Описание
Настоящее изобретение относится к устройствам управления технологическими процессами. Более конкретно, настоящее изобретение относится к монтируемым в условиях эксплуатации устройствам управления технологическими процессами и выполнения измерений.
Устройства управления технологическими процессами используются для измерения и управления производственными процессами, такими как очистка нефти и нефтепродуктов, обработка пищевых продуктов и ряд других процессов. Устройства для выполнения измерений в технологических процессах включают в себя передатчики данных переменных процессов, которые измеряют переменную процесса, такую как давление или температура, и передают измеренную переменную контроллеру технологического процесса. Другим типом устройства управления процессом является исполнительное устройство, такое как контроллер клапана или тому подобное средство. В общем случае управление процессом выполняется с использованием комбинации передатчиков, исполнительных устройств и контроллера процесса, которые осуществляют информационный обмен в контуре управления технологическим процессом. Оба типа устройств управления процессами взаимодействуют с физическим процессом через элементы сопряжения с процессом. Элементы сопряжения с процессом представляют собой устройства, которые связывают электрические сигналы с условиями физического процесса и включают в себя такие устройства, как датчики, концевые выключатели, контроллеры клапанов, нагреватели, контроллеры двигателей и ряд других устройств.
Контроллер процесса в типовом случае представляет собой микрокомпьютер, размещенный в диспетчерском пункте, удаленно от производственного процесса. Контроллер может принимать информацию процесса от устройств измерения процесса и подавать соответствующий управляющий сигнал на одно или более устройств управления процессом для воздействия на процесс и тем самым для управления процессом.
Для взаимодействия с процессом передатчики и исполнительные устройства, в общем случае, монтируются вблизи процесса в условиях эксплуатации. Такая физическая близость может поставить перед устройствами управления процессом целый ряд проблем, вызванных окружающей средой. Например, устройства управления процессом часто подвергаются воздействию экстремальных температур, вибрации, коррозионной и/или воспламеняющейся среды и электрических шумов. Для противодействия таким условиям устройства управления технологическими процессами проектируются специально с расчетом на монтаж в условиях эксплуатации. Такие монтируемые в условиях эксплуатации устройства используют надежные корпуса, которые могут проектироваться как взрывобезопасные. Кроме того, монтируемые в условиях эксплуатации устройства управления технологическими процессами могут также проектироваться с использованием схем, которые определяются как «внутренне надежные», что означает, что даже при условиях отказа схемы в общем случае не будут содержать достаточно много электрической энергии для генерации искрового разряда. Кроме того, методы электрической изоляции обычно используются для снижения влияния электрических шумов. Имеется ряд факторов проектирования, которые отличают устройства управления технологическими процессами, монтируемые в условиях эксплуатации, от других устройств, которые измеряют характеристики датчиков и обеспечивают данные, указывающие на такие характеристики.
Помимо факторов окружающей среды, перечисленных выше, другой проблемой для устройств, монтируемых в условиях эксплуатации, является проблема электрического монтажа. Поскольку устройства управления технологическими процессами находятся вблизи процесса, на удалении от диспетчерского пункта, часто требуются длинные проводные линии для обеспечения связи таких устройств с диспетчерским пунктом. Такие длинные проводные линии являются дорогостоящими в установке и создают затруднения при техническом обслуживании.
Возможным путем сокращения требуемой проводки является применение двухпроводных устройств управления технологическими процессами. Эти устройства связываются с диспетчерским пунктом с использованием двухпроводного контура управления процессом. Двухпроводные устройства управления процессом получают энергопитание из контура управления процессом и осуществляют информационный обмен посредством контура управления процессом таким способом, который не зависит от обеспечения энергопитания для устройства управления технологическим процессом. Методы осуществления передач по двухпроводной линии включают в себя сигнализацию с использованием тока 4-20 мА, протокол HART® (Магистрально адресуемый дистанционный преобразователь), шину FOUNDATIONТМ Fieldbus и другие методы. Хотя двухпроводная система управления процессом позволяет упростить проводной монтаж, такие системы обеспечивают ограниченную электрическую мощность питания для подключенных устройств. Например, устройство, которое осуществляет передачи в соответствии с 4-20 мА сигнализацией, должно потреблять ток не более 4 мА, в противном случае потребление тока устройством будет влиять на переменную процесса. Ограниченный бюджет по мощности питания двухпроводных устройств управления процессом традиционно ограничивал функциональные возможности, которые могли бы быть обеспечены.
Хотя разработка полевых (эксплуатационных) устройств, которые осуществляют связь в цифровой форме в коммуникационном контуре процесса, знаменовала собой значительный прогресс в области измерений и управления промышленными процессами, однако, все еще остаются значительные трудности. Более конкретно, многие установки устройств управления процессом, монтируемые в условиях эксплуатации, включают в себя десятки, если только не сотни, различных устройств управления процессом, связанных с процессом в различных местоположениях и взаимодействующих с процессом под управлением одного или более контроллеров.
В недавнем прошлом все полевые устройства представляли собой основанные на аналоговой технике полевые устройства. Таким образом, с одной стороны, промышленные отрасли управления технологическими процессами вкладывали и до сих пор вкладывают значительные капиталовложения в широкий спектр основанных на аналоговой технике полевых устройств. Даже с приходом значительно усовершенствованных цифровых устройств, осуществляющих связь в соответствии с протоколом коммуникации для технологических процессов с использованием шины FOUNDATIONТМ Fieldbus, владельцы аналоговых установок испытывают сомнения в целесообразности простого принятия новой технологии ввиду времени и капиталовложений, связанных с переходом такой установки полностью на новую технологию.
В технике существует настоятельная потребность в обеспечении устройства или системы, которая облегчает реализацию цифровой технологии управления технологическим процессом и измерений, не требуя от владельца такой установки полностью адаптировать его систему к новой технологии.
Сущность изобретения
Варианты осуществления настоящего изобретения в принципе обеспечивают монтируемое в условиях эксплуатации устройство управления технологическим процессом, которое получает цифровую информацию от одного или более устройств управления процессом и обеспечивает связанный с этим аналоговый выходной сигнал. Варианты осуществления настоящего изобретения предусматривают обеспечение беспроводного интерфейса с монтируемым в условиях эксплуатации устройством управления технологическим процессом, так что информация конфигурации и/или диагностики может передаваться между монтируемым в условиях эксплуатации устройством управления технологическим процессом и одним или более дополнительными устройствами. В некоторых вариантах осуществления монтируемое в условиях эксплуатации устройство управления технологическим процессом может полностью получать энергопитание посредством цифрового коммуникационного контура процесса, с которым оно связано. Наконец, варианты осуществления настоящего изобретения также предусматривают генерацию и сохранение в монтируемом в условиях эксплуатации устройстве управления технологическим процессом отображения между одним или более полевых устройств, осуществляющих связь в соответствии с протоколом цифровой коммуникации для технологического процесса, и аналоговым выходным сигналом монтируемого в условиях эксплуатации устройства управления технологическим процессом.
