Изобретение относится к технике измерения вязкости, а более конкретно - к устройству вибрационных датчиков погружного типа, предназначенных для использования в исследовательских лабораториях, в медицине, для контроля технологических жидкостей.
Рассматриваемый тип датчиков состоит, как правило, из собственно вибратора, пробного тела и стержневого подвеса. Последний соединяет вибратор с пробным телом и передает ему механическое движение.
В процессе измерения электрически управляемый вибратор находится на воздухе, а колеблющееся пробное тело на конце достаточно длинного подвеса погружают в контролируемую среду. Измеряют действующую со стороны жидкости тормозящую силу.
Трение между колеблющимся телом и окружающей средой (торможение) описывается формулой
Zт=F/ξ'=С ,
,
где Zт - механическое сопротивление трения жидкости о тело;
F - сила, вызывающая движение;
ξ' - колебательная скорость;
ρ - плотность жидкости;
η - вязкость жидкости;
С - коэффициент пропорциональности.
Реально, кроме сопротивления трения пробного тела присутствуют также
Z0 - сопротивление, обусловленное внутренним трением измерительной установки;
Zп - механическое сопротивления трения жидкости о соприкасающиеся с ней элементы подвеса.
Общее наблюдаемое сопротивление Z=Zт+Zп+Z0=Zж+Z0.
В электромеханическом классе устройств вызывающая движение сила и скорость движения пропорциональны соответствующим электрическим сигналам UF и Uξ. Поэтому имеют место соотношения
Z=BUF/Uξ; Z0=BUF0/Uξ0.
UF0 и Uξ0, которые обусловлены величиной внутреннего трения вибратора, измеряют при положении пробного тела на воздухе.
При стабильном значении Uξ=Uξ0 сигнал U=UF связан с линейным образом.
U=U0+К,
где К - коэффициент пропорциональности,
U0=UF0 и зависит от заданной амплитуды движения.
Эксперименты проводят при одинаковом положении зонда в ячейке. При этом измерения, связанные с изменением объема пробы в сосуде, например, в результате добавления реагентов, осложняются из-за присутствия в полном сопротивлении зависящего от глубины погружения фрагмента Zп.
Известны вибрационные вискозиметры, например вискозиметр А.Б.Каплуна, содержащий в качестве датчика электромеханический вибратор и имеющий пробное тело в виде закрепленной на жестком стержне пластины [Соловьев А.Н., Каплун А.Б. Вибрационный метод измерения вязкости жидкостей. - Новосибирск: Наука, 1970. - 142 с.].
Недостатком этой конструкции является то, что в процессе измерения происходит движение в жидкости не только пробного тела, но и некоторой части стержня - подвеса, величина которой зависит от глубины погружения. Это приводит к зависимости выходного сигнала датчика от глубины погружения пробного тела. Таким образом, для каждой глубины требуется отдельная калибровка.
Наиболее близким к предлагаемому изобретению является камертонный датчик. [А.В.Богословский, М.А. Полуэктов // Физико-химические свойства дисперсных систем и их применение. - Томск, 1988, - с.34-38]. Он представляет собой вибратор - камертон, закрепленный за узловую точку в опоре. На ножки наклеены пьезоэлементы и установлены стержень с пробным телом на конце на одной из ножек и противовес - на другой.
При измерениях погружается в жидкость не только пробное тело, но и некоторая часть стержня. Ее трение о жидкость приводит к зависимости выходного сигнала датчика от глубины погружения. Таким образом, следует проводить измерения при одинаковом положении пробного тела в контролируемые жидкости, или проводить специальную калибровку для каждой глубины.
Задачей изобретения является создание датчика, для которого результат измерения не зависит от глубины погружения пробного тела в жидкость.
