Изобретение относится к геофизике и может быть использовано при создании глобальной системы сейсмического наблюдения Земли космическими средствами.
К настоящему времени известно множество долгосрочных и краткосрочных признаков-предвестников грядущего землетрясения, регистрируемых различными техническими средствами (систематизированный перечень известных признаков-предвестников см, например, «Данные о предвестниках» в книге Т.Рикитаке «Предсказание землетрясений», перев. с англ, М., Мир, 1979 г, стр.314-333).
Очаг землетрясения представляет собой некоторую неоднородность в земной коре с линейными размерами 150-300 км в диаметре, в которой аккумулируется энергия тектонических напряжений. В результате механических напряжений земной коры в области очага над очаговой зоной возникают аномалии других физических полей, которые могут быть обнаружены при дистанционном зондировании из космоса.
Известно устройство, использующее «Способ прогнозирования параметров землетрясения», Патент RU №2254599, 2005 г. - аналог.
В способе-аналоге получают изображения очага по двум взаимно ортогональным по поляризации каналам съемки с равными промежутками времени Δt между смежными витками, вычисляют математическое ожидание сигналов изображений поляризационных каналов, формируют синтезированную матрицу из попиксельных отношений амплитуд сигнала с большим математическим ожиданием к меньшему, последовательно, от начала синтезированной матрицы, разбивают изображение на фрагменты по четыре смежных пикселя, делят каждый четырехугольник диагональю на два смежных треугольника и по формуле Герона вычисляют их площади, находят площадь рельефа (Sp) поверхности изображения как сумму площадей мозаики треугольников всех фрагментов, по серии последовательных во времени снимков очага, отслеживают динамику изменения функции D=Sp/S0 шероховатости рельефа, по зависимости:
вычисляют постоянную времени экспоненты Т наблюдаемого процесса, рассчитывают ожидаемое время удара ty=4,7T и его магнитуду (М) из соотношения lg ty [сут]=0,54М-3,37, где t2-t1=Δt - интервал времени между двумя последовательными съемками; D1, D2 - вычисленные функции шероховатости рельефа в моменты t1, t2; D0 - предел шероховатости площади рельефа, при которой происходит «вспарывание» очага; S0 - геометрическая площадь синтезированной матрицы изображения из |m×n| пикселей.
Устройство, реализующее способ, содержит две соосные телекамеры с надетыми на их объективы, ортогональными относительно друг друга, поляризационными фильтрами и тракт обработки изображений.
К недостаткам аналога следует отнести:
- поскольку съемка осуществляется в видимом диапазоне, то измерения возможны только в дневное время и при отсутствии облачности. Если учесть, что время существования признака-предвестника менее суток, то способ-аналог не обеспечивает необходимую достоверность из-за большой вероятности пропуска события;
- для реализации аналога необходимо точное знание координат очага, которое априорно неизвестно;
- большие массивы информации, подлежащие передаче и обработке, сложность и неоперативность алгоритма расчета прогнозируемых параметров.
Ближайшим аналогом к заявляемому техническому решению является устройство, используемое в «Способе прогнозирования землетрясений», Патент RU №2262125, 2005 г. Ближайший аналог включает получение ортогональных по поляризации изображений подстилающей поверхности собственного СВЧ-излучения в виде зависимости амплитуды сигнала А(х, y) от пространственных координат многолучевой антенной с линейной поляризацией, формируют синтезированную матрицу из модулей попиксельных разностей изображений идентичных участков, получаемых на нисходящем и восходящем витках орбит космических аппаратов, в обработку включают те пиксели, где текущий модуль разности выше порогового, рассчитывают направляющий косинус текущего модуля разности:  и суммарную длину вектора
и суммарную длину вектора  отслеживают изменение длины вектора L по серии формируемых синтезированных матриц и вычисляют постоянную Т отслеживаемого процесса из соотношения:
отслеживают изменение длины вектора L по серии формируемых синтезированных матриц и вычисляют постоянную Т отслеживаемого процесса из соотношения:
прогнозируют время удара ty=4,7T и магнитуду: lg L0=0,46M-0,35, где:
n - количество пикселей синтезированной матрицы, поступающих в обработку;
Δt=t2-t1 - интервал времени между двумя формированиями синтезированной матрицы;
А1i, A2i - амплитуды идентичных пикселей изображений, получаемых на нисходящем и восходящем витках орбит;
L1, L2 - длина вектора поляризации в моменты t1, t2;
L0 - длина вектора поляризации в установившемся значении.
