Настоящее изобретение относится к способу и устройству для повышения эффективности торможения летательного аппарата во время его движения по земле.
Известно, что современные самолеты, в частности гражданские транспортные самолеты, имеют удлиненный фюзеляж, поддерживаемый на земле основным шасси, расположенным в промежуточном положении этого фюзеляжа, и управляемым передним шасси, обычно именуемым носовым шасси. Кроме того, колеса основного шасси снабжены тормозами, тогда как переднее шасси, которое используют для поворотов самолета при движении на земле, имеет колеса без тормозов.
Следствием такой конструкции является то, что когда такой самолет, осуществляя движение по земле, включает тормоза, тормозное усилие, создаваемое колесами основного шасси, приводит к образованию момента пикирования, стремящемуся ослабить нагрузку на основное шасси и повысить нагрузку на переднее шасси. Следовательно, основное шасси взаимодействует с землей с давлением, недостаточным для оптимального эффективного торможения самолета.
Целью настоящего изобретения являются устранение этого недостатка и обеспечение постоянного оптимального торможения такого самолета, осуществляющего движение по земле.
Для этого согласно настоящему изобретению предлагается способ повышения эффективности торможения летательного аппарата, осуществляющего движение по земле, при этом летательный аппарат имеет удлиненный фюзеляж и снабжен:
основным шасси, расположенным в промежуточном положении этого фюзеляжа и содержащим колеса, оснащенные тормозами;
управляемым передним шасси, расположенным спереди фюзеляжа и используемым для бокового направления летательного аппарата при движении по земле, при этом переднее шасси содержит колеса без тормозов; и
управляемыми аэродинамическими поверхностями, расположенными сзади фюзеляжа и выполненными с возможностью генерировать переменную отрицательную подъемную силу,
отличающийся тем, что
на предварительной фазе определяют опорную величину вертикальной силы, оказываемой землей на переднее шасси, при этом такая опорная величина способна обеспечить удовлетворительную эффективность переднего шасси для бокового направления летательного аппарата, когда летательный аппарат осуществляет движение по земле; затем
когда летательный аппарат, осуществляя движение по земле, тормозит:
измеряют мгновенную вертикальную силу, фактически оказываемую землей на переднее шасси, и
управляют задними аэродинамическими поверхностями так, чтобы они генерировали отрицательную подъемную силу, имеющую величину, по меньшей мере, приблизительно равную указанной опорной величине.
Таким образом, с помощью настоящего изобретения создается момент кабрирования в противовес указанному моменту пикирования от торможения посредством управления вертикальной силой на переднем шасси и эффективность торможения самолета повышается, а следовательно, уменьшается длина пробега, необходимого самолету для остановки, но в то же время сохраняется достаточная способность передней опоры шасси направлять самолет вбок. Следует также отметить, что путем отклонения указанных аэродинамических поверхностей увеличивается аэродинамическое сопротивление самолета, что также способствует торможению.
Указанную опорную величину вертикальной силы, оказываемой землей на переднее шасси, можно определить путем расчетов или прямым экспериментальным измерением на переднем шасси. Она выбирается для обеспечения достаточного бокового управления летательным аппаратом и для сохранения границы мощности на штурвальной колонке.
Когда самолет в качестве управляемых задних аэродинамических поверхностей содержит как регулируемый горизонтальный стабилизатор, так и шарнирно установленные на этом стабилизаторе рули высоты, указанная отрицательная подъемная сила может быть получена действием на этом регулируемом горизонтальном стабилизаторе, или действием на рулях высоты, или одновременным действием на регулируемом горизонтальном стабилизаторе и на рулях высоты.
Однако реализация способа по настоящему изобретению особенно облегчается, когда используются только рули высоты. На практике, когда самолет совершает движение по земле с включенными тормозами, потребуется модифицировать лишь характеристику отклонения рулей высоты самолета по команде на отклонение так, чтобы, когда эта команда равна нулю, угол отклонения рулей высоты принимал величину кабрирования.
