Изобретение относится к области электротехники и предназначено для использования в приводе инерционных механизмов, например гироскопа, электроверетен, медицинских центрифуг.
Известен способ управления и перевозбуждения синхронного гистерезисного электродвигателя при питании от инвертора напряжения, при котором в синхронном режиме кратковременно отключают режим коммутации ключей инвертора, т.е. отключают электродвигатель от источника переменного напряжения и подключают через инвертор к сети постоянного тока на доли периода рабочей частоты переменного напряжения, осуществляя этим самым намагничивание ротора импульсом постоянного напряжения, а затем восстанавливают режим периодической коммутации ключей инвертора (см. авт. свид. СССР №577632, МПК5 Н02Р 1/30, опубл. 25.10.1977 г.). При такой коммутации достигается режим перевозбуждения синхронного гистерезисного двигателя, повышающий его энергетические характеристики.
Недостаток известного способа состоит в том, что он осуществляет управление электродвигателем только в синхронном режиме и не реализует алгоритмы управления при разгоне и торможении электродвигателя, а также необходимые требования при управлении инерционными механизмами.
Наиболее близким по технической сущности к изобретению является способ управления гистерезисным электроприводом механизма, содержащим синхронный гистерезисный электродвигатель, соединенный с инвертором напряжения, подключенным к сети постоянного тока, заключающийся в форсированном разгоне синхронного гистерезисного электродвигателя в течение заданного интервала времени повышением напряжения на фазах синхронного гистерезисного электродвигателя и его снижении (см. статью Э.М.Ромаш и др. Трехфазный инвертор для питания гистерезисных электродвигателей. Сб. Электронная техника в автоматике, Советское радио, №8, 1976 г., стр.161-164).
Недостатком способа являются отсутствие обеспечения режима торможения, невозможность стабилизировать характеристики синхронного гистерезисного двигателя, сложность реализации из-за применения для регулирования возбуждения вольтодобавок.
Технической задачей изобретения является упрощение способа управления, повышение стабильности характеристик, регулирование функциональных возможностей за счет обеспечения режима динамического торможения.
Это достигается тем, что в известном способе управления гистерезисным электроприводом механизма, содержащим синхронный гистерезисный электродвигатель, соединенный с инвертором напряжения, подключенным к сети постоянного тока, заключающемся в осуществлении в течение заданного времени форсированного разгона электродвигателя путем повышения напряжения на фазах электродвигателя, а затем снижения напряжения, осуществляя режим перевозбуждения, повышение и снижение напряжения в инверторе достигают широтно-импульсным способом регулирования и дополнительно осуществляют режим динамического торможения в заданное время путем перевода инвертора в режим работы регулятора постоянного тока с ограничением тока в пределах заданного коридора путем широтно-импульсной модуляции ключей инвертора, обеспечивающих подключение фаз электродвигателя к сети постоянного тока, питающей инвертор, а по истечении заданного времени торможения отключают электродвигатель от сети постоянного тока путем запирания ключей инвертора. Кроме того, по истечении времени форсированного разгона осуществляют периодическое импульсное намагничивание электродвигателя дополнительной широтно-импульсной модуляцией напряжения в инверторе, кратковременно исключая формируемое напряжение в одной фазе и дополняя или подтверждая его в двух других.
Сущность изобретения поясняется чертежами, где на фиг.1 показана блок-схема устройства для реализации способа управления гистерезисным электроприводом, на фиг.2 приведена временная диаграмма, поясняющая способ управления, на фиг.3 показана диаграмма импульсного намагничивания синхронного гистерезисного двигателя.
Устройство, реализующее способ управления гистерезисным электроприводом, содержит синхронный гистерезисный электродвигатель 1, подключенный к инвертору напряжения 2, силовой третий вход которого соединен с сетью постоянного тока 4. Входы управления инвертора соединены с блоком широтно-импульсной модуляции 5, первый вход которого соединен с задающим генератором 6, второй вход блока широтно-импульсной модуляции 5 подключен к первому выходу задатчика временных интервалов 7, вход которого подключен к блоку задания режимов работы 8. Третий вход блока широтно-импульсной модуляции 5 соединен с блоком дополнительной широтно-импульсной модуляции 9, который первым входом подключен к блоку задатчика временных интервалов 7, входом 2 - к блоку 8, а третьим входом подключен к задающему генератору 6, четвертый вход блока широтно-импульсной модуляции 5 соединен с блоком задания режимов работы 8, а пятый вход - с регулятором тока 10, первый вход которого подключен к второму выходу блока задатчика временных интервалов 7, а второй вход - к датчику тока 11, расположенному в цепи питания 3 инвертора 2.
Устройство, реализующее способ управления гистерезисным электроприводом, работает следующим образом.
