Изобретение относится к радиосвязи и может быть использовано для демодуляции фазоманипулированных, а также фазомодулированных сигналов.
Известен способ демодуляции фазомодулированных сигналов (ФМС), состоящий в том, что на два нелинейных элемента одновременно подаются в противофазе высокочастотный ФМС и в фазе высокочастотное опорное колебание с частотой, равной несущей частоте ФМС. В результате происходит сравнение изменяемой во времени фазы ФМС и постоянной фазы опорного колебания, вследствие чего осуществляется преобразование ФМС в амплитудно-модулированный и фазомодулированный сигнал (АФМС). При этом амплитуда изменяется по закону изменения фазы. Этот сигнал далее испытывает такие же преобразования, как и в амплитудном демодуляторе [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292]. Это означает, что на нелинейных элементах спектр АФМС разрушается на низкочастотные и высокочастотные составляющие. Далее с помощью фильтра нижних частот выделяется низкочастотная составляющая, амплитуда которой изменяется по закону изменения фазы входного ФМС. Затем, с помощью разделительной емкости, включенной в продольную цепь (последовательно), устраняется постоянная составляющая, возникшая на нелинейных элементах в результате взаимодействия с АФМС. После этого низкочастотные колебания, содержащие полезную информацию, выделяются на низкочастотной нагрузке.
Недостаток такого способа и устройства его реализации состоит в том, что для выделения низкочастотного сигнала, амплитуда которого изменяется в соответствии с законом изменения фазы высокочастотного ФМС, необходимо наличие генератора опорных колебаний.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ демодуляции фазомодулированных сигналов, состоящий в том, что для демодуляции ФМС используют частотный детектор, состоящий из каскадно-соединенных амплитудного ограничителя, преобразователя частотно-модулированного сигнала (ЧМС) в амплитудно-частотно-модулированный сигнал (АЧМС) в виде параллельного колебательного контура и обычного амплитудного демодулятора. Далее процесс выделения низкочастотной составляющей осуществляется также, как описано выше. Особенность использования частотного детектора для демодуляции ФМС состоит в том, что если частота несущего сигнала ФМС расположена на правом склоне амплитудно-частотной характеристики (АЧХ) контура, то низкочастотную составляющую подают на дифференцирующую цепь. Если частота несущего сигнала ФМС расположена на левом склоне АЧХ контура, то низкочастотную составляющую подают на интегрирующую цепь [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292]. При необходимости между источником модулированных сигналов и нелинейным элементом или между нелинейным элементом и нагрузкой включают реактивный или резистивный четырехполюсник для согласования и дополнительной селекции сигнала и помехи. В результате на выходе устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения огибающей входного высокочастотного фазомодулированного колебания.
Недостаток способа и устройства его реализации состоит в том, что после преобразования ФМС в АФМС глубина амплитудной модуляции АФМС не контролируется и, как правило, бывает незначительной по величине, что ухудшает помехоустойчивость [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292; Гоноровский И.С. Радиотехнические цепи и сигналы. М.: Радио и связь, 1986, стр.247-252]. Другим недостатком является дополнительное наличие колебательного контура для преобразования ФМС в АФМС. Этот недостаток связан с тем, что классическая теория радиотехнических цепей предполагает, что нелинейный элемент является чисто резистивным и безынерционным, в связи с чем никак не реагирует на изменение частоты и фазы входного сигнала, а реагирует только на изменение амплитуды. Между тем, повседневный опыт показывает, что нелинейные элементы имеют внутренние емкости и индуктивности, которые оказывают существенное влияние на формирование зависимости их проводимости (сопротивления или элементов матрицы проводимостей или сопротивлений) от частоты и фазы. Особенно существенно это проявляется с повышением частоты, к чему в настоящее время в основном стремятся проектировщики новых систем и средств радиосвязи.
Техническим результатом изобретения является обеспечение демодуляции ФМС без использования генератора опорных колебаний и параллельного колебательного контура с преобразованием ФМС в АФМС с помощью высокочастотной части демодулятора при заданной глубине амплитудной модуляции АФМС на высокочастотной нагрузке, что повышает помехоустойчивость приемника.
1. Указанный результат достигается тем, что в способе демодуляции фазомодулированных сигналов, состоящем в том, что демодулятор включают между источником радиочастотных фазомодулированных сигналов и низкочастотной нагрузкой и выполняют его из четырехполюсника, нелинейного элемента, фильтра нижних частот, фазомодулированный сигнал преобразовывают в амплитудно-фазомодулированный сигнал, с помощью нелинейного элемента разрушают спектр амплитудно-фазомодулированного сигнала на высокочастотные и низкочастотные составляющие, с помощью фильтра нижних частот выделяют информационный низкочастотный сигнал, амплитуда которого изменяется по закону изменения фазы фазомодулированного входного сигнала, дополнительно в качестве нелинейного элемента используют трехполюсный элемент, который включают между источником радиочастотных фазомодулированных сигналов и четырехполюсником или между четырехполюсником и введенной высокочастотной нагрузкой по схеме с общим эмиттером, базой или коллектором, четырехполюсник выполняют из числа резистивных двухполюсников, не меньшего трех, значения параметров которых выбраны из условия обеспечения требуемых значений амплитуд в двух состояниях и глубины амплитудной модуляции амплитудно-фазомодулированного сигнала, преобразование фазомодулированного сигнала в амплитудно-фазомодулированный сигнал осуществляют путем подачи этого сигнала на правый склон зависимости модуля одного из комплексных элементов матрицы сопротивлений нелинейного элемента от частоты, низкочастотную составляющую амплитудно-фазомодулированного сигнала подают на дифференцирующую цепь, либо преобразование фазомодулированного сигнала в амплитудно-фазомодулированный сигнал осуществляют путем подачи этого сигнала на левый склон зависимости модуля одного из комплексных элементов матрицы сопротивлений нелинейного элемента от частоты, при этом низкочастотную составляющую амплитудно-фазомодулированного сигнала подают на интегрирующую цепь, либо преобразование фазомодулированного сигнала в амплитудно-фазомодулированный сигнал осуществляют путем подачи этого сигнала на правый склон зависимости модуля одного из комплексных элементов матрицы проводимостей нелинейного элемента от частоты, низкочастотную составляющую амплитудно-фазомодулированного сигнала подают на интегрирующую цепь, либо преобразование фазомодулированного сигнала в амплитудно-фазомодулированный сигнал осуществляют путем подачи этого сигнала на левый склон зависимости модуля одного из комплексных элементов матрицы проводимостей нелинейного элемента от частоты, при этом низкочастотную составляющую амплитудно-фазомодулированного сигнала подают на дифференцирующую цепь.