Краткое описание чертежей
Фиг. 1 - схематичное представление системы управления технологическим процессом, использующей двухпроводное монтируемое в условиях эксплуатации устройство управления технологическим процессом согласно варианту осуществления настоящего изобретения.
Фиг. 2 - блок-схема монтируемого в условиях эксплуатации устройства управления технологическим процессом, показанного на фиг. 1.
Фиг. 3 - блок-схема способа обеспечения переменной процесса с использованием монтируемого в условиях эксплуатации устройства управления технологическим процессом согласно варианту осуществления настоящего изобретения.
Фиг. 4 - блок-схема способа работы монтируемого в условиях эксплуатации устройства управления технологическим процессом согласно варианту осуществления настоящего изобретения.
Фиг. 5 - блок-схема монтируемого в условиях эксплуатации устройства управления технологическим процессом согласно варианту осуществления настоящего изобретения.
Фиг. 6 - блок-схема монтируемого в условиях эксплуатации устройства управления технологическим процессом работающего с множеством цифровых устройств обработки и распределенной системой управления (DCS).
Фиг. 7 - схематичное представление приведенного для примера отображения согласно варианту осуществления настоящего изобретения.
Фиг. 8 - схематичное представление трех монтируемых в условиях эксплуатации устройств управления технологическим процессом согласно варианту осуществления настоящего изобретения, используемых для мультиплексирования и демультиплексирования ряда результатов измерений датчиков в аналоговый выходной сигнал тока 4-20 мА системы DCS.
Детальное описание предпочтительных вариантов осуществления
На фиг. 1 показано монтируемое в условиях эксплуатации устройство 16 управления технологическим процессом, которое может быть адаптировано для выполнения сложных генерируемых пользователем алгоритмов управления, во многом подобных тем, которые используются с традиционными контроллерами программируемой логики. Варианты осуществления могут включать в себя входные каналы, выходные каналы и любую их комбинацию. В общем случае, каждый канал изолирован от остальной части устройства управления технологическим процессом. Такая изоляция позволяет устранить ошибки контура заземления, которые в настоящее время ограничивают применение передатчиков с множеством входов. Наконец, распределение питающей мощности таково, что в вариантах осуществления настоящего изобретения питание осуществляется полностью посредством двухпроводного контура 14 управления процессом. Эти и другие признаки поясняются со ссылками на чертежи в относящемся к ним нижеследующем описании.
На фиг. 1 схематично представлена система 10 управления технологическим процессом, которая включает в себя диспетчерский пункт 12, контур 14 управления технологическим процессом и устройство 16 управления технологическим процессом. Система управления технологическим процессом может содержать одно устройство управления технологическим процессом, связанное с диспетчерским пунктом 12, однако система 10 управления технологическим процессом также может включать в себя сотни устройств управления технологическими процессами, связанные с одним или более диспетчерскими пунктами посредством ряда контуров управления технологическими процессами.
Диспетчерский пункт 12 в типовом случае представляет собой оборудование, расположенное отдельно от устройства 16, содержащее микрокомпьютер. Пользователь, находящийся в диспетчерском пункте 12, использует микрокомпьютер для взаимодействия с различными устройствами управления технологическими процессами через контур 14 управления технологическими процессами и тем самым управляет технологическим(и) процессом(ами) из диспетчерского пункта 12. Для наглядности диспетчерский пункт 12 показан как отдельный блок. Однако в некоторых вариантах осуществления системы управления диспетчерский пункт 12 может в действительности связывать контур 14 управления технологическими процессами с глобальной компьютерной сетью, такой как Интернет, так что пользователи повсеместно могут получать доступ к устройству управления технологическим процессом посредством традиционного программного обеспечения браузера.
Контур 14 представляет собой двухпроводной контур управления технологическими процессами. Существует ряд протоколов двухпроводной связи для управления технологическими процессами для осуществления коммуникаций посредством контура 14, причем может использоваться любой подходящий протокол. Например, с вариантами осуществления настоящего изобретения могут использоваться протокол HART®, протокол шины FOUNDATIONТМ Fieldbus и протокол Profibus-PA. Контур 14 обеспечивает энергопитание для подсоединенных устройств управления технологическими процессами при обеспечении информационного обмена между различными устройствами.
Устройство 16 управления технологическим процессом содержит крышку 17 и основание 19, которые предпочтительно выполнены из подходящего пластика. Основание 19 выполнено с учетом сопряжения с направляющими для монтажа, соответствующими промышленному стандарту DIN. Как описано ниже более детально, устройство 16 управления технологическим процессом предназначено для работы только от электрической мощности питания, получаемой через контур 14, и адаптировано для монтажа в условиях эксплуатации. Так, устройство 16 выполнено с возможностью работы в относительно большом температурном диапазоне (таком как от -40 до 85 градусов Цельсия), при механических вибрациях и влажности, превышающей 90%. Такая устойчивость по отношению к условиям окружающей среды обеспечивается, в первую очередь, выбором надежных компонентов, как описано ниже. Дополнительно предусматриваемый кожух 18 (показан пунктиром) обеспечивает дополнительную прочность и может представлять собой любой известный кожух, такой как кожух стандарта NEMA (Национальная ассоциация изготовителей электронного оборудования) или взрывобезопасный кожух. Вариант осуществления устройства управления технологическим процессом, показанный на фиг. 1, имеет ряд входов и выходов и включает в себя подходящие вычислительные схемы (показанные на фиг. 2) для исполнения генерируемого пользователем алгоритма управления. Алгоритм состоит из набора логических операторов, связывающих конкретные события входов с выходами, управляемыми устройством 16. Пользователь может изменить алгоритм либо путем взаимодействия с устройством 16 локальным образом, либо путем информационного обмена с устройством 16 через контур 14 управления. Алгоритм может генерироваться с использованием обычного программного обеспечения генерации логики, такого как Relay Ladder Logic и Sequential Function Charts (SFC's). В этом смысле устройство 16 может рассматриваться как двухпроводный монтируемый в условиях эксплуатации контроллер программируемой логики. Хотя описание фокусируется на варианте осуществления, показанном на фиг. 1 и 2, такое описание приведено для ясности, поскольку варианты осуществления, использующие только входы или выходы, явным образом подразумеваются. Традиционно, устройства с вычислительной мощностью устройства 16 не могли бы эксплуатироваться на основе двухпроводных контуров управления технологическими процессами ввиду принципиальных ограничений по мощности.
