Изобретение относится к вычислительной технике, в частности к устройствам контроля. Оно может быть использовано в научных исследованиях и практике эксплуатации для определения оптимальных сроков обслуживания средств технических комплексов и систем.
Существует ряд работ, в том числе [1, 2, 3], в которых рассматриваются различные стратегии обслуживания изделий и систем. Предложенные в них подходы не доведены до алгоритмов и устройств, обеспечивающих их практическое применение без соответствующих доработок. Известны устройства [4, 5], позволяющие вычислять оптимальные по критерию готовности периоды технического обслуживания изделий, не входящих непосредственно в состав сложной системы. Причем устройство [4] ориентировано на изделия, для которых не предусматривается плановая предупредительная профилактика. Устройство [5] применимо только для изделий с ограниченным материальным ресурсом жизнедеятельности, например энергоресурсом.
Известно также устройство [6], обеспечивающее определение оптимального периода обслуживания сложной системы, реализуя минимаксный критерий. При этом все подсистемы, входящие в сложную систему, должны обслуживаться с одинаковой периодичностью, соответствующей оптимальному периоду самой ненадежной подсистемы. Данное устройство целесообразно применять для системы, подсистемы которой близки по надежности. Если же система состоит из подсистем, существенно отличающихся по надежности, то обслуживание их с одинаковой периодичностью, вычисленной устройством [6], не позволит рационально использовать надежностный потенциал остальных более надежных подсистем. Из этого следует, что область применения [6] ограничена.
Устройства [7, 8] предназначены для определения оптимальных значений периода технического обслуживания, обеспечивающих максимум коэффициента готовности изделия. Отметим, что в устройство [8], наряду с некоторой совокупностью функциональных блоков, включено устройство [7] в полном объеме. В связи с этим наиболее близким по технической сущности к заявляемому изобретению следует считать устройство [8], содержащее шесть блоков умножения, два сумматора, два блока деления, блок нелинейности, интегратор, датчик времени, три элемента задержки, три элемента памяти, три ключа, ждущий мультивибратор, компаратор. Недостатками устройства являются ограниченные функциональные возможности и область применения, т.к. его применение ориентировано на обособленные изделия, непосредственно не входящие в сложную систему, и не предназначено для определения временных программ обслуживания таких систем.
Целью заявляемого технического решения является расширение функциональных возможностей и области применения устройства. Цель достигается путем реализации математической модели, позволяющей определять временную программу обслуживания системы, обеспечивающую оптимальную периодичность обслуживания каждой из подсистем и системы в целом.
Система, как известно, включает в себя совокупность средств (элементов), находящихся в отношениях и связях друг с другом, образующих определенную целостность, единство. Примером технической системы является система управления воздушным движением. Функциональными элементами этой системы являются: радиотехнический комплекс, аппаратура передачи данных, информационно-вычислительный комплекс, комплекс средств отображения информации и др. Количественные показатели надежности и ремонтопригодности средств системы различны. Поэтому и оптимальные сроки их обслуживания разные. Определение оптимальных программ обслуживания подобных систем является актуальной задачей.
Процесс обслуживания имеет периодический характер. Длительность цикла обслуживания в общем случае может быть представлена в следующем виде:

где
τ - период обслуживания;
τk - средняя продолжительность контроля состояния;
τn - средняя продолжительность предупредительной профилактики;
τв - средняя продолжительность аварийно-восстановительных работ;
Р(τ) - вероятность безотказной работы средства на периоде τ.
Считаем, что фактическое состояние средства выявляется в плановые сеансы контроля. В связи с этим имеет место следующее соотношение:

где
τф - среднее время работоспособного состояния;
τо - среднее время нахождения изделия в отказе.
Время работоспособного состояния средства на периоде обслуживания определяется так

Организация эксплуатации средств предусматривает определение рациональных или оптимальных в некотором смысле сроков технического обслуживания, обеспечивающих требуемое качество функционирования этих средств.
