Изобретение относится к измерительной технике и может быть использовано в машиностроении при определении продольной и поперечной жесткостей, уводов пружин рессорного подвешивания транспортных средств, локомотивов и вагонов при различных вариантах опирания торцов пружины.
Известны устройства для определения параметров жесткости винтовых пружин сжатия, содержащие основание с жестко установленными на нем направляющими и смонтированную на нем с возможностью осевого перемещения по ним верхнюю опору, снабженную фиксаторами. Для расширения диапазона измеряемых характеристик устройства снабжены расположенной между верхней опорой и основанием промежуточной опорой, связанной с водилами, взаимодействующими с силовыми приводами (Технический отчет №4-14-74 ВНИТИ, УДК 625.2.012.8:539.4(047.1), 1974).
Недостатком этих устройств является следующее.
При определении осевой и поперечной жесткостей пружину нагружают соответствующими силами. Под действием поперечной силы пружина отклоняется от вертикали на некоторый угол φ, а ее торец получит поперечную деформацию Δ. При этом пружина за счет изгиба дополнительно удлинится на величину ΔН, которую можно вычислить по формуле
 ,
,
где Нр - высота пружины под рабочей нагрузкой.
Дополнительное удлинение ΔН разгрузит пружину, что снизит точность определения осевой и поперечной жесткостей.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство, содержащее основание с размещенными на нем параллельно друг другу направляющими (стойками), неподвижную и подвижную в продольном направлении опоры, между которыми размещена испытуемая пружина. Устройство имеет два цилиндрических шарнира, связывающих одни концы стоек с основанием, а другие их концы через два других цилиндрических шарнира связаны с подвижной плитой, образуя четырехзвенник, имеющий возможность поперечного перемещения. Подвижная опора связана со штоком привода осевого нагружения, который проходит через неподвижную плиту. Угловые, линейные перемещения и осевая сила измеряются соответствующими датчиками (патент Российской Федерации №1727012, кл. G01M 5/00, 1993).
Однако вышеуказанное устройство имеет существенные недостатки. Во-первых, из-за осевых зазоров в подшипниках параллелограммного механизма стойки вместе с испытуемой пружиной под действием изгибающих моментов, возникающих при ее осевом нагружении, наклоняются в направлении оси подшипников и трутся о корпуса шарниров при поперечном нагружении пружины. Во-вторых, устройство не позволяет определять «уводы» - поперечные смещения торцов пружины, возникающие при ее осевом нагружении и обусловленные изгибающими моментами из-за неперпендикулярности оси пружины к торцам (строительные перекосы) и эксцентриситетом равнодействующей сил давления на ее торцах. Так, например, для пружины с диаметром прутка 50 мм и высотой (под нагрузкой 65 кН) 562 мм увод достигает 45 мм. Если вектора уводов в пружинах рессорного подвешивания локомотива будут направлены в одну сторону, то это может привести к опрокидыванию кузова. Возникающие при уводе моменты равны:
Мизг1=Рст·l и Мизг2=Рст·Нр·sinα
где Мизг1 - изгибающий момент, возникающий из-за эксцентриситета равнодействующей сил давления на торцах пружины;
Рст - осевая статическая нагрузка на пружину;
l - эксцентриситет равнодействующей сил давления на торцах пружины;
Мизг2 - изгибающий момент, возникающий на торцах пружины из-за неперпендикулярности ее оси к торцам;
Нр - высота пружины под нагрузкой;
α - угол наклона пружины при неперпендикулярности ее оси к торцам.
Задача изобретения - расширить функциональные возможности устройства, а именно обеспечить определение уводов по величине и направлению и повысить точность измерения параметров жесткостей винтовых пружин сжатия.
