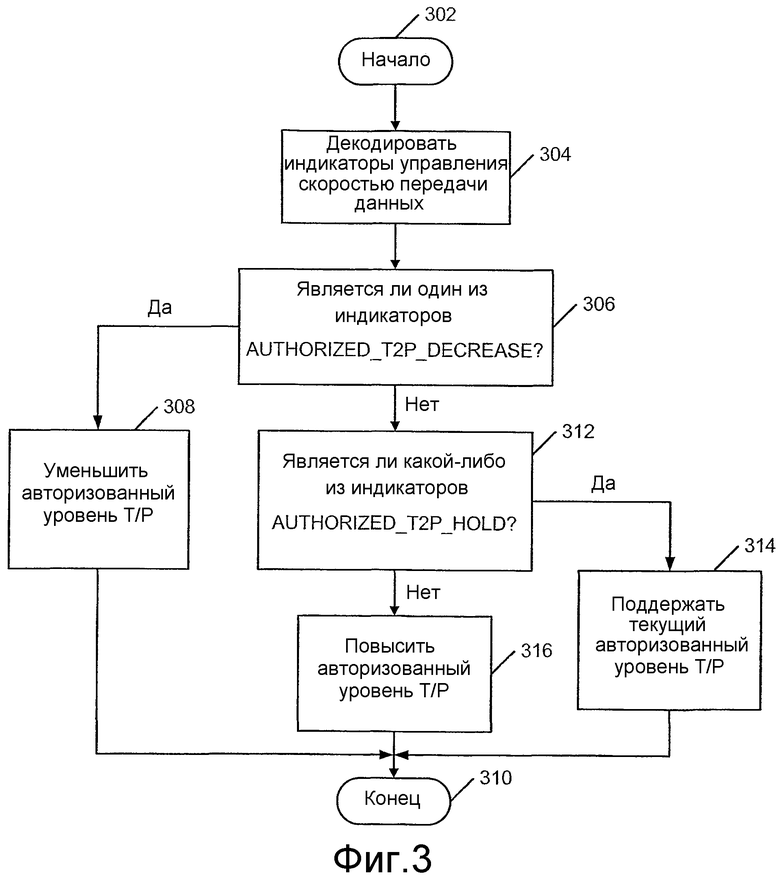
На фиг.3 показана схема последовательности операций, иллюстрирующая технологию комбинирования индикаторов управления скоростью передачи данных для общего/группового управления скоростью передачи данных.
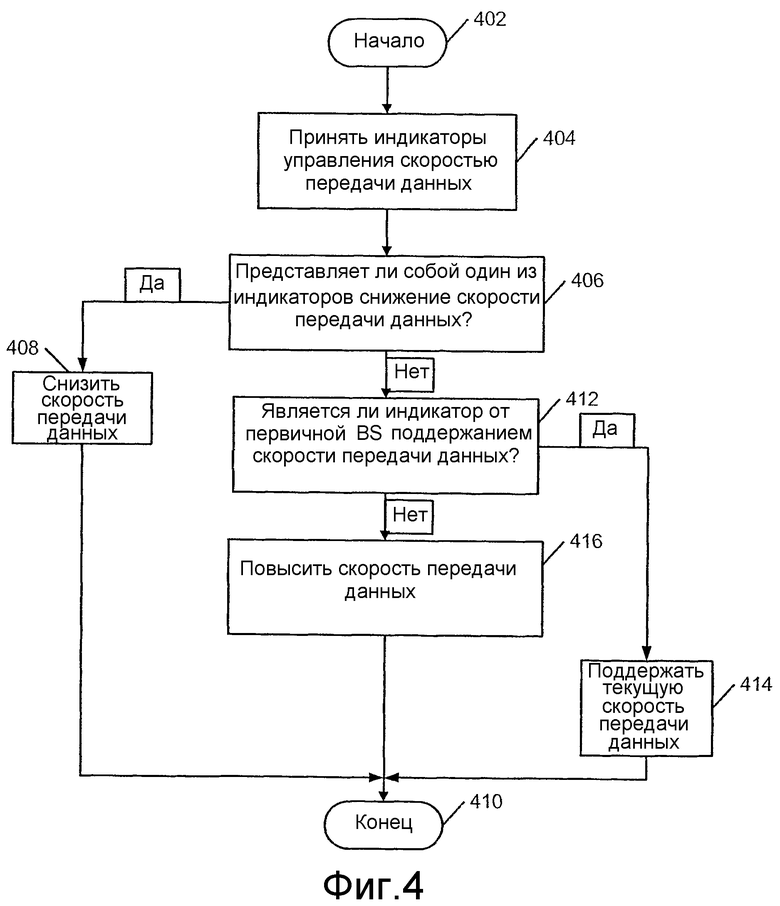
На фиг.4 показана схема последовательности операций, иллюстрирующая технологию комбинирования управления скоростью передачи данных для выделенного канала скорости передачи данных.
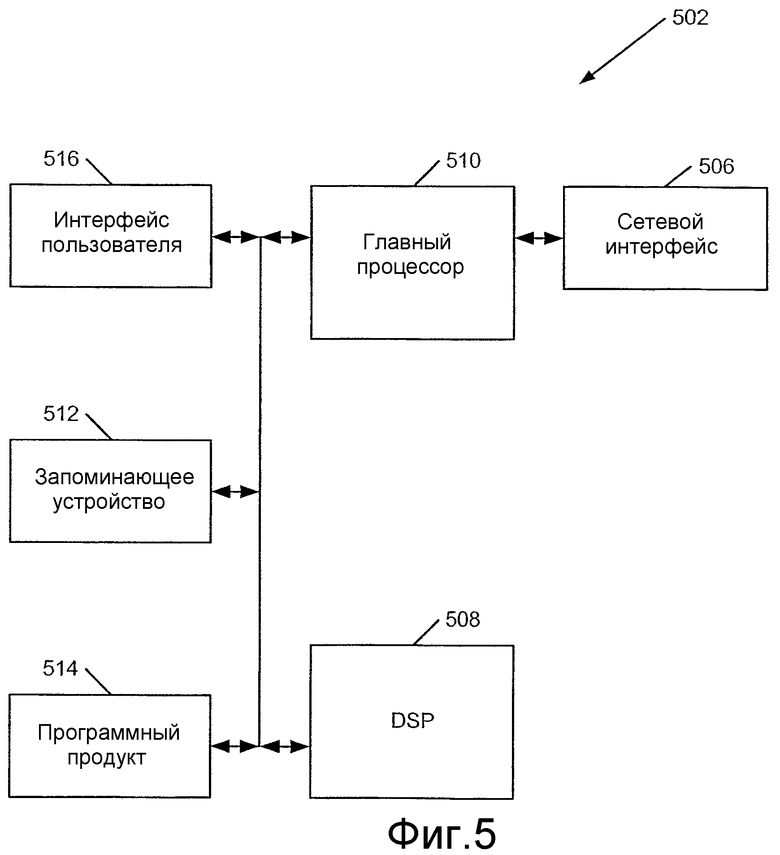
На фиг.5 показана блок-схема устройства беспроводной связи, построенного в соответствии с примерным вариантом осуществления настоящего изобретения.