Устройство 16 управления технологическими процессами связано с датчиками 20, 22, 24, 26, 28 и 30, а также с исполнительными устройствами 32 и 34. Датчики 20, 22 и 24 являются термопарами известного типа, которые связаны с различными точками процесса, для обеспечения сигналов напряжений, основанных на переменных процесса в соответствующих точках процесса. Устройства 26, 28, 30 на терморезисторах (RTD) также связаны с различными точками процесса и обеспечивают сопротивление, которое основано на температуре процесса в соответствующих точках. RTD 26 связан с устройством 16 через известное трехпроводное соединение и иллюстрирует то, что различные конфигурации проводного монтажа могут использоваться в вариантах осуществления настоящего изобретения. Исполнительные устройства 32 и 34 связаны с устройством 16 управления технологическим процессом и приводят в действие соответствующие клапаны, переключатели и тому подобные средства на основе сигналов управления с устройства 16. Как отмечено выше, устройство 16 может исполнять генерируемый пользователем алгоритм управления для связывания конкретных входных условий с конкретными выходными командами. Например, устройство 16 может воспринимать температуру флюида в технологическом процессе и вызывать срабатывание исполнительного устройства 32 для управления нагревателем, связанным с флюидом технологического процесса, чтобы поддерживать температуру флюида на выбранном уровне.
На фиг. 2 показана блок-схема устройства 16, представленного на фиг. 1. Устройство 16 содержит коммуникатор 36 контура, модуль 38 питания, контроллер 40 и каналы 42, 44, 46, 48 и память 52. Коммуникатор 36 контура связан с контуром 14 управления процессом и адаптирован для двунаправленной передачи данных по контуру. Коммуникатор 36 контура может включать в себя известное коммуникационное устройство, такое как традиционный коммуникационный контролер FOUNDATIONTM Fieldbus или иное подобное средство. Дополнительно, коммуникатор 36 может содержать соответствующие схемы развязки для облегчения соответствия действительным условиям надежности, как изложено в Factory Mutual Approval Standard (Стандарт взаимного принятия промышленностью), озаглавленном “Intrinsically Safe Apparatus and Associated Apparatus for Use in Class I, II and III, Division 1 Hazardous (Classified) Locations”, Class Number 3610, published October 1998.
Модуль 38 питания связан с контуром 14, так что модуль 38 питания обеспечивает питание всех компонентов устройства 16 на основе мощности, полученной из контура 14. Хотя модуль 38 питания имеет единственную стрелку 50, указывающую, что модуль 38 питания обеспечивает питание всех компонентов, следует отметить, что такая мощность может быть обеспечена при множестве напряжений. Например, модуль 38 питания предпочтительно включает в себя коммутируемый источник питания, который обеспечивает электрическую мощность для множества напряжений. Таким образом, несколько компонентов, такие как АЦП и элементы развязки, могут получать более высокое напряжение, такое как 4,9 В, в то время как маломощные компоненты, такие как контроллер 40, память 52 и коммуникатор 36 контура, получают низкое напряжение, такое как 3,0 В. Кроме того, модуль 38 питания предпочтительно программируется до такой степени, что, по меньшей мере, одно из обеспечиваемых напряжений может быть переменным на этой основе. Свойства селективности модуля 38 питания облегчают распределение мощности, как описано ниже.
Контроллер 40 связан с памятью 52 и исполняет программные инструкции, сохраненные в ней. Память 52 предпочтительно является памятью с низкой мощностью питания, работающей при напряжении 3,0 В, например, модели LRS 1331, коммерчески доступной от Sharp Electronics. Дополнительно, память 52 может быть «стековой» памятью, в которой в одном модуле памяти предусмотрены как флэш-память, так и энергозависимая память. Генерируемый пользователем алгоритм или «программа», исполняемая контроллером 40, может изменяться пользователем либо путем взаимодействия с устройством 16 локальным образом, либо путем доступа к устройству 16 через контур 14. В некоторых вариантах осуществления программа включает в себя инструкции, которые связывают вводы событий процесса с выводами, определяемыми контроллером 40. В этом смысле устройство 16 функционирует подобно контроллеру программируемой логики, который представляет собой устройство, которое в типовом случае не является ни достаточно надежным для монтажа в условиях эксплуатации, ни способным работать при низких уровнях питающей мощности, свойственных для двухпроводных полевых устройств. Однако путем такого обеспечения функций контроллера программируемой логики намного более сложные алгоритмы управления процессами могут быть реализованы на основе дружественного к пользователю интерфейса, такого как Relay Ladder Logic (логика релейных цепей) и тому подобные средства.
Контроллер 40 получает питание от модуля 38 и осуществляет информационный обмен с коммуникатором 36 контура. Контроллер 40 предпочтительно включает в себя микропроцессор с низкой питающей мощностью, например, модели ММС 2075, коммерчески доступный от компании Motorola Inc (Schaumburg, IL). Кроме того, контроллер 40 предпочтительно имеет селектируемую внутреннюю тактовую частоту, так что тактовая частота контроллера 40 и, следовательно, скорость вычислений и потребление мощности могут выбираться посредством соответствующих команд, посылаемых на устройство 16 по контуру 14. Поскольку более высокие тактовые скорости обусловят потребление контроллером 40 большей мощности, выбор тактовой частоты контроллера 40 и выбор уровня напряжения, выдаваемого модулем 38 питания на контроллер 40, предпочтительно выполняются взаимосвязанным образом. Таким способом скорость обработки и потребление мощности для устройства 16 выбираются и изменяются совместно.
