Изобретение относится к способам и устройствам для определения распределения радиоактивного препарата внутри исследуемого объекта и может быть использовано в медицинской диагностике и методах неразрушающего контроля. Как для визуализации двумерного (на плоскость детектора), так и трехмерного распределения радиоактивного препарата внутри исследуемого объекта.
Целью изобретения является снижение себестоимости устройства и повышение точности определения распределения радиоактивного препарата внутри исследуемого объекта.
Известен способ для определения распределения радиоактивного препарата внутри исследуемого в виде изображения этого распределения по патенту США 3,684,886 (опубл. 1972.08.15) [2], патенту США 4,090,080 (опубл. 1978.05.16) [3], патенту США 4,563,583 (опубл. 1986.01.07) [4], патенту США 6,627,893 В1 (опубл. 2003.09.30) [5], патенту США 6,631,285 В2 (опубл. 2003.10.07) [6]. Способ состоит в измерении интенсивности излучения препарата через щелевые коллиматоры координатно чувствительным детектором, находящимся у выходов щелевых коллиматоров, входы которых направлены в сторону исследуемого объекта. Измерения производят для различных угловых положений системы коллиматоры-детектор, получая набор данных, аналогичный компьютерной томографии, к которому применяют какой-либо алгоритм обработки (например, обратное преобразование Радона [3]), и получают изображение распределения радиоактивного препарата внутри объекта.
Преимуществом данного способа измерения относительно классического способа измерения через узконаправленный коллиматор [1] является высокая эффективность регистрации гамма-квантов через щелевые коллиматоры. Недостатком, как и в [1], является необходимость использования в устройствах для реализации способа координатно чувствительных детекторов (например, в виде камеры Анже [2] или стрип-детектора [3]), изготовление которых представляет определенную сложность и приводит к удорожанию устройства.
Реализации способа стрип-детектора на основе сцинтиллятора и подключенного к нему через оптический согласователь фотоумножителя не являются эффективными, как указывалось в [3] и [4], а использование теллурида кадмия [4] при реализации способа приводит к удорожанию детектора в указанных устройствах.
Для снижения себестоимости устройства при реализации способа предлагалось вместо длинных стрипов использовать короткие стрипы [5] и [6] на теллуриде кадмия, но это приводит к снижению эффективности регистрации излучения радионуклида, так как площадь стрипов значительно снижается.
Кардинальным решением для удешевления устройства, реализующего способ, было бы использование недорогого стрип-детектор или отказ от координатно чувствительного детектора вообще, поскольку координатно нечувствительный детектор намного дешевле координатно чувствительного. Однако такого технического решения предложено не было.
Кроме того, при реализации способа для получения изображения с высоким пространственным разрешением требуется стрип-детектор высокого пространственного разрешения и щелевой коллиматор с малым шагом между щелями. Изготовление стрипов равной чувствительности и коллиматоров с прозрачностью, одинаковой для всех щелей, представляется проблематичной, и, видимо, никакая технология не позволит изготавливать абсолютно идентичные щели и стрипы, что приведет к тому, что в результирующем изображении радионуклида появятся кольцевые артефакты. О возникновении кольцевых артефактов, связанных с неточностью стрипов и щелей коллиматора, в указанных технических решениях [3-6] также не упоминается. В связи с этим в известных технических решениях [3-6] нет методов устранения артефактов, связанных с различной прозрачностью щелей и чувствительностью стрипов. Не было предложено и методов измерения прозрачности щелей коллиматора и чувствительности стрипов.
Однако в известных технических решениях [3-6] предложно компенсировать другие искажения результата трехмерной реконструкции, например связанные с весовой функцией 1/r, путем наклона пластин многощелевого коллиматора, либо алгоритмическими методами. Анализ указанных решений [3-6] говорит о том, что они не являются единственно возможными способами, позволяющими компенсировать указанные искажения, связанные с 1/r. При использовании других коллиматоров или других методов измерения, видимо, можно компенсировать указанные искажения другими подходами.
Данное предположение основано на том, что использование коллиматора в виде набора пластин не является единственно возможным для указанного способа измерения и устройств его реализующих.
Для устранения указанных недостатков необходимо модифицировать способ измерения, коллиматоры, конструкцию устройства и алгоритмы обработки измеренных данных.
Размер стрип-детектора в известных технических решениях [3-6] меньше размера исследуемого объекта. При реконструкции двумерного изображения возникает проблема, известная в компьютерной томографии как неполный набор данных. Наличие неполного набора данных искажает результат реконструкции, особенно на краях исследуемой области.
В известных технических решениях [3-6] не предложено методов, позволяющих компенсировать или снизить искажения, связанные с неполным набором данных на краях исследуемой области при получении двумерных изображений.
В известных технических решениях [3-6] при обработке данных используется приращение функции для оценки ее производной. Использование приращения вместо производной снижает точность реконструкции. Использование более точного метода оценки производной, особенно в шумах, позволило бы повысить точность конечного результата.
В предлагаемом техническом решении предлагается ряд подходов для устранения указанных недостатков.
На Фиг.1 показано устройство, реализующее различные подходы по устранению указанных недостатков.
Совершенствования, касающиеся системы детектор-коллиматор и собственно коллиматора, показаны на Фиг.2 - Фиг.10. Для удешевления устройства при реализации способа предлагается в качестве стрип-детектора использовать набор сцинтилляционных волокон (Фиг.2 позиция А) требуемого сечения и длины, к торцам которых прикреплены высокочувствительные PIN фотодиоды или просто фотодиоды требуемой площади, или линейка фотодиодов.
Использование линейки фотодиодов для построения стрип-детектора известно [3], однако в известном техническом решении они прикреплены не к торцам, а сбоку сцинтиллятора через оптический согласователь, что снижает эффективность детектора и увеличивает его высоту. При создании детектора большой площади высота может оказаться недопустимо большой.
В известном техническом решении [4] использовано множество тонких оптических волокон для передачи вспышек света от стрипов сцинтиллятора к фотоумножителям. Однако сами оптоволокна не являются сцинтилляционными. Использование сцинтилляционных волокон не рассматривается.
В предлагаемом решении отдельные тонкие сцинтилляционные волокна укладывают так, чтобы образовалась толщина сцинтиллятора, необходимая для эффективного поглощения излучения заданной энергии. Ширину набора организуют такой, чтобы получить пространственное разрешение и ширину детектора требуемого значения (Фиг.2 позиция А).
Схожие конструкции структурированных сцинтилляторов используются в современных цифровых детекторах рентгеновского излучения. Однако длина сцинтиллятора в этих устройствах не превышает обычно долей сантиметра и определяется эффективностью поглощения излучения. В предлагаемом техническом решении длина сцинтилляционных волокон (столбиков) может составлять десятки сантиметров и метры и определяться потребной длиной стрипа. Эффективность поглощения излучения определяется толщиной набора сцинтилляционных волокон. Кроме того, излучение на структурированный сцинтиллятор в известных технических решениях воздействует с торца волокна, в то время как в предлагаемом техническом решении излучение падает поперек волокна, чтобы реализовать режим стрип-детектора (Фиг.2 позиции А и В).
В предлагаемом решении возможно также использование одного длинного сцинтиллятора (например, из йодида цезия CsI) требуемого поперечного сечения и длины для каждого стрипа, вместо набора столиков микронного сечения, что не нарушит работоспособность предлагаемого технического решения. Стенки сцинтиллятора в этом случае должны иметь либо зеркальный, либо диффузный отражатель. К торцам сцинтиллятора следует прикрепить, как и ранее, фотодиоды (Фиг.2 позиция В).
Возможны и другие варианты структурированных сцинтилляционных стрипов, например за счет использования капилляра с заполнением его жидким сцинтиллятором или набора капилляров (поликапиляр). В любом случае, чтобы реализовать режим стрип-детектора, соотношение длины к толщине такого структурированного сцинтиллятора должно быть намного больше, чем в известных структурированных сцинтилляторах.
Таким образом, отличительной особенностью предлагаемого изобретения по данному пункту является использование структурированного сцинтиллятора, отношение длины которого к его толщине много больше единицы.
Чтобы компенсировать затухание световых вспышек внутри длинного сцинтиллятора может быть применена известная схема [13] компенсации затухания в материале сцинтиллятора (например, в виде перемножения сигнала от двух фотодиодов, установленных на противоположных концах сцинтиллятора), что позволяет обеспечить высокое энергетическое разрешение, а при необходимости (если в дополнение к умножителю использовать делитель, сигнал с выхода которого характеризует координату вспышки) обеспечивает некоторое пространственное разрешение вдоль сцинтиллятора [13]. Если свойства сцинтиллятора таковы, что затухание световых вспышек в материале сцинтиллятора незначительно, то можно обойтись без схемы компенсации затухания.
Применяя предлагаемое техническое решение, можно создать стрип-детектор большой площади, малой толщины и низкой себестоимости, по сравнению, например, с детектором на основе теллурида кадмия. Поскольку линейки фотодиодов и сцинтилляторы на основе йодида цезия или пластиковые сцинтилляторы являются достаточно дешевыми материалами. Длина стрипов может быть очень большой (десятки сантиметров и метры). В отличие от технических решений [3] с использованием линейки детекторов на теллуриде кадмия малой площади, предлагаемый детектор будет обладать большой площадью и, следовательно, высокой эффективностью регистрации излучения.
Возможность создания детектора с высокой эффективностью регистрации является очень важной в медицинских применениях, поскольку позволяет либо сократить время проведения исследования, либо сократить количество вводимого радионуклида.
Кроме того, такой детектор можно сделать малым по толщине и неохлаждаемым, что является немаловажным при построении устройства.
Более радикальным вариантом удешевления устройства является использование координатно нечувствительного детектора в качестве стрип-детектора (Фиг.3). В этом случае используется сцинтиллятор большой площади, равный по площади стрип-детектору, и фотодетектор (фотоумножитель) большой площади, соединенные вместе и образующие детектор излучения радионуклида большой площади. Между этим координатно нечувствительным детектором большой площади и многощелевым коллиматором помещают экран из материала, прозрачность которого для излучения радионуклида неоднородна вдоль направления, перпендикулярного щелям коллиматора. Этот экран соединен со средством, обеспечивающим его линейное перемещение вдоль направления, перпендикулярного щелям коллиматора.
В результате движения экрана на выходе детектора большой площади возникает сигнал, определяемый операцией математической свертки искомого сигнала (плоскостного интеграла) и распределения неоднородности в экране. Чтобы получить требуемый исходный неискаженный сигнал (плоскостной интеграл) необходимо произвести операцию обратной математической свертки. Данная математическая задача решена академиком Тихоновым и относится к классу обратных некорректных задач [9].
На практике измерения производят в дискретные моменты времени, и решение обратной задачи необходимо производить в дискретном виде. Интервал времени, через который производят измерения, определяет то пространственное разрешение, которое будет иметь данный стрип-детектор, поскольку все измерения производят во времени при движении экрана.
Данный подход позволяет использовать в качестве стрип-детектора координатно нечувствительный детектор.
Несмотря на то, что при указанном подходе возможно использование практически любой неоднородности в экране, немаловажной является задача максимизации отношения сигнал/шум в условиях шумов и дискретных измерений. Решение такой задачи в условиях дискретного измерения известно на основе массивов с плоскими боковыми лепестками и одним максимумом в автокорреляционной функции - URA массивы [10].
Эти массивы состоят из единиц и нулей, типа 10100111001 ... Реализация их на практике требует всего лишь проделывания отверстий в непрозрачном для излучения радионуклида экране, который можно сделать из материала с высоким атомным номером (свинец, вольфрам и т.д.). Такой материал является тяжелым по весу, и средство для его линейного перемещения должно быть достаточно мощным.
На Фиг.4 показан стрип-детектор на основе сцинтиллятора и фотодетектора большой площади, между которыми расположен оптический экран, содержащий неоднородность для оптического излучения (излучения сцинтиллятора) со свойствами неоднородности, аналогичными экрану для излучения радионуклида. В этом случае вес оптического экрана может быть минимальным, так как его можно изготовить, например, из черной плотной бумаги, фольги и пластика. Возможно использование и других материалов, что не является принципиальным. Оптический экран, как и ранее, должен быть соединен со средством его перемещения.