Подробное описание изобретения
Слово "примерный", используемое здесь, подразумевает "служащий в качестве примера, случая или иллюстрации". Любой вариант осуществления, описанный здесь как "примерный", не обязательно следует рассматривать как предпочтительный или обладающим преимуществом над другими вариантами осуществления.
На фиг.1 показаны части системы 100 связи, построенной в соответствии с настоящим изобретением. Система 100 связи включает в себя инфраструктуру 101, множество беспроводных устройств связи (WCD) или мобильных станций (MS, МС) 104 и 105, и устройств 122 и 124 связи по наземной линии связи. В общем WCD могут быть либо мобильными или фиксированными, и термин "WCD" будет использоваться в качестве термина, заменяющего "MS" и "мобильный абонент", и наоборот.
Инфраструктура 101 включает в себя такие компоненты, как базовая станция 102, контроллеры 106 базовой станции, центры 108 мобильной коммутации, коммутируемую сеть 120, и т.п. В одном варианте осуществления базовая станция 102 интегрирована с контроллером 106 базовой станции, а в других вариантах осуществления базовая станция 102 и контроллер 106 базовой станции представляют собой отдельные компоненты. Разные типы коммутируемых сетей 120 можно использовать для направления сигналов в системе 100 связи, например коммутируемая сеть 120 может представлять собой коммутируемую телефонную сеть общего пользования (PSTN, КТОП).
Термин "прямой канал связи" обозначает путь сигнала от инфраструктуры 101 к WCD 104, 105, и термин "обратный канал связи" обозначает путь сигнала от WCD к инфраструктуре. Как показано на фиг.1, WCD 104 и 105 принимает сигналы 132 и 136 по прямому каналу связи и передает сигналы 134 и 138 по обратному каналу связи. В общем сигналы, переданные из WCD 104 и 105, предназначены для приема другим устройством связи, таким, как другой удаленный модуль, или устройство 122 и 124 наземной линии связи соответственно, и их направляют через коммутируемую сеть 120. Например, если сигнал 134, переданный из инициирующего WCD 104, предназначен для приема WCD 105 назначения, этот сигнал направляют через инфраструктуру и сигнал 136 передают по прямому каналу связи в WCD 105 назначения. Обычно устройство связи, такое как WCD, или устройство наземной линии связи может быть одновременно инициатором и назначением для сигналов.
Примеры WCD 104 включают в себя сотовые телефоны, персональные компьютеры с возможностью беспроводной связи и карманные персональные компьютеры (КПК) и другие беспроводные устройства. Система 100 связи может быть разработана так, что она будет поддерживать один или несколько стандартов беспроводной связи. Например, стандарты могут включать в себя такие стандарты, как TIA/EIA - 95-B (IS-95), TIA/EIA - 98-C (IS -98), cdma2000, Wideband (широкополосная) CDMA (WCDMA) и другие.
На фиг.2 показана блок-схема, иллюстрирующая WCD 202 во время передачи обслуживания между двумя базовыми станциями 204 и 206. Как показано на фиг.2, устройство 202 WCD связано с двумя базовыми станциями 204 и 206. На этой иллюстрации первичная базовая станция 204 (BS1) представляет собой базовую станцию, в зоне обслуживания которой в настоящее время находится WCD 202, и непервичная базовая станция 206 (BS2) представляет собой базовую станцию, в зону обслуживания которой входит WCD 202.
Проект партнерства третьего поколения 2 (3GPP2), который представляет собой проект сотрудничества по установке спецификаций для систем связи третьего поколения (3G), объединяющий интересы Северной Америки и Азии по разработке глобальных спецификаций для развития сети межсистемных операций в сотовых радиотелекоммуникациях ANSI/TIA/EIA-41 третьего поколения, получил предложения на разработку технологии управления скоростью передачи данных от одной или нескольких базовых станций во время передачи обслуживаний. В соответствии с этими предложениями базовая станция, управляющая WCD, передает специальную команду управления скоростью передачи (бит с тремя состояниями), которая может представлять одно из ВВЕРХ, УДЕРЖИВАТЬ или ВНИЗ (UP, HOLD или DOWN), что означает увеличение, удержание или уменьшение скорости или отношения трафика к пилот-сигналу при следующей передаче. Если WCD находится в состоянии мягкой передачи обслуживания, команды управления скоростью передачи могут быть приняты от разных базовых станций. Команды по управлению скоростью передачи из разных базовых станций могут быть скомбинированы для получения команды эффективного управления скоростью передачи данных. Недостаток такого подхода проявляется, когда базовая станция и WCD используют технологии, называемые гибридным автоматическим запросом на повторную передачу данных (HARQ, ГАЗМ), для улучшения рабочих характеристик системы. Когда разрешен режим HARQ, мобильная станция передает одну и ту же или другую кодированную копию того же пакета, пока базовая станция не подтвердит передачу пакета. Мобильная станция передает новый пакет с новой скоростью передачи данных, только когда она успешно передаст предыдущий пакет или передаст предыдущий пакет максимальное разрешенное количество раз. Мобильная станция успешно передает пакет, если она принимает подтверждение (ACK), по меньшей мере, от одной базовой станции из списка мягкой передачи обслуживания. Благодаря этому базовая станция в режиме мягкой передачи обслуживания передает команду управления скорость UP или DOWN, только когда она успешно декодировала пакет, и передает сообщение ACK по прямому каналу подтверждения (F-ACKCH, П-КПОДТВ) базовой станции. Команда HOLD соответствует отсутствию передачи по каналу управления скоростью и позволяет сэкономить энергию, когда базовая станция не ожидает новой передачи от мобильной станции. Поскольку качество передаваемого сообщения, принятого разными базовыми станциями, может быть разным, не все базовые станции из списка мягкой передачи обслуживания мобильных станций передают ACK в мобильный абонент одновременно. Подход специального управления скоростью передачи данных, который работает без HARQ, может быть повторно определен в системе, в которой одновременно используется как мягкая передача обслуживания между разными базовыми станциями, так и HARQ, для улучшения рабочих характеристик. В примере варианта осуществления WCD отслеживает прямые каналы управления скоростью (F-RCCH, П-КОУС) базовой станции, когда он принимает сообщение (ACK) подтверждения по прямому каналу подтверждения (F-ACKCH) от базовой станции. Проблема с таким подходом может возникнуть, если WCD 202 находится в состоянии мягкой передачи обслуживания с первичной базовой станцией 204 и непервичной базовой станцией 206, и WCD 202 принимает ACK только от непервичной базовой станции 206. Даже при том, что 204 является первичной базовой станцией и может принимать большую мощность взаимных помех от WCD 202, малозагруженная базовая станция 206 может декодировать передачи мобильной станции и передавать команду управления скоростью передачи вместе с ACK, которая просит, чтобы WCD 202 выполнил команду UP в отношении своей скорости передачи данных. Если это происходит, первичная базовая станция 204 может не иметь возможности управлять скоростью передачи данных WCD 202 с использованием команд управления скоростью.
