Настоящая заявка является окончательной заявкой, притязающей на приоритет предварительной патентной заявки США №60/461756 от 11 апреля 2003 г., озаглавленной “System and Method for Fluid Power Control of Reverse Link Communication”.
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к области сетей связи, в частности к системам и способам для улучшения производительности передачи данных в беспроводных системах связи.
В характерной беспроводной системе связи для передачи голосового трафика и трафика данных базовая станция связана с зоной покрытия. Эта зона называется сектором. Мобильные станции, находящиеся в пределах сектора, могут передавать данные базовой станции и принимать данные от базовой станции. В контексте передачи данных базовые станции могут называться сетями доступа (также называемые точками доступа), и мобильные станции могут называться терминалами доступа. Терминалы доступа могут одновременно связываться с более чем одной сетью доступа, и когда терминал доступа перемещается, набор сетей доступа, с которыми он связан, может изменяться.
Параметры для связи между определенной сетью доступа и определенным терминалом доступа частично базируются на их относительном положении и качестве и силе сигналов, которые передаются и принимаются ими, соответственно. Например, когда терминал доступа удаляется от сети доступа, сила сигнала, принимаемого терминалом доступа от сети доступа, может уменьшаться. Соответственно, частота появления ошибок в полученных данных будет возрастать. Таким образом, сеть доступа, как правило, компенсирует увеличение расстояния уменьшением скорости, на которой передаются данные терминалу доступа. Это позволяет терминалу доступа принимать и декодировать сигнал от сети доступа с меньшим количеством ошибок. Когда терминал доступа приближается к сети доступа, сила сигнала увеличивается, соответственно, более высокая скорость передачи данных может быть использована для передачи данных терминалу доступа.
Аналогичным образом, когда терминал доступа удаляется от сети доступа, сила сигнала, принимаемого сетью доступа от терминала доступа, может уменьшаться, что потенциально приводит к более высокой частоте появления ошибок. Так же как и сеть доступа, терминал доступа может компенсировать увеличение расстояния уменьшением скорости передачи данных, что позволит сети доступа принимать сигнал с меньшим количеством ошибок. Терминал доступа может также увеличить его выходную мощность для уменьшения частоты появления ошибок, если такой запрос поступил от сети доступа. Снова, когда терминал доступа приближается к сети доступа, более сильный сигнал может поддерживать более высокую скорость передачи данных.
В одной системе терминал доступа отвечает за определение скорости, с которой будут передаваться данные от терминала доступа к сети доступа. Эта скорость определяется на основе нескольких факторов. Первичными факторами являются абсолютная максимальная скорость, на которой терминал доступа и сеть доступа могут связываться, максимальная скорость, основанная на допустимой выходной мощности терминала доступа, максимальная скорость, подтвержденная количеством данных, которые терминал доступа имеет в очереди, и максимальная скорость, допустимая на основе ограничений по нарастанию. В этой системе каждая из этих скоростей представляет жесткое ограничение, которое не может быть превышено выбранной скоростью передачи данных. Другими словами, выбранная скорость передачи данных не превышает минимальной из этих четырех скоростей.
Первые две из этих скоростей (абсолютная и ограниченная по мощности максимальная скорости) вытекают из физических ограничений системы и не контролируются терминалом доступа. Третья и четвертая скорости (подстраиваемая по данным скорость и скорость, ограниченная по нарастанию) являются переменными и динамически определяются на основе определенных превалирующих условий в терминале доступа.
Подстраиваемая по данным скорость является по существу максимальной скоростью, которая может быть подтверждена по количеству данных, которые находятся в очереди для передачи терминалом доступа. Например, если терминал доступа имеет 1000 бит в его очереди на передачу, то скорость передачи данных в 38,4 килобайт в секунду (1024 бит/кадр) является подтвержденной, а скорость передачи данных в 78,6 килобайт в секунду (2048 бит/кадр) не является подтвержденной. Если в очереди на передачу терминала доступа нет данных, то никакая скорость передачи не может быть подтверждена.
Скорость, ограниченная по нарастанию, есть максимальная скорость, которая разрешена, принимая во внимание тот факт, что быстрое нарастание скорости будет внезапно увеличивать интерференцию, воспринимаемую другими терминалами доступа, и будет ухудшать их производительность. Если нарастание для каждого терминала доступа ограничено, то уровень интерференции, который они вызывают, будет изменяться более медленно и другие терминалы доступа смогут более просто подстроить их рабочие скорости передачи данных и мощности передачи, чтобы адаптироваться к нарастающей интерференции. Необходимо отметить, что скорость, ограниченная по нарастанию, также вычисляется для управления уменьшением скоростей передачи данных. Общий эффект заключается в том, чтобы минимизировать широкие и/или быстрые флуктуации в скоростях передачи данных и тем самым стабилизировать общую работу сети доступа и терминалов доступа в системе.
В то время как изменения в скорости, ограниченной по нарастанию, контролируются (в отношении обеих увеличивающейся и уменьшающейся скорости передачи данных), подстраиваемая по данным скорость нет. Если терминал доступа внезапно имеет достаточно данных для подтверждения очень высокой скорости передачи данных, подстраиваемая по данным скорость внезапно увеличивается. Если данные на терминале доступа заканчиваются, то подстраиваемая по данным скорость внезапно уменьшается до нуля. Внезапное увеличение подстраиваемой по данным скорости, как правило, не представляет проблем, так как контролируется скорость, ограниченная по нарастанию. Так как минимум из четырех скоростей, упомянутых выше, устанавливает максимум для выбранной скорости передачи данных, скорость, ограниченная по нарастанию, будет управлять в этой ситуации. Внезапное уменьшение подстраиваемой по данным скорости будет, тем не менее, вызывать падение реальной скорости передачи данных, так как подстраиваемая по данным скорость меньше, чем другие скорости, и будет, тем самым, осуществлять управление (принимая во внимание, что скорость передачи данных, выбранная для передачи данных в следующем кадре, есть минимум из четырех скоростей).
В системах предыдущего уровня техники, если терминал доступа не имел данных для передачи, то никаких данных не передавалось. Это интуитивно понятно, и традиционный опыт говорит, что полезная полоса пропускания не должна засоряться передачей бесполезных данных. Одна из проблем, которые возникают из разрешения скорости передачи данных стремительно падать (например, до нуля), заключается в том, что требуется некоторое количество времени на увеличение скорости передачи данных до прежнего значения, как было объяснено выше. Задержки в передаче некоторых данных могут приводить к падению и к последующему увеличению скорости передачи данных. Эти задержки, как правило, вероятны в случае пульсирующих данных или данных, имеющих дискретные процессы прибытия. Одним из таких типов данных является видео в реальном времени, которое может содержать пакеты в 500-1000 байт, которые прибывают в очередь на передачу с дискретными интервалами в 60-70 миллисекунд. Видео в реальном времени так же является характерным примером типа данных, для которого задержки в передаче сильно заметны и таким образом неприемлемы. Сетевые игры являются еще одним классом приложений, где прибытие данных является случайным и задержка данных является ключевой метрикой производительности. Таким образом, существует необходимость в способе и устройстве для адаптивного определения скорости передачи данных для быстрого нарастания скорости передачи данных, с минимизацией нежелательных эффектов в системе связи.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Переменная состояния, называемая изменяющимся уровнем мощности, определена для каждого терминала доступа. Изменяющийся уровень мощности - это непрерывный уровень мощности, который является целевым уровнем мощности, который учитывает загрузку сектора. Действительные передачи происходят на дискретных уровнях мощности, допускаемых физическим уровнем, но может быть достигнуто сглаживание по этим дискретным уровням среднего уровня мощности, равного изменяющемуся уровню мощности. Таким образом, текущее состояние передачи каждого терминала доступа представляется непрерывной переменной, а не дискретной скоростью как обычно. Это делает возможным плавное варьирование средней мощности передачи, когда терминал доступа увеличивает его мощность, для того чтобы использовать преимущества недогруженной емкости системы. В результате, терминалом доступа используются простые детерминистические величины нарастания мощности, а не вероятностные дискретные скачки, которые уменьшают вариацию в производительности и улучшают управляемость системы.