На Фиг.5 показан стрип-детектор на основе сцинтиллятора и фотодетектора большой площади, между которыми расположен оптический движущийся экран в виде гибкого кольца, охватывающего сцинтиллятор. Экран движется постоянно в одну сторону (как лента транспортера), исключаются возвратно-поступательные движения. Устройство получается максимально простым и легким. Оптический экран, как и ранее, соединен со средством его перемещения.
Однако в настоящее время известны оптические пространственно-временные модуляторы, например на основе жидких кристаллов. Используя их, можно устранить механическое движение экрана. Оптическая прозрачность модулятора должна изменяться во времени таким образом, чтобы приводить к результату, аналогичному движению оптического экрана, то есть сигнал на выходе фотодетектора должен определяться как результат математической свертки искомого сигнала (плоскостного интеграла) и неоднородности экрана.
На Фиг.6 показан стрип-детектор на основе сцинтиллятора и фотодетектора большой площади, между которыми расположен оптический пространственно-временной модулятор. В качестве пространственно-временного оптического модулятора можно использовать жидкокристаллические оптические модуляторы, используемые в проекционных телевизорах, либо жидкокристаллические оптические пространственные модуляторы большой площади, используемые в плоских пассивных компьютерных мониторах. Пространственно-временно модулятор соединен со средством его управления.
В случае, если требуется согласовать размер сцинтиллятора и координатно нечувствительного фотодетектора, между ними можно установить оптический согласователь (фокон). В этом случае пространственный оптический модулятор следует устанавливать до или после оптического согласователя, в соответствии с размерами модулятора (на Фиг.6 оптический согласователь не показан).
Указанное техническое решение можно использовать как при параллельном расположении пластин в коллиматоре, так и при конвергентном и дивергентном. Если ограничиться только дивергентным коллиматором, то техническое решение можно еще более упростить и соответственно еще более удешевить устройство. В дивергентном случае можно использовать детектор излучения радионуклида в виде одного стрипа и движущегося экрана, без использования многощелевого коллиматора.
На Фиг.7 показан стрип-детектор для дивергентного случая на основе одного стрипа и движущегося экрана. Экран соединен со средством его перемещения.
Эффективность регистрации будет аналогичной случаю использования детектора большой площади и движущемуся экрану, указанному ранее. Объясняется это тем, что сцинтиллятор выступает в роли интегратора вспышек, поступающих от всех направлений (как и в случае детектора большой площади). При этом сам интегратор в дивергентном случае можно сделать в виде одного стрипа. В этом случае устройство получается более простым и соответственно более дешевым по сравнению с детектором большой площади. Характер сигнала на выходе такого детектора будет аналогичен сигналу, описанному ранее, то есть представлять собой операцию математической свертки искомого сигнала (плоскостного интеграла) и распределения неоднородности в экране. Для получения искомого сигнала (плоскостного интеграла) необходимо произвести операцию обратной математической свертки [9].
Когда длина стрипа минимальна (например, равна его ширине и высоте), устройство получается весьма дешевым. В этом случае фактически используется маленький кусочек сцинтиллятора, прикрепленный к фотодиоду. Однако, если использовать стрип малой длины, то эффективность регистрации излучения будет низкой. Поэтому несмотря на принципиальную возможность использования короткого стрипа, желательно использовать длинный стрип. Короткий стрип можно использовать тогда, когда интенсивность излучения радионуклида достаточно высока.
В том случае, если в качестве экрана использовать вращающийся барабан, внутри которого коаксиально расположен один стрип. Барабан соединен со средством его вращения. Устройство становится максимально простым (Фиг.8).
Как и ранее можно использовать короткий стрип. Несмотря на принципиальную возможность использования короткого стрипа, желательно использовать длинный стрип. Короткий стрип можно использовать тогда, когда интенсивность излучения радионуклида достаточно высока.
Для эффективной регистрации гамма-квантов большой энергии (более 100 кэВ) сечение сцинтиллятора в стрип-детекторах (Фиг.7 и Фиг.8) должно быть достаточно большим. Однако при большой сечении сцинтиллятора уменьшается пространственное разрешение в реконструируемом изображении. Чтобы обеспечить одновременно высокую эффективность регистрации и высокое пространственное разрешение в указанных стрип-детекторах используется сцинтиллятор необходимого сечения (для эффективной регистрации квантов требуемой энергии) и свинцовая "рубашка" вокруг сцинтиллятора с продольной щелью требуемой ширины.
На Фиг.9 (позиция А и В) показано поперечное сечение сцинтиллятора, совмещенного с "рубашкой" защиты для стрип-детектора на основе одного стрипа. Ширина щели в "рубашке" определяет требуемое пространственное разрешение, а угол раскрыва щели определяет область объекта, охватываемую детектором. В позиции А угол раскрыва щели меньше, чем в позиции В, при этом ширина щели одинакова и в той и в другой позиции.
Применение такого технического решения, помимо основного назначения, позволяет резко снизить вес защитной "рубашки", что может быть существенным при создании мобильных устройств. Это справедливо как для технического решения, показанного на Фиг.7, так и на Фиг.8.
Однако использование защитной "рубашки" необходимо во всех указанных ранее технических решениях, но место ее положения и назначения являются общеизвестными, поэтому на фигурах, поясняющих другие технические решения, она не показана. Защита показана там, где ее положение и назначение не является общеизвестным.
Для устранения влияния фактора 1/r на результат реконструкции стрип смещают относительно оси вращения системы детектор-коллиматор на угол δ, пропорциональный требуемому пространственному разрешению в реконструируемом изображении и находящийся в пределах от 0 до 5 градусов.
Оба указанных технических решения на основе Фиг.7 и Фиг.8 помимо удешевления устройства и устранения влияния фактора 1/r решают и задачу влияния прозрачности щелей многощелевого коллиматора на конечный результат реконструкции, поскольку многощелевой коллиматор в них попросту отсутствует.
Однако влияние многощелевого коллиматора можно избежать для дивергентного случая и при использовании детектора, состоящего из множества стрипов, не используя движущийся экран, путем устранения самого многощелевого коллиматора.
Чтобы устранить влияние различной прозрачности щелей многощелевого коллиматора для дивергентного случая, предлагается использовать коллиматор в виде отдельной протяженной щели, параллельной стрипам детектора и проделанной в непрозрачном экране, установленном на некотором расстоянии перед детектором (Фиг.10). При этом сама щель смещается относительно оси вращения системы детектор-коллиматор на угол, пропорциональный требуемому угловому разрешению, в пределах от 0 до 5 градусов. Что позволяет решить задачу устранения влияния искажения 1/r одновременно с устранением влияния прозрачности щелей коллиматора.
При этом следует отметить, что использование множества неподвижных щелей, смещенных относительно оси исследуемого объекта совместно со стрип-детекторами, известно [12], однако они находятся на расстоянии относительно оси вращения системы коллиматор-детектор, намного превышающем значение 5 градусов, и это значение не пропорционально требуемому пространственному разрешению. Это смещение определяется желанием одновременно измерять множество проекций, а не компенсировать искажения многощелевого коллиматора и искажения типа 1/r в результирующем изображении. Кроме того, щели и детекторы являются неподвижными относительно исследуемого объекта.
В предлагаемом техническом решении система детектор-коллиматор соединена со средством перемещения (вращения) ее вокруг ее оси.
Использование одной щели и отсутствие многощелевого коллиматора помимо указанных преимуществ позволяет также снизить стоимость устройства, поскольку стоимость его изготовления намного меньше, чем многощелевого.
Указанный однощелевой коллиматор можно также использовать при реализации стрип-детектора на основе координатно нечувствительного детектора большой площади и движущегося экрана (Фиг.3, Фиг.4, Фиг.5, Фиг.6). Расположение его в этом случае относительно оси вращения и ориентация аналогичны ранее указанным.
Ниже поясняется смысл использованных известных математических понятий:
"Свертка" (прямая апериодическая свертка).
При прямой апериодической свертке вместо значения апериодической функции I(x) в точке x используют ее средневзвешенное значение С(x) в диапазоне от минус до плюс бесконечности, при этом в качестве "весов" используется другая функция Н(x). В аналоговом виде такая свертка описывается интегралом свертки, в дискретном виде такая свертка описывается суммой.
"Обратная свертка" (обратная апериодическая свертка).
При обратной апериодической свертке вместо значения апериодической функции С(х) в точке х используют ее средневзвешенное значение I(х) в диапазоне от минус до плюс бесконечности, при этом в качестве "весов" используется другая функция H-1(x).
Функцию H-1(x) выбирают таким образом, чтобы компенсировать влияние прямой апериодической свертки, то есть получить неискаженное значение функции. В аналоговом виде такая свертка описывается интегралом свертки, в дискретном виде такая свертка описывается суммой. Такая процедура называется также деконволюцией.
"Циклическая свертка"
При циклической свертке вместо значения циклической (периодической) функции I(х) в точке х используют ее средневзвешенное значение С(х) в диапазоне периода повторения, при этом в качестве "весов" используется другая циклическая функция с тем же периодом повторения.
"Обратная циклическая свертка".
При обратной циклической свертке вместо значения циклической функции С(х) в точке х используют ее средневзвешенное значение I(х) в диапазоне периода повторения, при этом в качестве "весов" используется другая функция H-1(x).
Функцию Н-1(х) выбирают таким образом, чтобы компенсировать влияние прямой циклической свертки, то есть получить неискаженное значение функции. В аналоговом виде такая свертка описывается интегралом свертки, в дискретном виде такая свертка описывается суммой.
"Прямое преобразование Радона".
Прямое преобразование Радона сводится к переводу функции I(x,y) из декартовой системы координат в систему координат угловых проекций этой функции P(Q,s), где Q - угол, под которым получена проекция функции, s - координата вдоль проекции.
В аналоговом виде такое преобразование описывается интегральным уравнением, в дискретном виде - суммой.
Наглядным примером прямого преобразования Радона является получение рентгеновских снимков объекта с разных направлений вокруг объекта.
"Обратное преобразование Радона".
Обратное преобразование Радона сводится к переводу функции P(Q,s) из системы координат угловых проекций в декартову систему координат I(x,y). В аналоговом виде такое преобразование описывается сложным интегральным уравнением, в дискретном виде - специфической суммой.
Наглядным примером обратного преобразования Радона является получение томографического изображения пациента в медицинской компьютерной томографии на основе набора его рентгеновских проекций, полученных под различными углами.
Математические основы предлагаемого изобретения
1. Устранение влияния фактора 1/r в трехмерной реконструкции.
Приводимые математические соотношения по трехмерной реконструкции справедливы как для случая использования отдельной щели в качестве коллиматора, так и для случая одного стрипа и движущегося экрана. В обоих случаях возникает геометрия, эквивалентная дивергентному коллиматору. Однако в первом случае сигнал на выходе каждого стрипа представляет непосредственно плоскостной интеграл, а во втором случае плоскостной интеграл получается только после операции обратной свертки.
Будем считать, что значение плоскостного интеграла так или иначе уже измерено. Покажем, как компенсируются искажения типа 1/r в реконструируемом изображении, при отклонении фокальной точки "коллиматора" от оси вращения 25 на угол δ.
На Фиг.11А показаны проекции плоскостей интегрирования на плоскость, параллельную оси вращения 25, для угла поворота θ и угла поворота θ+180° системы детектор-коллиматор 11. Буквой а обозначены плоскости интегрирования для "крайнего стрипа", буквой b обозначены плоскости интегрирования для "n-ного стрипа". Плоскость интегрирования без смещения фокальной точки обозначена 50, плоскость интегрирования при смещении фокальной точки на угол δ обозначена 51, плоскость интегрирования при смещении фокальной точки на угол -δ обозначена 52.
На Фиг.11В показана изометрия плоскостей интегрирования для "n-ного стрипа".
Для дивергентного коллиматора значение плоскостного интеграла g(δ), в локальной системе координат привязанной к "n-ному" стрипу (Фиг.11В), при отклонении фокальной точки от оси 25 вращения системы детектор-коллиматор на угол δ равно