Исключение из этого правила происходит после того, как будет передана последняя передача, соответствующая пакету данных, в это время WCD отслеживает все F-RCCH, которые назначены WCD, независимо от того, принимает ли WCD команду ACK от BS или нет. Однако эта схема очень чувствительна к ошибкам при передаче сигналов управления, включая ошибки обратного канала управления пакетными данными (R-PDCCH, О-КУПД) и ошибки прямого канала подтверждения (F-ACKCH). Например, R-PDCCH содержит информацию управления, обозначающую скорости переданных данных по каналу передачи данных/пакетов, и номер передачи пакета (также называемый номером подпакета). Номер подпакета обозначает, сколько раз пакет был передан, и его нельзя было успешно декодировать на базовой станции. Если номер подпакета равен максимальному количеству разрешенных передач, тогда текущая передача канала пакета представляет собой последнюю передачу для правильной доставки пакета в BS. Если BS не может декодировать передачу R-PDCCH от WCD, тогда BS не будет иметь информации о том, что подпакет представляет собой последний подпакет и что MS следует передать индикатор управления скоростью. MS будет интерпретировать отсутствие передачи по каналу F-RCCH как команду HOLD (удержание). Команда HOLD не позволяет WCD повышать скорость передачи данных, даже при том что BS не имела намерения передать команду HOLD, и может поддерживать трафик с более высокой скоростью передачи данных.
В другом варианте осуществления мобильная станция отслеживает команду управления скоростью передачи данных только от первичной базовой станции. При таком подходе непервичные базовые станции могут принимать взаимную помеху от мобильной станции, и не имеют возможности управлять мобильной станцией. Кроме того, мобильная станция перемещается, при этом она может входить в зону обслуживания другой базовой станции и может производить переключение между ячейками. Во время переключения между ячейками MS связывается с первичной BS1 204, передавая заданное количество фреймов переключения, обозначающих, что непервичная BS2 206 станет первичной базовой станцией. Переключение между базовыми станциями закачивается, когда MS принимает индикатор окончания переключения из старой первичной BS1 204 или когда будет отправлено заданное количество фреймов переключения. Операция управления скоростью передачи данных от первичной базовой станции явно не определена во время интервала переключения. Ниже приведено описание некоторых разных методик, которые можно использовать во время мягкой передачи обслуживания и переключения между ячейками, в которых представлены различные проблемы, вместе со способами решения этих проблем.
Случай 1
В этом варианте осуществления мобильная станция (MS) принимает сообщение подтверждения (ACK), переданное базовой станцией (BS), если декодированное переданное сообщение соответствует пакету, который не был передан максимальное разрешенное количество раз. Когда MS принимает ACK, она регулирует свою скорость передачи данных в соответствии с битом (битами) управления скоростью, переданным из BS, которая подтверждает передачу. Биты управления скоростью, принятые мобильной станцией из базовых станций, которые не передали ACK, игнорируются. Мобильная станция отслеживает бит управления скоростью от всех базовых станций, только когда предыдущая передача соответствует пакету, который был передан максимальное разрешенное количество раз.
Такой подход обладает рядом преимуществ. Одно из них состоит в том, что предыдущая передача не является последней передачей пакета, базовая станция может принять решение о скорости передачи данных для следующей передачи, только если она подтверждает предыдущую передачу сообщением ACK и ожидает новую передачу. Кроме того, когда базовая станция не подтверждает предыдущую передачу от мобильной станции сообщением ACK, она не может передать любую из команд управления скоростью передачи данных, что обеспечивает, таким образом, эффективное использование мощности и уверенность в том, что биты управления скоростью будут игнорироваться и не будут интерпретироваться как команда HOLD (удержание) мобильной станцией. Другое преимущество состоит в том, что при такой технологии как с первичной, так и с непервичной базовыми станциями осуществляется одинаковое взаимодействие. Поэтому даже когда первичная базовая станция меняется во время переключения между ячейками, не оказывается влияние на операцию управления скоростью из базовых станций во время мягкой передачи обслуживания.
При использовании такой методики может возникнуть проблема, если существуют несбалансированные нагрузки между базовыми станциями, участвующими в передаче обслуживания. Например, проблема может возникнуть, если, например, MS 202 выполняет мягкую передачу обслуживания от первичной станции BS 204 к непервичной BS 206 и первичная BS 204 полностью загружена по обратному каналу связи с превышением над тепловым уровнем (ROT) 7 дБ, в то время как непервичная BS 206 имеет относительно мало загруженный обратный канал связи, например ROT 2 дБ. В таком примере несбалансированности нагрузки MS 202 может иметь лучший обратный канал связи с непервичной BS 204, поскольку при передаче сигнала от MS 202 на него воздействует меньше взаимных помех. С другой стороны, обратный канал связи с первичной BS 204 может быть слабым, даже при том, что первичная BS 204 может иметь лучший прямой канал связи c MS 202. В таком сценарии непервичная BS 206 может декодировать пакет данных MS 202 и передавать сообщение подтверждения ACK в MS 202. Поскольку непервичная BS 206 мало загружена, она может передавать в MS бит (биты) управления скоростью передачи данных для повышения скорости передачи данных. Первичная BS 204, с другой стороны, может быть полностью загруженной или перегруженной, и если она принимает передачу от MS 202 с малым значением сигнал/шум, она может не иметь возможности декодировать эту передачу и передать подтверждение ACK. Если первичная BS 204 не декодирует передачу от MS 202, она не передает команду управления скоростью передачи данных в MS 202, теряя, таким образом, управление над передачей MS 202, даже при том, что она принимает больше помех от MS 202. Если MS 202 регулирует свою скорость передачи данных в соответствии с битом (битами) управления скоростью, передаваемым малозагруженной BS 206, и повышает свою скорость передачи данных, это может привести к перегрузке первичной BS 204, которая принимает все больше помех от MS 202, над которыми она не имеет возможности осуществлять адекватное управление. Одно из решений такой проблемы состоит в том, чтобы BS 204 декодировала пакеты, передаваемые MS 202 по обратному каналу управления пакетными данными (R-PDCCH), и проверяла скорость передачи данных. Если скорость передачи данных MS 202 будет выше, чем требуется первичной BS 204, BS 204 может управлять скоростью передачи данных MS 202, передавая запрос в непервичную BS 206 отправить в MS бит (биты) RC (УС, управления скоростью) для уменьшения скорости передачи данных MS. Первичная BS может передавать запрос в непервичную BS непосредственно, или через инфраструктуру системы передачи данных или канал непосредственной связи между базовыми станциями, или используя другие способы, соответствующие конфигурации системы.
Другая проблема при использовании такой методики (передача подтверждения ACK от BS в MS) состоит в том, что как первичная BS 204, так и непервичная BS 206 должны знать требования QoS к мобильной станции. В большинстве сценариев непервичная BS 206, которая декодирует передачи MS только в редких случаях, не имеет точную информацию о QoS и текущие требования MS 202. В отсутствие требований к QoS MS 202 непервичная BS 206 не будет иметь возможности передать соответствующую команду управления скоростью передачи данных в MS, пока первичная и непервичная BS не согласуют эту информацию через канал непосредственной связи между базовыми станциями для обмена этой информацией.
