Изобретение относится к области электротехники и касается особенностей конструктивного выполнения первой в мире модульно-дисковой универсальной электрической машины Белашова, у которой множество многовитковых обмоток, не меняя направления движения тока в проводниках, проходят сквозь одну или множество магнитных систем возбуждения без изменения напряжения и тока в многовитковых обмотках, где амплитуда сигнала постоянного тока не меняет своих характеристик во времени. Изобретение предназначено для использования в качестве низкооборотных генераторов постоянного или переменного тока, сверхскоростных электрических машин постоянного тока, двигателей переменного тока или развернутого линейного двигателя постоянного или переменного тока, которые могут быть использованы в энергетике, промышленности и народном хозяйстве для вращения силовых приводов, технических сооружений, транспортных средств, подъемных механизмов, транспортеров, систем автоматического регулирования и управления механическими устройствами, измерительных и эталонных устройств в приборостроении, а также в военных целях.
Известна ранняя модель электромотора (колесо Барлоу), изобретенная в 1823 году английским физиком и математиком Питером Барлоу, но никто во всем мире до сегодняшнего дня не смог изобрести электрическую машину, у которой множество многовитковых обмоток, не меняя направления движения тока в проводниках, дискового диэлектрического ротора проходят сквозь один или множество замкнутых магнитных систем возбуждения. (См. биографический справочник "Физики", автор книги Ю.А.Храмов, город Киев издательство "Наукова думка", 1977 год - аналог).
Известны законы и математические формулы Белашова, которые вносят коренные изменения в уровень познания электрических и электротехнических явлений в области формирования и измерения электрических сигналов постоянного или переменного тока. (См. патент Российской Федерации №2175807, кл. H02K 23/54 - аналог).
Известно устройство вращения магнитных систем Белашова, которое выполнено в виде первой в мире электрической машины Белашова ЭМПТБ-01. (См. заявку №2005129781/06 (033405) от 28 сентября 2005 года - аналог).
Известно устройство вращения магнитных систем Белашова, расположенных в пространстве, на базе которого была изобретена модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01. (См. заявку №2005140396/06 (033405) от 26 декабря 2005 года - аналог).
Известен коллектор Белашова, который быстро устанавливается и снимается с электрических машин. (См. патент Российской Федерации №2073296, кл Н02K 23/54, 27/02 - аналог).
Известна универсальная электрическая машина, содержащая статор с многовитковыми обмотками, ротор с магнитной системой возбуждения, включающей магнитопроводы с полюсами, быстросъемный составной коллектор с контактными пластинами, щеткодержатель с щетками, систему автоматического слежения и регулирования, элементы качения или скольжения, которые через статор взаимодействует с валом ротора. (См. патент Российской Федерации "Универсальная электрическая машина Белашова" №2175807, кл Н02K 23/54, 27/02 - прототип).
Цель изобретения - повысить кпд, надежность, технологичность и безопасность энергосберегающих, сверхскоростных и высокомоментных электрических машин постоянного тока и двигателей переменного тока, низкооборотных генераторов постоянного или переменного тока. Уменьшить вес и себестоимость электрических машин. Упростить и усовершенствовать технологию изготовления и ремонта модульно-дисковых универсальных электрических машин Белашова. Предоставить технические характеристики действующего макета МДУЭМБ-01, подтверждающего работу первой в мире модульно-дисковой универсальной электрической машины, у которой множество многовитковых обмоток дискового ротора проходят сквозь однородное магнитное поле одной или множества магнитных систем статора без каких-либо изменений напряжения и тока в многовитковых обмотках, где амплитуда сигнала постоянного тока не меняет своих характеристик во времени.
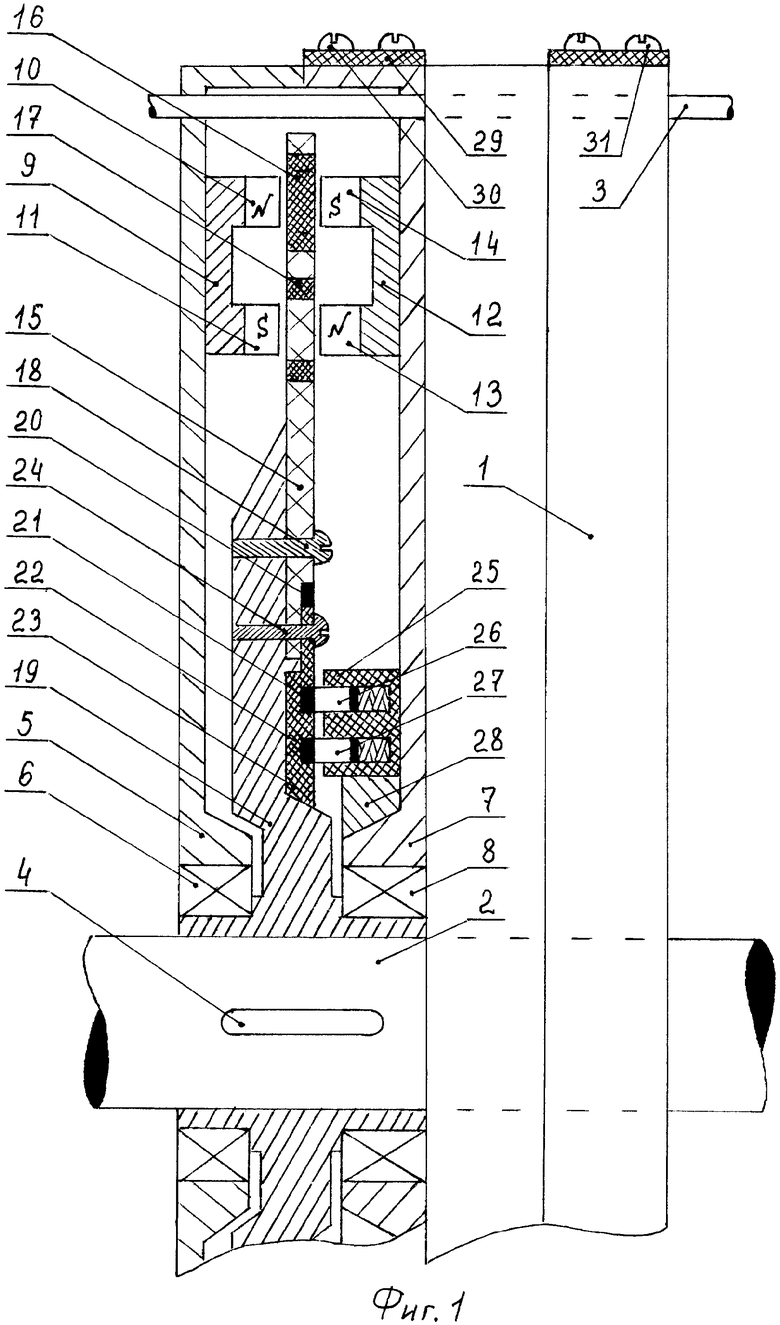
На фиг.1 изображена первая в мире модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01.