Настоящее изобретение также относится к устройству для реализации описанного выше способа. Помимо средства, генерирующего характеристику, дающую угол отклонения рулей высоты в соответствии с командой на отклонение, при этом такая характеристика имеет нейтральную точку, устройство по настоящему изобретению может содержать:
средство для непрерывного измерения вертикальной силы, приложенной к управляемому переднему шасси, когда самолет движется по земле с включенными тормозами;
запоминающее устройство, в котором хранится указанная опорная величина;
средство сравнения, получающее указанные непрерывные измерения вертикальной силы и опорную величину и рассчитывающее разницу;
вычислительное средство, получающее указанную разницу и измерения скорости движения летательного аппарата по земле и выдающее величину кабрирования для угла отклонения рулей высоты, которая не равна нулю, когда команда на отклонение равна нулю, при этом не равная нулю величина кабрирования уменьшается вместе со скоростью летательного аппарата;
вычислительное средство, которое из указанной не равной нулю величины кабрирования определяет измененную характеристику, дающую угол отклонения рулей высоты, соответствующий команде на отклонение; и
переключающее средство для приложения к указанным рулям высоты либо обычной характеристики, либо измененной характеристики в зависимости от того, применены ли тормоза колес основного шасси или нет.
Приложенные чертежи позволят понять, как можно осуществить настоящее изобретение. На этих чертежах одинаковыми ссылочными номерами обозначены одинаковые элементы.
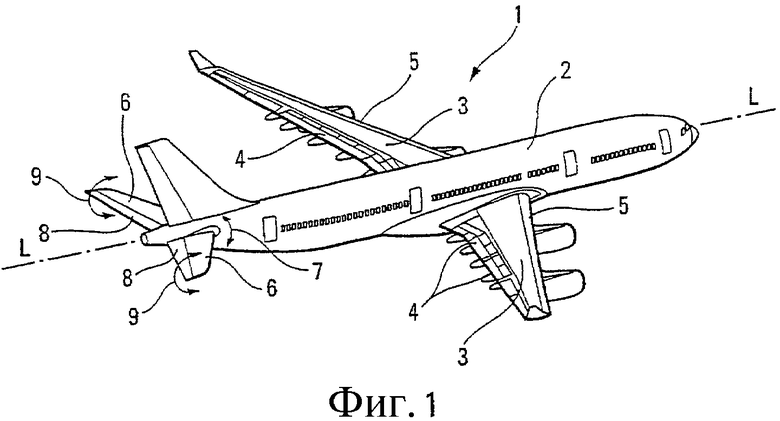
Фиг.1 - общий вид сверху и в перспективе гражданского широкофюзеляжного самолета;
Фиг.2А, 2Б, 2В - иллюстрируют способ по настоящему изобретению.
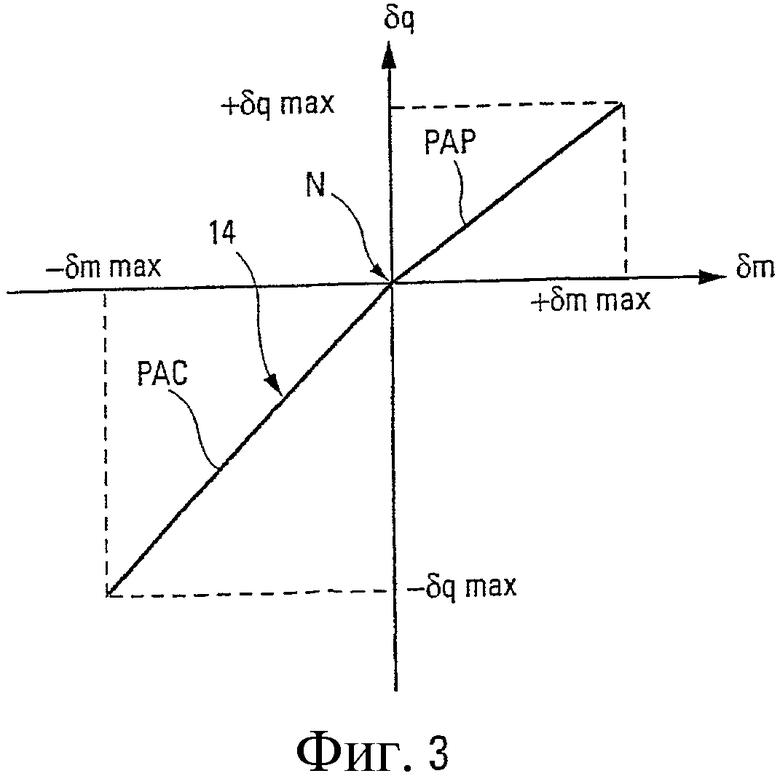
Фиг.3 - обычная характеристика самолета, показывающая величину угла δq рулей высоты самолета в соответствии с командой δm на отклонение.