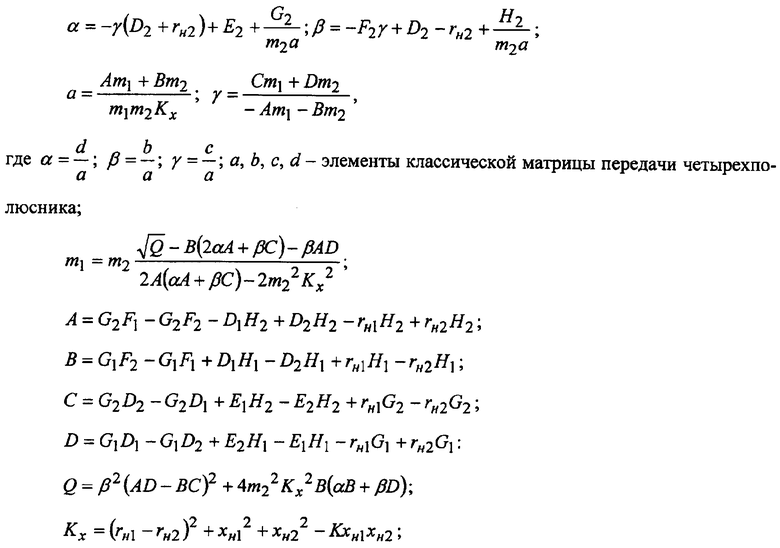
2. Указанный результат достигается тем, что в устройстве демодуляции фазомодулированных сигналов, включенном между источником фазомодулированных сигналов и низкочастотной нагрузкой и состоящем из преобразователя фазомодулированных сигналов в амплитудно-фазомодулированный сигнал, четырехполюсника, нелинейного элемента, фильтра нижних частот, дополнительно в качестве нелинейного элемента использован трехполюсный элемент, преобразователь фазомодулированных сигналов в амплитудно-фазомодулированный сигнал выполнен в виде этого нелинейного элемента, тип которого выбран таким образом, что левый или правый склоны зависимости одного из комплексных элементов его матрицы проводимостей от частоты совпадали с частотой несущего колебания фазомодулированных сигналов, нелинейный элемент включен между источником фазомодулированных сигналов и четырехполюсником по схеме с общим эмиттером, базой или коллектором, при выборе левого склона указанной зависимости в качестве низкочастотной нагрузки использована дифференцирующая цепь, а при выборе правого склона - интегрирующая цепь, четырехполюсник выполнен из числа резистивных двухполюсников, не меньшего трех, значения параметров которых выбраны из условия обеспечения требуемых значений амплитуд в двух состояниях и глубины амплитудной модуляции амплитудно-фазомодулированного сигнала путем использования следующих математических выражений:
- заданные элементы матрицы проводимости управляемого трехполюсного элемента в двух состояниях (I и II), определяемых двумя крайними значениями частоты входного фазомодулированного сигнала;  - значения модулей коэффициента передачи высокочастотной части демодулятора в двух состояниях входного сигнала, характеризуемых двумя крайними значениями частоты фазомодулированного сигнала; mвх - постоянное значение модуля входного сигнала;
- значения модулей коэффициента передачи высокочастотной части демодулятора в двух состояниях входного сигнала, характеризуемых двумя крайними значениями частоты фазомодулированного сигнала; mвх - постоянное значение модуля входного сигнала;  - значения фаз входного сигнала в двух его состояниях, характеризуемых двумя крайними значениями частоты фазомодулированного сигнала; m21, М21 - отношение модулей коэффициентов передачи высокочастотной части демодулятора в двух состояниях входного сигнала и глубина амплитудной модуляции амплитудно-фазомодулированного сигнала; zн1,н2=rн1,н2+jxн1,н2, z01,02=r01,02+jx01,02 - заданные комплексные сопротивления высокочастотной нагрузки и источника фазомодулированного сигнала в двух его состояниях.
- значения фаз входного сигнала в двух его состояниях, характеризуемых двумя крайними значениями частоты фазомодулированного сигнала; m21, М21 - отношение модулей коэффициентов передачи высокочастотной части демодулятора в двух состояниях входного сигнала и глубина амплитудной модуляции амплитудно-фазомодулированного сигнала; zн1,н2=rн1,н2+jxн1,н2, z01,02=r01,02+jx01,02 - заданные комплексные сопротивления высокочастотной нагрузки и источника фазомодулированного сигнала в двух его состояниях.
3. Указанный результат достигается тем, что в устройстве демодуляции фазомодулированных сигналов по п.2 резистивный четырехполюсник выполнен в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое Г-образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе Г-образное соединение, выбраны с помощью следующих математических выражений:
 ;
;  ;
;  ,
,
где α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r1 выбирается из условия обеспечения физической реализуемости сопротивлений r2, r3, r4.