где f() - функция трехмерного распределения радионуклида 42 внутри исследуемого объекта 12.
Значение плоскостного интеграла g(-δ), при отклонении фокальной точки от оси вращения в другую сторону на угол -δ в локальной системе координат, равно

Если разницу двух этих значений g(δ) и g(-δ) умножить на константу

определяемую углом δ отклонения фокальной точки от оси, то получим следующее соотношение

которое можно переписать как

При этом разницу

можно трактовать как аппроксимацию частной производной функции f(), по переменной δ умноженной на константу, равную
одновременно учитывая то, что

Тогда, принимая во внимание то, что в декартовой системе координат частную производную можно вынести из под знака интеграла

разницу для двух плоскостных интегралов при противоположных углах δ можно переписать как

откуда видно, что эта разница не содержит члена, пропорционального 1/r, и аппроксимирует первую производную от функции ∫∫f(r,α,ω))rdrdα прямого преобразования Радона. В то же время известно [10], что для получения обратного преобразования Радона необходимо осуществить операцию "обратного" проецирования второй производной плоскостного интеграла
на область трехмерной реконструкции.
Таким образом, вычисляя разницу плоскостных интегралов для двух противоположных углов отклонения фокальной точки от оси вращения, мы получаем первую производную, свободную от влияния фактора 1/r.
После вычисления разницы плоскостных интегралов перекомпановываем данные в параллельную геометрию [4], затем по первой производной вычисляем вторую производную и осуществляем операцию "обратного проецирования", в результате чего получаем трехмерную реконструкцию искомой величины, свободную от влияния фактора 1/r.
В заключение добавим, что:
а. фокус для однощелевого (пинхольного) коллиматора с математической точки зрения находится там, где расположена щель,
в. фокус для одного стрипа и движущегося неоднородного экрана с математической точки зрения находится там, где расположен стрип.
Следовательно, чтобы устранить влияние фактора 1/r в трехмерной реконструкции в первом случае необходимо сдвинуть щель, а во втором случае сам стрип относительно оси вращения системы детектор-коллиматор на угол δ.
1. Аккуратное вычисление производных
Анализ выражения (10) по устранению искажающего фактора 1/r показывает, что в качестве оценки производной используется приращение функции. Но это тоже приводит к определенным искажениям. Наиболее наглядно характер искажений можно видеть в частотной области (Фиг.12).
Использование приращения функции в качестве ее производной приводит к "завалу" низких частот в оценке производной и, как следствие, к искажению результата реконструкции. Это отчетливо видно на Фиг.12, где показаны амплитудно-частотные характеристики оператора приращения - Фиг.12(А) и оператора дифференцирования - Фиг.12(В).
Чтобы устранить отличие оператора приращения от оператора дифференцирования, необходимо в частотной области умножить Фурье образ функции приращений на Фурье образ корректирующей функции

где f'() - искомая первая производная функции,
F-1[] - оператор обратного преобразования Фурье,
F[] - оператор прямого преобразования Фурье,
Δf() - функция приращений, полученная на основе вычитания измерений для двух, противоположных смещений фокальной точки,
K( Ω) - Фурье образ корректирующей функции.