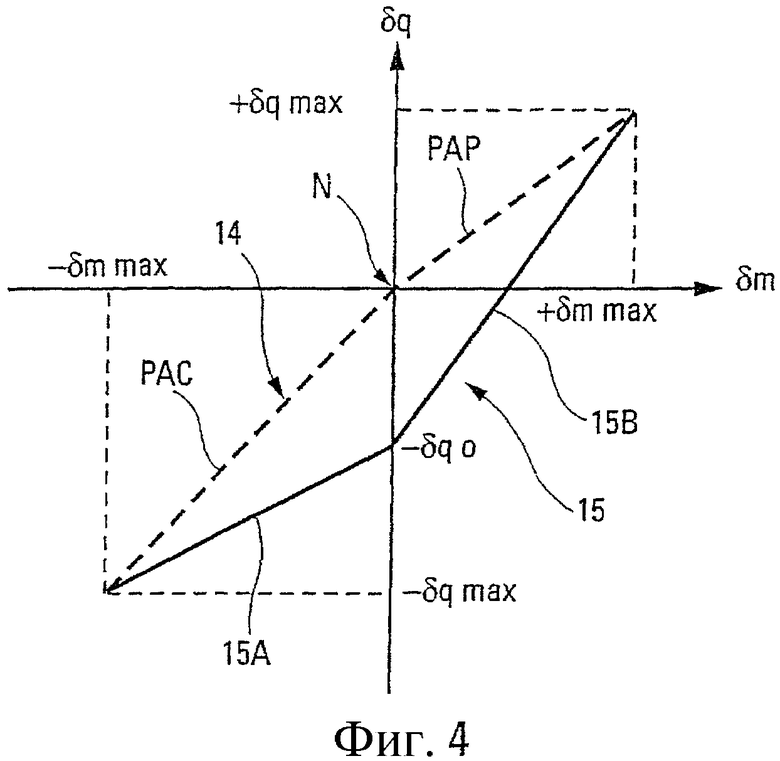
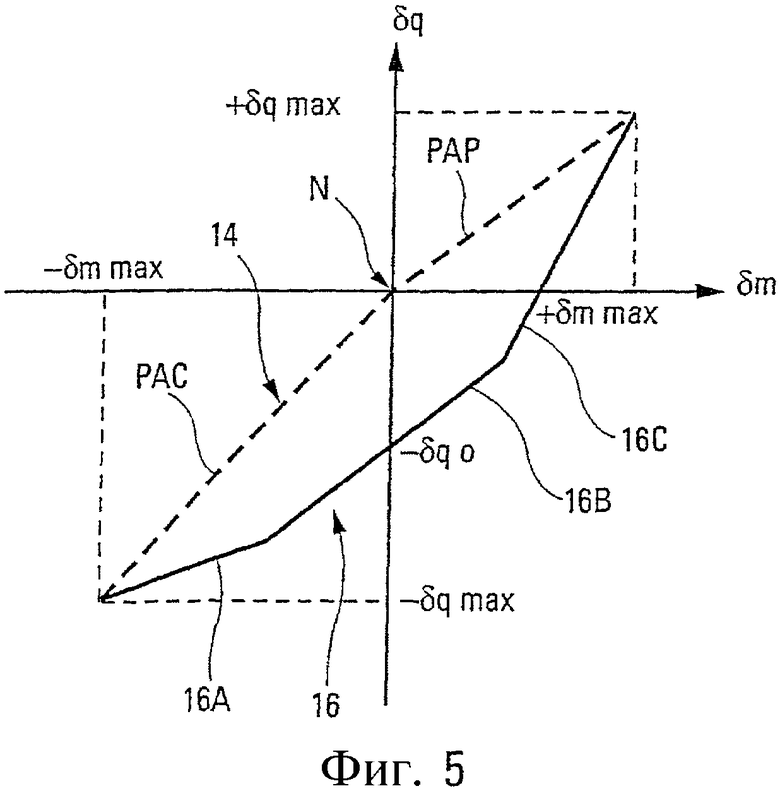
Фиг.4 и 5 - два примера характеристик δq, δm, измененных в соответствии с настоящим изобретением.