4. Указанный результат достигается тем, что в устройстве демодуляции фазомодулированных сигналов по п.2 резистивный четырехполюсник выполнен в виде двух каскадно-соединенных  -образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4, двухполюсников, составляющих второе -образное соединение, выбраны с помощью следующих математических выражений:
-образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4, двухполюсников, составляющих второе -образное соединение, выбраны с помощью следующих математических выражений:
где α, β, γ, a и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r4 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r3.
5. Указанный результат достигается тем, что в устройстве демодуляции фазомодулированных сигналов по п.2 резистивный четырехполюсник выполнен в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников, резистивные сопротивления r1, r2, r3, двухполюсников, составляющих П-образное соединение, и резистивные сопротивления r4, r5 двухполюсников, составляющих -образное соединение, выбраны с помощью следующих математических выражений:
 ;
;  ;
;

где α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значения сопротивлений r3 и r5 выбираются из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
6. Указанный результат достигается тем, что в устройстве демодуляции фазомодулированных сигналов по п.2 резистивный четырехполюсник выполнен в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников, резистивные сопротивления r1, r2, r3, r4 двухполюсников, составляющих перекрытое Т-образное соединение, выбраны с помощью следующих математических выражений:
 ;
;  ;
;
 ,
,
где  ; α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r3 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
; α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r3 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
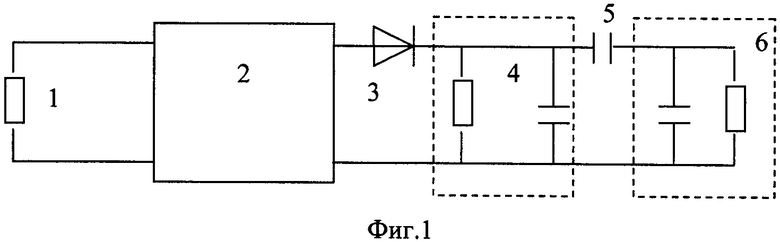
На фиг.1 показана схема устройства демодуляции фазомодулированных радиочастотных сигналов (прототип).
На фиг.2 показана структурная схема предлагаемого устройства по п.2.
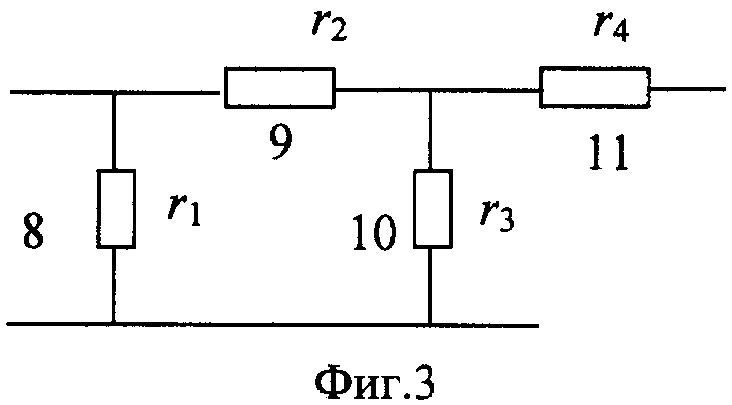
На фиг.3 приведена схема четырехполюсника по п.3, входящая в предлагаемое устройство.
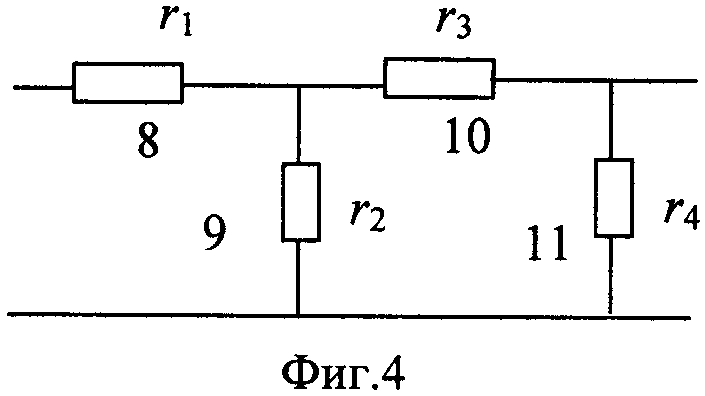
На фиг.4 приведена схема четырехполюсника по п.4, входящая в предлагаемое устройство.
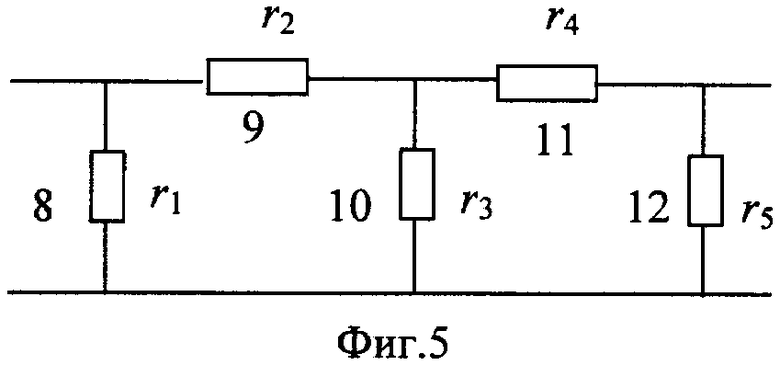
На фиг.5 приведена схема четырехполюсника по п.5, входящая в предлагаемое устройство.