Обнаружитель поляризационных аномалий, установленный на космическом носителе, включает бортовой комплекс управления, связанный с центром управления полетом, многолучевую антенну СВЧ-диапазона с линейной поляризацией и каналы приема СВЧ-диапазона для получения регистрограмм измерений, тракт передачи информации на наземные пункты, тракт обработки информации и формирования синтезированной матрицы изображения подстилающей поверхности на средствах ПЭВМ.
Недостатками ближайшего аналога являются:
- неодновременность получения ортогональных по поляризации снимков антенной с линейной поляризацией на восходящем и нисходящем витках, что ведет к неадекватности обрабатываемых изображений и снижает достоверность прогноза;
- для программного включения измерительного комплекса необходимо априорное знание координат очага землетрясения;
- большие массивы информации, подлежащие передаче и обработке, сложность алгоритмов, что приводит к неоправданным затратам ресурсов и уменьшению интервала времени упреждающего прогноза.
Предлагаемое техническое решение позволит обеспечить достоверность и оперативность прогноза по получаемым регистрограммам измерений над очаговой зоной круглосуточно и всепогодно.
Технический результат достигается тем, что в обнаружитель поляризационных аномалий восходящего излучения Земли, установленный на космическом носителе, включающий бортовой комплекс управления связанный с центром управления полетом, каналы приема СВЧ-диапазона, тракт передачи информации на наземные пункты и тракт ее обработки, дополнительно введены две спиральные антенны с вращающейся поляризацией правого и левого направления вращения, каждая из которых подключена к входу одного из параллельных каналов приема, выходы которых нагружены на противоположные плечи дифференциальной мостовой схемы, выход которой связан с входом последовательно подключенных пороговой схемы, аналого-цифрового преобразователя и устройства записи, связанных с бортовым комплексом управления.
Изобретение поясняется чертежами, где:
фиг.1 - функциональная схема обнаружителя;
фиг.2 - изменение поляризации восходящего излучения от действующих напряжений очага;
фиг.3 - схема сканирования диаграммой направленности спиральных антенн участка подстилающей поверхности;
фиг.4 - вид регистрограмм результирующего сигнала над очаговой зоной;
фиг.5 - динамика изменения максимальной амплитуды результирующего сигнала.
Функциональная схема обнаружителя (фиг.1) содержит космический носитель, на внешней стороне которого установлены спиральные антенны 2 и 3, для приема восходящего излучения Земли, в надир, соответственно правого и левого направления вращения поляризаций. Каждая антенна подключена на вход идентичных параллельных каналов приема СВЧ-диапазона 4 и 5, выходы которых нагружены на противоположные плечи дифференциальной мостовой схемы 6. Выход схемы 6 связан с последовательно подключенными пороговой схемой 7, аналого-цифровым преобразователем 8 и устройством записи 9, подключенными к бортовому комплексу управления 10, связанному с Центром управления полетом 11 по радиолинии управления 12. Зарегистрированные обнаружителем массивы информации в сеансах видимости космического носителя 1 с наземных пунктов 13 передаются по радиолинии 12, где записываются на магнитофон 14. После выделения служебных признаков в пункте 13 информация по наземным линиям связи перегоняется в Геофизический центр 15 для тематической обработки.
Динамика взаимодействия элементов обнаружителя состоит в следующем. Под воздействием магнитного поля в земной коре протекают теллурические токи, плотность которых определяется удельным сопротивлением. По направлениям осей сжатия плотность породы больше, а сопротивление меньше. Следовательно, плотность теллурических токов в направлении осей сжатия максимальна. Кроме того, накопление потенциальной энергии механических напряжений в области очага землетрясения сопряжено с протеканием других процессов: образованием трещин, возникновением сколов. В растущих трещинах зоны подготовки землетрясений возникает сильное электростатическое поле, напряженностью 108…109 В/м, сопровождаемое интенсивным протеканием электроразрядных процессов. Возникновение электростатического поля вдоль разломов в земной коре приводит к повороту дипольных молекул воды в приповерхностном слое [см., например, «Предвестники землетрясений и спутниковые средства для их регистрации», Технический отчет, НИИ ЭМ, РАКА, М, 2000 г.].