Контроллер 40 связан с различными каналами через интерфейсную шину 54, которая предпочтительно является последовательной шиной, спроектированной в расчете на высокоскоростную передачу данных, например, такой как синхронный периферийный интерфейс (SPI). Каналы 42, 44, 46 и 48 связаны с шиной 54 через элементы 56, 58, 60, 62 развязки при передаче соответственно, которые предпочтительно представляют собой оптоэлектронные элементы развязки, но также могут являться любыми подходящими устройствами развязки, такими как конденсаторы. В некоторых вариантах осуществления каналы 42, 44, 46 и 48 обеспечивают данные в параллельной форме, и параллельно-последовательные преобразователи 64 используются для преобразования данных между последовательной и параллельной формой. Предпочтительно в качестве преобразователей 64 используются универсальные асинхронные приемники/передатчики (UART).
Канал 42 связан с контроллером 40 и включает в себя выводы 1-n датчиков, мультиплексор (MUX) 66, аналого-цифровой преобразователь (АЦП) 68, элемент 56 развязки для передачи и элемент 70 развязки по питанию. Понятно, что элемент 56 развязки для передачи и элемент 70 развязки по питанию могут быть объединены в единую схему. Канал 42 конкретным образом адаптирован для измерения, реализуемого датчиком конкретного типа, таким как термопары, терморезисторы, тензодатчики, датчики давления или датчики других типов. Каждый вывод датчика предназначен для связи одного датчика, например термопары, с мультиплексором 66. Мультиплексор 66 селективным образом связывает один из датчиков с АЦП 68, так что характеристика датчика (напряжение для термопары) измеряется и передается на контроллер 40 через элемент 56 развязки и блок UART 64. Питание для канала 42 получается из модуля 38 питания через элемент 70 развязки по питанию. Элемент 70 развязки по питанию предпочтительно представляет собой трансформатор, но может являться любым подходящим устройством. Специалистам в данной области техники должно быть понятно, что элемент 56 развязки для передачи и элемент 70 развязки по питанию взаимодействуют для обеспечения развязки канала 42 относительно остальной части устройства 16.
Канал 44 аналогичен каналу 42, и идентичные компоненты обозначены теми же ссылочными позициями. Предпочтительно, канал 44 конфигурирован для измерения, реализуемого датчиками другого типа, отличающимися от датчиков канала 42. Например, в одном варианте осуществления канал 42 выполняется для измерения напряжения термопар, а канал 44 выполняется для измерения сопротивления терморезисторов. Каждый вывод датчика в канале 44 выполнен для обеспечения связи с терморезистором посредством двух-, трех- или четырехпроводного соединения (Кельвина). Поскольку каждый из каналов 42 и 44 электрически изолирован от остальной части устройства 16, связь первого независимо заземленного датчика с каналом 42 и второго независимо заземленного датчика с каналом 44 не приводит к генерации нежелательных ошибок заземления в контуре. Дополнительно, поскольку каждый канал спроектирован на конкретный тип датчика, параметры, такие как точность аналого-цифрового преобразования и скорость преобразования, могут согласовываться с конкретным типом датчика. Например, канал, спроектированный в расчете на высокую точность, может использовать АЦП, конфигурированный для обеспечения очень высокой точности, но имеющий относительно длительное время преобразования. И наоборот, канал, спроектированный для датчиков, которые измеряют переменную процесса, которая изменяется очень быстро, могут использовать менее точный высокоскоростной АЦП. По существу, любой датчик может переключаться с режима работы с датчиками резистивного типа на режим работы с датчиками типа измерителей напряжения на основе информации конфигурирования, полученной от контроллера 40. Контроллер 40 может обеспечить информацию конфигурирования на основе информации, принятой по контуру 14, или посредством локального ввода (не показано). Дополнительно, контроллер 40 может выдать информацию конфигурирования в каналы для настройки частоты дискретизации аналого-цифрового преобразования для каждого канала или даже для каждого датчика. Это особенно предпочтительно, если частоты смены датчика являются ожидаемыми на основе знания информации о технологическом процессе.
Канал 46 аналогичен каналам 42 и 44, однако поскольку канал 46 конфигурирован для приема цифровых вводов, он не содержит АЦП. Как показано, входы 1-n связаны с мультиплексором 66, который переносит сигналы с выбранного входа в шину 54 через элемент 60 развязки для передачи и блок UART 64. В некоторых вариантах осуществления уровень ввода может быть таким, что цифровые вводы могут непосредственно подаваться в блок UART 64 через элемент 60 развязки. Цифровые вводы обычно указывают на сигналы логического типа, такие как сигналы замыкания контактов в концевых выключателях и тому подобных средствах. Однако цифровые входные сигналы 1-n также могут связываться с цифровыми выходными сигналами других устройств управления технологическими процессами, так что входные сигналы представляют логические сигналы, такие как сигналы тревоги или другие сигналы типа булевой логики.
Канал 48 аналогичен каналу 46, но, по существу, работает реверсивно по отношению к каналу 46. Таким образом, последовательная информация, посылаемая в канал 48 через блок UART, преобразуется в параллельную форму и посылается через элемент 62 развязки для передачи для индивидуальной установки выходных сигналов исполнительных устройств. Таким образом, логические сигналы передаются на терминалы, обозначенные как «исполнительное устройство 1-n», для обеспечения срабатывания исполнительных устройств, связанных с этими терминалами (не показано), для включения или выключения, по мере необходимости. Такие исполнительные устройства могут представлять собой любые подходящие устройства, такие как контроллеры клапанов, нагреватели, контроллеры двигателей и любое другое подходящее устройство. По существу, любое устройство, которое является адресуемым на основе выходного сигнала логического типа, может представлять собой исполнительное устройство.
На фиг. 3 показана блок-схема способа обеспечения переменной процесса с использованием монтируемого в условиях эксплуатации устройства управления технологическим процессом в соответствии с вариантом осуществления настоящего изобретения. Способ начинается на этапе 80, на котором монтируемое в условиях эксплуатации устройство управления технологическим процессом полностью получает электропитание посредством двухпроводного контура управления процессом. На этапе 82 устройство управления технологическим процессом связывается с первым датчиком через первый изолированный входной канал. Сигнал датчика принимается через первый изолированный входной канал, причем этот сигнал указывает на переменную процесса. На этапе 84 устройство управления технологическим процессом связывается со вторым датчиком через второй изолированный входной канал, чтобы получить сигнал второго датчика. Поскольку первый и второй входные каналы изолированы, то независимое заземление первого и второго датчиков не вызовет нежелательных ошибок заземления в контуре. На этапе 86 устройство управления технологическим процессом вычисляет переменную процесса на основе одного или обоих сигналов датчиков. Кроме того, хотя способ описан по отношению к двум датчикам, ряд дополнительных датчиков может быть использован, так что переменная процесса будет функцией любого числа сигналов датчиков. Например, устройство управления технологическим процессом может усреднять значения с датчиков, получать их разность, стандартное отклонение или любую другую подходящую функцию. На этапе 88 вычисленная переменная процесса выдается на выход. Такой выходной сигнал может иметь форму информации, посылаемой по контуру управления процессом, локальным выводом на дисплей или локальным выводом, осуществленным через выходной канал.
