ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системам связи «точка - много точек». Более конкретно настоящее изобретение относится к способу и устройству для оптимизации частоты регистрации, а также области поискового вызова в беспроводной сети групповой связи.
УРОВЕНЬ ТЕХНИКИ
В системах радиосвязи регистрация является процессом, с помощью которого подвижная станция уведомляет базовую станцию о своем местоположении, состоянии, идентификации, цикле временных интервалов и других характеристиках. Подвижная станция сообщает базовой станции свое местоположение и состояние так, чтобы базовая станция могла эффективно вызывать подвижную станцию, когда устанавливают прерванный мобильной станцией вызов. С другой стороны, поисковый вызов подвижной станции включает в себя поиск подвижной станции, когда вызов должен быть осуществлен к этой подвижной станции. Чтобы сохранить пропускную способность системы, уменьшить стоимость услуги и продлить срок службы аккумулятора, желательно минимизировать количество регистраций, а также загрузку канала поискового вызова. Однако минимизация количества регистраций может сопровождаться значительным увеличением области поискового вызова и, следовательно, увеличением загрузки канала поискового вызова. Существующие методики регистрации и поискового вызова не оптимизированы на основе мобильности подвижных станций.
Например, класс беспроводных услуг связи, предназначенных для быстрой эффективной «один к одному» или «один ко многим» (групповой) связи, существует в различных формах много лет. В общем случае эти услуги являются полудуплексными, когда пользователь нажимает кнопку «нажми, чтобы говорить» (НЧГ) на телефоне/радиостанции, чтобы инициировать групповой вызов. Когда ему предоставили слово, абонент затем в общем случае говорит в течение нескольких секунд. После того, как абонент отпускает кнопку НЧГ, другие пользователи могут просить слово. Эти услуги традиционно используются в таких применениях, когда один человек, «диспетчер», должен осуществлять связь с группой людей, такими как обслуживающий персонал или таксисты, откуда происходит название «диспетчеризация» для данной услуги. Подобные услуги предлагают в Интернете, и они известны как «голосовой разговор». Главная особенность этих услуг то, что подвижные станции, участвующие в групповом вызове, в общем случае имеют низкую мобильность. Поэтому регистрация и поисковый вызов, соответственно, могут быть оптимизированы.
Поэтому существует потребность в механизме минимизации регистрации без необходимости осуществлять поисковый вызов в более широкой области. Также существует потребность в оптимизации количества регистраций и поисковых вызовов группы подвижных станций, основываясь на мобильности подвижных станций.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Раскрытые варианты осуществления обеспечивают новые и улучшенные способ и устройство для оптимизации регистрации и поискового вызова подвижных станций в сети радиосвязи. В одном из аспектов способ в подвижной станции (ПС) для регистрации ПС на базовой станции (БС) заключается в том, что определяют количество ячеек, идентифицированных в первом списке, и регистрируют ПС на БС, если количество идентифицированных в первом списке ячеек равно заданному пределу.
В одном из аспектов способ поискового вызова целевой подвижной станции (ПС) заключается в том, что принимают информацию, предназначенную для целевой ПС, и выполняют поисковый вызов целевой ПС в области поискового вызова, которая имеет центр в ячейке, в которой целевая ПС зарегистрировалась последний раз и которую расширяют на заданное количество ячеек вокруг данной ячейки.
В другом аспекте устройство для поискового вызова целевой подвижной станции (ПС) включает в себя запоминающее устройство, приемник, передатчик и процессор, который с возможностью обмена информацией соединен с запоминающим устройством, приемником и передатчиком. Процессор выполнен с возможностью осуществления команд для выполнения указанных выше способов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества настоящего изобретения станут более очевидными из подробного описания вариантов осуществления в связи с чертежами, приведенными ниже:
фиг.1 показывает систему групповой связи;
фиг.2 показывает вариант осуществления базовой станции и подвижной станции, показанных на фиг.1;
фиг.3 показывает, как несколько подвижных станций взаимодействуют с сервером группового вызова;
фиг.4 показывает вариант осуществления сервера группового вызова на фиг.1;
фиг.5 показывает процесс установления вызова;
фиг.6 подробно показывает обмен сигналами при вызове для инициированного сетью процесса доставки информации;
фиг.7 показывает процесс буферизации информации о местоположении подвижных станций;
фиг.8 показывает конфигурацию для сети групповой связи;
фиг.9 показывает альтернативную конфигурацию для сети групповой связи;
фиг.10 показывает инициированный сетью процесс доставки информации;
фиг.11 показывает процесс регистрации;
фиг.12 показывает размещение ячеек; и
фиг.13 показывает процесс поискового вызова.
ПОДРОБНОЕ ОПИСАНИЕ
Прежде, чем несколько вариантов осуществления будут подробно объяснены, следует понимать, что объем изобретения не должен ограничиваться деталями конструкции и расположением компонентов, которые сформулированы в последующем описании или показаны на чертежах. Кроме того, следует понимать, что используемые фразеология и терминология предназначены для описания, и их не следует рассматривать в качестве ограничения.
Фиг.1 показывает функциональную структурную схему системы 100 групповой связи для воплощения одного из вариантов осуществления. Система 100 групповой связи также известна как система «нажми, чтобы говорить» (НЧГ, PTT), сетевая широковещательная служба (СШС, NBS), система диспетчеризации или система связи «точка - много точек». В одном из вариантов осуществления система 100 групповой связи включает в себя сервер 102 группового вызова, который может иметь или централизованное, или региональное размещение.
Группа подвижных станций (ПС) 104 и 106, в качестве которых могут использоваться телефоны стандарта cdma2000, например, могут запрашивать сеанс передачи пакетных данных, используя опцию передачи данных. Каждая ПС может использовать сеанс связи для регистрации ее адреса Интернет протокола (IP) на сервере 102 группового вызова для выполнения инициирования группового вызова. В одном из вариантов осуществления сервер 102 группового вызова связан с узлами обслуживания пакетных данных (УОПД) 114 поставщика услуг связи через сеть 116 поставщика услуг связи. Подвижные станции 104 и 106 после запроса сеанса передачи пакетных данных от беспроводной инфраструктуры могут иметь возможность IP связи с сервером 102 группового вызова через УОПД 114. Каждый УОПД может осуществлять связь с контроллером базовой станции (КБС) через функциональный блок управления пакетами (ФБУП) 108 и сеть 112. ФБУП может быть совмещен с КБС в пределах базовой станции (БС) 110. Множество КБС может быть связано с контроллером подвижных станций (КПС) 118.
Узел обслуживания пакетных данных может находиться в одном из нескольких состояний, например в активном состоянии или в состоянии связи, в состоянии бездействия и в состоянии сброса или в неактивном состоянии. В активном состоянии, или в состоянии связи, между участвующими в соединении ПС и БС или КБС существует активный канал трафика, и любая сторона может отправлять данные. В состоянии бездействия между участвующими в соединении ПС и КБС не существует активного канала трафика, но канал связи протокола двухточечного соединения (ПДС, PPP) поддерживают между участвующими в соединении ПС и УОПД. В состоянии сброса или в неактивном состоянии между участвующими в соединении ПС и КБС не существует активного канала трафика, и канал связи протокола PPP не поддерживают между участвующими в соединении ПС и УОПД.
После включения подвижные станции 104 и 106 могут запрашивать сеанс передачи пакетных данных. Как часть установления сеанса передачи пакетных данных, каждой ПС может назначаться IP-адрес. Каждая ПС может выполнять процесс регистрации для уведомления сервера 102 группового вызова о IP-адресе ПС. Регистрация может выполняться с использованием IP-протокола, такого как протокол инициации сеанса связи (SIP) по протоколу пользовательских дейтаграмм (UDP). IP-адрес ПС может использоваться для связи с ПС, когда соответствующий пользователь приглашен в групповой вызов.
Когда групповой вызов установлен, подвижные станции 104 и 106 и сервер 102 группового вызова могут обмениваться сообщениями сигнализации и информацией. В одном из вариантов осуществления участвующие в групповой связи подвижные станции и сервер группового вызова могут обмениваться информацией, используя протокол реального времени (RTP) по UDP. Они также могут обмениваться сообщениями сигнализации, используя протокол сигнализации по UDP.
Система 100 групповой связи выполняет несколько различных функций для обеспечения услуги группового вызова. Функции, которые относятся к пользовательской стороне, включают в себя регистрацию пользователя, инициирование группового вызова, завершение группового вызова, передачу предупреждения участникам группы, которые позднее присоединились к групповому вызову, разрешение конфликтов абонентов, добавление членов (участников) к группе, удаление членов из группы, лишение регистрации членов и аутентификацию устройства и/или пользователя. Функции, которые относятся к подготовке и работе системы, включают в себя администрирование и подготовку к работе, масштабируемость и надежность. Эти функции описаны подробно в одновременно поданной патентной заявке № 10/076,726, зарегистрированной 14 февраля 2002, которая переуступлена тому же самому представителю и которая представлена в своей полноте для справки.
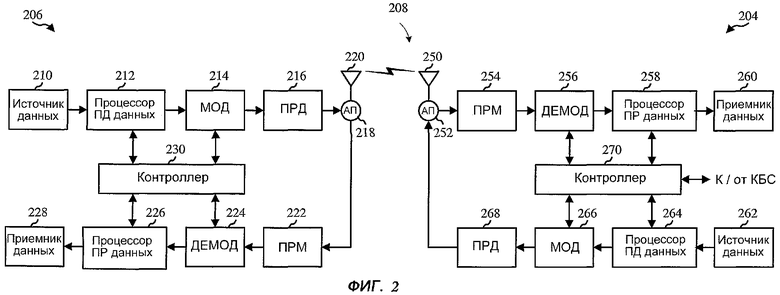
Фиг.2 - упрощенная структурная схема варианта осуществления базовой станции 204 и подвижной станции 206, которые способны воплощать различные раскрытые варианты осуществления. Для конкретной системы связи базовая станция 204 и подвижная станция 206 могут обмениваться между собой речевой информацией, пакетными данными и/или сообщениями через воздушный интерфейс 208. Могут передаваться различные типы сообщений, например сообщения, используемые для установления сеанса связи между базовой станцией и подвижной станцией, сообщения регистрации и поискового вызова и сообщения, используемые для управления передачей данных (например, управление мощностью, информация скорости передачи данных, подтверждение и т.д.). Некоторые из этих типов сообщений описаны более подробно ниже.
