Приоритет на основании 35 U.S.C. §119
Приоритет настоящей заявки заявлен на основании даты подачи предварительной заявки № 60/662301 на изобретение "Объединение информации о множестве других секторов при управлении мощностью системы беспроводной связи с использованием ортогонального мультиплексирования", поданной 15 марта 2005 г., предварительной заявки № 60/731037 на изобретение "Способы и устройства для уменьшения МАС в мобильной широкополосной беспроводной среде" и предварительной заявки № 60/731126 на изобретение "Способы и устройства для увеличения МАС в мобильной широкополосной беспроводной среде", поданных 27 октября 2005 г., которые включены в данный документ для сведения.
Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к области связи и, более конкретно, к использованию информации из множества секторов для управления мощностью беспроводного терминала.
Уровень техники
Система беспроводной связи с многостанционным доступом может поддерживать связь для множества беспроводных терминалов одновременно. Каждый терминал осуществляет связь с одним или более секторами посредством передач на прямых и обратных линиях связи. Под прямой (или нисходящей) линией связи подразумевается линия связи, ведущая от секторов к терминалам, а под обратной (или восходящей) линией связи подразумевается линия связи, ведущая от терминалов к секторам.
Множество терминалов могут одновременно вести передачу на обратной линии связи благодаря мультиплексированию их передач ортогонально друг другу. При мультиплексировании прилагаются усилия по обеспечению ортогональности между множеством передач на обратной линии связи во временной, частотной и/или кодовой области. Полная ортогональность, если она достигается, приводит к тому, что передача от каждого терминала не создает помех для передач от других терминалов в приемном секторе. Однако часто полную ортогональность между передачами из различных терминалов невозможно реализовать из-за состояния каналов, несовершенства приемников и т.п. Потеря ортогональности приводит к тому, что каждый терминал создает некоторое количество помех для других терминалов, осуществляющих связь с тем же самым сектором. Кроме того, передачи из терминалов, осуществляющих связь с различными секторами, обычно не ортогональны друг другу. Поэтому каждый терминал может также создавать помехи для терминалов, осуществляющих связь с соседними секторами. При этом качество работы каждого терминала ухудшается в результате помех от всех других терминалов в системе.
Поэтому существует потребность в способах уменьшения влияния помех, которые бы позволили повысить качество работы.
Сущность изобретения
Предложены способы управления мощностью передачи для передачи данных из беспроводного терминала, позволяющие уменьшить "внутрисекторные" и "межсекторные" помехи. Мощность передачи регулируется таким образом, чтобы поддерживать в пределах допустимых уровней как величину внутрисекторных помех, которые терминал может создать "обслуживающему" сектору, так и величину межсекторных помех, которые терминал может создать "соседним" секторам (определение терминов в кавычках будет дано ниже). Величину межсекторных помех, которые может создать терминал, можно приблизительно оценить на основании (1) общих помех, наблюдаемых каждым соседним сектором, (2) усилений каналов для обслуживающих и соседних секторов, (3) текущего уровня мощности передачи, используемого терминалом, и (4) возможно, других параметров. Каждый сектор может широковещательно передавать отчет (например, какое-то значение), указывающий общие помехи, наблюдаемые в этом секторе. Усиление канала для каждого сектора можно оценить на основании пилот-сигнала, полученного из данного сектора. Мощность передачи можно корректировать вероятностным методом, детерминированным методом или каким-то другим методом на основании объединения отчетов о помехах из множества секторов для одной корректировки мощности передачи.