На фиг. 4 показана блок-схема способа работы монтируемого в условиях эксплуатации устройства управления технологическим процессом в соответствии с вариантом осуществления настоящего изобретения. На этапе 80 устройство полностью получает электропитание посредством двухпроводного контура управления процессом. На этапе 92 устройство получает входной сигнал. Такой входной сигнал может иметь форму сигналов, получаемых через входные каналы, такие как множество изолированных входных каналов, описанных выше, в форме информации процесса, полученной через двухпроводный контур управления процессом, в форме локального ввода или любой комбинации входных сигналов и информации. На этапе 94 устройство исполняет программируемую пользователем логику для связывания входной информации с одним или более выходных сигналов процесса. Программируемая пользователем логика может представлять собой простые или сложные алгоритмы, такие как цепочечная логика, SFC, нечеткая логика, адаптивное управление или нейронные сети и т.п. На этапе 96 устройство обеспечивает выходной сигнал, определенный посредством выполнения операции программируемой пользователем логики. Выходной сигнал может представлять собой локальный выходной сигнал, цифровой или аналоговый, или выходной сигнал может посылаться в виде информации по двухпроводному контуру управления процессом.
На фиг. 5 показана блок-схема монтируемого в условиях эксплуатации устройства управления технологическим процессом в соответствии с вариантом осуществления настоящего изобретения. Монтируемое в условиях эксплуатации устройство 116 управления технологическим процессом во многом сходно с устройством 16, и сходные компоненты обозначены подобными ссылочными позициями. Основное различие между устройством 116 и устройством 16 заключается в том, что устройство 116 конфигурировано таким образом, что имеет ряд аналоговых выходов 118, на которых формируется аналоговый выходной сигнал на основе сигнала управления, полученного от контроллера 40. Каждый из каналов или модулей 142, 144, 146 и 148 предпочтительно изолирован от остальной части устройства 116. Одним из возможных типов аналогового сигнала, который весьма полезен, является генерируемый сигнал или сигнал управления в виде тока в пределах 4-20 мА. Это связано с тем, что многие прежние устройства управления технологическими процессами и системы управления передают переменную процесса как значение тока в пределах от 4 до 20 мА.
Модуль 142 содержит четыре аналоговых выхода 118, которые связаны с ЦАП 130 через мультиплексор 66. ЦАП 130 может представлять собой любое устройство, которое получает цифровой сигнал с контроллера 40 и в ответ генерирует аналоговый выходной сигнал, связанный с цифровым входным сигналом. Мультиплексор 66 осуществляет связь с контроллером 40 и селективным образом подает один или более выбранных аналоговых выходных сигналов на ЦАП 130.
Модуль 144 сходен с аналоговыми входными модулями, описанными выше. Однако каждый из аналоговых входов 119 выполнен таким образом, чтобы принимать ток, текущий через него. Мультиплексор 66 связывает АЦП 68 с одним или более входов 119, как это выбрано контроллером. АЦП 68 обеспечивает индикацию для контроллера 40, относящуюся к току, протекающему через выбранный вход 119. Использование аналоговых входов на ток 4-20 мА позволяет устройству 116 принимать аналоговые сигналы управления или обрабатывать информацию о переменных и адаптировать или иным образом модифицировать свою работу на основе принятого аналогового входного сигнала. Таким способом устройство 116 может получать аналоговую информацию, например, точку настройки, с аналоговой распределенной системы управления (DCS). Альтернативно, такая информация могла бы также передаваться в устройство 116 через модуль 120 беспроводной связи, что описано более подробно ниже. Это также позволяет использовать систему DCS для передачи сигналов на конечные управляющие элементы, причем такие сигналы являются либо аналоговыми, либо радиочастотными цифровыми сигналами.
Модуль 148 сходен с аналоговыми выходными модулями 142 и 148 с одним важным различием. Модуль 148 содержит коммуникационную микросхему 150 протокола HART (Магистрально адресуемый дистанционный преобразователь). Протокол HART является гибридным протоколом, в котором цифровой сигнал наложен на аналоговый сигнал, такой как сигнал тока 4-20 мА. Протокол HART является известным протоколом связи промышленного стандарта, используемым при управлении технологическими процессами. Каждый из аналоговых выходов 152 может быть связан с устройством протокола HART. Хотя на фиг. 5 иллюстрируется монтируемое в условиях эксплуатации устройство управления технологическим процессом, имеющее 2 аналоговых выходных модуля, аналоговый входной модуль и модуль протокола HART, другие комбинации также могут быть использованы в соответствии с вариантами осуществления настоящего изобретения.
Устройство 116 также предпочтительным образом включает в себя модуль 120 беспроводной связи, который передает и/или принимает беспроводные данные через антенну 122. Модуль 120 беспроводной связи связан с контроллером 40 и взаимодействует с внешними беспроводными устройствами через антенну 122 на основе команд и/или данных с контроллера 40. Модуль 120 беспроводной связи может передавать информацию, относящуюся к процессу, а также информацию, относящуюся к устройству. В зависимости от применения модуль 120 беспроводной связи может быть адаптирован для осуществления связи в соответствии с любым подходящим протоколом беспроводной связи, включая, без ограничения указанным, технологии беспроводного сетевого взаимодействия (например, пункты доступа к беспроводной связи стандарта IEEE 802.11b и устройства беспроводного сетевого взаимодействия, выпускаемые компанией Linksys (Irvine, California)), технологии сотовых или цифровых сетей (Microburst® компании Aeris Communication Inc. (San Jose, California), сверхширокополосные системы, оптические системы свободного пространства, GPS (Глобальная система мобильной связи), GPRS (Общий сервис пакетной радиосвязи), CDMA (Множественный доступ с кодовым разделением каналов), технология расширенного спектра, методы инфракрасной связи, SMS (Служба передачи коротких сообщений/текстов) и любые другие подходящие технологии беспроводной связи. Кроме того, могут использоваться известные методы решения проблемы конфликтов при передаче данных, так что множество блоков могут сосуществовать в пределах дальности действия беспроводной связи каждого из них. Такое предотвращение конфликтов может включать в себя использование ряда различных радиочастотных каналов и/или методов расширения спектра.