Для обратного канала связи в подвижной станции 206 голосовые и/или пакетные данные (например, из источника 210 данных) и сообщения (например, из контроллера 230) обеспечивают к процессору 212 передачи (ПД) данных, который форматирует и кодирует данные и сообщения с помощью одной или большего количества схем кодирования для генерации кодированных данных. Каждая схема кодирования может включать в себя любую комбинацию кодирования с помощью циклического избыточного кода (CRC), сверточного, турбо, блочного и другого кодирования, или кодирование может совсем отсутствовать. Речевая информация, пакетные данные и сообщения могут кодироваться, используя различные схемы, и различные типы сообщений могут кодироваться по-разному.
Кодированные данные затем обеспечивают на модулятор (МОД) 214 и их дополнительно обрабатывают (например, кодируют, расширяют спектр с помощью коротких псевдошумовых (ПШ) последовательностей и скремблируют с помощью длинной ПШ последовательности, назначенной пользовательскому терминалу). Модулированные данные затем обеспечивают к модулю передатчика (ПРД) 216 и приводят к определенному виду (например, преобразуют в один или большее количество аналоговых сигналов, усиливают, фильтруют и квадратурно модулируют) для генерации сигнала обратного канала связи. Сигнал обратного канала связи направляют через антенный переключатель (АП) 218 и передают через антенну 220 к базовой станции 204.
В базовой станции 204 обратный канал связи принимают с помощью антенны 250, направляют через антенный переключатель 252 и обеспечивают его передачу к модулю приемника (ПРМ) 254. Базовая станция 204 может принимать от подвижной станции 206 регистрационную информацию и информацию состояния, например коэффициент мобильности подвижной станции. Модуль приемника 254 приводит к определенному виду (например, фильтрует, усиливает, преобразует с понижением частоты и переводит в цифровую форму) принятый сигнал и обеспечивает выборки. Демодулятор (ДЕМОД) 256 принимает и обрабатывает (например, расширяет спектр, декодирует и демодулирует с помощью пилот-сигнала) выборки для обеспечения восстановленных символов. Демодулятор 256 может воплощать многоотводный приемник (рейк-приемник), который обрабатывает многочисленные экземпляры принятого сигнала и генерирует объединенные символы. Процессор 258 приема (ПР) данных затем декодирует символы для восстановления данных и сообщений, переданных в обратном канале связи. Восстановленные голосовые/пакетные данные обеспечивают к приемнику данных 260, а восстановленные сообщения могут обеспечиваться к контроллеру 270. Контроллер 270 может включать в себя команды для определения области поискового вызова, поискового вызова группы подвижных станций и передачи информации к подвижным станциям. Обработка с помощью демодулятора 256 и процессора 258 ПР данных является обратной по отношению к обработке, выполняемой в подвижной станции 206. Демодулятор 256 и процессор 258 ПР данных могут дополнительно выполнять обработку многочисленных передач, принятых через многочисленные каналы, например через обратный основной канал (R-FCH) и обратный дополнительный канал (R-SCH). Кроме того, передачи могут происходить одновременно от многочисленных подвижных станций, каждая из которых может передавать в обратном основном канале, обратном дополнительном канале или в них обоих.
В прямом канале связи в базовой станции 204 голос и/или пакетные данные (например, из источника данных 262) и сообщения (например, из контроллера 270) обрабатывают (например, форматируют и кодируют) с помощью процессора 264 ПД данных, дополнительно обрабатывают (например, кодируют и расширяют спектр) с помощью модулятора (МОД) 266 и приводят к определенному виду (например, преобразуют в аналоговые сигналы, усиливают, фильтруют и квадратурно модулируют) с помощью модуля передатчика (ПРД) 268 для генерации сигнала прямого канала связи. Сигнал прямого канала связи направляют через антенный переключатель 252 и передают через антенну 250 к подвижной станции 206. Сигналы прямого канала связи включают в себя сигналы поискового вызова.
В подвижной станции 206 сигналы прямого канала связи принимают с помощью антенны 220, направляют через антенный переключатель 218 и обеспечивают к модулю приемника 222. Модуль приемника 222 приводит к определенному виду (например, преобразует с понижением частоты, фильтрует, усиливает, квадратурно модулирует и переводит в цифровую форму) принятый сигнал и обеспечивает выборки. Выборки обрабатывают (например, расширяют спектр, декодируют и демодулируют с помощью пилот-сигнала) с помощью демодулятора 224 для обеспечения символов и символы дополнительно обрабатывают (например, декодируют и проверяют) с помощью процессора 226 ПР данных для восстановления данных и сообщений, переданных в прямом канале связи. Восстановленные данные обеспечивают к приемнику данных 228, и восстановленные сообщения могут обеспечиваться к контроллеру 230. Контроллер 230 может включать в себя команды для определения количества пилот-сигналов в активном наборе, добавления новых пилот-сигналов в активный набор, перемещения пилот-сигналов из одного списка в другой список, регистрации подвижной станции 206 и обеспечения передачи регистрационной информации к базовой станции 204.
Услуга группового вызова (УГВ, GCS) может предоставлять возможность одному пользователю разговаривать с группой пользователей в полудуплексном или дуплексном режиме. В первом случае из-за того, что только одному человеку можно разрешить говорить в определенный момент времени, разрешением говорить можно управлять с помощью инфраструктуры. В таких системах пользователь может запрашивать разрешение говорить, например, с помощью нажатия на кнопку «нажми, чтобы говорить» (НЧГ). Система может принимать решения по запросам, принятым от многочисленных пользователей, и через процесс разрешения конфликтов согласно заданному алгоритму система может выбирать одного из запрашивающих. Затем система может уведомлять выбранного пользователя, что ему предоставлена возможность говорить. Система может прозрачно диспетчеризировать информацию трафика пользователя, такую как голос и/или данные, от абонента, которому предоставлена возможность говорить, к остальным членам группы, которых можно считать «слушающими абонентами». Голосовой трафик и/или трафик данных в GCS могут отличаться от классического телефонного вызова «один к одному», и на некоторые разговоры может быть установлен приоритет.
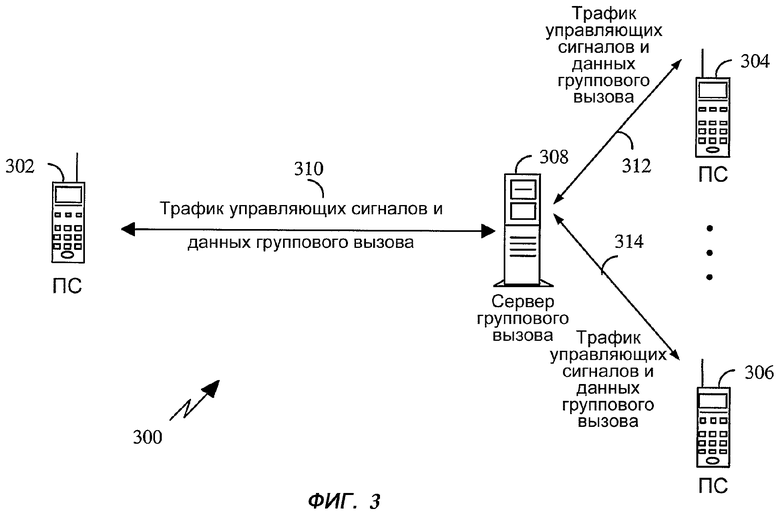
Фиг.3 показывает конфигурацию группового вызова для того, чтобы показать, как подвижные станции (ПС) 302, 304 и 306 взаимодействуют с сервером 308 группового вызова. Множество серверов группового вызова могут развертываться, когда это желательно для крупномасштабных групп. На фиг.3, когда ПС 302 имеет разрешение передавать информацию другим членам группы, ПС 302 является абонентом, которому предоставлено слово, и он может передавать информацию по установленному каналу. Когда ПС 302 определяется как абонент, которому предоставили слово, остальные участники ПС 304 и ПС 306 могут не иметь разрешения передавать информацию группе. Соответственно, ПС 304 и ПС 306 определяются как слушающие абоненты. Как описано выше, ПС 302, 304 и 306 связаны с сервером 308 группового вызова, используя по меньшей мере один канал. В одном из вариантов осуществления каналы 310, 312 и 314 могут включать в себя канал протокола инициирования сеанса связи (SIP), канал сигнализации и канал трафика данных.
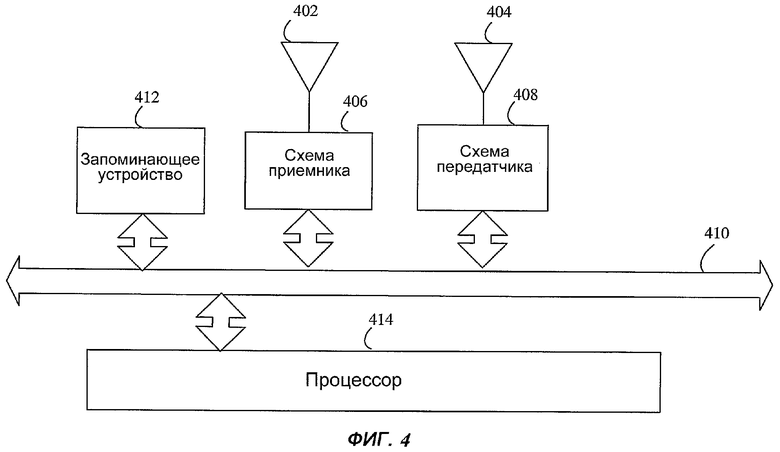
Фиг.4 показывает один из вариантов осуществления сервера 102 группового вызова, работающего в системе, показанной на фиг.1. Сервер группового вызова включает в себя антенны 402, 404 для передачи и приема данных. Антенна 402 соединена со схемой 406 приемника, и антенна 404 соединена с передающей схемой 408. Коммуникационная шина 410 обеспечивает обычное соединение между собой других модулей, показанных на фиг.4. Коммуникационная шина 410 дополнительно связана с запоминающим устройством 412. Запоминающее устройство 412 хранит считываемые компьютером команды для разнообразных операций и функций, выполняемых сервером группового вызова. Процессор 414 выполняет команды, хранящиеся в запоминающем устройстве 412.