Обычно мощность передачи можно уменьшить, если в соседних секторах наблюдается высокий уровень помех, и увеличить, если наблюдается низкий уровень помех. Мощность передачи можно изменять на бульшую величину и/или более часто, если (1) терминал расположен ближе к соседнему сектору, наблюдающему высокий уровень помех, и/или (2) текущий уровень мощности передачи выше. Мощность передачи можно изменять на меньшую величину и/или более редко, если (1) терминал расположен ближе к обслуживающему сектору, и/или (2) текущий уровень мощности передачи ниже. Внутрисекторные помехи, вызванные данным терминалом, поддерживаются в допустимых пределах путем ограничения качества принимаемого сигнала (SNR) для передачи данных в пределах допустимых SNR.
Далее будут более подробно описаны различные аспекты и варианты настоящего изобретения.
Краткое описание чертежей
Существенные признаки и сущность настоящего изобретения станут более понятными из представленного ниже подробного описания в совокупности с прилагаемыми чертежами, на которых одинаковые элементы указаны одинаковыми ссылочными обозначениями и на которых
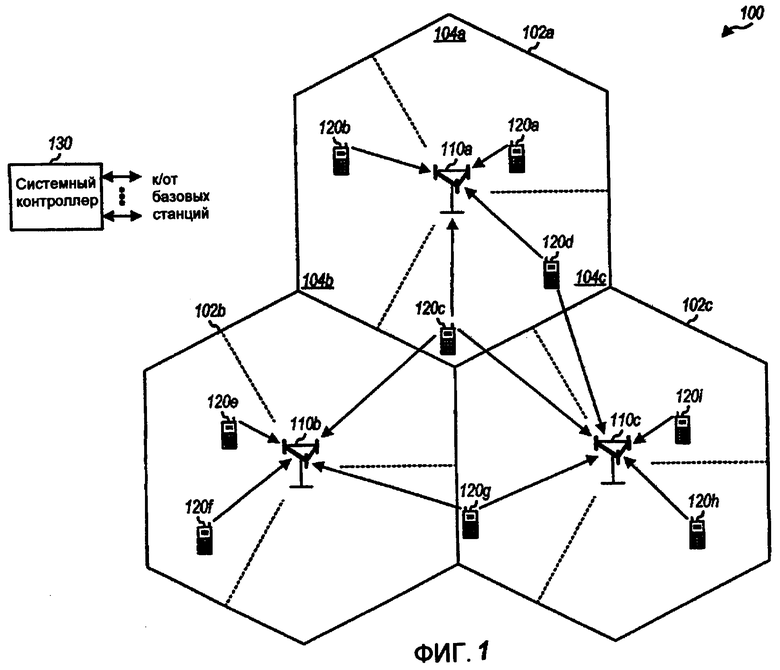
фиг.1 изображает систему беспроводной связи с многостанционным доступом;
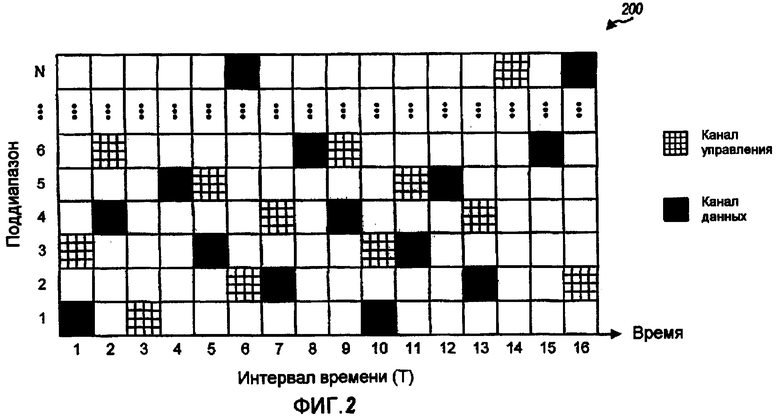
фиг.2 изображает скачкообразную перестройку частоты на частотно-временной плоскости;
фиг.3 иллюстрирует способ корректировки мощности передачи путем объединения индикаций помех из множества секторов;
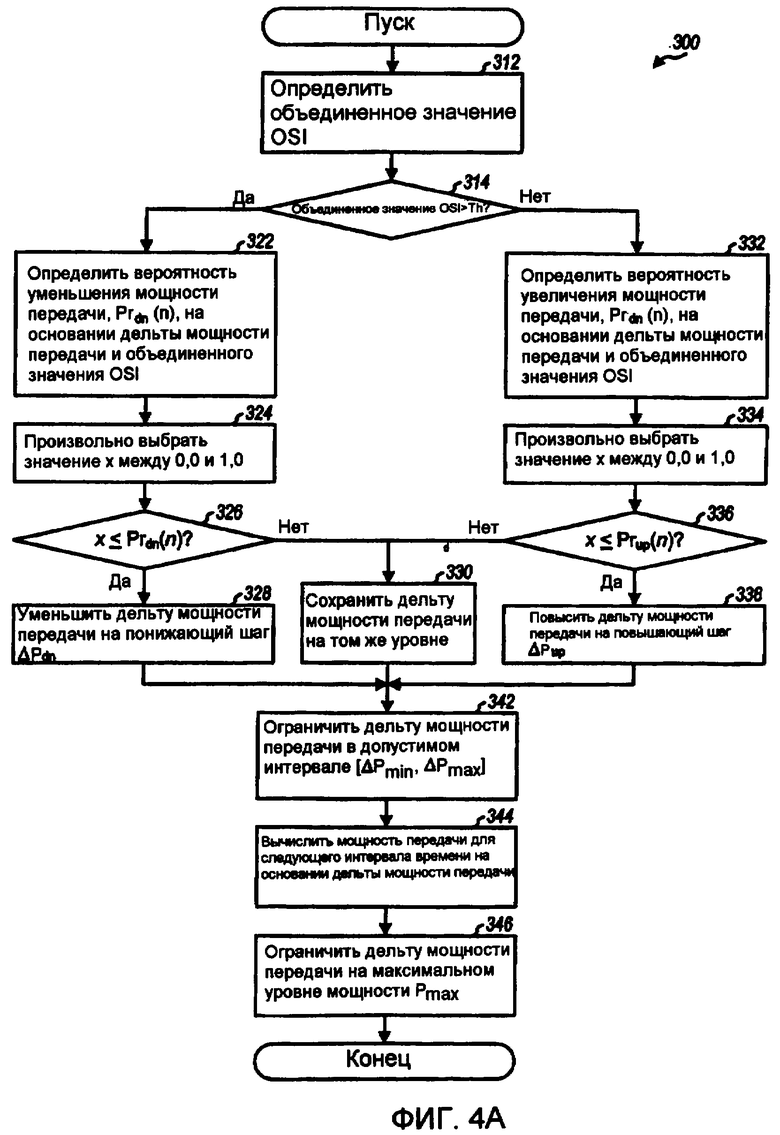
фиг.4А иллюстрирует способ корректировки мощности передачи вероятностным методом;
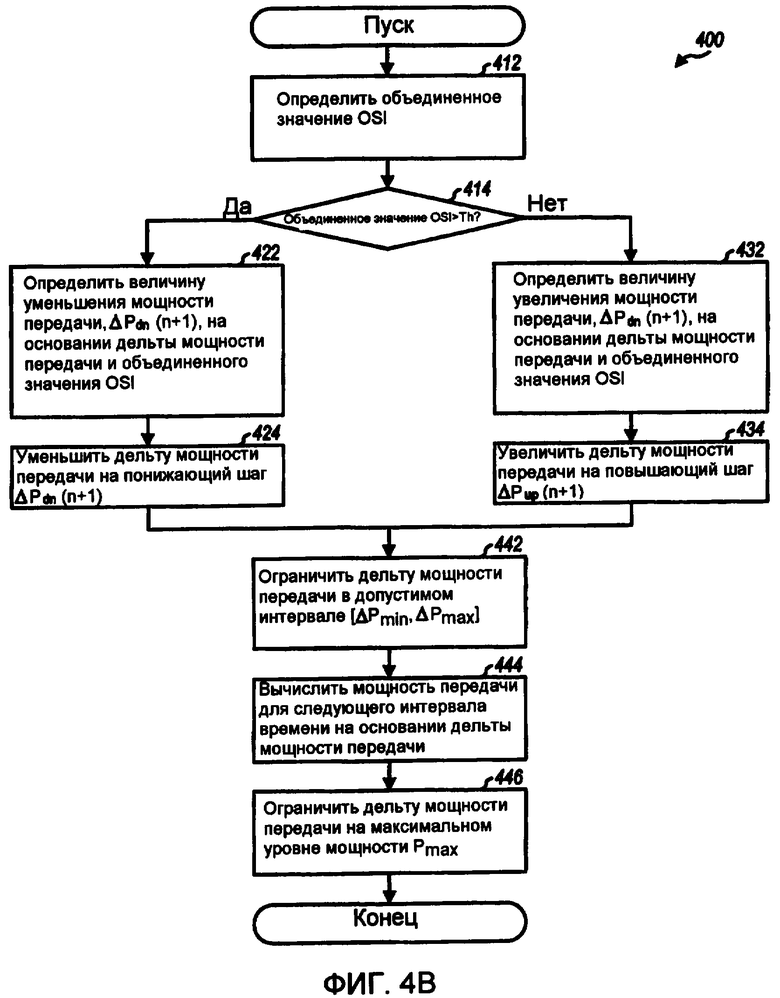
фиг.4В иллюстрирует способ корректировки мощности передачи детерминированным методом;
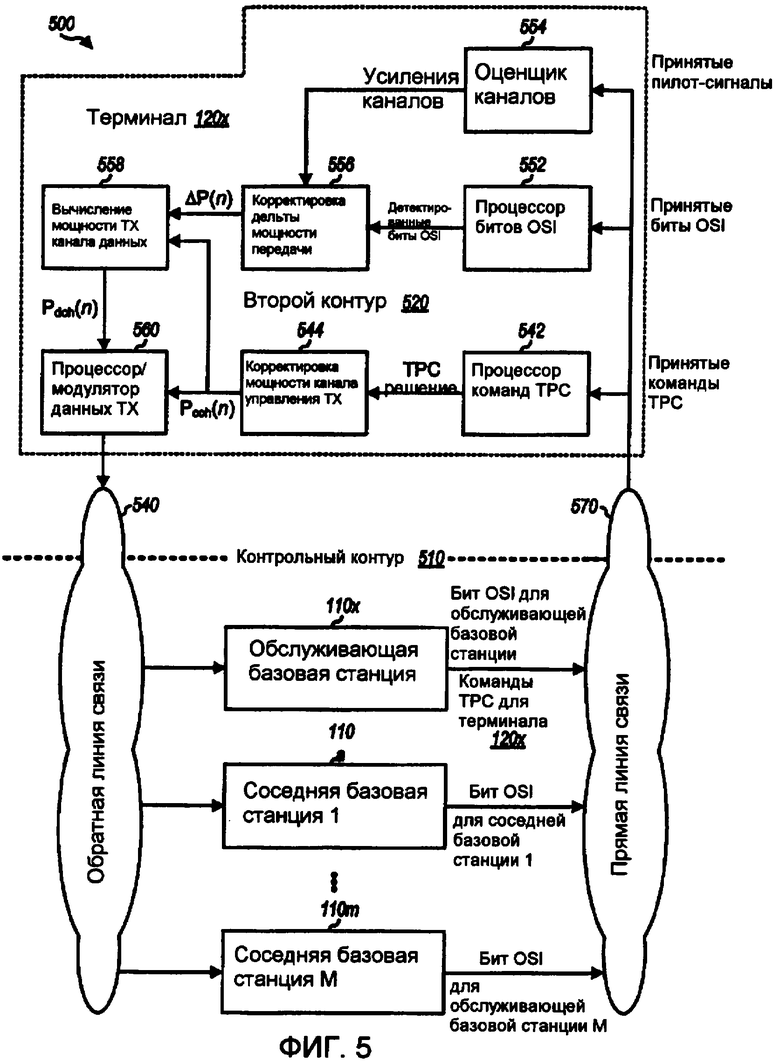
фиг.5 изображает механизм управления мощностью для канала данных;
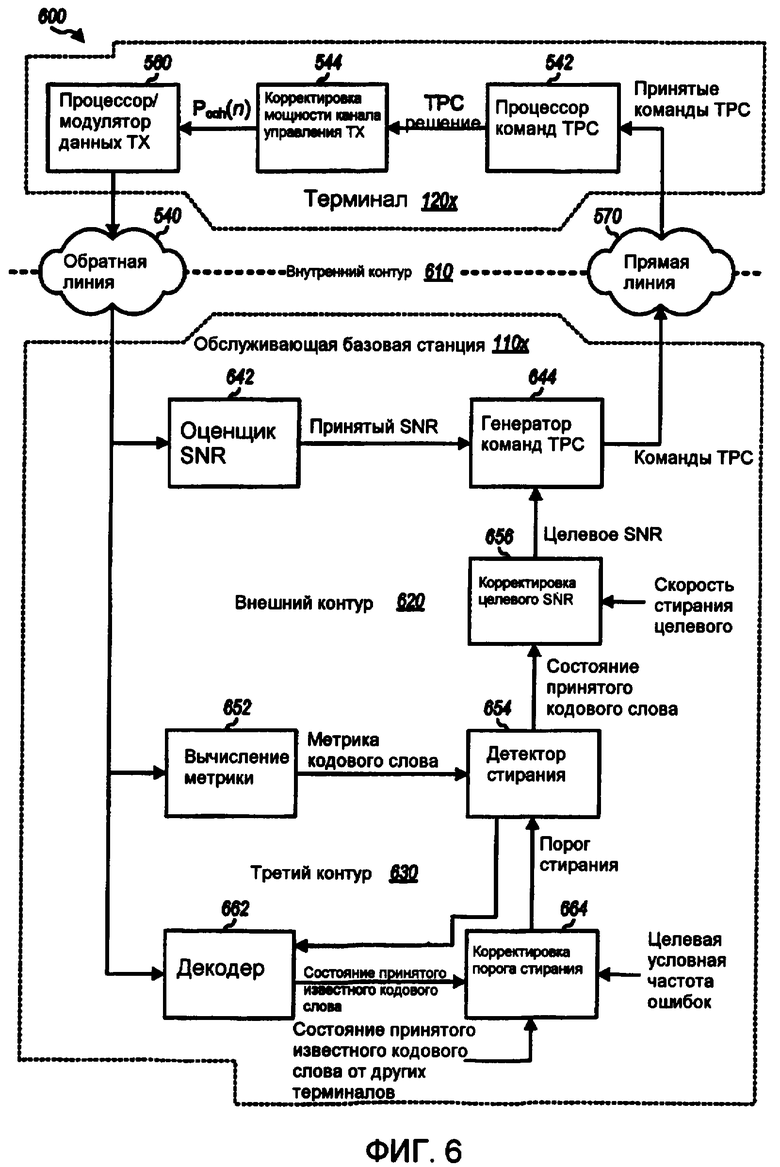
фиг.6 изображает механизм управления мощностью для канала управления, и
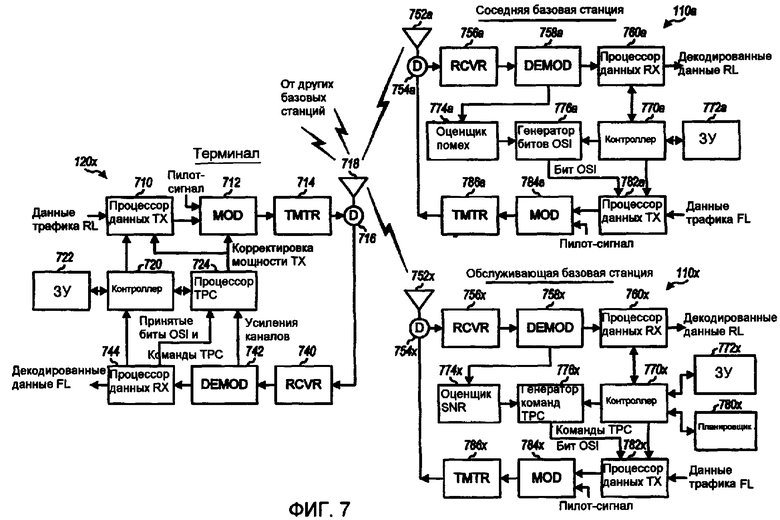
фиг.7 изображает терминал, обслуживающий сектор и соседний сектор.
Осуществление изобретения
Термин "примерный" в данном контексте означает "служащий в качестве примера или иллюстрации". Любой вариант или конструкцию, описанные как "примерные", не следует обязательно рассматривать как предпочтительные или обладающие преимуществами по отношению к другим вариантам или конструкциям.
На фиг.1 изображена система 100 беспроводной связи с многостанционным доступом. Система 100 содержит множество базовых станций 110, которые поддерживают связь для множества беспроводных терминалов 120. Терминалы 120 обычно рассредоточены по всей системе, и каждый из них может быть стационарным или подвижным. Терминал может также называться мобильной станцией, абонентским аппаратом (АА), устройством беспроводной связи или другим термином. Под базовой станцией подразумевается стационарная станция, используемая для осуществления связи с терминалами, и она может также называться точкой доступа, узлом В или другим термином. Системный контроллер 130 связан с базовыми станциями 110, а также осуществляет управление маршрутизацией данных для терминалов, обслуживаемых этими базовыми станциями.
Каждая базовая станция 110 обеспечивает охват связью на соответствующей территории 102. Базовая станция и/или ее зона охвата может называться "сотой" в зависимости от контекста, в котором используется данный термин. Для увеличения пропускной способности зона охвата каждой базовой станции может быть разделена на множество (например, три) секторов 104. Каждый сектор обслуживается базовой приемопередающей подсистемой (BTS). Термин "сектор" может относиться к BTS и/или ее зоне охвата, в зависимости от контекста, в котором используется данный термин. Базовая станция разделенной на сектора соты обычно включает в себя все BTS для всех секторов данной соты. Для простоты в дальнейшей термин "базовая станция" используется в качестве родового понятия как для стационарной станции, которая обслуживает соту, так и для стационарной станции, которая обслуживает сектор. "Обслуживающая" базовая станция или "обслуживающий" сектор - это станция или сектор, с которым осуществляет связь данный терминал. "Соседняя" базовая станция или "соседний" сектор - это станция или сектор, с которым данный терминал не осуществляет связь. Для простоты в дальнейшем предполагается, что каждый терминал осуществляет связь с одной обслуживающей базовой станцией, хотя это и не является необходимым ограничением для предложенных способов.
