Это изобретение относится, в целом, к обнаружению выброса и к мониторингу в стволе скважины. В частности, это изобретение относится к способам и системам для обнаружения выброса, базирующимся на величине, обратной скорости бурового раствора (медленность бурового раствора).
Уровень техники
Управление скважиной - это важный аспект разведки нефти и газа. Во время бурения скважины при разведке нефти и газа разные меры должны быть введены на участке, чтобы предупредить повреждение персонала и оборудования, связанного с буровыми работами. Например, буровые растворы (глинистые растворы) должны иметь правильный вес, чтобы предупредить пластовые флюиды от внезапного выброса в ствол скважины. Даже при всех мерах предосторожности проникновение непредвиденных зон высокого давления в пласт неизбежно. Когда это происходит, флюиды высокого давления обычно фонтанируют в стволе скважины и скважина, как говорится, начинает «выброс».
Повышение давления, связанное с выбросом, является результатом притока пластовых флюидов (жидкости, газа или их комбинации) из пласта высокого давления в ствол скважины. Выброс высокого давления будет распространяться от места притока в стволе скважины вверх по стволу скважины (например, из зоны высокого давления в зону низкого давления). Если выбросу позволить достигнуть поверхности, буровой раствор, буровые инструменты и другие буровые сооружения могут быть вынесены из ствола скважины. Эти «фонтанирования» могут привести к катастрофическим разрушениям бурового оборудования и травматизму или гибели персонала.
Выброс - это одна из самых больших проблем безопасности для бурильщиков. Каждый год инциденты с выбросом/фонтанированием стоят индустрии миллионы долларов. Хотя доступны разные меры (например, противовыбросовые превенторы; (ПП)), которые могут сократить риск фонтанирований после того, как буровая скважина начинает выброс, было бы более эффективно, если бы были пути прогнозирования или определения приближающегося выброса и фонтанирования. Раннее определение начинающегося выброса может предостеречь бурильщика и предоставить достаточное время для планирования мер по устранению выброса и избежать катастрофы. С другой стороны, если выброс определен поздно, может быть необходимо осуществить спуск-подъем бурильной колонны, чтобы выполнить мероприятия по управлению выбросом, такие как выкачивание выброса газа или активация противовыбросовых превенторов. Все эти мероприятия очень дорогостоящие. Еще хуже, если выброс определен слишком поздно, чтобы надлежащие мероприятия были начаты, это может привести к фонтанированию, ведущему к катастрофическим повреждениям оборудования и/или персонала. Следовательно, способы и системы, которые могут контролировать и определять преждевременный выброс, очень полезны.
Большинство способов определения выброса базируются на мониторинге объема бурового раствора, расходе жидкости или изменениях давления. Например, в патентной заявке США No. 6371204, выданной Singh et al., раскрывается способ определения выброса посредством тщательного мониторинга объемов бурового раствора, накачиваемых в бурильную колонну и выводимых на поверхность. При помощи сравнения или суммирования подсчитанного объема возможно определить нежелательные потоки раствора между стволом скважины и подземным пластом. Объемы жидкости могут быть определены мониторингом уровней растворов, с использованием звукового или акустического датчика, который может измерять поверхность раздела флюида.
Акустические датчики также могут быть использованы различным образом для определения выброса. Например, в патентной заявке США No. 4273212, выданной Dorr et al., раскрывается способ, который использует акустические датчики для контролирования расстояния от буровой установки до дна ствола скважины во время бурения. Акустический датчик на поверхности передает сигнал в столб бурового раствора. Этот акустический сигнал проходит по скважине и отражается от воротника бурильной колонны со скважинным оборудованием обратно к буровой установке. Расстояние между буровой установкой и оборудованием низа бурильной колонны (BHA) может быть вычислено и использовано, чтобы контролировать процесс бурения. Если имеет место какой-нибудь приток пластовых флюидов (особенно газов), акустические сигналы будут значительно изменены. Таким образом, приток пластовых флюидов будет производить искажения во времени прохождения сигнала (и, следовательно, в рассчитанных расстояниях). Любое такое изменение может быть сигналом о выбросе.
В патентных заявках США No. 4733233, выданной Grosso et al., и 4733232, выданной Grosso, раскрывается способ, который использует акустический скважинный источник, чтобы производить акустические сигналы, и затем использует два датчика давления на поверхности для распознавания кольцеобразной акустической волны в рециркулирующем потоке бурового раствора и кольцеобразных акустических волн в бурильной колонне. Изменение в амплитуде сигнала в кольцевом зазоре относительно амплитуды сигнала в бурильной колонне используется для определения наличия притока скважинного флюида.
В патентной заявке США No. 5154078, выданной Codazzi, раскрывается два способа для обнаружения выброса во время бурения. Первый способ базируется на картинах стоячих волн, формируемых колебаниями давления насосов бурового раствора буровой установки. Такие картины стоячих волн образуют временные последовательности максимумов и минимумов, которые могут быть контролируемы, для определения фазы и периода стоячих волн. Постоянное увеличение разности фаз между стоячими волнами в кольцевом зазоре и стоячими волнами в бурильной колонне может указывать на выброс. Второй способ, предлагаемый в этом патенте, использует акустические сигналы из скважинного источника вблизи дна буровой скважины. Если имеется приток газа в стволе скважины (кольцевом зазоре), акустические сигналы перемещаются в кольцевом зазоре со скоростью, отличающейся от скорости внутри бурильной колонны. Таким образом, разница во времени поступления, превышающая критерий, может означать выброс.
Другой метод заключается в контролировании изменения давления в столбе бурового раствора. Большинство опасных выбросов получаются из-за притока газа. Стоит газу вытечь в ствол скважины, он будет изменять гидравлическое давление столба бурового раствора. Поэтому датчики давления могут обеспечивать средство обнаружения для мониторинга притока газов. Пример этого метода может быть обнаружен в патентной заявке США No. 6176323, выданной Weirich et al.
В то время как существуют разные техники определения выброса, есть постоянная необходимость в усовершенствованных способах и системах, которые могут обеспечивать раннее предупреждение выброса для дальнейшего улучшения безопасности операций подземной разведки и добычи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Один аспект изобретения относится к способам определения выброса в стволе скважины. Способ в соответствии с одним вариантом осуществления изобретения включает в себя получение набора измерений от устройства акустического каротажа в стволе скважины; определение медленности бурового раствора (величины обратной скорости бурового раствора), в стволе скважины из набора измерений; и сравнение медленности бурового раствора с выбранным критерием, где определение медленности бурового раствора включает в себя: определение медленности моды флюида, как функции частоты, для, по меньшей мере, одной моды флюида, и определение медленности бурового раствора из медленности моды жидкости.
Один аспект изобретения относится к системам для определения выброса в стволе скважины. Система в соответствии с одним вариантом осуществления изобретения включает в себя акустический датчик, сконфигурированный для того, чтобы получать набор акустических измерений в стволе скважины; схему, сконфигурированную для определения медленности бурового раствора в стволе скважины, из набора акустических измерений, и сравнивать определенную медленность бурового раствора с выбранным критерием, в котором медленность бурового раствора определена из медленности моды жидкости, полученной из набора звуковых измерений; и телеметрического канала связи, сконфигурированного для направления предупредительного сигнала вверх по стволу скважины, когда медленность бурового раствора превышает выбранный критерий.