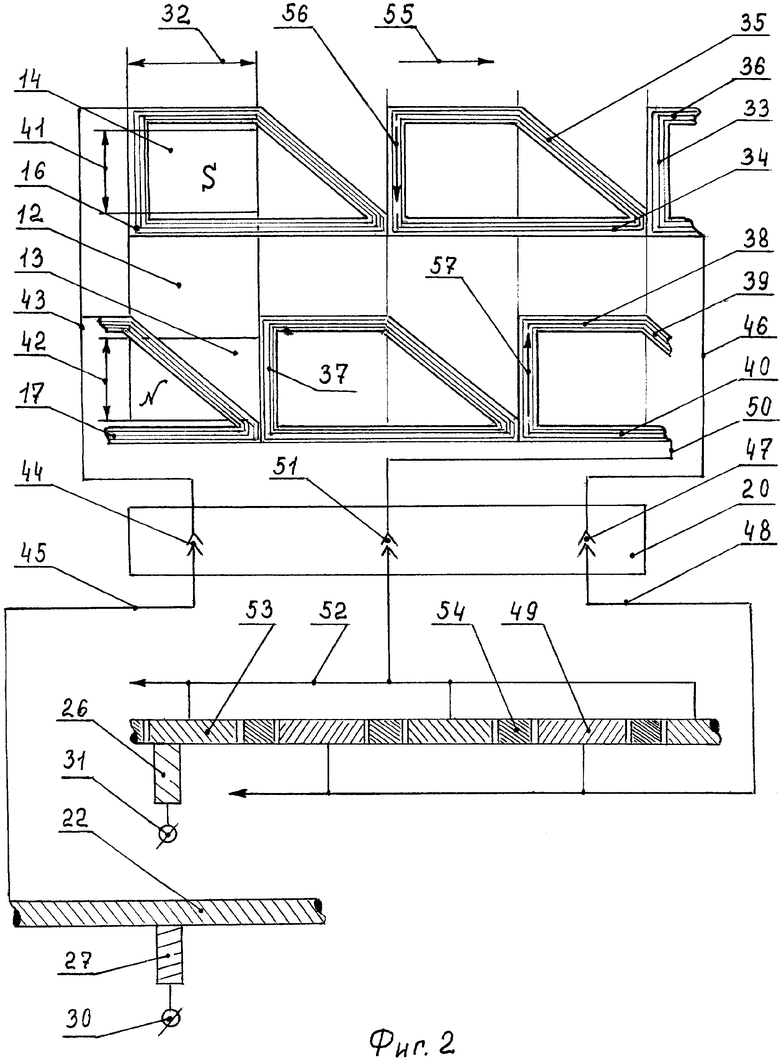
На фиг.2 изображена функционально-электрическая схема работы модульно-дисковой универсальной электрической машины Белашова МДУЭМБ-01.
На фиг.3 изображен график постоянного тока первого ряда множества многовитковых обмоток модульно-дисковой универсальной электрической машины Белашова МДУЭМБ-01.
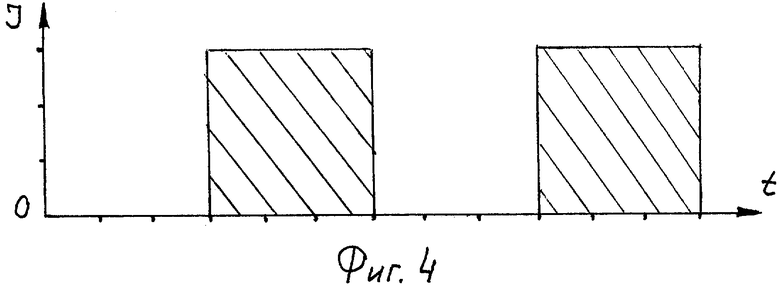
На фиг.4 изображен график постоянного тока второго ряда множества многовитковых обмоток модульно-дисковой универсальной электрической машины Белашова МДУЭМБ-01.
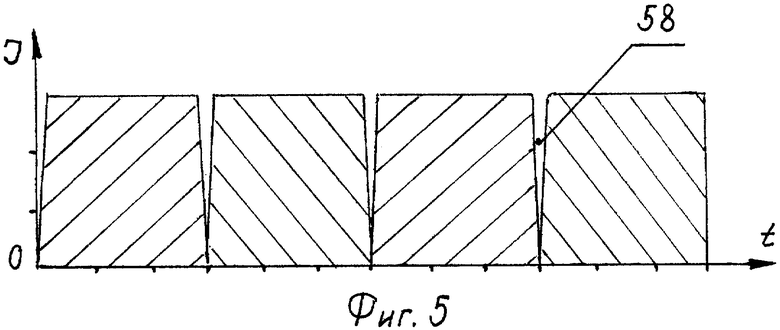
На фиг.5 изображен график постоянного тока первого и второго рядов многовитковых обмоток модульно-дисковой универсальной электрической машины Белашова МДУЭМБ-01, которые соединены параллельно и расположены в чередующейся последовательности внутри каждого рабочего сектора.
На фиг.6 изображен график постоянного тока первого и второго рядов многовитковых обмоток модульно-дисковой универсальной электрической машины Белашова МДУЭМБ-01, которые соединены последовательно и расположены в одном рабочем секторе, но в чередующейся последовательности.
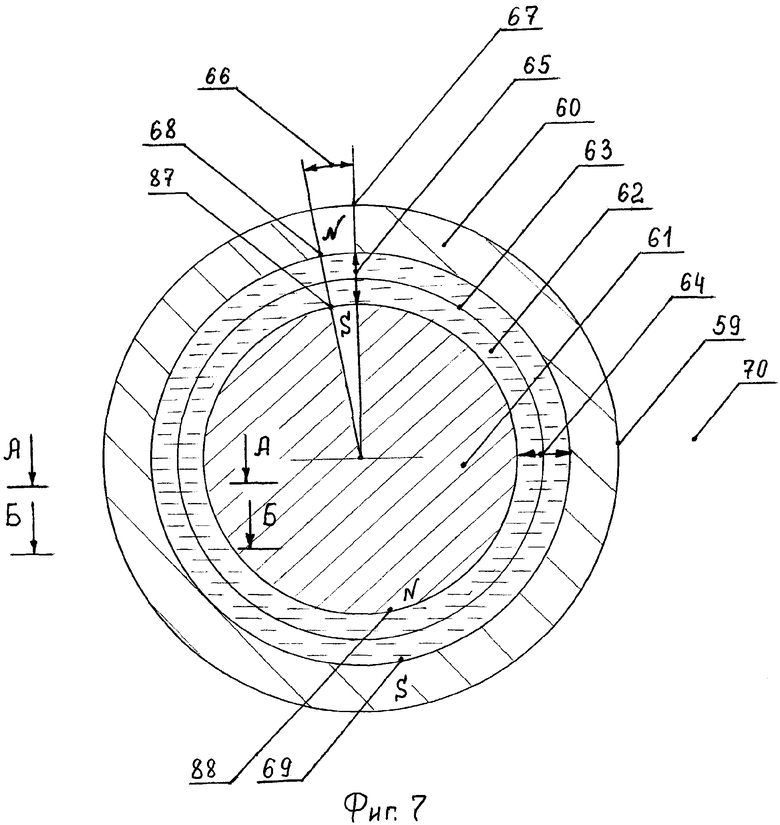
На фиг.7 изображен второй этап формирования механизма автономного вращения магнитных систем, расположенных в пространстве.
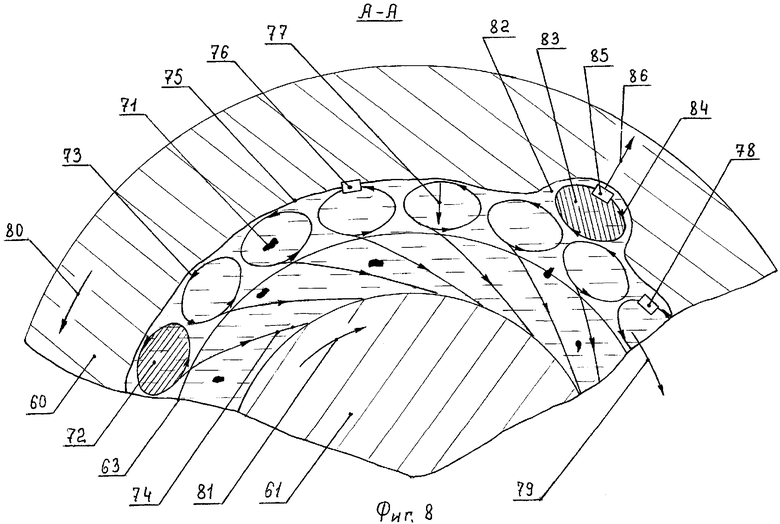
На фиг.8 изображен механизм автономного вращения магнитных систем, расположенных в пространстве с одной магнитной системой, на основании которого была изобретена модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01.