В одном аспекте, способ для определения скорости передачи для передачи данных в системе с обратной связью от терминала доступа включает в себя этапы, на которых получают бит обратной активности, передают бит обратной активности цифровому фильтру для получения фильтрованного бита обратной активности, определяют изменяющийся уровень мощности на основе фильтрованного бита обратной активности и определяют скорость передачи данных на основе изменяющегося уровня мощности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие цели и преимущества настоящего изобретения станут очевидными по прочтении нижеследующего описания со ссылкой на сопроводительные чертежи.
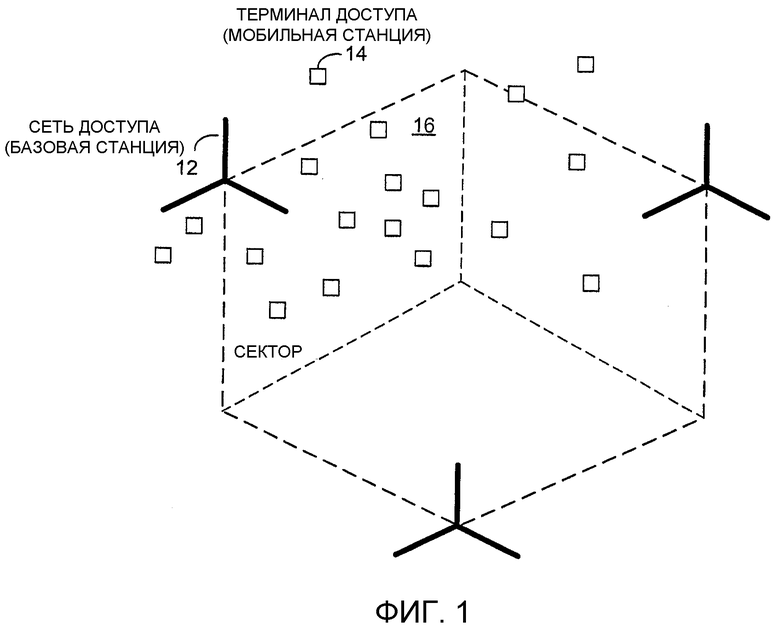
Фиг.1 - диаграмма, иллюстрирующая часть беспроводной коммуникационной системы, способной функционировать в соответствии с реализацией.
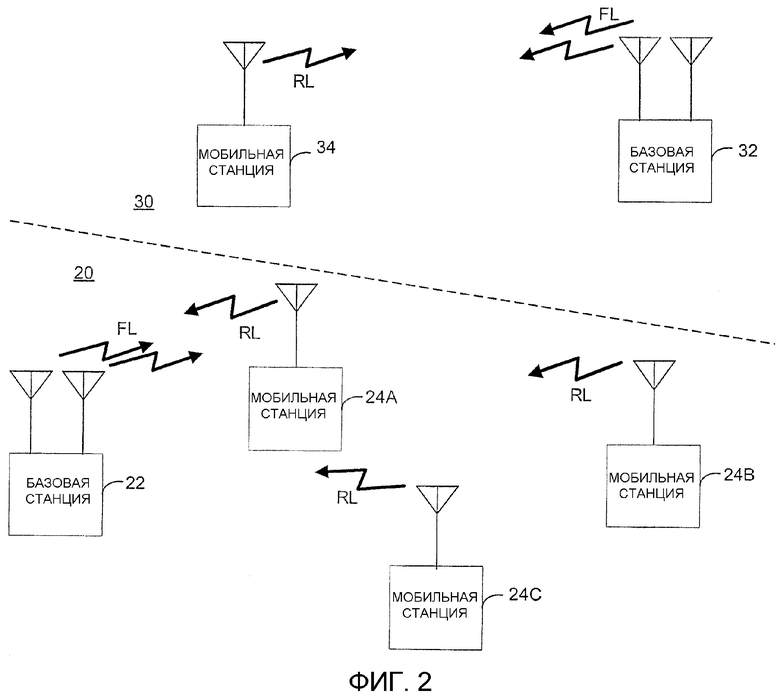
Фиг.2 - более подробная диаграмма, иллюстрирующая сети доступа и терминалы доступа в двух соседних секторах беспроводной коммуникационной системы, способной функционировать в соответствии с реализацией.
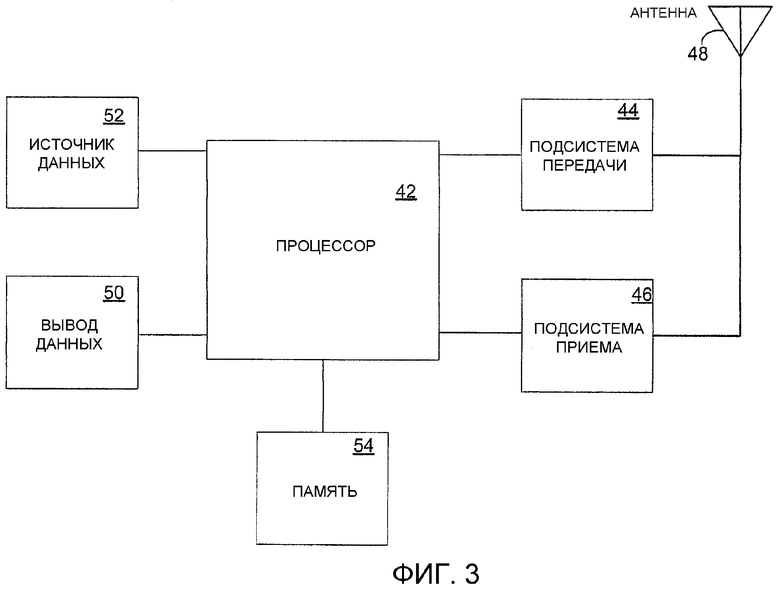
Фиг.3 - функциональная блок-схема, иллюстрирующая структуру терминала доступа, способного функционировать в соответствии с реализацией.
Фиг.4 - схема последовательности операций для определения скорости передачи данных по обратному каналу связи в соответствии с реализацией.
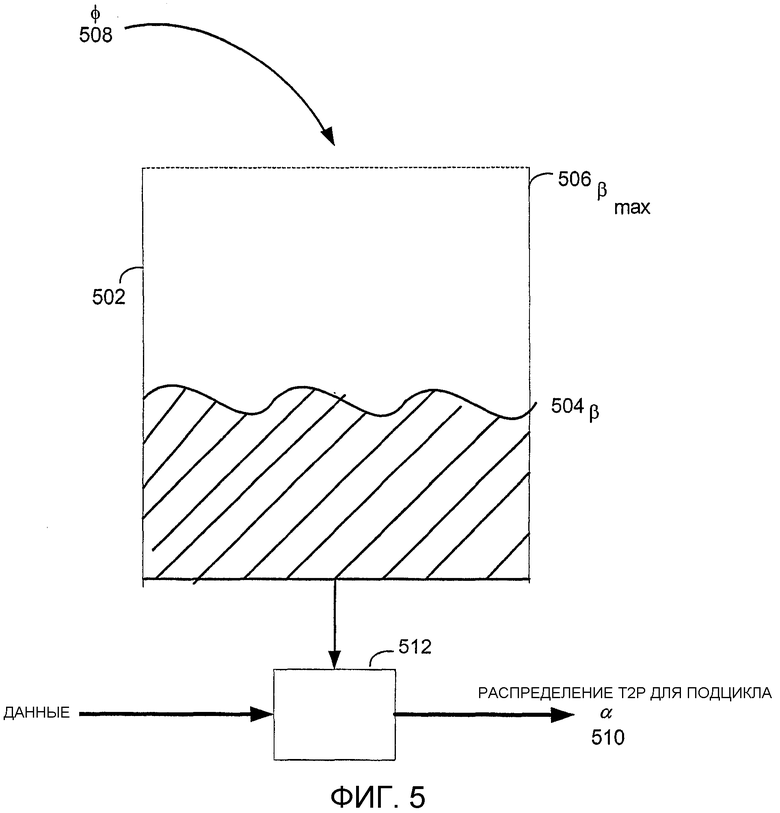
Фиг.5 - иллюстрация концепции приемника маркеров в соответствии с реализацией.