Один аспект изобретения относится к системам для определения выброса в стволе скважины. Система в соответствии с одним вариантом осуществления изобретения включает в себя акустический датчик, сконфигурированный для приема набора акустических измерений в стволе скважины; средство обработки данных, выполненное с возможностью определения медленности бурового раствора в стволе скважины, из набора акустических измерений, и чтобы сравнивать определенную медленность бурового раствора с выбранным критерием, в котором медленность бурового раствора определена из медленности моды жидкости, выведенной из набора акустических измерений; и средство обработки данных, сконфигурированное для осуществления запуска предупредительного сигнала, когда медленность бурового раствора превышает выбранный критерий.
Другие особенности и преимущества изобретения станут очевидными из последующего описания и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - акустическая каротажная система предшествующего уровня техники.
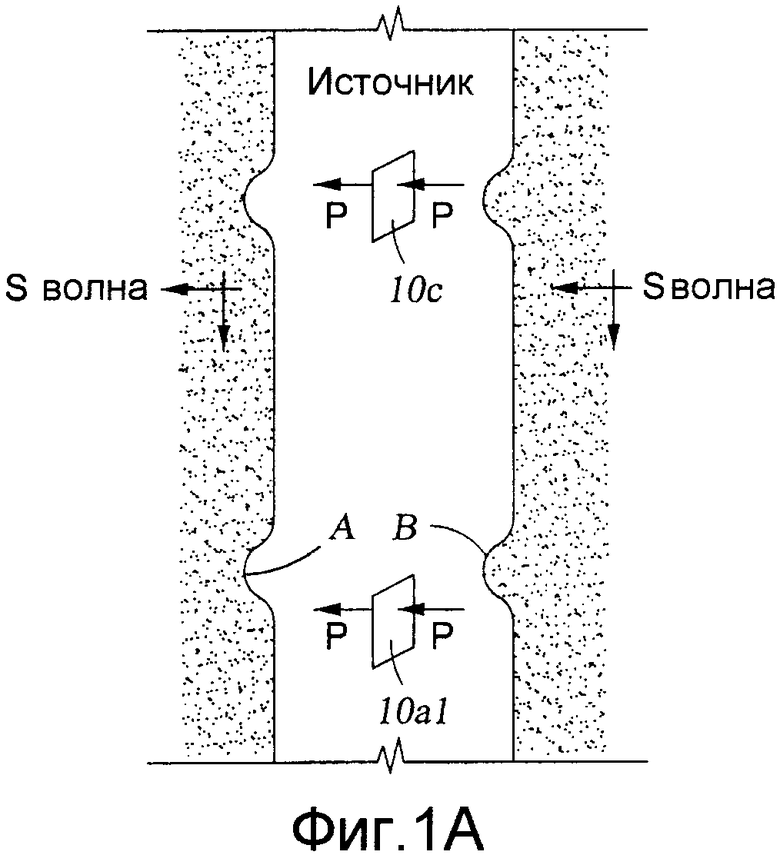
Фиг.1а иллюстрирует акустический каротаж, с использованием традиционного устройства акустического каротажа в стволе скважины.
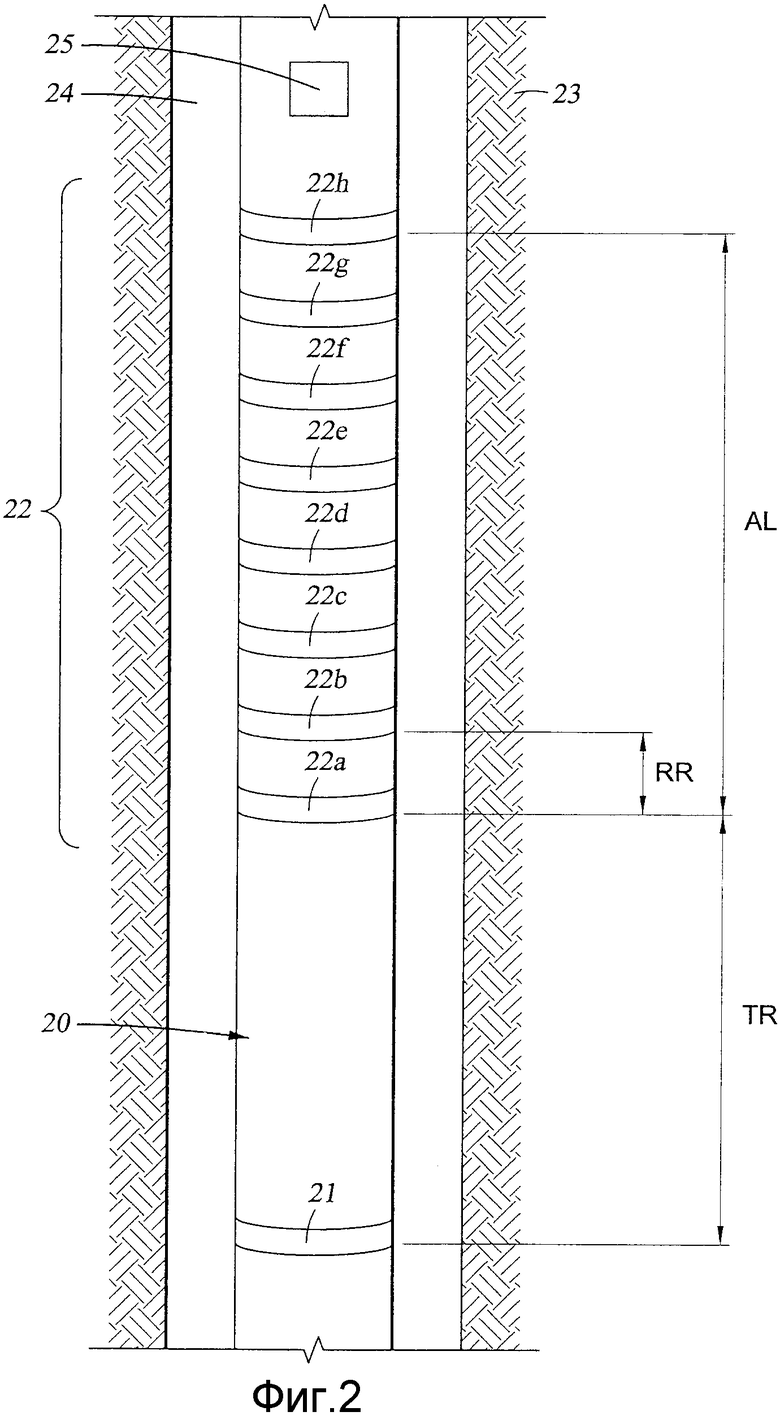
Фиг.2 показывает скважинное устройство акустического каротажа в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг.3 показывает способ для определения медленности бурового раствора в соответствии с одним вариантом осуществления настоящего изобретения.