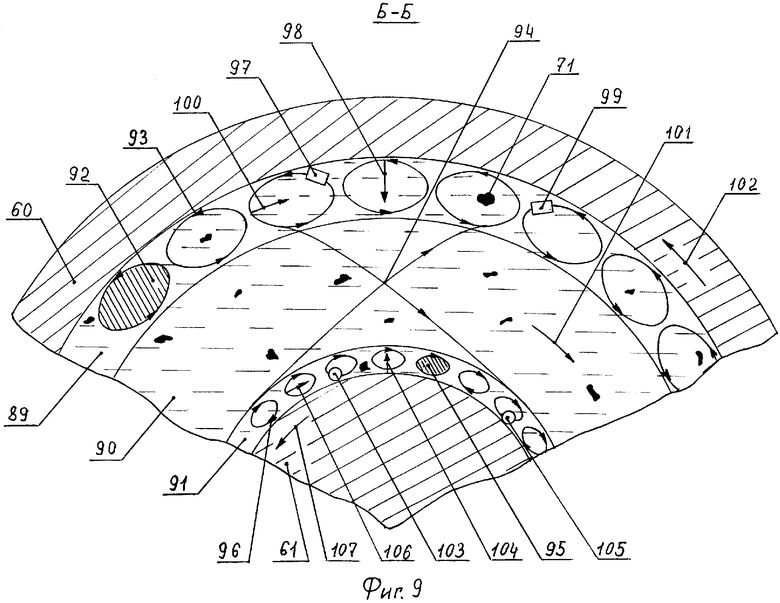
На фиг.9 изображен механизм автономного вращения магнитных систем, расположенных в пространстве с двумя магнитными системами, на основании которого была изобретена модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01.
Уникальность этого технического решения заключается в том, что модульно-дисковая универсальная электрическая машина выполнена в виде съемного модуля. Каждый модуль содержит левое и правое основания корпуса, где размещено четное или нечетное количество рядов магнитных систем возбуждения статора, расположенных через равномерные промежутки и взаимодействующих между собой противоположными полюсами. Магнитные системы возбуждения статора могут быть изготовлены из постоянных магнитов, электромагнитов и их сочетанием. Внутри модуля размещена подвижная жесткость с дисковым диэлектрическим ротором, съемным валом и средством фиксации вала. Дисковый диэлектрический ротор выполнен из четного или нечетного количества рядов, состоящих из множества многовитковых обмоток, которые через разъемное соединение электрически связаны с контактными пластинами и токосъемным кольцом быстросъемного составного коллектора. Множество многовитковых обмоток четного или нечетного количества рядов могут иметь параллельное, последовательное или смешанное соединение проводников. Рабочая часть множества многовитковых обмоток должна соответствовать высоте каждого магнита южного или северного полюса. Дисковый диэлектрический ротор, закрепленный на подвижной жесткости, разделен на множество секторов, которые расположены через равномерные промежутки. Внутри каждого сектора множество многовитковых обмоток имеют рабочую и нерабочие части обмоток. Щеточный механизм, имеющий токопроводящие подпружиненные щетки, взаимодействует с быстросъемным составным коллектором, устройством передачи электрической энергии и юстировочным устройством, включающим систему автоматического регулирования и управления. Для точного вхождения множества многовитковых обмоток в каждый рабочий сектор рабочие контактные пластины механически связаны с токопроводящей подпружиненной щеткой, юстировочным устройством и системой автоматического регулирования и управления. Нерабочие контактные пластины быстросъемного коллектора должны соответствовать ширине токопроводящей подпружиненной щетки. На левом и правом внешнем основаниях подвижной жесткости размещены элементы качения или скольжения, которые связаны с левым и правым основаниями корпуса. Внутреннее основание подвижной жесткости взаимодействует со съемным валом через средство фиксации съемного вала. Причем модульно-дисковая универсальная электрическая машина может быть выполнена в виде отдельного модуля, состоящего из низкооборотного генератора постоянного или переменного тока, сверхскоростной электрической машины постоянного тока, двигателя переменного тока или развернутого линейного двигателя постоянного или переменного тока, у которой множество многовитковых обмоток четного или нечетного количества рядов проходят сквозь однородное магнитное поле одного или множества магнитных систем статора без каких-либо изменений напряжения и тока, где амплитуда сигнала постоянного тока не меняет своих характеристик во времени.
Модульно-дисковая универсальная электрическая машина, фиг.1, содержит как минимум один съемный модуль 1, имеющий съемный вал 2, устройство крепления модулей 3 и средство фиксации съемного вала 4. Каждый съемный модуль содержит левое основание корпуса 5, опирающегося на элементы качения или скольжения 6, и правое основание корпуса 7, опирающегося на элементы качения или скольжения 8. По периметру внутренней части левого основания корпуса 5 расположено четное или нечетное количество рядов магнитных систем статора. Первая магнитная система статора выполнена в виде одного или множества подковообразных магнитов, имеющих магнитопровод 9, магнит северного полюса 10 и магнит южного полюса 11. По периметру внутренней части правого основания корпуса 7 расположено четное или нечетное количество рядов магнитных систем статора. Вторая магнитная система статора выполнена в виде одного или множества подковообразных магнитов, имеющих магнитопровод 12, магнит северного полюса 13 и магнит южного полюса 14. При взаимодействии первой магнитной системы левого основания корпуса 5 и второй магнитной системы правого основания корпуса 7 направление движения магнитного потока одной или множества магнитных систем происходит от магнита северного полюса 10 на магнит южного полюса 14 и магнита северного полюса 13 на магнит южного полюса 11. Магнит северного полюса 10 и магнит южного полюса 11 связаны между собой магнитопроводом 9, а магнит северного полюса 13 и магнит южного полюса 14 связаны между собой магнитопроводом 12. Каждый съемный модуль 1 содержит четное или нечетное количество рядов, состоящих из множества многовитковых обмоток. Дисковый диэлектрический ротор 15 содержит множество многовитковых обмоток первого ряда 16 и множество многовитковых обмоток второго ряда 17. При помощи элементов крепления 18 дисковый диэлектрический ротор 15 крепится к подвижной жесткости 19. Множество многовитковых обмоток первого ряда 16 и множество многовитковых обмоток второго ряда 17 через разъемное соединение 20 связаны с контактными пластинами 21 и токосъемным кольцом 22 быстросъемного составного коллектора 23, который через элементы крепления 24 связан с подвижной жесткостью 19. На левом внешнем основании подвижной жесткости 19 размещены элементы качения или скольжения 6, которые связаны с левым основанием корпуса 5. На правом внешнем основании подвижной жесткости 19 размещены элементы качения или скольжения 8, которые связаны с правым основанием корпуса 7. Внутреннее основание подвижной жесткости 19 взаимодействует со съемным валом 2 через средство фиксации съемного вала 4. На правом основании корпуса 7 размещен щеточный механизм 25, имеющий токопроводящую подпружиненную щетку 26, токопроводящую подпружиненную щетку 27, юстировочное устройство и систему автоматического регулирования и управления 28. На правом основании корпуса 7 размещено устройство передачи электрической энергии 29, имеющее соединительную клемму 30 и соединительную клемму 31. Дисковый диэлектрический ротор 15, фиг.2, разделен на множество секторов 32. Внутри каждого сектора множество многовитковых обмоток первого ряда 16 имеют рабочую часть обмотки 33 и нерабочие части обмоток 34, 35, 36. Внутри каждого сектора множество многовитковых обмоток второго ряда 17 имеют рабочую часть обмотки 37 и нерабочие части обмоток 38, 39, 40. Один или множество полюсов первой магнитной системы статора, левого основания корпуса 5 и второй магнитной системы правого основания корпуса 7 расположены через равномерные промежутки внутри каждого сектора 32 и взаимодействуют между собой противоположными полюсами. Рабочая часть обмотки 33 множества многовитковых обмоток первого ряда 16 имеет рабочую зону 41, которая должна соответствовать высоте каждого магнита южного полюса 14 и магнита северного полюса 10. Рабочая часть обмотки 37 множества многовитковых