Фиг.6 - блок-схема генерации быстрого бита обратной активности (QRAB) и фильтрованного бита обратной активности (FRAB) в соответствии с реализацией.
Хотя изобретение является предметом различных модификаций и альтернативных форм, конкретные его реализации показаны в качестве примера на чертежах и в сопроводительном детальном описании. Тем не менее, должно быть понятно, что чертежи и детальное описание не предназначены для ограничения изобретения к конкретной реализации, описанной здесь. Напротив, это раскрытие изобретения предназначено для охвата всех модификаций, эквивалентов и альтернатив, попадающих в пределы объема настоящего изобретения, который определен нижеследующей формулой изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Говоря в общем смысле, изобретение включает в себя системы и способы для улучшения производительности передачи данных в беспроводной системе связи с помощью управления увеличением и уменьшением в скорости передачи данных по обратному каналу связи.
На Фиг.1 представлена диаграмма, иллюстрирующая часть беспроводной коммуникационной системы в соответствии с одной реализацией. В этой реализации система состоит из множества сетей 12 доступа и множества терминалов 14 доступа. Каждая сеть 12 доступа связывается с терминалами 14 доступа в близлежащей области. Терминалы доступа могут перемещаться в переделах сектора, или они могут перемещаться из сектора, связанного с одной сетью доступа, в другой сектор, связанный с другой сетью доступа. Зона покрытия есть сектор 16. Хотя, в действительности сектора могут быть в чем-то нерегулярны и могут перекрываться с другими секторами, они обозначены на чертеже как разделенные пунктирными и штриховыми линиями. Следует отметить, что для простоты, только одна из всех сетей доступа, терминалов доступа и секторов обозначены ссылочным номером.
На Фиг.2 представлена более подробная диаграмма, иллюстрирующая сети доступа и терминалы доступа в двух соседних секторах беспроводной коммуникационной системы в одной реализации. В этой системе сектор 20 включает в себя сеть 22 доступа и несколько терминалов 24 доступа. Сектор 30 включает в себя сеть 32 доступа и единственный терминал 34 доступа. Сети 22 и 32 доступа передают данные терминалам 24 и 34 доступа через то, что здесь называется прямым каналом связи (FL). Терминалы 2 и 34 доступа передают данные назад к сетям 22 и 32 через то, что здесь называется обратным каналом связи (RL).
В системах с множественным доступом с кодовым разделением каналов (CDMA), которые согласуются с стандартом “TIA/EIA/IS-95 Mobile Station-Based Compatibility Standard for Dual Mode Wideband Spread Spectrum Cellular System” (IS-95), пакеты данных могут быть переданы через FL. Методика для передачи через FL описана в патенте США №08/963386, озаглавленном “Method and Apparatus for High Rate Packet Data Transmission” от 3 ноября 1997 г. Для примера, пакет данных может содержать предопределенное количество блоков данных, где каждый блок идентифицируется порядковым номером. При некорректном приеме одного или более блоков данных мобильной станцией мобильная станция может отправить отрицательное уведомление (NACK) по RL ACK каналу, содержащее порядковые номера пропущенных блоков данных, для повторной передачи с базовой станции. Базовая станция принимает NACK сообщение и может повторно передать блоки данных, полученные с ошибками.
Автоматический запрос на повторение (ARQ) относится к протоколу, в котором получатель спрашивает передатчик о повторной отправке данных. После успешного декодирования первой половины кадра AN может отправить уведомительное сообщение (ACK) к AT для того, чтобы обозначить, что AN успешно декодировала данные, полученные в первой половине кадра. При неудачном декодировании первой половины кадра AN может отправить отрицательное уведомительное сообщение (NAK) к AT для того, чтобы обозначить, что AN не декодировала успешно данные, полученные в первой половине кадра. Методика для RL ARQ описана в патентной заявке США №10/280,740, озаглавленной “Reverse Link Automatic Repeat Request” от 24 октября 2002 г., принадлежащей заявителю настоящего изобретения.
ACK - это сообщение, передаваемое для обозначения того, что некоторые данные были приняты правильно. Как правило, если отправитель не получает ACK сообщения после некоторого предопределенного времени, или получает NAK, исходные данные будут отправлены повторно.
NAK - это сообщение, передаваемое для обозначения того, что некоторые данные были приняты неправильно, например данные могут иметь ошибку контрольной суммы. Альтернативой отправки NAK является использование только ACK сообщений, в этом случае неполучение ACK после определенного времени рассматривается как NAK. Здесь термин NAK означает или прием NAK сообщения, или неприем ACK.
Единицей передачи на физическом уровне 1×-EVDO является пакет физического уровня. Данные содержатся в пакете физического уровня. В некоторой реализации пакеты физического уровня содержатся в кадрах обратного канала связи. В некоторой реализации кадры могут быть продолжительностью в 26,66 миллисекунд. В некоторой реализации кадры могут содержать 16 временных интервалов, каждый из которых имеет длительность 1,66 мс. В некоторой реализации кадр может содержать 12 временных интервалов. Специалисту в данной области техники должно быть понятно, что кадры могут иметь множество длительностей. Специалисту в данной области техники должно быть понятно, что кадр может содержать любое количество временных интервалов.
В некоторой реализации пакеты физического уровня содержатся в подциклах. В некоторой реализации четыре временных интервала образуют подцикл. В некоторой реализации физический уровень допускает чередующиеся пакеты данных. Таким образом, например, первый пакет данных может быть передан в первом подцикле, второй пакет данных во втором подцикле, третий пакет данных в третьем подцикле и четвертый пакет данных в четвертом подцикле, если ACK не был еще получен для первой передачи первого пакета данных. Специалисту в данной области техники должно быть понятно, что кадр может содержать любое количество подциклов. Также, кадр может быть назван уплотнением импульсных сигналов.
На Фиг.3 показана функциональная блок-схема, иллюстрирующая структуру терминала доступа в одной реализации. В этой реализации терминал доступа содержит процессор 42, связанный с подсистемой 44 передачи и подсистемой 46 приема. Подсистема 44 передачи и подсистема 46 приема связаны с разделяемой антенной 48. Процессор 42 получает данные от подсистемы 46 приема, обрабатывает данные и выводит обработанные данные через устройство 50 вывода. Процессор 42 также получает данные от источника 52 данных и обрабатывает данные для передачи. Затем обработанные данные передаются подсистеме 44 передачи для передачи по обратному каналу связи. В дополнение к обработке данных от подсистемы 46 приема и источника 52 данных процессор 42 сконфигурирован для управления различными подсистемами терминала доступа. В частности, процессор 42 управляет подсистемой 44 передачи. Функциональность, относящаяся к терминалу доступа, описанная ниже, реализована в процессоре 42. Память 54 соединена с процессором 42 для хранения данных, используемых процессором.