Модуль 120 беспроводной связи может также содержать приемопередатчики для реализации множества методов беспроводной связи. Например, основная беспроводная связь может выполняться с использованием методов связи на относительно большие расстояния, таких как GSM или GPRS, в то время как вторичный или дополнительный метод связи может быть предусмотрен для обслуживающего персонала или операторов, находящихся вблизи блока, с использованием, например, протоколов IEEE 802.11b или Bluetooth.
Некоторые модули беспроводной связи могут включать в себя схемы, которые взаимодействуют с системой GPS (Система глобального позиционирования). Система GPS может предпочтительным образом использоваться в устройстве 116 для мобильных устройств, обеспечивая нахождение индивидуального устройства 116 в удаленном местоположении. Однако определение местоположения также может основываться на использовании других методов.
Для передачи информации о процессе от цифрового устройства управления технологическим процессом на аналоговое устройство управления технологическим процессом (так, например, как через контур тока 4-20 мА) устройство 116 сохраняет в памяти 52 или другой подходящей памяти отображение между одним или более устройствами управления технологическими процессами, связанными с коммуникатором 36 контура через относящийся к процессу коммуникационный контур промышленного стандарта или через модуль 120 беспроводной связи. Например, отображение может включать в себя запись, которая указывает, что выходной сигнал, соответствующий температуре флюида в процессе, выданный передатчиком температуры шины FOUNDATIONTM Fieldbus, связанным с коммуникатором 36 контура, должен направляться на конкретные аналоговые выходы 124 и 128. Кроме того, отображение может включать в себя дополнительные жестко кодированные или определенные пользователем операции, которые устройство 116 выполняет после приема информации о температуре из шины Fieldbus, перед настройкой аналогового выходного сигнала. Например, усиление и/или размах могут устанавливаться или изменяться программируемым способом путем взаимодействия с устройством 116 посредством коммуникатора 36 или модуля 120 беспроводной связи.
Отображение предпочтительно создается пользователем или обслуживающим персоналом, осведомленным о любых подключенных устройствах (посредством коммуникатора 36 или модуля 120 беспроводной связи). Получение этих сведений не составляет проблем и может быть обеспечено обслуживающему персоналу локально на месте расположения устройства 116 или путем автоматического обнаружения. В одном варианте осуществления пользователь устройства 116 будет взаимодействовать с устройством 116 посредством модуля 120 беспроводной связи с использованием любого подходящего метода беспроводной связи. Кроме того, устройство 116 может представить свою информацию о конфигурации и/или диагностическую информацию пользователю посредством модуля 120 беспроводной связи в любом подходящем формате. Один конкретный формат соответствует HTML, при этом устройство 116 по существу обеспечивает веб-интерфейс для обслуживающего персонала.
После того как обслуживающий персонал осуществил взаимодействие с устройством 116 и получил сведения о подключенных устройствах, устройство предпочтительным образом генерирует отображение между информацией о переменной процесса с конкретного цифрового устройства управления технологическим процессом (например, с выхода AI передатчика шины FOUNDATIONTM Fieldbus) и конкретным аналоговым выходом устройства 116. В одном варианте осуществления устройство 116 может сохранять отображение, относящееся к 8 цифровым устройствам управления процессом, на 8 отдельных аналоговых выходов тока 4-20 мА. Однако специалистам в данной области техники должно быть понятно, что в соответствии с вариантами осуществления настоящего изобретения может использоваться больше или меньше таких отображений. Кроме того, поскольку каждый аналоговый выход может передавать одиночный параметр (такой как конкретный ток в пределах от 4 до 20 мА), то дополнительная информация, принимаемая устройством 116 через коммуникатор 36 контура, может передаваться на соответствующее устройство посредством модуля 120 беспроводной связи. Таким образом, отображение, сохраненное в устройстве 116, может связывать информацию (такую как температура процесса) от конкретного цифрового устройства управления процессом с конкретным аналоговым выходом, а любая дополнительная информация с того же самого цифрового устройства управления процессом будет передаваться на одно или более устройств, определенных в отображении, посредством модуля 120. Таким способом, дополнительная диагностическая или другая информация, обеспечиваемая с цифровых устройств управления процессом, может передаваться беспроводным способом на систему DCS или другие рабочие станции.
На фиг. 6 представлена блок-схема монтируемого в условиях эксплуатации устройства управления технологическим процессом, работающего с множеством цифровых устройств управления процессом и с распределенной системой управления (DCS). Монтируемое в условиях эксплуатации устройство 116 управлении технологическим процессом связано с системой DCS 200 через 4 отдельных коммуникационных канала. Устройство 116 выдает аналоговые выходные сигналы А01, А02, А03 на систему DCS 200 при приеме аналогового сигнала с системы DCS 200 через аналоговый вход AIN1. Устройство 116 связано с Fieldbus-сетью 202 через коммуникатор 36 контура (показанный на фиг. 5). В примере, показанном на фиг. 6, четыре цифровых устройства управления процессом также связаны с Fieldbus-сетью 202. Устройство D1 представляет собой передатчик данных температуры флюида в процессе, оперативно связанный с флюидом, используемым в процессе, и обеспечивающий передачу по сети 202 цифровых данных, относящихся к температуре флюида в процессе. Устройство D2 представляет собой передатчик данных давления флюида в процессе, оперативно связанный с флюидом, используемым в процессе, и обеспечивающий передачу по сети 202 цифровых данных, относящихся к давлению флюида в процессе. Устройство D3 представляет собой передатчик данных рН флюида в процессе, оперативно связанный с флюидом, используемым в процессе, и обеспечивающий передачу по сети 202 цифровых данных, относящихся к рН флюида в процессе. Устройство D4 представляет собой контроллер клапана для флюида в процессе, который управляет клапаном, связанным с ним, в ответ на информацию, принимаемую по сети 202.