обмоток второго ряда 17 имеет рабочую зону 42, которая должна соответствовать высоте каждого магнита северного полюса 13 и магнита южного полюса 11. Множество многовитковых обмоток первого ряда 16 и множество многовитковых обмоток второго ряда 17 могут иметь параллельное, последовательное или смешанное соединение проводников. Начала всех многовитковых обмоток первого ряда 16 и многовитковых обмоток второго ряда 17 должны быть объединены в один проводник 43, который через контакт 44 разъемного соединения 20, проводник 45 связан с токосъемным кольцом 22, токопроводящей подпружиненной щеткой 27 и соединительной клеммой 30 устройства передачи электрической энергии 29. Конец всех многовитковых обмоток первого ряда 16 через проводник 46, контакт 47 разъемного соединения 20, проводник 48 связан с контактными пластинами 49 быстросъемного составного коллектора 23, токопроводящей подпружиненной щеткой 26 и соединительной клеммой 31 устройства передачи электрической энергии 29. Конец всех многовитковых обмоток второго ряда 17 через проводник 50, контакт 51 разъемного соединения 20, проводник 52 связан с контактными пластинами 53 быстросъемного составного коллектора 23, токопроводящей подпружиненной щеткой 26 и соединительной клеммой 31 устройства передачи электрической энергии 29. Нерабочие контактные пластины 54 должны соответствовать ширине токопроводящей подпружиненной щетки 26 для точного вхождения многовитковых обмоток первого ряда 16 и многовитковых обмоток второго ряда 17 в каждый рабочий сектор 32. Токопроводящая подпружиненная щетка 27 может располагаться в любом месте токосъемного кольца 22. Для вращения дискового диэлектрического ротора по часовой стрелке 55 направление движения тока в множестве многовитковых обмоток первого ряда 16 должно быть против часовой стрелки 56, а направление движения тока в множестве многовитковых обмоток второго ряда 17 должно быть по часовой стрелке 57. Юстировочное устройство и система автоматического регулирования и управления 28 механически и электрически связаны с токопроводящей подпружиненной щеткой 26 и предназначены для точного вхождения многовитковых обмоток первого ряда 16 и многовитковых обмоток второго ряда 17 в каждый рабочий сектор 32. Если юстировочное устройство и система автоматического регулирования и управления 28 плохо отрегулированы или настроены, то график постоянного тока первого и второго рядов, фиг.5, многовитковых обмоток модульно-дисковой универсальной электрической машины будет иметь внутренние разломы 58. Диэлектрический ротор модульно-дисковой универсальной электрической машины может быть выполнен в виде цилиндра. Для улучшения технических характеристик модульно-дисковой универсальной электрической машины все рабочие сектора ротора 32 должны быть изолированы друг от друга и иметь систему теплообмена, а в цепи быстросъемного составного коллектора 23 можно использовать механический или электронный коммутатор. Все магнитные системы четного или нечетного количества рядов модульно-дисковой универсальной электрической машины могут быть изготовлены из постоянных магнитов, электромагнитов и их сочетанием. Причем модульно-дисковая универсальная электрическая машина МДУЭМБ-01 может быть выполнена в виде отдельного модуля, состоящего из низкооборотного генератора постоянного или переменного тока, сверхскоростной электрической машины постоянного тока, двигателя переменного тока или развернутого линейного двигателя постоянного или переменного тока, у которой множество многовитковых обмоток первого ряда 16 и множество многовитковых обмоток второго ряда 17 четного или нечетного количества рядов и модулей проходят сквозь однородное магнитное поле четного или нечетного количества магнитных систем статора без каких-либо изменений напряжения и тока в многовитковых обмотках первого ряда 16 и многовитковых обмоток второго ряда 17, где амплитуда сигнала постоянного тока не меняет своих характеристик во времени.
Первая в мире модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01, фиг.1, была изобретена на основании открытия второго этапа механизма автономного вращения планет Солнечной системы. Механизм запуска и первый этап автономного вращения магнитных систем, находящихся в пространстве, хорошо описан в заявках
№2005129781/06 (033405) от 28 сентября 2005 года,
№2005140396/06 (033405) от 26 декабря 2005 года.
Данные заявки, в которых описаны устройство вращения магнитных систем Белашова, выполненное в виде первой в мире действующей модели электрической машины постоянного тока ЭМПТБ-01, и механизм автономного вращения магнитных систем, расположенных в пространстве, были признаны промышленно неприменимыми в Российской Федерации.
Второй этап работы механизма автономного вращения активных планет Солнечной системы, фиг 7, состоит из материального тела 59 (например, планеты Земля), содержащего внешнюю оболочку 60 (земная кора) и внутреннюю оболочку 61 (ядро планеты), между которыми расположен промежуточный слой Белашова 62 (состоящий из жидкой субстанции магмы с обломками литосферы), имеющий среднюю линию 63. Вследствие движения жидкой субстанции магмы с обломками литосферы, внутри материального тела 59, которое постоянно вращается, произошло расширение промежуточного слоя Белашова 62 в его экваториальной части. Из этого следует, что ширина промежуточного слоя Белашова 62 на экваторе 64 материального тела 59 больше чем высота промежуточного слоя Белашова 62 на полюсах 65. В результате этих изменений протяженность средней линии промежуточного слоя 63 на экваторе 64 материального тела 59 больше чем на полюсах 65. Из-за этого расстояние от средней линии промежуточного слоя 63 до кромки внешнего основания материального тела 59 на экваторе 64 будет больше, чем расстояние от средней линии промежуточного слоя 63 до кромки внешнего основания на полюсах 65. Изменение расстояния от средней линии промежуточного слоя 63 влияет на ускорение свободного падения тел в пространстве на экваторе и северном или южном полюсе, что экспериментально подтверждено и доказано. Перемещение промежуточного слоя Белашова 62, состоящего из жидкой субстанции магмы с обломками литосферы, внутри материального тела 59 происходит под угловым смещением 66. Наклон углового смещения 66 перемещения промежуточного слоя Белашова 62 расположен между географическим полюсом 67 и северным магнитным полюсом 68 материального тела 59. В ранее указанных заявках подробно изложены все этапы формирования магнитных полюсов, где северный магнитный полюс 68 и южный магнитный полюс 69 расположены на внутренней части внешней оболочки 60. Вследствие неравномерного перемещения промежуточного слоя Белашова 62 происходит небольшой дрейф углового смещения 66 магнитного полюса 68 материального тела 59. Необходимо особо подчеркнуть, что при увеличении массы внешней оболочки 60, уменьшения ширины, увеличения плотности и изменения наклона углового смещения 66 промежуточного слоя Белашова 62, будет меняться скорость вращения материального тела 59, находящегося в пространстве 70, а вследствие этого, и ускорение свободного падения тел в пространстве.