Важным показателем качества функционирования является коэффициент готовности. Его значение может быть вычислено с помощью соотношения
 или
или

Анализ функции Кг (τ) показывает, что при τ→0 и при τ→∞, Кг (τ)→0. Существует период технического обслуживания, при котором коэффициент готовности достигает максимального значения КГ *. Задачу определения оптимального периода обслуживания средства запишем в следующем виде:

Рассмотренный подход целесообразно использовать применительно к отдельным, функционально обособленным средствам. Однако, наряду с такими средствами, широкое применение получили технические комплексы, включающие в себя множество различных по структуре, сложности и надежности средств. Каждому из этих средств будет соответствовать свой оптимальный период τ* i технического обслуживания. Множество вычисленных значений τ* i, соответствующее множеству средств комплекса  могут образовать во времени такую совокупность циклов обслуживания, что практическая ее реализация окажется нерациональной либо невозможной. Поэтому возникает необходимость упорядочивания этой совокупности путем нахождения компромиссных, близких к оптимальным, значений периодов обслуживания для всех средств комплекса. Такой компромисс является отражением решающего правила, которое вводится неформально и определяет собой допустимое отклонение значений периодов обслуживания средств от оптимальных τ* i значений. Конструктивным с точки зрения упорядочивания сроков обслуживания разнонадежных средств комплекса является кратность периодов их обслуживания. Различные средства комплекса (или группы средств) будут обслуживаться с различной периодичностью: {τр, 2 τр,...mτp}, где τр - расчетное (вычисленное) значение периода обслуживания наименее надежного средства; m - количество разнонадежных средств (групп средств) комплекса.
могут образовать во времени такую совокупность циклов обслуживания, что практическая ее реализация окажется нерациональной либо невозможной. Поэтому возникает необходимость упорядочивания этой совокупности путем нахождения компромиссных, близких к оптимальным, значений периодов обслуживания для всех средств комплекса. Такой компромисс является отражением решающего правила, которое вводится неформально и определяет собой допустимое отклонение значений периодов обслуживания средств от оптимальных τ* i значений. Конструктивным с точки зрения упорядочивания сроков обслуживания разнонадежных средств комплекса является кратность периодов их обслуживания. Различные средства комплекса (или группы средств) будут обслуживаться с различной периодичностью: {τр, 2 τр,...mτp}, где τр - расчетное (вычисленное) значение периода обслуживания наименее надежного средства; m - количество разнонадежных средств (групп средств) комплекса.
Начало каждого интервала времени kτp,  будет соответствовать началу цикла обслуживания одного или нескольких близких по надежности средств комплекса. Отдельное средство комплекса Si будет обслуживаться с периодом kiτp, достаточно близким к τ* i.
будет соответствовать началу цикла обслуживания одного или нескольких близких по надежности средств комплекса. Отдельное средство комплекса Si будет обслуживаться с периодом kiτp, достаточно близким к τ* i.
Решающее правило заключается в том, чтобы обеспечивалась кратность периодов обслуживания средств комплекса τi=kiτp и выполнялось условие

Это условие трансформируется в выбор некоторого допустимого значения коэффициента готовности Кгi д, которое обеспечивает выполнение требования минимизации (6) и определяет границы допустимого значения τi д периода обслуживания средства. Значение τi д определяется исходя из того, что коэффициент готовности каждого средства будет равен некоторому допустимому значению, т.е. Кгi=Кгi д. На фиг.1 в качестве примера показаны результаты численного эксперимента зависимости Кг(τ) для двух разнонадежных средств.
Из данного примера видно, что некоторое отклонение Кгi от максимального Кгi * позволяет расширить область допустимых значений τi д периода обслуживания. Значение Кгi д можно определить как некоторую часть 0≤μ<1 от максимального значения, т.е. Кгi д=μ Кгi *. При этом τi д не ограничивается только τi * оптимальным значением, а будет находиться в интервале τнi<τi д<τконi, где τнi=τi *-Δτli, τконi=τi *+Δτ2i. Это позволяет определить конкретные (вычислительные) значения периодов обслуживания τi выч=τi средств комплекса, обеспечивающие функционирование этих средств с максимально возможными коэффициентами готовности Кгi выч≥Кгi д. Отметим, что предпочтительной для решения поставленной задачи является область значений периода τi, ограниченная оптимальным значением τi * и максимально допустимым τконi, то есть τi *<τi<τконi. В этой области достигается требуемая готовность при большей периодичности обслуживания и, следовательно, при меньших затратах. Поскольку периоды обслуживания отдельных средств находятся из условия их кратности, то этим обеспечивается рациональное в организационном плане обслуживание комплекса средств в целом.
Предложенная модель может быть реализована аппаратурно с помощью предлагаемого устройства, схема которого показана на фиг.2.