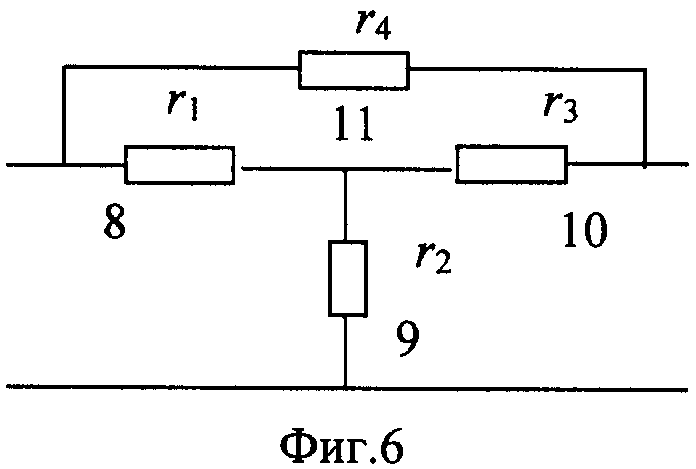
На фиг.6 приведена схема четырехполюсника по п.6, входящая в предлагаемое устройство.
Устройство-прототип содержит источник 1 фазомодулированных сигналов, четырехполюсник 2, нелинейный элемент 3, фильтр нижних частот 4 на элементах R, C, разделительную емкость 5 на элементе Ср и низкочастотную нагрузку 6 на элементах Rн, Сн.
Принцип действия устройства демодуляции фазомодулированных сигналов (прототипа) состоит в следующем.
Фазомодулированный сигнал от источника 1 подают на демодулятор из последовательно включенного полупроводникового диода к фильтру нижних частот. Принцип действия устройства, реализующего этот способ, состоит в том, что с помощью реактивного четырехполюсника 2, представляющего собой параллельный колебательный контур и включенного между источником ФМС и нелинейным элементом, преобразовывают ФМС в АФМС, с помощью нелинейного элемента 3 разрушается спектр АФМС на высокочастотные и низкочастотные составляющие. Последние выделяются с помощью фильтра нижних частот 4 и поступают в низкочастотную нагрузку 6. В качестве нагрузки выбирается дифференцирующая цепь, если входной ФМС подан на правый склон АЧХ контура или в качестве нагрузки выбирается интегрирующая цепь, если входной ФМС подан на левый склон АЧХ контура. Разделительная емкость 5 устраняет постоянную составляющую. В результате на выходе устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения огибающей входного высокочастотного амплитудно-модулированного колебания.
Недостаток способа и устройства его реализации состоит в том, что при прохождении ФМС через указанную цепь, после преобразования ФМС в АФМС, глубина амплитудной модуляции последнего является незначительной. Это связано с большой шириной спектра ФМС, т.е. с малой добротностью контура. С другой стороны, чем уже полоса пропускания контура, тем большим искажениям подвергается принятый сигнал.
Высокочастотная часть структурной схемы обобщенного предлагаемого устройства по п.2 (фиг.2) состоит из каскадно-соединенных источника ФМС 1, трехполюсного нелинейного элемента 3, резистивного четырехполюсника 2 и высокочастотной нагрузки 7. Низкочастотная часть структурной схемы содержит фильтр нижних частот 4, разделительную емкость 5 и низкочастотную нагрузку 6.
Принцип действия данного устройства состоит в том, что при подаче ФМС от источника 1 с сопротивлением z0 в результате специального выбора значений параметров классической матрицы передачи четырехполюсника 2 из условий обеспечения заданной глубины амплитудной модуляции АФМС, преобразованного из входного ФМС на левом или правом склоне зависимости модуля одного из комплексных элементов матрицы проводимостей нелинейного элемента от частоты, после прохождения его через высокочастотную часть достигается минимум искажений входного сигнала. Одновременно спектр АФМС разрушается при помощи нелинейного элемента 3, включенного между источником ФМС и четырехполюсником по схеме с общим эмиттером, базой или коллектором, фильтр нижних частот 4 выделяет низкочастотную составляющую, постоянная составляющая устраняется с помощью разделительной емкости 5. Если выбран левый склон указанной зависимости, то в качестве низкочастотной нагрузки используют дифференцирующую цепь, а если выбран правый склон указанной зависимости, то в качестве низкочастотной нагрузки используют интегрирующую цепь.
В результате низкочастотное колебание, амплитуда которого изменяется по закону изменения фазы входного ФМС, выделяется на низкочастотной нагрузке 6.
Предлагаемое устройство демодуляции ФМС по п.3 отличается от устройства по п.2 тем, что резистивный четырехполюсник (фиг.3) выполнен в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников (резистивные сопротивления r1 (8), r2 (9) двухполюсников составляют первое Г-образное соединение, а резистивные сопротивления r3, (10), r4 (11) двухполюсников составляют второе Г-образное соединение). Сопротивления r2, r3, r4 определяются аналитически по найденным математическим выражениям однозначно. При этом значения этих сопротивлений функциональным образом зависят от произвольно выбираемого значения сопротивления r1 или выбираемого исходя из каких-либо других физических соображений. В предлагаемом изобретении значение сопротивления r1 выбирается из условий обеспечения физически реализуемых значений r2, r3, r4. Значения модуля коэффициента передачи в первом состоянии выбираются из условия обеспечения физической реализуемости четырехполюсника. Значения сопротивлений r2, r3, r4 двухполюсников 9, 10, 11, кроме того, зависят от оптимальных значений элементов матрицы передачи четырехполюсника и заданных комплексных сопротивлений источника сигнала и нагрузки. Принцип действия этого устройства аналогичен принципу действия устройства по п.2.
Предлагаемое устройство демодуляции ФМС по п.4 отличается от устройства по п.2 тем, что резистивный четырехполюсник (фиг.4) выполнен в виде двух каскадно-соединенных -образных соединений четырех резистивных двухполюсников (резистивные сопротивления r1, r2 двухполюсников составляют первое -образное соединение, а резистивные сопротивления r3, r4 двухполюсников составляют второе -образное соединение). Принцип действия этого устройства аналогичен принципу действия устройства по п.2.