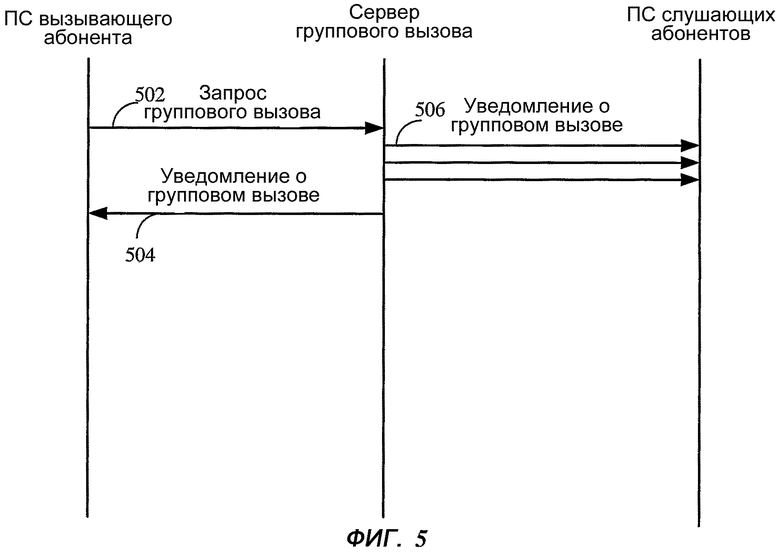
Фиг.5 показывает схему последовательности обмена сообщениями, которая показывает осуществление группового вызова согласно одному из вариантов осуществления. Пользователь, который хочет инициировать групповой вызов, выбирает одного или большее количество целевых пользователей, одну или большее количество заданных групп или их комбинацию и может нажать кнопку «нажми, чтобы говорить» (НЧГ) на ПС. ПС вызывающего абонента может находиться в состоянии бездействия сеанса передачи пакетных данных, когда вызывающий абонент инициирует групповой вызов. ПС вызывающего абонента затем посылает запрос 502 группового вызова к серверу группового вызова для установки группового вызова. Запрос группового вызова может передаваться независимо от того, имеет ли ПС вызывающего абонента выделенный канал трафика или нет. После того, как посылают запрос группового вызова, если ПС вызывающего абонента находится в состоянии бездействия сеанса передачи пакетных данных, ПС вызывающего абонента инициирует процесс повторного установления выделенного канала трафика и готовит сеанс передачи пакетных данных к передаче информации.
Когда сервер группового вызова принимает запрос группового вызова, сервер группового вызова разворачивает заданные группы, если хотя бы одна определена в принятом запросе группового вызова, в список членов группы. Сервер группового вызова извлекает информацию местоположения для требуемых членов группы. Сервер группового вызова также определяет, не работает ли уже в системе данная целевая группа.
После того, как сервер группового вызова определяет местоположение по меньшей мере одного из членов группы, сервер группового вызова посылает уведомление 504 назад к ПС вызывающего абонента, указывая, что групповой вызов устанавливается. В этом месте ПС вызывающего абонента, по оптимистичным прогнозам, удовлетворяет запрос вызывающего абонента на голосовую передачу. ПС вызывающего абонента начинает буферизовать принятую информацию для будущей передачи на сервер группового вызова. Сервер группового вызова использует информацию о местоположении подвижных станций целевых слушающих абонентов для передачи уведомлений 506 к подвижным станциям целевых слушателей. Передача уведомлений запускает сеансы передачи пакетных данных подвижных станций целевых слушателей, чтобы они вышли из состояния бездействия и вновь установили свои каналы трафика.
«Мгновенный ответ» относится ко времени ответа, которое требуется серверу группового вызова, чтобы ответить на НЧГ или запрос группового вызова. Цель ответа на НЧГ или запрос группового вызова состоит в том, чтобы соответствующим образом ответить на запрос в пределах заданного периода времени, например, в течение одной секунды или меньшего количества времени. Во многих случаях, когда вызывающий абонент просит установить групповой вызов, вызывающий абонент находится в состоянии бездействия сеанса передачи пакетных данных, подразумевая, что выделенного канала трафика не существует. Восстановление выделенных каналов трафика может занимать некоторое время.
В одном из вариантов осуществления система 100 групповой связи (фиг.1) поддерживает и модель «комната для дискуссий», и специальную модель для услуг группового вызова. В модели «комната для дискуссий» предварительно определены группы, которые могут храниться на сервере группового вызова. Заданные группы, или сети, могут быть открытыми, подразумевая, что группа имеет открытый список членов. В этом случае каждый член группы - потенциальный участник группового вызова. Групповой вызов начинают, когда первый член группы начинает инициировать групповой вызов. Вызов выполняется в течение заданного периода времени, который может конфигурироваться поставщиком услуг связи. Во время группового вызова конкретных членов группы могут просить присоединиться или покинуть разговор. В течение периодов отсутствия разговора групповой вызов может переводиться в состояние бездействия группы, пока кто-нибудь из членов группы не запросит разрешение говорить. Работая в модели «комната для дискуссий», члены группы, также известные как члены сети, осуществляют связь друг с другом, используя подвижные станции, назначенные каждому члену сети. Термин «сеть» обозначает группу членов, которым разрешено осуществлять связь друг с другом.
В специальной модели услуги группового вызова, однако, группы могут определяться в реальном времени и иметь закрытый список членов группы, связанный с каждой группой. Закрытый список членов группы может определять, каким членам группы разрешают участвовать в групповом вызове. Список членов группы может быть недоступен для других абонентов, которые не входят в закрытый список членов группы, и он может существовать только во время существования вызова. Описание специальной группы не может храниться в сервере группового вызова. Описание может использоваться для установления группового вызова и удаляться после того, как вызов закончился. Специальная группа может формироваться, когда вызывающий абонент выбирает одного или большее количество целевых членов и генерирует запрос группового вызова, который посылают серверу группового вызова, чтобы запустить вызов. Сервер группового вызова может посылать уведомление целевым членам группы, что они были включены в состав группы. Сервер группового вызова может автоматически присоединять целевых членов группы к групповому вызову, т.е. никаких действий может не требоваться от целевых членов группы. Когда специальный вызов становится неактивным, сервер групповой связи может «разорвать» вызов и освободить ресурсы, назначенные группе, которые включают в себя описание группы, используемое для начала вызова.
Сообщения сигнализации исходящего от сети вызова
В одном из вариантов осуществления после приема запроса на разговор сервер группового вызова может отправлять сообщения сигнализации передачи информации к группе находящихся в состоянии бездействия целевых подвижных станций и запускать установку выделенных каналов трафика находящихся в состоянии бездействия целевых подвижных станций. В одном из вариантов осуществления функциональный блок управления пакетами (ФБУП) принимает небольшое количество информации, например пакетные данные, от узла обслуживания пакетных данных (УОПД), которые могут быть предназначены для находящейся в состоянии бездействия целевой ПС. ФБУП может посылать данную информацию контроллеру базовой станции (КБС) в специальной форме. В одном из вариантов осуществления специальная форма включает в себя формат короткого пакета данных (SDB), как определено в TIA/EIA/IS-707-A-2 «Data Service Option Standard for Spread Spectrum Systems», приложение 2, опубликованном в июне 2000 (IS-707-A-2). Стандарт TIA/EIA/IS-2001-A, «Interoperability Specification (IOS) for cdma2000 Access Network Interfaces», опубликованный в августе 2001 (IS-2001-A), определяет несколько возможностей для КБС доставлять сообщения SDB целевым подвижным станциям.
Согласно стандарту IS-2001-A, например, когда небольшое количество данных, предназначенных для находящейся в состоянии бездействия целевой ПС, принято в ФБУП, ФБУП может посылать принятые данные к КБС в формате SDB. Если КБС решает, что короткие пакеты данных могут использоваться для доставки данных к находящейся в состоянии бездействия целевой ПС, то КБС может посылать данные непосредственно к находящейся в состоянии бездействия целевой ПС по каналу сигнализации. КБС может также посылать данные к КПС для доставки к находящейся в состоянии бездействия целевой ПС через процедуру вызова с помощью службы доставки прикладных данных (СДПД, ADDS). Данные можно доставлять к КПС, используя процедуру запрос обслуживания/ответ КБС. Если КБС не сумел доставить данные SDB к находящейся в состоянии бездействия целевой ПС самостоятельно, то КБС может посылать данные к КПС для доставки к находящейся в состоянии бездействия целевой ПС через процедуру вызова ADDS.