Случай II
Во втором варианте осуществления MS 202 регулирует свою скорость передачи данных в соответствии с битом (битами) RC только от первичной BS 204. Другими словами, MS 202 регулирует свою скорость передачи данных в соответствии с битом (битами) управления скоростью, передаваемыми BS 204, которая в настоящее время обозначена как первичная BS, даже если подтверждение ACK будет принято от непервичной BS 206. Такая методика имеет преимущество, состоящее в том, что, если первичной BS не требуется изменить скорость передачи данных, она не будет передавать бит (биты) управления скоростью, что MS считает командой HOLD (удержания), и экономит энергию в прямом канале связи (FL, ПК) BS. Таким образом, даже если непервичная BS 206 передает подтверждение ACK в MS, непервичная BS 206 не передает бит (биты) управления скоростью в MS. Если первичная BS 204 перегружена, она может передать бит (биты) управления скоростью DOWN (снизить), и MS регулирует свою скорость передачи данных соответствующим образом, даже если непервичная BS передает подтверждение ACK. В соответствии с этим вариантом осуществления только первичная BS 204 должна содержать информацию о QoS и обновлять текущие требования к мобильной станции.
Проблема при использовании такой методики состоит в том, что непервичная BS 206 не имеет возможности управления мощностью, которую она принимает при передаче MS и которая действует как помеха при приеме передач других MS. В случае несбалансированности потерь при распространении между прямым каналом связи и обратным каналом связи непервичная BS принимает неконтролируемую мощность от MS. В соответствии с вариантом осуществления эта проблема может быть решена, только когда непервичная BS 206 запрашивает первичную BS 204 передать команду управления скоростью DOWN. Непервичная BS может передать запрос в первичную BS непосредственно, или через инфраструктуру системы связи или канал непосредственной связи между базовыми станциями, или с использованием других способов, соответствующих конфигурации системы.
При таком подходе к управлению скоростью алгоритм управления скоростью передачи данных не полностью определен в среде мобильной связи, когда MS 202 выполняет функцию переключения между ячейками. Перед переключением между ячейками BS 204 представляет собой первичную BS, в то время как BS 206 представляется собой непервичную BS. Из-за движения мобильного обслуживания, принимаемый сигнал непервичной BS 206 может стать более сильным, чем сигнал первичной BS 204. Поэтому во время переключения между ячейками MS 202 передает фреймы переключения, обозначающие 206, как ее новую первичную BS. Перед тем как фреймы переключения будут декодированы базовой станцией, BS 204 считает себя первичной BS для MS 202. Проблема возникает, поскольку MS 202 не знает, когда начать считать BS 206 своей новой первичной BS и начинать воспринимать бит RS от BS 206. Эта проблема может быть решена, когда MS 202 воспринимает команды управления скоростью обеих, первичной и непервичной BS во время переключения между ячейками и использует правило OR-of-HOLD (ИЛИ-УДЕРЖАНИЕ), в соответствии с которым MS будет удерживать свою скорость передачи данных, если любая из BS передает команду HOLD, после чего используется правило OR-of-DOWN (ИЛИ-СНИЗИТЬ), когда MS уменьшает свою скорость передачи данных, если любая из BS передает команду уменьшения скорости передачи данных. Такой подход обеспечивает для двух BS большую возможность управления передачей MS 202. В еще одном варианте осуществления, в котором решается эта проблема, MS 202 воспринимает команду управления скоростью передачи данных только от предыдущей первичной BS 204 во время периода переключения. Только когда последний индикатор переключения будет передан или MS 202 принимает подтверждение на переключение, она начинает воспринимать команду управления скоростью от BS 206, новой первичной BS. BS 206 начинает передавать команду управления скоростью, когда она декодирует индикатор переключения. В течение периода от момента, когда индикатор переключения будет декодирован BS, до момента, когда MS принимает подтверждение, MS 202 воспринимает бит (биты) управления скоростью от BS 204, в то время как BS 206 передает бит (биты) управления скоростью. Поскольку отсутствие передачи управления скоростью в прямом канале управления скоростью (F-RCCH) из BS 204 будет интерпретироваться MS 202 как сообщение HOLD, ни одна из базовых станций не будет иметь возможности изменить скорость передачи данных MS 202 в течение этого промежуточного периода.
Случай III
При использовании этой методики все сектора ячеек в активном наборе MS участвуют в управлении скоростью передачи данных MS. Это управление считается симметричным с активными членами набора MS, управляющими повышением скорости MS с применением правила OR-of-DOWN, после которого следует правило OR-of-HOLD. Такая методика имеет преимущество, состоящее в том, что все BS, связывающиеся с MS, будут участвовать в управлении скоростью передачи данных при передаче MS и, таким образом, любая отдельная MS в меньшей степени влияет на ROT базовой станции, и обеспечивается большая возможность управления ею. Эта методика работает аналогично как при мягкой передаче обслуживания, так и при переключении между ячейками.
Однако при использовании такой методики возникает множество проблем, в частности, в сценариях, когда множество базовых станций при мягкой передаче обслуживания не распложены близко друг к другу, и решения по декодированию каждой из них не известны другим базовым станциям в тот момент времени, когда каждая из BS принимает свое решение по управлению скоростью передачи данных. Например, в системе с гибридным автоматическим запросом на повторную передачу данных (HARQ) MS не передает новый пакет до тех пор, пока она не примет подтверждение ACK от одной из базовых станций при мягкой передаче обслуживания, или до тех пор, пока MS не передаст пакет максимальное разрешенное количество раз. Поэтому когда предыдущая передача не является последней передачей пакета, базовая станция не знает, может ли она планировать для MS новую передачу до тех пор, пока она не декодирует предыдущую передачу и не передаст подтверждение ACK в мобильную станцию. В отсутствие этой информации BS, которая не передает подтверждение предыдущих передач в мобильные станции, может передать команду HOLD для экономии энергии в прямом канале связи. Однако в соответствии с правилом OR-of-HOLD MS не будет иметь возможности увеличить свою скорость передачи данных до тех пор, пока она не получит подтверждение ACK от всех базовых станций одновременно. Для решения этой проблемы базовая станция, которая не передает в MS подтверждение ACK, должна все время передавать команду управления скоростью UP (повысить). Это включает в себя моменты времени, когда MS ничего не передает по своему обратному пакетному каналу, поскольку базовая станция может не иметь возможности отличить отсутствие передачи от недекодированной передачи. Такой подход в чрезвычайной степени не эффективен по использованию энергии, поскольку каждая BS впустую расходует энергию по прямому каналу связи при постоянной передаче команды управления скоростью UP, пока базовая станция не передаст в мобильную станцию подтверждение ACK.