Формирование и работа второго этапа механизма автономного вращения одной магнитной системы материального тела 59, фиг.8, имеющего северный магнитный полюс 68 и южный магнитный полюс 69, осуществляется посредством взаимодействия внешней оболочки 60 и внутренней оболочкой ядра 61 через промежуточный слой Белашова 62. Промежуточный слой Белашова 62 состоит из внешней части, где происходит турбулентное перемещение жидкой субстанции магмы с обломками литосферы 71, и нижней части, где происходит ламинарное перемещение жидкой субстанции магмы с обломками литосферы, которые в хаотическом порядке из верхней части промежуточного слоя Белашова 62 могут свободно переходить через среднюю линию промежуточного слоя 63 на нижнюю часть и обратно. Турбулентное перемещение жидкой субстанции магмы с обломками литосферы создает множество вихревых эллиптических колец 72, которые являются проводником электрического тока и перемещаются против часовой стрелки 73 в верхней части промежуточного слоя Белашова 62. Ламинарное перемещение жидкой субстанции магмы с обломками литосферы 71 осуществляется по сложной траектории 74, имеющей наклон углового смещения 66, в нижней части промежуточного слоя Велашова 62. Необходимо подчеркнуть, что основной магнитный поток от северного полюса 68 на южный магнитный полюс 69 перемещается по внутренней части внешней оболочки 60, ниже поверхности Мохоровичича 75. Так как жидкая субстанция магмы является проводником электрического тока, то по правилу правой руки, которое заключается в следующем, если ладонь правой руки 76 расположить так, чтобы магнитные силовые линии входили в нее, а большой палец указывал направление движения проводника 73 в магнитном поле вихревых эллиптических колец 72, то вытянутые четыре пальца укажут направление индуктированной эдс 77, которая будет направлена во внутрь промежуточного слоя Белашова 62. Возникновение индуктированной эдс 77 происходит на восходящей части дуги вихревых эллиптических колец 72, которая примыкает к внутренней части внешней оболочки 60. Далее по правилу левой руки, если левую руку 78 расположить в магнитное поле так, чтобы магнитные силовые линии входили в ладонь, и направить вытянутые четыре пальца по направлению тока 77, то отогнутый большой палец укажет направление силы 79, действующей на проводник. Возникновение вектора силы 79 происходит на нисходящей части дуги вихревых эллиптических колец 72, которая примыкает к внутренней части внешней оболочки 60. В данном случае вектор силы 79 промежуточного слоя Белашова 62 будет направлен по часовой стрелке, а вектор силы внешней оболочки 60 будет направлен против часовой стрелки 80, который заставит перемещаться внутреннюю оболочку ядра 61 по часовой стрелке 81. При этом необходимо напомнить, что механизм образования геопатогенных зон в сфере материального тела 59 действует по тому же принципу. Например, в твердом углублении 82 внешней оболочки 60 образовался вихрь 83, который является проводником электрического тока, где жидкая субстанция магмы с обломками литосферы 71 перемещается по часовой стрелке 84. Если ладонь правой руки 85 расположить так, чтобы магнитные силовые линии входили в нее, а большой палец указывал направление движения проводника 84 в магнитном поле внешней оболочки 60, то вытянутые четыре пальца укажут направление индуктированной эдс 86, которая будет направлена на кромку внешнего основания 60 материального тела 59. В связи с тем, что в твердом углублении 82 нет возможности для использования индуктированной эдс, то вся ее энергия будет направлена на кромку внешнего основания 60, что влечет за собой образования цунами, торнадо и других неприятных последствий, которые хорошо изложены в описании ранее указанных заявок. При рассмотрении сил, действующих на внешнюю и внутреннюю оболочки инерционной системы материального тела 59, необходимо пользоваться вторым и третьим законами Ньютона, а также знать состав и плотность жидкой субстанции магмы в промежуточном слое Белашова 62.
Формирование второго этапа механизма автономного вращения двух магнитных систем материального тела 59, имеющего северный магнитный полюс 68 и южный магнитный полюс 69 внешней оболочки 60.
Северный магнитный полюс 68, фиг.2, внешней оболочки 60 взаимодействует с южным магнитным полюсом 87 внутренней оболочкой ядра 61. Южный магнитный полюс 69 внешней оболочки 60 взаимодействует с северным магнитным полюсом 88 внутренней оболочкой ядра 61. Работа второго этапа механизма автономного вращения двух магнитных систем материального тела 59, фиг.9, осуществляется посредством взаимодействия внешней оболочки 60 и внутренней оболочки ядра 61 через промежуточный слой Белашова 62. Промежуточный слой Велашова 62 состоит из внешней части 89, где происходит турбулентное перемещение жидкой субстанции магмы с обломками литосферы 71, средней части 90, где происходит ламинарное перемещение жидкой субстанции магмы с обломками литосферы 71, и нижней части 91, где происходит турбулентное перемещение жидкой субстанции магмы с обломками литосферы 71, которые в хаотическом порядке из верхней части 89 промежуточного слоя Белашова 62 могут свободно переходить через среднюю часть 90 на нижнюю часть 91 и обратно. Турбулентное перемещение жидкой субстанции магмы с обломками литосферы 71 внешней части 89 создает множество вихревых эллиптических колец 92, которые перемещаются против часовой стрелки 93. Ламинарное перемещение жидкой субстанции магмы с обломками литосферы 71 в средней части 90 перемещается по сложной траектории 94, имеющей наклон углового смещения 66. Турбулентное перемещение жидкой субстанции магмы с обломками литосферы 71 нижней части 91 создает множество вихревых эллиптических колец 95, которые перемещаются по часовой стрелке 96. Необходимо подчеркнуть, что основной магнитный поток от северного полюса 68 на южный магнитный полюс 69 перемещается по внутренней части внешней оболочки 60, а основной магнитный поток от северного полюса 88 на южный магнитный полюс 87 перемещается по внутренней и внешней частям внутренней оболочки ядра 61. Так как жидкая субстанция магмы с обломками литосферы 71 является проводником электрического тока, то по правилу правой руки, которое заключается в следующем: если ладонь правой руки 97 расположить так, чтобы магнитные силовые линии входили в нее, а большой палец указывал направление движения проводника 93 в магнитном поле вихревых эллиптических колец 92, то вытянутые четыре пальца укажут направление индуктированной эдс 98, которая будет направлена во внутрь промежуточного слоя Белашова 62. Возникновение индуктированной эдс 98 происходит на восходящей части дуги вихревых эллиптических колец 92, которые примыкают к внутренней части внешней оболочки 60. Далее по правилу левой руки, если левую руку 99 расположить в магнитное поле так, чтобы магнитные силовые линии входили в ладонь и направить вытянутые четыре пальца по направлению тока 98, то отогнутый большой палец укажет направление силы 100, действующей на проводник. Возникновение вектора силы 100 происходит на нисходящей части дуги вихревых эллиптических колец 92, которые примыкают к средней части 90 промежуточного слоя Белашова 62. В данном случае вектор силы 100 внешней части 89 заставляет перемещаться среднюю часть 90, где происходит ламинарное перемещение жидкой субстанции магмы с обломками литосферы 71 по часовой стрелке 101, а вектор силы внешней оболочки 60 будет направлен против часовой стрелки 102. Так как жидкая субстанция магмы является проводником электрического тока, то по правилу правой руки, которое заключается в следующем: если ладонь правой руки 103 расположить так, чтобы магнитные силовые линии входили в нее, а большой палец указывал направление движения проводника 96 в магнитном поле вихревых эллиптических колец 95 магнитной системы внутренней оболочки ядра 61, то вытянутые четыре пальца укажут направление индуктированной эдс 104, которая будет направлена во внутрь промежуточного слоя Белашова 62. Возникновение индуктированной эдс 104 происходит на восходящей части дуги вихревых эллиптических колец 95, которые примыкают к внутренней оболочки ядра 61. Далее по правилу левой руки, если левую руку 105 расположить в магнитное поле так, чтобы магнитные силовые линии входили в ладонь и направить вытянутые четыре пальца по направлению тока 104, то отогнутый большой палец укажет направление силы 106, действующей на проводник. Возникновение вектора силы 106 происходит на нисходящей части дуги вихревых эллиптических колец 95, которые примыкают к внутренней оболочки ядра 61. В данном случае вектор силы 106 нижней части 91 промежуточного слоя Белашова 62 заставляет перемещаться среднюю часть 90, где происходит ламинарное перемещение жидкой субстанции магмы с обломками литосферы 71, по часовой стрелке 101, а вектор силы внутренней оболочки ядра 61 будет направлен против часовой стрелки 107. При рассмотрении сил, действующих на внешнюю и внутреннюю оболочки инерционной системы материального тела 59, необходимо пользоваться вторым и третьим законами Ньютона, а также знать состав и плотность жидкой или газообразной субстанции промежуточного слоя Белашова 62.