Техническим результатом является устранение влияния глубины погружения на выходной сигнал вибрационного датчика и, таким образом, увеличение достоверности результатов измерений и расширение возможностей использования вибрационного метода измерения. Указанный технический результат достигается тем, что предлагаемый датчик вязкости содержит два одинаковых вибратора с присоединенными одинаковыми стержнями. На конце одного из стержней закреплено пробное тело. На конце другого стержня пробное тело отсутствует.
Полное сопротивление такого составного датчика состоит из двух фрагментов
Zж1=Z01+Zп1+Zт,
Zж2=Z02+Zп2,
где Z01 - внутреннее сопротивление первого вибратора,
Zп1 - сопротивление, обусловленное влиянием стержня - подвеса пробного тела первого вибратора,
Zт - сопротивление, обусловленное пробным телом,
Z02 - внутреннее сопротивление второго вибратора,
Zп2 - сопротивление, обусловленное влиянием стержня - подвеса второго вибратора.
Zп1=Zп2=Zп.
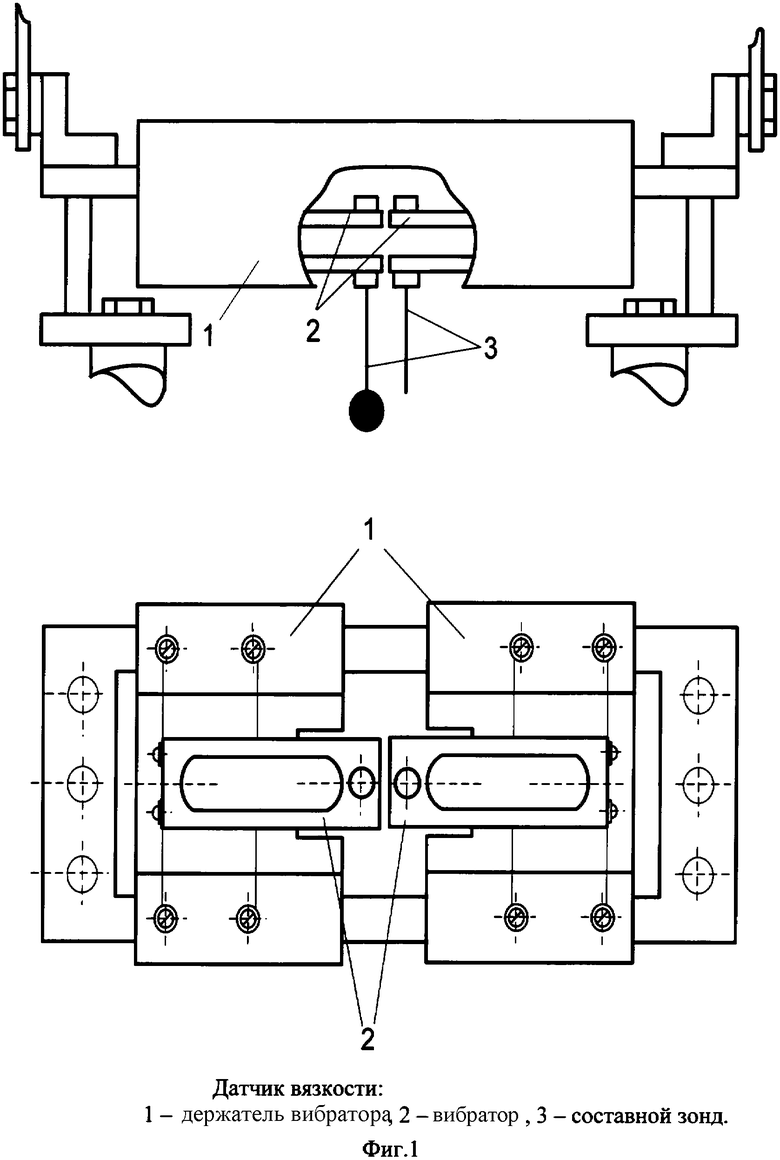
Предлагаемый датчик изображен на фиг.1. Схема электрических соединений приведена на фиг.2.