Случай IV
В этом варианте осуществления всеми секторами ячейки в активном наборе MS управляют с повышением скорости передачи MS с использованием правила OR-of-DOWN, после которого следует правило OR-of-HOLD аналогично Случаю III. Однако в отличие от Случая III управление при этом асимметрично, поскольку первичная BS предоставляет фундаментальное регулирование повышением скорости передачи данных MS, в то время как непервичные BS обеспечивают управление перегрузкой. Другими словами, первичный сектор передает в MS команду управления скоростью с тремя состояниями (-1, 0, +1) на основе требуемого QoS, где отсутствие передачи (0) бита управления скоростью в канале управления скоростью соответствует команде HOLD. Непервичная BS передает бит управления скоростью ON-OFF (-1, 0), где отсутствие передачи (0) соответствует команде UP или не имеет значения, в то время как состояние ON соответствует команде DOWN. Непервичная BS может передавать команду управления скоростью на основе уровня перегрузки соответствующей непервичной BS. Непервичная BS передает в MS команду управления скоростью UP, если непервичная BS не перегружена, и команду управления скоростью DOWN, если непервичная BS перегружена. Например, непервичная BS может передавать команду управления скоростью UP, если ее ROT обозначает низкий уровень перегрузки, и команду управления скоростью DOWN, если ее ROT обозначает высокий уровень перегрузки. В данном варианте осуществления бит управления скоростью от BS 206 может быть общим для всех мобильных станций 202, для которых BS 206 не является первичной.
Следует отметить, что описанный выше подход позволяет расходовать очень малое количество энергии по прямому каналу связи непервичных базовых станций, поскольку команда UP соответствует отсутствию передачи бита управления скоростью. Команда DOWN от непервичной BS может быть передана, только если система сильно перегружена, обеспечивая, таким образом, некоторое управление для непервичных базовых станций, что указано как недостаток для случая II. Например, если будет определено, что ROT сектора превышает заданную величину, например, 7 или 8 дБ, тогда непервичная BS считается перегруженной, и она передает команду -1 управления скоростью, что представляет команду управления скоростью DOWN. В противном случае непервичная BS считается неперегруженной и передают команду управления скоростью, равную 0, что представляет команду UP. Поскольку менее вероятно, что система будет перегружена в течение длительного периода времени, команду DOWN передают достаточно редко. Для большей части времени в данном варианте осуществления не перегруженная BS будет передавать команду скорости передачи данных, представляющую собой 0, что соответствует отсутствию передачи команды. Поскольку неперегруженная BS не передает команду управления скоростью, при такой методике поэтому не будет потребляться слишком много энергии из непервичного сектора.
Поскольку такой подход является асимметричным, управление скоростью передачи при мягкой передаче обслуживания должно быть обязательно указано, как при переключении между ячейками в случае II. Во время переключения между ячейками можно использовать более консервативный подход. В варианте осуществления MS декодирует бит (биты) управления скоростью передачи данных как от первичной BS 204 (базовая станция, зону обслуживания которой MS покидает), так и непервичной BS 206 (базовая станция, в зону обслуживания которой входит MS), как величину с тремя состояниями -1, 0 или 1, представляющими DOWN, HOLD, UP соответственно. Операция переключения между ячейками начинается, когда MS передает сигнал CELL_SWITCH_INDICATOR (индикатор переключения между ячейками), который обозначает BS 206, как ее новую первичную BS. Во время периода от начала операции переключения до тех пор, когда MS не примет END_SWITCH_INDICATOR (индикатор окончания переключения) (подтверждение от базовой станции, обозначающее, что операция переключения завершена), или не будут переданы индикаторы NUM_SOFT_SWITCHING_FRAMES (количество фреймов мягкого переключения), MS использует одну и ту же логику для интерпретирования бита (битов) управления скоростью от обеих станций BS 204 и BS 206. В течение этого периода MS применяет правило OR-of-HOLD, после чего следует правило OR-of-DOWN в отношении команд управления скоростью от BS 204 и BS 206. Во время периода переключения MS 202 не имеет возможности увеличивать скорость, даже если новая первичная BS 206 передает команду UP в соответствии с правилом OR-of-HOLD. Таким образом, этот подход является консервативным в течение периода переключения.
В еще одном варианте осуществления во время периода переключения MS 202 интерпретирует команду управления скоростью от BS 204 как команду с тремя состояниями (-1, 0, 1), в то время как она интерпретирует команду управления скоростью от BS 206 как команду ON-OFF (-1, 0) (включить-выключить). После того как MS 202 примет END_SWICH_INDICATOR, который обозначает BS 206, как ее новую первичную BS, или передаст NUM_SOFT_SWITCHING_FRAMES, которые обозначают переключение, MS начинает интерпретировать команду управления скоростью от BS 204 как ON-OFF, и команды управления скоростью от BS 206 как команды с тремя состояниями. Этот подход является более агрессивным, чем описанная ранее технология, поскольку он позволяет BS 204 увеличивать скорость передачи данных MS 202 до тех пор, пока она не декодирует CELL_SWITCH_INDICATOR. В течение периода, пока выполняется декодирование CELL_SWITCH_INDICATOR с помощью BS, до момента времени, когда MS примет END_SWITCH_INDICATOR, MS 202 не может увеличивать скорость передачи данных, даже если новая первичная BS 206 передает команду UP, поскольку команда управления скоростью от предыдущей первичной BS 204 будет интерпретирована MS как команда HOLD.
Методики комбинирования множества индикаторов управления скоростью
Обобщенная методика комбинирования множества индикаторов управления скоростью включает в себя применение весовых коэффициентов к разным принятым командам управления скоростью. Например, первичной базовой станции может быть назначен больший весовой коэффициент, чем непервичной базовой станции в активном наборе MS. Индикаторы команды взвешенной скорости могут затем быть скомбинированы для получения совокупной команды скорости, которую используют для управления скоростью передачи данных от MS. Как описано выше, Случай III соответствует случаю, когда равные весовые коэффициенты применяют для команд управления скоростью, принимаемых от всех базовых станций из активного набора мобильных станций. Случай IV представляет собой специальный случай взвешивания приложенный к командам управления скоростью, где весовой коэффициент 0 применяют для команды HOLD от непервичной BS. Разные специальные случаи технологии взвешивания для интерпретирования и комбинирования индикаторов управления скоростью передачи данных MS, принятых из членов ее активного набора, описаны ниже.
Правила комбинирования управления скоростью передачи данных для общего/в группе управления скоростью
Если MS принимает сообщение подтверждения ACK или после ее последнего подпакета, MS декодирует индикаторы управления скоростью из всех F-RCCH, которые были назначены MS членам активного набора MS. Каждый индикатор управления скоростью имеет три состояния: DOWN, HOLD и UP. Эффект команд управления скоростью состоит в изменении авторизованного T/P (Т/П, отношение трафика к пилот-сигналу) на определенную величину, где авторизованное T/P представляет собой максимально разрешенное значение отношения "трафика к пилот-сигналу", разрешенное для мобильной станции при передаче, и используется как индикатор скорости передачи данных MS, которую она может поддерживать. В одном варианте осуществления MS комбинирует все индикаторы управления скоростью, которые она принимает на основе следующих правил OR-of-DOWN:
Если любой индикатор представляет собой DOWN, тогда MS уменьшает свое авторизованное отношение T/P на определенную величину от текущего уровня.
Если отсутствует индикатор DOWN и, по меньшей мере, один из индикаторов представляет собой HOLD, тогда MS поддерживает текущий авторизованный уровень отношения T/P.
В противном случае все индикаторы представляют собой UP, и MS увеличивает свое авторизованное отношение T/P на заданную величину от текущего уровня.
Было отмечено, что заданная величина, на которую MS увеличивает или уменьшает свое текущее авторизованное отношение T/P, может быть одинаковой или может быть разной в зависимости от текущего авторизованного отношения T/P MS.