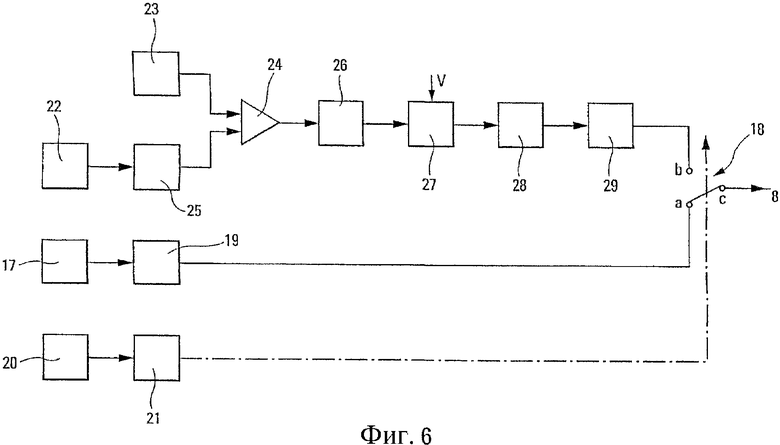
Фиг.6 - блок-схема примера варианта системы, реализующей способ по настоящему изобретению.
Широкофюзеляжный самолет 1, на Фиг. 1 схематически показанный в полете, содержит фюзеляж 2, удлиненный вдоль продольной оси L-L, и крылья 3, снабженные закрылками 4 и предкрылками 5. Он также содержит горизонтальный стабилизатор 6 с регулировкой угла наклона, как показано двойной стрелкой 7. На задней кромке регулируемого горизонтального стабилизатора 6 шарнирно установлены рули высоты, которые могут поворачиваться относительно горизонтального стабилизатора 6, как показано двойной стрелкой 9.
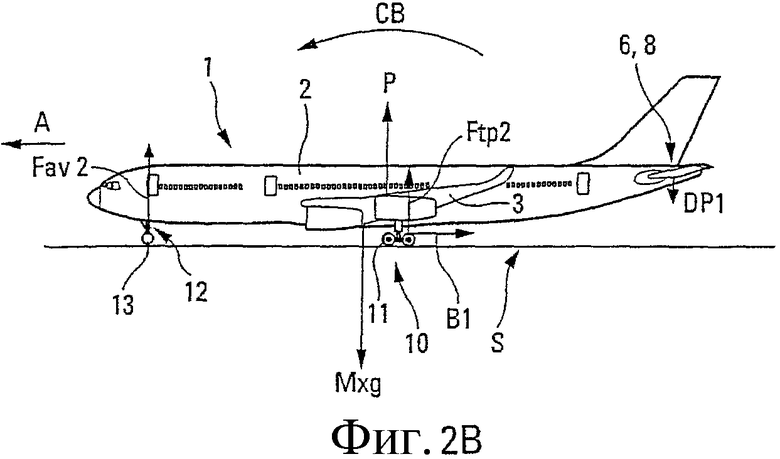
Кроме того, как показано на Фиг.2А, 2В и 2С, самолет 1 содержит основное шасси 10, расположенное в промежуточном положении относительно фюзеляжа 2 и снабженное колесами 11, оснащенными известным и не показанным на чертежах способом тормозами, и управляемое переднее шасси 12 (обычно называемое носовым шасси), расположенное спереди фюзеляжа 2 и используемое для управления самолетом 1, когда последний движется по земле. Это переднее шасси 12 содержит колеса 13 без тормозов.
На Фиг. 2А, 2В и 2С самолет 1 показан в трех разных ситуациях, когда он движется по земле S в направлении А со скоростью V, опираясь на свои шасси 10 и 12, колеса 11 и 13 которых катятся по земле S. В каждой из этих трех ситуаций крылья 3 и соответствующие закрылки и предкрылки 4 и 5 вырабатывают равную подъемную силу P, тогда как горизонтальный стабилизатор 6 и/или рули высоты 8 вырабатывают отрицательную подъемную силу DP, имеющую величину DP1 или DP2. В этих трех ситуациях на самолет 1 действует его вес M·g, где M - масса самолета, а g - гравитационное ускорение.