Предлагаемое устройство демодуляции ФМС по п.5 отличается от устройства по п.2 тем, что резистивный четырехполюсник (фиг.5) выполнен в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников (резистивные сопротивления r1, r2, r3 двухполюсников составляют П-образное соединение, а резистивные сопротивления r4, r5 двухполюсников составляют -образное соединение). Принцип действия этого устройства аналогичен принципу действия устройства по п.2.
Предлагаемое устройство демодуляции ФМС по п.6 отличается от устройства по п.2 тем, что резистивный четырехполюсник (фиг.6) выполнен в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников с сопротивлениями r1, r2, r3, r4. Принцип действия этого устройства аналогичен принципу действия устройства по п.2.
Анализ условий физической реализуемости указанных четырех вариантов выполнения резистивного четырехполюсника (фиг.3-6) предлагаемого устройства (фиг.2) показывает, что из этого количества вариантов при произвольных заданных сопротивлений источника сигнала и нагрузки всегда найдется такой вариант, что значения резистивных сопротивлений этого четырехполюсника, рассчитанные по вышеприведенным формулам, будут положительными, то есть физически реализуемыми. Наоборот, для каждого отдельно взятого варианта всегда найдутся такие значения сопротивлений источников сигнала и нагрузки, что значения резистивных сопротивлений четырехполюсников, рассчитанные по вышеприведенным формулам, окажутся физически реализуемыми.
Докажем возможность реализации указанных свойств.
Пусть на вход демодулятора воздействуют фазомодулированное колебание  где Uн, ωн - амплитуда и частота несущего высокочастотного колебания; mϕ - индекс фазовой модуляции; ϕo - начальная фаза; Ω - частота первичного информационного низкочастотного сигнала. Поскольку частота определяется производной от фазы, то одновременно с изменением фазы в фазомодулированном колебании будет происходить изменение частоты по следующему закону:
где Uн, ωн - амплитуда и частота несущего высокочастотного колебания; mϕ - индекс фазовой модуляции; ϕo - начальная фаза; Ω - частота первичного информационного низкочастотного сигнала. Поскольку частота определяется производной от фазы, то одновременно с изменением фазы в фазомодулированном колебании будет происходить изменение частоты по следующему закону:  Поэтому, если ФМС подать на правый склон зависимости одного из комплексных элементов матрицы проводимостей нелинейного элемента, включенного между источником сигнала и четырехполюсником, от частоты, то произойдет преобразование ФМС в АФМС. При этом амплитуда АФМС будет изменяться по закону (минус sin( Ωt)). Следовательно, для того чтобы закон изменения амплитуды АФМС повторял закон изменения фазы ФМС, необходимо проинтегрировать преобразованный сигнал, т.е. подать на интегрирующую цепь. Если ФМС подать на левый склон зависимости одного из комплексных элементов матрицы проводимостей нелинейного элемента, включенного между источником сигнала и четырехполюсником, от частоты, то также произойдет преобразование ФМС в АФМС. При этом амплитуда АФМС будет изменяться по закону (sin( Ωt)). Следовательно, для того чтобы закон изменения амплитуды АФМС повторял закон изменения фазы ФМС, необходимо продифференцировать преобразованный сигнал, т.е. подать на дифференцирующую цепь. Из анализа этих зависимостей следует, что положение левого и правого склона можно изменять по частотной оси путем изменения постоянного напряжения смещения. Кроме того, это возможно путем параллельного подключения емкости или последовательно индуктивности к нелинейному элементу. Изменение положения склонов возможно также путем выбора типа нелинейного элемента. Выбор осуществляется таким образом, что левый или правый склоны зависимости одного из комплексных элементов матрицы проводимостей от частоты совпадает с частотой несущего колебания фазомодулированных сигналов.
Поэтому, если ФМС подать на правый склон зависимости одного из комплексных элементов матрицы проводимостей нелинейного элемента, включенного между источником сигнала и четырехполюсником, от частоты, то произойдет преобразование ФМС в АФМС. При этом амплитуда АФМС будет изменяться по закону (минус sin( Ωt)). Следовательно, для того чтобы закон изменения амплитуды АФМС повторял закон изменения фазы ФМС, необходимо проинтегрировать преобразованный сигнал, т.е. подать на интегрирующую цепь. Если ФМС подать на левый склон зависимости одного из комплексных элементов матрицы проводимостей нелинейного элемента, включенного между источником сигнала и четырехполюсником, от частоты, то также произойдет преобразование ФМС в АФМС. При этом амплитуда АФМС будет изменяться по закону (sin( Ωt)). Следовательно, для того чтобы закон изменения амплитуды АФМС повторял закон изменения фазы ФМС, необходимо продифференцировать преобразованный сигнал, т.е. подать на дифференцирующую цепь. Из анализа этих зависимостей следует, что положение левого и правого склона можно изменять по частотной оси путем изменения постоянного напряжения смещения. Кроме того, это возможно путем параллельного подключения емкости или последовательно индуктивности к нелинейному элементу. Изменение положения склонов возможно также путем выбора типа нелинейного элемента. Выбор осуществляется таким образом, что левый или правый склоны зависимости одного из комплексных элементов матрицы проводимостей от частоты совпадает с частотой несущего колебания фазомодулированных сигналов.
Входной модулированный высокочастотный сигнал Sвх и преобразованный с помощью демодулятора высокочастотный сигнал (до фильтра нижних частот) Sвых связаны между собой следующим образом: Sвых=S21Sвх, где под входным и выходным сигналами подразумевается входное и выходное напряжения; S21 - коэффициент передачи.
Рассмотрим фазомодулированные колебания в двух состояниях, характеризуемых крайними значениями диапазона изменения амплитуды АФМС на нелинейном элементе.