В одной реализации система является системой cdma2000 1×EV-DO. Основные характеристики этой системы определены в стандарте по передаче данных IS-656. Этот стандарт основывается на семействе IS-95 стандартов множественного доступа с кодовым разделением каналов (CDMA). Название «1×EV-DO» отражает связь с семейством CDMA2000 («1×») и развитие стандарта («EV») для операций, оптимизированных по данным («DO»). Система 1×EV-DO, в основном, оптимизирована для беспроводного доступа к Интернет, для чего желательна высокая пропускная способность прямого канала связи.
Система 1×EV-DO спроектирована для передачи данных по прямому каналу связи с одной из 12 различных предопределенных скоростей, лежащих в диапазоне от 38,4 kbps до 2,4 Mbps (в дополнение к нулевой скорости). Соответствующие структуры пакетов данных определены (определяя такие параметры как длительность пакета, тип модуляции и тому подобное) для каждой из этих предопределенных скоростей передачи данных. В некоторой реализации связь по обратному каналу связи имеет место на одной из пяти различных скоростей передачи данных, лежащих в диапазоне от 9,6 kbps до 153,6 kbps (плюс нулевая скорость). Снова структуры пакетов данных определены для каждой из этих скоростей. Специалисту в данной области техники должно быть понятно, что обратный канал связи может поддерживать любое количество скоростей передачи данных.
Настоящее изобретение в основном относится к обратному каналу связи. Соответственно, скорости передачи данных для обратного канала в одной реализации определены ниже в таблице 1.
скорости
В другой реализации может быть больше или меньше скоростей, как должно быть понятно специалисту в данной области техники. Например, в таблице 2, приведенной ниже, имеется намного больше скоростей передачи данных, чем показано в таблице 1. Таблица 2 показывает скорости передачи данных по обратному каналу связи для другой реализации.
Как отмечено выше, настоящая система, основанная на 1×EV-DO, построена на CDMA стандартах. Соответственно, данные, передаваемые по обратному каналу связи, являются уплотненными с кодовым разделением каналов. То есть данные, соответствующие каждому терминалу доступа, идентифицируются с помощью соответствующего кода. Каждый код определяет коммуникационный канал. Таким образом, данные от любого или от всех терминалов доступа могут передаваться одновременно, и сеть доступа может различать различные источники данных с помощью кодов.
Передачи с кодовым разделением каналов ограничены интерференцией. Другими словами, количество данных, которое может быть передано, ограничено величиной интерференции, которая присутствует в окружающей среде. Хотя существует некоторое количество интерференции, вызванной фоновым или термальным шумом, основным источником интерференции с передачами терминалов доступа являются другие терминалы доступа в этой зоне. Если имеется немного других терминалов доступа и они передают небольшое количество данных, будет иметь место небольшая интерференция, таким образом, будет возможно передавать данные на высоких скоростях передачи данных. С другой стороны, если имеется много терминалов доступа, которые передают большое общее количество данных, уровень интерференции будет выше, и возможно можно будет использовать только очень низкие скорости передачи данных для передачи по обратному каналу связи.
Таким образом, должен быть обеспечен механизм для определения соответствующих скоростей передачи данных для каждого из терминалов доступа. Типичная беспроводная CDMA система использует небольшой набор скоростей передачи данных для всех терминалов доступа. Набор из двух возможных скоростей передачи данных является характерным для систем, функционирующих в соответствии со стандартом IS-95. Некоторые CDMA системы связи, обеспечивающие передачу голосового трафика и трафика данных, используют некоторые формы централизованного управления, в соответствии с чем информация, необходимая для выделения скоростей, собирается в одном центральном месте, и затем назначения скоростей передаются обратно к каждому терминалу доступа. Трудности при использовании централизованного управления заключаются в следующем: 1) вычисление оптимальных скоростей для всех терминалов доступа может быть сложным и требовать больших вычислительных ресурсов, 2) затраты на передачу управляющих сигналов от и к терминалам доступа могут быть чрезмерными, и 3) правильность «оптимального» назначения скорости становится под вопрос, как только начинают рассматриваться задержки и неопределенность о будущих потребностях в сети и ее поведении.
Одним аспектом, в котором настоящая система отличается от типичных систем, является то, что вычисление скоростей передачи данных для терминалов доступа есть обязанность каждого индивидуального терминала. Другими словами, оно распределено, а не централизовано. Соответствующая скорость передачи данных для определенного терминала доступа определяется самим этим терминалом доступа с помощью алгоритма Mac для обратного канала связи (“Mac” - промышленный термин для коммуникаций с множественным доступом). Алгоритм Mac для обратного канала связи обсуждается ниже.
Когда определенный терминал доступа вычисляет скорость передачи данных для его обратного канала связи, очевидно, что он захочет выбрать максимальную возможную скорость. Однако в секторе могут быть другие терминалы доступа. Эти другие терминалы доступа также будут пытаться передавать их данные с максимальной возможной скоростью. Так как мощность, необходимая для передачи данных, примерно пропорциональна скорости передачи данных, увеличение скоростей передачи данных на каждом из терминалов доступа также увеличит мощность их передач. Передачи каждого терминала доступа будут затем представлять увеличение количества интерференции для других терминалов доступа. В это же время, здесь может быть настолько много интерференции, что ни один из терминалов доступа не сможет передавать его данные с приемлемой частотой возникновения ошибок.
Таким образом, для терминалов доступа полезно иметь информацию об уровне интерференции, имеющемся в системе. Если уровень интерференции относительно низок, терминалы доступа могут увеличить их скорости передачи данных на некоторую величину, не вызывая значительного неблагоприятного влияния на общую производительность системы. Тем не менее, если уровень интерференции слишком высок, увеличение в скоростях передачи данных терминалов доступа будет иметь значительный неблагоприятный эффект.
Таким образом, общий уровень интерференции отслеживается в одной реализации сетью доступа. Сеть доступа сконфигурирована для простого определения больше или нет общий уровень интерференции порогового значения. Если уровень интерференции меньше порогового значения, что говорит о низком уровне активности, сеть доступа устанавливает бит обратной активности (RAB) в -1. Специалисту в данной области техники должно быть понятно, что другое значение может быть использовано для обозначения низкого уровня активности. Например, нулевое значение может быть использовано для обозначения низкого уровня активности. Бит обратной активности также иногда называют «бит занятости». Если уровень интерференции больше порогового значения, что говорит о низком уровне активности, то сеть доступа устанавливает бит обратной активности (RAB) равным 1. Специалисту в данной области техники должно быть понятно, что другое значение может быть использовано для обозначения высокого уровня активности. Бит обратной активности затем передается каждому из терминалов доступа для того, чтобы информировать их об уровне активности/интерференции в системе.
В одной реализации общий уровень интерференции вычисляется при помощи суммирования мощностей передач по обратному каналу связи каждого терминала доступа и деления на уровень теплового или фонового шума в окружающей среде. Затем частное сравнивается с пороговым значением. Если частное больше, чем пороговое значение, то уровень интерференции считается высоким, и бит обратной активности (RAB) устанавливается равным 1. Если частное меньше, чем пороговое значение, то уровень интерференции считается низким, и бит обратной активности (RAB) устанавливается равным -1.
Из-за того, что производительность передачи данных по обратному каналу связи зависит от скорости передачи данных и уровня интерференции в системе, необходимо принять во внимание уровень интерференции при расчете соответствующей скорости передачи данных. Поэтому вычисление скорости передачи данных с помощью алгоритма Маc для обратного канала связи учитывает уровень интерференции, который предоставлен терминалам доступа в форме бита обратной активности (RAB), в соответствии с различными аспектами настоящего изобретения. Алгоритм Маc для обратного канала связи также учитывает факторы, такие как потребности терминала доступа и физические ограничения в системе. На основе этих факторов скорость передачи данных для каждого терминала доступа в системе вычисляется один раз за подцикл.