В ситуации, представленной на Фиг. 2А, предполагается, что самолет 1, на который действует подъемная сила Р, вес M·g и слабая отрицательная подъемная сила DP1 (из-за нормального положения горизонтального стабилизатора 6 и рулей высоты 8, являющихся аэродинамическим продолжением этого стабилизатора), свободно движется по земле S, когда на колеса 11 не действуют тормоза. В результате на шасси 10 и 12 соответственно воздействуют вертикальные силы Ftp и Fav, имеющие соответствующие величины Ftp1 и Fav1, при этом сила Fav1, действующая на переднее шасси 12, достаточна для функции управления самолетом 1 на земле, осуществляемой этим передним 12 шасси. Разумеется, величины Fav1 и Ftp1 зависят от отрицательной подъемной силы DP1, от веса M·g, от продольного положения центра тяжести самолета 1, от подъемной силы Р (т.е. скорости и конфигурации закрылков 4 и предкрылков 5) и от продольного аэродинамического момента.
На Фиг.2В предполагается, что на основе ситуации по Фиг.2А тормоза колес 11 основной опоры 10 шасси задействованы для создания тормозной силы В, чтобы остановить самолет либо при посадке, либо при прерывании взлета. Эта тормозная сила генерирует момент СВ пикирования, увеличивающий нагрузку на переднее 12 шасси и уменьшающий нагрузку на основное шасси 10 так, что вертикальная сила Ftp принимает величину Ftp2, которая меньше величины Ftp1, а вертикальная сила Fav принимает величину Fav2, которая больше величины Fav1. Поскольку нагрузка на основное шасси 10 уменьшена, его колеса 11 не оптимально прижаты к земле S и тормозная сила В ограничена исключительно величиной В1, которая не оптимальна.
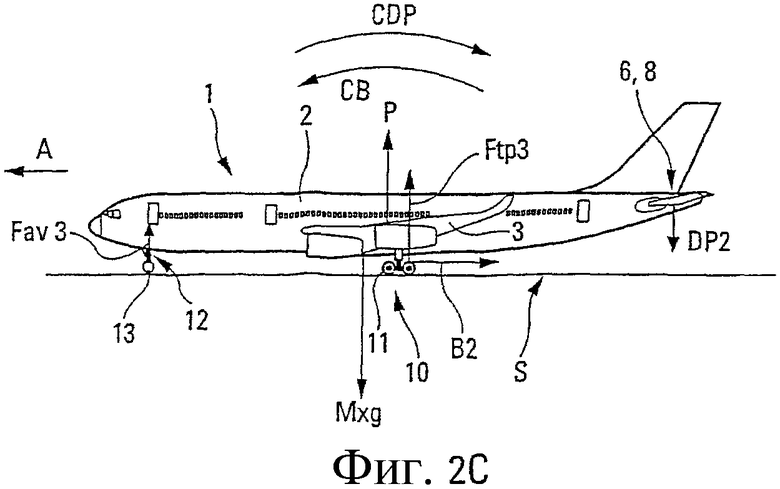
Чтобы иметь возможность увеличить тормозную силу до величины, превышающей величину В1, в способе по настоящему изобретению (см. Фиг.2С) применяется регулируемый горизонтальный стабилизатор 6 и/или рули 8 высоты для увеличения, по меньшей мере, пока применены тормоза колес 11, отрицательной подъемной силы DP до величины DP2, которая превышает DP1. В результате этого увеличения отрицательной подъемной силы возникает момент CDP пикирования, противодействующий тормозному моменту СВ и который, когда на колесах 11 основного шасси 10 применены тормоза, уменьшает нагрузку на переднее 12 шасси и нагружающий основное шасси 10. Тогда вертикальная сила Fav на переднем шасси 12 может принять величину Fav3, которая меньше Fav2, а вертикальная сила Ftp на основном 10 шасси может принять величину Ftp3, которая больше Ftp2.