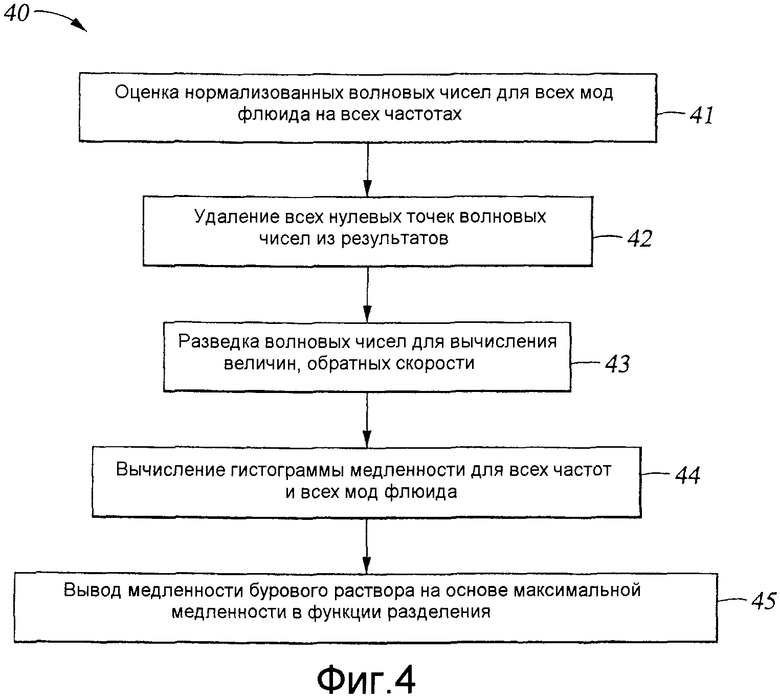
Фиг.4 показывает способ для определения медленности бурового раствора в соответствии с одним вариантом осуществления настоящего изобретения.
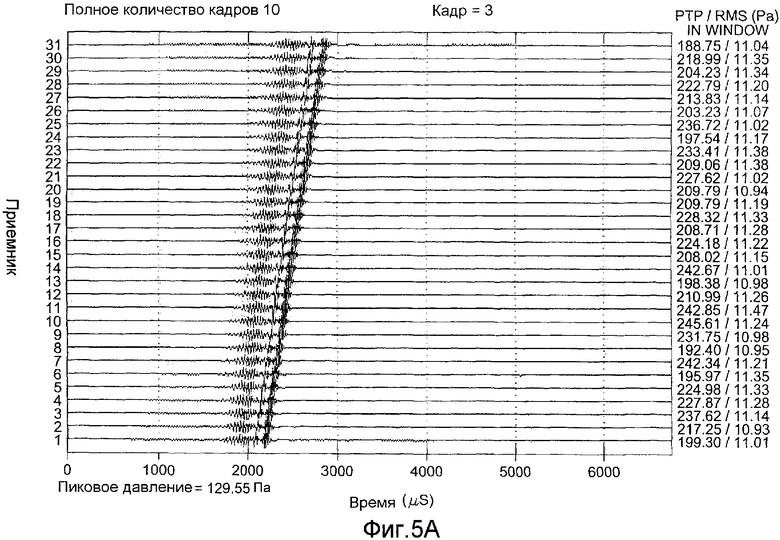
Фиг.5 показывает один пример определения медленности бурового раствора, с использованием способа в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг.6 показывает другой пример определения медленности бурового раствора, с использованием способа в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг.7 показывает способ для мониторинга выброса, с использованием способа в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг.8 иллюстрирует способ для мониторинга выброса в соответствии с одним вариантом осуществления изобретения, при разных условиях образования ствола скважины.
Фиг.9 показывает компьютерную систему из предшествующего уровня техники, которая может быть использована с реализациями настоящего изобретения.
ПРЕДПОЧТИТЕЛЬНОЕ ОПИСАНИЕ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления изобретения относятся к системам и способам для мониторинга и определения выбросов в стволе скважины. Способ в соответствии с вариантами осуществления изобретения относится к измерениям медленности бурового раствора в стволе скважины, для определения выброса. Медленность бурового раствора может быть выведена из величины медленности мод флюидов, которые регулярно наблюдаются в акустических сигналах, но часто рассматриваются в качестве нежелательных компонентов и обычно удаляются в процессе обработки данных.
Выброс вызывается притоком пластовых флюидов, особенно газов, когда происходит бурение в зону избыточного давления без правильного веса бурового раствора, чтобы сбалансировать высокое поровое давление. Пластовые флюиды обычно имеют медленность (величину, обратную скорости), существенно отличающуюся от медленности бурового раствора. Газы просачиваются из пласта в ствол скважины, даже ничтожное количество будет иметь значительное влияние на медленность бурового раствора. Следовательно, мониторинг медленности бурового раствора в стволе скважины, в реальном масштабе времени, может обеспечить раннее предупреждение приближающегося выброса.
Имеются несколько возможных способов для измерения медленности бурового раствора. Одним очевидным способом является проектирование специально предназначенной измерительной подсистемы в оборудовании низа бурильной колонны (BHA), для прямого измерения медленности бурового раствора в скважине. Такая подсистема обычно состоит из сверхзвуковой эхо-импульсной измерительной системы, которая находится в прямом контакте с буровым раствором в стволе скважины. Благодаря жестким условиям среды, окружающей ствол скважины, было бы вызовом спроектировать устойчивую звуковую систему на внешней стороне воротника бура.
Альтернативой выделенной системе измерения является оценка медленности бурового раствора, из акустических каротажей, которые регулярно получаются в операциях каротажа. Изобретатель настоящего изобретения обнаружил, что медленность бурового раствора может быть выведена из высокочастотных асимптотик разных мод жидкости, которые регулярно наблюдаются в акустических сигналах, но часто рассматриваются в качестве нежелательных компонентов и пропускаются при обработке. Совместно рассматриваемая патентная заявка США №10/710128 от 21 июня 2004 раскрывает способы для использования медленности моды жидкости, для оценивания медленности бурового раствора. Эта совместная заявка принадлежит настоящему правопреемнику и, тем самым, включена в описании посредством ссылки во всей ее полноте.
Способы согласно настоящему изобретению могут быть реализованы на практике с устройствами акустического каротажа, которые оборудованы широкополосными высокочастотными источниками. Такое устройство может базироваться на традиционной конструкции устройства с модификациями. На Фиг.1 показана традиционная акустическая система регистрации во время бурения (LWD). Как показано, устройство 5 акустического каротажа встроено в бурильную колонну 6, перемещающуюся в стволе 1 скважины в пласте 8. Устройство 5 присоединено внутри бурильной колонны 6 над буровой коронкой 7. Бурильная колонна 6 определяет наружную поверхность 17 колонны и желоб 9 бурового раствора. Устройство 5 акустического каротажа включает в себя передатчик 10, который может быть монопольным, дипольным, квадрупольным или источником более высокого порядка полюса. Устройство 5 также включает в себя множество приемников 11, разнесенных друг от друга, с формированием продольной группы 12 и электронной схемы 13 приемников. В то время как Фиг.1 иллюстрирует одну определенную конфигурацию традиционного устройства 5 акустического каротажа, в котором передатчик 10 размещен над продольной группой 12, специалисту в данной области техники должно быть понятно, что устройство акустического каротажа может иметь другие конфигурации. Например, некоторые устройства могут включать в себя передатчик, расположенный под продольной группой, в то время как другие устройства могут иметь два передатчика, симметрично расположенных над и под продольными группами, чтобы облегчить компенсацию ствола скважины. Следовательно, отдельная конфигурация, проиллюстрированная на Фиг.1, не предназначена для ограничения объема изобретения.