Поставленная задача решается тем, что устройство для определения уводов и параметров жесткостей винтовых пружин сжатия, содержащее основание и подвижную плиту, связанные между собой двумя параллельными друг другу стойками с шарнирами на концах, при этом на основании закреплена неподвижная опора, предназначенная для установки на ней испытуемой пружины, линия центра которой находится в плоскости стоек, а подвижная в продольном и поперечном направлениях опора, предназначенная для закрепления второго торца испытываемой пружины, смонтирована на штоке силового привода осевого нагружения, проходящем через плиту; при этом подвижная опора связана также и с приводом поперечного нагружения пружины; датчики силы и датчики перемещений, выполнено со следующими отличиями: оно снабжено дополнительно третьей стойкой с шарнирами на концах, тоже соединенной с основанием и с плитой и равноудаленной от имеющихся стоек, причем шарниры, расположенные на концах стоек и соединяющие плиту с основанием, выполнены сферическими.
Таким образом, за счет новой совокупности признаков, а именно трех стоек, связанных с основанием и подвижной плитой через три пары сферических шарниров и образующих пространственный параллелограммный механизм, обеспечивается возможность измерения «уводов» как по величине, так и по направлению и более высокая точность измерения осевой и поперечной жесткостей пружины за счет плоскопараллельного движения плиты.
Изобретение поясняется чертежами, на которых представлено предлагаемое устройство для определения уводов и параметров жесткостей винтовых пружин сжатия.
На фиг.1 изображен общий вид;
на фиг.2 - вид сбоку (по стрелке Б);
на фиг.3 - схема размещения стоек и пружины в плане;
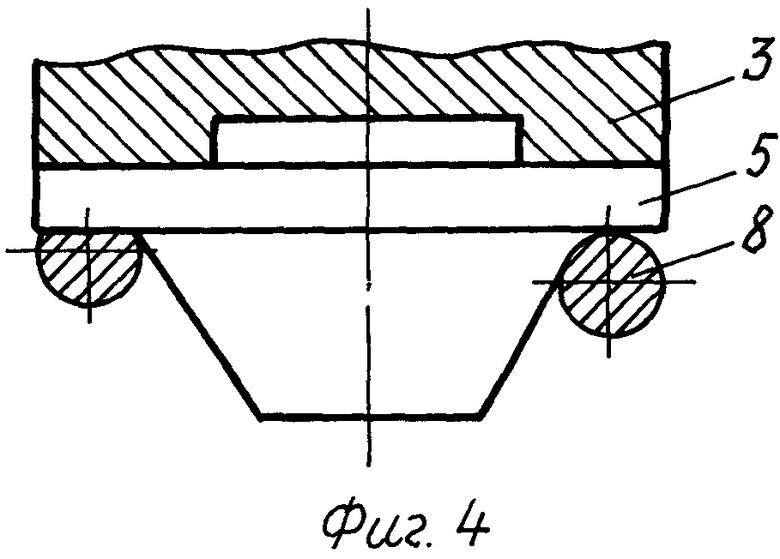
на фиг.4 - вариант промежуточной опоры с жестким опиранием верхнего торца пружины;
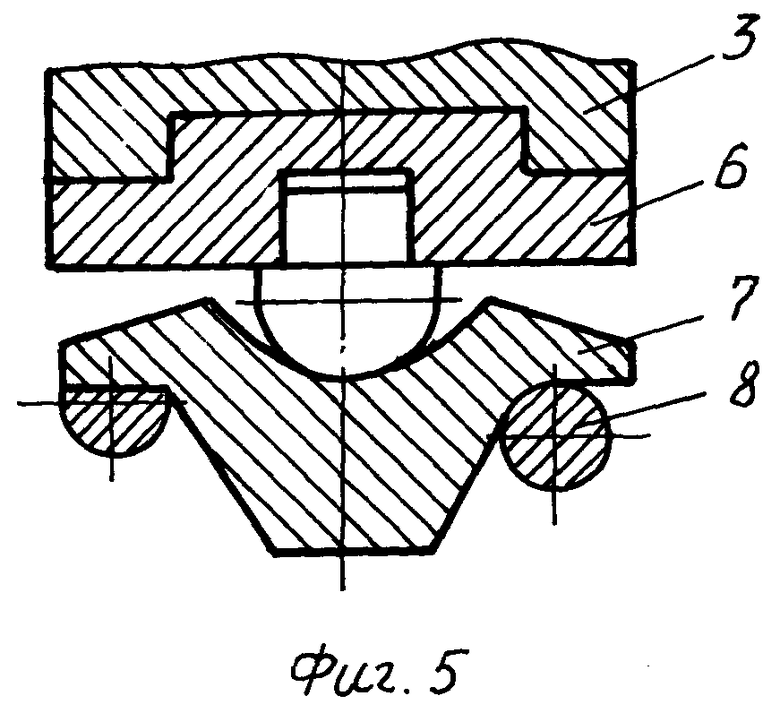
на фиг.5 - вариант промежуточной опоры с шарнирным опиранием верхнего торца пружины;
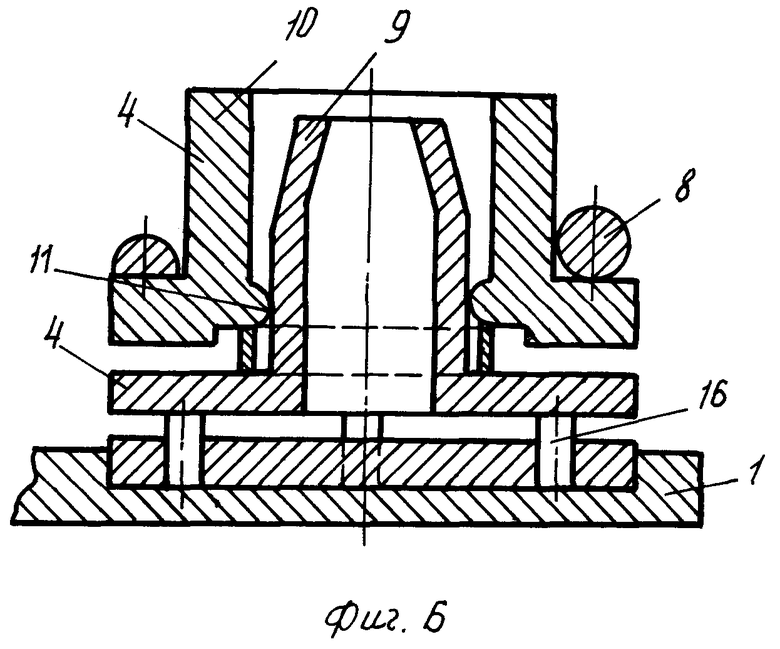
на фиг.6 - конструкция неподвижной опоры для жесткого опирания нижнего торца пружины;
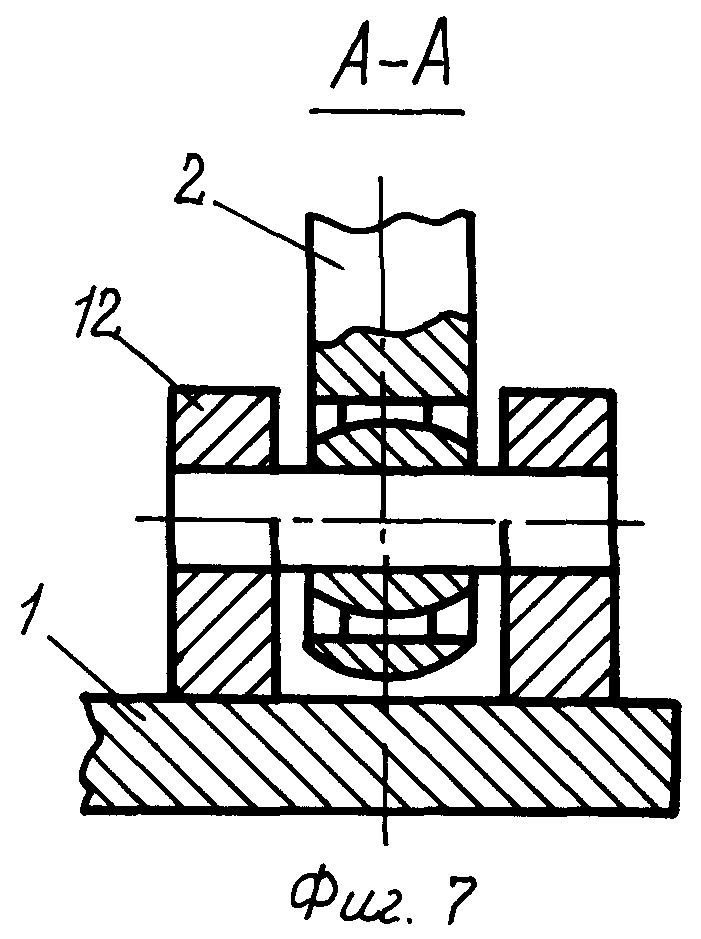
на фиг.7 - конструкция сферического шарнира (сечение А-А).