Таким образом, создавая отрицательную подъемную силу DP с величиной DP2, которая больше, чем обычная величина DP1, используемая в ситуациях по Фиг.2А и 2В, сила Ftp увеличивается до величины, превышающей Ftp2, так что колеса 11 правильно прижимаются к земле и тормозная сила может принять величину В2, превышающую В1, что делает торможение более эффективным. Более того, величина DP2 выбирается такой, чтобы величина Fav3, которую принимает вертикальная сила Fav на переднем шасси 12, позволяла упомянутому переднему шасси 12 осуществлять управление самолетом 1 на земле.
Способ по настоящему изобретению, таким образом, заключается в том, чтобы, управляя отрицательной подъемной силой DP, управлять вертикальной силой Fav, воздействующей на переднее шасси 12 так, чтобы она принимала величину Fav3, используемую как опорная.
Как указано выше, увеличение отрицательной подъемной силы DP с величины DP1 до величины DP2 можно получить действием регулируемого горизонтального стабилизатора 6 или действием рулей 8 высоты или даже путем комбинированного действия регулируемого горизонтального стабилизатора 6 и рулей 8 высоты. Однако в том варианте, который особенно легко реализовать, преимущественно используются только рули 8 высоты.
Как показано кривой 14 на Фиг.3, известно, что в системе прямоугольных координат характеристика самолета 1, дающая угол δq отклонения рулей 8 высоты в соответствии с командой δm на отклонение, поступающей от штурвальной колонки, содержит участок РАР пикирования, обычно линейный, и участок РАС кабрирования, также обычно линейный, и эти участки пикирования и кабрирования соединены друг с другом в нейтральной точке N. Таким образом, при изменении команды δm на отклонение для пикирования между 0 и максимальной величиной +δmmax (и, наоборот, от +δmmax до 0) отклонение рулей 8 высоты, приводящее к пикированию изменяется от 0 до максимальной величины +δqmax (и, наоборот, от +δqmax до 0). Аналогично, при изменении команды δm на отклонение для кабрирования от 0 до максимальной величины -δmmax (и, наоборот, от -δmmax до 0) отклонение рулей 8 высоты, приводящее к кабрированию, изменяется от 0 и максимальной величины -δqmax (и, наоборот, от -δqmax до 0). Известно также, что, когда самолет 1 движется по земле S в обычных известных ситуациях, показанных на Фиг.2А и 2Б, команда δm на отклонение равна нулю (рули 8 высоты являются аэродинамическим продолжением горизонтального стабилизатора 6) так, что угол отклонения δq также равен нулю. Таким образом, мы находимся в нейтральной точке N характеристики 14 с возможной небольшой отрицательной подъемной силой величины DP1, создаваемой при обычном положении регулируемого горизонтального стабилизатора 6.
Согласно существенному признаку настоящего изобретения для получения величины DP2 отрицательной подъемной силы, превышающей величину DP1, когда штурвальная колонка находится в нейтральном положении, характеристика 14 по Фиг.3 модифицируется для того, чтобы угол δq отклонения принял величину -δqo кабрирования (способную выработать отрицательную подъемную силу величины DP2), когда команда δm на отклонение равна нулю (см. фиг.4 и 5).
В примере варианта, показанном на Фиг.4, характеристика 14 меняется на характеристику 15, содержащую участок 15А, например, прямой, соединяющий точку δm=0, δq=-δqo с точкой δm=-δm max, δq=-δq max, и участок 15В, например, прямой, соединяющий точку δm=0, δq=-δqo с точкой δm=+δm max, δq=+δq max.
Как вариант в приведенной в качестве примера характеристике, показанной на Фиг. 5, характеристика 14 модифицирована в характеристику 16, содержащую промежуточный участок 16В, например, прямой, проходящий через точку δm=0, δq=--δqo и концы которого соединены с точками δm=-δm max, δq=-δq max и δm=+δm max, δq=+δq max соответственно концевыми участками 16А и 16С, например, прямыми.
Очевидным является, что характеристики 15 и 16 по Фиг.4 и 5 являются лишь примерами и существует множество других возможностей.
Кроме того, поскольку во время действия В тормозов скорость V движения самолета по земле S падает, следовательно, подъемная сила Р уменьшается, тем самым увеличивая величины сил Ftp и Fav, и чтобы получить ту же величину Fav3 вертикальной силы Fav на переднем шасси 12, величину DP2 отрицательной подъемной силы DP необходимо соответственно уменьшать. Таким образом, величину DP2 необходимо уменьшать вместе с уменьшением скорости V самолета 1 так, чтобы это уменьшение было применимо к абсолютной величине [δqo] угла отклонения -δqo, генерирующего отрицательную подъемную силу DP2, когда команда на отклонение равна нулю.