Правила комбинирования управления скоростью для специального управления скоростью
Для специального управления скоростью, если MS принимает от BS подтверждение ACK по каналу F-ACKCH, она декодирует все F-RCCH, которые назначены для MS, независимо от того, принимает ли MS подтверждение ACK от BS или нет. Надежность системы связи, в которой используется такая процедура приема, может быть улучшена при использовании следующих методик взвешивания.
Индикатор управления скоростью от первичной BS имеет три состояния: RATE_DECREASE, RATE_HOLD и RATE_INCREASE (снизить скорость, удерживать скорость и повысить скорость).
Индикатор управления скоростью от непервичной BS имеет два состояния: RATE_DECREASE и RATE_HOLD. Это можно интерпретировать как методику весовых коэффициентов, когда индикатору состояния управления скоростью RATE_HOLD и RATE_INCREASE от непервичной BS присваивают весовой коэффициент НУЛЬ.
MS комбинирует требуемые индикаторы управления скоростью на основе следующих правил:
Если любой индикатор представляет собой RATE_DECREASE, тогда MS уменьшает свою скорость на требуемую величину, например на единицу.
Если ни один из индикаторов не является RATE_DECREASE и, по меньшей мере, один индикатор представляет собой RATE_HOLD, тогда MS поддерживает текущее состояние.
Если ни один из индикаторов не является RATE_DECREASE или RATE_HOLD и, по меньшей мере, один индикатор представляет собой RATE_INCREASE, тогда MS увеличивает свою скорость на требуемую величину, например на единицу.
В противном случае все индикаторы управления скоростью представляют собой RATE_HOLD и MS поддерживает текущую скорость передачи данных.
Следует отметить, что MS комбинирует требуемые индикаторы управления скоростью, которые могут включать в себя индикаторы управления скоростью всех членов активного набора MS или включают в себя индикаторы управления скоростью только некоторых членов активного набора MS.
Процедура, выполняемая во время переключения между ячейками для специального управления скоростью:
После того как MS инициирует операцию переключения между ячейками, посылая CELL_SWITCH_INDICATOR, MS предполагает, что каждый индикатор управления скоростью как от старой первичной BS, так и от новой первичной BS имеет три состояния: RATE_DECREASE, RATE_HOLD и RATE_INCREASE. Индикаторы управления скоростью от всех других непервичных BS остаются неизменными и имеют два состояния: RATE_DECREASE и NULL_INDICATION. Индикаторы управления скоростью комбинируют с использованием тех же правил комбинирования, которые были описаны выше.
После приема END_SWITCH_INDICATOR или после передачи NUM_SOFT_SWITCHING_FRAMES MS предполагает, что индикатор управления скоростью от новой первичной BS имеет три состояния: RATE_DECREASE, RATE_HOLD и RATE_INCREASE. Индикаторы управления скоростью от всей других непервичных BS, включая старую первичную BS, имеют два состояния: RATE_DECREASE и NULL_INDICATION. Индикаторы управления скоростью комбинируют на основе тех же правил комбинирования, которые были описаны выше.
Альтернативный подход состоит в определении состояний F-RCCH от непервичной BS, "в процессе работы", на основе того, что принято по соответствующему F-ACKCH от ассоциированной BS. Для этого подхода используется следующая процедура.
Если подтверждение ACK принимают из F-ACKCH, тогда MS интерпретирует, что соответствующий F-RCCH той же непервичной BS имеет три состояния: RATE_DECREASE, RATE_HOLD и RATE_INCREASE.
Если подтверждение ACK не было принято от F-ACKCH (после последнего подпакета), тогда MS интерпретирует, что соответствующий F-RCCH той же непервичной BS имеет два состояния: RATE_DECREASE и NULL_INIDICATION.
Все другие правила комбинирования остаются теми же, как описано выше.
На фиг.3 показана схема последовательности операций, иллюстрирующая методику комбинирования индикаторов управления скоростью для общего/группового управления скоростью. В схеме общего/группового управления скоростью передают одну команду управления скоростью, которую отслеживают все мобильные станции или группа мобильных станций в зоне обслуживания базовой станции. Последовательность операций начинается в блоке 302. В блоке 304 MS декодирует индикаторы управления скоростью, принятые от членов активного набора MS для BS. В блоке 306 MS определяет, является ли один из индикаторов управления скоростью AUTHORIZED_T2P_DECREASE (команда управления скоростью DOWN). Если, по меньшей мере, один из индикаторов представляет собой AUTHORIZED_T2P_DECREASE, получают выходной результат "ДА", тогда последовательность операций продолжается в блоке 308. В блоке 308 MS уменьшает свой авторизованный уровень T/P (отношение трафика к пилот-сигналу) на заданную величину. Последовательность операций затем продолжается в блоке 310, где процесс комбинирования заканчивается.
Возвращаясь к блоку 306, если ни один из индикаторов не является AUTHORIZED_T2P_DECREASE, то есть результат "НЕТ", тогда последовательность операций продолжается в блоке 312. В блоке 312 MS определяет, является ли один из индикаторов управления скоростью AUTHORIZED_T2P_HOLD (команда управления скоростью HOLD). Если, по меньшей мере, один из индикаторов представляет собой AUTHORIZED_T2P_HOLD, результат "ДА", тогда последовательность операций продолжается в блоке 314. В блоке 314 MS поддерживает свой текущий авторизованный уровень T/P. Последовательность операций затем продолжается в блоке 310, где процесс заканчивается.
Возвращаясь к блоку 312, если ни один из индикаторов не является AUTHORIZED_T2P_HOLD, результат "НЕТ", тогда все индикаторы должны быть AUTHORIZED_T2P_INCREASE (команда управления скоростью UP), поскольку индикаторы могут представлять собой только одно из трех значений AUTHORIZED_T2P_DECREASE, AUTHORIZED_T2P_HOLD или AUTHORIZED_T2P_INCREASE. Поэтому в блоке 312, если ни один из индикаторов не является AUTHORIZED_T2P_HOLD, последовательность операций продолжается в блоке 316. В блоке 316 MS увеличивает свое авторизованное отношение T/P на заданную величину. Последовательность операций затем продолжается в блоке 310, где процесс заканчивается.
На фиг.4 показана схема последовательности операций, иллюстрирующая методику комбинирования управления скоростью для подхода со специальным управлением скоростью. В подходе со специальным управлением скоростью отдельную команду управления скоростью, специфичную для каждой мобильной станции, передают для всех MS. Последовательность операций начинается в блоке 402. В блоке 404 MS декодирует индикаторы управления скоростью, принятые от первичной и непервичной BS. Индикатор управления скоростью от первичной BS может представлять собой RATE_DECREASE, RATE_HOLD или RATE_INCREASE. Индикатор управления скоростью от непервичной BS может быть RATE_DECREASE или NULL_INDICATION. Последовательность операций продолжается в блоке 406. В блоке 406 MS определяет, является ли один из индикаторов управления скоростью RATE_DECREASE. Если, по меньшей мере, один из индикаторов представляет собой RATE_DECREASE, результат "ДА" исходит из блока 406, тогда последовательность операций продолжается в блоке 408. В блоке 408 MS уменьшает свою скорость передачи данных. Например, MS может уменьшить свою скорость передачи данных на величину, равную единице. Последовательность обработки затем продолжается в блоке 410, где процесс комбинирования заканчивается.