Каждый вибратор (2) подключен к собственной схеме управления - автогенератору (4). Схемы обеспечивают колебания на частоте резонанса с постоянной, не зависящей от механической нагрузки амплитудой.
Аналоговые выходные сигналы U1 и U2 рассматриваемых схем (4) пропорциональны текущим значениям механического сопротивления соответствующих вибраторов. Поэтому приведенные выше выражения для сопротивлений Z можно переписать для соответствующих электрических напряжений
U1=U01+Uп1+Uт,
U2=U02+Uп2.
Указанные напряжения поступают на устройство сравнения - схему вычитания (5). При этом ее выходное напряжение будет
U12=(U01-U02)+(Uп1-Uп2)+Uт.
Величина U012=(U01-U02) измеряется на воздухе, является в эксперименте постоянной и отражает разную величину внутреннего трения используемых камертонов. Значения напряжений Uп1 и Uп2 зависят от глубины погружения.
Uп1=K1h, Uп2=K2h,
где K1, K2 - коэффициенты пропорциональности; h - глубина погружения пробного тела.
При соответствующей настройке указанных схем K1=К2, и разностный сигнал U12 не зависит от глубины погружения.
Пример конкретного выполнения.
Схема датчика вязкости изображена на фиг.1. Два одинаковых латунных вибратора - камертона (2) с частотой резонанса ω0≈400 Гц закреплены в держателе (1) концами ножек навстречу друг другу таким образом, что их колебания ориентированы перпендикулярно горизонту. К нижней ножке вибратора (2лев) присоединен стержень (3) из нержавеющей стали диаметром 1,5 мм. На конце стержня находится пробное тело в виде шара диметром 6 мм. К нижней ножке вибратора (2прав) аналогичным образом присоединен такой же стержень (3). Пробное тело на его конце отсутствует. На фиг.2 приведена функциональная схема соединения фрагментов устройства. Каждый из вибраторов (2) подключен к собственной схеме управления - автогенератору (4). Выходные сигналы схем (4), U1, U2 поступают на входы схемы вычитания (5). Разностный сигнал U12 регистрируется с помощью персонального компьютера.