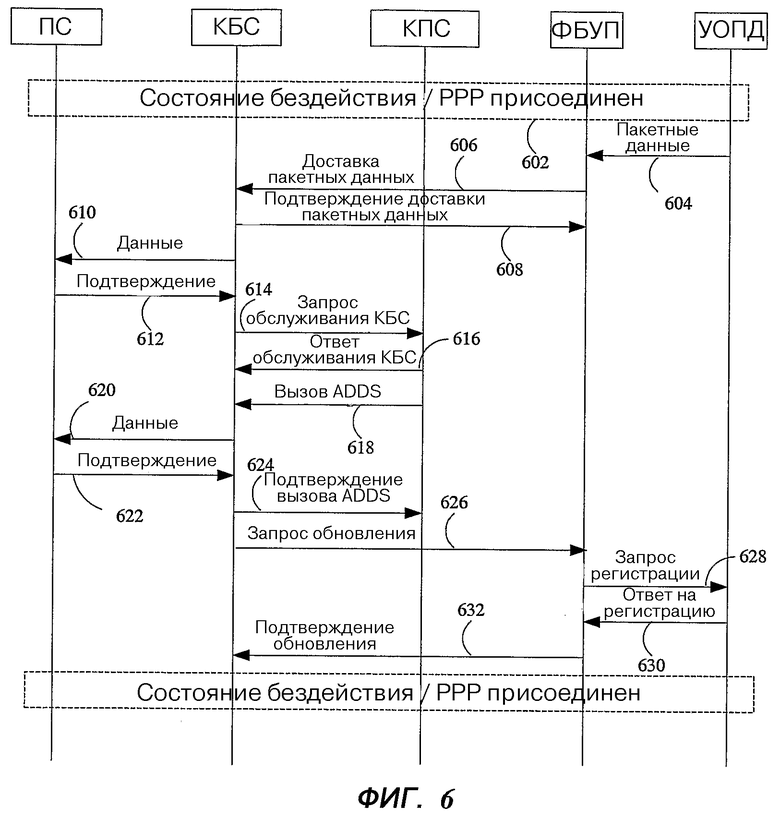
Фиг.6 показывает последовательность операций процедуры вызова для доставки данных к целевой ПС согласно одному из вариантов осуществления. Сеанс передачи пакетных данных находится в состоянии бездействия 602 с присоединенным PPP. УОПД посылает пакетные данные 604 к ФБУП на существующем соединении PPP, связанном с целевой ПС. ФБУП посылает пакетные данные 606 к КБС. ФБУП также буферизует пакетные данные. КБС подтверждает прием пакетов данных от ФБУП, возвращая сообщение 608 подтверждения, которое включает в себя указание, что КБС пытается послать данные целевой ПС. ФБУП затем удаляет данные, которые он буферизировал.
КБС посылает пакетные данные непосредственно целевой ПС или, альтернативно, КБС использует процедуру вызова ADDS для доставки к целевой ПС пакетных данных, например, в форме SDB. Если КБС непосредственно посылает пакетные данные 610 к целевой ПС, то целевая ПС посылает подтверждение 612 в ответ на прием данных. Если подтверждение не принято от целевой ПС, то КБС может решить не посылать пакетные данные или может запросить КПС доставить пакетные данные через процедуру вызова ADDS.
Если КБС не может успешно послать пакетные данные 610 к целевой ПС, то КБС посылает к КПС «запрос обслуживания КБС» 614, который содержит пакетные данные. КПС подтверждает прием сообщения запроса на обслуживание КБС, посылая «ответ обслуживания КБС» 616 к КБС. КПС затем посылает сообщение 618 вызова ADDS к КБС для доставки пакетных данных к целевой ПС. Если КПС посылает пакетные данные, то КПС определяет «поле типа данных» для вызова ADDS как «SDB». Сообщение вызова ADDS содержит информацию о местоположении целевой ПС. Соответственно, КБС направляет данные 620, например в форме SDB, к целевой ПС. Целевая ПС посылает сообщение 622 подтверждения после приема данных от КБС. Если КПС установил запрос в сообщении вызова ADDS, то КБС возвращает сообщение 624 подтверждения вызова ADDS к КПС после приема сообщения подтверждения от целевой ПС. КБС также посылает к ФБУП сообщение 626 обновления для указания успешной передачи данных к целевой ПС. ФБУП отвечает 628 КБС сообщением подтверждения обновления. ФБУП посылает запрос 630 на регистрацию к УОПД, который отвечает сообщением 632 ответа на регистрацию.
То, что КБС непосредственно доставляет пакетные данные к целевой ПС, может минимизировать задержку, но целевая ПС может не принимать данные из-за того, что целевая ПС, возможно, вышла из области поискового вызова КБС к тому времени, когда данные прибывают. Так как КПС поддерживает информацию о местоположении целевой ПС, процесс доставки данных с помощью вызова ADDS гарантирует, что целевая ПС принимает данные. В одном из вариантов осуществления КБС может кэшировать информацию о местоположении целевой ПС, которая может использоваться КБС, когда существуют данные, предназначенные целевой ПС. Использование информации о местоположении, кэшируемой в КБС, устраняет задержку из-за того, что КБС просит КПС послать вызов ADDS. Этот процесс обеспечивает уверенную доставку данных к целевой ПС на основании сохраненной информации о местоположении.
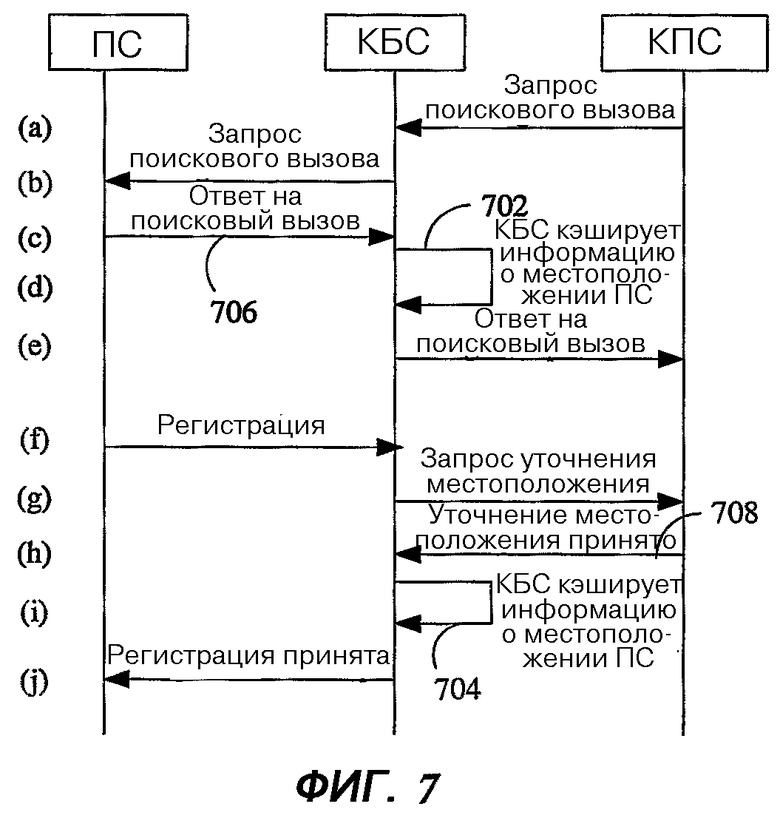
На фиг.7 показан вариант осуществления кэширования информации о местоположении подвижных станций. КБС кэширует 702, 704 информацию о местоположении целевой ПС после того, как КБС принимает от целевой ПС ответ 706 на поисковый вызов или принимает от КПС сообщение 708 «уточнение местоположения принято». Сообщение ответа на поисковый вызов, принятое от целевой ПС, может включать в себя поле идентификатора ячейки, которое определяет местоположение, например код зоны расположения (LAC) ячейки целевой ПС. В одном из вариантов осуществления КБС может получать информацию о местоположении целевой ПС из сообщения регистрации целевой ПС. Например, существует несколько различных видов регистрации, определенных с помощью стандарта TIA/EIA/IS-2000.5-A, «Upper Layer (Layer 3) Signaling Standard for cdma2000 Spread Spectrum Systems», датированный ноябрем 2000 (стандарт IS-2000). Любой из этих видов регистрации может обеспечивать информацию КБС о местоположении целевой ПС. КБС может обновлять кэшируемую информацию о местоположении, если КБС принимает ответ на поисковый вызов, ответ на регистрацию, исходящее сообщение или другие сообщения сигнализации, которые обеспечивают текущую информацию о местоположении целевой ПС.
Конфигурации сети
Каждый ФБУП в сети может однозначно определяться с помощью кода идентификации системы/идентификации сети/идентификации пакетной зоны (SID/NID/PZID). Когда целевая ПС перемещается от одного ФБУП к другому ФБУП, т.е. происходит передача обслуживания от одного ФБУП к другому ФБУП во время состояния бездействия сеанса передачи пакетных данных, целевая ПС может быть обязана повторно зарегистрироваться, чтобы УОПД установил связь с новым ФБУП и закончил существующее соединение со старым ФБУП.
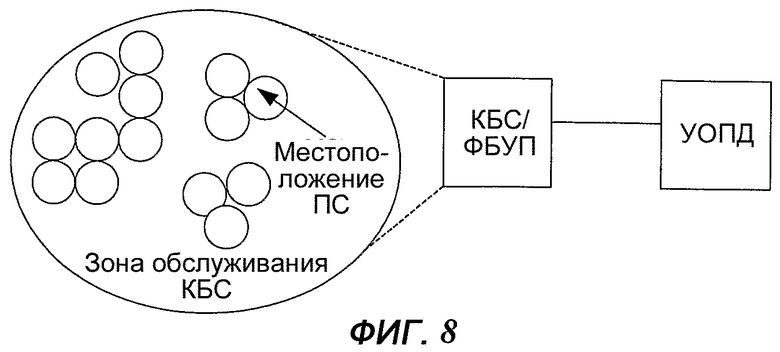
В одном из вариантов осуществления, как показано на фиг. 8, КБС и ФБУП совмещены. Когда пакетные данные достигают ФБУП и ФБУП собирается посылать пакетные данные, то наиболее вероятно, что целевая ПС находится в зоне обслуживания того же самого КБС. Иначе, целевая ПС будет обязана повторно зарегистрироваться, и новое соединение будет установлено с другим ФБУП.