Описанные способы управления мощностью можно использовать в различных системах беспроводной связи. Например, их можно использовать в системе с многостанционным доступом с временным разделением каналов (TDMA), системе с многостанционным доступом с частотным разделением каналов (FDMA), системе с ортогональным многостанционным доступом с частотным разделением каналов (ОFDMA) и т.п. В системе TDMA используется временное мультиплексирование (TDM), и передачи для различных терминалов ортогонализируются путем их передачи в различных интервалах времени. В системе FDMA используется частотное мультиплексирование (FDM), и передачи для различных терминалов ортогонализируются посредством передачи на различных поднесущих. В системах TDMA и FDMA можно также использовать кодовое мультиплексирование (CDM). В этом случае передачи для множества терминалов можно ортогонализировать с помощью различных ортогональных кодов (например, кода Уолша), даже если они отправляются в одном и том же интервале времени или на одной и той же поднесущей. В системе ОFDMA используется ортогональное частотное мультиплексирование (ОFDM), которое фактически разделяет всю ширину полосы системы на множество (N) ортогональных поднесущих. Эти поднесущие также могут называться тонами, бинами, частотными каналами и т.д. Каждую поднесущую можно модулировать данными. В системе ОFDMA можно использовать любые комбинации временного, частотного и/или кодового мультиплексирования. Для ясности предложенные методы управления мощностью будут описываться в дальнейшем для системы ОFDMA.
На фиг.2 показана скачкообразная перестройка частоты (FH) на частотно-временной плоскости 200 для системы ОFDMA. При скачкообразной перестройке частоты каждый канал трафика связан с конкретной последовательностью FH, которая указывает конкретную поднесущую(ие) для использования с данным каналом трафика в каждом интервале времени. Последовательности FH для различных каналов трафика в каждом секторе ортогональны друг другу, так что никакие два канала трафика не используют одну и ту же поднесущую в любом интервале времени. Последовательности FH для каждого сектора также псевдослучайны относительно последовательностей FH для ближайших секторов. Помехи между двумя каналами трафика в двух секторах возникают в том случае, если эти два канала трафика используют одну и ту же поднесущую в одном и том же интервале времени. Однако межсекторные помехи рандомизируются благодаря псевдослучайному характеру последовательностей FH, используемых для различных секторов.
Каналы данных могут выделяться активным терминалам таким образом, чтобы каждый канал данных использовался всего одним терминалом в любой данный момент времени. Для экономии ресурсов системы можно разделять каналы управления между множеством терминалов, используя, например, кодовое мультиплексирование. Если каналы данных мультиплексируются ортогонально только по частоте и времени (но не коду), то они меньше подвержены потере ортогональности из-за условий канала и несовершенства приемников, чем каналы управления.
Следовательно, каналы данных имеют несколько ключевых параметров, связанных с управлением мощностью. Во-первых, внутрисотовые помехи на каналах данных минимальны благодаря ортогональному частотному и временному мультиплексированию. Во-вторых, межсотовые помехи рандомизированы благодаря тому, что соседние секторы используют различные последовательности FH. Величина межсотовых помех, созданных данным терминалом, определяется (1) уровнем мощности передачи, используемым данным терминалом, и (2) положением терминала относительно соседних секторов.
Для каналов данных управление мощностью можно осуществлять таким образом, чтобы каждому терминалу разрешалось вести передачу с возможным высоким уровнем мощности, сохраняя при этом внутрисотовые и межсотовые помехи на допустимом уровне. Терминалу, расположенному ближе к его обслуживающему сектору, можно позволить вести передачу с более высоким уровнем мощности, так как этот терминал, вероятно, создаст меньше помех для соседних секторов. И наоборот, терминалу, расположенному дальше от его обслуживающего сектора в направлении края сектора, можно позволить вести передачу с более низким уровнем мощности, так как это терминал может создавать больше помех для соседних секторов. Такое управление мощностью передачи может потенциально уменьшить общий уровень помех, наблюдаемый в каждом секторе, и при этом позволяет "квалифицированным" терминалам достигать более высоких SNR, а значит более высоких скоростей передачи данных.
Для достижения перечисленных целей управление мощностью каналов данных можно реализовать различными методами. Для пояснения далее будет описан конкретный вариант управления мощностью. В этом варианте мощность передачи канала данных для данного терминала можно выразить следующим образом:
где Pdch(n) - мощность передачи канала данных для интервала обновления n;
Pref(n) - контрольный уровень мощности для интервала обновления n и
ΔP(n) - дельта мощности передачи для интервала обновления n.
Уровни мощности Pdch(n) и Pref(n) и дельта мощности передачи ΔP(n) приводятся в децибелах (дБ).
Контрольный уровень мощности - это величина мощности передачи, необходимая для достижения целевого качества сигнала для назначенной передачи (например, на канале управления). Качество сигнала (обозначенное как SNR) можно количественно выразить в виде отношения сигнал-шум, отношения сигнал-шум плюс помехи и т.п. Контрольный уровень мощности и целевое SNR можно корректировать с помощью механизма управления мощностью для обеспечения требуемого уровня качества работы для назначенной передачи, как будет описано ниже. Если контрольный уровень мощности может достичь целевого SNR, то принятое SNR для канала данных можно оценить следующим образом:
Уравнение (2) основано на предположении, что канал данных и канал управления имеют одинаковую статистику помех. Это имеет место, например, если каналы управления и данных из различных секторов могут создавать взаимные помехи. Контрольный уровень мощности можно определить, как будет описано ниже.
Мощность передачи для канала данных можно установить на основании различных факторов, таких как (1) величина межсекторных помех, которые может создать данный терминал для других терминалов в соседних секторах; (2) величина внутрисекторных помех, которые может создать данный терминал другим терминалам в том же самом секторе; (3) максимальный уровень мощности, разрешенный данному терминалу, и (4) возможно, других факторов. Каждый из этих факторов будет описан ниже.
Величину внутрисекторных помех, которые может создать каждый терминал, можно определять различными методами. Например, величину межсекторных помех, создаваемых каждым терминалом, может оценивать непосредственно каждый соседний сектор и отправлять ее терминалу, который может затем соответственно скорректировать мощность передачи на основании объединения переданных оценок межсекторных помех. Такое индивидуализированное сообщение о помехах может потребовать применения обширной служебной сигнализации. Для простоты величину межсекторных помех, которые может создать каждый терминал, можно приблизительно оценить на основании величины (1) общих помех, наблюдаемых в каждом соседнем секторе, (2) усилений каналов для обслуживающих и соседних секторов и (3) уровня мощности передачи, используемого данным терминалом. Далее будут описаны величины (1) и (2).
Каждый сектор может оценить суммарную или среднюю величину помех, наблюдаемых данным сектором. Это можно реализовать посредством оценки мощности помех на каждой поднесущей и вычисления средней мощности помех на основании оценок мощности помех для отдельных поднесущих. Среднюю мощность помех можно получить, используя различные методы выведения среднего, например, арифметического метода выведения среднего, геометрического метода выведения среднего, выведения среднего на основе SNR, и т.п.
В отдельных аспектах изобретения можно использовать арифметическое выведение среднего значения помех в секторе. В других аспектах можно использовать геометрическое выведение среднего. Можно также применить выведение среднего SNR в других аспектах. Различные принципы и методы выведения среднего описаны и раскрыты в совместно рассматриваемой заявке на патент США 10/897463, упоминаемой в данном документе в полном объеме для сведения.
Независимо от используемого метода выведения среднего каждый сектор может фильтровать оценки мощности помех и/или среднюю мощность помех в течение множества интервалов времени, чтобы улучшить качество измерения помех. Эту фильтрацию можно реализовать с помощью фильтра с конечной импульсной характеристикой (КИХ), фильтра с бесконечной импульсной характеристикой (БИХ) и некоторых других известных типов фильтров. Поэтому термин "помехи" может относиться как к отфильтрованным, так и к не отфильтрованным помехам.
Каждый сектор может широковещательно передавать свои замеры помех для использования терминалами в других секторах. Широковещательная передача замеров помех может быть реализована разными способами. В одном варианте средняя мощность помех (или "измеренные" помехи) квантуется в заранее определенное количество бит, которые затем посылаются по широковещательному каналу. В другом варианте измеренные помехи широковещательно передаются с помощью одного бита, который показывает, являются ли измеренные помехи более высокими или более низкими, чем номинальный порог помех. В еще одном варианте измеренные помехи передаются с использованием двух битов. Один бит показывает измеренные помехи относительно номинального порога помех. Другой бит можно использовать как бит тревоги, показывающий, превышают ли измеренные помехи высокий порог помех. Замеры помех можно также передавать другими способами.
Для упрощения описания в дальнейшем предполагается, что для передачи информации о помехах используется один бит помех другого сектора (OSI). Каждый сектор может установить свое значение (OSIB) следующим образом: '0', если Imeas,m(n)<Itarget; '1', если Imeas,m(n)≥Itarget, и '2', если Imeas,m(n)≥Itarget+N, где Itarget - номинальный порог помех, Imeas,m - измеренные помехи, и N - некоторый верхний связанный порог, показывающий верхний связанный порог, свидетельствующий об избыточных помехах.
Альтернативно, каждый сектор может получить измеренное значение отношения мощности взаимных помех к мощности тепловых помех (IOT), которое представляет собой отношение общей мощности взаимных помех, наблюдаемых каждым сектором, к мощности тепловых помех. Общую мощность помех можно вычислить, как было описано выше. Мощность тепловых помех можно оценить посредством выключения передатчика и измерения шума в приемнике. Можно выбрать конкретную рабочую точку для системы и обозначить ее как IOTtarget. Более высокая рабочая точка позволяет терминалам использовать более высокие мощности передачи (в среднем) для каналов данных. Однако очень высокая рабочая точка может быть нежелательной, так как система может стать ограниченной по помехам, т.е. возникнет ситуация, при которой увеличение мощности передачи не будет преобразовываться в увеличение принимаемого SNR. Кроме того, очень высокая рабочая точка повышает вероятность нестабильности системы. В любом случае, каждый сектор может установить свое значение OSI следующим образом: '0', если IOTmeas,m(n)<IOTtarget; '1', если IOTmeas,m(n)≥IOTtarget, и '2', если OTImeas,m(n)≥IOTtarget+N, где IOTmean,m(n) - измеренное IOT для сектора m в интервале времени n и N - некоторый верхний связанный порог, указывающий на избыточные помехи.
В обоих случаях значение OSI можно использовать для управления мощностью, как будет описано ниже. Следует отметить, что значение OSI может иметь любой требуемый размер и иметь больше или меньше трех состояний.
Каждый терминал может оценить усиление канала (или усиление трассы прохождения сигнала) для каждого сектора, который может принимать передачи по обратной линии связи от данного терминала. Усиление канала для каждого сектора можно оценить посредством обработки пилот-сигнала, принятого из этого сектора по прямой линии связи, оценки силы/мощности принятого пилот-сигнала и фильтрации оценок силы пилот-сигнала в течение времени (например, с помощью фильтра, имеющего константу времени в несколько сотен миллисекунд), чтобы удалить эффекты быстрого затухания и т.п. Если все секторы передают свои пилот-сигналы с одинаковым уровнем мощности, то сила принимаемого пилот-сигнала для каждого сектора характеризует усиление канала между этим сектором и терминалом. Терминал может сформировать вектор G отношения усилений канала следующим образом:
где
gs(n) - усиление канала между терминалом и обслуживающим сектором;
gni(n) - усиление канала между терминалом и соседним сектором i;
ps(n) - относительная мощность сигнала, например пилот-сигнала, исходящего из обслуживающего сектора и приходящего в терминал;
pni(n) - относительная мощность сигнала, например пилот-сигнала, исходящего из соседнего сектора i и приходящего в терминал, и
ri(n) - отношение усилений канала для соседнего сектора i.