Измерения проводят следующим образом. Находят U120 при колебании зонда на воздухе. Находят U12k при колебаниях зонда в калибровочной жидкости с известными значениями ρk, ηk. Определяют коэффициент по формуле  . Далее определяют U12ж при колебании зонда в исследуемой жидкости. Находят искомое значение по формуле
. Далее определяют U12ж при колебании зонда в исследуемой жидкости. Находят искомое значение по формуле

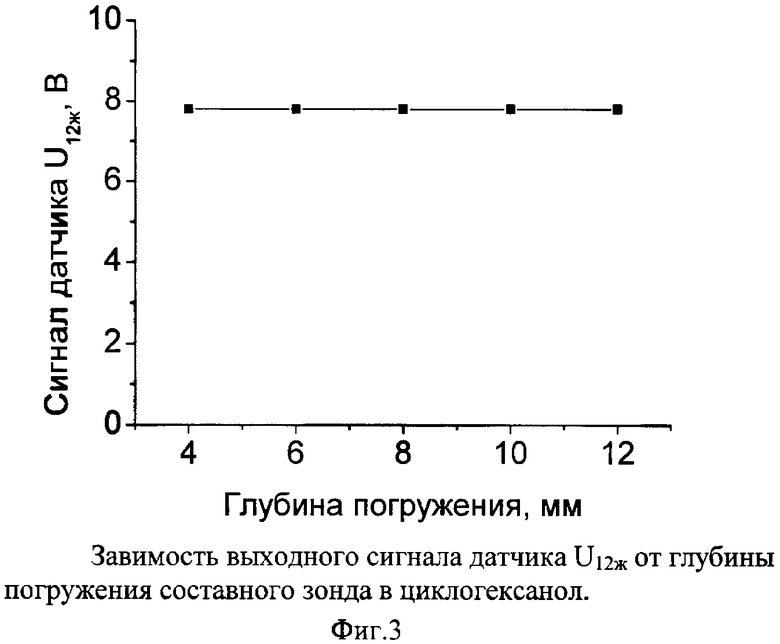
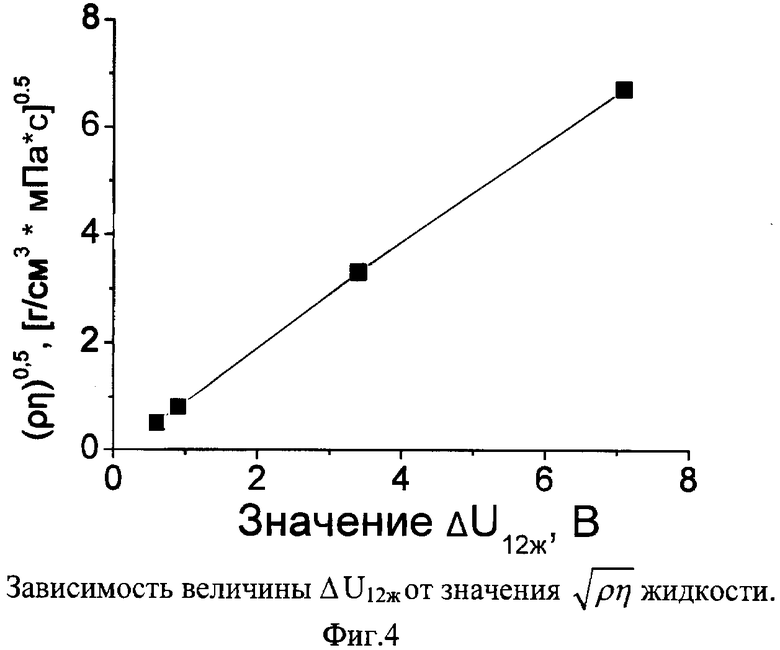
На фиг.3 приведен график зависимости выходного сигнала датчика U12ж от глубины погружения составного зонда в циклогексанол. На фиг.4 приведен график зависимости  -
-  , полученный путем погружения составного зонда на глубину 10 мм в октан (1), декан (2), диэтилфталат (3) и в циклогексанол (4).
, полученный путем погружения составного зонда на глубину 10 мм в октан (1), декан (2), диэтилфталат (3) и в циклогексанол (4).
Определенная по графику чувствительность составляет  .
.
Таким образом, предлагаемый датчик вязкости позволяет проводить измерения при различной глубине погружения пробного тела в контролируемую жидкость.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННЫЙ ВИСКОЗИМЕТР | 2006 |
|
RU2334213C2 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 1995 |
|
RU2094771C1 |
| ДАТЧИК ВЯЗКОСТИ | 2003 |
|
RU2257566C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ | 1997 |
|
RU2135980C1 |
| ДАТЧИК ВЯЗКОСТИ | 1995 |
|
RU2094772C1 |
| Вибрационный вискозиметр тиксотропных жидкостей | 2020 |
|
RU2727263C1 |
| Вибрационный датчик вязкости | 1988 |
|
SU1599711A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ ТОНКИХ СЛОЕВ ЖИДКОСТИ (ВАРИАНТЫ) | 2011 |