Устройство для определения уводов и параметров жесткостей винтовых пружин сжатия состоит из основания 1 с установленными на нем тремя стойками 2, равноудаленными друг от друга, подвижной опоры 3 и неподвижной 4. Подвижная опора 3 имеет углубление для установки промежуточной опоры 5, выполненной для двух вариантов опирания верхнего торца пружины: а) жесткого опирания (фиг.4); б) шарнирного опирания (фиг.5). Промежуточная опора 5 (фиг.5) для шарнирного опирания верхнего торца пружины представляет собой универсальный шарнир и состоит из сферической опоры 6, закрепленной в углублении подвижной опоры 3, и направляющего стакана 7, на фланец которого опирается пружина 8, установленная на неподвижной опоре 4. Тип опирания верхнего торца пружины 8 определяется программой испытаний. Неподвижная опора 4 (фиг.6) состоит из направляющего стержня 9, закрепленного на основании 1 в специальном гнезде, и опорного стакана 10, имеющего на внутренней поверхности кольцевой сферический выступ 11. Такая конструкция неподвижной опоры 4 исключает защемление направляющего стержня 9 в опорном стакане 10 и не допускает трение пружины 8 об опорный стакан 10 при ее изгибе во время испытаний. Устройство имеет шесть сферических шарниров 12 (фиг.7), связывающих одни концы стоек 2 с основанием 1, а другие их концы через три других сферических шарнира связаны с подвижной плитой 13, образуя пространственный параллелограммный механизм плоскопараллельного движения, обеспечивающий возможность поперечного смещения подвижной опоры 3 в интервале 0-360°, через плиту 13 проходит шток 14, на котором закреплена подвижная опора 3. Гайка 15 предназначена для фиксирования осевой нагрузки Р, которая измеряется тензометрическим датчиком силы 16, установленным на основании 1 и на который опирается неподвижная опора 4. Сила Q, сдвигающая верхний торец пружины 8, создается сервоприводом, перемещающим в поперечном направлении опоры 3 и 5. Угловые и линейные перемещения торцов пружины измеряются соответственно датчиками 17 и 18, закрепленными кронштейнами 19 на основании 1 по направлению осей опоры 3. Сигналы датчиков 17 и 18 регистрируются соответствующей тензометрической аппаратурой.
Устройство работает в четырех режимах:
- Для определения уводов пружину 8 устанавливают на неподвижную опору 4 и промежуточную опору 5 (фиг.4) для жесткого опирания ее верхнего торца. Включением силового привода осевого нагружения сжимают пружину 8 до заданной нагрузки Р, которую контролируют тензометрическим преобразователем силы 16. После освобождения штока 14 от силового привода стойки 2 под действием изгибающих моментов, возникающих на торцах пружины при ее осевом нагружении, отклоняются на некоторый угол α по направлению вектора результирующего изгибающего момента, а подвижная промежуточная опора 5 вместе с верхним торцом пружины 8 получит «увод» - поперечное смещение. Величину увода измеряют датчиком 18, а направление вектора увода находят по нониусу 20 (фиг.3), установленному на основании 1. Таким образом, предлагаемая конструкция устройства позволяет определять «уводы», что ранее было невозможно.