На Фиг.6 представлена блок-схема системы для реализации способа по настоящему изобретению. Система содержит:
известное устройство 17, генерирующее обычную характеристику 14 (или любую другую подобную характеристику), имеющую нейтральную точку N, для которой
δm = 0 и δq = 0 ;
переключающее устройство 18, содержащее нормально закрытый контакт а, с которым через ограничитель уклона (например, 20о/с) соединено устройство 17, при этом переключающее устройство 18 содержит другой нормально открытый контакт b и общий контакт с, соединенный с системой управления рулями 8 высоты;
устройство 20 для выработки команды торможения для колес 11 основного шасси 10, при этом устройство 20 через счетчик 21 управляет переключением коммутирующего устройства 18 из нерабочего положения в рабочее положение;
средство 22 для измерения фактической вертикальной силы Fav, воздействующей на управляемое переднее шасси 12, когда самолет 1 движется по земле S, при этом средство 22 является, например, датчиком силы или датчиком давления;
запоминающее устройство 23, в котором хранится опорная величина Fav3 указанной вертикальной силы Fav;
средство 24 сравнения, получающее на входы соответственно опорную величину Fav3 от запоминающего устройства и измерения вертикальной силы Fav от средства 22 измерения через фильтр 25;
умножитель 26 для умножения сигнала разности, полученного от средства 24 сравнения, на коэффициент К, постоянный или зависящий от скорости V, представляющий эффективность воздействия рулей 8 высоты на вертикальную силу Fav, действующую на переднее шасси 12;
компьютер 27, получающий сигнал от умножителя 26 и сигнал, представляющий мгновенную скорость самолета 1 и вырабатывающий абсолютную величину δqo, уменьшающуюся вместе с уменьшением скорости V, способную в каждый данный момент создавать отрицательную подъемную силу DP2, необходимую для получения требуемой величины силы, воздействующей на переднее шасси 12;
ограничитель 28 уклона (например, 5о/с), получающий эту абсолютную величину δqo; и
вычислительное средство 29, которое на основе этой абсолютной величины δqo, полученной от ограничителя 28 уклона, определяет характеристику 15 или 16 (или любую другую подобную характеристику) и передает ее на нормально открытый контакт b коммутирующего устройства 18.
Таким образом, когда самолет 1 движется по земле S без применения тормозов, для управления рулями 8 высоты через подсистемы 17, 19, а и с доступна характеристика 14 (или любая подобная характеристика с нейтральной точкой N).
Наоборот, когда устройством 20 генерируется команда на торможение, которая поступает на колеса 11 основного шасси 10 во время, определенное счетчиком 21, последний переключает коммутатор 18 так, что общий контакт с теперь соединен с контактом b. В этом случае на общем контакте с для управления рулями 8 высоты появляется характеристика 15 (или характеристика 16, или любая другая характеристика с точкой δm=0 и δq=-δqo).
Когда команда на торможение снимается, переключающее устройство 18 переключается обратно так, чтобы вновь соединить контакты а и с и чтобы на контакте с вновь появилась характеристика 14. Ограничитель 19 уклона используется для устранения дополнительного момента кабрирования, когда исчезает тормозной момент СВ.
Система для улучшения эффективности торможения самолета по настоящему изобретению не ограничена вариантом, схематически показанным на Фиг.6 и приведенным для иллюстрации и для лучшего понимания изобретения. Например, система по Фиг.6 может быть модифицирована так, чтобы устройство 17, генерирующее характеристику 14 и компьютер 27, генерирующий характеристику 15 или 16, имели общие части.