На фиг. 7 представлено схематичное изображение приведенного для примера отображения в соответствии с вариантом осуществления настоящего изобретения. Отображение 300 может передаваться к устройству 116 или генерироваться в нем при конфигурировании системы. Отображение сохраняется на машиночитаемом носителе (таком как память), предпочтительно являющемся энергонезависимым, в устройстве 116 и связывает цифровую информацию от конкретных устройств с аналоговыми входами/выходами. Например, отображение 300 показывает устройство D1 как отображенное на аналоговый выход A02. Таким образом, информация о температуре флюида в процессе, предаваемая устройством D1 в контуре 202, будет приниматься устройством 116 и преобразовываться в аналоговый выходной сигнал, который выдается на аналоговый выход А02, и который, в конечном счете, принимается системой DCS 200. Дополнительно, давление и рН флюида в процессе, измеренные и переданные устройствами D2 и D3, соответственно будут преобразовываться в аналоговые сигналы на аналоговых выходах А03 и А01 соответственно. Таким способом, система DCS может принимать важную информацию о переменных процесса, несмотря на то что она не способна принимать или понимать сигналы шины FOUNDATIONTM Fieldbus. После того как система DCS вычислит или иным образом получит свой выходной сигнал управления, аналоговый выходной сигнал управления передается в устройство 116 через аналоговый вход AIN1 устройства 116. Устройство 116 затем преобразует аналоговый сигнал в сигнал сигналы шины FOUNDATIONTM Fieldbus, который обеспечивает эффект аналогового сигнала управления, и передает цифровой сигнал по контуру 202 на контроллер D4 клапана.
Отображение 300 может быть изменено пользователем или эксплуатационным обслуживающим персоналом либо путем взаимодействия с устройством 116 локальным образом, либо посредством его модуля 120 беспроводной связи. В действительности, в вариантах, где HART-совместимые устройства связаны с аналоговым выходным модулем устройства 116, такие HART-совместимые устройства могут быть конфигурированы дистанционным способом через модуль 120 беспроводной связи устройства 116.
На фиг. 8 показано схематичное представление трех монтируемых в условиях эксплуатации устройств управления технологическим процессом в соответствии с вариантами осуществления настоящего изобретения, которые используются для мультиплексирования и демультиплексирования результатов измерений ряда датчиков в аналоговые сигналы тока 4-20 мА системы DCS. Система 400 содержит пару монтируемых в условиях эксплуатации устройств 16 управления технологическим процессом (описаны выше со ссылкой на фиг. 2), связанных с другим монтируемым в условиях эксплуатации устройством 116 управления технологическим процессом по цифровому коммуникационному контуру 202 процесса. При таком выполнении устройство 116 может выбирать по запросу устройство 16 и конкретный датчик, связанный с ним, для считывания. Затем результат измерения может быть преобразован в аналоговый сигнал тока и подан в систему DCS 200. Дополнительные данные могут также передаваться устройством 116 посредством модуля 120 беспроводной связи (на фиг. 8 не показан).
Хотя описание до сих пор фокусировалось на отображении дискретных цифровых устройств управления процессом на индивидуальные аналоговые входы или выходы монтируемого в условиях эксплуатации устройства управления технологическим процессом, варианты осуществления настоящего изобретения также включают в себя отображение множества параметров, обеспеченных одним цифровым устройством управления процессом, на множество аналоговых входов/выходов. Например, передатчик сигналов температуры флюида процесса может отображать свой выходной сигнал переменной процесса на первый аналоговый выход, в то время как другая величина, такая как совпадение результатов измерений, отображается на второй аналоговый выход.
Таким образом, можно сделать вывод, что варианты осуществления настоящего изобретения обеспечат возможность аналоговым системам управления взаимодействовать с новыми цифровыми устройствами управления процессами. Кроме того, цифровая информация, помимо переменных процесса, может выдаваться на одно или более выбираемых цифровых устройств, тем самым обеспечивая получение выгоды из возможностей цифровой коммуникации устройств управления процессом, осуществляющих информационный обмен в цифровой форме.
Хотя настоящее изобретение описано со ссылками на варианты осуществления двухпроводного устройства управления технологическим процессом, имеющего четыре канала, специалистам в данной области техники должно быть понятно, что изменения по форме и в деталях могут быть выполнены без отклонения от сущности и объема изобретения, как определено в формуле изобретения. Например, хотя различные модули проиллюстрированы и описаны по отдельности, в явном виде предполагается, что некоторые такие модули могут быть физически воплощены вместе, например, на ориентированной на приложение специализированной интегральной схеме (ASIC). Кроме того, хотя контроллер 40 описан как один модуль, его функции могут быть распределены по множеству микропроцессоров, так что один микропроцессор может обеспечивать взаимодействие ввода/вывода низкого уровня, например, калибровку, линеаризацию и т.д., в то время как второй микропроцессор исполняет генерируемый пользователем алгоритм управления. Дополнительно, хотя описание сфокусировано на варианте, в котором входы и выходы предусмотрены через описываемые каналы, понятно, что некоторые входные сигналы процесса и выходные сигналы процесса могут передаваться от /на другие устройств управления процессами через контур управления процессами.