Способ и устройство для определения скорости передачи для передачи данных в системе обратной связи терминала доступа включают в себя получение RAB от точки доступа в системе связи и передачу RAB цифровому фильтру для получения фильтрованного RAB.
В некоторой реализации RAB соответствует сектору сети доступа и устанавливается в сети доступа каждый временной интервал. Для каждого интервала терминал доступа декодирует RAB. В некоторой реализации RAB пропускается через цифровой фильтр с короткой временной постоянной ts с тем, чтобы получить быстрый бит обратной активности (QRAB). В некоторой реализации RAB пропускается через цифровой фильтр с длинной временной постоянной tL с тем, чтобы получить фильтрованный бит обратной активности (FRAB). QRAB и FRAB определяются по отношению к RAB и временной постоянной. QRAB и FRAB обеспечивают индикатор нагрузки на единицу мощности в системе. QRAB обеспечивает индикатор краткосрочной нагрузки в системе. FRAB обеспечивает индикатор долгосрочной нагрузки в системе.
QRAB - это RAB фильтрованный с короткой временной постоянной ts. В некоторой реализации ts равно четырем временным интервалам. В одной реализации QRAB определяется каждый временной интервал, но терминалы доступа используют величины QRAB, когда они появляются в пределах подцикла терминала доступа, то есть каждые четыре временных интервала.
FRAB - это RAB фильтрованный с длинной временной постоянной ts. В некоторой реализации ts равно 256 временным интервалам. В некоторой реализации FRAB определяется каждые 256 временных интервала.
Специалисту в данной области техники должно быть понятно, что временная постоянная фильтрации и интервал использования фильтрованного значения RAB не обязаны быть одинаковыми. Таким образом, в других реализациях, частота отсчетов фильтрованных значений RAB может быть не зависящей от временной постоянной фильтрации.
В некоторой реализации скорость передачи данных по обратному каналу связи определяется на основе фильтрованного значения RAB. Более того, процессор в терминале доступа может определить, находится ли терминал доступа в нерабочем режиме, и передать значение RAB, соответствующее незанятому состоянию, цифровому фильтру, когда терминал доступа находится в нерабочем режиме. Это приводит к краткосрочному приоритету, даваемому терминалам доступа, которые недавно были в нерабочем состоянии, что может быть желательно для уменьшения задержки для низкоскоростных пульсирующих источников.
В некоторой реализации скорость передачи данных по обратному каналу связи определяется на основе группы фильтров для RAB.
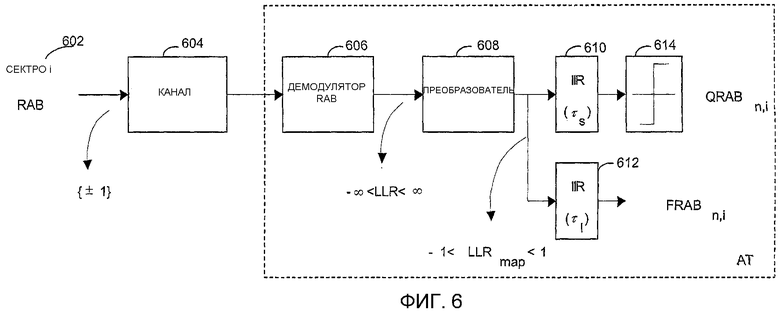
На Фиг.4 показана схема последовательности операций, иллюстрирующая алгоритм Mac для обратного канала связи, в соответствии с реализацией, имеющей два фильтра для RAB. Подсистема 46 приема по Фиг.3 принимает RAB. Процессор 42 по Фиг.3 выполняет алгоритм Mac для обратного канала связи.
Алгоритм Mac для обратного канала связи выполняется для каждого подцикла n. Алгоритм Mac для обратного канала связи выполняется на терминале доступа и делает возможным автономное изменение скорости терминалом доступа на основе широковещательной рассылки RAB каждым сектором в активном наборе.
На этапе 402 QRABn устанавливается равным максимальному QRAB от всех секторов i в активном наборе, то есть (maxi(QRABn,i)), где QRABn,i является дискретной величиной, QRABn,i  {-1,1}. FRABn устанавливается равным максимальному FRAB от всех секторов i (maxi(FRABn,i)), где FRABn,i является непрерывной величиной, QRABn,i
{-1,1}. FRABn устанавливается равным максимальному FRAB от всех секторов i (maxi(FRABn,i)), где FRABn,i является непрерывной величиной, QRABn,i  [-1,1]. Cn устанавливается равным наивысшему приоритету непустой очереди, представляющей класс данных с наивысшим приоритетом. Выполнение передается этапу 404.
[-1,1]. Cn устанавливается равным наивысшему приоритету непустой очереди, представляющей класс данных с наивысшим приоритетом. Выполнение передается этапу 404.
На этапе 404 выполняется проверка для того, чтобы определить является ли QRABn занятым. Если QRABn является занятым, то управление передается этапу 406. На этапе 406 изменение уровня мощности ΔΦn, которое является нарастающей величиной, определяется на основе уравнения ΔΦn = -fd,cn(Φn,FRABn). fd,cn есть понижающая функция, которая берет текущий уровень мощности Φn трафик-к-пилоту (T2P) и долгосрочный индикатор нагрузки сектора FRABn в качестве своих аргументов и является функцией от класса данных с наивысшим приоритетом cn. Φn есть непрерывная переменная состояния терминала доступа для текущего T2P уровня мощности. Φn есть текущее распределение ресурсов мощности для терминала доступа и также называется здесь плавной мощностью.
Если на этапе 404 QRABn не является занятым, то управление передается этапу 408. На этапе 408 выполняется проверка для того, чтобы определить был ли ограничен по данным или по мощности терминал доступа в последнем подцикле, то есть DatPowLimn-1 = false. Если терминал доступа не был ограничен по данным или мощности, то управление передается этапу 410, в противном случае управление передается этапу 412. Терминал доступа является ограниченным по данным, если он не имеет данных, которые необходимо передать на скорости, назначенной алгоритмом Mac для обратного канала связи. Терминал доступа является ограниченным по мощности, если он не имеет мощности, требуемой для передачи на скорости, назначенной алгоритмом Mac для обратного канала связи.
На этапе 410, в котором QRAB является незанятым, изменение уровня мощности
ΔФn, определяется на основе уравнения ΔФn=fu,cn(Фn, FRABn). Fu,cn есть повышающая функция, которая берет текущий уровень мощности Фn трафик-к-пилоту (Т2Р) и долгосрочный индикатор нагрузки сектора FRABn в качестве своих аргументов и является функцией от класса данных с наивысшим приоритетом Cn.
На этапе 412 изменение уровня мощности ΔФn устанавливается равным нулю. Из этапов 406, 410 и 412 управление переходит к этапу 414.
На этапе 414 изменяющаяся мощность Фд обновляется на основе уравнения Фn=max((1-1/τp,)Фn-1+1/τрαn-1+ΔФn, Фmin), где τp есть временная постоянная фильтра уровня Т2Р, αn-1 есть переданный Т2Р для последнего подцикла, и Фmin есть минимальное Т2Р для терминала доступа. В некоторой реализации τp равно 12 подциклам. Чтобы быть более точными, αn-1 есть действительное уменьшение Т2Р для последнего подцикла. Выражение (1-1/τp)Фn-1+1/τpαn-1+ΔФn представляет собой фильтр бесконечной импульсной характеристики (IIR) для мощности передачи с функцией нарастания ДФп, а также называется уровнем мощности переданного Т2Р. После этапа 414 управление передается этапу 416.