Изобретение относится к средствам управления тормозами летательного аппарата. Способ торможения характеризуется тем, что рули (8) высоты и/или регулируемый горизонтальный стабилизатор (6) устанавливают так, чтобы создать отрицательную подъемную силу (DP2) и тем самым создать момент (CDP) на кабрирование для противодействия моменту (СВ) на пикирование в результате торможения. Величина отрицательной подъемной силы (DP2) согласуется с имеющей опорную величину (Fav3) вертикальной силой, оказываемой землей на переднее шасси (12). Предложено также устройство для осуществления способа, включающее средства измерения силы и воздействия на рули высоты. Изобретения направлены на реализацию оптимального торможения при посадке. 2 н. и 5 з.п. ф-лы, 6 ил.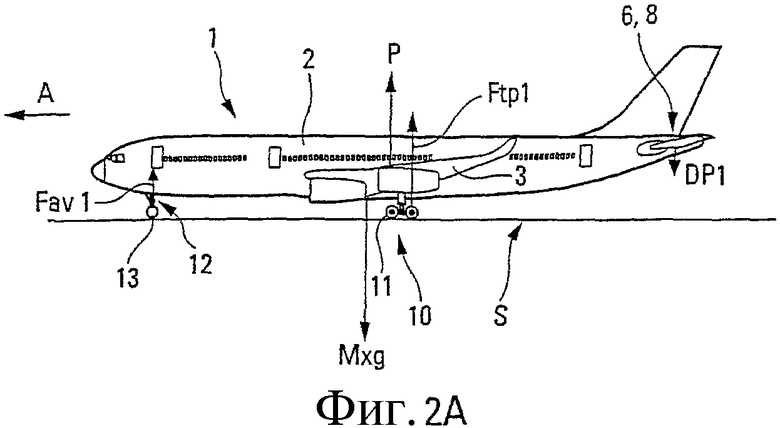
основным шасси (10), расположенным в промежуточном положении упомянутого фюзеляжа (2) и содержащим колеса (11), оснащенные тормозами;
управляемым передним шасси (12), расположенным спереди упомянутого фюзеляжа (2) и используемым для бокового направления упомянутого летательного аппарата (1) при движении по земле (S), при этом переднее шасси (12) содержит колеса (13) без тормозов; и
управляемыми аэродинамическими поверхностями (6, 8), расположенными сзади фюзеляжа (2) и выполненными с возможностью генерировать переменную отрицательную подъемную силу (DP), где
на предварительной фазе определяют опорную величину (Fav3) вертикальной силы (Fav), оказываемой землей (S) на упомянутое переднее шасси (12), при этом упомянутая опорная величина способна обеспечить удовлетворительную эффективность упомянутого переднего шасси (12) для бокового направления летательного аппарата (1), когда летательный аппарат осуществляет движение по земле; затем
когда упомянутый летательный аппарат (1), осуществляя движение по земле (S), тормозит:
измеряют мгновенную вертикальную силу (Fav), фактически оказываемую землей (S) на переднее шасси (12), и
управляют задними аэродинамическими поверхностями (6, 8) так, чтобы они генерировали отрицательную подъемную силу (DP2), способную поддерживать упомянутую мгновенную вертикальную силу (Fav) на величине, по меньшей мере, приблизительно равной упомянутой опорной величине (Fav3).
средство (22) для непрерывного измерения вертикальной силы (Fav), воздействующей на управляемое переднее шасси (12), когда летательный аппарат (1) движется по земле с примененными тормозами;
запоминающее устройство (23), в котором хранится упомянутая опорная величина (Fav3);
средство (24) сравнения, получающее непрерывное измерение вертикальной силы (Fav) и упомянутую опорную величину (Fav3) и рассчитывающее разницу;
вычислительное средство (27), получающее упомянутую разницу и измерение скорости (V) движения летательного аппарата (1) по земле и выдающее для угла (δq) отклонения упомянутых рулей (8) величину (-δqo) кабрирования, не равную нулю, когда команда (δm) на отклонение равна нулю, при этом не равная нулю величина кабрирования уменьшается вместе со скоростью (V) самолета;
вычислительное средство (29), которое из указанной не равной нулю величины кабрирования определяет измененную характеристику (15, 16), дающую угол (δq) рулей (8) высоты в соответствии с командой (δm) на отклонение; и
коммутирующее средство (18) для приложения к указанным рулям (8) высоты либо упомянутой обычной характеристики (14), либо упомянутой модифицированной характеристики (15, 16) в зависимости от того, применены тормоза колес (11) основного шасси (10) или нет.
| Присоединительный зажим | 1980 |
|
SU936114A1 |
| ГАЗОГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 1982 |
|
SU1083494A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009077C1 |