Совокупный эффект перечисленных неоднородностей земной коры выражается в изменении поляризации собственного излучения подстилающей поверхности над очаговой зоной. Чем больше напряженность электростатического поля, тем большее количество (N) молекул воды участвует в ориентированном излучении, тем поляризационный признак восходящего излучения земной коры выше. Количество молекул (N), участвующих в излучении, определяется глубиной проникновения электромагнитного поля в земную кору. На основании принципа взаимности излучения и приема электромагнитных волн можно утверждать, что чем больше глубина проникновения электромагнитных волн в земную кору, тем большее число ориентированных по возникающему электростатическому полю молекул воды формируют поляризованное излучение подстилающей поверхности. Поэтому зондирование осуществляют в СВЧ-диапазоне.
Зависимость наклона вектора поляризации от возрастающих напряжений очага накануне удара иллюстрируется фиг.2. В отсутствии напряжений в земной коре восходящее излучение не поляризовано, т.е. вектор поля имеет круговую поляризацию. Накануне землетрясения восходящее излучение характеризуется, преимущественно, эллиптической поляризацией, причем чем больше напряжения в земной коре, тем поляризационный эллипс больше вытянут. Случай эллиптической поляризации эквивалентен интерференции двух полей с круговой поляризацией, но с противоположными направлениями вращения и разными амплитудами [см., например, «Антенны с вращающейся поляризацией», учебник/ А.Л.Драбкин, В.Л.Зузенко. Антенно-фидерные устройства. М., «Сов. радио», 1961 г., стр.676-694]. Если принимаемое восходящее излучение не поляризовано, то сигналы в параллельных каналах приема 4, 5 равны по амплитуде, а результирующий сигнал на выходе дифференциальной мостовой схемы 6 равен нулю. Если принимаемое восходящее излучение эллиптически поляризовано, то на выходе схемы 6 появляется результирующий разностный сигнал. При превышении амплитудой результирующего сигнала установленного порога в пороговом элементе 7 включается аналого-цифровой преобразователь 8, преобразующий аналоговый сигнал в дискретную последовательность цифровых отсчетов, запись которой осуществляет устройство 9. При одном проходе измерителя над очаговой зоной получают одну регистрограмму измерений. Обнаружитель работает в двух режимах: сигнальном и функциональном. Сигнальный режим реализуется подачей порогового напряжения на пороговый элемент 7 от БКУ 10. Функциональный режим реализуется регулированием скважности дискретных цифровых отсчетов АЦП 8, управляемого программой выборки измерений от БКУ 10. Выборка измерений считается репрезентативной, если она содержит не менее 600 отсчетов измеряемой величины [см., например, Г.Корн, Т.Корн. Справочник по математике для научных работников и инженеров, М., Наука, 1970 г., глава 19 «Математическая статистика», стр.537-541]. При скорости движения космического носителя ~10 км/с, диаметре зоны подготавливаемого землетрясения >150 км для получения 600 отсчетов измеряемого параметра скважность работы АЦП 8 не должна превышать ≈25 ms. Такое быстродействие обеспечивают интегральные микросхемы типа ЛА-20, совместимые по выходным параметрам с контроллерами IBM PC/AT [см., например, Якубовский Б. и др. Цифровые и аналоговые интегральные микросхемы. Справочник. М., Радио и Связь, 1990 г.].
Таким образом, сканирование подстилающей поверхности вдоль трассы обеспечивается движением космического носителя, а необходимое число дискретных отсчетов в выборке измерений достигается быстродействием АЦП, путем изменения скважности. Схема сканирования подстилающей поверхности диаграммами направленности спиральных антенн иллюстрируется фиг.3. Угол раствора диаграммы направленности спиральной антенны по половинной мощности для азимутальной и меридиональной составляющих задается соотношением [см., например, «Спиральные антенны» в учебнике: А.Л.Драбкин, В.Л.Зузенко. Антенно-фидерные устройства. М., Сов. радио, 1961 г. стр.688-694].
где λ - длина волны принимаемого электромагнитного поля,
L - длина витка спирали антенны,
N - число витков спирали,
D - расстояние между витками.