где D( Ω) - Фурье образ оператора дифференцирования,
K( Ω) - Фурье образ оператора приращения.
При этом в качестве Фурье образа оператора дифференцирования D(ω) необязательно использовать "чистое" дифференцирование, показанное на Фиг.12(В). Возможно использование различных "регуляризирующих" вариантов [6] для повышения точности реконструкции - Фиг.12(С), суть которых сводится к некоторому сглаживанию результата реконструкции.
Полученная таким образом первая производная позволит производить реконструкцию с устранением фактора 1/r и без "завала" нижних частот в реконструированном изображении.
Аналогичным образом после перекомпоновки данных из веерной геометрии в параллельную [4], следует вычислять вторую производную, используя не приращение, а оператор дифференцирования.

При этом в качестве оператора дифференцирования также можно использовать не чистое дифференцирование - Фиг.12В, а различные варианты регуляризации - Фиг.12С, как и при вычислении первой производной. Оценка второй производной, особенно в шумах, станет точнее, улучшится точность реконструкции.
3. Двумерная реконструкция
В предлагаемом техническом решении помимо трехмерной реконструкции можно осуществлять и двухмерную реконструкцию трехмерного распределения радионуклида на плоскость детектора для всех вариантов технического решения. В этом случае плоскостные интегралы проецируются на плоскость детектора в виде линий, и реконструкция от плоскостных интегралов переходит к реконструкции линейных интегралов. В этом случае реконструкцию производят для обратного преобразования Радона для линейных интегралов и "параллельной геометрии". Термин "параллельная геометрия" является устоявшимся и широко используется в трансаксиальной томографии.
В нашем случае (Фиг.1) данное преобразование сводится к получению набора проекций Rθ(x') плоскостных интегралов на плоскость детектора для различных углов θ поворота системы детектор-коллиматор

где I(x,y) - проекция трехмерного распределения радионуклида на плоскость детектора.
Оси x' и y' задаются поворотом на угол θ против часовой стрелки в плоскости детектора, перпендикулярной оси 25:

с последующим восстановлением изображения проекции трехмерного распределения радионуклида на плоскость детектора из набора проекций, то есть получению обратного R-1 преобразования Радона [6], которое в операторном виде может быть записано как
где Dy - оператор частной производной по первой переменной;
Нy - оператор преобразования Гильберта;
В - оператор обратного проецирования.
За более детальным описанием прямого и обратного преобразования Радона для линейных интегралов при параллельной геометрии следует обратиться к указанному ранее источнику [6]. Там же можно найти несколько дискретных вариантов реализации обратного преобразования Радона для параллельной геометрии, называемых обычно алгоритмами реконструкции [6] и используемых в цифровых вычислительных машинах.
Здесь же важно отметить, что плоскостные интегралы (и их линейные проекции) содержат искажающий фактор, пропорциональный 1/r, поэтому получаемое двумерное реконструируемое изображение будет содержать также этот фактор. С этим можно мириться, считая что для двумерного случая это непринципиально, так как все слои трехмерного распределения сложены "в одну стопку" как в рентгеновском снимке. Отличие от рентгеновского снимка состоит лишь в том, что "вклад" каждого слоя зависит от расстояния, на котором находится слой от плоскости детектора. Но можно и не мириться, считая, что двумерная реконструкция может использоваться далее при получении трехмерного результата восстановления. В этом случае влияние фактора 1/r необходимо устранить. После устранения фактора 1/r двумерная реконструкция будет аналогична обычному рентгеновскому снимку, где влияние 1/r отсутствует.
Решить эту проблему можно также как для трехмерного случая, используя разницу двух измерений (приращение функции), проведенных при различных углах смещения фокуса коллиматора. Однако для двумерного случая требуется первая производная, а не вторая, что следует из анализа обратного преобразования Радона для линейных интегралов.
Использование в качестве первой производной приращения функции приведет к "завалу" нижних частот в реконструируемом изображении, что отмечалось в разделе, затрагивающем вычисление производных. Поэтому, чтобы устранить искажения типа "завала" высоких частот, следует воспользоваться приемами, описанными в разделе по вычислению производных.
4. Снижение искажений, связанных с неполным набором данных.
Помимо указанного ранее фактора 1/r в реконструкции может возникнуть другой искажающий фактор, связанный с тем, что стрип-детектор не может "захватить" весь объект целиком, края объекта не попадают в поле зрения детектора. Такая ситуация возникает, когда размер стрип-детектора меньше размера объекта, или когда используется конвергентный коллиматор [3-6]. С математической точки зрения такая ситуация известна как ненулевые краевые условия в проекции или неполный набор данных [6]. Возникающие при этом искажения в реконструированном изображении в основном связаны со "скачком" производной в тех местах, где данные обрываются.
Полностью устранить влияние отсутствия данных на результат реконструкции принципиально невозможно. Однако можно уменьшить влияние искажений. Уменьшать искажения можно дополнением данных. В данном техническом решении предлагается дополнять отсутствующие данные плавно изменяющейся функцией типа sin() или cos(). Данные дополняют алгоритмическим путем, следующим образом

где М - число стрипов в детекторе,
K - число отсчетов в полном наборе данных,
i - номер дополнения, лежащий в диапазоне от 1 до K - М,
I(1) - измеренные значения интенсивности излучения для 1-го стрипа,
I(М) - измеренные значения интенсивности излучения для М-го стрипа,
ID(М+i) - дополненные значения интенсивности излучения.
При этом считается, что данные отсутствуют только "справа" от измеренных значений. Если данные отсутствуют как "справа", так и "слева" от измеренных значений, то полученный набор "полных" данных сдвигают циклически (как в регистре компьютера) на необходимую величину.
Данный подход основан на том, что вычисление производных с устранением искажающих факторов удобно производить в частотной области, как отмечалось ранее. При этом используется быстрое дискретное преобразование Фурье - БПФ. Использование этого преобразования предполагает, что функция, к которой оно применяется, периодическая. Поэтому предложенный подход сводится к дополнению данных таким образом, чтобы отсутствовал разрыв на концах периодической функции.
Использование приведенного подхода по дополнению данных не является оптимальным, однако во многих практических случаях позволяет повысить точность реконструкции, связанной со скачком производной в тех местах, где данные обрываются, особенно, при двумерной реконструкции.
5. Калибровка измеренных данных - устранение неизвестного множителя.
Процедура калибровки требуется для всех вариантов предлагаемого технического решения, поскольку измеренные значения интенсивности излучения содержат искажения, вызванные различными причинами.
При использовании многощелевого коллиматора прозрачность отдельных щелей невозможно сделать абсолютно идентичной. Невозможно также сделать абсолютно идентичным и усиление в каждом стрипе стрип-детектора. При использовании однощелевого коллиматора (пинхольного) возникают искажения, связанные с различной удаленностью частей объекта до детектора. Аналогичные искажения возникают и при использовании в качестве стрип-детектора одного стрипа и движущегося неоднородного экрана.
Все перечисленные искажения относятся к мультипликативным, то есть искажениям, вызванным умножением измеряемой величины (интенсивности излучения) на некий неизвестный множитель. Если этот неизвестный множитель измерить и поделить измеренные значения на его величину, то искажения исчезнут. Если искажения не устранять, то в реконструируемом изображении появятся кольцевые артефакты. В известных технических решениях [3, 4] эта проблема не рассматривалась.
В данном техническом решении, как и в гамма-камерах Анже, предлагается решать эту проблему путем измерения интенсивности излучения от однородного фантома. Особенность измерения для данного технического решения состоит в отсутствии вращения системы детектор-коллиматор, необходимой при исследовании объекта, и специальной форме однородного фантома.
После того как измерения проведены, калибровка проводится в соответствии со следующим соотношением

где i - номер стрипа в детекторе,
I(i) - калиброванное значение измерения интенсивности излучения [имп/сек],
A(i) - измеренное значения интенсивности излучения [имп/сек],
C(i) - измеренная нормированная по максимуму интенсивность излучения от однородного фантома [безразмерная от 0 до 1].
Подробности организации измерения интенсивности излучения от однородного фантома и описание фантома приведено в соответствующем разделе.
6. Прямая и обратная свертка
Приводимые далее математические соотношения по свертке справедливы как для случая использования координатно нечувствительного детектора большой площади, так и для случая использования в качестве детектора одного стрипа. При этом при использовании детектора большой площади они справедливы как для случая с экраном, расположенным между детектором и коллиматором (экран для излучения радионуклида), так и для случая с экраном, расположенным между сцинтиллятором и фотодетектором (экран в виде движущегося или пространственного оптического модулятора).
Во всех указанных случаях регистрируемый детектором сигнал С(x') будет являться результатом интеграла свертки (конволюции) искомого плоскостного интеграла исследуемого предмета и функции распределения неоднородности экрана вдоль направления его движения
где I(x') - искомый плоскостной интеграл;
Н(х') - распределение неоднородности вдоль движения экрана;
С(х') - регистрируемый детектором сигнал.
При этом с учетом того, что экран движется (сканирует), регистрируемый детектором сигнал является функцией времени

где V - скорость сканирования;
t - время сканирования.
Чтобы получить искомое значение плоскостного интеграла необходимо выполнить операцию обратной свертки (деконволюции) над регистрируемым детектором сигналом
где H-1(x') - восстанавливающая функция для Н(x').
Анализ выражений (13) и (14) показывает, что если функция Н(x') - дельта-функция, что соответствует неоднородности экрана в виде узкой щели, то восстановление не требуется, так как регистрируемый детектором сигнал в точности соответствует плоскостному интегралу исследуемого предмета. Если функция Н(x') константа, что соответствует полному отсутствию неоднородности, то восстановление вообще невозможно. Таким образом, фундаментальным требованием к функции распределения неоднородности экрана является требование отличия функции неоднородности экрана от константы. Если это требование выполняется, то можно провести прямое и обратное преобразование с той или иной степенью достоверности.
С математической точки зрения данная задача принадлежит к так называемому классу некорректных обратных задач, решение которых разработано академиком Тихоновым [4] и основано на регуляризации. Суть данных решений, основанных на регуляризации, проще всего изложить с использованием частотного подхода.
Если F[C(x')] - Фурье образ плоскостного интеграла, a F[H(x')] - Фурье образ распределения неоднородности экрана, то Фурье образ искомого плоскостного интеграла F[I(x')] равен

где λ - коэффициент регуляризации.
А сам плоскостной интеграл равен

где F-1[...] - оператор обратного частотного преобразования.
То есть Фурье образ восстанавливающей функции F[H-1(x')] равен

а сама восстанавливающая функция равна

Следовательно, суть коэффициента регуляризации λ состоит в защите от деления на малые величины. Его конкретное значение выбирают в зависимости от характера функции F[H(x')].
Приведенное описание сути регуляризации является частным и за более детальным объяснением следует обратиться к [4].
При практической реализации с использованием цифровой вычислительной техники регистрируемый детектором сигнал дискретизируют во времени. Непрерывное интегрирование преобразуется в суммирование дискретизированных величин.
Регистрируемый детектором сигнал равен
искомые дискретные значения плоскостного интеграла равны

При этом нахождение дискретных восстанавливающих функций Н-1(...) возможно обеспечить на основе знания дискретных распределений неоднородности экрана H(...) и регуляризирующего подхода, описанного ранее [4], совместно с дискретным преобразованием Фурье.
Однако, кроме использования апериодической свертки, возможно использование циклической свертки. В этом случае данные можно представить расположенными циклически с периодом повторения N.
В случае использования циклической свертки соотношения приобретают несколько иной вид:


где mod[...,N] означает вычисление значения по модулю N от указанной величины.
При этом, чем с большей частотой произведена дискретизация измеряемого детектором сигнала, тем больше пространственное разрешение будет иметь изображение исследуемого предмета после реконструкции.
То есть при данном подходе пространственное разрешение (в первом приближении) определяется частотой дискретизации измеряемого детектором сигнала. Если функция распределения неоднородности экрана известна, то для получения изображения более высокого разрешения требуется всего лишь увеличить частоту дискретизации сигнала без изменения распределения интенсивности излучения в сечении пучка.
Число стрипов М, длина перемещения экрана S, скорость его перемещения V и интервал дискретизации Δt завязаны следующим соотношением
В условиях наличия шумов, что соответствует реальной практической ситуации, выбор произвольной функции свертки (произвольного распределения неоднородности экрана), видимо, не будет практичным вариантом решения задачи. В условиях наличия шумов более практичным вариантом будет выбор такой функции свертки, которая для заданной частоты дискретизации максимизирует по какому-либо критерию отношение сигнал/шум в изображении исследуемого предмета. Например, по критерию максимума отношения сигнал/шум для каждого отдельного элемента изображения. В этом случае решение задачи в дискретной форме известно на основе использования массивов, имеющих плоские боковые лепестки в циклических автокорреляционных функциях, так называемые URA массивы [5]. Эти массивы построены на основе использования функций Уолша, то есть на основе 0 и 1. Для этих массивов известны восстанавливающие функции Н-1(...) [5], которые будут состоять из -1 и +1. Кроме того, известно, что максимальное отношение сигнал/шум в каждом отдельном элементе восстановленного изображения достигается для массивов URA, обладающих эффективной прозрачностью по отношению к проникающему излучению 50% (то есть, число единиц равно 50% от общей длины массива). Использование массивов URA с другим коэффициентом прозрачности (большим или меньшим 50%) не нарушает работоспособности, но понижает отношение сигнал/шум в результирующем изображении.
Изготавливать неоднородные экраны на основе массивов URA так же очень просто, поскольку это сводится к проделыванию отверстий в экране.
Использование других критериев оптимизации может привести к использованию других функций свертки, но не изменит метод решения задачи.
Таким образом, глобальный вывод, который следует из предложенного рассмотрения, состоит в том, что при надлежащем выборе функции свертки (распределении неоднородности экрана) можно не только получить высокое пространственное разрешение, но и эффективно регистрировать излучение радионуклида.
В тоже время, если не рассматривать задачу максимально эффективного измерения плоскостных интегралов, то в качестве функции свертки (распределения неоднородности экрана), даже в условиях шумов, можно использовать практически любую функцию. При этом конечное разрешение в результирующем изображении будет определяться только частотой дискретизации измеряемых данных, а вид функции свертки будет влиять на отношение сигнал/шум в искомом изображении. В этом случае задачу восстановления изображения можно решать на основе дискретных вариантов указанных ранее методов регуляризации, предложенных академиком Тихоновым [4] (во временной или частотной области).
Предлагаемое изобретение поясняется чертежами, на которых представлены:
Фиг.1 - Общая схема устройства для реализации способа.
Фиг.2 - Стрип-детектор на основе структурированного сцинтиллятора.
Фиг.3 - Стрип-детектор на основе координатно нечувствительного детектора большой площади и расположенного перед ним подвижного экрана переменной вдоль движения экрана прозрачности.
Фиг.4 - Стрип-детектор на основе сцинтиллятора, координатно нечувствительного фотодетектора большой площади и подвижного светового экрана переменной вдоль движения экрана прозрачности, расположенного между ними.
Фиг.5 - Стрип-детектор на основе сцинтиллятора, координатно нечувствительного фотодетектора большой площади и подвижного гибкого светового экрана переменной прозрачности, охватывающего сцинтиллятор.
Фиг.6 - Стрип-детектор на основе сцинтиллятора, координатно нечувствительного фотодетектора большой площади и пространственно-временного оптического модулятора, расположенного между ними.
Фиг.7 - Стрип-детектор на основе одного стрипа и движущегося неоднородного вдоль движения для излучения радионуклида экрана.
Фиг.8 - Стрип-детектор на основе одного стрипа и коаксиального вращающегося неоднородного для излучения радионуклида экрана.
Фиг.9 - Расположение свинцовой защиты на стрип-детекторе, состоящем из одного стрипа.
Фиг.10 - Коллиматор в виде одной щели в экране.
Фиг.11 - Геометрические соотношения при компенсации искажений 1/r для дивергентного коллиматора.
Фиг.12 - Фурье образы оператора приращения и дифференцирования.
Фиг.13 - Относительное расположение однородного фантома и системы детектор-коллиматор при проведении калибровочных измерений.
Фиг.14 - Внешний вид макетного образца гамма-камеры со снятым декоративным кожухом.
Фиг.15 - Сравнительные сцинтиграммы щитовидной железы двух пациентов, полученные на штатной гамма-камере фирмы GE Millennium за время 10 мин с расстояния 10 см и полученные на макетном образце гамма-камеры с расстояния 10 см, при щелевом коллиматоре глубиной 50 мм, шагом 1,6 мм и времени исследования 15 мин.
На Фиг.1 показано устройство, реализующее различные подходы по устранению недостатков существующих технических решений.
Устройство состоит из коллиматора 7 (конвергентного, дивергентного или рутинного), расположенного перед стрип-детектором 9 и направленного входным отверстием в сторону объекта 12, расположенного на основании 13. Коллиматор 7 и детектор 9 образуют совместно систему коллиматор-детектор 11, которая соединена с системой ее позиционирования 17, содержащую средство 15 вращения системы 17 вокруг продольной оси 14 объекта 12 и соединенное с ним средство 16 для вращения системы 11 вокруг оси 25, перпендикулярной продольной оси объекта 12. Сигнальный выход стрип-детектора 9 соединен со входом системы сбора данных 18, которая соединена по выходу с процессором обработки данных 22, который в свою очередь соединен с компьютером 20. При этом сам компьютер 20 также соединен со средством управления сканированием 19 и средством визуализации результата обработки данных 21. Средство управления сканированием 19 соединено с управляющими входами стрип-детектора 9 и системы позиционирования 17. Номерами 47 и 3 обозначены: радионуклид внутри объекта и его излучение соответственно.
Устройство, показанное на Фиг.1, работает следующим образом. Компьютер 20 через средство управления сканированием 19 подает начальные установочные сигналы на стрип-детектор 9 и систему позиционирования 17. В результате чего система позиционирования 17 и входящие в нее средства 15 и 16 приходят в исходное положение по углу позиционирования относительно осей 14 и 25. В это же время (или позже или ранее, что не является принципиальным) детектор 9 также приходит в рабочее состояние. Например, на нем устанавливаются рабочие коэффициенты усиления предусилителей, рабочие напряжения и так далее. После этого от средства управления сканированием 19 подается сигнал системе 17. В результате чего система 11 начинает вращаться от средства 16, входящего в состав системы 17, вокруг оси 25 на заданный угол поворота θ (например, 360 градусов). После поворота системы 11 на заданный угол вокруг оси 25, средство 15, входящее в состав системы 17, поворачивает систему 11 на малый заданный угол Δϕ вокруг оси 14 (например, 360/N, где N - общее число поворотов вокруг оси 14). После чего повторяется поворот системы 11 вокруг оси 25 от средства 16, но в противоположную сторону. Все сигналы в системе 17 в процессе вращения системы 11 поступают от средства управления 19. Далее указанные действия по вращению вокруг осей 25 и 14 системы 11 повторяются до тех пор, пока не будет произведено сканирование вокруг оси 14 на заданный угол.
В процессе указанных действий сигнал о величине плоскостных интегралов с выхода стрип-детектора 9 поступает на вход системы сбора данных 18. После завершения сканирования в системе сбора данных 18 содержится набор данных, необходимый для проведения трехмерной реконструкции, который передается в процессор обработки данных 22, с выхода которого поступает в компьютер 20 и средство визуализации 21.
При необходимости измеренные данные, или результат обработки, могут быть переданы сторонним потребителям по линиям передачи данных (не показаны).
В том случае, если не требуется трехмерная реконструкция, а только двумерная, то полного вращения вокруг оси 14 системы 11 не требуется, и сканирование заканчивается после вращения системы 11 на заданный угол θ вокруг оси 25. В этом случае данные из системы сбора данных 18 поступают также на вход процессора обработки данных 22, где производится двумерная реконструкция проекции трехмерного распределения радионуклида в объекте 12 на плоскость детектора 9. Результат реконструкции, как и ранее, визуализируется либо передается сторонним потребителям.
На других чертежах показаны усовершенствования, касающиеся различных частей описанного устройства.
На Фиг.2 позиции А и В показан стрип-детектор на основе структурированного сцинтиллятора 40 и фотодиодных линеек 2. Торец структурированного сцинтиллятора показан в позиции С и D.
Детектор Фиг.2 позиция А состоит из структурированного сцинтиллятора 40 и фотодиодных линеек 2а и 2в. Сигнальные выходы фотодиодных линеек 2а и 2в соединены со входами предварительного усилителя - перемножителя - амплитудного дискриминатора 28, а управляющие входы линеек 2а и 2в соединены с выходом управляющего блока 29. Выходы предварительного усилителя - перемножителя - амплитудного дискриминатора 28 и управляющего блока 29 соединены со входами средства сбора данных 18 и средства управления 19.
Длина сцинтилляционных волокон 41 сцинтиллятора 40 много больше их толщины. Толщина волокон 41 много меньше ширины сцинтиллятора 40, определяемой вдоль направления 35. Направление 35 и ось 25 перпендикулярны.
То есть для набора нужной толщины и ширины сцинтиллятора 40 используется множество волокон 41. Ширина фотодиодов, в высокочувствительных фотодиодных линейках 2а и 2в, прикрепленных (приклеенных) к торцам структурированного сцинтиллятора 40, примерно равна толщине сцинтиллятора 40.
Если толщина сцинтиллятора 40 и толщина линеек 2а и 2в сильно отличаются, то они соединяются (приклеиваются) через оптический согласователь (фокон), который на Фиг.2 позиция А не показан.
Детектор Фиг.2 позиция В отличается от позиции А тем, что толщина сцинтилляционных волокон (столбиков) 1, равна толщине структурированного сцинтиллятора 40, то есть толщина сцинтиллятора 40 определяется толщиной одного ряда сцинтилляционных волокон (столбиков) 1.
Ширина волокон (столбиков) 1 примерно равна ширине фотодиодов в линейках 2а и 2в. Примерно означает, что возможно небольшое отклонение, связанное с различиями в размерах фотодиодов и сцинтилляционных волокон (столбиков). Если толщина сцинтиллятора 40 и толщина линеек 2а и 2в сильно отличаются, то они соединяются (приклеиваются) через оптический согласователь (фокон), который на Фиг.2 позиция А не показан. Ширина сцинтиллятора 40 определяется вдоль направления 35, перпендикулярного направлению ориентации волокон (столбиков) 1. Направление 35 и ось 25 перпендикулярны.
Использование высокочувствительных фотодиодных линеек 2 не является обязательным в устройстве Фиг.2, вместо них можно использовать, например, многоканальные щелевые ФЭУ (например, японской фирмы Hamamatsu), что не нарушит работоспособность устройства, но несколько увеличит его размеры.
В предлагаемом решении Фиг.2 позиция С отдельные тонкие сцинтилляционные волокна укладывают так, чтобы образовалась толщина сцинтиллятора, необходимая для эффективного поглощения излучения заданной энергии. Ширину набора организуют такой, чтобы получить пространственное разрешение и ширину стрип-детектора требуемого значения. Технология изготовления структурированных сцинтилляторов аналогична используемой в современных цифровых детекторах рентгеновского излучения. Длина сцинтиллятора в этих детекторах не превышает обычно долей сантиметра и определяется эффективностью поглощения излучения. В предлагаемом техническом решении длина сцинтилляционных волокон (столбиков) существенно больше и может составлять десятки сантиметров, и определяется потребной длиной стрипа.
В качестве сцинтилляционного материала можно использовать как пластиковые сцинтилляторы, так и минеральные сцинтилляторы, например на основе йодида цезия CsI. Стенки сцинтиллятора должны иметь либо зеркальный, либо диффузный отражатель. Зеркальный отражатель наносится путем напыления, например алюминия. Диффузный отражатель наносится путем покраски, например белой диффузной краской.
Возможны и другие варианты структурированных сцинтилляционных стрипов, например реализованные на основе использования капилляра с заполнением его жидким сцинтиллятором (для Фиг.2 позиция В) или набора мелких капилляров (Фиг.2 позиция А). В любом случае, чтобы реализовать режим стрип-детектора, соотношение длины к толщине такого структурированного сцинтиллятора должно быть намного больше, чем в известных структурированных сцинтилляторах.
Таким образом, отличительной особенностью предлагаемого изобретения по данному пункту является использование в стрип-детекторе структурированного сцинтиллятора, отношение длины которого к его толщине много больше единицы.
Использование усилителей - перемножителей - амплитудного дискриминатора 28 и двух линеек фотодиодов 2а и 2в в детекторе Фиг.2 определяется необходимостью компенсировать затухание световых вспышек внутри длинного сцинтиллятора 41 или 1. Если свойства сцинтиллятора 41 или 1 таковы, что затухание световых вспышек в материале сцинтиллятора незначительно, то можно обойтись без схемы компенсации затухания. В этом случае можно использовать только одну линейку фотодиодов, например 2а, и вместо усилителя - перемножителя - амплитудного дискриминатора 18 использовать просто усилитель - амплитудный дискриминатор, что не влияет на работоспособность устройства в этом случае.
При слабом затухании световых вспышек в материале сцинтиллятора вместо усилителя - перемножителя - амплитудного дискриминатора 18 возможно также использовать усилитель - сумматор - амплитудный дискриминатор на два входа (для каждого стрипа).
Работает стрип-детектор, представленный на Фиг.2 (вариант А или В), следующим образом. Детектор размещают относительно коллиматора 7 таким образом, чтобы направление сцинтилляционных волокон было параллельно щелям коллиматора 7 - Фиг.1 (направление 35 перпендикулярно щелям коллиматора 7). От средства управления 19 подают сигнал управляющему блоку 29 на начало измерения. Вспышки света, возникающие в сцинтилляторе 41 или 1, под действием излучения 3, распространяются вдоль сцинтиллятора до попадания на фотодиодные линейки 2а и 2в. Вырабатываемый электрический сигнал от линеек 2а и 2в поступает на входы усилителя - перемножителя - амплитудного дискриминатора 28, где усиливается и перемножается. Результат перемножения и дискриминации подается на вход средства сбора данных 18. Далее происходит обработка измеренных данных в соответствии с подходом, описанным при работе всего устройства, показанного на Фиг.1.
Поскольку линейки фотодиодов и сцинтилляторы на основе йодида цезия или пластиковые сцинтилляторы являются достаточно дешевыми компонентами, применяя предлагаемое техническое решение можно создать стрип-детектор большой площади, малой толщины и низкой себестоимости, по сравнению, например, с детектором на основе теллурида кадмия. В отличие от технических решений [3] с использованием линейки детекторов на теллуриде кадмия малой площади предлагаемый детектор будет обладать большой площадью и, следовательно, высокой эффективностью регистрации излучения.
Возможность создания детектора с высокой эффективность регистрации является очень важным в медицинских применениях, поскольку позволяет либо сократить время проведения исследования, либо сократить количество вводимого радионуклида.
Кроме того, такой детектор можно сделать малым по толщине и неохлаждаемым, что является немаловажным при построении устройства.
Более радикальным вариантом удешевления устройства является использование координатно нечувствительного детектора в качестве стрип-детектора.