Так как расстояние находится в обратной зависимости с усилением канала, отношение усилений канала gs(n)/gni(n) можно рассматривать как "относительное расстояние", показывающее расстояние до соседнего сектора i относительно расстояния до обслуживающего сектора. Обычно отношение усилений канала для соседнего сектора, ri(n) уменьшается по мере того, как терминал перемещается по направлению к краю сектора, и увеличивается по мере того, как терминал приближается к обслуживающему сектору. Вектор отношения усилений канала G можно использовать для управления мощностью, как будет описано ниже.
Хотя каналы данных для каждого сектора мультиплексируются таким образом, чтобы они были ортогональными друг к другу, некоторая потеря ортогональности может возникать из-за помех между несущими (ICI), помех между символами (ISI) и т.п. Эта потеря ортогональности вызывает внутрисекторные помехи. Для уменьшения внутрисекторных помех мощность передачи каждого терминала можно регулировать так, чтобы величина внутрисекторных помех, которые данный терминал может создать для других терминалов в том же самом секторе, поддерживалась в рамках допустимого уровня. Для этого можно, например, установить требование, чтобы принятое SNR канала данных для каждого терминала находилось в пределах заданного интервала SNR, следующим образом:
где SNRmin - минимальное принимаемое SNR, допустимое для канала данных, и
SNRmax - максимальное принимаемое SNR, допустимое для канала данных.
Минимальное принимаемое SNR гарантирует, что все терминалы, особенно те, которые находятся у края сектора, могут достичь минимального уровня качества работы. Без такого ограничения терминалы, находящиеся возле края сектора, могут быть вынуждены вести передачу с чрезвычайно низким уровнем мощности, так как они часто добавляют существенное количество межсекторных помех.
Если принимаемые SNR для каналов данных всех терминалов ограничены в пределах [SNRmin, SNRmax], то можно предположить, что величина внутрисекторных помех, созданных каждым терминалом из-за потери ортогональности, находится в допустимых пределах. При ограничении принимаемых SNR в пределах этого интервала SNR все еще может оставаться разность [SNRmax-SNRmin] дБ в принимаемой спектральной плотности мощности между соседними поднесущими (если допустить, что на поднесущих наблюдаются аналогичные величины межсекторных помех, что верно, например, если каналы управления и данных производят перестройку частоты случайным образом, так что может возникать коллизия между каналами управления и каналами данных из разных секторов). Маленький диапазон SNR повышает робастность системы в присутствии ICI и ISI. Было обнаружено, что диапазон SNR величиной 10 дБ обеспечивает хорошее качество работы в большинстве рабочих сценариев. Можно также использовать и другие диапазоны SNR.
Если мощность передачи канала данных определяется, как показано в уравнении (1), то принятое SNR для канала данных можно поддерживать в интервале [SNRmin, SNRmax] путем ограничения дельта мощности передачи, ΔP(n), в соответствующем диапазоне следующим образом:
где ΔPmin - минимальная дельта мощности передачи, допустимая для канала данных, и
ΔPmax - максимальная дельта мощности передачи, допустимая для канала данных.
В частности: ΔPmin=SNRmin-SNRtarget и ΔPmax=SNRmax-SNRtarget. В другом варианте мощность передачи Pdch(n) можно ограничить в интервале, который определяется, например, на основании мощности принятого сигнала канала данных. Этот вариант можно использовать, например, если мощность помех статистически отличается среди поднесущих.
Мощность передачи для канала данных каждого терминала можно затем скорректировать на основании следующих параметров:
значения OSI, широковещательно передаваемого каждым сектором;
вектора отношения усилений канала, G , вычисленного терминалом;
интервала принимаемых SNR, допустимого для каналов данных, [SNRmin,SNRmax], или эквивалентно, интервала допустимых дельт мощности передачи [ΔРmin,ΔРmax], и
максимального уровня мощности Pmax, допустимого для терминала, который может быть установлен системой или усилителем мощности в терминале.
Параметры 1 и 2 относятся к межсекторным помехам, вызванным данным терминалом. Параметр 3 относится к внутрисекторным помехам, вызванным данным терминалом.
Обычно терминал, находящийся близко к соседнему сектору, который сообщает о высоком уровне помех, может вести передачу с более низкой дельта мощности передачи, так что его принимаемое SNR ближе к SNRmin. И наоборот, терминал, находящийся близко к своему обслуживающему сектору, может вести передачу с более высокой дельтой мощности передачи, так что его принимаемое SNR ближе к SNRmax. Градацию принимаемых SNR можно наблюдать для терминалов в системе в зависимости от их близости к обслуживающим секторам. Планировщик в каждом секторе может воспользоваться распределением принимаемых SNR, чтобы достичь высокой пропускной способности, гарантируя при этом равноправие для терминалов.
Мощность передачи канала данных можно корректировать различными методами на основании четырех параметров, упомянутых выше. Механизм управления мощностью не должен сохранять равные SNR для всех терминалов, особенно в ортогональной системе типа системы OFDMA, в которой терминалы, находящиеся ближе к сектору, могут вести передачу с более высокими уровнями мощности, не создавая особых проблем для других терминалов. Для ясности ниже будет описан конкретный вариант корректировки мощности передачи. В этом варианте каждый терминал контролирует значения OSI, широковещательно передаваемые соседними секторами, а затем объединяет значения OSI из множества соседних секторов, чтобы определить, следует ли ему повысить, понизить или сохранить свою мощность передачи на обратной линии связи.
Необходимо создать такой алгоритм корректировки мощности передачи терминала на основании значений OSI из М соседних секторов, при котором OSIВ соседнего сектора, имеющего меньшее усиление канала, оказывало бы большее влияние на корректировку мощности, чем OSIB соседнего сектора, имеющего большее усиление канала. Кроме того, если имеется всего один соседний сектор, этот алгоритм должен быть эквивалентен использованию OSIB только этого сектора. Если имеется два сектора с приблизительно одинаковым усилением канала, мощность должна уменьшаться, если любой сектор показывает уровни помех выше его порога, например, OSIB=1 или 2 из любого сектора. То есть, если любой из "близких" соседних секторов испытывает избыточные помехи, терминал должен уменьшить свою мощность, чтобы помочь соседнему сектору уменьшить его уровень помех.
Таким образом, объединенное значение OSI определяет направление, в котором следует корректировать мощность передачи. Величина корректировки мощности передачи для каждого терминала может зависеть от (1) текущего уровня мощности передачи (или текущей дельты мощности передачи) терминала и (2) отношения усилений канала для секторов, которые были объединены для значений OSI. Примерный способ проиллюстрирован на фиг.3.
На фиг.3 проиллюстрирован способ корректировки мощности передачи путем объединения индикаций помех из множества секторов. Сначала определяется количество секторов, для которых были детектированы значения OSI, блок 210. Если это количество равно нулю, то можно использовать максимальное имеющееся значение ΔP(n), блок 215. Если это количество равно единице, то можно использовать алгоритм корректировки мощности с применением одного значения OSI, блок 220. На фиг.4А и 4В показаны и обсуждаются различные примерные принципы. Однако можно использовать и другие принципы и методы.
Если это количество равно двум или более, определяется отношение усилений каналов для каждого сектора, подлежащего использованию для корректировки мощности, блок 225. Это могут быть все сектора, от которых данный терминал может принимать сигналы, например пилот-сигналы, или подгруппа секторов. Данное определение может быть основано на следующем:

где RxPowerRL,SS - мощность пилот-сигналов, принятых терминалом для обслуживающего сектора по обратной линии связи;
TransmitPowerRL,SS - мощность пилот-сигналов, переданных из обслуживающего сектора по обратной линии связи, которая является системным параметром;
RxPoweri - мощность пилот-сигналов, принятых терминалом для i-го сектора, и
TransmitPoweri - мощность пилот-сигналов, переданных из i-го сектора, которая является системным параметром.
Следует отметить, что мощность переданных пилот-сигналов может сообщаться в заголовке сообщения или может быть постоянной по всей системе. Например, если пилот-сигналы являются пилот-сигналами захвата, то мощность может быть максимальной мощностью, допустимой в этом секторе для некоторого числа периодов символов.
Затем терминал определяет порог для каждого принятого значения OSI, блок 230. Порог значения OSI для каждого из секторов можно определить следующим образом:

где UpDecisionThresholdMin и DownDecisionThresholdMin - заданные системные параметры, которые могут быть постоянными или могут обновляться во время любого сеанса связи. Переменные a и bi можно определить следующим образом:
и
где RDCHGainMax - максимальное усиление, RDCHGainMin - минимальное усиление, ChanDiffMax - максимальное усиление канала, и ChanDiffMin - минимальное усиление канала. Эти параметры являются заданными системными параметрами, которые могут быть постоянными или обновляться во время любого сеанса связи.
После этого терминал может определить, показывает ли каждый порог, что необходимо повысить, понизить или сохранить мощность для этого значения OSI, блок 235. Это определение можно выполнить следующим образом:
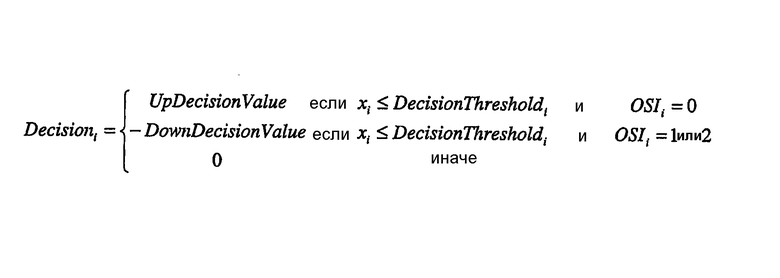
где 0≤xi≤1, UpDecisionValue и DownDecisionValue - заданные системные параметры, которые могут быть постоянными или могут обновляться во время любого сеанса связи.
После этого терминал объединяет усиления канала и индикации корректировки мощности на основании присвоения некоторого весового коэффициента, чтобы сформировать весовое решение, блок 240. Весовое решение можно определить следующим образом:
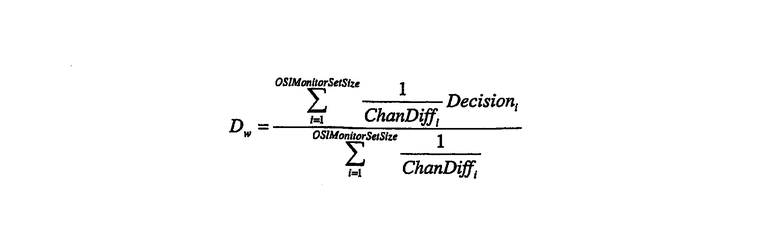 Уравнение (12)
Уравнение (12)
где ChanDiffi - усиление канала для каждого терминала, OSIMonitorSetSize - количество секторов, для которых были приняты или используются значения OSI, и Decisioni - указанная корректировка мощности для каждого терминала.
Это объединенное определение можно затем использовать для корректировки мощности, блок 250. Различные примерные варианты будут описаны со ссылками на фиг.4А и 4В. Однако можно использовать и другие принципы и методы.
В некоторых других аспектах изобретения можно использовать дополнительные функции для определения корректировки мощности. Например, терминал может найти сектор с самым высоким усилением канала и определить, какое значение OSI следует использовать на основании того, были ли получены передачи с самыми сильными пилот-сигналами и значения OSI из этого сектора. Например, терминал может принять такое решение следующим образом:

Уравнение (13)
 Уравнение (14)
Уравнение (14)
где OSI2SequenceNumMax - заданное значение, PilotPNCurrent - текущий сектор с текущим самым большим усилением канала, PilotPNStrongest - предыдущий сектор с самым большим усилением канала, и OSI2SequenceNum - количество последовательных случаев отправки текущим сектором самого высокого значения OSI для данного терминала.