|
RU2498268C2 |
| ВИБРОВИСКОЗИМЕТРИЧЕСКИЙ ДАТЧИК | 2008 |
|
RU2419781C2 |
| Вибрационный плотномер-вискозиметр | 1980 |
|
SU898288A1 |
Изобретение относится к технике измерения вязкости, а более конкретно - к устройству вибрационных датчиков погружного типа, предназначенных для использования в исследовательских лабораториях, в медицине, для контроля технологических жидкостей. Датчик вязкости содержит электрически управляемый вибратор, схему управления вибратором, присоединенный подвес и пробное тело на его конце, при этом датчик дополнительно содержит еще один такой же вибратор со схемой управления и присоединенным подвесом, но без пробного тела, и схему вычитания, к двум входам которой присоединены аналоговые выходы схем управления вибраторами, а выход соединен с регистрирующим устройством. Технический результат - увеличение достоверности результатов измерений и расширение возможностей использования вибрационного метода измерений. 4 ил.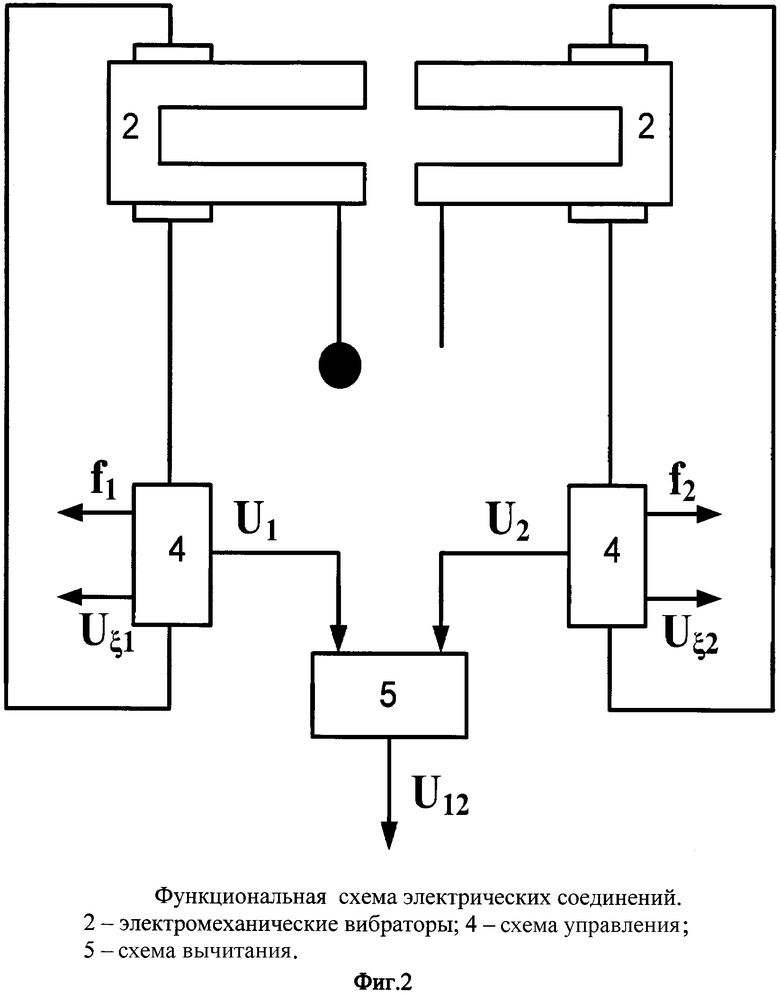
Датчик вязкости, содержащий электрически управляемый вибратор, схему управления вибратором, присоединенный подвес и пробное тело на его конце, отличающийся тем, что он дополнительно содержит еще один такой же вибратор со схемой управления и присоединенным подвесом, но без пробного тела, и схему вычитания, к двум входам которой присоединены аналоговые выходы схем управления вибраторами, а выход соединен с регистрирующим устройством.
| БОГОСЛОВСКИЙ А.В., ПОЛУЭКТОВ М.А | |||
| Физико-химические свойства дисперсных систем и их применение | |||
| - Томск, 1988, с.34-38 | |||
| Способ измерения вязкости жидких сред | 1982 |
|
SU1117490A1 |
| Вибрационный вискозиметр | 1987 |
|
SU1413486A1 |
| СПОСОБ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2051374C1 |
| JP 3257346 A, 15.11.1991. | |||