На Фиг.3 показан стрип-детектор, построенный на основе координатно нечувствительного детектора. Стрип-детектор содержит сцинтиллятор большой площади 4 и соединенный с ним фотодетектор (фотоумножитель) большой площади 5, образующие координатно нечувствительный детектор большой площади излучения радионуклида (на фиг.3 части 4 и 5 детектора специально разделены для большей наглядности). Перед этим детектором излучения помещен экран 6, соединенный со средством его линейного перемещения 23. При этом экран 6 изготовлен таким образом, что его прозрачность для излучения радионуклида периодически неоднородна вдоль направления его перемещения 8. Период повторения неоднородности экрана 23 равен ширине детектора. Вход средства перемещения 23 экрана 6 соединен со средством управления 19, а выход детектора 5 соединен со входом усилителя - амплитудного дискриминатора 49, выход которого соединен со входом системы сбора данных 18.
Работает такой стрип-детектор следующим образом. Детектор размещают относительно коллиматора 7 таким образом, чтобы направление движения 8 экрана 6 было перпендикулярно щелям коллиматора 7 - Фиг.1. При этом направление 8 параллельно направлению 35, определяющему ширину стрип-детектора 9 - Фиг.2. От средства управления 19 подают сигнал средству 23 на начало линейного перемещения экрана 6. В результате линейного движения экрана 6 на выходе фотодетектора большой площади 5 возникает сигнал, определяемый операцией математической свертки искомого сигнала (плоскостного интеграла) и распределения неоднородности в экране (смотри математические основы). Сигнал с выхода фотодетектора 5 поступает на вход усилителя - амплитудного дискриминатора 49, с выхода которого поступает на вход системы сбора данных 18, с выхода которой передается на вход процессора обработки данных 22, где осуществляется операция обратной циклической свертки [9] (смотри математические основы). Данная математическая задача решена академиком Тихоновым и относится к классу обратных некорректных задач [9]. Измерения на выходе усилителя - амплитудного дискриминатора 49 производят в дискретные моменты времени и решение обратной задачи производят в процессоре 22 в дискретном виде. Интервал времени Δt, через который производят измерения, определяет то пространственное разрешение, которое будет иметь данный стрип-детектор. Число стрипов N, длина перемещения экрана S, скорость его перемещения V и интервал дискретизации Δt завязаны соотношением (23).
Назначение усилителя - амплитудного дискриминатора 49 является стандартным - это предварительное усиление до необходимого уровня сигнала и его амплитудный анализ. Поэтому этот усилитель - амплитудный дискриминатор 49 может быть выполнен по любой стандартной схеме, используемой, например, в ядерной физике.
Несмотря на то что при указанном подходе возможно использование практически любой периодической неоднородности в экране, немаловажным является задача максимизации отношения сигнал/шум в условиях шумов и дискретных измерений. Решение такой задачи в условиях дискретного измерения известно на основе массивов с плоскими боковыми лепестками и одним максимумом в автокорреляционной функции - URA массивы [10].
Эти массивы состоят из единиц и нулей, типа 10100111001 ... Реализация их на практике требует всего лишь проделывания отверстий в непрозрачном для излучения радионуклида экране, который можно сделать из материала с высоким атомным номером (свинец, вольфрам и т.д.). Такой материал является тяжелым по весу, и средство для его линейного перемещения 23 должно быть достаточно мощным.
Возможно дальнейшее усовершенствование устройства стрип-детектора путем устранения тяжелого неоднородного экрана 6 и использования легкого неоднородного оптического экрана.
На Фиг.4 показан стрип-детектор 9 на основе сцинтиллятора 4 и фотодетектора большой площади 5, между которыми расположен легкий оптический экран 10, соединенный со средством его перемещения 24. При этом экран 10 изготовлен так, что является периодически неоднородным для оптического излучения (излучения сцинтиллятора) в направлении его движения 8. Период неоднородности экрана 10 равен ширине детектора 9. В этом случае вес оптического экрана 10 может быть минимальным, так как его можно изготовить, например, из черной плотной бумаги, фольги и пластика. Возможно использование и других материалов, что не является принципиальным.
Работает такой стрип-детектор следующим образом. Детектор размещают относительно коллиматора 7 таким образом, чтобы направление движения 8 экрана 10 было перпендикулярно щелям коллиматора 7 - Фиг.1. При этом направление 8 параллельно направлению 35, определяющему ширину стрип-детектора 9 - Фиг.2. От средства управления 19 подают сигнал средству 24 на начало линейного перемещения экрана 10. В результате линейного движения экрана 10 на выходе фотодетектора большой площади 5 возникает сигнал, определяемый операцией математической свертки искомого сигнала (плоскостного интеграла) и распределения периодической неоднородности в экране (смотри математические основы). Сигнал с выхода фотодетектора 5 поступает на вход усилителя - амплитудного дискриминатора 49, с выхода которого поступает на вход системы сбора данных 18, с выхода которой передается на вход процессора обработки данных 22, где осуществляется операция обратной циклической свертки [9]. Данная математическая задача решена академиком Тихоновым и относится к классу обратных некорректных задач [9]. Измерения на выходе усилителя - амплитудного дискриминатора 49 производят в дискретные моменты времени и решение обратной задачи производят в процессоре 22 в дискретном виде. Интервал времени Δt, через который производят измерения, определяет то пространственное разрешение, которое будет иметь данный стрип-детектор. Число стрипов N, длина перемещения экрана S, скорость его перемещения V и интервал дискретизации Δt завязаны соотношением (23).
Назначение усилителя - амплитудного дискриминатора 49 является стандартным - это предварительное усиление до необходимого уровня сигнала и его амплитудный анализ. Поэтому этот усилитель - амплитудный дискриминатор 49 может быть выполнен по любой стандартной схеме используемой, например, в ядерной физике.
Возможно дальнейшее усовершенствование устройства стрип-детектора путем устранения возвратно-поступательного движения неоднородного оптического экрана и использования непрерывного движения неоднородного оптического экрана.
На Фиг.5 показан стрип-детектор 9 на основе сцинтиллятора 4 и фотодетектора большой площади 5, между которыми расположен легкий оптический экран 34, соединенный со средством его перемещения 30. При этом экран 34 изготовлен в виде гибкого кольца так, что является периодически неоднородным для оптического излучения (излучения сцинтиллятора) в направлении его движения 48. В этом случае вес оптического экрана может быть минимальным, так как его можно изготовить, например, из черной плотной бумаги, фольги и пластика. Возможно использование и других материалов, что не является принципиальным.
В качестве средства перемещения 30 может быть использовано любое средство, обеспечивающее движение экрана 34, аналогичное движению ленточного транспортера, используемого, например, при строительстве.
Работает такой стрип-детектор следующим образом. Детектор размещают относительно коллиматора 7 таким образом, чтобы направление движения 48 экрана 34 было перпендикулярно щелям коллиматора 7 - Фиг.1. При этом направление 48 параллельно направлению 35, определяющему ширину стрип-детектора 9 - Фиг.2. От средства управления 19 подают сигнал средству 30 на начало перемещения экрана 34. В результате движения экрана 34 на выходе фотодетектора большой площади 5 возникает сигнал, определяемый операцией математической свертки искомого сигнала (плоскостного интеграла) и распределения неоднородности в экране (смотри математические основы). Сигнал с выхода фотодетектора 5 поступает на вход усилителя - амплитудного дискриминатора 49, с выхода которого на вход системы сбора данных 18, с выхода которой передается на вход процессора обработки данных 22, где осуществляется операция обратной циклической свертки [9]. Данная математическая задача решена академиком Тихоновым и относится к классу обратных некорректных задач [9]. Измерения на выходе усилителя - амплитудного дискриминатора 49 производят в дискретные моменты времени и решение обратной задачи производят в процессоре 22 в дискретном виде. Интервал времени Δt, через который производят измерения, определяет то пространственное разрешение, которое будет иметь данный стрип-детектор. Число стрипов N, длина перемещения экрана S, скорость его перемещения V и интервал дискретизации Δt завязаны соотношением (23).
Назначение усилителя - амплитудного дискриминатора 49 является стандартным - это предварительное усиление до необходимого уровня сигнала и его амплитудный анализ. Поэтому этот усилитель - амплитудный дискриминатор 49 может быть выполнен по любой стандартной схеме, используемой, например, в ядерной физике
Возможно дальнейшее усовершенствование устройства стрип-детектора, путем устранения механического движения оптического экрана.
В настоящее время известны оптические пространственно временные модуляторы, например, на основе жидких кристаллов, используемые в проекционных телевизорах или дисплеях. С учетом этого предлагаемое техническое решение можно несколько модифицировать, устранив движение оптического экрана, использовав вместо него пространственно временной оптический модулятор, соединенный со средством его управления.
На Фиг.6 показан стрип-детектор 9, содержащий сцинтиллятор 4 и фотодетектор большой площади 5, между которыми расположен оптический пространственно-временной модулятор 26, соединенный со средством его управления 27.
В качестве пространственно-временного оптического модулятора использован жидкокристаллический оптический модулятор, применяемый в проекционных телевизорах, либо жидкокристаллический оптический пространственно-временной модулятор большой площади, применяемый в плоских пассивных компьютерных мониторах.
Допускается использование других известных типов пространственно-временных оптических модуляторов, например дискретных цифровых зеркал [7], что не влияет на работоспособность устройства.
В случае, если требуется согласовать размер сцинтиллятора 4 и координатно нечувствительного фотодетектора 5, между ними можно установить оптический согласователь (фокон). В этом случае пространственно-временной оптический модулятор 26 следует устанавливать до или после оптического согласователя, в соответствии с размерами модулятора. На Фиг.6 оптический согласователь (фокон) не показан.
Оптическая прозрачность модулятора должна изменяться во времени таким образом, чтобы приводить к результату, аналогичному движению оптического экрана, то есть сигнал на выходе фотодетектора 5 должен определяться как результат математической свертки искомого сигнала (плоскостного интеграла) и неоднородности экрана (смотри математические основы).
Работает такой стрип-детектор следующим образом. Детектор размещают относительно коллиматора 7 таким образом, чтобы направление изменения прозрачности модулятора 26 было перпендикулярно щелям коллиматора 7 - Фиг.1, то есть параллельно направлению 35, определяющему ширину стрип-детектора 9 - Фиг.2. От средства управления 19 подают сигнал средству 27 на установление начального распределения прозрачности модулятора 26. В результате изменения прозрачности модулятора во времени по командам от средства управления 19 на выходе фотодетектора большой площади 5 возникает сигнал, определяемый операцией математической свертки искомого сигнала (плоскостного интеграла) и распределения неоднородности в экране (смотри математические основы). Сигнал с выхода усилителя - амплитудного дискриминатора 49 поступает на вход системы сбора данных 18, с выхода которой передается на вход процессора обработки данных 22, где осуществляется операция обратной циклической свертки [9]. Данная математическая задача решена академиком Тихоновым и относится к классу обратных некорректных задач [9]. Измерения на выходе детектора 5 производят в дискретные моменты времени и решение обратной задачи производят в процессоре 22 в дискретном виде. Интервал времени Δt, через который производят измерения, определяет то пространственное разрешение, которое будет иметь данный стрип-детектор. Число стрипов N, длина перемещения экрана S, скорость его перемещения V и интервал дискретизации Δt завязаны соотношением (23).
Назначение усилителя - амплитудного дискриминатора 49 является стандартным - это предварительное усиление до необходимого уровня сигнала и его амплитудный анализ. Поэтому этот усилитель - амплитудный дискриминатор 49 может быть выполнен по любой стандартной схеме, используемой, например, в ядерной физике.
Указанное техническое решение можно использовать как при параллельном расположении пластин в коллиматоре, так и при конвергентном и дивергентном. Если ограничиться только дивергентным коллиматором, то техническое решение можно еще более упростить и соответственно еще более удешевить устройство, оставив только один стрип в стрип-детекторе.
В дивергентном случае, оставив вместо множества стрипов только один стрип и применив движущийся неоднородный экран для излучения радионуклида, можно создать устройство без использования многощелевого коллиматора.
На Фиг.7 показан стрип-детектор 9 для дивергентной геометрии, содержащий один стриповый сцинтиллятор 1, к торцу которого прикреплен (приклеен) фотодиод 2. Выход фотодиода 2 (линейки, состоящей из одного элемента) соединен с входом усилителя - амплитудного дискриминатора 31, выход которого соединен со средством сбора данных 18. При этом между стрип-сцинтиллятором 1 и излучением 3 (от радионуклида 47 объекта 12) расположен экран 6, периодически неоднородный в направлении его движения 8 для излучения радионуклида 47. Экран 6 соединен со средством его линейного передвижения 23, вход которого соединен со средством управления 19.
Работает такой стрип-детектор следующим образом. Детектор размещают относительно излучения 3 таким образом, чтобы направление движения 8 экрана 6 было перпендикулярно излучению 3. При этом направление 8 параллельно направлению 35, определяющему ширину сцинтиллятора 40 - Фиг.2. От средства управления 19 подают сигнал средству 23 на начало линейного перемещения экрана 6. В результате линейного движения экрана 6 на выходе фотодетектора большой площади 5 возникает сигнал, определяемый операцией математической свертки искомого сигнала (плоскостного интеграла) и распределения неоднородности в экране (смотри математические основы). Сигнал с выхода фото детектора 5 поступает на вход усилителя - амплитудного дискриминатора 31, с выхода которого на систему сбора данных 18, с выхода которой передается на вход процессора обработки данных 22, где осуществляется операция обратной циклической свертки [9]. Данная математическая задача решена академиком Тихоновым и относится к классу обратных некорректных задач [9]. Измерения на выходе усилителя - амплитудного дискриминатора 31 производят в дискретные моменты времени и решение обратной задачи производят в процессоре 22 в дискретном виде. Интервал времени Δt, через который производят измерения, определяет то пространственное разрешение, которое будет иметь данный стрип-детектор. Число стрипов N, длина перемещения экрана S, скорость его перемещения V и интервал дискретизации Δt завязаны соотношением (23).
Назначение усилителя - амплитудного дискриминатора 31 является стандартным - это предварительное усиление до необходимого уровня сигнала и его амплитудный анализ. Поэтому этот усилитель - амплитудный дискриминатор 31 может быть выполнен по любой стандартной схеме, используемой, например, в ядерной физике. Отличие 31 от 49 состоит в том, что вход 31 рассчитан на подключение к фотодиоду, вход 49 на подключение к ФЭУ.
Эффективность регистрации излучения в описанном стрип-детекторе будет аналогичной случаю использования детектора большой площади и движущемуся экрану, указанному ранее. Объясняется это тем, что сцинтиллятор выступает в роли интегратора вспышек, поступающих от всех направлений (как и в случае детектора большой площади). При этом сам интегратор в дивергентном случае можно сделать в виде одного стрипа. В этом случае устройство получается более простым и соответственно более дешевым. Характер сигнала на выходе такого детектора будет аналогичен сигналу, описанному ранее, то есть представлять собой операцию математической свертки искомого сигнала (плоскостного интеграла) и распределения неоднородности в экране. Для получения искомого сигнала (плоскостного интеграла) необходимо произвести операцию обратной математической свертки [9].