Алгоритм Мас для обратного канала связи использует приемник маркеров для установления соответствия между средней переданной мощностью и изменяющимся уровнем мощности Фn. Изменяющийся уровень мощности Фn является непрерывным, а переданная мощность дискретной. Переданная мощность ограничена действительными дискретными физическими Т2Р уровнями. Таким образом, чтобы установить соответствие между изменяющимся уровнем мощности и дискретным уровнем переданной мощности, используется приемник маркеров для размытия между физическими уровнями мощности и регулировки переданной скорости данных. В приемник маркеров вводится изменяющаяся мощность Фn и он уменьшается при назначении передаваемой мощности.
Фиг.5 иллюстрирует концепцию приемника 502 маркеров в соответствии с некоторой реализацией. Уровень 504 приемника маркеров обозначается. Верхним пределом уровня 506 приемника маркеров является max, максимальный уровень приемника маркеров. Изменяющийся уровень 508 мощности Фn добавляется к приемнику маркеров. Переданная мощность 510 αn вычитается из приемника 504 маркеров. αn 510 является Т2Р распределением мощности для подцикла n, что делает возможной соответствующую скорость передачи данных.
Блок 512 в приемнике маркеров представляет распределение Т2Р и данных в пакет для передачи, то есть при каждом новом распределении чередования, и терминал доступа может решить, как много бит поместить в пакет и с каким отношением трафик к пилоту Т2Р передать пакет. Прямоугольник показывает, что эти две величины выбираются и помещаются совместно.
На этапе 416 определяется уровень приемника маркеров n на основе уравнения n=min (n-1+Фn, fact(Фn)Фn, max), n-1 есть уровень приемника для последнего подцикла.
max есть максимальный размер приемника маркеров. fact(Фn) обозначает мультипликативный множитель для изменяющейся мощности Фn. fact(Фn) регулирует насколько много изменяющейся мощности Фn может быть аккумулировано в приемнике маркеров между распределениями мощности передачи. Например, fact(Фn)=2 означает, что распределение мощности передачи может быть в два раза больше, чем текущая изменяющаяся мощность.
В некоторой реализации fact(Фn) является уменьшающей функцией от Фn, так как пакетные данные более ограничены на высоких Фn. Из этапа 416 управление передается этапу 418.
На этапе 418 выполняется проверка для определения является ли текущий подцикл продолжением пакета. Если текущий подцикл является продолжением пакета, то управление передается этапу 420, в противном случае управление передается этапу 422.
На этапе 420 переданная мощность αn устанавливается равной предыдущему значению αn-3, так как текущий подцикл n является продолжением пакета.
На этапе 420 переданная мощность αn устанавливается равной предыдущему значению для заданного чередования, так как текущий подцикл n является продолжением пакета. В реализациях с тремя чередованиями αn=αn-3.
На этапе 422 терминал доступа распределяет переданную мощность αn таким образом, чтобы αn<=n и αn являлась действительным Т2Р уровнем мощности для действительной физической скорости передачи и целевого ожидания. Распределение переданной мощности αn таким образом, чтобы αт<=n, означает, что количество мощности, распределенное для переданной мощности αn, не может быть больше, чем количество мощности, содержащееся в приемнике маркеров n.
Часто желательно распределить мощность передачи достаточно высокой, для того чтобы удовлетворить целевому ожиданию. Данные могут иметь требование по предельной величине задержки. Такие данные должны быть переданы за определенный период времени. Такие данные должны удовлетворять целевому ожиданию. Для того чтобы удовлетворить целевому ожиданию, переданная мощность должна быть достаточно высокой для передачи данных в пределах их требования по предельной величине задержки. Мощность распределяется в переданную мощность так, чтобы соответствующие скорости передачи данных и целевое завершение делали возможным передачу данных в пределах их требования по предельной величине задержки.
Таблица 2, представленная ниже, является таблицей эффективной пропускной способности как функции размера полезной нагрузки (в битах) и времени завершения (во временных интервалах) в соответствии с некоторой реализацией. В другой реализации может быть больше или меньше скоростей передачи данных, как должно быть понятно специалисту в данной области техники.
При распределении терминал доступа выбирает T2P на основе целевого завершения в 2, 8, 12 или 16 временных интервалов. Это «целевое завершение» для пакета может быть также названо «целевое ожидание», так как ожидание, испытываемое пакетом, подвержено тому, насколько долго длится передача.
После этапов 420 и 422 управление передается этапу 424. На этапе 424 выполняется проверка для определения ограничен ли выбор αn наличием данных или наличием физической мощности передачи. Если не имеется данных для отправки, то αn ограничена по данным. Если распределенная передаваемая мощность αn больше, чем имеющаяся физическая мощность передачи, то терминал доступа ограничен имеющейся физической мощностью передачи. Если выбор αn ограничен наличием данных или наличием физической мощности передачи, то управление передается этапу 426 и DataPowLimn устанавливается равным «истина», в противном случае управление передается этапу 428 и DataPowLimn устанавливается равным «ложь». После этапов 426 и 428 управление передается этапу 430.
На этапе 430 приемник маркеров βn обновляется внешним потоком. Распределенная передаваемая мощность вычитается из приемника маркеров βn, то есть βn = βn - αn. После этапа 430 управление передается этапу 432, на котором алгоритм Mac для обратного канала связи повторяется для следующего подцикла.
Обработанные данные передаются подсистеме 44 передачи для передачи по обратному каналу связи на распределенной передаваемой мощности αn.
Хотя алгоритм Мас для обратного канала связи по Фиг.4 использует только два фильтра для RAB, специалисту в данной области должно быть понятно, что в другой реализации может быть использовано любое количество фильтров для RAB для определения изменяющегося уровня мощности.
На Фиг.6 показана блок-схема генерации QRAB и FRAB в соответствии с некоторой реализацией. Каждый сектор определяет свой уровень нагрузки и использует свой уровень нагрузки для установления RAB. RAB обновляется и широковещательно передается каждый временной интервал.
Сектор i посылает RAB (RAB∈{-1,1}) через беспроводной канал 604 связи, который принимается демодулятором 606 RAB терминала 600 доступа. Демодулятор 606 RAB демодулирует принятый сигнал, содержащий RAB, и выводит логарифмическое отношение правдоподобия (-∝<LLR<∝). В некоторой реализации LLR отображается преобразователем 608 перед фильтрацией для того, чтобы избежать смещения единственной большой величины в выходном сигнале фильтра. В некоторой реализации для отображения используется функция гиперболического тангенса. В некоторой реализации функция гиперболического тангенса равна y=(ex/2-е-x/2)/(ex/2-е-x/2), -1<y<1 для всех действительных х. Отображение является решением с минимальной среднеквадратической ошибкой для оценки RAB по одному интервалу. Выходной сигнал преобразователя 608 передается IIR фильтру 610 и IIR фильтру 612 каждый временной интервал. В некоторой реализации IIR фильтр 610 имеет короткую временную постоянную τs, равную четырем временным интервалам. QRAB проверяется каждый подцикл n.
В каждом подцикле каждый терминал доступа определяет значение QRAB для каждого сектора в активном наборе, которое является жестко ограниченной выходной величиной IIR фильтра для каждого сектора. AT комбинирует QRAB от всех секторов в его активном наборе и соответственным образом подстраивает скорость передачи данных.
FRAB является мерой нагрузки сектора аналогично QRAB, но получается при прохождении RAB для сектора через IIR фильтр с более длинной временной постоянной τL. В некоторой реализации τL равно 256 интервалам. В то время как QRAB является относительно мгновенной величиной, FRAB обеспечивает информацию о долгосрочной нагрузке сектора.