В декаметровом диапазоне волн, в котором осуществляется зондирование подстилающей поверхности, угол раствора диаграммы направленности спиральных антенн с высоты зондирования ≈350 км должен составлять ≈30°, что реализуется при nd≈1,6λ.
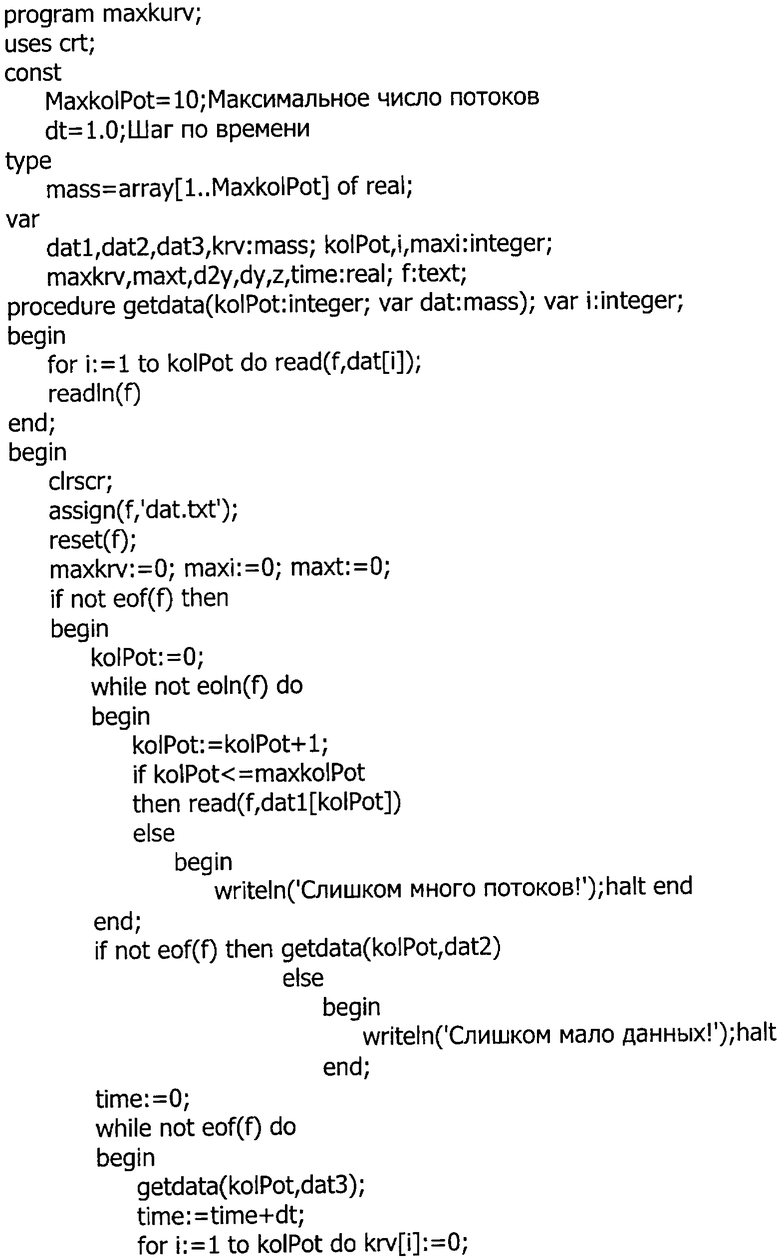
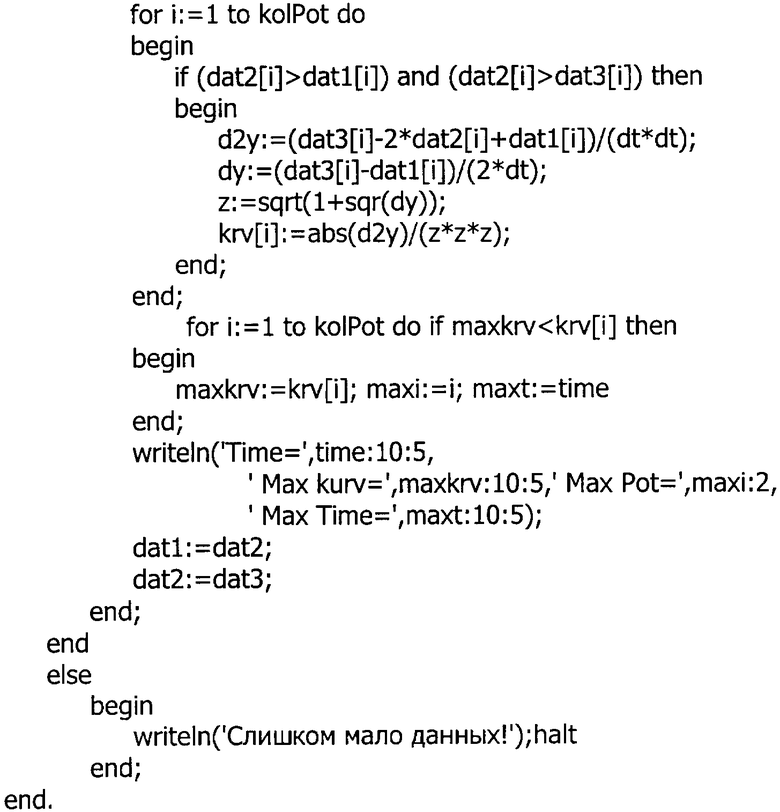
Для точной идентификации очага и определения координат гипоцентра осуществляют обработку регистрограмм. Очевидно, что кривизна регистограмм зависит как от степени поляризации излучения разломной зоны, так и от направления пересечения трассой витка этой зоны. Математической процедурой, характеризующей форму кривых, является вычисление их кривизны (см., например, Н.С.Пискунов «Дифференциальное и интегральное исчисление для ВТУЗов», т.1, 5-е издание, М., Наука, 1964 г., стр.196-198). Кривизна кривой задается функцией:
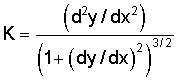
За координаты гипоцентра принимают область наибольшей кривизны, как это иллюстрировано фиг.4. Поскольку в современных системах телеизмерений массивы информации представляют в цифровой форме, а аналитическое выражение регистрограмм отсутствует, определение кривизны регистрограмм осуществляют специализированной математической программой для ПЭВМ.
Чем больше напряжение земной коры очага, тем больше амплитуда результирующего сигнала. Динамика изменения амплитуды результирующего сигнала содержит скрытую информацию о времени и магнитуде ожидаемого удара. Как следует из операций способа ближайшего аналога, переходный динамический процесс представляется экспонентой. График переходного процесса иллюстрируется фиг.5. Из свойств экспоненты следует, что:
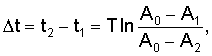
где Δt - интервал времени между двумя последовательными t1, t2 измерениями регистрограмм, A1, А2 - максимальные амплитуды соответствующих регистрограмм,
А0 - продольная амплитуда результирующего сигнала, при которой происходит удар (разрыв земной коры):
По характеристикам переходного процесса прогнозируют параметры удара: ty=4,7T, lg ty[сут]=0,54М-3.37.
Все элементы обнаружителя выполнены по известным типовым схемам. В том числе, дифференциальная мостовая схема [см., например, «Справочник по электронике», том 2/ Под ред. А.А.Куликовского, М., Энергия, 1978 г., стр.484, рис.19-26], пороговая схема [см., например, «Справочник по радиоэлектронным приборам»/ Под ред. А.А.Куликовского, М., Энергия, 1978 г., §4.3. Электронные ключи, стр.339-346].