На I этапе к фазам синхронного гистерезисного электродвигателя прикладывается повышенное напряжение Uф, вследствие чего осуществляется форсированный разгон синхронного гистерезисного электродвигателя. По мере разгона синхронного гистерезисного электродвигателя ток электродвигателя снижается. По истечении времени форсированного разгона (II этап) напряжение на фазах синхронного гистерезисного электродвигателя снижается до номинального значения Uн. Таким образом осуществляется перевозбуждение синхронного гистерезисного электродвигателя. Ток синхронного гистерезисного электродвигателя снижается до значения Iн. На этом этапе включаются дополнительные подмагничивающие импульсы - исключается формируемое напряжение в одной фазе и подтверждается в двух других. При необходимости остановить синхронный гистерезисный электродвигатель две его фазы подключаются к сети постоянного тока 4. На этом этапе контролируется ток, при превышении током верхнего значения заданного токового коридора фазы синхронного гистерезисного электродвигателя отключаются от сети постоянного тока 4. Далее при достижении током нижнего уровня токового коридора фазы синхронного гистерезисного электродвигателя вновь подключаются к сети постоянного тока. Таким образом, ток в электродвигателе поддерживается в заданном коридоре, что обеспечивает эффективное торможение и не приводит к перегреву синхронного гистерезисного электродвигателя. Среднее напряжение, приложенное к фазам синхронного гистерезисного электродвигателя, равно Uтор. По истечении времени торможения (tтор) фазы синхронного гистерезисного электродвигателя отключаются от сети постоянного тока 4.
При поступлении сигнала оператора блок задания режимов работы 8 формирует на своем выходе сигнал логической единицы, блок задатчика временных интервалов 7 начинает отсчет времени tф, в течение которого поддерживает на своем первом выходе сигнал логической единицы. Блок широтно-импульсной модуляции 5 формирует алгоритм управления инвертором 2 таким образом, чтобы обеспечить питание синхронного гистерезисного электродвигателя 1 напряжением высокой амплитуды, обеспечивая тем самым его форсированный разгон, частота напряжения питания синхронного гистерезисного электродвигателя 1 определяется частотой задающего генератора 6, при наличии сигнала логической единицы на первом входе блока дополнительной широтно-импульсной модуляции 9, который не выдает сигналов в блок широтно-импульсной модуляции 5.
По истечении времени tф блок задатчика временных интервалов 7 снимает с первого выхода сигнал логической единицы. Блок широтно-импульсной модуляции 5 формирует алгоритм работы инвертора 2 таким образом, чтобы напряжение питания синхронного гистерезисного электродвигателя 1 по первой гармонике равнялось номинальному. При этом блок дополнительной широтно-импульсной модуляции 9 начинает выдавать на третий вход блока широтно-импульсной модуляции 5 сигналы, по которым он исключает формируемое напряжение UBC и дополняет или подтверждает импульсы UAB и UCA, осуществляя импульсное намагничивание синхронного гистерезисного электродвигателя 1. Периодические импульсы обеспечивают повышение КПД и стабилизацию энергетических показателей. При возможном развозбуждении синхронного гистерезисного электродвигателя 1 под действием дестабилизирующих факторов, например прерывание питания, для восстановления режима перевозбуждения на прежнем уровне при рабочем уровне напряжения питания необходимо увеличить длительность намагничивающих импульсов в 1,1÷1,3 раза.
При поступлении сигнала оператора блок задания режимов работы 8 формирует на своем выходе сигнал логического нуля, по этому сигналу блок дополнительной широтно-импульсной модуляции 9 перестает выдавать сигналы, блок широтно-импульсной модуляции 5 переходит в режим динамического торможения и управляется блоком регулятора тока 10, блок задатчика временных интервалов 7 в этот момент формирует на своем втором выходе сигнал логической единицы и поддерживает его в течение предварительно заданного времени tТ.
Блок регулятора тока 10 измеряет мгновенное значение тока, протекающего в цепи питания синхронного гистерезисного электродвигателя 3, посредством датчика тока 11 и выдает блоку широтно-импульсной модуляции 5 команды на включение двух (при работе 2-х фаз электродвигателя) или трех (при управлении по 3-м фазам) фаз инвертора, обеспечивая этим подключение синхронного гистерезисного электродвигателя 1 к сети постоянного тока 4 для осуществления динамического торможения, формируя работу этих фаз таким образом, чтобы ток через синхронного гистерезисный электродвигатель 1 не выходил за пределы заданного токового коридора.
Таким образом, данный способ позволяет обеспечить форсированный разгон и торможение синхронного гистерезисного электродвигателя 1 с достижением в рабочем режиме наилучших энергетических показателей с использованием одного инвертора.