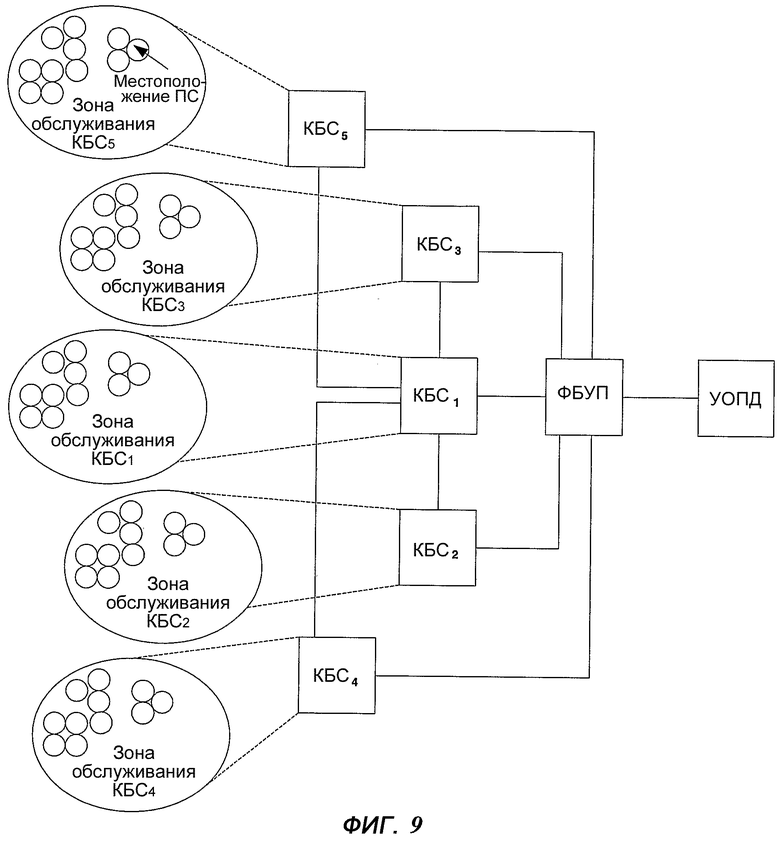
В одном из вариантов осуществления, который показан на фиг.9, КБС и ФБУП не совмещены. На фиг. 9 показан КБС1, который связан со всеми остальными КБС, которые связаны с тем же самым ФБУП. КБС, которые связаны с тем же самым ФБУП, могут быть связаны или через двухточечный канал связи, или через коммутируемую сеть. В отличие от сценария, когда КБС и ФБУП совмещены, когда ФБУП отправляет данные к КБС1, КБС1 может не суметь доставить данные к целевой ПС, потому что целевая ПС, возможно, вышла из зоны обслуживания КБС1 в зону обслуживания другого КБС. На фиг.9, например, целевая ПС, возможно, находилась в зоне обслуживания КБС1 до того, как сеанс передачи пакетных данных перешел в состояние бездействия, и, возможно, переместилась в зону обслуживания КБС5, когда КБС1 принимает запрос от ФБУП, чтобы доставить данные целевой ПС.
В одном из вариантов осуществления, когда ФБУП может быть совмещен с КБС, КБС принимает пакетные данные для передачи к целевой ПС, которая может находиться в состоянии бездействия. КБС может передавать пакетные данные к ячейкам и/или секторам в пределах зоны обслуживания КБС. Альтернативно, чтобы уменьшить потребление ресурсов воздушного канала связи, КБС может использовать информацию о местоположении целевой ПС, которая может уже находиться в КБС, для передачи данных к поднабору из ячеек и/или секторов под управлением КБС.
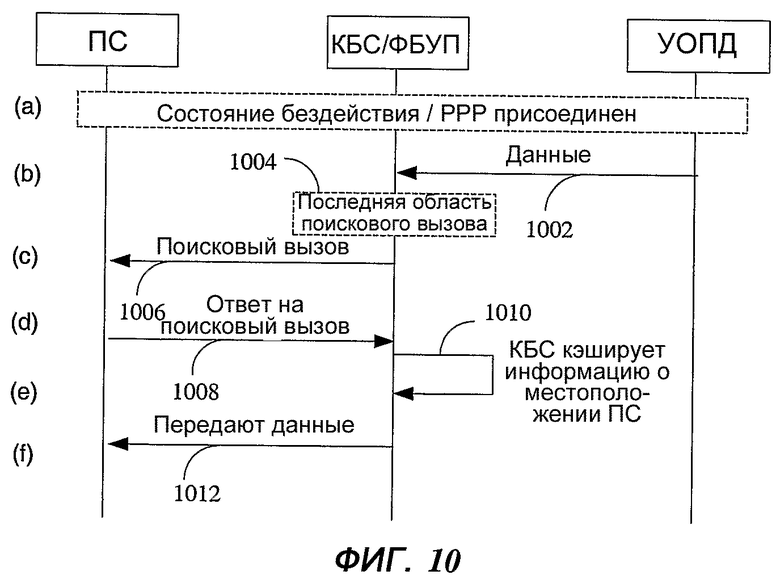
В одном из вариантов осуществления, когда ФБУП может быть совмещен с КБС, как показано на фиг. 10, КБС принимает пакетные данные 1002 от УОПД для доставки к целевой ПС. Прежде, чем КБС посылает пакетные данные 1002 к целевой ПС, КБС сначала буферизирует пакетные данные. КБС затем определяет 1004 зону поискового вызова для вызова целевой ПС, как будет описано более подробно позднее. КБС затем посылает сообщение 1006 поискового вызова, основанное на определенной зоне поискового вызова в зоне обслуживания КБС. Если идентифицирующая информация целевой ПС, такая как соответствующий идентифицирующий номер мобильного телефона (MIN) или электронный заводской (серийный) номер (ESN), соответствует идентифицирующей информации, определенной в сообщении поискового вызова, то ПС посылает к КБС ответ на поисковый вызов 1008. Ответ на поисковый вызов обеспечивает информацию о ячейке и/или секторе, в которых расположена целевая ПС, что позволяет КБС посылать пакетные данные только идентифицированной ячейке и/или сектору. КБС кэширует 1010 информацию о местоположении целевой ПС перед посылкой пакетных данных 1012 к целевой ПС. Кэшируемая информация о местоположении может обновляться с помощью следующего ответа на поисковый вызов, ответа на регистрацию, исходящего сообщения или других сообщений сигнализации, которые обеспечивают информацию о местоположении целевой ПС. Актуальность кэшируемой информации о местоположении может определяться с помощью таймера.
Схема регистрации на основе ячейки
Регистрация - процесс, с помощью которого ПС уведомляет базовую станцию о своем местоположении, состоянии, идентификации, цикле временных интервалов и других характеристиках. ПС информирует базовую станцию о своем местоположении и состоянии так, чтобы базовая станция могла эффективно вызывать ПС, устанавливая законченный ПС вызов. Хотя ПС находится в состоянии ожидания, ПС может выполнять регистрацию, когда происходит передача обслуживания в состоянии ожидания. Передача обслуживания в состоянии ожидания происходит, когда ПС перемещается из зоны покрытия одной базовой станции в зону покрытия другой базовой станции, находясь в состоянии ожидания. Если ПС обнаруживает сигнал пилотного канала от другой базовой станции, который значительно сильнее, чем пилот-сигнал текущей базовой станции, то ПС определяет, что должна произойти передача обслуживания в состоянии ожидания.
Передача обслуживания в состоянии ожидания - передача приема канала поискового вызова, канала управления широковещания или прямого канала общего управления от одной базовой станции к другой базовой станции, когда ПС находится в состоянии ожидания. ПС в состоянии ожидания определяет, что необходима передача обслуживания в состоянии ожидания, если уровень пилот-сигнала новой ячейки на определенное количество децибел больше пилот-сигнала в ее активном наборе.
Когда ПС переходит из других состояний в состояние ожидания, ПС может инициализировать два списка ячеек. Первый список называют списком CURRENT_CELL_LIST (списком текущих ячеек), и второй список называют списком PREV_CELL_LIST (списком предыдущих ячеек). Когда ПС выполняет передачу обслуживания в состоянии «не занято», подвижная станция добавляет идентифицирующую информацию новой ячейки в список CURRENT_CELL_LIST, если новая ячейка еще не идентифицирована в данном списке. ПС может получить информацию о новой ячейке, слушая передаваемые служебные сообщения.
В одном из вариантов осуществления, если количество ячеек в списке CURRENT_CELL_LIST достигает заданного предела, например, MAX_NUM_CELLS (максимального количества ячеек), то ПС выполняет регистрацию и копирует содержимое списка CURRENT_CELL_LIST, кроме последнего содержимого, в список PREV_CELL_LIST. Таким образом, размер списка PREV_CELL_LIST равен заданному пределу, например, значению MAX_NUM_CELLS минус один.
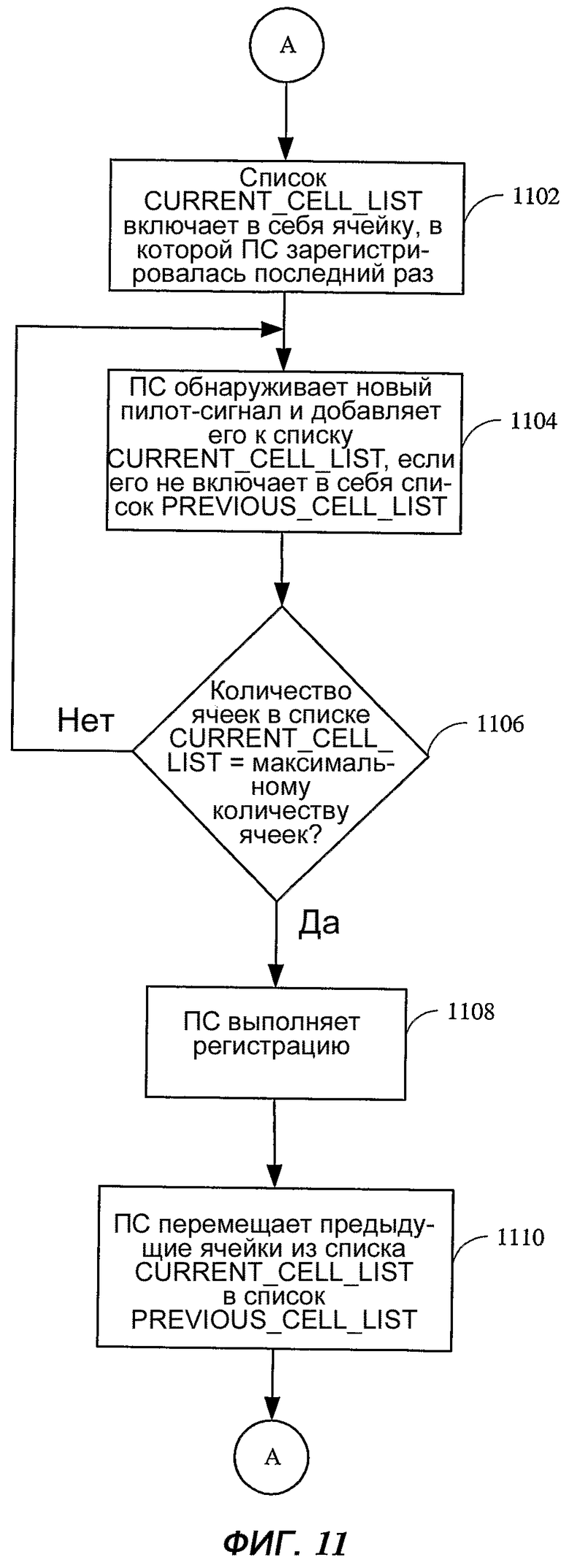
Фиг.11 показывает процесс регистрации согласно одному из вариантов осуществления. Список CURRENT_CELL_LIST включает в себя по меньшей мере идентифицирующую информацию ячейки, в которой ПС зарегистрировалась последний раз, 1102. Когда ПС обнаруживает новый пилот-сигнал, который может быть добавлен к активному набору, на этапе 1104 ПС добавляет идентифицирующую информацию новой ячейки в список CURRENT_CELL_LIST, если ячейка еще не идентифицирована в списке CURRENT_CELL_LIST. На этапе 1106 ПС определяет, достигло ли количество идентифицированных в списке CURRENT_CELL_LIST ячеек заданного предела, например, MAX_NUM_CELLS. Если количество ячеек в списке CURRENT_CELL_LIST достигло заданного предела, то на этапе 1108 ПС выполняет регистрацию и на этапе 1110 перемещает идентифицирующую информацию ячеек, кроме последней введенной ячейки, в которой ПС зарегистрировалась, из списка CURRENT_CELL_LIST в список PREV_CELL_LIST.