Если длина стрипа минимальна (например, равна его ширине и высоте) - Фиг.7, устройство получается весьма дешевым. В этом случае фактически используется маленький кусочек сцинтиллятора, прикрепленный к фотодиоду. Однако, если использовать стрип малой длины, то эффективность регистрации излучения будет низкой. Поэтому несмотря на принципиальную возможность использования короткого стрипа, желательно использовать длинный стрип. Короткий стрип можно использовать тогда, когда интенсивность излучения радионуклида достаточно высока.
Если затухание оптических вспышек в материале длинного сцинтиллятора велико, то следует использовать схему коррекции ослабления на основе двух фотодиодов, расположенных с противоположных концов сцинтиллятора и усилителя - перемножителя - амплитудного дискриминатора, что было описано ранее для Фиг.2.
Для дивергентного случая возможно дальнейшее совершенствование стрип-детектора путем устранения возвратно-поступательного движения неоднородного экрана и использования вместо него неоднородного вращающегося барабана.
На Фиг.8 показан стрип-детектор 9 для дивергентной геометрии, содержащий один стриповый сцинтиллятор 1, к торцу которого прикреплен (приклеен) фотодиод 2, выход которого соединен со входом усилителя - амплитудного дискриминатора 31, выход которого соединен со средством сбора данных 18. При этом вокруг стрип сцинпцлятора 1, коаксиально с ним, расположен вращающийся барабан 32, неоднородный в направлении его вращения 33 для излучения радионуклида 47. Барабан 33 соединен со средством его вращения 30, вход которого соединен со средством управления 19.
Работает такой стрип-детектор следующим образом. Детектор размещают относительно излучения 3 таким образом, чтобы направление вращения 33 барабана 32 было перпендикулярно излучению 3. То есть ось вращения барабана 32 перпендикулярна направлению 35, определяющему ширину сцинтиллятора 40 - Фиг.2. От средства управления 19 подают сигнал средству 30 на начало вращения барабана 32. В результате вращения барабана 32 на выходе фотодетектора большой площади 5 возникает сигнал, определяемый операцией математической свертки искомого сигнала (плоскостного интеграла) и распределения неоднородности в экране (смотри математические основы). Сигнал с выхода фотодетектора 5 поступает на вход усилителя - амплитудного дискриминатора 31, с выхода которого на вход системы сбора данных 18, с выхода которой передается на вход процессора обработки данных 22, где осуществляется операция обратной свертки [9]. Данная математическая задача решена академиком Тихоновым и относится к классу обратных некорректных задач [9]. Измерения на выходе детектора 5 производят в дискретные моменты времени и решение обратной задачи производят в процессоре 22 в дискретном виде. Интервал времени Δt, через который производят измерения, определяет то пространственное разрешение, которое будет иметь данный стрип-детектор. Число стрипов N, длина перемещения экрана S, скорость его перемещения V и интервал дискретизации Δt завязаны соотношением (23).
Назначение усилителя - амплитудного дискриминатора 31 является стандартным - это предварительное усиление до необходимого уровня сигнала и его амплитудный анализ. Поэтому этот усилитель - амплитудный дискриминатор 31 может быть выполнен по любой стандартной схеме, используемой, например, в ядерной физике. Отличие 31 от 49 состоит в том, что вход 31 рассчитан на подключение к фотодиоду, вход 49 на подключение к ФЭУ.
Когда длина стрипа минимальна (например, равна его ширине и высоте) - Фиг.8, устройство получается максимально дешевым. В этом случае фактически используется маленький кусочек сцинтиллятора, прикрепленный к фотодиоду. Однако, если использовать стрип малой длины, то эффективность регистрации излучения будет низкой. Поэтому несмотря на принципиальную возможность использования короткого стрипа желательно использовать длинный стрип. Короткий стрип можно использовать тогда, когда интенсивность излучения радионуклида достаточно высока.
Если затухание оптических вспышек в материале длинного сцинтиллятора велико, то следует использовать схему коррекции ослабления на основе двух фотодиодов, расположенных с противоположных концов сцинтиллятора и усилителя - перемножителя - амплитудного дискриминатора, что было описано ранее для Фиг.2.
Для эффективной регистрации гамма-квантов большой энергии (более 100 кэВ) сечение сцинтиллятора в технических решениях Фиг.7 и Фиг.8 должно быть достаточно большим. Однако при большой сечении сцинтиллятора уменьшается пространственное разрешение в реконструируемом изображении (из-за большой ширины стрипа). Чтобы обеспечить одновременно высокую эффективность регистрации и высокое пространственное разрешение необходимо использовать сцинтиллятор необходимого сечения (для эффективной регистрации квантов требуемой энергии) и свинцовую "рубашку" вокруг сцинтиллятора с продольной щелью требуемой ширины вдоль сцинтиллятора - Фиг.9.
На Фиг.9 позиция А и В показано поперечное сечение сцинтиллятора, совмещенного с "рубашкой" защиты. Ширина щели в "рубашке" определяет требуемое пространственное разрешение, а угол раскрыва щели ψ определяет область объекта, охватываемую детектором. Угол ψ должен быть не более периода повторения неоднородности в барабане 32 - Фиг.8.
В позиции А - Фиг.9 угол раскрыва щели ψ меньше, чем в позиции В, при этом ширина щели одинакова и в той и в другой позиции.
Применение такого технического решения, помимо основного назначения, позволяет резко снизить вес защитной "рубашки", что может быть существенным при создании мобильных устройств. Это справедливо как для технического решения, показанного на Фиг.7, так и на Фиг.8.
Использование защитной "рубашки" необходимо во всех предлагаемых технических решениях, но место ее положения и назначения являются общеизвестными, поэтому на фигурах, поясняющих другие технические решения, не показано. Защита показана там, где ее положение и назначение не является общеизвестным.
Предложенные технические решения можно подвергнуть дальнейшему совершенствованию, применяя вместо многощелевого коллиматора иной тип коллиматора.
Вместо многощелевого коллиматора 7 для технических решений на основе Фиг.2, Фиг.3, Фиг.4, Фиг.5 и Фиг.6 можно использовать однощелевой коллиматор.
На Фиг.10 показан однощелевой коллиматор, для технических решений Фиг.2, Фиг.3, Фиг.4, Фиг.5 и Фиг.6, изготовленный в виде плоского экрана с одной щелью - позиция А, и в виде экрана сложной формы с одной щелью - позиция В.
На Фиг.10 позиция А показан однощелевой коллиматор, состоящий из плоского экрана 37, не прозрачного для излучения радионуклида, в котором проделана щель 39, длина которой равна длине щелей в многощелевом коллиматоре, а ширина пропорциональна требуемому пространственному разрешению в реконструируемом изображении. Одной стороной экран 37 обращен к стрип-детектору 9, а другой направлен в сторону излучения 3. Щель 39 параллельна стрипам стрип-детектора 9.
На Фиг.10 позиция В показан однощелевой коллиматор, состоящий из экрана 38, по форме соответствующий призме с одной открытой стороной. Напротив открытой стороны экрана 38 в ребре призмы расположена одна щель 39, длина которой равна длине щелей в многощелевом коллиматоре, а ширина пропорциональна требуемому пространственному разрешению в реконструируемом изображении радионуклида. Открытой стороной экран 38 направлен в сторону стрип-детектора 9, а щелью 39 в сторону излучения 3. Щель 39 параллельна стрипам стрип-детектора 9.
Сложная форма экрану 38 придана с целью устранения влияния посторонних излучений, приходящих с боковых направлений.
Данный коллиматор Фиг.10 позиции А и В по своим функциям аналогичен пинхольному коллиматору в гамма-камерах типа Анже. Расстояние d, на котором расположена щель 39 от стрип-детектора 9, и расстояние на котором расположена щель 39 от объекта 12 определяют геометрическое увеличение β исследуемого объекта по известной формуле:
Для устранения влияния фактора 1/r на результат реконструкции щель 39 смещают относительно оси вращения системы детектор-коллиматор 25 на угол δ, пропорциональный требуемому пространственному разрешению в реконструируемом изображении и находящийся в пределах от 0 до 5 градусов (смотри математические основы).
Использование одной щели и отсутствие многощелевого коллиматора, помимо указанных преимуществ, позволяет снизить стоимость устройства и получать изображения требуемого геометрического увеличения.
На Фиг.13 показана схема расположения однородного фантома 42 и системы детектор-коллиматор 11 при проведении калибровочных измерений.
Процедура калибровки требуется для всех вариантов предлагаемого технического решения, поскольку измеренные значения интенсивности излучения содержат искажения, вызванные различными причинами.
При использовании многощелевого коллиматора прозрачность отдельных щелей невозможно сделать абсолютно идентичной. Невозможно также сделать абсолютно идентичным и усиление в каждом стрипе стрип-детектора. При использовании однощелевого коллиматора (пинхольного) возникают искажения, связанные с различной удаленностью частей объекта до детектора. Аналогичные искажения возникают и при использовании в качестве стрип-детектора одного стрипа и движущегося неоднородного экрана.
Все перечисленные искажения относятся к мультипликативным, то есть искажениям, вызванным умножением измеряемой величины (интенсивности излучения) на некий неизвестный множитель. Если этот неизвестный множитель измерить и поделить измеренные значения на его величину, то искажения исчезнут. Если искажения не устранять, то в реконструируемом изображении появятся кольцевые артефакты. В известных технических решениях [3, 4] эта проблема не рассматривалась.
В данном техническом решении, как и в гамма-камерах Анже, предлагается решать эту проблему путем измерения интенсивности излучения от однородного фантома 42.
Калибровочные измерения - Фиг.13 проводят без вращения системы детектор-коллиматор 11 вокруг оси 25.
Длина 45 однородного фантома 42 должна превышать диаметр исследуемой области объекта 14, не менее чем на 50%, а ширина 46 примерно равна диаметру исследуемой области объекта 14, при нахождении системы детектор-коллиматор 11 от объекта 14 на расстоянии 44, аналогичном расстоянию, используемому при реальном исследовании объекта 14. Толщина фантома 42 должна быть минимально возможной, например около 5-10 мм, чтобы не вносить дополнительных искажений в процесс калибровки, связанных с толщиной.
Чтобы провести калибровочные измерения однородный фантом 42 располагают на подставке или столе (не показаны) таким образом, чтобы длинная ось 43 фантома 42 была параллельна направлению 35, определяющему ширину стрип-детектора 9. Проще всего это сделать, если предварительно сориентировать ось 11 в горизонтальной плоскости, тогда достаточно поместить фантом 42 на горизонтальную плоскость и повернуть его так, чтобы ось 43 заняла положение, параллельное направлению 35. Точность ориентации осей относительно друг друга должна быть не хуже одного градуса.
После того как фантом 42 сориентирован нужным образом, проводят измерения без вращения относительно оси 25. Количество квантов, измеренных каждым стрипом при калибровке (непосредственно или после де конволюции, что зависит от реализации стрип-детектора), должно быть не менее 106, чтобы ошибка измерений была не более 10-3. При этом фантом 42 располагают относительно системы детектор-коллиматор 11 на расстоянии 44, аналогичном расстоянию, используемому при реальном исследовании объекта 14.
После того как калибровочные измерения проведены, значения интенсивности излучения нормируют по максимуму, то есть приводят к единице. После нормировки проводят калибровку по формуле (19) (смотри математические основы).
Проведение калибровки, как отмечалось, позволяет устранить кольцевые артефакты в реконструируемом изображении объекта.
На Фиг.14 представлено экспериментальное устройство для проверки работоспособности одного предлагаемого технического решения, показанного на Фиг.3. Устройство реализует вариант стрип-детектора, построенного на основе сцинтиллятора и фотодетектора большой площади, между которыми и многощелевым коллиматором расположен подвижный экран неоднородный для излучения радионуклида в направлении его движения.
Многощелевой коллиматор изготовлен на основе набора параллельных пластин. Пластины коллиматора изготовлены на основе бронзовой фольги толщиной 100 мкм с наклеенными свинцовыми накладками толщиной 200 мкм. Ширина щелей в многощелевом коллиматоре равна 1,6 мм, количество щелей - 63, длина щелей - 100,8 мм, высота пластин коллиматора 50 мм.
Экран изготовлен из сплава Розе (висмут - 58%, свинец - 30%, олово - 12%) толщиной 5 мм и содержит неоднородность в виде URA массива из 63 элементов, повторенных дважды, чтобы реализовать циклическую свертку. Отверстия соответствуют 1 в массиве URA, материал экрана соответствует 0 в массиве URA. Ширина отверстий равна 1,6 мм, длина отверстий равна 100,8 мм.
В качестве фотодетектора использован фотоумножитель ФЭУ-125 с диаметром входного окна 150 мм. В качестве сцинтиллятора использован йодид цезия CsI, толщиной 8 мм и диаметром 150 мм, прикрепленный к входному окну фотоумножителя с помощью липкой ленты. Для улучшения оптического контакта между сцинтиллятором и фотоумножителем их соприкасающиеся поверхности смазаны жидким вазелином.
Для упрощения конструкции всего экспериментального устройства был реализован режим сканирования, соответствующий двумерной реконструкции. Размер реконструируемой матрицы изображения равен 63×63 элемента. Количество отсчетов в "проекции" равно 63, число "проекций" равно 64.
Использовалась процедура калибровки измеренных данных на основе однородного фантома по описанной ранее методике и процедура дополнения данных на основе косинусной функции.
Измерения производились в клинических условиях, на реальных пациентах, проходящих обследование щитовидной железы радиоизотопными методами с использованием фармпрепарата, содержащего радионуклид Технеций Tc99м. Общая активность препарата, вводимого каждому пациенту, была равна 3 милликюри.
Результаты измерений для двух различных пациентов, имеющих патологию щитовидной железы, показаны на Фиг.14 позиция А и В соответственно, в сравнении с результатами обследования тех же пациентов на стандартной гамма-камере Millennium типа Анже, производства фирмы General Electric. Результаты, полученные на стандартном оборудовании, показаны в верхнем ряду, результаты, полученные на экспериментальном оборудовании, показаны в нижнем ряду.
Время обследования на гамма-камере Анже составляло 10 минут, на экспериментальном образце 15 минут. При этом собственное разрешение гамма-камеры Анже было - 6 мм, а экспериментального образца - 1,6 мм.
Анализ результатов экспериментальных измерений позволяет сделать вывод о правильности предлагаемых технических решений и возможности построения устройств на изложенных принципах.
Источники информации
1. Патент США 3,011,057, опубл. 1961.10.28.
2. Патент США 3,684,886, опубл. 1972.08.15.
3. Патент США 3,936,639, опубл. 1976.02.03.
4. Патент США 4,090,080, опубл. 1978.05.16.
5. Патент США 4,563,583, опубл. 1986.01.07.
6. Патент США 6,353,227 В1, опубл. 2002.03.05.
7. Патент США 6,627,893 В1, опубл. 2003.09.30.
8. Патент США 6,631,285 В2, опубл. 2003.10.07.
9. А.Н.Тихонов, В.Я.Арсенин "Методы решения некорректных задач", М., "Наука", 1986.
10. A.Busbom, H.Elders-Boll, and H.D.Schotten, "Uniformly Redundant Arrays", Experimental Astronomy 8: 97-123, 1998.
11. Г.Хермен "Восстановление изображений по проекциям. Основы реконструктивной томографии", перевод с английского Л.В.Барабина и А.Б.Мещерякова под ред. Л.М.Сороко, М., "Мир", 1983.
12. N. de Beaucoudrey, L.Garnero, J.P.Hugonin, "Improved tomographic X-ray microimaging of laser plasma by double multislit coding cameras", SPIE Vol.1140 X-Ray Instrumentation (1989) / 149.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ (ВАРИАНТЫ) | 1993 |
|
RU2071725C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА В РАССЕЯННОМ И/ИЛИ ПРОШЕДШЕМ ИЗЛУЧЕНИИ | 2004 |
|
RU2256169C1 |
| ДЕТЕКТИРУЮЩИЙ УЗЕЛ ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ | 2006 |
|
RU2331903C2 |
| ДЕТЕКТИРУЮЩИЙ УЗЕЛ ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ | 2006 |
|
RU2326410C1 |
| УЛЬТРАМАЛОУГЛОВАЯ РЕНТГЕНОВСКАЯ ТОМОГРАФИЯ | 1998 |
|
RU2145485C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОЕКЦИОННЫХ РЕНТГЕНОВСКИХ СНИМКОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545338C1 |
| РЕНТГЕНОГРАФИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2166749C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПЛОТНОСТИ ПЛАЗМЫ | 1968 |
|
SU213205A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ γ-ИЗЛУЧЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2370789C1 |
| ТВЕРДОТЕЛЬНЫЙ ДЕТЕКТОР НЕЙТРОНОВ | 2007 |
|
RU2413246C1 |