Использование изобретения обеспечивает упрощение способа управления гистерезисным электроприводом механизма, повышение стабильности характеристик и регулирование функциональных возможностей за счет обеспечения режима динамического торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2361354C2 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА, СОЗДАНИЯ И АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ РЕЖИМА ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 1971 |
|
SU1840062A1 |
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| Способ пуска двух групп гистерезисных электродвигателей | 1989 |
|
SU1758816A1 |
| Устройство для питания синхронного гистерезисного двигателя с фазовым перевозбуждением | 2017 |
|
RU2661332C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2605088C1 |
| Способ пуска гистерезисного электродвигателя | 1980 |
|
SU997214A1 |
| Устройство для питания синхронного гистерезисного двигателя с амплитудно-фазовым перевозбуждением | 2016 |
|
RU2637111C1 |
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
| Устройство для управления гистерезисным электродвигателем | 1981 |
|
SU974540A1 |
Изобретение относится к области электротехники и может быть использовано в приводе инерционных механизмов, например гироскопа, электроверетен, медицинских центрифуг. Техническим результатом является упрощение, повышение стабильности характеристик, расширение функциональных возможностей за счет обеспечения режима динамического торможения. В способе управления гистерезисным электроприводом механизма на первом этапе к фазам синхронного гистерезисного электродвигателя прикладывается повышенное напряжение Uф, вследствие чего осуществляется форсированный разгон синхронного гистерезисного электродвигателя. По мере разгона ток синхронного гистерезисного электродвигателя снижается. По истечении времени форсированного разгона напряжение на фазах электродвигателя снижается до номинального значения. Затем осуществляется перевозбуждение электродвигателя, и его ток снижается до значения Iн. На этом этапе включаются дополнительные подмагничивающие импульсы. Для остановки синхронного гистерезисного электродвигателя две его фазы подключают к сети постоянного тока, при этом ток поддерживается в заданном коридоре. Все указанные этапы работы гистерезисного синхронного электродвигателя обеспечиваются блоками широтно-импульсного модулирования. 3 ил.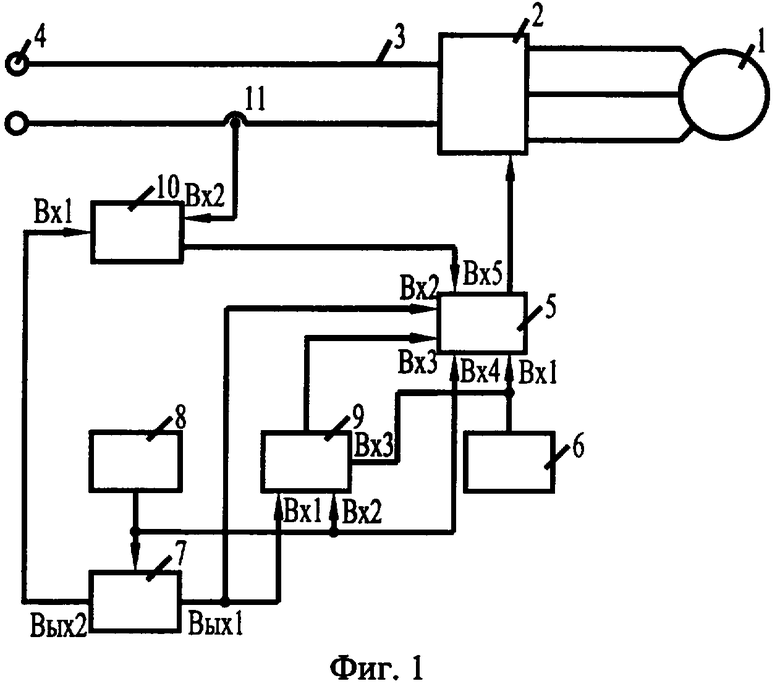
Способ управления гистерезисным электроприводом, содержащим синхронный гистерезисный электродвигатель, подключенный к инвертору напряжения, подключенному к сети постоянного тока, заключающийся в форсированном разгоне в течение заданного интервала времени синхронного гистерезисного электродвигателя повышением напряжения на фазах синхронного гистерезисного электродвигателя с последующим снижением этого напряжения, отличающийся тем, что повышение и снижение напряжения в инверторе осуществляется широтно-импульсным регулированием, а по истечении времени форсированного разгона проводится периодическое импульсное намагничивание электродвигателя дополнительной широтно-импульсной модуляцией напряжения в инверторе, дополнительно осуществляется режим динамического торможения переводом в заданное время инвертора в режим регулятора постоянного тока с ограничением тока на заданном уровне, и синхронный гистерезисный электродвигатель отключается от сети постоянного тока по истечении заданного времени разгона.
| СИСТЕМА ПИТАНИЯ ГИСТЕРЕЗИСТНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2003 |
|
RU2249908C1 |
| Способ частотного запуска (торможения) гистерезисного двигателя | 1975 |
|
SU587583A1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА, СОЗДАНИЯ И АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ РЕЖИМА ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 1971 |
|
SU1840062A1 |
| Устройство для контроля состояния предохранителя | 1987 |
|
SU1527676A1 |
| US 5915070 А, 22.06.1999 | |||
| JP 8033378 А, 02.02.1996 | |||
| Муфта устьевого оборудования | 1976 |
|
SU629319A1 |