Устройство содержит блок памяти 1, в который поступают исходные данные, первый 2 и второй 17 блоки умножения, первый 3, второй 4 и третий 6 сумматоры, блок нелинейности 5, реализующий функцию P(t), датчик времени 7, вырабатывающий значение времени Δτ, первый 18, второй 12 и третий 11 элементы задержки, блок сравнения 8, первый 9 и второй 16 блоки деления, ждущий мультивибратор 13, схему ИЛИ 20, элемент памяти 14, интегратор 10, ключ 15 и сдвиговый регистр 19, обеспечивающий считывание исходных данных для каждой подсистемы.
Перед началом работы устройства исходная информация (значения входных величин): Кгi д, λi, τni-τвi, τki+τвi, τi * , τ* min заносятся в блок памяти 1 через его входы 2-7. Отметим, что блок памяти 1 разделен на n зон по возможному количеству подсистем сложной системы. Оптимальные значения τ* min=τр наименее ненадежной подсистемы комплекса и τi * остальных подсистем этого комплекса могут быть получены, используя прототип [8].
Устройство работает следующим образом.
По сигналу «Пуск», поступающему с первого входа устройства, сдвиговый регистр 19 обнуляется. Этот же сигнал, задержанный первым элементом задержки 18, пройдя через схему ИЛИ 20, устанавливает единицу в первом разряде сдвигового регистра 19, а также запускает датчик времени 7. По сигналу сдвигового регистра 19 считываются значения входных величин из блока памяти 1 на функциональные элементы устройства. Датчик времени 7 вырабатывает значение времени Δτ и передает на второй вход третьего сумматора 6, на первый вход которого с пятого выхода блока памяти поступает оптимальное значение периода обслуживания τ1 * первой из исследуемых подсистем. Результат сложения τ1 *+Δτ с выхода третьего сумматора 6 передается на вторые входы второго сумматора 4 и блока нелинейности 5, а также через третий элемент задержки 11 в элемент памяти 14. На первый вход второго сумматора 4 с четвертого выхода блока памяти 1 передается величина τk1+τв1, а с третьего выхода блока памяти 1 на первый вход блока нелинейности 5 поступает значение λ1. В блоке нелинейности 5 формируется сигнал Р(τ1 *+Δτ) и передается на первый вход интегратора 10 и на второй вход первого блока умножения 2. На первый вход первого блока умножения 2 со второго выхода блока памяти 1 поступает значение τn1-τв1. Сигнал, соответствующий величине Р(τ1 *+Δτ)(τn1-τв1), с выхода первого блока умножения 2 передается на первый вход первого сумматора 3. Значение (τ1 *+Δτ)+(τk1+τв1) с выхода второго сумматора 4 поступает на второй вход первого сумматора 3, в результате на его выходе формируется сигнал, соответствующий сумме Р(τ1 *+Δτ)(τn1-τв1)+(τ1 *+Δτ)+(τk1+τв1), и передается на второй вход первого блока деления 9. В то же время на первый вход блока деления 9 поступает сигнал

с выхода интегратора 10. В первом блоке деления 9 вычисляется значение коэффициента готовности в соответствии с (4) при τ=τ1 *+Δτ и передается на второй вход компаратора 8, на первый вход которого с первого выхода блока памяти 1 поступает значение Кг1 д.
В компараторе 8 сравниваются между собой его входные величины. Если окажется, что вычисленное значение Кг1(τ1 *+Δτ) больше Кг1 д, то, управляющий сигнал вырабатывается на первом выходе компаратора 8 и передается в датчик времени 7, в результате чего выходной сигнал датчика времени 7 увеличится на Δτ, т.е. он станет равным 2Δτ, и процесс вычисления значения Kг1 повторится, но при новом значении периода обслуживания, т.е. τ1=τ1 *+2Δτ. Цикл вычислений Kг1 будет повторяться с каждым m-м увеличением значения периода τ1=τ1 *+mΔτ до тех пор, пока будет сохраняться неравенство Kг1≥Кг1 д. Как только в компараторе 8 окажется, что вычисленное значение Kг1 меньше Kг1 д, на втором выходе компаратора 8 появится управляющий сигнал, который запустит ждущий мультивибратор 13. Управляющий сигнал с выхода мультивибратора 13 поступает на второй вход интегратора 10 и сбрасывает его значение в ноль, поступает также на второй вход элемента памяти 14 и открывает ключ 15. С выхода элемента памяти 14 значение τ1=τ1 *+Δτ* через ключ 15 поступает на второй вход второго блока деления 16, на первый вход которого поступает значение τ* min с шестого выхода блока памяти 1. Сигнал τ* min поступает также на первый вход блока умножения 17, а на второй его вход поступает сигнал с выхода второго блока деления 16, сформированный в результате целочисленного деления τ1 на τ* min. Таким образом, в блоке 17 формируется искомое значение τ1 выч. В то же время управляющий сигнал с выхода мультивибратора 13 через второй элемент задержки 12 поступает непосредственно на второй вход датчика времени 7, устанавливая его в состояние, соответствующее нулевому значению величины Δτ. Кроме того, выходной сигнал второго элемента задержки 12 через схему ИЛИ 20 одновременно запускает датчик времени 7 и переводит выходной сигнал сдвигового регистра 19 на один шаг, что обеспечивает считывание исходных данных из блока памяти 1 для второй подсистемы, и работа устройства повторяется, но уже с новыми значениями входных величин. Так будет происходить определение τi выч для всех подсистем.