Возвращаясь в блок 406, если ни один из индикаторов не является RATE_DECREASE, результат "НЕТ" исходит из блока 406, тогда последовательность операций продолжается в блоке 412. В блоке 412 MS определяют, представляет ли индикатор управления скоростью от первичной BS RATE_HOLD. Если, по меньшей мере, один из индикаторов представляет собой RATE_HOLD, тогда последовательность операций продолжается в блоке 414. В блоке 414 MS поддерживает свою текущую скорость передачи данных. Последовательность операций затем продолжается в блоке 410, где процесс заканчивается.
Возвращаясь в блок 412, если ни один из индикаторов не является RATE_HOLD, выводится результат "НЕТ", тогда последовательность операций продолжается в блоке 416. В блоке 416, поскольку ни один из индикаторов не представляет собой RATE_DECREASE и индикатор от первичной BS не является RATE_HOLD, MS увеличивает свою скорость передачи данных. Последовательность операций затем продолжается в блоке 410, где процесс заканчивается.
На фиг.5 показана блок-схема устройства беспроводной связи, построенного в соответствии с примерным вариантом осуществления настоящего изобретения. Устройство 502 связи включает в себя сетевой интерфейс 506, цифровой сигнальный процессор 508 (DSP, ЦПС), главный процессор 510, запоминающее устройство 512, программный продукт 514 и интерфейс 516 пользователя.
Сигналы из инфраструктуры принимают с помощью сетевого интерфейса 506 и передают в главный процессор 510. Главный процессор 510 принимает эти сигналы и в зависимости от содержания сигнала отвечает соответствующими действиями. Например, главный процессор 510 может определить скорость передачи данных в соответствии с самими принятыми сигналами, или он может направить принимаемые сигналы в DSP 508 для определения скорости передачи данных.
В одном варианте осуществления сетевой интерфейс 506 может представлять собой приемопередатчик и антенну, предназначенные для формирования интерфейса с инфраструктурой через беспроводный канал. В другом варианте осуществления сетевой интерфейс 506 может представлять собой карту сетевого интерфейса, используемую для создания интерфейса с инфраструктурой по наземным линиям связи.
Как главный процессор 510, так и DSP 508 соединены с запоминающим устройством 512. Запоминающее устройство 512 можно использовать для сохранения данных во время осуществления операции WCD, а также для сохранения программного кода, который выполняется главным процессором 510 или DSP 508. Например, главный процессор, DSP или оба они могут работать под управлением программных инструкций, которые временно сохраняют в запоминающем устройстве 512. Главный процессор и DSP также могут включать в себя свое собственное запоминающее устройство для записи программ. Когда выполняют программные инструкции, главный процессор 510 или DSP 508, или оба они выполняют свои функции, например сжатие или декомпрессию пакетов данных. Таким образом, на этапах программирования выполняют функции соответствующего главного процессора или ЦПУ и DSP так, что каждый из главного процессора и DSP может выполнять функции определения скорости передачи данных, если это требуется. Этапы программирования могут быть получены из программного продукта 514. Программный продукт 514 может сохранять и передавать этапы программирования в запоминающее устройство 512 для их осуществления главным процессором, ЦПУ или обоими.
Программный продукт 514 может представлять собой микросхемы полупроводниковой памяти, такие как ОЗУ, запоминающее устройство типа флэш, ПЗУ, запоминающее устройство EPROM (СППЗУ, стираемое программируемое постоянное запоминающее устройство), запоминающее устройство EEPROM (ЭСППЗУ, электрически стираемое программируемое постоянное запоминающее устройство), регистры, а также другие устройства сохранения данных, такие как жесткий диск, съемный диск, CD-ROM, накопитель DVD или накопитель данных другой формы, известный в данной области техники, на котором можно сохранять инструкции, считываемые компьютером. Кроме того, программный продукт 514 может представлять собой источник файлов, включающий в себя этапы программы, которые были получены из сети и сохранены в запоминающем устройстве и затем выполняются. Таким образом, этапы обработки, необходимые для осуществления операций в соответствии с изобретением, могут быть воплощены в виде программного продукта 514. На фиг.5 представлен примерный накопитель данных, соединенный с главным процессором, в результате чего главный процессор может считывать информацию из и записывать информацию на накопитель данных. В качестве альтернативы накопитель данных может быть выполнен как единый блок с главным процессором.
Интерфейс 516 пользователя соединен как с главным процессором 510, так и с DSP 508. Например, интерфейс пользователя может включать в себя кнопочную панель или специальные функциональные клавиши или кнопки, которые соединены с главным процессором 510 и которые пользователь может использовать для запроса специфической операции с помощью устройства инициализации. Интерфейс 516 пользователя также может включать в себя громкоговоритель, который соединен с DSP 510 и используется для вывода звуковых данных для пользователя.
Для специалистов в данной области техники будет понятно, что информация и сигналы могут быть представлены с использованием любой из множества различных технологий и методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, на которые может быть сделана ссылка в приведенном выше описании, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любыми их комбинациями.
Для специалистов в данной области техники также будет понятно, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные совместно с приведенными здесь вариантами осуществления, могут быть выполнены как электронные аппаратные средства, компьютерные программные средства или их комбинации. Для ясной иллюстрации такой взаимозаменяемости аппаратных и программных средств различные иллюстративные компоненты, блоки, модули, схемы и этапы были описаны выше в общем с точки зрения выполняемых функций. Воплощение такой функции в виде аппаратного или программного средства зависит от конкретного варианта применения и конструктивных ограничений, накладываемых на всю систему. Специалисты в данной области техники могут выполнять описанные функции различными путями для каждого конкретного варианта применения, но такие решения в отношении варианта осуществления не следует интерпретировать как выход за рамки настоящего изобретения.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытыми здесь вариантами осуществления, могут быть воплощены или выполнены с использованием процессора общего назначения, цифрового сигнального процессора (DSP), специализированных интегральных схем (ASIC), программируемой вентильной матрицы (FPGA) или других программируемых логических устройств, дискретных логических элементов или транзисторной логики, дискретных аппаратных компонентов или с использованием любых их комбинаций, разработанных для осуществления описанных здесь функций. Процессор общего назначения может представлять собой микропроцессор, но в качестве альтернативы процессор может представлять собой любой обычный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть воплощен как комбинация вычислительных устройств,например как комбинация DSP и микропроцессора, множество микропроцессоров, один или больше микропроцессоров совместно с ядром DSP, или с использованием любой другой такой конфигурации.