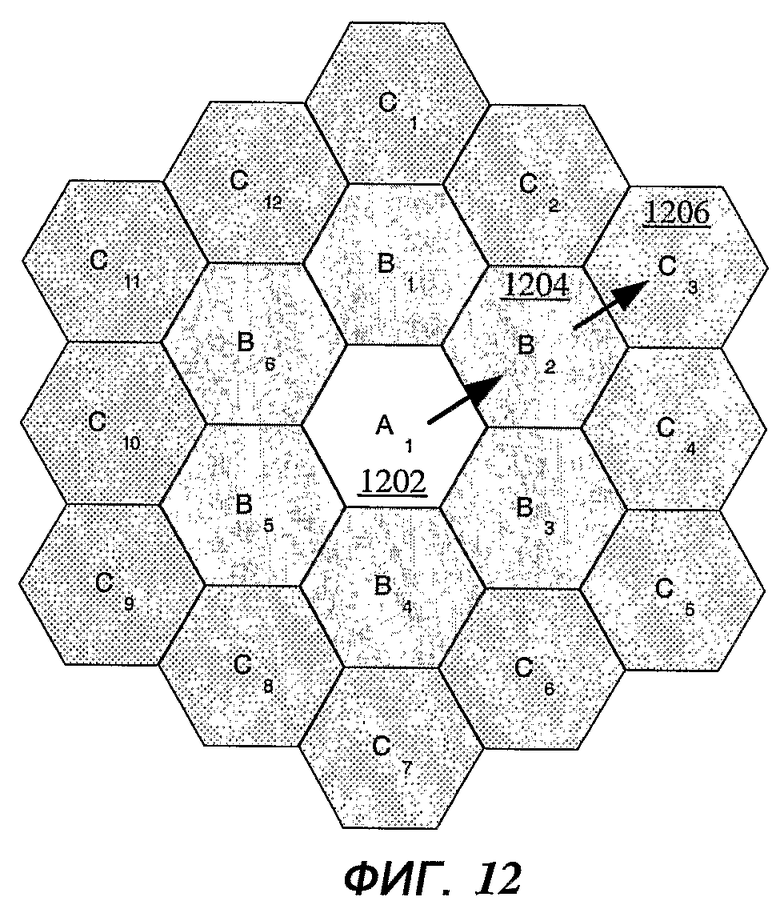
Размещение ячеек в одном из вариантов осуществления показано на фиг. 12. Предполагая, что заданный предел MAX_NUM_CELLS равен трем и траектория ПС от ячейки к ячейке определяется следующим обозначением A1 -> B2 -> C3, и предполагая, что ячейка, в которой мобильный телефон зарегистрировался последний раз, является ячейкой A1, 1202, список CURRENT_CELL_LIST содержит ячейку {А1}. После того, как ПС обнаруживает пилот-сигнал ячейки B2, 1204, и добавляет ячейку B2 в список CURRENT_CELL_LIST, последний содержит ячейки {А1, B2}. Когда ПС перемещается в ячейку C3, 1206, ПС обнаруживает и добавляет ячейку C3 в список CURRENT_CELL_LIST, который теперь содержит ячейки {А1, B2, C3}. Теперь, так как количество ячеек, идентифицированных в списке CURRENT_CELL_LIST, равняется заданному пределу, например трем, ПС выполняет регистрацию в сети и перемещает ячейки {А1, B2} из списка CURRENT_CELL_LIST в список PREVIOUS_CELL_LIST.
Поисковый вызов подвижной станции включает в себя поиск подвижной станции, когда должен быть осуществлен вызов этой подвижной станции. Чтобы сохранить пропускную способность системы, уменьшить стоимость услуги и продлить срок службы аккумулятора, желательно минимизировать область поискового вызова, чтобы уменьшить загрузку канала поискового вызова. Область поискового вызова может конфигурироваться, например, предварительно определяться или динамически определяться для заданного КБС. Область поискового вызова может быть различной для различных КБС. КБС вызывает целевую ПС в сконфигурированной области поискового вызова. Если местоположение целевой ПС не может быть определено в сконфигурированной области поискового вызова КБС, то данные можно послать соседнему КБС для доставки к целевой ПС. Поэтому каждый КБС не должен лишний раз выполнять поисковый вызов в большой области. Если местоположение целевой ПС не может быть определено в области поискового вызова КБС связанных с контроллером подвижных станций (КПС), то данные можно послать КПС для доставки к целевой ПС, если КПС может определить местоположение целевой ПС.
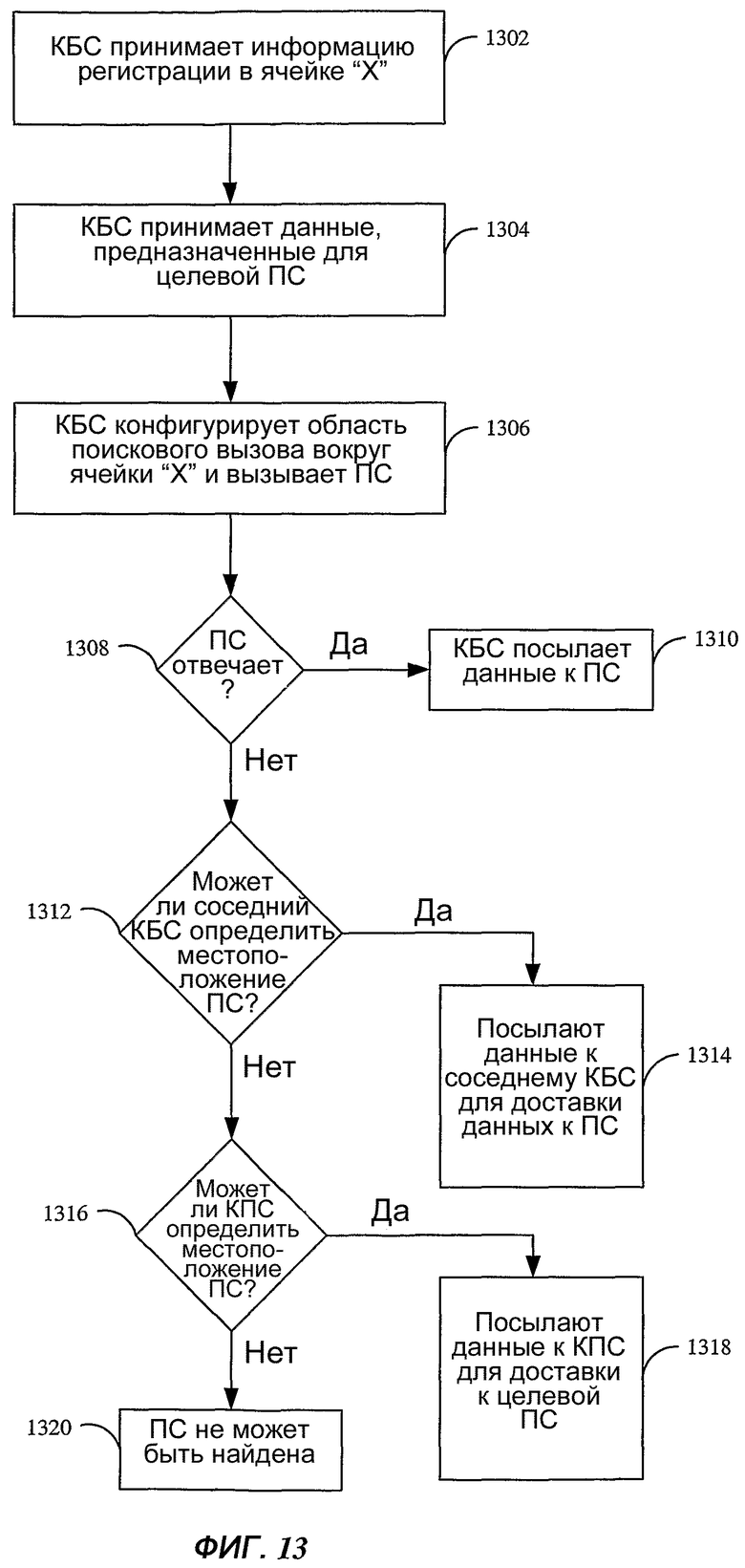
Фиг.13 показывает схему поискового вызова согласно одному из вариантов осуществления. На этапе 1302 КБС принимает регистрационную информацию от целевой ПС, которая расположена в ячейке X. Когда КБС принимает информацию, например, данные, голос, изображение, текст, видео или любую их комбинацию для доставки к целевой ПС, на этапе 1304 КБС выполняет поисковый вызов целевой ПС, основываясь на области поискового вызова, которая может быть предварительно определенной областью или динамически определенной областью. На этапе 1306 КБС конфигурирует область поискового вызова, основываясь на определенном количестве ячеек вокруг ячейки, в которой зарегистрировалась последний раз целевая ПС. Например, область поискового вызова может включать в себя ячейки, которые находятся в пределах области, которая имеет центр в ячейке X и которую расширяют на заданное количество ячеек, например, на MAX_NUM_CELLS минус один.