После вычисления τi выч, соответствующего последней подсистеме исследуемой системы, работа устройства заканчивается.
Положительный эффект, который дает предлагаемое техническое решение, состоит в том, что устройство позволяет определять периоды технического обслуживания подсистем сложной системы, исходя из их кратности. Практическая реализация предложенного решения является более рациональной с точки зрения организации технического обслуживания системы и использования надежностных ресурсов подсистем.
Источники информации
1. Дружинин Г.В. Процессы технического обслуживания автоматизированных систем. - М.: Энергия, 1973.
2. Барзилович Е.Ю. Модели технического обслуживания сложных систем. - М.: Высшая школа, 1982.
3. Абраменко Б.С., Маслов А.Я., Немудрук Л.Н. Эксплуатация автоматизированных систем управления. МО СССР, 1984.
4. Гришин В.Д., Колесников К.Г., Тимофеев А.Н. А.С. СССР №1714636, М.кл.5 G07C 3/08. G06F 15/46, 1991.
5. Гришин В.Д., Тимофеев А.Н., Жиряков А.А. Патент РФ №2071118, М.кл.6 G07C 3/08, 1996.
6. Воробьев Г.Н., Гришин В.Д., Тимофеев А.Н. А.С. СССР №1679512, М.кл.5 G07C 3/08, 1991.
7. Воробьев Г.Н., Гришин В.Д., Тимофеев А.Н. А.С. СССР №1617453, М.кл.5 G07C 3/08, 1990.
8. Гришин В.Д., Мануйлов Ю.С., Щенев А.Н. Патент РФ N2228541, М.кл.7 G07С 3/08, 2004.
9. Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ ПРОГРАММЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ | 2007 |
|
RU2358320C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ПЕРИОДОВ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СРЕДСТВ СИСТЕМЫ | 2009 |
|
RU2429543C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2007 |
|
RU2343544C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ПРОГРАММ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СРЕДСТВ СИСТЕМЫ | 2009 |
|
RU2429542C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЙ ЭКСПЛУАТАЦИОННЫХ ХАРАКТЕРИСТИК ОБСЛУЖИВАЕМЫХ ИЗДЕЛИЙ | 2012 |
|
RU2525754C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2007 |
|
RU2361277C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2004 |
|
RU2279712C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СТРАТЕГИИ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СРЕДСТВ СИСТЕМЫ | 2014 |
|
RU2565890C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2015 |
|
RU2604437C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ СОСТОЯНИЕМ ИЗДЕЛИЯ | 2011 |
|
RU2479041C1 |

Изобретение относится к вычислительной технике, в частности к устройствам контроля, и может быть использовано в научных исследованиях и технике, где требуется определять оптимальную программу обслуживания технических средств, совокупность которых составляет единую систему. Техническим результатом является расширение функциональных возможностей и области применения устройства. Устройство содержит блок памяти, два блока умножения, три сумматора, блок нелинейности, датчик времени, компаратор, два блока деления, интегратор, три элемента задержки, мультивибратор, элемент памяти, ключ, сдвиговый регистр и схему ИЛИ. 2 ил.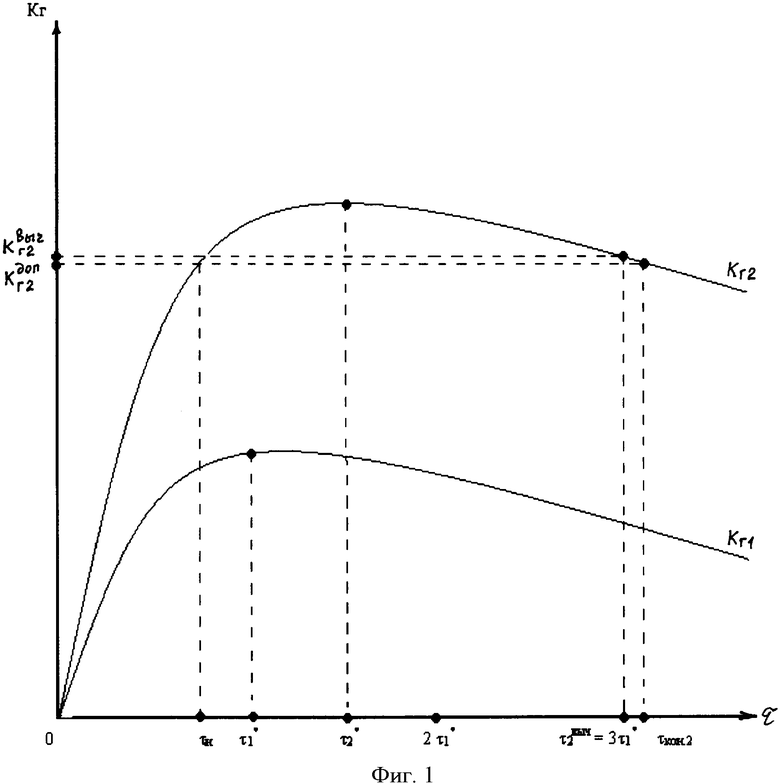