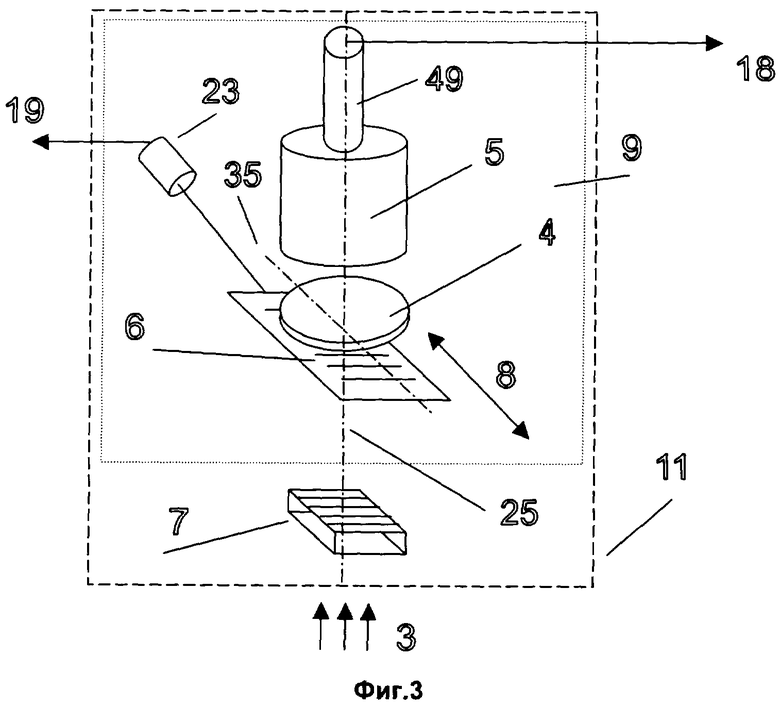
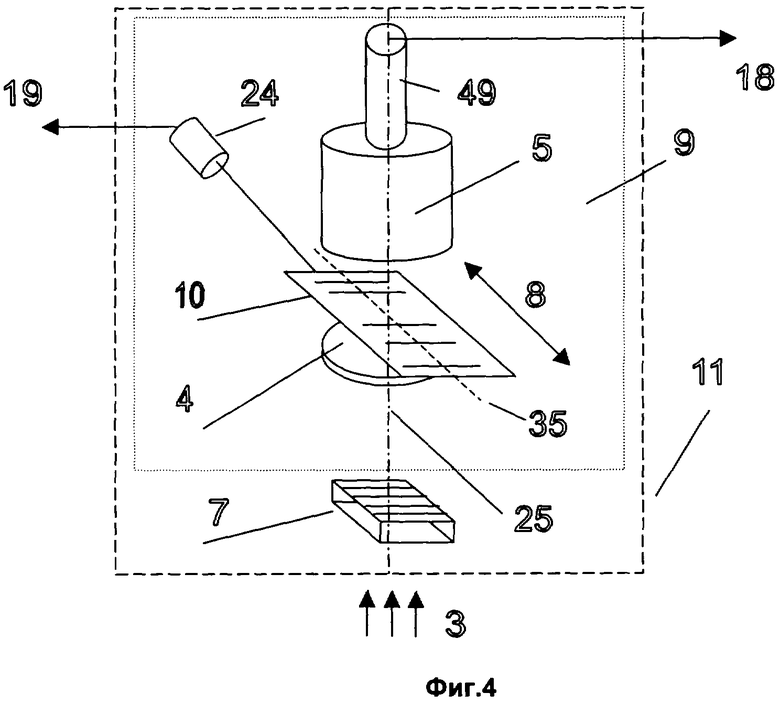
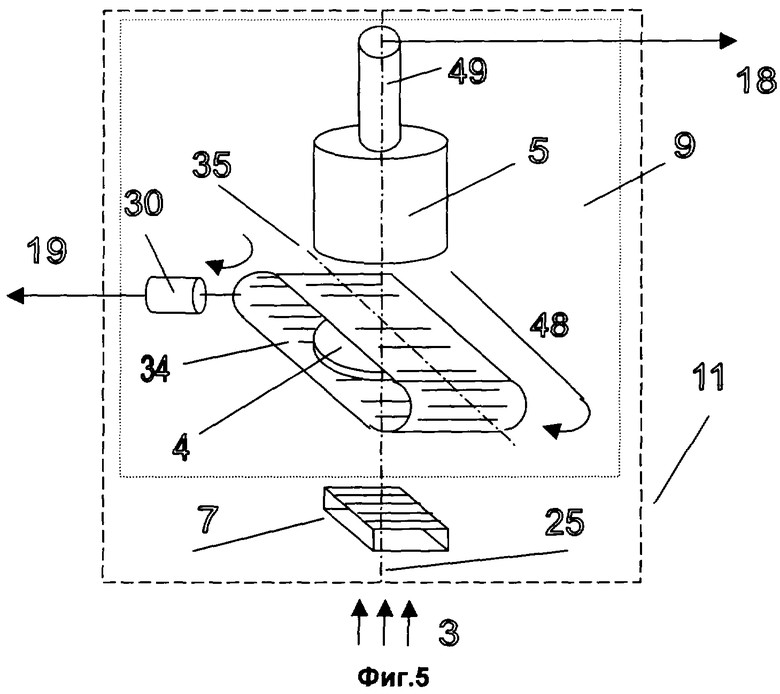
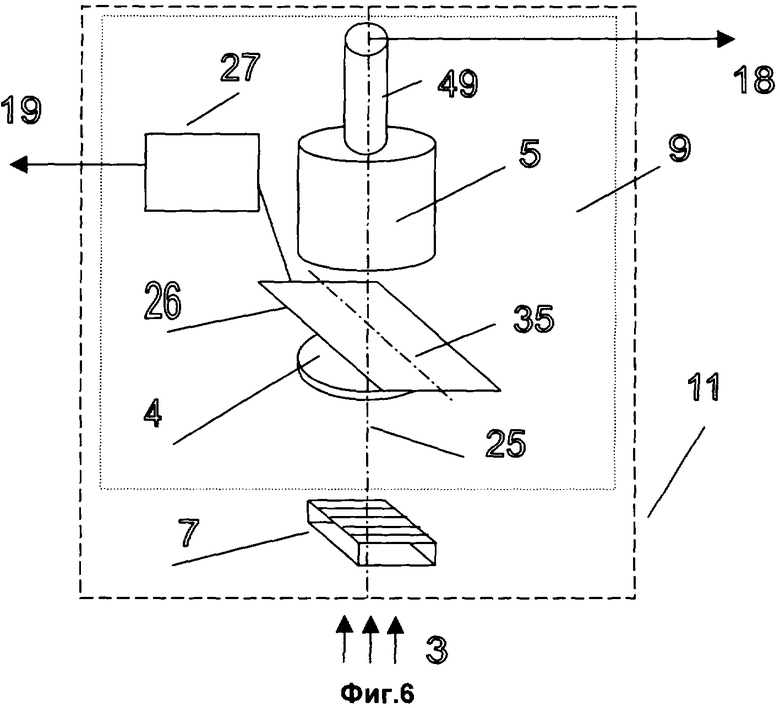
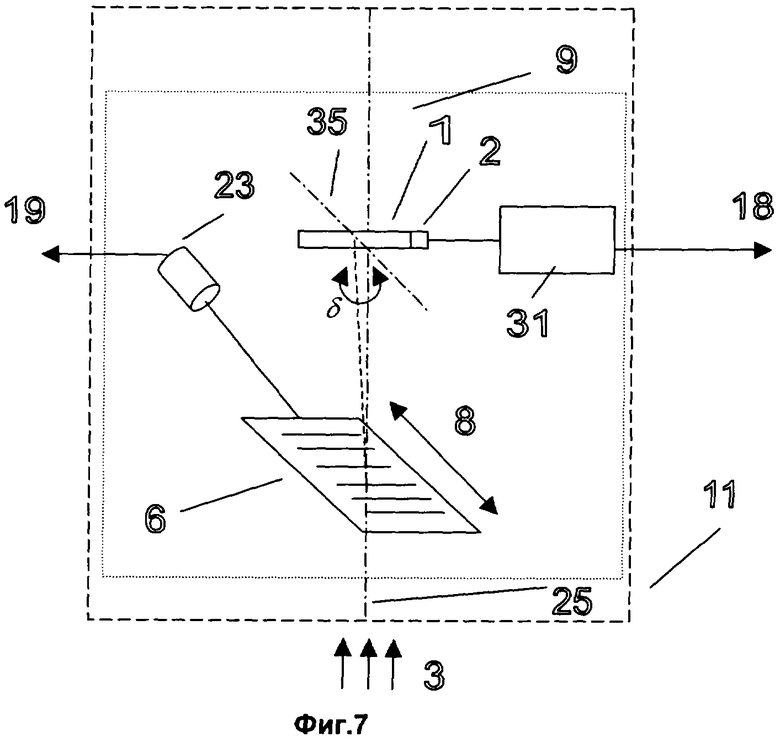
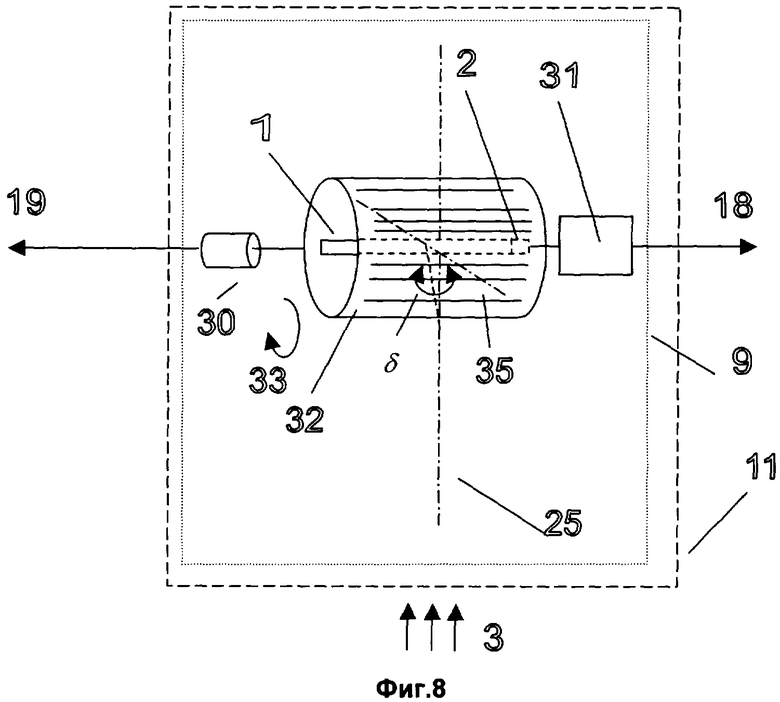
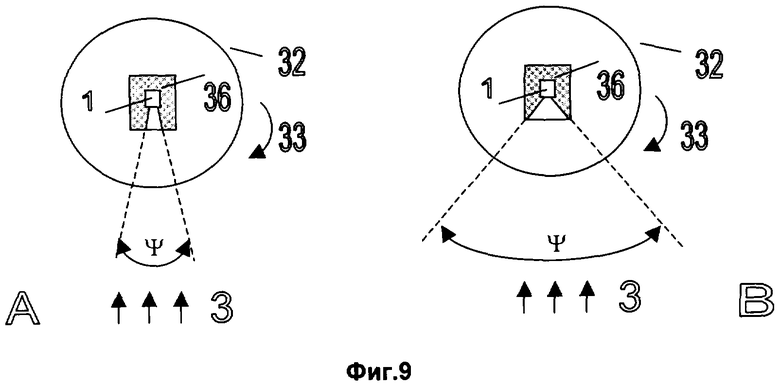
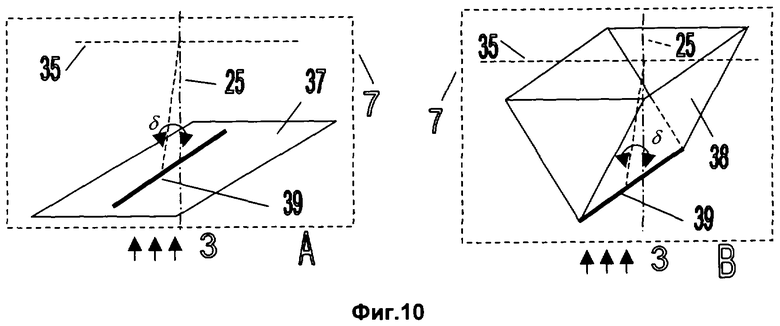
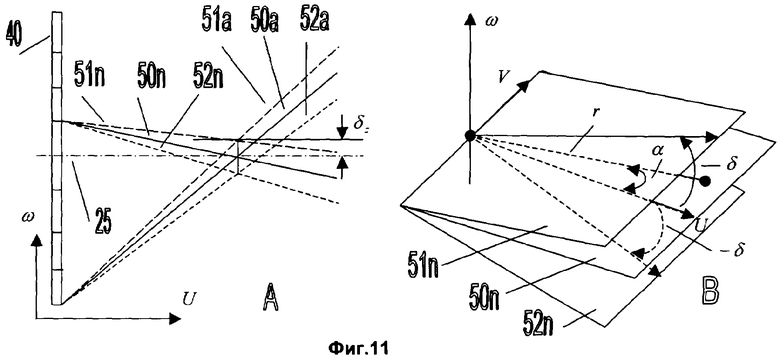
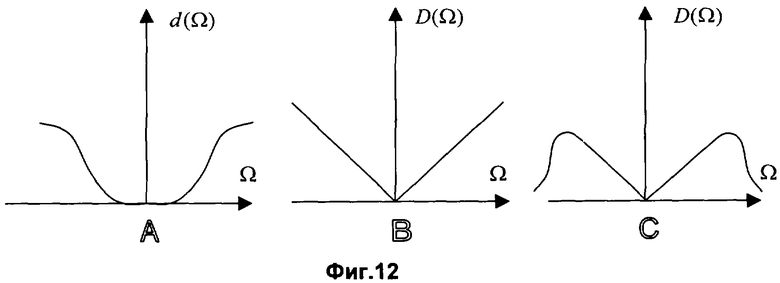
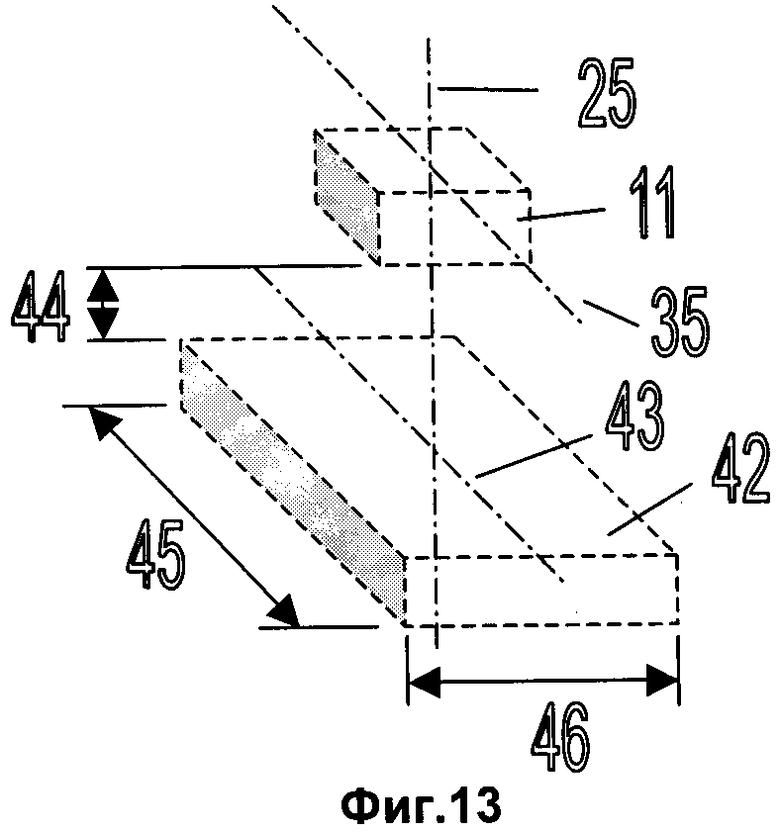
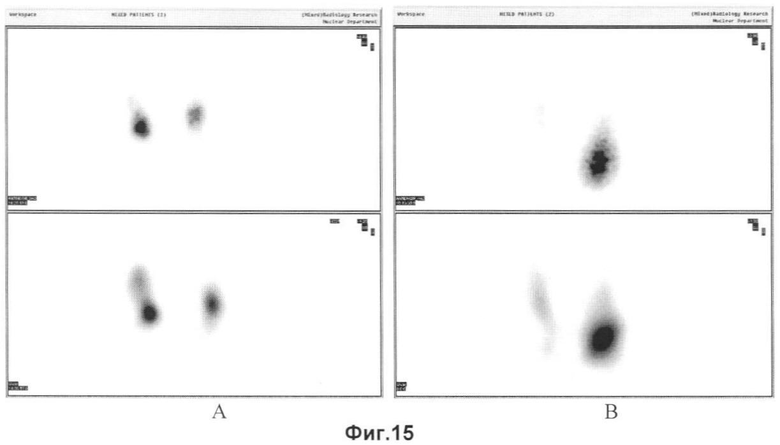
Изобретение может быть использовано в медицинской диагностике и при неразрушающем контроле. Способ включает измерение интенсивности излучения от радионуклида внутри объекта через многощелевой коллиматор 7 стрип-детектором 9, установленным у выхода коллиматора, вход которого направлен в сторону объекта 12, при различных угловых положениях системы 11 коллиматор-детектор относительно объекта и получение набора данных интенсивности излучения, аналогичных компьютерной томографии, с последующим применением к набору данных алгоритма реконструкции и визуализации результата реконструкции. Устройство содержит щелевой коллиматор 7, вход которого направлен в сторону исследуемого объекта 12, стрип-детектор 9 интенсивности излучения, установленный у выхода коллиматора, первое средство 15 вращения, предназначенное для поворота системы детектор-коллиматор вокруг продольной оси 14 исследуемого объекта, второе средство 16 вращения, предназначенное для поворота системы 11 детектор-коллиматор вокруг оси 25, перпендикулярной продольной оси исследуемого объекта, средство 18 измерения выходных сигналов стрип-детектора интенсивности излучения, средство (22, 20) запоминания и обработки измеренных данных и средство 21 визуализации результатов обработки. Технический результат - повышение точности восстановления распределения радиоактивного источника внутри исследуемого объекта либо сокращение времени проведения исследования или количества вводимого радионуклида. 2 н. и 6 з.п. ф-лы, 15 ил.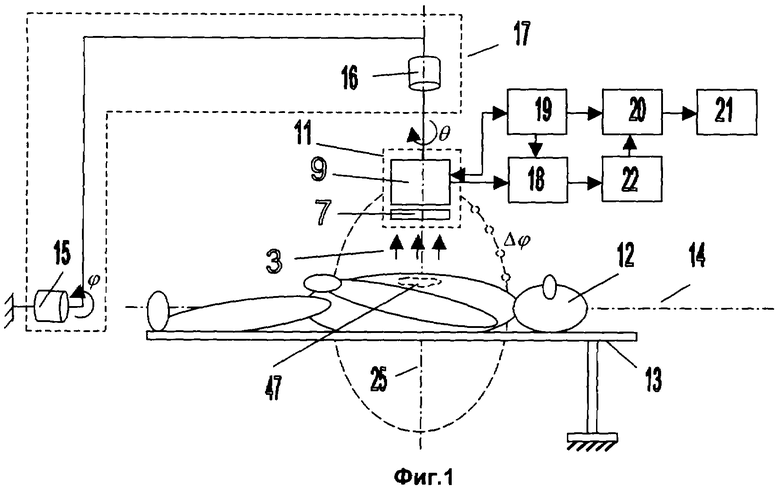
I(i)=A(i)/C(i),
где i - номер стрипа в детекторе,
I(i) - калиброванное значение измерения интенсивности излучения [имп/с],
A(i) - измеренное значение интенсивности излучения [имп/с],
C(i) - измеренная нормированная по максимуму интенсивность излучения от однородного фантома [безразмерная от 0 до 1].

где β - требуемое увеличение при проведении измерения [безразмерная от 0 до бесконечности],
d - расстояние от экрана до плоскости детектора [мм],
D - расстояние от экрана до объекта (расстояние до плоскости внутри объекта, параллельной экрану, относительно которой хотят иметь желаемое увеличение) [мм].

где M - число стрипов в детекторе;
K - число отсчетов в полном наборе данных;
i - номер дополнения, лежащий в диапазоне от 1 до K-М;
I(1) - измеренные значения интенсивности излучения для 1-го стрипа;
I(M) - измеренные значения интенсивности излучения для М-го стрипа;
ID(M+i) - дополненные значения интенсивности излучения.
| US 3936639 А, 03.02.1976 | |||
| US 4090080 А, 16.05.1978 | |||
| УЛЬТРАМАЛОУГЛОВАЯ РЕНТГЕНОВСКАЯ ТОМОГРАФИЯ | 1998 |
|
RU2145485C1 |
| РЕНТГЕНОРАДИОМЕТРИЧЕСКИЙ АНАЛИЗАТОР СОСТАВА ВЕЩЕСТВА | 2004 |
|
RU2281481C1 |