Необходимо особо подчеркнуть, если по каким-либо причинам отсуствует внешняя часть 89 промежуточного слоя Белашова 62 или сильно ослаблена внешняя магнитная система с северным магнитным полюсом 68 и южным магнитным полюсом 69, то внешняя оболочка 60 материального тела 59 будет вращаться по часовой стрелке как планета Венера.
Для проведения научно-исследовательских работ и доказательства работы механизма автономного вращения магнитных систем находящихся в пространстве был изготовлен действующий макет механизма вращения планет Солнечной системы, который имеет четыре степени подвижности и состоит из:
- внешней оболочки с магнитной системой, которая расположена на элементах качения,
- внутренней оболочки с магнитной системой, которая расположена на элементах качения,
- промежуточного слоя Белашова, который расположен на элементах качения и отображает ламинарное течение жидкой субстанции магмы,
- внутри промежуточного слоя Белашова на элементах качения расположены многовитковые обмотки, которые отображают турбулентное течение жидкой субстанции магмы,
- в пространстве Солнечной системы материальные тела, к которым относятся планеты Земля, Венера, Марс и т.д., имеют пятую степень подвижности, это вращение материальных тел вокруг центральной звезды Солнца.
После подачи постоянного напряжения на многовитковые обмотки промежуточного слоя Белашова они начинают вращаться между внутренним магнитным полем внешней оболочки и внешним магнитным полем внутренней оболочки однородного магнитного поля. Магнитное поле многовитковых обмоток приводит во вращение внутреннюю и внешнюю оболочки, которые направлены в разные стороны, в зависимости от полярности магнитных систем внешних и внутренних оболочек или направления движения тока в проводниках многовитковых обмоток.
При проведении научно-исследовательских работ на действующем макете были выявлены следующие закономерности. В зависимости от массы внешней и внутренней оболочек макета, промежуточный слой Белашова 62 тоже начинает вращение, при этом направление вращения промежуточного слоя зависит от массы внутренней или внешней оболочки макета.
Необходимо особо подчеркнуть, что макет механизма вращения планет Солнечной системы работает от одной внутренней магнитной системы или одной внешней магнитной системы. В ранее указанных заявках подробно изложены поэтапные механизмы образования планет Солнечной системы из горячего материального тела, расположенного в пространстве:
- механизм остывания материального тела, находящегося в пространстве,
- механизм образования и получения термоэлектричества в сфере материального тела, находящегося в пространстве,
- механизм образования и получения магнитного поля в сфере материального тела, находящегося в пространстве,
- механизм образования магнитных полюсов в сфере материального тела, находящегося в пространстве,
- механизм запуска и начала вращения магнитной системы в сфере материального тела, находящегося в пространстве, против часовой стрелки на примере планеты Земля,
- механизм размещения планет Солнечной системы, имеющих магнитное поле, в одной плоскости космического пространства,
- механизм автономного вращения магнитной системы в сфере материального тела, находящегося в пространстве, против часовой стрелки на примере планеты Земля,
- механизм образования землетрясений в сфере материального тела, находящегося в пространстве, на примере планеты Земля,
- механизм образования вулканической деятельности в сфере материального тела, находящегося в пространстве, на примере планеты Земля,
- механизм образования геопатогенных зон в сфере материального тела, находящегося в пространстве, на примере планеты Земля,
- механизм образования цунами в сфере материального тела, находящегося в пространстве, на примере планеты Земля,
- механизм образования торнадо в сфере материального тела, находящегося в пространстве, на примере планеты Земля,
- механизм запуска и начала вращения магнитной системы в сфере материального тела, находящейся в пространстве, по часовой стрелке, на примере планеты Венера,
- механизм автономного вращения магнитной системы в сфере материального тела, находящейся в пространстве, по часовой стрелке, на примере планеты Венера,
- механизм вращения планет и Галактик по эллиптической орбите. Эти явления материального мира, которые происходили на планетах нашей системы, полностью доказаны по существующим законам физики и подтверждены новыми законами Белашова.
На базе работы первого в мире действующего макета механизма вращения планет Солнечной системы была изобретена и изготовлена модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01 у которой множество многовитковых обмоток дискового диэлектрического ротора, не меняя направление тока в проводниках, проходят сквозь один или множество постоянных подковообразных магнитов. Магниты полюсов системы возбуждения статора каждого ряда могут иметь разное направление движения магнитных потоков.
Модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01, как и механизм автономного вращения планет Солнечной системы нашей Галактики, может одновременно одной обмоткой индуктировать эдс, а другой при помощи выработанной эдс производить вращение магнитных систем.
Модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01, имеющая систему возбуждения статора, состоящую из постоянных магнитов, работает от источника постоянного тока следующим образом.
При подаче постоянного напряжения на соединительную клемму 30 положительный сигнал постоянного тока через токопроводящую подпружиненную щетку 27, токосъемное кольцо 22, проводник 45, контакт 44 и проводник 43 поступает на множество многовитковых обмоток первого ряда 16 и множество многовитковых обмоток второго ряда 17, которые могут иметь параллельное, последовательное или смешанное соединение проводников. Далее положительный сигнал постоянного тока через множество многовитковых обмоток первого ряда 16, проводник 46, контакт 47 и проводник 48 поступает на множество контактных пластин 49 и через токопроводящую подпружиненную щетку 26 выходит на соединительную клемму 31. При нахождении рабочих частей обмоток 33 множества многовитковых обмоток первого ряда 16 в рабочих секторах 32, где расположены первая магнитная система статора левого основания корпуса 5, имеющая магнит северного полюса 10, и вторая магнитная система правого основания корпуса 7, имеющая магнит южного полюса 14, по правилу левой руки многовитковые обмотки первого ряда 16 начинают перемещаться по часовой стрелке 55. На фиг.3 изображен график постоянного тока первого ряда множества многовитковых обмоток модульно-дисковой универсальной электрической машины. Далее положительный сигнал постоянного тока через множество многовитковых обмоток второго ряда 17, проводник 50, контакт 51, проводник 52 поступает на множество контактных пластин 53 и через токопроводящую подпружиненную щетку 26 выходит на соединительную клемму 31. При нахождении рабочих частей обмоток 37 множества многовитковых обмоток второго ряда 17 в рабочих секторах 32, где расположены первая магнитная система статора левого основания корпуса 5, имеющая магнит южного полюса 11, и вторая магнитная система правого основания корпуса 7, имеющая магнит северного полюса 13, по правилу левой руки многовитковые обмотки второго ряда 17 начинают перемещаться по часовой стрелке 55. На фиг.4 изображен график постоянного тока второго ряда множества многовитковых обмоток модульно-дисковой универсальной электрической машины. Правило левой руки гласит, если взять левую руку и расположить ее в магнитном поле так, чтобы магнитные силовые линии входили в ладонь, и направить вытянутые четыре пальца по направлению тока, то отогнутый большой палец укажет направление силы, действующей на проводник. Для вращения дискового диэлектрического ротора по часовой стрелке 55 направление движения тока в множестве многовитковых обмоток первого ряда 16 должно быть против часовой стрелки 56, а направление движения тока в множестве многовитковых обмоток второго ряда 17 должно быть по часовой стрелке 57. На фиг.5 изображен график постоянного тока первого и второго рядов четного или нечетного количества многовитковых обмоток модульно-дисковой универсальной электрической машины, которые соединены последовательно. Рабочие части многовитковых обмоток первого ряда 33 и рабочие части многовитковых обмоток второго ряда 37 расположены в чередующейся последовательности каждого рабочего сектора 32. На фиг.6 изображен график постоянного тока первого и второго рядов четного или нечетного количества многовитковых обмоток модульно-дисковой универсальной электрической машины, которые соединены параллельно. Рабочие части многовитковых обмоток первого ряда 33 и рабочие части многовитковых обмоток второго ряда 37 расположены в одном рабочем секторе 32, но в чередующейся последовательности. Быстросъемный коллектор 20 при помощи контактных пластин 49 и контактных пластин 53 объединяет выходной сигнал постоянного тока четного или нечетного количества многовитковых обмоток первого ряда 16 и выходной сигнал постоянного тока четного или нечетного количества многовитковых обмоток второго ряда 17 в одну составляющую. Причем вход и выход четного или нечетного количества многовитковых обмоток первого ряда 16 и четного или нечетного количества многовитковых обмоток второго ряда 17 через первую магнитную систему статора левого основания корпуса 5 и вторую магнитную систему статора правого основания корпуса 7 будет происходить беспрепятственно из любого положения ротора. Максимальное количество первых магнитных систем статора левого основания корпуса 5 и вторых магнитных систем статора правого основания корпуса 7 должно быть в два раза меньше количества рабочих секторов 32.