Функции для определения изменения уровня мощности ΔΦn, которая является нарастающей величиной, являются функциями, которые принимают во внимание приоритет классов данных cn. В некоторой реализации классы данных являются классами услуг в рамках структуры качества и класса предоставляемых услуг передачи данных (QoS). В одной реализации структура QoS является дифференцированными услугами (DiffServ). Реализация включает в себя, но не ограничивается тремя перечисленными классами услуг: (1) приоритетное продвижение данных (EF); (2) гарантированное продвижение данных (AF); и наилучшее продвижение данных (BF). В некоторой реализации эти три класса обрабатываются в порядке приоритета, где EF имеет самый высокий приоритет, AF имеет промежуточный приоритет, и BE имеет низкий приоритет. RLMac получает эти три класса услуг в трех отдельных очередях.
Функции для определения изменения уровня мощности ΔΦn, fd,cn(Φn,FRABn) и fu,cn(Φn,FRABn) параметризованы классом данных cn. Cn - это класс наивысшего приоритета для терминала доступа с любой непустой очередью. Параметризация функций классом данных делает возможным определение относительного приоритета для различных потоков данных через терминал доступа.
fd,cn(Φn,FRABn) и fu,cn(Φn,FRABn) - это двумерные кусочно-линейные функции, параметризованные c. В некоторой реализации 11 T2P точек и три FRAB точки обеспечивают 33 точки, в которых fd,cn и fu,cn заданы явно. Точки для повышающей и понижающей функций, соответственно, задаются как D1,c, D2,c, D3,c, … и U1,c, U2,c, U3,c, … где каждое U и D является вектором размерностью 11×1. Терминал доступа выполняет билинейную интерполяцию. Наивысшая заданная точка FRAB может быть меньше единицы, в таких точках величина является предельной.
В некоторой реализации fd,cn(Φn,FRABn) является монотонной неубывающей функцией по FRAB для фиксированного Φn.
В некоторой реализации fu,cn(Φn,FRABn) является монотонной невозрастающей функцией по FRAB для фиксированного Φn.
В некоторой реализации отношение fu,cn(Φn,FRABn)/ fd,cn(Φn,FRABn) является монотонной убывающей функцией по FRAB для фиксированного Φn.
Специалисту в данной области должно быть понятно, что информация и сигналы могут быть представлены с использованием любой из множества технологий и методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы и микрокадры, которые встречаются в приведенном выше описании, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любой их комбинацией.
Специалисту в данной области должно быть понятно, что любые иллюстративные логические блоки, модули, схемы и этапы алгоритмов, описанные в связи с раскрытыми здесь реализациями, могут быть реализованы как электронное аппаратное обеспечение, компьютерное программное обеспечение или их комбинация. Для ясной иллюстрации этой взаимозаменяемости аппаратного и программного обеспечения различные компоненты, блоки, модули, схемы и этапы были описаны, в общем, в терминах их функциональности. Будет ли такая функциональность реализована в аппаратном или в программном обеспечении зависит от конкретного приложения и конструктивных ограничений, налагаемых на всю систему. Специалисты в данной области техники могут реализовать описанную функциональность различными способами для каждого конкретного приложения, но такие решения реализации не должны интерпретироваться как вызывающие выход за пределы объема настоящего изобретения.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытыми здесь реализациями, могут быть реализованы или выполнены с помощью процессора общего назначения, цифрового процессора сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретной вентильной схемы или транзисторной логики, дискретных аппаратных компонент или любой их комбинации, предназначенной для выполнения описанных здесь функций. Процессор общего назначения может быть микропроцессором, но, в качестве альтернативы, процессор может быть традиционным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор может быть также реализован как комбинация вычислительных устройств, например DSP и микропроцессора, множества микропроцессоров, одного или более процессоров, связанных с DSP ядром, или любая другая подобная комбинация.
Этапы способа или алгоритма, описанные в связи с раскрытыми здесь реализациями, могут быть реализованы непосредственно в аппаратном обеспечении, в программном модуле, выполняемом процессором, или комбинацией этих двух. Программный модуль может располагаться в RAM памяти, флэш-памяти, ROM памяти, EPROM памяти, EEPROM памяти, регистрах, на жестком диске, на съемном диске, на CD-ROM или на запоминающей среде другого типа, известного в данной области техники. Примерная запоминающая среда соединена с процессором так, чтобы процессор мог считывать информацию с и записывать информацию на запоминающую среду. В качестве альтернативы запоминающая среда может быть интегрирована в процессор. Процессор и запоминающая среда могут располагаться в ASIC. ASIC может размещаться в терминале пользователя. В качестве альтернативы процессор и запоминающая среда могут располагаться в дискретных компонентах пользовательского терминала.
Приведенное выше описание раскрытых реализаций предоставляется для того, чтобы специалист в данной области техники смог изготовить и использовать настоящее изобретение. Различные модификации к этим реализациям будут очевидны для специалистов в данной области техники, и базовые принципы, определенные здесь, могут быть применены к другим реализациям без выхода за пределы объема изобретения. Таким образом, настоящее изобретение не предназначено для ограничения к представленным здесь реализациям, а наоборот, соответствует самому широкому объему, согласующемуся с раскрытыми здесь принципами и отличительными особенностями.
Хотя настоящее изобретение было описано со ссылкой на конкретные реализации, должно быть понятно, что реализации являются иллюстративными и что объем изобретения не ограничен этими реализациями. Возможно множество вариаций, модификаций, добавлений и улучшений к реализациям, описанным выше. Предусматривается что эти вариации, модификации, добавления и улучшения попадают в объем изобретения, который определен в нижеследующей формуле изобретения.
Изобретение относится к технике связи. Технический результат состоит в повышении пропускной способности за счет регулировки скорости передачи данных. Для этого в способе осуществляют прием бита обратной активности (RAB) от сети доступа в системе связи и передачу RAB множеству цифровых фильтров для получения фильтрованных RAB. Скорость передачи данных по обратному каналу связи определяется на основе этих фильтрованных величин RAB. Из фильтрованных RAB определяется непрерывный плавный уровень мощности для каждого обновления скорости. Терминал доступа отображает непрерывный плавный уровень мощности на действительные физические передачи с помощью размытия по дискретным уровням мощности, разрешенным на физическом уровне. 4 н. и 18 з.п. ф-лы, 6 ил., 2 табл.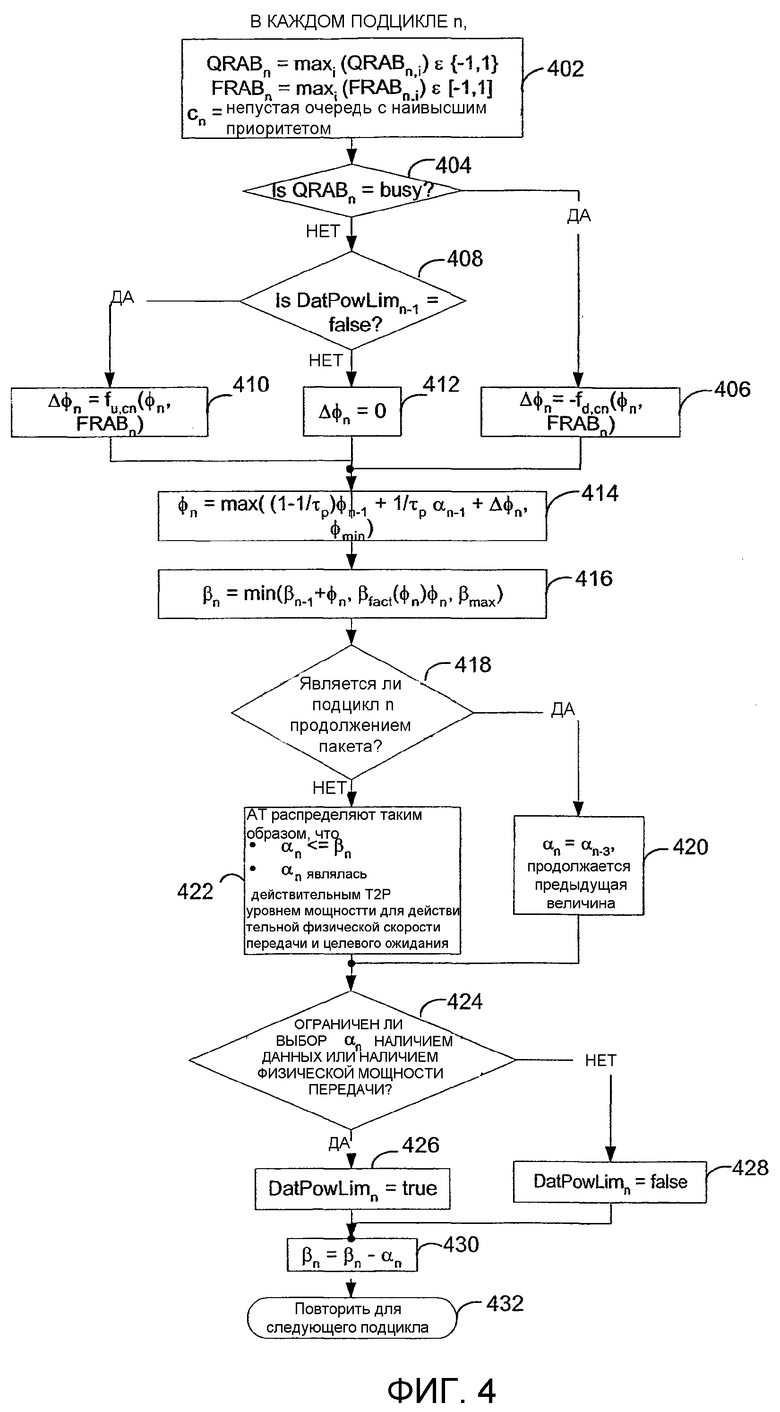