Сооружения 14 на поверхности включают в себя опору бурильной колонны и приводные механизмы (не показаны). Батареи или забойный турбинный двигатель (не показан) в устройстве 5 акустического каротажа обеспечивают энергией передатчик 10 и электронные схемы 13 приемников. Бурильная колонна предоставляет данные глубины регистратору 15 глубины. Процессор 16 дисперсионной временной когерентности медленности производит анализ дисперсионной временной когерентности медленности для цифровых данных от устройства и использует записанные временные данные для связи данных глубины с данными сигнала. Устройство 5 акустического каротажа по Фиг.1 описано более детально в патентной заявке США No. 6631327, выданной Hsu et al., и передан настоящему правопреемнику.
Фиг.1а иллюстрирует функцию дипольного передатчика. На Фиг.1а дипольный передатчик создает позитивную волну А сжатия, с одной стороны поршня 10а1, и негативную волну В сжатия, с другой стороны поршня. Позитивная волна А и негативная волна В распространяются вверх по пласту к приемнику 10с. Приемник 10с передает дипольные формы волны процессору 16, находящемуся на поверхности, используя традиционные телеметрические средства. В качестве альтернативы, измеренные формы волн могут быть сохранены в устройстве 5 акустического каротажа для скважинной обработки данных или для дальнейшего считывания данных. Позитивные и негативные волны А и В, созданные дипольным передатчиком, каждая из которых может включать в себя поперечную упругую волну (S-волну), волну сжатия (Р-волну) и волну изгиба.
В соответствии с вариантами осуществления изобретения устройство акустического каротажа (акустический датчик) может включать в себя передатчик, выполненный с возможностью формирования широкополосных высокочастотных сигналов и массив преобразователей (приемников), оптимизированных для измерения относительно высокочастотных сигналов. На Фиг.2 показано устройство 20 акустического каротажа в соответствии с одним вариантом осуществления изобретения. Как показано, устройство 20 акустического каротажа расположено в стволе 24 скважины, который проходит сквозь пласт 23. Устройство 20 акустического каротажа включает в себя передатчик 21 и продольную группу 22, которая включает в себя 8 приемников 22а - 22h. Передатчик и приемники могут быть пьезоэлектрическими или преобразователями других типов. Специалисту в данной области техники должно быть понятно, что количество приемников в группе приведено только для иллюстрации и не ограничивает объем настоящего изобретения.
Передатчик 21 предпочтительно является широкополосным передатчиком, который может работать в относительно широком частотном диапазоне, который покрывает относительно высокие частоты. Для эффективного возбуждения моды флюида для определения медленности бурового раствора верхние диапазоны частот (например, 30 килогерц или выше), обеспечиваемые передатчиком в настоящем изобретении, обычно выше, чем диапазоны (обычно выше 20 килогерц), использующиеся в традиционном устройстве акустического каротажа. Например, некоторые варианты осуществления настоящего изобретения могут передавать сигналы от 0 килогерц до 30 килогерц, в то время как другие варианты осуществления настоящего изобретения могут быть способны даже к более широким и более высокочастотным диапазонам, таким как от 5 килогерц до 500 килогерц. Предпочтительные варианты осуществления настоящего изобретения могут передавать сигналы от 10 килогерц до 100 килогерц. В некоторых вариантах осуществления настоящего изобретения использованные частоты оптимизированы для определенного типа исследуемого пласта и ствола скважины, когда больше энергии передано в диапазоне частот, который может эффективно возбуждать моды флюида в определенной комбинации пласт-ствол скважины. Передатчик 21 может быть монопольным, дипольным, квадрупольным или источником более высокого порядка полюса. Аналогично, предпочтительно чтобы приемники (преобразователи) 22 в массиве были восприимчивы к относительно высоким частотам и широкому частотному диапазону, как и передатчик 21. Приемник может быть монопольным, дипольным, квадрупольным или приемником более высокого порядка полюса. Желательно, чтобы тип приемника подходил типу передатчика.
Расстояние между передатчиком 21 и первым приемником 22а, TR, может варьироваться в широком диапазоне, но предпочтительно от 3 футов [0.9 метров] до 20 футов [6.1 метра]. TR короче, чем 3 фута [0.9 метров], может не обеспечить достаточного пространства, чтобы настроить моду флюида. TR длиннее, чем 20 футов [6.1 метра], вероятно, потребовало бы передатчика большой мощности, что часто ограничено скважинными условиями.
Расстояния между приемниками RR, желательно, чем меньше, тем практичнее, для уменьшения эффектов наложения. Из-за того, что передатчик 21 устройства 20 акустического каротажа спроектирован для передачи сигналов на относительно высоких частотах, расстояния между приемниками RR могут быть меньше, чем соответствующие расстояния в традиционном устройстве акустического каротажа. В некоторых вариантах осуществления настоящего изобретения расстояния RR могут варьироваться от дюймов [сантиметров] до 1 фута [0.3 метра], предпочтительно от 0.1 фута [3 сантиметра] до 0.4 футов [12.2 сантиметра].
Длина массива (AL), то есть длина продольной группы, может также варьироваться в широком диапазоне. AL предпочтительно варьируется в диапазоне 2-5 фута [0.6-1.5 метра]. Предпочтительное устройство акустического каротажа в соответствии с вариантами осуществления настоящего изобретения в идеале имеет большое AL и малое RR. Однако число приемников в таком идеальном устройстве акустического каротажа должно бы быть большим, что привело бы к удорожанию и могло бы создать конструктивные проблемы. Таким образом, число приемников и расстояния RR должны быть выбраны таким образом, чтобы устройство акустического каротажа работало эффективно, но без чрезмерных затрат. В некоторых вариантах осуществления настоящего изобретения расстояния RR лежат в диапазоне от 0.05 футов [1.5 сантиметров] до 1 фута [0.3 сантиметров], предпочтительно от 0.1 фута [3 сантиметров] до 0.4 футов [12.2 сантиметров], и число приемников в массиве варьируется от 3 до 100, предпочтительно от 4 до 30. Например, было найдено, что массив с 8 приемниками с расстоянием RR 0.4 фута [12.2 сантиметра] обеспечивает очень хорошие результаты.
Устройство акустического каротажа 20 также включает в себя устройство (схему) 25 обработки, которое может включать в себя процессор и память. Устройство 25 обработки может контролировать передачу источника 21 и получение измерений формы волны продольной группой 22. К тому же, устройство 25 обработки может выполнять скважинную обработку, чтобы вычислять медленность бурового раствора, сохранять вычисленную медленность бурового раствора, как функцию времени или как функцию глубины скважины, сравнивать вычисленную медленность бурового раствора с величинами, определенными ранее, или отобранным заранее критерием, чтобы видеть, обнаружен ли выброс, и посылать предупредительный сигнал, когда условие выброса выполнено. Обратите внимание на то, что эти функции могут также быть выполнены компьютером на поверхности (например, компьютером 16 на Фиг.1). Линия связи между устройством 20 акустического каротажа и компьютером на поверхности может быть осуществлена при помощи телеметрии по гидроимпульсному каналу связи или любых других известных средств в данной области техники.