Запишем указанные физические величины в двух состояниях в комплексной форме  ;
;  (модуль АФМС в двух состояниях различен);
(модуль АФМС в двух состояниях различен);  . Таким образом на выходе высокочастотной части демодулятора модули коэффициента передачи и входного сигнала перемножаются, а их фазы складываются. Выходные напряжения в двух состояниях связаны между собой следующим образом:
. Таким образом на выходе высокочастотной части демодулятора модули коэффициента передачи и входного сигнала перемножаются, а их фазы складываются. Выходные напряжения в двух состояниях связаны между собой следующим образом:

Поскольку модуль входного ФМС не зависит от изменения его фазы и частоты, то введем обозначение  . Для уменьшения фазовых искажений целесообразно положить
. Для уменьшения фазовых искажений целесообразно положить  .
.
Введем обозначения: 
 Отношение модулей коэффициентов передачи высокочастотной части демодулятора m21 связано с глубиной амплитудной модуляции АФМС следующим образом:
Отношение модулей коэффициентов передачи высокочастотной части демодулятора m21 связано с глубиной амплитудной модуляции АФМС следующим образом:
 , при m1>m2 или
, при m1>m2 или  , при m1<m2;
, при m1<m2;  и
и  - это модули коэффициентов передачи высокочастотной части демодулятора в первом и втором состояниях;
- это модули коэффициентов передачи высокочастотной части демодулятора в первом и втором состояниях;  - фазы входного ФМС в двух крайних его состояниях.
- фазы входного ФМС в двух крайних его состояниях.
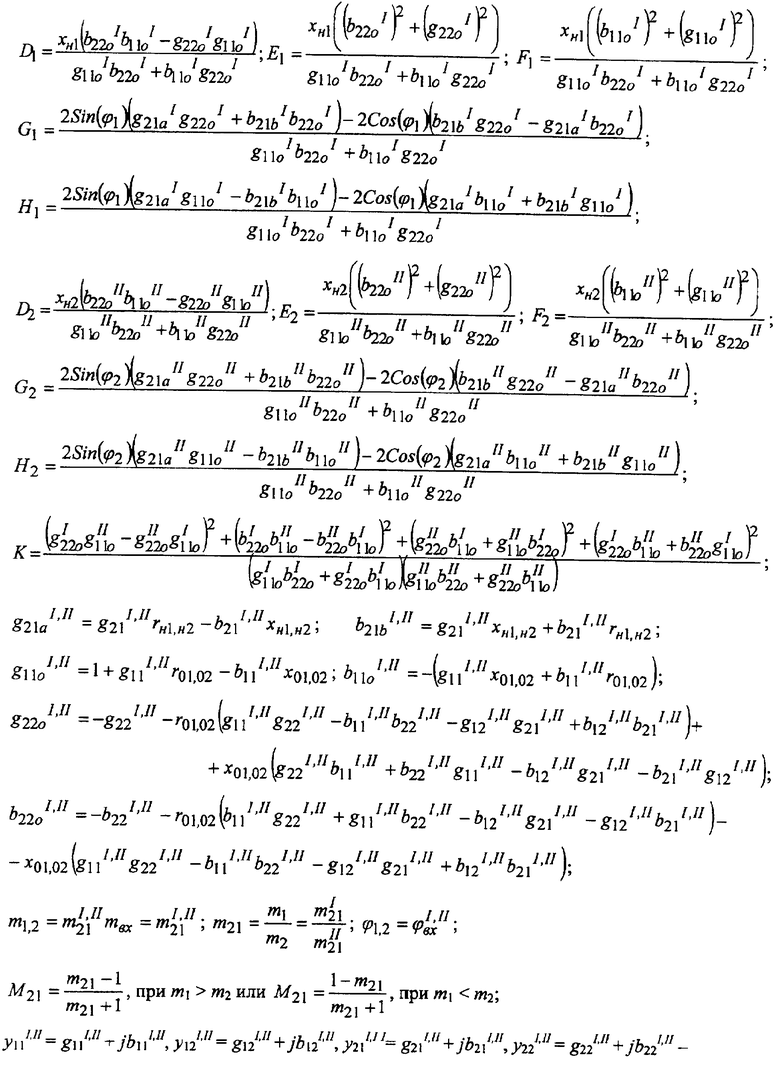
Если частота несущего колебания выбрана указанным выше образом или, наоборот, положение левого или правого склона выбрано указанным образом, то в этих двух крайних состояниях, соответствующих крайним значениям амплитуды АФМС, которым соответствуют крайние значения частоты АФМС, нелинейный элемент принимает два значения комплексной проводимости y1,2=g1,2+jb1,2. Пусть, кроме того, комплексные сопротивления высокочастотной нагрузки zн1,н2=rн1,н2+jxн1,н2 и источника сигнала z01,02=r01,02+jx01,02 на крайних значениях частоты АФМС известны.
Также известны матрицы проводимостей  транзистора в двух состояниях:
транзистора в двух состояниях:

где 
Матрице проводимостей (2) соответствует классическая матрица передачи [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с.]:
где 
Резистивный четырехполюсник описывается матрицей передачи:
где 

 а, b, с, d - элементы классической матрицы передачи [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с.].
а, b, с, d - элементы классической матрицы передачи [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с.].
Эквивалентная схема демодулятора представляется в виде четырех каскадно-соединенных четырехполюсников (фиг.2).
Общая нормированная классическая матрица передачи демодулятора имеет вид

Используя известную связь элементов матрицы рассеяния [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с.], получим выражение для коэффициента передачи высокочастотной части демодулятора  в двух состояниях транзистора:
в двух состояниях транзистора:
Пусть требуется определить схему резистивного четырехполюсника и значения параметров резистивных элементов двухполюсников, входящих в него, при которых можно обеспечить заданный закон изменения коэффициента передачи (1) при принятых обозначениях.