Затем терминал доступа может повысить свою ΔP(n) на заданное значение усиления, если Dw больше или равно какому-то порогу, уменьшить свою ΔP(n) на заданное усиление, которое может быть равно или отличаться от усиления, использованного для повышения, или уменьшить свою ΔP(n) посредством уменьшения усиления, умноженного на количество случаев, когда текущий сектор имел самое высокое усиление канала, если Dw меньше или равно второму порогу. Кроме того, ΔP(n) обычно ограничивают между минимальным и максимальным усилением, которые являются заранее определенными параметрами.
В некоторых аспектах изобретения мощность передачи можно корректировать детерминированным методом, вероятностным методом или каким-либо другим методом. При детерминированной корректировке мощность передачи корректируется заранее определенным образом на основании подходящих параметров. При вероятностной корректировке мощность передачи имеет определенную вероятность корректировки, которая определяется подходящими параметрами. Примерные схемы детерминированной и вероятностной корректировки будут описаны ниже.
На фиг.4А показан алгоритм процесса 300 корректировки мощности передачи вероятностным методом. Процесс 300 может выполняться каждым терминалом и для каждого интервала времени, в котором значение OSI передается по меньшей мере из одного соседнего сектора. Сначала терминал определяет объединенное значение OSI о (блок 312). Затем терминал определяет, равно ли значение OSI '1', или '0', или '2' (блок 314). Если оно равно '2', мощность должна будет уменьшена согласно максимальному значению.
Если значение OSI равно '1', показывая тем самым уровень выше номинального уровня помех, то терминал определяет вероятность уменьшения мощности передачи, Prdn(n) (блок 322). Prdn(n) можно вычислить на основании текущей дельты мощности передачи, ΔP(n) и отношения усилений канала для самого сильного соседнего сектора, rosib(n), или объединенного значения усиления канала, как будет описано ниже. Затем терминал произвольно выбирает значение х между 0.0 и 1.0 (блок 324). В частности, х - это случайная переменная, равномерно распределенная между 0.0 и 1.0. Если случайно выбранное значение х меньше или равно вероятности Prdn(n), определенной в блоке 326, то терминал уменьшает свою дельту мощности передачи на понижающий шаг ΔPdn (блок 328) следующим образом:
В противном случае, если х больше, чем Prdn(n), то терминал сохраняет дельту мощности передачи на текущем уровне (блок 330). После блоков 328 и 330 процесс переходит к блоку 342.
Если OSI значение равно '0' в блоке 314, показывая, что уровень помех ниже номинального, то терминал определяет вероятность повышения мощности передачи, Prup(n), например, на основании ΔP(n) и rosib(n), как будет описано ниже (блок 332). Затем терминал произвольно выбирает значение х между 0.0 и 1.0 (блок 334). Если произвольно выбранное значение х меньше или равно вероятности Prup(n), определенной в блоке 336, то терминал повышает свою дельту мощности передачи на повышающий шаг ΔPup (блок 338) следующим образом:
Размеры шагов ΔPup и ΔPdn можно установить на одинаковое подходящее значение (например, 0,25 дБ, 0,5 дБ, 1,0 дБ и т.д.). Если х больше, чем Prup(n) в блоке 336, то терминал сохраняет дельту мощности передачи на том же уровне (блок 330). После блоков 330 и 338 процесс переходит к блоку 342.
В блоке 342 терминал ограничивает дельту мощности передачи, ΔP(n+1), в пределах допустимого интервала [ΔPmin,ΔPmax]. Затем терминал вычисляет мощность передачи для следующего интервала времени, Pdch(n+1), на основании дельты мощности передачи ΔP(n+1) и контрольного уровня мощности Pref(n+1) для следующего интервала времени, как показано в уравнении (1) (блок 344). Затем терминал ограничивает мощность передачи Pdch(n+1), чтобы она была в пределах максимального уровня мощности (блок 346) следующим образом:
 Уравнение (17)
Уравнение (17)
Терминал использует мощность передачи Pdch(n+1) для следующего интервала времени.
Вероятности Prdn(n) и Prup(n) могут быть функцией дельты мощности передачи, ΔP(n) и отношения усилений канала для самого сильного соседнего сектора, rosib(n), или объединенного значения усиления канала. Можно использовать различные функции для Prdn(n) и Prup(n). Каждая функция может иметь разное влияние на различные характеристики управления мощностью, такие как (1) скорость сходимости корректировки мощности передачи и (2) распределение дельт мощности передачи для терминалов в системе.
В одном варианте вероятности Prdn(n) и Prup(n) можно определить следующим образом:
 Уравнение (18а)
Уравнение (18а)
и
 Уравнение (18b)
Уравнение (18b)
где
 Уравнение (18с)
Уравнение (18с)
 Уравнение (18d)
Уравнение (18d)
PrΔР(n) - вероятность, относящаяся к уровню мощности передачи;
Prgain(n) - вероятность, относящаяся к отношению усилений канала для самого сильного соседнего сектора;

 rmax, rmin - нормирующие постоянные, выбранные для достижения требуемых характеристик управления мощностью;
rmax, rmin - нормирующие постоянные, выбранные для достижения требуемых характеристик управления мощностью;
Prup,min - минимальная вероятность повышающей корректировки мощности передачи, и
Prdn,min - минимальная вероятность понижающей корректировки мощности передачи.
Для варианта, показанного группой уравнений (18), Prdn(n) и Prup(n) являются объединенными вероятностями, которые определяются уровнем мощности передачи и отношением усилений канала. Минимальные вероятности Prup,min и Prdn,min улучшают характеристики стабильности и способствуют некоторому перемещению точек в крайних пределах (например, очень высоких или очень низких значений усиления канала). Вероятности Prdn(n) и Prup(n), полученные, как показано группой уравнений (15), соответствуют общим правилам корректировки мощности передачи, описанным выше. Вероятности Prdn(n) и Prup(n) можно также получить с помощью некоторых других функций, и этот вариант также подпадает под объем изобретения.
На фиг.4В показан алгоритм процесса 400 корректировки мощности передачи детерминированным способом. Процесс 400 может также выполняться каждым терминалом и для каждого интервала времени, в котором передается значение OSI. Терминал обрабатывает объединенное значение OSI (блок 412) и определяет, равно ли значение OSI '1', или '0', или '2' (блок 414). Если значение OSI равно '1', то терминал определяет величину уменьшения своей мощности передачи, ΔPdn(n+1), для следующего интервала времени (блок 422). Переменный размер понижающего шага можно определить на основании текущей дельты мощности передачи ΔP(n), и отношения усилений канала, rosib(n). Затем терминал понижает дельту мощности передачи на ΔPdn(n+1) (блок 424). В противном случае, если значение OSI равно '0', терминал определяет величину увеличения мощности передачи, ΔPup(n+1), для следующего интервала времени, например, на основании ΔP(n) и rosib(n) (блок 432). Затем терминал повышает дельту мощности передачи на ΔPup(n+1) (блок 434). После блоков 424 и 434 терминал ограничивает дельту мощности передачи для следующего интервала времени ΔP(n+1), чтобы она находилась в пределах допустимого интервала [ΔPmin,ΔPmax] (блок 442), и вычисляет и ограничивает мощность передачи для следующего интервала времени, чтобы она была в пределах максимального уровня мощности передачи (блоки 444 и 446).
Переменные размеры шага ΔPdn(n+1) и ΔPup(n+1) можно определять на основании заданной функции ΔP(n) и rosib(n), например, подобной функции, выраженной группой уравнений (15). Переменные размеры шага можно определять пропорционально ΔP(n) и обратно пропорционально rosib(n). Вероятности корректировки и переменные размеры шага можно также определять по справочной таблице различных вероятностей и значений размера шага для различных значений ΔP(n) и rosib(n) или какими-либо другими методами.
На фиг.4А и 4В показаны, соответственно, примерные варианты корректировки мощности передачи вероятностным и детерминированным способом. В вероятностном варианте, показанном на фиг.4А, вероятность корректировки определяется на основании параметров ΔP(n) и rosib(n) и используются фиксированные повышающие и понижающие шаги для корректировки мощности передачи. В детерминированном варианте, показанном на фиг.4В, вероятность регулировки установлена на 1.0 и размеры повышающего и понижающего шага определяются на основании параметров ΔP(n) и rosib(n). В эти варианты можно также внести различные модификации. Например, переменные размеры повышающего и понижающего шагов можно использовать также и для вероятностного варианта. В другом примере можно использовать фиксированные повышающий и понижающий шаги для детерминированного варианта.
Дельту мощности ΔP(n) канала данных можно корректировать на основании значения OSI, усиления канала, предыдущей дельты мощности ΔP(n-1), интервала допустимых дельт мощности и максимального уровня мощности для терминала, как было описано выше. Обычно дельту мощности ΔP(n) можно корректировать на основании любого параметра или любой комбинации параметров. Другие параметры, которые можно использовать для корректировки ΔP(n), включают в себя текущую мощность передачи Pdсh(n), коэффициент потери мощности между пиковой и средней ΔPbo, "назначенную" группу секторов, которые потенциально могут наблюдать высокий уровень помех от данного терминала и т.п. Коэффициент потери мощности между пиковой и средней можно определить по количеству поднесущих, используемых терминалом для передачи, и можно использовать более высокое значение для ΔPbo, если для передачи используется больше поднесущих. Мощность передачи для канала данных может быть ограничена значением менее, чем Pmax минус этот коэффициент потери мощности, или Pdch(n)≤(Pmax-ΔPbo).
Мощность передачи для терминала можно также корректировать на основании других параметров, критериев и информации. Терминал может также корректировать мощность передачи на различные величины и/или различными способами на основании всей информации, имеющейся для секторов, которые следует учитывать для корректировки мощности передачи.
На фиг.5 показан механизм 500 управления мощностью, который можно использовать для корректировки мощности передачи для терминала 120х в системе 100. Терминал 120х осуществляет связь с обслуживающим сектором 110х и может создавать помехи для соседних секторов 110а-110m (хотя и различной величины). Механизм 500 управления мощностью включает в себя контрольный контур 510 и второй контур 520. Контрольный контур 510 действует между терминалом 120х и обслуживающим сектором 110х. Второй контур 520 действует между терминалом 120х и соседними секторами 110а-110m и, возможно, обслуживающим сектором 110х. Для простоты на фиг.5 показана только часть контуров 510 и 520, находящаяся в терминале 120х.
Контрольный контур 510 корректирует мощность передачи для канала управления (или какого-то другого канала трафика) и стремится поддерживать принятый SNR для этого канала управления, измеренный в обслуживающем секторе 110х, как можно ближе к целевому SNR. Для контрольного контура 510 обслуживающий сектор 110х оценивает принятое SNR для канала управления, сравнивает принятое SNR с целевым SNR и формирует команды управления мощностью передачи (ТРС) на основании результатов сравнения, как будет описано ниже. Каждая команда ТРС может быть либо (1) командой UP, предписывающей увеличить мощность передачи для канала управления, либо (2) командой DOWN, предписывающей уменьшить мощность передачи. Обслуживающий сектор 110х передает команды ТРС на прямой линии связи (облако 570) термину 120х.