Устройство для определения оптимальных периодов технического обслуживания средств системы, содержащее датчик времени, второй и третий элементы задержки, блок памяти, второй сумматор, второй блок деления, выход которого через второй блок умножения соединен с выходом устройства, блок нелинейности, выход которого через интегратор связан с первым входом и через соединенные последовательно первый блок умножения и первый сумматор - со вторым входом первого блока деления, выход которого подключен ко второму входу компаратора, второй выход которого через мультивибратор соединен с управляющим входом элемента памяти и разрешающим входом ключа, информационный вход которого подключен к выходу элемента памяти, информационный вход которого соединен с выходом первого элемента задержки, отличающееся тем, что в него введены третий сумматор, схема ИЛИ и сдвиговый регистр, первый вход которого, являющийся первым входом устройства, на который подается сигнал «Пуск», соединен через третий элемент задержки с первым входом схемы ИЛИ, второй вход подключен к выходу схемы ИЛИ и ко второму входу датчика времени, а каждый из n выходов соединен индивидуально с соответствующим i-м (i=1, n) управляющим входом блока памяти, шесть информационных входов которого являются информационными входами устройства со второго по седьмой, первый выход блока памяти, на который поступает значение Кri Д, характеризующее допустимый коэффициент готовности i-го средства системы, подключен к первому входу компаратора, первый выход которого соединен с третьим входом датчика времени, первый вход которого связан непосредственно со вторым входом схемы ИЛИ и через второй элемент задержки - с выходом мультивибратора, а выход соединен со вторым входом третьего сумматора, первый вход которого подключен к пятому выходу блока памяти, на который поступает значение τi *, характеризующее оптимальный период технического обслуживания i-го средства системы, а выход - к входу первого элемента задержки, ко второму входу блока нелинейности и ко второму входу второго сумматора, выход которого соединен со вторым входом первого сумматора, а первый вход - с четвертым выходом блока памяти, на который поступает значение τki+τвi, характеризующее сумму средней продолжительности контроля состояния и средней продолжительности аварийно-восстановительных работ i-го средства системы, третий выход блока памяти, на который поступает значение λi, характеризующее интенсивность отказов i-го средства системы, подключен к первому входу блока нелинейности, второй выход блока памяти, на который поступает значение τni-τвi, характеризующее разницу между средней продолжительностью предупредительной профилактики и средней продолжительностью аварийно-восстановительных работ i-го средства системы, подключен к первому входу первого блока умножения, шестой выход блока памяти, на который поступает значение τ* min, характеризующее оптимальный период технического обслуживания наименее ненадежного средства системы, соединен с первыми входами второго блока умножения и второго блока деления, второй вход которого соединен с выходом ключа, разрешающий вход которого связан с управляющим входом интегратора.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2001 |
|
RU2228541C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2004 |
|
RU2279712C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2001 |
|
RU2206123C2 |
| Устройство для определения оптимального периода технического обслуживания изделия | 1988 |
|
SU1617453A1 |
| DE 3121461 A1, 16.12.1982 | |||
| Дождевальная машина для прецизионного орошения | 2023 |
|
RU2814260C1 |