После того, как КБС вызывает целевую ПС, основываясь на сконфигурированной области поискового вызова, на этапе 1308 КБС ждет ответа на поисковый вызов от целевой ПС. Если КБС может определить местоположение целевой ПС из ответа на поисковый вызов, на этапе 1310 КБС посылает к целевой ПС информацию, предназначенную для целевой ПС. Однако если КБС не может определить местоположение целевой ПС из ответа на поисковый вызов, то КБС просит соседний КБС определить местоположение целевой ПС, что может происходить в соответствии с той же самой схемой поискового вызова, обсуждаемой выше. Если на этапе 1312 соседний КБС определяет местоположение целевой ПС, то на этапе 1314 КБС посылает информацию, предназначенную для целевой ПС, к соседнему КБС для доставки к целевой ПС.
Если ни один из КБС, связанных с КПС, не может определить местоположение целевой ПС, то КПС запрашивает определение местоположения целевой ПС, что может быть сделано, основываясь на схеме лавинного вызова. Если КПС определяет местоположение целевой ПС на этапе 1316, то на этапе 1318 КБС, которая содержит информацию, предназначенную для адресата, посылает информацию к КПС для доставки к целевой ПС. В случае если КПС не может определить местоположение целевой ПС, то ПС может быть не найдена из-за того, что она выключена или находится вне зоны обслуживания 1320.
Например, пусть траектория перемещения целевой ПС от ячейки к ячейке является следующей «A -> B -> C -> D -> E -> D -> C -> B -> F», заданный предел, т.е. MAX_NUM_CELLS равен трем, и предполагая, что ячейка, в которой ПС зарегистрировалась последний раз, является ячейкой A, список CURRENT_CELL_LIST содержит ячейку {A}. После того, как ПС обнаруживает и добавляет ячейку B в список CURRENT_CELL_LIST, последний содержит ячейки {A, B}. Когда ПС перемещается в ячейку C, ПС обнаруживает и добавляет ячейку C в список CURRENT_CELL_LIST, что приводит к тому, что он теперь содержит ячейки {A, B, C}. Так как количество ячеек в списке CURRENT_CELL_LIST равняется заданному пределу, например 3, ПС выполняет регистрацию в ячейке C и перемещает ячейки {A, B} из списка CURRENT_CELL_LIST в список PREVIOUS_CELL_LIST.
Когда ПС перемещается через ячейку D и затем в ячейку E, ПС добавляет ячейки D и E в список CURRENT_CELL_LIST, который теперь содержит ячейки {C, D, E}. Так как количество ячеек в списке CURRENT_CELL_LIST равняется заданному пределу, например трем, ПС выполняет регистрацию в ячейке E и перемещает ячейки {C, D} из списка CURRENT_CELL_LIST в список PREVIOUS_CELL_LIST.
Когда ПС возвращается в ячейку D и затем в C, ПС не добавляет ячейки D и C в список CURRENT_CELL_LIST, потому что существующий список PREVIOUS_CELL_LIST уже включает в себя эти ячейки. Однако когда ПС возвращается в ячейку B, ПС добавляет идентифицирующую информацию ячейки B в список CURRENT_CELL_LIST, потому что список PREVIOUS_CELL_LIST не включает в себя ячейку B, который теперь включает в себя ячейки C и D.
Когда ПС перемещается через новую ячейку F, ПС обнаруживает и добавляет ячейку F в список CURRENT_CELL_LIST, который теперь содержит ячейки {E, B, F}. Так как количество ячеек в списке CURRENT_CELL_LIST равняется заданному пределу три, т.е. MAX_NUM_CELLS, ПС выполняет регистрацию в ячейке F и перемещает ячейки {E, B} из списка CURRENT_CELL_LIST в список PREVIOUS_CELL_LIST.
В одном из вариантов осуществления, когда ФБУП не может быть совмещен с КБС, КБС принимает запрос от ФБУП, чтобы послать пакетные данные к целевой ПС. КБС определяет, кэшировал ли КБС информацию о местоположении целевой ПС. Если КБС кэшировал информацию о местоположении целевой ПС, что позволяет КБС выполнять уверенную доставку данных, то КБС посылает данные к целевой ПС согласно кэшированной информации о местоположении. Иначе, если КБС не имеет информации о местоположении целевой ПС, КБС может послать сообщение поискового вызова в заданную зону поискового вызова, чтобы определить местоположение целевой ПС. Если КБС может определить местоположение целевой ПС, то КБС тогда посылает к целевой ПС данные, принятые от ФБУП. Однако если КБС не может определить местоположение целевой ПС в заданной зоне поискового вызова, то КБС может послать данные соседнему КБС, который может быть связан с тем же самым КПС, так, чтобы один из соседних КБС, который имеет информацию о местоположении целевой ПС или может определить местоположение целевой ПС, передал информацию к целевой ПС. КБС, который кэшировал информацию о местоположении целевой ПС или может определить местоположение целевой ПС, доставляет данные к целевой ПС. Если ни один КБС не имеет информации о местоположении целевой ПС и не может определить местоположение целевой ПС, то данные можно послать КПС, чтобы они были доставлены целевой ПС, например, через лавинный поисковый вызов. КПС может не суметь определить местоположение целевой ПС из-за того, что целевая ПС выключена или находится вне зоны обслуживания. Поэтому раскрытые варианты осуществления обеспечивают существенное сокращение количества регистраций, а также области поискового вызова, таким образом продлевая срок службы аккумулятора и уменьшая загрузку канала поискового вызова.
Специалисты должны понять, что информация и сигналы могут быть представлены, используя любое разнообразие различных технологий и протоколов. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, на которые может существовать ссылка по всему приведенному выше описанию, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любой их комбинацией.
Специалисты дополнительно должны признать, что различные показанные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с раскрытыми вариантами осуществления, могут осуществляться как электронное оборудование, программное обеспечение или их комбинация. Чтобы ясно показать эту взаимозаменяемость оборудования и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы были описаны выше в общем случае с точки зрения их функциональных возможностей. Осуществлены ли такие функциональные возможности, как оборудование или как программное обеспечение, зависит от конкретного применения и конструктивных ограничений, налагаемых на всю систему. Специалисты могут осуществить описанные функциональные возможности различными способами для каждого конкретного применения, но такой выбор реализаций не должен интерпретироваться как отклонение от объема настоящего изобретения.
Различные показанные логические блоки, модули и схемы, описанные в связи с раскрытыми вариантами осуществления, могут осуществляться или воплощаться с помощью универсального процессора, процессора цифровой обработки сигналов (ПЦОС), специализированной интегральной схемы (СПИС), программируемой вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретной логической схемы или транзисторной логики, дискретных компонент оборудования или любой их комбинации, предназначенных для выполнения описанных функций. Универсальный процессор может быть микропроцессором, но, альтернативно, процессор может быть любым обычным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор может также воплощаться как комбинация вычислительных устройств, например комбинация ПЦОС и микропроцессора, множества микропроцессоров, одного или большего количества микропроцессоров вместе с ядром ПЦОС или любая другая такая конфигурация.
Этапы способа или алгоритма, описанного в связи с раскрытыми вариантами осуществления, могут быть реализованы непосредственно в оборудовании, в программном модуле, выполняемом процессором, или в их комбинации. Программный модуль может находиться в оперативной памяти, флэш-памяти, постоянном запоминающем устройстве (ПЗУ), стираемом программируемом постоянном запоминающем устройстве (СППЗУ), электрически стираемом программируемом постоянном запоминающем устройстве (ЭСППЗУ), в регистрах, на жестком диске, съемном диске, запоминающем устройстве MS-ROM или на любом носителе данных другой формы, известном из предшествующего уровня техники. Примерный носитель данных связан с процессором, так что процессор может считывать информацию с носителя данных и записывать информацию на него. Альтернативно носитель данных может быть неотъемлемой частью процессора. Процессор и носитель данных могут находиться в СПИС. СПИС могут находиться в пользовательском терминале. Альтернативно процессор и носитель данных могут находиться в пользовательском терминале как дискретные компоненты.
Описание раскрытых вариантов осуществления обеспечено для того, чтобы предоставить возможность любому специалисту изготавливать или применять настоящее изобретение. Различные модификации этих вариантов осуществления могут быть очевидны специалистам, и определенные общие принципы могут применяться к другим вариантам осуществления, например к службе передачи мгновенных сообщений или к любым приложениям беспроводной передачи данных, не отступая от объема или формы изобретения. Таким образом настоящее изобретение не ограничено показанными вариантами осуществления, но должно обеспечивать самый широкий объем вместе с раскрытыми принципами и новыми признаками.