Модульно-дисковые универсальные электрические машины Белашова с диэлектрическим (диамагнитным) ротором обладают большим преимуществом перед электрическими машинами, у которых ротор выполнен из ферромагнитного материала, тем, что:
- имеют хорошее охлаждение,
- имеют модульную конструкцию,
- имеют высокую степень надежности,
- имеют надежное сопротивление изоляции,
- имеют небольшие габариты и небольшой вес,
- имеют прямоугольный сигнал импульсного напряжения и тока,
- могут легко регулироваться по току и напряжению,
- могут иметь систему слежения и регулирования, которая способна автоматически изменять параметры электрической машины,
- могут иметь порог чувствительности менее одного Вольта,
- могут вращаться со скоростью меньше одного оборота в минуту,
- могут быть изготовлены от нескольких Вт до сотен кВт,
- могут работать в воде или других агрессивных жидкостях в незащищенном виде,
- диэлектрический ротор не имеет потерь на гистерезис,
- диэлектрический ротор не имеет потерь на вихревые токи,
- диэлектрический ротор не имеет потерь на реактивное сопротивление якоря.
Для реверсивного вращения модульно-дисковой универсальной электрической машины от источника постоянного тока необходимо изменить направление движения тока в четном или нечетном количестве многовитковых обмоток первого ряда 16 и четном или нечетном количестве многовитковых обмоток второго ряда 17 диэлектрического ротора 15.
Модульно-дисковая универсальная электрическая машина Белашова МДУЭМБ-01, имеющая систему возбуждения статора, состоящую из электромагнитов, работает от источника переменного тока следующим образом.
Все магнитные системы модульно-дисковой универсальной электрической машины должны быть выполнены на электромагнитах, тогда при изменении полярности на четном или нечетном количестве многовитковых обмоткок первого ряда 16 и четном или нечетном количестве многовитковых обмоток второго ряда 17 и всех магнитных системах статора левого основания корпуса 5 и правого основания корпуса 7 модульно-дисковая универсальная электрическая машина будет работать от сети переменного тока любой частоты.
Ротор модульно-дисковой универсальной электрической машины Белашова МДУЭМБ-01, имеющий два ряда многовитковых обмоток, может при помощи первого ряда многовитковых обмоток вращаться от источника постоянного тока, а при помощи второго ряда многовитковых обмоток выдавать эдс постоянного тока, причем затраченная работа на вращение диэлектрического ротора в магнитном поле будет всегда больше чем выработанная эдс постоянного тока.
Раньше не было электрических машин, у которых амплитуда и форма сигнала постоянного тока множества многовитковых обмоток ротора не меняла своих характеристик за время прохождения их через магнитное поле одной или множества магнитных систем статора, поэтому не было необходимости применять на практике законы и математические формулы Белашова. Сейчас, после изобретения МДУЭМБ-01, нужно будет делать полный перерасчет кпд всех выпускаемых электрических машин.
В роторе модульно-дисковой универсальной электрической машине МДУЭМБ-01 нет стальных магнитопроводов, как у первой в мире электрической машины ЭМПТБ-01. Электрические машины со стальным магнитопроводом ротора не могут конкурировать с электрическими машинами, имеющими диэлектрический ротор.
Сверхскоростные и низкооборотные модульно-дисковые универсальные электрические машины Белашова МДУЭМБ-01 не имеют индуктивного сопротивления многовитковых обмоток ротора на любой частоте.
Краткие технические характеристики макета МДУЭМБ-01:
- масса ротора МДУЭМБ-01 = 200 г,
- диаметр дискового ротора МДУЭМБ-01 = 175 мм,
- количество рабочих рядов многовитковых обмоток - 1,
- порог чувствительности электрической машины, при котором происходит начальное вращение ротора, меньше 1 В,
- при 1,5 В количество оборотов электрической машины достигает 108 об/мин,
- при 12,8 В количество оборотов электрической машины достигает 1400 об/мин.
Макет выполнен в открытом исполнении и наглядно показывает, что движение тока в многовитковых обмотках происходит в одном направлении.
Модульно-дисковая универсальная электрическая машина имеет большой кпд, так как все многовитковые обмотки ротора работают одновременно по всему диаметру от сигнала постоянного или переменного тока. Магнитные системы электрической машины могут быть расположены на статоре или роторе, могут быть изготовлены из постоянных магнитов, электромагнитов или их сочетанием. Электрическая машина хорошо регулируется по напряжению и по току. Согласно первому закону Белашова в области формирования и измерения электрических сигналов постоянного тока, который гласит, что максимальная форма сигнала постоянного тока в замкнутой цепи прямо пропорциональна максимальной геометрической форме сигнала постоянного тока, у которого амплитуда сигнала не меняет свои характеристики во времени, всегда выше, чем у электрических машин обмотки, которые работают по сигналу переменного тока или третьего закона Белашова. Согласно третьему закону Белашова, в области формирования и измерения электрических сигналов переменного тока, эффективное значение разнообразных форм сигнала переменного тока в замкнутой цепи прямо пропорционально геометрической форме сигнала переменного тока и обратно пропорционально времени его прохождения. См. законы и формулы Белашова в патенте Российской Федерации №2175807, которые поясняют, почему универсальные электрические машины Белашова отличаются от обычных электрических машин постоянного или переменного тока.
Изобретение позволяет создать в энергетике, промышленности и народном хозяйстве новые типы электрических машин постоянного или переменного тока, а также пересмотреть законы и математические формулы в электротехнике, которые определяют кпд электрических машин, технических сооружений и других электромеханических устройств и механизмов.
Источники инфориации
1. Книга "Единицы физических величин и их размерность", автор Л.А.Сена, издательство Наука. Главная редакция физико-математической литературы, г. Москва, 1988 год.
2. Книга "Физика, справочные материалы", автор О.Ф.Кабардин, издательство Просвещение, г. Москва, 1988 год.