Вышеописанному передатчику и системе приема не обязательно быть системой исключительно для измерения медленности бурового раствора. Фактически хорошим экономическим проектом является включение широкополосного преобразователя и системы получения данных для измерения медленности бурового раствора в традиционное устройство так, чтобы одна и та же аппаратная система могла быть использована как для регулярных акустических измерений медленности (P & S величины, обратные скорости) в диапазоне от 0-20 килогерц, так и для измерений медленности бурового раствора (через моды флюида) в высокочастотном диапазоне (например, диапазон 10-100 килогерц). Некоторые варианты осуществления настоящего изобретения предусматривают источник и продольную группу, способные как к регулярным измерениям медленности, так и к измерению медленности бурового раствора. Измерения медленности бурового раствора (с широкополосными высокочастотными импульсами), может работать в одинаковом или отличном цикле зажигания от цикла для регулярных измерений P & S волн.
Способ согласно изобретению включает в себя определение медленности бурового раствора посредством использования устройства акустического каротажа, снабженного широкополосными высокочастотными преобразователями для выполнения акустического каротажа в стволе скважины. Широкополосный высокочастотный каротаж спроектирован, чтобы возбуждать различные моды флюида в диапазоне частот, в котором медленность мод флюида приближается к медленности бурового раствора. Как только данные измерения (формы волны) доступны, определяются моды флюида в данных измерения. Затем медленность бурового раствора определяется из медленности разных мод флюида в высокочастотном диапазоне.
Способы согласно изобретению базируются на открытии того, что медленности разных мод флюида лимитируются медленностью бурового раствора, в высокочастотном диапазоне. Таким образом, дисперсионные кривые медленности различных мод флюида будут асимптотически приближаться к предельному значению (медленности бурового раствора) в высокочастотной зоне. Соответственно предельная медленность, которая представляет собой верхний предел дисперсионных кривых для медленности различных мод флюида, может рассматриваться как медленность бурового раствора. Специалисту в данной области техники должно быть понятно, что разные способы могут быть изобретены, чтобы обнаружить этот предел. Например, алгоритм извлечения медленности бурового раствора может базироваться на обнаружении медленности для компонента волны (мода флюида), которая имеет пологую дисперсионную кривую в заданном частотном диапазоне, определенного как [fmin fmax], и в пределах заданного диапазона медленности бурового раствора, определенной [Smin Smax].
На Фиг.3 показано схематическое изображение способа для определения медленности бурового раствора в соответствии с одним вариантом осуществления изобретения. Как показано, способ 30 включает в себя этап получения измерений, с использованием устройства, пригодного для широкополосных высокочастотных измерений, такого как описан выше (этап 32). Измерения включают в себя измерения на достаточно высоких частотах, чтобы позволить получение медленности бурового раствора из асимптотик мод флюида. Обычно диапазон частоты включает в себя диапазон от около 5 килогерц до около 500 килогерц, предпочтительно от около 10 килогерц до около 100 килогерц. Далее разные моды флюида и их медленности, как функции частот, определяются из данных измерения (этап 34). Этапы, включенные в это определение, будут описаны более детально со ссылкой на Фиг.4. Эти моды флюида могут включать в себя волны Стоунли. Эти результаты могут быть изображены как медленности, как функция частоты, чтобы показать изменения медленности для разных мод флюида, как функции частот возбуждения. Как только эти параметры определены, медленность бурового раствора может быть обнаружена из асимптотических подходов разных мод флюида к предельным значениям, которые представляют собой медленность бурового раствора (этап 36). В некоторых реализациях способ может далее включать в себя этап маркирования (или определения) мод флюида, которые будут использованы для определения медленности бурового раствора (этап 35). Этап маркирования предупреждает погрешность волн Стоунли для моды флюида, особенно в быстром пласте с маленьким стволом скважины. Это обсуждается подробно со ссылкой на Фиг.7 ниже.
На Фиг.4 показан способ 40 для определения разных мод флюида из данных измерения (например, этап 34 на Фиг.3). Как показано, процесс начинается с оценивания нормированных волновых чисел для всех мод флюида на всех частотных компонентах (этап 41). Оценка может использовать любой известный способ в данной области техники, включая способ Прони. See Parks et al., “Digital Filter Design”, pp.226-228, Wiley & Sons, New York, 1987. Нормированные волновые числа оцениваются для всех мод флюида на всех частотных компонентах и для всех частот в пределах диапазона частот, используемого в измерениях. Так как приемники в массиве спроектированы для того, чтобы обеспечивать, по меньшей мере, два измерения формы волны на высокочастотном компоненте, максимальное количество волновых чисел обычно не больше, чем половина от числа приемников (или измеренных форм волны). Например, волновые числа Kj(fi) оценены для всех мод флюида j=1, …, n на всех частотных компонентах, центрированных на частоте fi, где n ≤ (размер массива форм волны)/2 и fmin<fi<fmax (fmin и fmax могут быть минимальными и максимальными частотами, используемыми в измерениях).
Нормированные волновые числа Kj(fi), оцененные таким способом, проверяются, и любые точки с нулевым значением могут быть удалены, чтобы упростить анализ (этап 42). Хотя удаление точек с нулевым значением упростило бы последующие процессы, этот этап является необязательным.
Для учета эффектов наложения может потребоваться несколько раз развернуть нормированные волновые числа, чтобы достичь правильной медленности, связанной с волновым числом. На этапе 43, на основе максимальной ожидаемой медленности бурового раствора Smax и максимальной частоты fmax, используемой в измерениях, вычисляется число витков, необходимое для развертывания нормированных волновых чисел Kj(fi). Максимальное число витков (m_max) задается следующим образом:

где ceil означает округление значения до следующего более высокого целого числа и RR - это расстояние между приемниками (см. Фиг.2). Нормированные волновые числа разворачиваются, чтобы вычислить соответствующую медленность, Sjm(fi).
Как только нормированные волновые числа «развернуты», медленность для разных компонент волны может быть подсчитана (этап 44). Это осуществляется при помощи вычисления медленности для каждого компонента волны Sjm(fi) на каждой частоте fi для каждого витка m из нормированного волнового числа Kj(fi) при частотном компоненте fi согласно:

где j=1, …, n; и m=0, 1, …, m_max.
Далее способ может включать в себя вычисление гистограммы Sjm(fi) для всех fi, j и m (этап 45). Как отмечено выше, медленности для разных мод флюида асимптотически приближаются к значению, ограниченному медленностью бурового раствора. Таким образом, медленность на максимуме функции распределения (из гистограммы) может быть выведена как медленность бурового раствора. Функция распределения сама по себе может также быть выведена с целью контроля качества, подобно S/T проекции из обработки временной когерентности величин, обратных скорости (STC processing).