Данная группа изобретений относится к устройствам управления технологическими процессами. Технический результат заключается в расширении функциональных возможностей при управлении технологическими процессами. Он достигается тем, что устройство управления процессом для облегчения измерений и управления технологическим процессом содержит коммуникатор контура, память, выполненную с возможностью сохранения отображения, связывающего первый цифровой параметр с первым аналоговым модулем и второй цифровой параметр с вторым аналоговым модулем, контроллер, связанный с коммуникатором контура и выполненный с возможностью преобразования между первым параметром и информацией первого аналогового сигнала и преобразования между вторым цифровым параметром и информацией второго аналогового сигнала, первый аналоговый модуль, второй аналоговый модуль. Это устройство получает цифровую информацию от одного или более устройств управления процессом и обеспечивает связанный с этим аналоговый выходной сигнал. 18 з. и 2 н.п. ф-лы, 8 ил.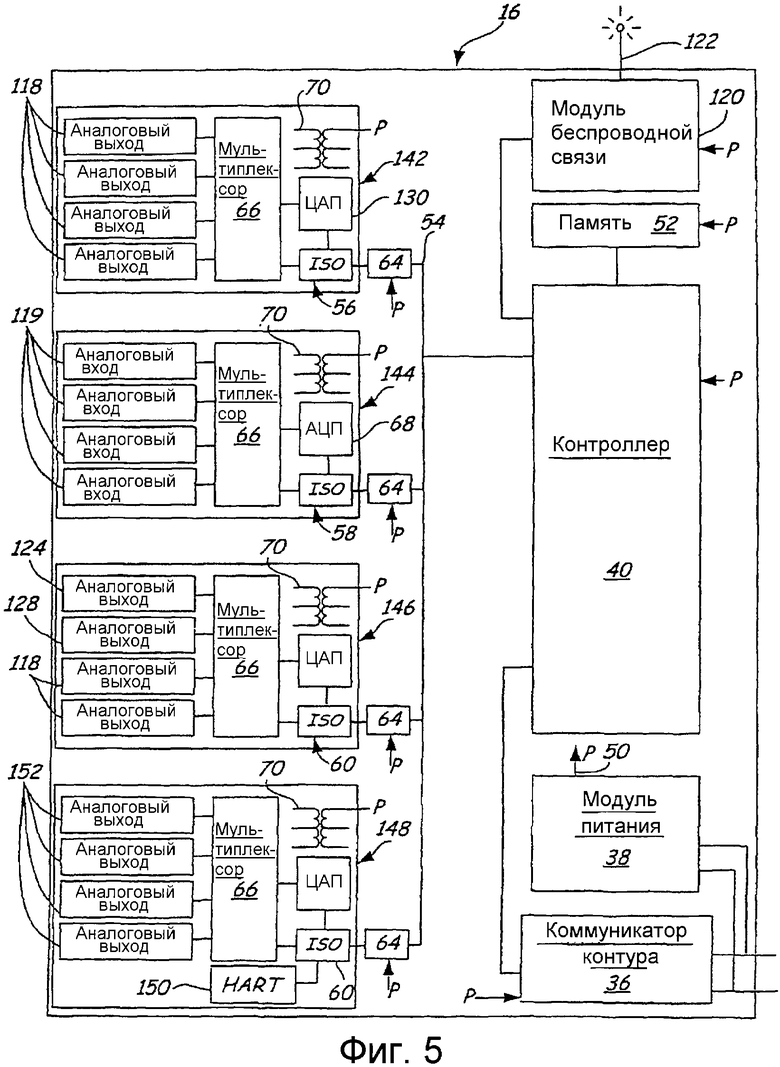
1. Устройство управления процессом для облегчения измерений и управления технологическим процессом, содержащее
коммуникатор контура, выполненный возможностью связи с коммуникационным контуром процесса и осуществления цифровой связи через контур;
память, выполненную с возможностью сохранения отображения, связывающего первый цифровой параметр с первым аналоговым модулем и второй цифровой параметр со вторым аналоговым модулем;
контроллер, связанный с коммуникатором контура и выполненный с возможностью преобразования между первым параметром и информацией первого аналогового сигнала и преобразования между вторым цифровым параметром и информацией второго аналогового сигнала;
первый аналоговый модуль, оперативно связанный с контроллером и выполненный с возможностью обеспечения ввода или вывода первого аналогового сигнала, представляющего информацию первого аналогового сигнала; и
второй аналоговый модуль, оперативно связанный с контроллером и выполненный с возможностью обеспечения ввода или вывода второго аналогового сигнала, представляющего информацию второго аналогового сигнала.
2. Устройство по п.1, в котором первый аналоговый модуль является аналоговым выходным модулем.
3. Устройство по п.2, в котором первый аналоговый модуль содержит микросхему цифровой связи протокола HART.
4. Устройство по п.2, в котором второй аналоговый модуль является аналоговым выходным модулем.
5. Устройство по п.2, в котором второй аналоговый модуль является аналоговым входным модулем.
6. Устройство по п.1, в котором первый и второй аналоговые модули являются аналоговыми входными модулями.
7. Устройство по п.1, дополнительно содержащее модуль питания, выполненный с возможностью связи с коммуникационным контуром процесса и обеспечения полностью питания устройства мощностью, получаемой из контура.
8. Устройство по п.1, в котором коммуникатор контура представляет собой коммуникатор шины FOUNDATION Fieldbus.
9. Устройство по п.1, дополнительно содержащее модуль беспроводной связи, связанный с контроллером.
10. Устройство по п.9, в котором устройство является конфигурируемым посредством модуля беспроводной связи.
11. Устройство по п.10, в котором первое устройство управления процессом обеспечивает дополнительную цифровую информацию через коммуникатор контура, и в котором контроллер обеспечивает выполнение передачи модулем беспроводной связи на основе дополнительной цифровой информации.
12. Устройство по п.1, в котором отображение является изменяемым.
13. Устройство по п.12, в котором отображение является изменяемым посредством модуля беспроводной связи.
14. Устройство по п.1, в котором первый аналоговый модуль связывает аналоговый сигнал тока 4-20 мА с информацией первого аналогового сигнала.
15. Устройство по п.1, в котором контроллер дополнительно конфигурирован для выполнения операции над первым параметром.
16. Устройство по п.15, в котором дополнительная операция определена в отображении.
17. Устройство по п.1, в котором контроллер выполняет функцию управления и генерирует выходной сигнал управления на основе функции управления.
18. Устройство по п.17, в котором выходной сигнал управления передается через коммуникатор контура.
19. Устройство по п.1, в котором второй цифровой параметр относится к второму цифровому устройству управления процессом, связанному с коммуникационным контуром процесса.
20. Система управления процессом для облегчения измерений и управления технологическим процессом, содержащая
распределенную систему управления, имеющую, по меньшей мере, один аналоговый коммуникационный канал;
первое устройство управления процессом, имеющее аналоговый модуль, связанный с упомянутым, по меньшей мере, одним коммуникационным каналом распределенной системы управления, и имеющее коммуникатор контура, связанный с цифровым коммуникационным контуром процесса; и другое устройство управления процессом, связанное с цифровым коммуникационным контуром процесса, причем упомянутое другое устройство управления процессом является отдельным и отличающимся от упомянутого первого устройства управления процессом;
при этом упомянутое первое устройство управления технологическим процессом выполняет преобразование между аналоговыми сигналами, передаваемыми по другому аналоговому каналу, и цифровыми сигналами, передаваемыми посредством коммуникатора контура к упомянутому другому устройству управления процессом или от него.
| DE 19824146 A1, 16.12.1999 | |||
| US 6304934 B1, 16.10.2001 | |||
| СЕТЬ, ОБЕСПЕЧИВАЮЩАЯ ВОЗМОЖНОСТИ ИСПОЛЬЗОВАНИЯ МНОЖЕСТВА ВИДОВ СРЕДСТВ ПЕРЕДАЧИ ИНФОРМАЦИИ | 1994 |
|
RU2127960C1 |
| СТРУКТУРИРОВАННАЯ СИСТЕМА МОНИТОРИНГА И УПРАВЛЕНИЯ ИНЖЕНЕРНЫМ ОБОРУДОВАНИЕМ ОБЪЕКТА | 1998 |
|
RU2133490C1 |