Подставим (6) в выражение (1) и, разделив между собой действительную и мнимую части, получим для первого состояния, определяемого одним из крайних значений амплитуды и соответствующей крайней частотой АФМС, систему двух уравнений:
После денормировки коэффициента передачи (6) путем умножения на  последнее выражение изменяется а1=rн1; b1=xн1:
последнее выражение изменяется а1=rн1; b1=xн1:
 ;
; 
Денормированный коэффициент передачи связан с физически реализуемой передаточной функцией следующим образом:  .
.
Решение системы (7) имеет вид взаимосвязей между элементами классической матрицы передачи четырехполюсника
 ;
; 
где  ;
;

 ;
;  ;
;  ;
;
Проводя аналогичные рассуждения для второго состояния, определяемого другим крайним значением амплитуды и соответствующей крайним значением частоты АФМС, получим следующие взаимосвязи между элементами классической матрицы передачи четырехполюсника:
 ;
; 
где 

 ;
;  ;
;  ;
;
 ;
; 
Поскольку элементы матрицы передачи четырехполюсника (8) и (9) описывают один и тот же четырехполюсник, то указанные выражения должны быть попарно равны. Из этих равенств вытекает, что все оставшиеся свободные в (8) и (9) элементы матрицы передачи должны определяться с помощью следующих выражений:
Величина К имеет физический смысл частотного качества или добротности нелинейного элемента с учетом сопротивлений источника сигнала на двух частотах. Частотные качества определяют меру различия элементов матрицы проводимостей нелинейного элемента на двух частотах.
Анализ показывает, что элементы резистивного четырехполюсника должны определяться из решения системы уравнений - (8) или (9) и (10). Таким образом, все четыре элемента матрицы передачи четырехполюсника оказываются строго заданными. Для того чтобы они определяли физически реализуемый четырехполюсник, должно выполняться свойство взаимности четырехполюсника [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с.], которое в наших обозначениях имеет вид a2(α-βγ)=1, из которого следуют ограничения на величину модуля коэффициента передачи в первом состоянии управляемого элемента:

 .
.
Использованные условия описывают свойство взаимности. Поэтому достаточно выполнения любых трех из четырех уравнений. Четвертое уравнение оказывается зависимым от остальных.
Таким образом, количество резистивных двухполюсников, из которых формируется четырехполюсник, должно быть равным не менее трем. Значения параметров этих двухполюсников определяются путем решения любых трех уравнений из указанных четырех уравнений. При этих значениях параметров в первом состоянии будут реализованы значение m1 (11), а во втором состоянии - заданное значение m2. В результате будут реализованы требуемые уровни амплитуды АФМС в двух состояниях, что способствует повышению помехоустойчивости приемника. Необходимо отметить, что в случае равенства частотного качества нелинейного элемента частотному качеству нагрузки число необходимых параметров уменьшается на единицу. Частотное качество нагрузки определяется следующим образом:

Данный случай является частным и здесь не рассматривается.
В соответствии с указанным алгоритмом были синтезированы (определены выражения для оптимальных значений сопротивлений резистивных двухполюсников) простейшие схемы четырехполюсника из не менее, чем трех резисторов. Матрицы передачи исследуемых четырехполюсников получены из работы [Гуревич И.В. Основы расчета радиотехнических цепей (линейные цепи при гармонических воздействиях). М.: Связь, 1975, 30-34 с.].
Для схемы в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников (фиг.3):
; ; 
Свободно выбираемое сопротивление r1 обеспечивает физическую реализуемость сопротивлений r2, r3, r4, т.е. их положительность.
Для схемы в виде двух каскадно-соединенных -образных соединений четырех резистивных двухполюсников (фиг.4):
Свободно выбираемое сопротивление r4 обеспечивает физическую реализуемость сопротивлений r1, r2, r3, т.е. их положительность.
Для схемы в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников (фиг.5)
; 
.
Свободно выбираемые сопротивления r3, r5 обеспечивают физическую реализуемость сопротивлений r1, r2, r4, т.е. их положительность.
Для схемы в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников (фиг.6)
; 
, где  .
.
Свободно выбираемое сопротивление r3 обеспечивает физическую реализуемость сопротивлений r1, r2, r4, т.е. их положительность.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестно устройство демодуляции ФМС, обеспечивающее заданные уровни амплитуды АФМС в двух крайних состояниях, соответствующих крайним значениям частоты ФМС и состоящее из нелинейного трехполюсного элемента, включенного между источником сигнала и входом резистивного четырехполюсника по схеме с общим эмиттером, базой или коллектором, причем четырехполюсник выполнен в виде двух каскадно-соединенных Г-образных соединений четырех резистивных двухполюсников (в виде двух каскадно-соединенных -образных соединений четырех резистивных двухполюсников, в виде двух каскадно-соединенных П-образного соединения трех резистивных двухполюсников и -образного соединения двух резистивных двухполюсников, в виде несимметричного перекрытого Т-образного соединения четырех резистивных двухполюсников), параметры которых определены по соответствующим математическим выражениям. При этом значение модуля коэффициента передачи в первом состоянии выбрано оптимальным по критерию обеспечения физической реализуемости. В обеих состояниях нелинейного элемента значения модулей коэффициентов передачи контролируются.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (выполнение четырехполюсника резистивным в виде четырех указанных выше схем с выбором значений их параметров из условия обеспечения заданных уровней амплитуды АФМС в двух состояниях, соответствующих крайним значениям частоты ФМС, осуществляет преобразование ФМС в АФМС без наличия источника опорного сигнала и колебательного контура.