В результате шума, эффекта наложения или интерференции волны Стоунли, возможно, что медленность на максимуме распределения не является медленностью бурового раствора. Это особенно так для условий твердого пласта и маленькой скважины. С функцией распределения для контроля качества возможно понять, когда эта ситуация встречается. Если допускается, что эта ситуация встретится, возможно использовать дополнительную информацию (или из смежных глубин, или из известных внешних ограничений), чтобы «снова маркировать» (выбрать) медленность другой моды флюида (на наименьшем пике функции распределения), для получения медленности бурового раствора.
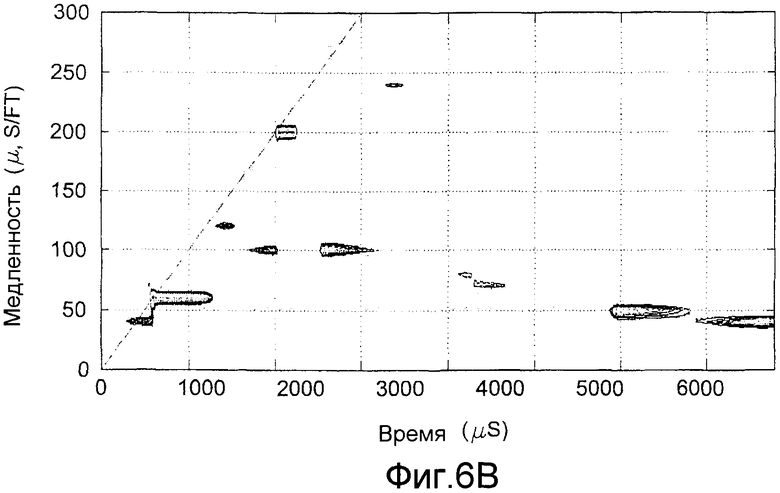
Применение способа для определения медленности бурового раствора, как описано выше, проиллюстрировано на Фиг.5 и 6, которые показывают результаты из двух очень разных ситуаций. На Фиг.5 показаны результаты для случая устройства акустического каротажа на воротнике бура 6,75 дюймов [17 сантиметров] в небольшом стволе скважины (HD=8,62 дюймов [21,9 сантиметров], DTm=200 us/f), проникающего в твердый пласт (DTc=70 us/f, DTs=150 us/f). На Фиг.6 показаны результаты для случая устройства акустического каротажа на воротнике бура 6,75 дюймов [17 сантиметров] в большом стволе скважины (HD=12,5 дюймов [31,7 сантиметров], DTm=200 us/f), проникающем в слабый пласт (DTc=100 us/f, DTs=300 us/f). На обоих чертежах верхние графики (А) показывают модель форм волны, как записано продольными группами, средние графики (В) являются плоскостями медленность-время, показывающими медленность и время для разных компонент волны, обнаруженных методом подобия (см. Kimball et al., Geophysics, Vol.49, pp.264-281, 1984), а нижние графики (С) являются дисперсионными кривыми, полученными из модельных форм волны при помощи способа Прони в соответствии с одним способом изобретения (например, способ 40 на Фиг.4).
На Фиг.5C показано, как волна Стоунли (кривая 51) и две моды флюида (кривые 52 и 53) заметно возбуждены. Кроме того, некоторые другие моды флюида также заметны из графика. Из графика следует, что большинство мод флюида не возбуждены до тех пор, пока номинальная частота относительно высокая. Например, мода флюида самого низшего порядка (кривая 52) возбуждена частотами в 10 килогерц и выше, в то время как другая мода флюида (кривая 53) не возбуждается частотами ниже, чем 50 килогерц. Таким образом, некоторые из этих мод флюида не обнаруживаются при использовании традиционного устройства акустического каротажа.
На Фиг.5С также показано, что медленность моды жидкости самого низшего порядка (кривая 52) начинается приблизительно при 150 us/f (которая является медленностью сдвига в данном случае) при около 10 килогерц и постепенно увеличивается с ростом частот. Медленность моды флюида постепенно увеличивается и асимптотически приближается к предельному значению медленности бурового раствора в диапазоне 80-100 килогерц. Это максимальное значение может быть определено разными способами, например аппроксимацией дисперсионной кривой 52 или использованием гистограммы (например, этап 44 на Фиг.4).
Аналогичным образом другие моды флюида (например, кривая 53) могут также быть использованы, чтобы определять медленности бурового раствора. Однако в большинстве случаев мода флюида низшего порядка (кривая 52) предпочтительна, потому что наиболее заметно возбуждена, возбуждена на относительно низких частотах и приближается к медленности бурового раствора на относительно низких частотах.
Отметим, что на Фиг.5C показано, как медленность бурового раствора, как для кривой 52, так и для кривой 53 мод флюида, ограничена медленностью волны Стоунли (кривая 51). Волна Стоунли заметно возбуждена в большинстве акустических каротажей. Таким образом, дисперсионная кривая волны Стоунли может быть всегда использована, чтобы обеспечить верхний предел медленности бурового раствора, даже если никакие другие моды флюида не различимы.
Результаты, показанные на Фиг.5С, предназначены для твердого пласта и небольшого ствола скважины, ситуация, которая требует более высоких частот возбуждения, чтобы выявлять асимптотическое приближение моды флюида к медленности бурового раствора. В отличие от этого, Фиг.6С показывает результаты для мягкого пласта и широкого ствола скважины, ситуации, в которой больше акустической энергии передается по столбу бурового раствора. Как показано на Фиг.6С, дисперсионная кривая моды флюида с низшим порядком (кривая 61) достигает медленности бурового раствора, в диапазоне 10 килогерц, гораздо ниже, чем это требуется в ситуации, показанной на Фиг.5С. Это потому, что разные моды флюида более эффективно возбуждаются звуковым источником при мягком пласте и относительно широком стволе скважины. Результаты, показанные на Фиг.5С и 6С, характерны для двух пределов, которые часто встречаются в акустических каротажах. Большинство буровых скважин, вероятно, попадают между этими двумя случаями.
Отметим, что вышеописанные акустические измерения и обработка данных могут быть выполнены внизу скважины или на поверхности. Как только медленность бурового раствора может быть точно определена, возможно контролировать изменения в свойствах бурового раствора в стволе скважины. Например, медленность бурового раствора можно использовать для контролирования или определения притока пластового флюида в столб бурового раствора (то есть, выброс). В мониторинге выброса направление изменения медленности бурового раствора, как функции времени или функции глубины буровой скважины (во время бурения), устанавливается в качестве базисной линии. Обычно медленность бурового раствора будет очень медленно меняющейся переменной. Любое внезапное изменение в медленности бурового раствора может означать возможный приток пластовых флюидов и, следовательно, запустит предупредительный сигнал. Приток пластовых флюидов будет возникать почти постоянно, когда буровая коронка проникает в зону избыточного давления. Таким образом, этот предупредительный сигнал от медленности бурового раствора будет приходить раньше, чем от многих других петрофизических измерений в реальном времени, таких как компрессионное дельта-t и удельное сопротивление, где точки измерений, как правило, получаются за много футов после бура. Компрессионное дельта-t и удельное сопротивление являются одними из традиционных измерений в реальном времени, которые используются, чтобы определять зоны избыточного давления по корреляции.