3. Книга "Электротехника с основами промышленной электроники", авторы В.Е.Китаев и Л.С.Шляпинтох, издательство Высшая школа, г. Москва, 1973 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНО-ЦИЛИНДРИЧЕСКАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2008 |
|
RU2368994C1 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2007 |
|
RU2320065C1 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1998 |
|
RU2130682C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2096898C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2000 |
|
RU2175807C2 |
| МОДУЛЬНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2009 |
|
RU2394339C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2118036C1 |
| УНИВЕРСАЛЬНАЯ ТЕРМОЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2009 |
|
RU2414041C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2000 |
|
RU2218651C2 |
| МОДУЛЬНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА БЕЛАШОВА | 2010 |
|
RU2435982C1 |


Изобретение относится к области электротехники и касается особенностей конструктивного выполнения первой в мире модульно-дисковой универсальной электрической машины, у которой множество многовитковых обмоток четного или нечетного количества рядов проходят сквозь однородное магнитное поле одного или множества магнитных систем статора, без каких-либо изменений напряжения и тока, где амплитуда сигнала постоянного тока не меняет своих характеристик во времени. Изобретение предназначено для использования в качестве низкооборотного генератора постоянного или переменного тока, сверхскоростной электрической машины постоянного тока, двигателя переменного тока или развернутого линейного двигателя постоянного или переменного тока. Сущность изобретения заключается в том, что модульно-дисковая универсальная электрическая машина содержит левое и правое основания корпуса, где размещено четное или нечетное количество рядов магнитных систем возбуждения статора, расположенных через равномерные промежутки и взаимодействующих между собой противоположными полюсами. Магнитные системы возбуждения статора могут быть изготовлены из постоянных магнитов, электромагнитов и их сочетанием. Внутри модуля размещена подвижная жесткость с дисковым диэлектрическим ротором, съемным валом и средством фиксации вала. Дисковый диэлектрический ротор выполнен из четного или нечетного количества рядов, состоящих из множества многовитковых обмоток, которые через разъемное соединение электрически связаны с контактными пластинами и токосъемным кольцом быстросъемного составного коллектора. Множество многовитковых обмоток четного или нечетного количества рядов могут иметь параллельное, последовательное или смешанное соединение проводников. Рабочая часть множества многовитковых обмоток каждого ряда должна соответствовать высоте каждого магнита южного и магнита северного полюса. Дисковый диэлектрический ротор закреплен на подвижной жесткости и разделен на множество секторов, которые расположены через равномерные промежутки, а внутри каждого сектора множество многовитковых обмоток имеют рабочие и нерабочие части обмоток. Щеточный механизм, имеющий токопроводящие подпружиненные щетки, взаимодействует с быстросъемным составным коллектором, устройством передачи электрической энергии и юстировочным устройством, включающим систему автоматического регулирования и управления. Для точного вхождения множества многовитковых обмоток в каждый рабочий сектор рабочие контактные пластины механически связаны с токопроводящей подпружиненной щеткой, юстировочным устройством и системой автоматического регулирования и управления, а нерабочие контактные пластины быстросъемного коллектора должны соответствовать ширине токопроводящей подпружиненной щетки. Технический результат - повышение кпд, надежности, технологичности, безопасности, а также уменьшение веса и себестоимости, упрощение технологии изготовления и ремонта модульно-цилиндрической универсальной электрической машины. 6 з.п. ф-лы, 9 ил.
1. Модульно-дисковая универсальная электрическая машина, содержащая статор с магнитной системой возбуждения, включающей магнитопроводы, магниты северного и южного полюса, ротор с многовитковыми обмотками, выполненный из парамагнитного или диамагнитного материала, составной коллектор с контактными пластинами, щеткодержатель со щетками, систему автоматического слежения и регулирования, а также элементы качения или скольжения, через которые статор взаимодействует с валом ротора, отличающаяся тем, что содержит съемный модуль, состоящий из левого и правого основания корпуса, имеющего съемный вал, средство фиксации съемного вала, устройство крепления модулей, подвижную жесткость с дисковым диэлектрическим ротором, имеющего четное или нечетное количество рядов, состоящих из множества многовитковых обмоток, которые через разъемное соединение электрически связаны с контактными пластинами, и токосъемным кольцом быстросъемного составного коллектора, щеточным механизмом, имеющим токопроводящие подпружиненные щетки, устройством передачи электрической энергии, юстировочным устройством и системой автоматического регулирования и управления, взаимодействующих с внутренней частью левого и правого основания корпуса, где размещено четное или нечетное количество рядов магнитных систем возбуждения статора, расположенных через равномерные промежутки и взаимодействующих между собой противоположными полюсами, где на левом и правом внешнем основании подвижной жесткости размещены элементы качения или скольжения, которые связаны с левым и правым основанием корпуса, а внутреннее основание подвижной жесткости взаимодействует со съемным валом через средство фиксации съемного вала, где дисковый диэлектрический ротор, закрепленный на подвижной жесткости, разделен на множество секторов, которые расположены через равномерные промежутки, а внутри каждого сектора множество многовитковых обмоток имеют рабочую и не рабочие части обмоток, где множество многовитковых обмоток четного или нечетного количества рядов могут иметь параллельное, последовательное или смешанное соединение проводников, где четное или нечетное количество рядов магнитных систем возбуждения статора могут быть изготовлены из постоянных магнитов, электромагнитов и их сочетанием, причем модульно-дисковая универсальная электрическая машина может быть выполнена в виде отдельного модуля, состоящего из низкооборотного генератора постоянного или переменного тока, сверхскоростной электрической машины постоянного тока, двигателя переменного тока или развернутого линейного двигателя постоянного или переменного тока, у которой множество многовитковых обмоток четного или нечетного количества рядов проходят сквозь однородное магнитное поле одного или множества магнитных систем статора, без каких-либо изменений напряжения и тока, где амплитуда сигнала постоянного тока не меняет своих характеристик во времени.
2. Модульно-дисковая универсальная электрическая машина по п.1, отличающаяся тем, что для точного вхождения четного или нечетного количества многовитковых обмоток в каждый рабочий сектор не рабочие контактные пластины быстросъемного коллектора должны соответствовать ширине токопроводящей подпружиненной щетки.
3. Модульно-дисковая универсальная электрическая машина по п.1, отличающаяся тем, что для точного вхождения четного или нечетного количества многовитковых обмоток в каждый рабочий сектор, юстировочное устройство и система автоматического регулирования и управления механически и электрически связана с токопроводящей подпружиненной щеткой.
4. Модульно-дисковая универсальная электрическая машина по п.1, отличающаяся тем, что рабочая часть четного или нечетного количества многовитковых обмоток должна соответствовать высоте каждого магнита южного или северного полюса.
5. Модульно-дисковая универсальная электрическая машина по п.1, отличающаяся тем, что диэлектрический ротор выполнен в виде цилиндра.
6. Модульно-дисковая универсальная электрическая машина по п.1, отличающаяся тем, что в цепи быстросъемного составного коллектора используется электронный коммутатор.
7. Модульно-дисковая универсальная электрическая машина по п.1, отличающаяся тем, что сектора ротора изолированы друг от друга и имеют систему теплообмена.
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2000 |
|
RU2175807C2 |
| RU 2073296 C1, 10.02.1997 | |||
| RU 2005140396 A, 10.07.2007 | |||
| RU 2005129781 A, 10.04.2007 | |||
| Электромаховичный двигатель Белашова | 1990 |
|
SU1831751A3 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2118036C1 |
| ГЕНЕРАТОР БЕЛАШОВА | 1991 |
|
RU2025871C1 |
| US 6459179 A, 01.10.2002 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ ПОДВАРКИ | 2009 |
|
RU2398404C1 |