Способ или методика, описанные совместно с раскрытыми здесь вариантами осуществления, могут быть воплощены непосредственно в виде аппаратных средств, в виде программного модуля, выполняемого процессором, или с использованием комбинации этих двух подходов. Программный модуль может находиться в памяти ОЗУ, запоминающем устройстве типа флэш, в памяти ПЗУ, запоминающем устройстве EPROM, запоминающем устройстве EEPROM, в регистрах, на жестком диске, на съемном диске, на CD-ROM или на носителе данных любой другой формы, известном в данной области техники. Примерный носитель данных соединен с процессором таким образом, что процессор может считывать информацию из и записывать информацию на носитель данных. В качестве альтернативы носитель данных может быть выполнен интегрировано с процессором. Процессор и носитель данных могут находиться в ASIC. ASIC могут быть установлены в терминале пользователя. В качестве альтернативы процессор и носитель данных могут быть установлены как дискретные компоненты в терминале пользователя.
Предыдущее описание раскрытых вариантов осуществления представлено с тем, чтобы обеспечить возможность любому специалисту в данной области техники изготовить или использовать настоящее изобретение. Различные модификации этих вариантов осуществления будут очевидны для специалиста в данной области техники, и обобщенные принципы, определенные здесь, можно применять к другим вариантам осуществления без отхода от сущности или объема изобретения. Таким образом, настоящее изобретение не предназначено для ограничения представленными здесь вариантами осуществления, но должно соответствовать самому широкому объему, соответствующему раскрытым здесь принципам и новым признакам.
Изобретение относится к беспроводной связи. Способ и устройство, предназначенные для управления скоростью передачи данных, в системе беспроводной связи во время передачи обслуживания. Управление скоростью передачи данных включает в себя прием передач от множества базовых станций, причем, по меньшей мере, одна из принятых передач включает в себя сообщение подтверждения. Затем производится определение команды управления скоростью, включенной в передачу базовой станции, которая включает в себя сообщение подтверждения, и использование этой команды для управления скоростью передачи данных. Управление скоростью передачи данных также включает в себя прием передач от множества базовых станций. Затем выполняется определение множества команд управления скоростью, включенных в принятые передачи от множества базовых станций. Команды управления скоростью затем комбинируют и используют для управления скоростью передачи данных, что является техническим результатом. 12 н. и 26 з.п. ф-лы, 5 ил.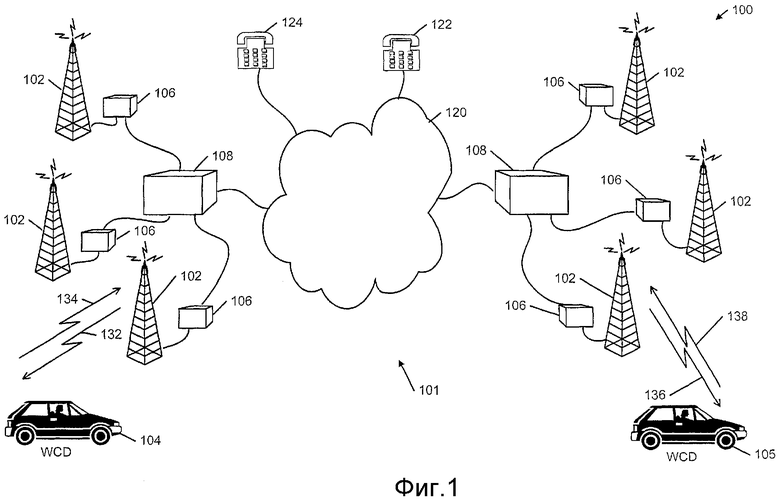
приема передач от множества базовых станций, в котором каждая принятая передача включает в себя индикатор управления скоростью передачи данных, и по меньшей мере одна из передач дополнительно включает в себя сообщение подтверждения;
применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач; и
установления скорости передачи данных передачи во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных.
приема передач от множества базовых станций, причем каждая принятая передача включает в себя индикатор управления скоростью передачи данных;
применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач от множества базовых станций;
и установления скорости передачи данных во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных,
причем скорость передачи данных устанавливают с первой скорости передачи данных для одной базовой станции на другую скорость передачи данных для другой базовой станции во время передачи обслуживания.
приемник, выполненный с возможностью приема передач от множества базовых станций, причем каждая принятая передача включает в себя индикатор управления скоростью передачи данных;
процессор, выполненный с возможностью применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач от множества базовых станций, и установления скорости передачи данных передачи во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных,
причем скорость передачи данных устанавливают с первой скорости передачи данных для одной базовой станции на другую скорость передачи данных для другой базовой станции во время передачи обслуживания.
приема передач от множества базовых станций, в котором каждая принятая передача включает в себя индикатор управления скоростью передачи данных, и по меньшей мере одна из передач дополнительно включает в себя сообщение подтверждения;
применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач; и
установления скорости передачи данных во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных.
приема передач от множества базовых станций, причем каждая принятая передача включает в себя индикатор управления скоростью передачи данных;
применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач от множества базовых станций; и
установления скорости передачи данных во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных,
причем скорость передачи данных устанавливают с первой скорости передачи данных для одной базовой станции на другую скорость передачи данных для другой базовой станции во время передачи обслуживания.
средство для приема передач от множества базовых станций, причем каждая принятая передача включает в себя индикатор управления скоростью передачи данных, и по меньшей мере одна из передач дополнительно включает в себя сообщение подтверждения; и
средство для применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач, и
средство для установления скорости передачи данных передачи во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных.
средство для применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач от множества базовых станций, и
средство для установления скорости передачи данных передачи во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных,
причем скорость передачи данных устанавливают с первой скорости передачи данных для одной базовой станции на другую скорость передачи данных для другой базовой станции во время передачи обслуживания.
антенну;
приемник, выполненный с возможностью приема через антенну передач от множества базовых станций, причем каждая принятая передача
включает в себя индикатор управления скоростью передачи данных, и по меньшей мере одна из передач дополнительно включает в себя сообщение подтверждения; и
главный процессор, выполненный с возможностью применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач, и установления скорости передачи данных передачи во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных.
антенну;
приемник, выполненный с возможностью приема через антенну передач от множества базовых станций, причем каждая принятая передача включает в себя индикатор управления скоростью передачи данных, и по меньшей мере одна из передач дополнительно включает в себя сообщение подтверждения; и
контроллер базовой станции, выполненный с возможностью применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач, и установления скорости передачи данных передачи во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных.
приемник, выполненный с возможностью приема через антенну передач от множества базовых станций, причем каждая принятая передача включает в себя индикатор управления скоростью передачи данных;
главный процессор, выполненный с возможностью применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач от множества базовых станций, и установления скорости передачи данных передачи во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных,
причем скорость передачи данных устанавливают с первой скорости передачи данных для одной базовой станции на другую скорость передачи данных для другой базовой станции во время передачи обслуживания.
антенну;
приемник, выполненный с возможностью приема через антенну передач от множества базовых станций, причем каждая принятая передача включает в себя индикатор управления скоростью передачи данных;
контроллер базовой станции, выполненный с возможностью применения весовых коэффициентов к индикаторам управления скоростью передачи данных принятых передач от множества базовых станций, и установления скорости передачи данных передачи во время передачи обслуживания на основе взвешенных индикаторов управления скоростью передачи данных,
причем скорость передачи данных устанавливают с первой скорости передачи данных для одной базовой станции на другую скорость передачи данных для другой базовой станции во время передачи обслуживания.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| RU 98116734 А, 20.07.2000 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