Фиг.7 иллюстрирует способ в соответствии с одной реализацией настоящего изобретения для определения выброса в стволе скважины. Как показано, способ 70 может запускаться при получении звуковых измерений, которые предпочтительно получаются устройством, имеющим широкополосный высокочастотный источник (этап 72). Как только акустические измерения доступны, медленность бурового раствора определяется из величины, обратной скорости моды флюида, например, при помощи асимптотического приближения медленности моды флюида к предельному значению, то есть медленности бурового раствора (этап 74). Способ для такого определения описан подробно выше со ссылкой на Фиг.3 и 4. Медленность бурового раствора, определенная таким образом, записывается и/или сравнивается с медленностью бурового раствора, записанной ранее (этап 76). Если медленность бурового раствора выше уровня запуска (заранее выбранный критерий), то предупредительный сигнал посылается вверх по стволу скважины к бурильщику или инженеру (этап 78). Способ, показанный на Фиг.7, может быть использован во время бурения или других этапов операции (например, для мониторинга эксплуатационной скважины).
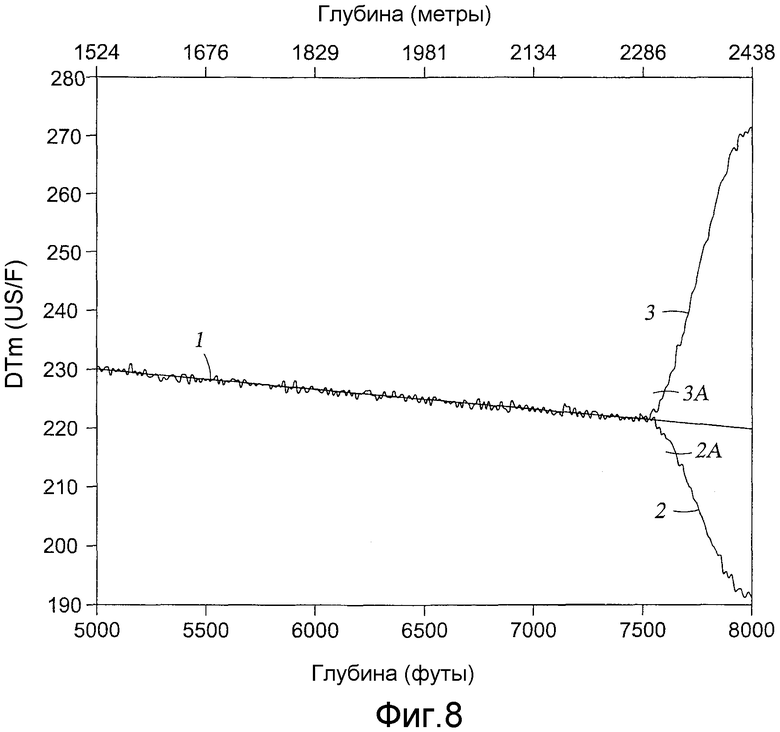
На Фиг.8 показан один вариант осуществления настоящего изобретения, используемый для контролирования выброса, когда скважина бурится. В соответствии с этим вариантом осуществления медленность бурового раствора, как функция глубины, может быть использована для обнаружения любых нетипичных изменений в медленности бурового раствора. На Фиг.8 показан график (кривая 1) медленности бурового раствора, как функции глубины в скважине, бурящейся с обычным буровым раствором на углеводородной основе. Кривая 1 показывает постепенное изменение как функцию глубины. Это вызвано тем, что температура и давление меняются с изменением глубины. Это изменение постепенно и предсказуемо. Таким образом, возможно установить ограничение (уровень запуска) для отклонения от нормального изменения, выше которого считалось бы, что произошло что-то неожиданное (например, приток пластовых флюидов).
Приток пластовых флюидов из зон избыточного давления будет отклонять медленность бурового раствора (DTm) от нормального изменения. При притоке газа DTm будет чрезмерно увеличиваться. При притоке воды DTm будет существенно уменьшаться. Система раннего предупреждения в соответствии с реализациями настоящего изобретения будет улавливать начинающийся приток и давать бурильщику некоторое ценное время, чтобы прореагировать. Действия бурильщика могут минимизировать ущерб или даже предотвратить выброс от полного развития.
Уровни запуска могут быть установлены относительно ожидаемых значений DTm или относительно скорости изменения. Если устанавливать относительно ожидаемого значения DTm, то уровень запуска может быть на определенный процент (или определенное значение медленности) выше или ниже ожидаемого значения. В качестве альтернативы, уровень запуска может быть установлен относительно множества стандартных отклонений от ожидаемых значений DTm. Более того, уровень запуска может быть установлен относительно ожидаемой скорости измерения (например, постепенное убывание) значений DTm.
На Фиг.8 кривая 2 имитирует приток воды на глубине больше, чем 7500 футов [2286 метров]. Приток воды значительно меняет значения DTm в этой зоне. Нижний предел 2А может быть установлен как уровень запуска для притока воды в ствол скважины. Как только значения DTm падают ниже этого уровня запуска, датчик может посылать предупреждение с тем, чтобы бурильщик знал о притоке и мог предпринять соответствующие действия.
Аналогично кривая 3 на Фиг.8 имитирует гипотетический приток пластового флюида (например, газа) в ствол скважины. Приток газа значительно увеличивает значения DTm в этой зоне. Верхний уровень запуска 3А может быть установлен, чтобы давать сигнал о таком притоке. Отметим, что различные предупредительные сигналы могут быть посланы для притока воды и притока газа, если требуется.
На Фиг.8 проиллюстрирована буровая скважина, бурящаяся с использованием бурового раствора на углеводородной основе. Реализации изобретения могут также быть использованы для контролирования ствола скважины после бурения (например, контролировать освоенную скважину). В этом случае один или более акустических датчиков могут быть размещены на разных глубинах в стволе скважины для обеспечения акустических измерений. Акустические измерения используются для выведения медленности бурового раствора, как описано выше. Данные, характеризующие медленность бурового раствора, сравниваются с ранее записанными данными, то есть медленность бурового раствора контролируется в течение промежутка времени. Любые изменения в стволе скважины (например, выброс), которые меняют медленность бурового раствора, могут запускать аварийный сигнал, чтобы промысловые инженеры были уведомлены о возможных проблемах. Система аварийной сигнализации может быть реализована с использованием любых подходящих средств, известных в данной области техники.
Некоторые реализации настоящего изобретения относятся к системам для обнаружения и мониторинга выброса, базируемого на медленности бурового раствора, выведенной из акустических каротажей. Система в соответствии с реализациями изобретения может включать в себя акустический датчик (например, устройство 20 акустического каротажа согласно Фиг.2), устройство обработки данных (25 согласно Фиг.2) или компьютер на поверхности (например, компьютер 16 на Фиг.1) и телеметрический канал связи (например, желоб 9 бурового раствора согласно Фиг.1). Компьютер 16 на поверхности или скважинное устройство 25 обработки данных могут, в общем, называться «схемой». На Фиг.9 показан компьютер общего назначения, который может быть использован как компьютер 16 на поверхности. Скважинное устройство 25 обработки данных может иметь подобные компоненты. Как показано, компьютер на поверхности может включать в себя процессор (91 на Фиг.9), запоминающую среду 92 (например, жесткий диск) и память 93 с произвольной выборкой, в дополнение к устройствам ввода (например, клавиатуре 94 и мыши 95) и устройствам вывода (например, экранному дисплею 96). Память 92 хранит программу, имеющую инструкции для выполнения способа согласно изобретению, как описано выше. Кроме того, некоторые варианты осуществления изобретения относятся к записывающей среде, хранящей программу, которая включает в себя инструкции для выполнения способа согласно изобретению. Записывающая среда может быть любой из известных или позже разработанных сред.