Эффективность способа, благодаря приему глубинного электромагнитного излучения земной коры в диапазоне СВЧ и точной идентификации координат очага ожидаемого землетрясения по точкам перегиба и радиусу кривизны регистрограмм существенно выше известных аналогов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ПРИЗНАКА-ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2006 |
|
RU2326415C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЗЕМЛЕТРЯСЕНИЙ | 2007 |
|
RU2344447C1 |
| ПОЛЯРИЗАЦИОННЫЙ ИЗМЕРИТЕЛЬ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2008 |
|
RU2439624C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2004 |
|
RU2262125C1 |
| СПОСОБ ДОСТОВЕРНОГО ОБНАРУЖЕНИЯ СЕЙСМИЧЕСКОГО ПРОЦЕССА КОСМИЧЕСКИМИ СРЕДСТВАМИ | 2016 |
|
RU2614183C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОЧАГОВ ЗЕМЛЕТРЯСЕНИЙ | 2000 |
|
RU2181495C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРОЯТНОСТИ ЗЕМЛЕТРЯСЕНИЯ | 2001 |
|
RU2183844C1 |
| ПОЛЯРИЗАЦИОННЫЙ ДАТЧИК ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2006 |
|
RU2343507C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2005 |
|
RU2309438C2 |
| ШЛЕМ КОСМОНАВТА ВИЗУАЛЬНОГО НАБЛЮДЕНИЯ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2009 |
|
RU2410731C1 |
Изобретение относится к геофизике и может быть использовано при создании глобальной системы сейсмического наблюдения Земли космическими средствами. Сущность: установленное на космическом носителе устройство включает бортовой комплекс управления, связанный с центром управления полетом, каналы приема СВЧ-диапазона, тракт передачи информации на наземные пункты и тракт ее обработки. Также в устройство введены две спиральные антенны с вращающейся поляризацией правого и левого направления вращения. Каждая из антенн подключена к входу одного из параллельных каналов приема. Выходы каналов приема нагружены на противоположные плечи дифференциальной мостовой схемы. Выход дифференциальной мостовой схемы связан с входом последовательно подключенных пороговой схемы, аналого-цифрового преобразователя и устройства записи, связанных с бортовым комплексом управления. Технический результат: обеспечение оперативного и достоверного прогноза по получаемым регистрограммам измерений над очаговой зоной круглосуточно и всепогодно. 5 ил.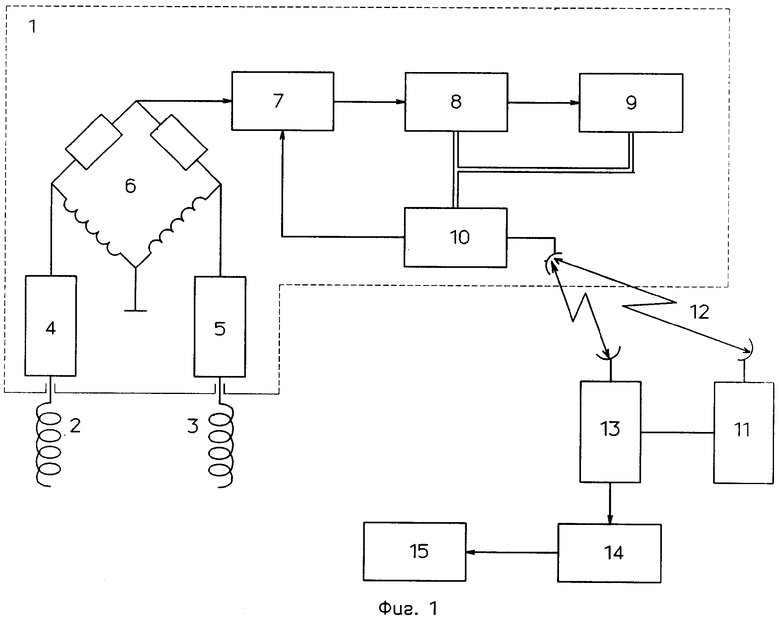
Обнаружитель поляризационных аномалий восходящего излучения Земли, установленный на космическом носителе, включающий бортовой комплекс управления, связанный с центром управления полетом, каналы приема СВЧ-диапазона, тракт передачи информации на наземные пункты и тракт ее обработки, отличающийся тем, что введены две спиральные антенны с вращающейся поляризацией правого и левого направления вращения, каждая из которых подключена к входу одного из параллельных каналов приема, выходы которых нагружены на противоположные плечи дифференциальной мостовой схемы, выход которой связан со входом последовательно подключенных пороговой схемы, аналогово-цифрового преобразователя и устройства записи, связанных с бортовым комплексом управления.
| СПОСОБ ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2004 |
|
RU2262125C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ ЗЕМЛЕТРЯСЕНИЯ | 2003 |
|
RU2254599C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРОЯТНОСТИ ЗЕМЛЕТРЯСЕНИЯ | 2001 |
|
RU2183844C1 |
| JP 2006046938 A, 16.02.2006. | |||