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые транзисторы и резисторы, сформированные в заявленную схему резистивного четырехполюсника в виде перечисленных схем соединения двухполюсников. Значения параметров резисторов однозначно могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенного устройства заключается в одновременном обеспечении заданных значений модулей коэффициентов передачи демодулятора в двух состояниях нелинейного элемента, соответствующих крайним значениям частоты ФМС, что способствует достижению требуемых значений амплитуд АФМС в указанных состояниях, т.е. повышению помехоустойчивости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341879C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341883C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2341880C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341884C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2341889C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341882C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341888C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341886C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341887C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341890C1 |
Изобретение относится к радиосвязи для демодуляции (ДМ) фазоманипулированных и фазомодулированных (ФМ) сигналов. Технический результат заключается в обеспечении ДМ ФМ-сигналов, без использования генератора опорных колебаний и параллельного колебательного контура, с преобразованием ФМ в амплитудно-фазомодулированные (АФМ) сигналы с помощью высокочастотной (ВЧ) части ДМ при заданной глубине AM АФМ-сигналов на ВЧ-нагрузке, что повышает помехоустойчивость приемника. В способе и устройстве ДМ включают между источником РЧ ФМ-сигналов и низкочастотной (НЧ) нагрузкой и выполняют его из четырехполюсника (ЧП), нелинейного элемента (НЭ), фильтра нижних частот (ФНЧ). ФМ-сигнал преобразовывают в АФМ-сигнал, с помощью НЭ разрушают спектр АФМ-сигнала на ВЧ- и НЧ-составляющие. В качестве НЭ используют трехполюсный элемент, который включают между источником РЧ ФМ-сигналов и ЧП или между ЧП и введенной ВЧ-нагрузкой. ЧП выполняют из числа резистивных двухполюсников, не меньшего трех, параметры которых выбраны из условия требуемых значений амплитуд в двух состояниях и глубины амплитудной модуляции АФМ-сигнала. Преобразование ФМ в АФМ-сигнал осуществляют подачей ФМ-сигнала на правый склон зависимости модуля одного из комплексных элементов матрицы сопротивлений или проводимостей НЭ от частоты, либо на левый склон зависимости сопротивлений или проводимостей. 2 н. и 4 з.п. ф-лы, 6 ил.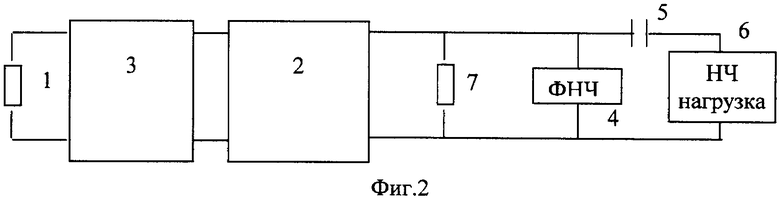
заданные элементы матрицы проводимости управляемого трехполюсного элемента в двух состояниях (I и I), определяемых двумя крайними значениями частоты входного фазомодулированного сигнала;  - значения модулей коэффициента передачи высокочастотной части демодулятора в двух состояниях входного сигнала, характеризуемых двумя крайними значениями частоты фазомодулированного сигнала; mвх - постоянное значение модуля входного сигнала;
- значения модулей коэффициента передачи высокочастотной части демодулятора в двух состояниях входного сигнала, характеризуемых двумя крайними значениями частоты фазомодулированного сигнала; mвх - постоянное значение модуля входного сигнала;  - значения фаз входного сигнала в двух его состояниях, характеризуемых двумя крайними значениями частоты фазомодулированного сигнала; m21, М21 - отношение модулей коэффициентов передачи высокочастотной части демодулятора в двух состояниях входного сигнала и глубина амплитудной модуляции амплитудно-фазомодулированного сигнала; zн1,н2=rн1,н2+jxн1,н2, z01,02=r01,02+jx01,02 - заданные комплексные сопротивления высокочастотной нагрузки и источника фазомодулированного сигнала в двух его состояниях.
- значения фаз входного сигнала в двух его состояниях, характеризуемых двумя крайними значениями частоты фазомодулированного сигнала; m21, М21 - отношение модулей коэффициентов передачи высокочастотной части демодулятора в двух состояниях входного сигнала и глубина амплитудной модуляции амплитудно-фазомодулированного сигнала; zн1,н2=rн1,н2+jxн1,н2, z01,02=r01,02+jx01,02 - заданные комплексные сопротивления высокочастотной нагрузки и источника фазомодулированного сигнала в двух его состояниях.

где α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r1 выбирается из условия обеспечения физической реализуемости сопротивлений r2, r3, r4.
 -образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе -образное соединение, выбраны с помощью следующих математических выражений:
-образных соединений четырех резистивных двухполюсников, резистивные сопротивления r1, r2 двухполюсников, составляющих первое -образное соединение, и резистивные сопротивления r3, r4 двухполюсников, составляющих второе -образное соединение, выбраны с помощью следующих математических выражений:
где α, β, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значение сопротивления r4 выбирается из условия обеспечения физической реализуемости сопротивлений r1, r2, r3.
-образного соединения двух резистивных двухполюсников, резистивные сопротивления r1, r2, r3, двухполюсников, составляющих П-образное соединение, и резистивные сопротивления r4, r5 двухполюсников, составляющих -образное соединение, выбраны с помощью следующих математических выражений:
где α, γ, а и остальные обозначения имеют тот же смысл, что и в п.2; значения сопротивлений r3, и r5 выбираются из условия обеспечения физической реализуемости сопротивлений r1, r2, r4.
| БУГА Н.Н | |||
| и др | |||
| Радиоприемные устройства | |||
| - М.: Радио и связь, 1986, 145 | |||
| Селективный фазовый детектор | 1984 |
|
SU1401557A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
| БАСКАКОВ С.И | |||
| Радиотехнические цепи и сигналы | |||
| - М.: Высшая школа, 1988, с.291 | |||
| ГОЛОВКОВ А.А | |||
| и др | |||
| Взаимосвязи между элементами матрицы сопротивлений и их использование для синтеза согласующе-фильтрующих устройств амплитудно-фазовых манипуляторов | |||
| - Телекоммуникации, 2004, №8, с.29-32. | |||