Средства и способы согласно изобретению приносят выгодные преимущества. Варианты осуществления настоящего изобретения предусматривают удобный и эффективный способ для определения выброса в стволе скважины. Примененные в приложениях в процессе бурения раскрытые технологии могут измерять медленность бурового раствора очень близко к буровой коронке для обеспечения раннего предупреждения о начинающемся выбросе. Реализации настоящего изобретения могут быть осуществлены с помощью традиционных устройств акустического каротажа, с или без модификаций. Кроме того, варианты осуществления настоящего изобретения могут быть использованы во время бурения или после бурения (например, для текущего контроля эксплуатационной скважины).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБЫ ИЗМЕРЕНИЯ ИНТЕРВАЛЬНОГО ВРЕМЕНИ ДЛЯ БУРОВОГО РАСТВОРА В БУРОВОЙ СКВАЖИНЕ | 2005 |
|
RU2369884C2 |
| СПОСОБЫ ОБРАБОТКИ ДИСПЕРГИРУЮЩИХ АКУСТИЧЕСКИХ СИГНАЛОВ | 2005 |
|
RU2361241C2 |
| ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ФЛЮИДА ПО ДАННЫМ АКУСТИЧЕСКОГО КАРОТАЖА | 2008 |
|
RU2477369C2 |
| СПОСОБ, СИСТЕМА И СКВАЖИННЫЙ ПРИБОР ДЛЯ ОЦЕНКИ ПРОНИЦАЕМОСТИ ПЛАСТА | 2007 |
|
RU2419819C2 |
| СИСТЕМА ДВУСТОРОННЕЙ ТЕЛЕМЕТРИИ ПО БУРИЛЬНОЙ КОЛОННЕ ДЛЯ ИЗМЕРЕНИЙ И УПРАВЛЕНИЯ БУРЕНИЕМ | 2006 |
|
RU2413841C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ФИЛЬТРАЦИОННЫХ ПОТЕНЦИАЛОВ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОДЗЕМНОГО ПЛАСТА | 2009 |
|
RU2478991C2 |
| ПРИБОР И СПОСОБ КАРОТАЖА СКВАЖИНЫ ПОСРЕДСТВОМ РАДИОЛОКАТОРА МНОГОКОМПОНЕНТНЫХ СИГНАЛОВ | 2011 |
|
RU2596909C2 |
| ОЦЕНКА ТРЕЩИНОВАТОСТИ В СКВАЖИНАХ С ОБСАЖЕННЫМ СТВОЛОМ | 2014 |
|
RU2652394C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ФИЛЬТРАЦИОННЫХ ПОТЕНЦИАЛОВ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОДЗЕМНОГО ПЛАСТА | 2005 |
|
RU2402048C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЛЬТРАЦИОННЫХ ПОТЕНЦИАЛОВ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОДЗЕМНОГО ПЛАСТА | 2008 |
|
RU2453873C2 |








Изобретение относится к обнаружению выброса и к мониторингу в стволе скважины. Техническим результатом является раннее предупреждение выброса для дальнейшего улучшения безопасности операций подземной разведки и добычи. Способ для определения выброса в стволе скважины включает в себя получение набора измерений с помощью устройства акустического каротажа в стволе скважины, определение медленности бурового раствора из набора измерений и сравнение медленности бурового раствора с выбранным критерием, где определение медленности бурового раствора включает в себя этапы, на которых определяют медленность моды флюида как функцию частоты для, по меньшей мере, одной моды флюида, и определяют медленность бурового раствора из медленности моды флюида. 2 н. и 8 з.п. ф-лы, 14 ил.
1. Способ для определения выброса в стволе (1) скважины, включающий в себя этапы, на которых
получают набор измерений с помощью устройства (20) акустического каротажа в стволе скважины;
определяют медленность бурового раствора из набора измерений и сравнивают медленность бурового раствора с выбранным критерием, отличающийся тем, что
определение медленности бурового раствора включает в себя этапы, на которых определяют медленность моды флюида, как функцию частоты для, по меньшей мере, одной моды флюида, и определяют медленность бурового раствора из медленности моды флюида.
2. Способ по п.1, в котором определение медленности моды флюида как функции от частоты содержит этапы, на которых
оценивают нормализованные волновые числа для, по меньшей мере, одной моды флюида;
развертывают нормализованные волновые числа для вычисления медленности моды флюида, для, по меньшей мере, одной моды флюида на всех частотах и
формируют гистограмму медленности моды флюида от частоты для, по меньшей мере, одной моды флюида.
3. Способ по п.2, в котором определение медленности бурового потока осуществляется идентификацией максимума медленности моды флюида из гистограммы.
4. Способ по п.1, в котором определение медленности бурового раствора включает в себя этап, на котором определяют максимальную величину медленности, из асимптотического подхода медленности моды флюида, как функции частоты в высокочастотном диапазоне.
5. Способ по п.1, дополнительно содержащий этап, на котором посылают предупредительный сигнал наверх, если медленность бурового раствора превышает выбранный критерий.
6. Система для определения выброса в стволе (1) скважины, состоящая из акустического датчика (22), сконфигурированного для получения набора акустических измерений в стволе скважины и характеризующегося схемой, сконфигурированной для определения медленности бурового раствора из набора акустических измерений и для сравнения определенной медленности бурового раствора с выбранным критерием, где медленность бурового раствора определяется из медленности моды флюида, вычисленной из набора акустических измерений.
7. Система по п.6, в которой медленность бурового раствора определяется из асимптотического подхода медленности моды флюида к предельному значению.
8. Система по п.6, в которой медленность моды флюида определяется с помощью
оценки нормализованных волновых чисел для моды флюида;
развертки нормализованных волновых чисел для вычисления медленности моды флюида, для моды жидкости на всех частотах;
формирования гистограммы медленности моды флюида от частоты для моды флюида.
9. Система по п.8, в которой медленность бурового потока определяется идентифицированием максимума медленности моды флюида из гистограммы.
10. Система по п.6, дополнительно содержащая телеметрический канал связи, сконфигурированный для отправки предупредительного сигнала наверх, если медленность бурового раствора превышает выбранный критерий.
Приоритет: от 21.07.2004 - все пункты формулы изобретения.
| US 6176323 B1, 23.01.2001 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛА ПРОЯВЛЕНИЯ ПЛАСТОВОГО ФЛЮИДА И ПОГЛОЩЕНИЯ БУРОВОГО РАСТВОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2032071C1 |
| US 4208906 А, 24.06.1980 | |||
| US 5154078 А, 13.10.1992 | |||
| US 4733233 А, 22.03.1982. | |||