Изобретение относится к технике связи. Технический результат заключается в оптимизации регистрации и поискового вызова в системе групповой связи. Технический результат достигается за счет использования мобильности подвижных станций для минимизации частоты регистрации, которые выполняются подвижными станциями, а также области поискового вызова подвижных станций. Когда подвижные станции имеют низкое состояние мобильности, то базовая станция уменьшает область поискового вызова подвижных станций так, чтобы загрузка канала поискового вызова была уменьшена. 8 н. и 24 з.п ф-лы, 13 ил.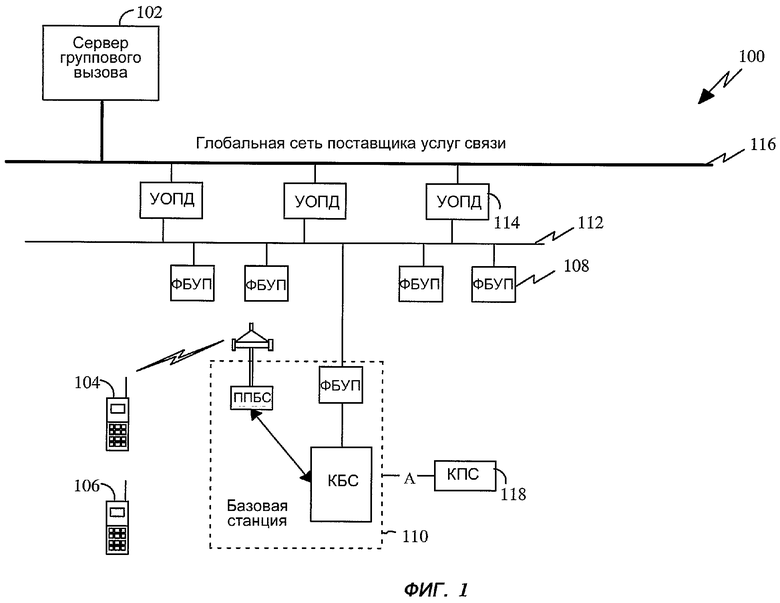
1. Способ регистрации подвижной станции (ПС) на базовой станции (БС), выполняемый на ПС, заключающийся в том, что
определяют количество ячеек, идентифицированных в первом списке, регистрируют ПС на БС, если количество идентифицированных в первом списке ячеек равно заданному пределу, и
перемещают ячейки, идентифицированные в первом списке, кроме ячейки, в которой ПС зарегистрировалась последний раз, во второй список после указанной регистрации ПС.
2. Способ по п.1, в котором дополнительно добавляют в первый список ячейку, уровень пилот-сигнала которой выше или равен заданному порогу, если данная ячейка уже не включена во второй список.
3. Устройство для регистрации подвижной станции (ПС) на базовой станции (БС), содержащее
средство для определения количества ячеек, идентифицированных в первом списке, и
средство для регистрации ПС на БС, если количество идентифицированных в первом списке ячеек равно заданному пределу, и средство для перемещения во второй список ячеек, идентифицированных в первом списке, кроме ячейки, в которой ПС зарегистрировалась последний раз, после указанной регистрации ПС.
4. Устройство по п.3, дополнительно содержащее средство для добавления в первый список ячейки, уровень пилот-сигнала которой выше или равен заданному порогу, если данная ячейка уже не включена во второй список.
5. Считываемый компьютером носитель информации, содержащий коды для предоставления возможности процессору выполнять способ регистрации подвижной станции (ПС) на базовой станции (БС), заключающийся в том, что
определяют количество ячеек, идентифицированных в первом списке, и
регистрируют ПС на БС, если количество идентифицированных в первом списке ячеек равно заданному пределу, и
перемещают ячейки, идентифицированные в первом списке, кроме ячейки, в которой ПС зарегистрировалась последний раз, во второй список после указанной регистрации ПС.
6. Считываемый компьютером носитель информации по п.5, причем способ дополнительно включает в себя этап, на котором добавляют в первый список ячейку, уровень пилот-сигнала которой выше или равен заданному порогу, если данная ячейка уже не включена во второй список.
7. Подвижная станция (ПС), содержащая
приемник, выполненный с возможностью приема информации от базовой станции (БС),
передатчик, выполненный с возможностью передачи информации в БС, и процессор, выполненный с возможностью выполнения регистрации ПС на БС путем
определения количества ячеек, идентифицированных в первом списке,
регистрирации ПС на БС, если количество идентифицированных в первом списке ячеек равно заданному пределу, и
перемещения во второй список ячеек, идентифицированных в первом списке, кроме ячейки, в которой ПС зарегистрировалась последний раз, после указанной регистрации ПС.
8. ПС по п.7, в которой процессор дополнительно выполнен с возможностью добавления в первый список ячейки, уровень пилот-сигнала которой выше или равен заданному порогу, если данная ячейка уже не включена во второй список.
9. Способ поискового вызова целевой подвижной станции (ПС), заключающийся в том, что
принимают информацию, предназначенную для целевой ПС, и
выполняют поисковый вызов целевой ПС в области поискового вызова, которая имеет центр в ячейке, в которой целевая ПС зарегистрировалась последний раз, и которую расширяют на заданное количество ячеек вокруг данной ячейки.
10. Способ по п.9, в котором дополнительно передают информацию в целевую ПС, если местоположение целевой ПС определено.
11. Способ по п.10, в котором дополнительно определяют соседний контроллер базовой станции (КБС), который может определить местоположение целевой ПС, если местоположение целевой ПС не определено.
12. Способ по п.11, в котором дополнительно передают информацию в соседний КБС, который определяет местоположение целевой ПС, для доставки в целевую ПС.
13. Способ по п.11, в котором дополнительно определяют, может ли контроллер подвижных станций (КПС) определить местоположение целевой ПС, если никакой КБС, связанный с КПС, не может определить местоположение целевой ПС.
14. Способ по п.13, в котором дополнительно передают информацию в КПС для доставки в целевую ПС, если КПС определяет местоположение целевой ПС.
15. Считываемый компьютером носитель информации, который хранит коды для предоставления возможности процессору выполнять способ поискового вызова целевой подвижной станции (ПС), заключающийся в том, что
принимают информацию, предназначенную для целевой ПС, и
выполняют поисковый вызов целевой ПС в области поискового вызова, которая имеет центр в ячейке, в которой целевая ПС зарегистрировалась последний раз, и которую расширяют на заданное количество ячеек вокруг данной ячейки.
16. Считываемый компьютером носитель информации по п.15, причем способ дополнительно включает в себя этап, на котором передают информацию в целевую ПС, если местоположение целевой ПС определено.
17. Считываемый компьютером носитель информации по п.16, причем способ дополнительно включает в себя этап, на котором определяют соседний контроллер базовой станции (КБС), который может определить местоположение целевой ПС, если местоположение целевой ПС не определено.
18. Считываемый компьютером носитель информации по п.17, причем способ дополнительно включает в себя этап, на котором передают информацию в соседний КБС, который определяет местоположение целевой ПС, для доставки в целевую ПС.
19. Считываемый компьютером носитель информации по п.17, причем способ дополнительно включает в себя этап, на котором определяют, может ли контроллер подвижных станций (КПС) определить местоположение целевой ПС, если никакой КБС, связанный с КПС, не может определить местоположение целевой ПС.
20. Считываемый компьютером носитель информации по п.19, причем способ дополнительно включает в себя этап, на котором передают информацию в КПС для доставки в целевую ПС, если КПС определяет местоположение целевой ПС.
21. Устройство для поискового вызова целевой подвижной станции (ПС), содержащее
средство для приема информации, предназначенной для целевой ПС, и
средство для поискового вызова целевой ПС в области поискового вызова, которая имеет центр в ячейке, в которой целевая ПС зарегистрировалась последний раз, и которую расширяют на заданное количество ячеек вокруг данной ячейки.
22. Устройство по п.21, дополнительно содержащее средство для передачи информации в целевую ПС, если местоположение целевой ПС определено.
23. Устройство по п.22, дополнительно содержащее средство для определения соседнего контроллера базовой станции (КБС), который может определить местоположение целевой ПС, если местоположение целевой ПС не определено.
24. Устройство по п.23, дополнительно содержащее средство для передачи информации в соседний КБС, который определяет местоположение целевой ПС, для доставки в целевую ПС.
25. Устройство по п.23, дополнительно содержащее средство для определения, может ли контроллер подвижных станций (КПС) определить местоположение целевой ПС, если никакой КБС, связанный с КПС, не может определить местоположение целевой ПС.
26. Устройство по п.25, дополнительно содержащее средство для передачи информации в КПС для доставки в целевую ПС, если КПС определяет местоположение целевой ПС.
27. Контроллер базовой станции (КБС) для поискового вызова целевой подвижной станции (ПС), содержащий
приемник, выполненный с возможностью приема информации от целевой ПС,
передатчик, выполненный с возможностью передачи информации в целевую ПС, и
процессор, выполненный с возможностью осуществления поискового вызова целевой ПС путем
приема информации, предназначенной для целевой ПС, и
выполнения поискового вызова целевой ПС в области поискового вызова, которая имеет центр в ячейке, в которой целевая ПС зарегистрировалась последний раз, и которую расширяют на заданное количество ячеек вокруг данной ячейки.
28. Контроллер базовой станции по п.27, в котором процессор дополнительно выполнен с возможностью передачи информации в КБС для доставки в целевую ПС, если КБС определяет местоположение целевой ПС.
29. Контроллер базовой станции по п.28, в котором процессор дополнительно выполнен с возможностью определения соседнего КБС, который может определить местоположение целевой ПС, если данный КБС не может определить местоположение целевой ПС.
30. Контроллер базовой станции по п.29, в котором процессор дополнительно выполнен с возможностью передачи информации в соседний КБС, который определяет местоположение целевой ПС, для доставки в целевую ПС.
31. Контроллер базовой станции по п.29, в котором процессор дополнительно выполнен с возможностью определения, может ли контроллер подвижных станций (КПС) определить местоположение целевой ПС, если никакой КБС, связанный с КПС, не может определить местоположение целевой ПС.
32. Контроллер базовой станции по п.31, в котором процессор дополнительно выполнен с возможностью передачи информации в КПС для доставки в целевую ПС, если КПС определяет местоположение целевой ПС.
| US 6219548 B1, 17.04.2001 | |||
| US 6181933 B1, 30.01.2001 | |||
| US 5369681 A, 29.11.1994 | |||
| ДВУНАПРАВЛЕННАЯ РАДИОПЕЙДЖИНГОВАЯ СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ И РЕГИСТРАЦИИ ЗОН ОБСЛУЖИВАНИЯ | 1997 |
|
RU2154356C2 |