Терминал 120х принимает и обрабатывает передачу по прямой линии связи из обслуживающего сектора 110х и передает "принятые" команды ТРС в процессор 542 команд ТРС. Каждая принятая команда ТРС представляет собой зашумленную версию команды ТРС, переданную обслуживающим сектором 110х. Процессор 542 обнаруживает каждую принятую команду ТРС и получает "решение ТРС", которое может быть (1) решением UP (повышение), если принятая ТРС команда является командой UP, или (2) решением DOWN (понижение), если принятая ТРС команда является командой DOWN. Блок 544 корректировки мощности передачи (ТХ) канала управления корректирует мощность передачи для канала управления, Pcch(n), на основании решений ТРС из процессора 542 команд ТРС. Например, блок 544 может повышать Pcch(n) на повышающий шаг ΔPcch,up для каждого решения UP и понижать Pcch(n) на понижающий шаг ΔPcch,dn для каждого решения DOWN. Процессор/модулятор 560 данных ТХ устанавливает мощность передачи для канала управления на уровень Pcch(n), указанный блоком 544. Передача на канале управления посылается в обслуживающий сектор 110х.
Из-за потерь на трассе распространения сигнала и эффектов многолучевого распространения на обратной линии связи (облако 540), которые типично изменяются во времени, особенно для мобильного терминала, принятое SNR для канала управления постоянно колеблется. Контрольный контур 510 стремится сохранить принятое SNR равным или близким целевому SNR в присутствии изменений в условиях канала обратной линии связи.
Второй контур 520 корректирует мощность передачи для канала данных (или какого-то другого канала трафика) таким образом, чтобы для канала данных использовался по возможности самый высокий уровень мощности, но при этом межсекторные и внутрисекторные помехи сохранялись в допустимых пределах. Для второго контура 520 процессор 552 значений OSI принимает и обрабатывает значения OSI, которые широковещательно передаются соседними секторами 110а-110m и, возможно, обслуживающим сектором 110х. Процессор 552 значений OSI передает обнаруженные значения OSI из секторов в блок 556 корректировки дельты мощности передачи. Оценщик 554 каналов принимает пилот-сигналы из обслуживающих и соседних секторов, оценивает усиление канала для каждого сектора и передает оценочные усиления канала для всех секторов в блок 556. Блок 556 определяет отношения усилений канала для соседних секторов и определяет самый сильный соседний сектор. Блок 556 корректирует свою дельту мощности передачи ΔP(n) для канала данных на основании либо объединенного значения OSI, либо объединенного значения OSI и отношения усилений канала для самого сильного соседнего сектора или объединенного отношения усилений каналов, как было описано выше. Блок 556 может реализовать процесс 300 или 400 и может корректировать ΔP(n) вероятностным или детерминированным методом, или как было описано в связи с фиг.4А. Обычно блок 556 может корректировать свою дельту мощности передачи ΔP(n) на основании детектированных значений OSI и/или другой подходящей информации для любого количества секторов, которые могут включать в себя обслуживающие и/или соседние секторы.
Блок 558 вычисления мощности передачи канала данных принимает мощность передачи канала управления Pcch(n), которая используется в качестве контрольного уровня мощности, Pref(n), и дельту мощности передачи, ΔP(n). Блок 558 вычисляет мощность передачи Pdch(n) для канала данных на основании Pcch(n) и ΔP(n). Блок 560 устанавливает мощность передачи для канала данных на уровень Pdch(n), указанный блоком 558. Передача на канале данных отправляется обслуживающему сектору 110х. Передачи на каналах данных и управления могут создавать помехи для соседних секторов 110а-110m.
Каждый сектор 110 принимает передачи от терминалов по обратной линии связи, оценивает помехи, наблюдаемые этим сектором, сравнивает измеренные помехи с номинальным порогом помех, устанавливает значение OSI соответственно на основании результата сравнения и широковещательно передает значение OSI по прямой линии связи.
Контрольный контур 510 и второй контур 520 могут действовать одновременно, но обновляться с различной скоростью, при этом контур 510 действует быстрее, чем контур 520. Скорости обновления этих двух контуров можно выбирать такими, чтобы обеспечить требуемое управление мощностью. Контрольный контур 510 может обновляться со скоростью, например, 150 раз в секунду, а второй контур может обновляться со скоростью, например, 10-20 раз в секунду. Контрольный контур 510 и второй контур 520 могут оперировать с передачами, отправленными по каналу управления и каналу данных, соответственно. Каналам управления и данных могут быть назначены различные поднесущие в каждом периоде скачкообразной перестройки, как показано на фиг.2. В этом случае контрольный контур 510 и второй контур 520 могут одновременно оперировать с передачами, отправленными на различных поднесущих. Канал управления может также мультиплексироваться с каналом данных (например, с помощью TDM и/или CDM) и передаваться на одних и тех же поднесущих.
На фиг.6 показан механизм 600 управления мощностью, который можно использовать для канала управления. Механизм 600 управления мощностью (который может использоваться для контрольного контура 510 на фиг.5) включает в себя внутренний контур 610, внешний контур 620 и третий контур 630. Внутренний контур 610 стремится сохранить принятое SNR для канала управления как можно ближе к целевому SNR. Для внутреннего контура 610 оценщик SNR 642 в обслуживающем секторе 110х оценивает принятое SNR для канала управления и передает принятое SNR в генератор 644 команд ТСР. Генератор 644 сравнивает принятое SNR с целевым SNR и генерирует команды ТРС на основании результатов сравнения. Обслуживающий сектор 110х передает команды ТРС по прямой линии связи (облако 570) терминалу 120х. Терминал 120х принимает и обрабатывает команды ТРС от обслуживающего сектора 110х и корректирует мощность передачи для канала управления, как было описано выше для фиг.5.
Данные можно отправлять в блоках на канале управления, и каждый блок данных можно кодировать блочным кодом для формирования соответствующего кодового слова (или кодированного блока данных). Для канала управления можно не использовать код обнаружения ошибок. В этом случае обслуживающий сектор может выполнять обнаружение стирания для каждого принятого кодового слова, чтобы определить, является ли данное кодовое слово стертым или нет. Стертое кодовое слово может рассматриваться как ненадежное и обрабатываться соответствующим образом (например, отбрасываться). Обнаружение стирания можно реализовать посредством вычисления метрики для каждого принятого кодового слова, сравнения вычисленной метрики с порогом стирания и объявления принятого кодового слова подлежащим или не подлежащим стиранию на основании результата сравнения.
Внешний контур 620 корректирует целевое SNR так, чтобы обеспечить целевую скорость стирания Prerasure для канала управления. Целевая скорость стирания указывает требуемую вероятность (например, 10%) объявления принятого кодового слова стертым. Блок 652 вычисления метрики вычисляет метрику для каждого принятого кодового слова. Детектор 654 стирания выполняет обнаружение стирания для каждого кодового слова на основании его вычисленной метрики и порога стирания и передает состояние принятого кодового слова (является ли оно стертым или не стертым) блоку 656 корректировки целевого SNR. Затем блок 656 корректирует целевое SNR для канала управления следующим образом:
 Уравнение (19)
Уравнение (19)
где SNRtarget(k) - целевое SNR для интервала обновления внешнего контура k;
ΔSNRup - размер повышающего шага для целевого SNR и
ΔSNRdn - размер понижающего шага для целевого SNR.
Размеры шага ΔSNRup и ΔSNRdn можно установить следующим образом:
 Уравнение (20)
Уравнение (20)
Третий контур 630 корректирует порог стирания таким образом, чтобы достичь целевой условной частоты ошибок Prerror для канала управления. Целевая условная частота ошибок показывает требуемую вероятность того, что принятое кодовое слово закодировано с ошибкой, когда оно признано не стертым. Низкая Prerror (например, 1%) соответствует высокой уверенности в результатах декодирования для нестертых кодовых слов. Терминал 110х и/или другие терминалы, осуществляющие связь с обслуживающим сектором 110х, могут передавать известные кодовые слова на канале управления периодически или при запуске. Блоки 652 и 654 выполняют обнаружение стирания для каждого принятого известного кодового слова так же, как и для принятого кодового слова. Для каждого принятого известного кодового слова, считающегося не стертым, декодер 662 декодирует принятое известное кодовое слово и определяет, является ли декодированный блок данных правильным или ошибочным. Декодер 662 формирует состояние каждого принятого известного кодового слова, которое может быть стертым, "удовлетворительным" или "неудовлетворительным". Удовлетворительное кодовое слово - это принятое известное кодовое слово, признанное нестертым и правильно декодированным. Неудовлетворительное кодовое слово - это принятое известное кодовое слово, считающееся нестертым, но декодированным с ошибкой. Блок 664 корректировки порога стирания корректирует порог стирания на основании состояния каждого принятого известного кодового слова следующим образом:
 Уравнение (21)
Уравнение (21)
где THerasure(l) - порог стирания для интервала l обновления третьего контура;
ΔTHup - размер повышающего шага для порога стирания и
ΔTHdn - размер понижающего шага для порога стирания.
Уравнение (21) построено на предположении, что более низкий порог стирания повышает вероятность того, что принятое кодовое слово будет объявлено стертым.
Размеры шага ΔTHup и ΔTHdn можно установить на основании следующего:
 Уравнение (22)
Уравнение (22)
Внутренний контур 610, внешний контур 620 и третий контур 630 обычно обновляются с различной скоростью. Внутренний контур самый быстрый из трех, и мощность передачи для канала управления может корректироваться с какой-то конкретной скоростью (например, 150 раз в секунду). Внешний контур 620 следующий по скорости, и целевое SNR может обновляться каждый раз, когда на канале управления принимается кодовое слово. Третий контур 630 самый медленный, и порог стирания может обновляться каждый раз, когда на канале управления принимается известное кодовое слово. Скорости обновления трех контуров можно выбирать так, чтобы достичь требуемого качества работы для обнаружения стирания и управления мощностью канала управления. Механизм 600 управления мощностью описан в совместно рассматриваемой заявке на патент США № 10/890717 на изобретение "Робастное обнаружение стирания и управление мощностью замкнутого контура на основании скорости стирания".
Для ясности, конкретные варианты изобретения были описаны выше для различных аспектов управления мощностью. Однако на основании этого описания можно также создать множество других вариантов. Некоторые их примеры приводятся ниже.
Можно использовать один и тот же интервал допустимых дельт мощности передачи [ΔPmin,ΔPmax] для всех терминалов в системе. Можно также использовать различные интервалы [ΔPmin,ΔPmax] для различных терминалов, например, в зависимости от их местонахождения. Например, терминалы с меньшим отношением усилений канала для самых сильных соседних секторов могут использовать меньший интервал дельт мощности передачи (например, такую же ΔPmin, но меньшую ΔPmax), чем терминалы, находящиеся ближе к обслуживающему сектору.
Контрольный уровень мощности Pref(n), используемый для определения мощности передачи канала данных Pdch(n), можно установить на мощность передачи другого управляемого мощностью канала, как было описано выше. Контрольный уровень мощности можно также определять другими методами, например, посредством оценки на основании усиления канала для обслуживающего сектора. Мощность передачи канала данных можно также корректировать прямо, а не через дельту мощности передачи. Обслуживающий сектор может передавать сигнал обратной связи для информирования терминала, находится ли мощность передачи этого канала данных в допустимых пределах.