1. Способ определения скорости передачи данных для передач данных в системе с обратной связью от терминала доступа, включающий в себя этапы, на которых:
принимают бит обратной активности;
передают упомянутый бит обратной активности первому цифровому фильтру для декодирования и получения фильтрованного бита обратной активности;
определяют изменяющийся уровень мощности на основе упомянутого фильтрованного бита обратной активности и определяют скорость передачи данных на основе упомянутого изменяющегося уровня мощности.
2. Способ по п.1, в котором скорость передачи данных определяется на основе определения уровня мощности сигнала трафика к пилот-сигналу и распределения битов, уровень мощности сигнала трафика к пилот-сигналу и распределение битов определяются на основе изменяющегося уровня мощности.
3. Способ по п.1, в котором бит обратной активности принимается каждый временной интервал.
4. Способ по п.1, в котором упомянутый первый цифровой фильтр имеет короткую временную постоянную, отражающую краткосрочную нагрузку мощности в системе связи.
5. Способ по п.1, в котором упомянутый первый цифровой фильтр имеет длинную временную постоянную, отражающую долгосрочную нагрузку мощности в системе связи.
6. Способ по п.1, который также включает в себя этап, на котором передают данные на упомянутой скорости передачи данных, где скорость передачи данных определяется отображением изменяющегося уровня мощности на дискретные уровни мощности.
7. Способ по п.6, в котором изменяющийся уровень мощности отображается на дискретные уровни мощности так, чтобы среднее дискретных уровней мощности за период времени примерно равнялось среднему изменяющегося уровня мощности за упомянутый период времени.
8. Способ по п.1, который также включает в себя этап, на котором пропускают бит обратной активности через второй цифровой фильтр для декодирования и получения второго фильтрованного бита обратной активности, где изменяющийся уровень мощности также базируется на втором фильтрованном бите обратной активности.
9. Способ по п.8, в котором первый цифровой фильтр имеет короткую временную постоянную, отражающую краткосрочную нагрузку мощности в системе связи, и второй цифровой фильтр имеет длинную временную постоянную, отражающую долгосрочную нагрузку мощности в системе связи.
10. Способ по п.9, в котором изменяющийся уровень мощности определяется на основе функции, параметризованной вторым фильтрованным битом обратной активности.
11. Способ по п.9, в котором изменяющийся уровень мощности определяется на основе понижающей функции, параметризованной вторым фильтрованным битом обратной активности, если первый фильтрованный бит обратной активности показывает занятую краткосрочную нагрузку мощности в системе связи.
12. Способ по п.11, в котором понижающая функция также параметризована предыдущим изменяющимся уровнем мощности.
13. Способ по п.9, в котором изменяющийся уровень мощности определяется на основе повышающей функции, параметризованной вторым фильтрованным битом обратной активности, если первый фильтрованный бит обратной активности не показывает занятую краткосрочную нагрузку мощности в системе связи и данные и мощности не ограничены.
14. Способ по п.13, в котором повышающая функция также параметризована предыдущим изменяющимся уровнем мощности.
15. Способ по п.9, который также включает в себя этап, на котором передают данные на упомянутой скорости передачи данных, где скорость передачи данных определяется отображением изменяющегося уровня мощности на дискретные уровни мощности.
16. Способ по п.15, в котором изменяющийся уровень мощности отображается на дискретные уровни мощности так, чтобы среднее дискретных уровней мощности за период времени примерно равнялось среднему изменяющегося уровня мощности за упомянутый период времени с помощью использования приемника маркеров.
17. Способ по п.15, в котором изменяющийся уровень мощности отображается на дискретные уровни мощности с использованием приемника маркеров, изменяющийся уровень мощности добавляется к приемнику маркеров и отображенный дискретный уровень мощности вычитается из приемника маркеров.
18. Способ по п.17, в котором отображенный дискретный уровень мощности не превышает суммарное количество изменяющегося уровня мощности, добавленноого к приемнику маркеров.
19. Способ по п.17, в котором суммарное количество изменяющегося уровня мощности, добавленноого к приемнику маркеров, не превышает максимальный уровень приемника маркеров.
20. Устройство для определения скорости передачи данных для передачи данных в системе связи с обратной связью от терминала доступа, содержащее:
средство для приема бита обратной активности;
средство для передачи бита обратной активности цифровому фильтру для декодирования и получения фильтрованного бита обратной активности;
средство для определения изменяющегося уровня мощности на основе фильтрованного бита обратной активности и
средство для определения скорости передачи данных на основе изменяющегося уровня мощности.
21. Устройство для определения скорости передачи данных для передачи данных в системе с обратной связью от терминала доступа, содержащее:
подсистему приема для приема бита обратной активности и
процессор для применения цифрового фильтра к биту обратной активности для декодирования и получения фильтрованного бита обратной активности, определения изменяющегося уровня мощности на основе фильтрованного бита обратной активности и определения скорости передачи данных на основе изменяющегося уровня мощности.
22. Машиночитаемый носитель, интегрированный в процессор и имеющий информацию, позволяющую процессору реализовать способ определения скорости передачи данных, способ включает в себя этапы, на которых:
принимают бит обратной активности;
передают бит обратной активности цифровому фильтру для декодирования и получения фильтрованного бита обратной активности;
определяют изменяющийся уровень мощности на основе фильтрованного бита обратной активности и
определяют скорость передачи данных на основе изменяющегося уровня мощности.
| ЛИНИЯ РАДИОСВЯЗИ | 1999 |
|
RU2163053C2 |
| RU 2001531 C1, 15.10.1993 | |||
| US 6507741 B1, 14.01.2003 | |||
| СПОСОБ КОНТРОЛЯ ШЕРОХОВАТОСТИ ДЕРЕВЯННОЙ ПОВЕРХНОСТИ | 2005 |
|
RU2378614C2 |
| US 6501955 B1, 31.12.2002. | |||