Каждый сектор может широковещательно передавать информацию о своих помехах всем терминалам, если помехи, наблюдаемые этим сектором, рандомизированы, например, при скачкообразной перестройке частоты. Если секторы имеют более специфическую информацию о помехах, то мощности передачи терминалов можно корректировать с использованием этой информации. Например, каждому терминалу может быть назначена одна или более конкретных поднесущих для передачи данных (без скачкообразной перестройки частоты). При этом сектор может наблюдать различные количества помех на различных поднесущих. Терминалы, создающие большие помехи, можно конкретно идентифицировать на основании выделенных им поднесущих, и можно соответственно снизить мощности передачи этих терминалов.
Поддерживаемая скорость данных каждого терминала определяется по принятому SNR для этого канала данных. Принятое SNR для описанных выше вариантов зависит от (1) целевого SNR, связанного с контрольным уровнем мощности, и (2) дельты мощности передачи, ΔP(n), используемой данным терминалом. Дельта мощности передачи может автономно корректироваться терминалом без какого-либо ввода из обслуживающего сектора, как было описано выше. Терминал может послать дельту мощности передачи, принятое SNR для канала данных, поддерживаемую скорость данных для канала данных или эквивалентную информацию обслуживающему сектору. Терминал также может послать максимальное количество поднесущих, Nsb,max(n), которые он может поддерживать на текущей дельте мощности передачи, требуемое качество обслуживания (QoS), размер буфера и т.п. Для уменьшения количества сигнализации терминал может посылать ΔP(n) и Nsb,max(n) через каждые несколько интервалов обновления по внутриполосной сигнализации на канале данных и т.д.
Планировщик, находящийся в обслуживающем секторе или используемый для него, может использовать всю информацию, сообщаемую терминалом, для выделения ресурсов этому терминалу и планирования передачи данных терминалом на обратной линии связи. Планировщик может выделить терминалу Nsb,max(n) поднесущих, меньше, чем Nsb,max(n) поднесущих или больше, чем Nsb,max(n) поднесущих. Если планировщик выделяет больше, чем Nsb,max(n) поднесущих, то терминал может соответственно уменьшить дельты мощности передачи. Например, если выделено 2Nsb,max поднесущих, то ΔP(n) можно уменьшить вдвое.
Управление мощностью может осуществляться каждым терминалом на основании различных частей информации, которые терминал получил из своего обслуживающего сектора и соседних секторов, как было описано выше. Управление мощностью может также выполняться каждым сектором для всех терминалов, осуществляющих связь с данным сектором. Например, каждый сектор может получать отчет о помехах (например, значение OSI) для каждого соседнего сектора, например, через сигнализацию между секторами или передачи от терминалов. Каждый сектор может получать усиления канала, определенные каждым терминалом, для обслуживающих и соседних секторов. Каждый сектор может затем вычислить дельту мощности передачи для каждого терминала на основании отчетов о помехах и усилений канала, применимых к этому терминалу, и может отправить дельту мощности передачи терминалу. Затем каждый терминал может скорректировать свою мощность передачи, используя дельту мощности передачи, принятую из обслуживающего сектора. Альтернативно, каждый сектор может вычислить и отправить мощность передачи каждому терминалу. Наличие дельт мощности передачи для всех терминалов, осуществляющих связь с каждым сектором, может ускорить планирование для терминалов.
Описанные методы можно использовать для управления мощностью различных видов трафика (например, каналов данных и управления). Эти методы также хорошо подходят для гибридного протокола автоматического запроса на повторную передачу (H-ARQ). В H-ARQ каждый закодированный пакет делится на множество подблоков (Nbl), и для закодированного пакета передается один подблок за один раз. Когда каждый подблок для данного закодированного пакета принимается по обратной линии связи, обслуживающий сектор пытается декодировать и восстановить этот пакет на основании всех подблоков, принятых до этого времени для данного пакета. Обслуживающий сектор способен восстановить пакет на основании частичной передачи, потому что подблок содержит избыточную информацию, которая полезна для декодирования, когда принятое SNR низкое, но может не понадобиться, когда принятое SNR высокое. Обслуживающий сектор передает подтверждение (ACK), если пакет декодирован правильно, и терминал может закончить передачу пакета раньше после приема ACK.
В H-ARQ каждый закодированный пакет может передаваться в течение различного количества времени, пока он не будет правильно декодирован. Обычный механизм управления мощностью, который корректирует принятое SNR для канала данных на основании частоты ошибок в пакетах (PER), уменьшает мощность передачи для канала данных до низкого уровня таким образом, чтобы достичь целевой PER со всеми Nbl подблоками, переданными для каждого закодированного пакета. Это может сильно уменьшить пропускную способность системы. Предложенные методы позволяют использовать высокий уровень мощности передачи даже при передаче с переменной продолжительностью, поддерживаемой H-ARQ.
На фиг.7 показана схема варианта выполнения терминала 120х, обслуживающего сектора 110х и соседнего сектора 110а. На обратной линии связи в терминале 120х процессор данных ТХ 710 обрабатывает (например, кодирует, перемежает и модулирует) данные трафика обратной линии связи (RL) и формирует модуляционные символы для данных трафика. Процессор данных ТХ 710 также обрабатывает управляющие данные (например, индикатор качества канала) из контроллера 720 и формирует модуляционные символы для управляющих данных. Модулятор (MOD) 712 обрабатывает модуляционные символы для данных трафика и управления и контрольные символы и формирует последовательность комплекснозначных чипов. Обработка процессором 710 данных ТХ и модулятором 712 зависит от системы. Модулятор 712 выполняет ОFDM модуляцию, если в системе используется ОFDM. Передающий блок (TMTR) 714 приводит последовательность чипов к требуемым условиям (например, преобразует в аналоговую форму, усиливает, фильтрует и преобразует с повышением частоты) и формирует сигнал обратной линии связи, который маршрутизируется через дуплексер (D) 716 и передается через антенну 718.
В обслуживающем секторе 110х сигнал обратной линии связи от терминала 120х принимается антенной 752х, маршрутизируется через дуплексер 754х и передается в приемный блок (RCVR) 756х. Приемный блок 756х приводит принятый сигнал к требуемым условиям (например, фильтрует, усиливает и преобразует с понижением частоты) и затем оцифровывает подготовленный сигнал для получения потока выборок данных. Демодулятор (DEMOD) 758х обрабатывает выборки данных для получения оценок символов. Процессор принятых данных (RX) 760х затем обрабатывает (например, обратно перемежает и декодирует) оценки символов для получения декодированных данных для терминала 120х. Процессор данных RX 760х также выполняет обнаружение стирания и передает контроллеру 770х состояние каждого принятого кодового слова, использованного для управления мощностью. Обработка демодулятором 758х и процессором данных RX 760х является дополнительной к обработке, выполняемой модулятором 712 и процессором данных ТХ 710, соответственно.
Обработка передачи на прямой линии данных может выполняться аналогично обработке, описанной выше для обратной линии связи. Обработка передач на прямой и обратной линиях связи обычно задается системой.
Для управления мощностью на обратной линии связи в обслуживающем секторе 110х оценщик SNR 774х оценивает принятое SNR для терминала 120х и передает принятое SNR в генератор 776х команд ТРС (cmd). Генератор 776х также принимает целевое SNR и формирует команды ТРС для терминала 120х. Команды ТРС обрабатываются процессором данных ТХ 782х и модулятором 784х, приводятся к требуемым условиям передающим блоком 786х, маршрутизируются через дуплексер 754х и передаются через антенну 752х терминалу 120х. В соседнем секторе 110а оценщик помех 774а оценивает помехи, наблюдаемые данным сектором, и передает измеренные помехи в генератор значения OSI 776а. Генератор 776а также принимает номинальный порог помех и формирует значение OSI для сектора 110а. Значение OSI обрабатывается и широковещательно передается терминалам в системе. Генератор 776а может также сформировать бит тревоги или какой-либо другой тип отчета о помехах.
В терминале 120х сигналы прямой линии связи от обслуживающих и соседних секторов принимаются антенной 718. Принятый сигнал маршрутизируется через дуплексер 716, приводится к требуемым условиям и оцифровывается приемным блоком 740 и обрабатывается демодулятором 742 и процессором 744 данных RX для получения принятых команд ТРС и принятых значений OSI. Оценщик каналов в демодуляторе 742 оценивает усиление канала для каждого сектора. Процессор ТРС 724 обнаруживает принятые команды ТРС для получения решений ТРС, которые используются для обновления мощности передачи для канала управления. Процессор ТРС 724 также корректирует мощность передачи для канала данных на основании принятых значений OSI для соседних секторов, усилений канала для обслуживающего и соседних секторов и мощности передачи для каналов данных и управления, как было описано выше. Процессор ТРС 724 (или контроллер 720) может использовать процесс 300, изображенный на фиг.4А, или процесс 400, изображенный на фиг.4В. Процессор ТРС 724 передает сигналы управления корректировкой мощности передачи для каналов управления и данных. Процессор 710 и/или модулятор 712 принимают сигналы управления от процессора ТРС 724 и регулируют мощности передачи для каналов управления и данных.
Контроллеры 720, 770х и 770а управляют работой различных блоков обработки в терминале 120х и секторах 110х и 110а, соответственно. Эти контроллеры могут также выполнять различные функции управления мощностью на обратной линии связи. Например, контроллеры 720 и 770х могут реализовать узлы обработки, показанные на фиг.5 и 6, для терминала 120х и сектора 110х, соответственно, и процессы, описанные со ссылкой на фиг.3, 4А и 4В. Запоминающие устройства 722, 772х и 772а хранят данные и программные коды, соответственно, для контроллеров 720, 770х и 770а. Планировщик 780х планирует передачи данных терминалами обслуживающему сектору 110х и от него.
Описанные способы управления мощностью могут быть реализованы различными средствами. Например, они могут быть реализованы с помощью аппаратных средств, программных средств или их комбинации. При аппаратной реализации блоки обработки, используемые для управления мощностью, могут быть реализованы в одной или более специализированных интегральных схемах (СИС), процессорах цифровых сигналов (ПЦС), устройствах цифровой обработки сигналов (УЦОС), программируемых логических устройствах (ПЛУ), вентильных матрицах с эксплуатационным программированием (ВМЭП), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных узлах, предназначенных для выполнения описанных функций, или в их комбинациях.
При программной реализации методы управления мощностью можно реализовать с помощью модулей (например, процедур, функций и т.п.), которые выполняют описанные функции. Программные коды могут храниться в запоминающем устройстве (например, запоминающем устройстве 722 на фиг.7) и исполняться процессором (например, контроллером 720). Запоминающее устройство может быть реализовано в процессоре или может быть внешним, при этом оно может быть подключено с возможностью обмена данными к процессору через различные средства, известные в области связи.
Представленное выше описание вариантов осуществления изобретения позволит осуществить или использовать настоящее изобретение любому специалисту в области связи. Для специалистов будут очевидными различные модификации этих вариантов, и описанные общие принципы можно применить в других вариантах, не выходя за рамки объема притязаний изобретения. Таким образом, настоящее изобретение не ограничено описанными вариантами, а имеет самый широкий объем в соответствии с раскрытыми принципами и новыми существенными признаками.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ ПОМЕХОЙ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2452117C2 |
| УПРАВЛЕНИЕ ПОМЕХОЙ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2390954C2 |
| РЕГУЛИРОВАНИЕ МОЩНОСТИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ ОРТОГОНАЛЬНОЕ МУЛЬТИПЛЕКСИРОВАНИЕ | 2005 |
|
RU2349033C2 |
| УПРАВЛЕНИЕ ПОМЕХОЙ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2395168C2 |
| УПРАВЛЕНИЕ ПОМЕХОЙ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2010 |
|
RU2504925C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОРРЕКТИРОВОК ДЛЯ УПРАВЛЕНИЯ МОЩНОСТЬЮ НА ОСНОВЕ ДЕЛЬТА-ЗНАЧЕНИЯ В БЕСПРОВОДНЫХ СИСТЕМАХ СВЯЗИ | 2011 |
|
RU2479924C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОРРЕКТИРОВОК ДЛЯ УПРАВЛЕНИЯ МОЩНОСТЬЮ НА ОСНОВЕ ДЕЛЬТА-ЗНАЧЕНИЯ В БЕСПРОВОДНЫХ СИСТЕМАХ СВЯЗИ | 2007 |
|
RU2420879C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЗАИМОДЕЙСТВИЯ БЫСТРОЙ ПОМЕХИ ОТ ДРУГОГО СЕКТОРА (OSI) С МЕДЛЕННОЙ OSI | 2007 |
|
RU2419974C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ БЫСТРОЙ ПОМЕХИ ОТ ДРУГОГО СЕКТОРА (OSI) | 2007 |
|
RU2439825C2 |
| СПОСОБ ОПТИМИЗАЦИИ ЧАСТЕЙ КАДРА | 2005 |
|
RU2358391C2 |
Изобретение относится к области связи. Предложены способы корректировки мощности передачи для уменьшения как внутрисекторных помех для обслуживающей базовой станции, так и межсекторных помех для соседних базовых станций. Это может быть достигнуто посредством объединения информации о помехах от множества базовых станций. Техническим результатом является уменьшение влияния помех, которые бы позволили повысить качество работы. 3 н. и 30 з.п. ф-лы, 8 ил.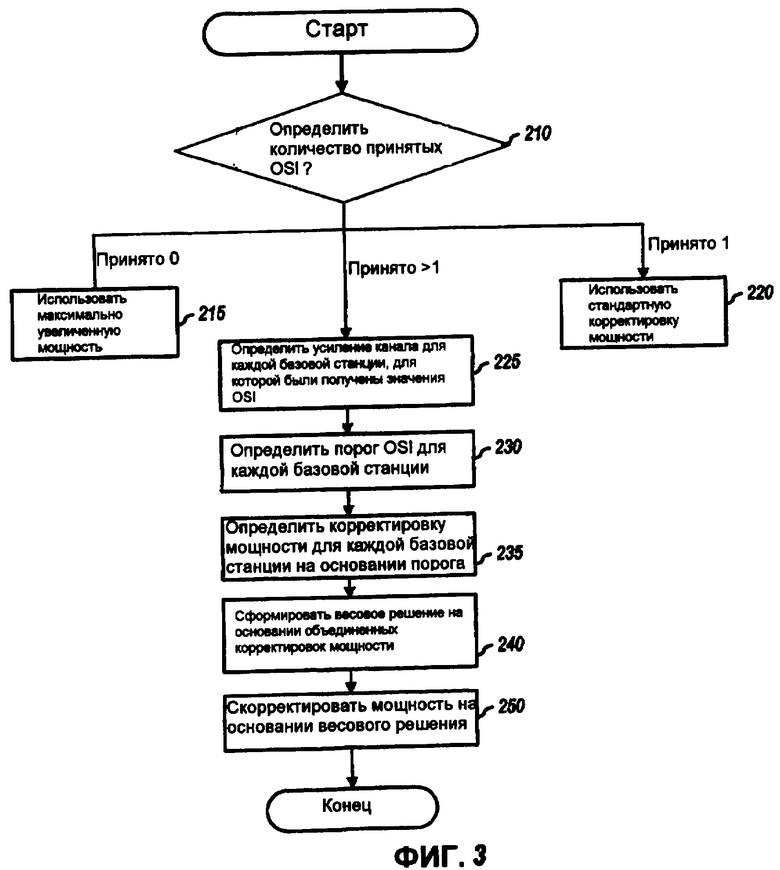
1. Способ осуществления управления мощностью беспроводного терминала обслуживающим сектором, заключающийся в том, что
получают по меньшей мере для двух секторов индикацию помех, наблюдаемых данным сектором, причем каждый сектор является либо соседним сектором, не назначенным для приема передачи данных, отправленной беспроводным терминалом, либо обслуживающим сектором, назначенным для приема передачи данных, отправленной беспроводным терминалом,
объединяют каждую индикацию помех, полученную из упомянутых по меньшей мере двух секторов, индикация содержит первый бит, показывающий, находятся ли помехи, наблюдаемые данным сектором, выше или ниже первого порога помех; и
корректируют мощность передачи для передачи данных на основании объединенных индикаций.
2. Способ по п.1, в котором индикация дополнительно содержит второй бит, показывающий, превышают ли помехи, наблюдаемые данным сектором, второй порог помех, который выше, чем первый порог помех.
3. Способ по п.1, в котором при объединении присваивают весовой коэффициент каждой индикации.
4. Способ по п.3, в котором при присвоении весового коэффициента весовой коэффициент присваивают на основании отношения усилений канала для каждого сектора относительно обслуживающего сектора.
5. Способ по п.4, в котором обслуживающим сектором является обслуживающий сектор обратной линии связи.
6. Способ по п.4, в котором дополнительно определяют пороговое значение для каждой индикации, и при присвоении весового коэффициента присваивают весовой коэффициент каждому пороговому значению согласно отношению усилений канала.
7. Способ по п.4, в котором усиления каналов для каждого из по меньшей мере двух секторов и обслуживающих секторов оценивают на основании пилот-сигналов, полученных, соответственно, из этих секторов.
8. Способ по п.4, в котором при корректировке мощности передачи осуществляют корректировку на основании объединенной индикации и вероятности.
9. Способ по п.8, в котором дополнительно определяют вероятность повышающей или понижающей корректировки мощности передачи на основании отношений усилений канала для каждого из упомянутых по меньшей мере двух секторов.
10. Способ по п.9, в котором вероятность определяют также на основании текущего уровня мощности передачи для передачи данных.
11. Способ по п.9, в котором мощность передачи корректируют шагами, имеющими фиксированный размер, в соответствии с определенной вероятностью.
12. Способ по п.4, в котором дополнительно определяют размер шага корректировки мощности передачи на основании вычисленных отношений усилений канала, причем корректировку осуществляют на основании объединенных индикаций и размера шага.
13. Способ по п.12, в котором размер шага определяют также на основании текущего уровня мощности передачи для упомянутой передачи данных.
14. Устройство для осуществления управления мощностью беспроводного терминала, содержащее
процессор, выполненный с возможностью получения для по меньшей мере двух секторов индикации помех, наблюдаемых данным сектором, причем индикация содержит первый бит, показывающий, находятся ли помехи, наблюдаемые данным сектором, выше или ниже первого порога помех, причем каждый сектор является либо соседним сектором, не назначенным для приема передачи данных, отправленной упомянутым беспроводным терминалом, либо обслуживающим сектором, назначенным для приема передачи данных, отправленной упомянутым беспроводным терминалом, и корректировки мощности передачи для передачи данных на основании объединения каждой индикации помех, принятой из упомянутых по меньшей мере двух секторов, и
запоминающее устройство, связанное с процессором.
15. Устройство по п.14, в котором индикация дополнительно содержит второй бит, показывающий, превышают ли помехи, наблюдаемые данным сектором, второй порог помех, который выше, чем первый порог помех.
16. Устройство по п.14, в котором процессор выполнен с возможностью объединения посредством присвоения весового коэффициента каждой индикации.
17. Устройство по п.16, в котором процессор выполнен с возможностью присвоения весового коэффициента на основании отношения усилений канала для каждого сектора относительно обслуживающего сектора.
18. Устройство по п.17, в котором обслуживающим сектором является обслуживающий сектор обратной линии связи.
19. Устройство по п.17, в котором процессор выполнен с возможностью определения порогового значения для каждой индикации и присвоения весового коэффициента каждому пороговому значению согласно отношению усилений канала.
20. Устройство по п.17, в котором процессор выполнен с возможностью корректировки мощности передачи на основании объединенной индикации и вероятности.
21. Устройство по п.20, в котором процессор выполнен с возможностью определения вероятности повышающей или понижающей корректировки мощности передачи на основании отношений усилений каналов для каждого из упомянутых по меньшей мере двух секторов.
22. Устройство по п.21, в котором процессор выполнен с возможностью определения вероятности на основании текущего уровня мощности передачи для передачи данных.
23. Устройство по п.21, в котором процессор выполнен с возможностью корректировки мощности передачи шагами, имеющими фиксированный размер, в соответствии с упомянутой определенной вероятностью.
24. Устройство по п.21, в котором процессор выполнен с возможностью определения размера шага и корректировки на основании объединенных индикаций и размера шага.
25. Устройство по п.24, в котором процессор выполнен с возможностью определения размера шага на основании текущего уровня мощности передачи для передачи данных.
26. Устройство для осуществления управления мощностью беспроводного терминала в системе беспроводной связи, содержащее
средство для получения для по меньшей мере двух секторов индикации помех, наблюдаемых данным сектором, причем индикация содержит первый бит, показывающий, находятся ли помехи, наблюдаемые данным сектором, выше или ниже первого порога помех, причем каждый сектор является либо соседним сектором, не назначенным для приема передачи данных, отправленной данным беспроводным терминалом, либо обслуживающим сектором, назначенным для приема передачи данных, отправленной данным беспроводным терминалом,
средство для объединения каждой индикации помех, принятой из упомянутых по меньшей мере двух секторов, и
средство для корректировки мощности передачи для передачи данных на основании объединенных индикаций.
27. Устройство по п.26, в котором индикация дополнительно содержит второй бит, показывающий, превышают ли помехи, наблюдаемые данным сектором, второй порог помех, который выше, чем первый порог помех.
28. Устройство по п.26, в котором средство для объединения содержит средство для присвоения весового коэффициента каждой индикации.
29. Устройство по п.28, в котором средство для присвоения весового коэффициента содержит средство для присвоения весового коэффициента на основании отношения усилений каналов для каждого сектора относительно обслуживающего сектора.
30. Устройство по п.29, дополнительно содержащее средство для определения порогового значения для каждой индикации, а средство для присвоения весового коэффициента содержит средство для присвоения весового коэффициента каждому пороговому значению согласно отношению усилений каналов.
31. Устройство по п.29, дополнительно содержащее средство для вычисления усилений канала на основании полученных пилот-сигналов.
32. Устройство по п.29, в котором средство для корректировки мощности передачи содержит средство для корректировки на основании объединенной индикации и вероятности.
33. Устройство по п.29, в котором средство для корректировки мощности передачи содержит средство для определения размера шага корректировки мощности передачи на основании вычисленных отношений усилений каналов и корректировки на основании объединенных индикаций и размера шага.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| RU 95105526 A, 20.12.1997 | |||
| US 6519705 В1, 11.02.2003 | |||
| Устройство для поштучной выдачи гвоздей | 1986 |
|
SU1315310A1 |