- Для определения осевой жесткости пружину 8 устанавливают на опоры 4 и 5 (фиг.4) для жесткого опирания верхнего ее торца. Включением силового привода, соединенного со штоком 14, сжимают пружину до предусмотренной программой испытаний силы Р и контролируют ее тензометрическим преобразователем силы 16, а осевую деформацию измеряют датчиком линейных перемещений 18. Три стойки, связанные с основанием 1 и плитой 13 сферическими шарнирами, исключают перекос плиты 13 и обеспечивают более точное измерение осевой жесткости.
- Поперечную жесткость пружины находят следующим образом. Пружину 8, как и в предыдущих режимах, нагружают предусмотренной программой испытаний силой Р. Затем включением привода поперечного нагружения, связанного с подвижной плитой 3, сдвигают верхний торец пружины 8 в поперечном направлении на некоторую величину Δ. При этом стойки 2 наклоняются на угол α, равный
 ,
,
где Нст - высота стойки.
Развиваемую приводом поперечную силу Q определяем по силоизмерителю, входящему в комплект привода. При наклоне пружины 8 ее осевая жесткость несколько уменьшится, что, в свою очередь, приведет к уменьшению осевой нагрузки на пружину 8 при неизменной ее осевой деформации. Тензометрический преобразователь силы 16 зафиксирует падение нагрузки P, после чего включением привода осевого нагружения догружают пружину 8 до требуемой программой испытания величины нагрузки Р и фиксируют ее гайкой 15.
Особенность параллелограммного механизма такова, что при наклоне стоек 2 появляется горизонтальная восстанавливающая сила F, которую легко вычислить из условия равновесия стоек 2:
F=(Р-G1-G2-3G3)tgα,
где Р - осевая сила, сжимающая пружину;
G1 - вес подвижных опор 3 и 5;
G2 - вес плиты 13;
G3 - вес одной стойки;
α - угол наклона стоек.
Очевидно, что сила N, сдвигающая торец пружины в поперечном направлении, равна разности силы Q, развиваемой приводом, и восстанавливающей силы F:
N=Q-(Р-G1-G2-3·G3)·tgα.
Поперечную жесткость пружины находят по формуле  ,
,
где Δ - поперечный сдвиг верхнего торца пружины.
- Для определения технологических погрешностей формы пружины ее без зазора устанавливают на нижнюю опору 4 и промежуточную опору 5 (фиг.5) с шарнирным опиранием верхнего торца. Если испытываемая пружина изготовлена с геометрическими отклонениями формы, то ее верхний торец вместе с направляющим стаканом 7 (фиг.5) получит угловые и линейные перемещения, о величине которых можно судить по показаниям тензометрической аппаратуры, к которой подключены датчики 17 и 18.
Из вышеизложенного видно, что задача определения вектора увода пружины как по величине, так и по направлению решена, и этим самым расширены функциональные возможности устройства; кроме того, пространственный механизм плоскопараллельного движения исключает перекос верхней плиты 13 и тем самым повышает точность измерения параметров жесткости пружины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров жесткости винтовых пружин сжатия | 1989 |
|
SU1727012A1 |
| УСТАНОВКА ДЛЯ КОМПРЕССИОННЫХ ИСПЫТАНИЙ ГРУНТА | 2003 |
|
RU2245963C1 |
| Стенд для динамических испытаний пневматической шины | 1983 |
|
SU1132177A1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765195C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765397C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765585C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765510C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ТОНКИХ ОБРАЗЦОВ НА ИЗГИБ | 2008 |
|
RU2376567C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765388C1 |
| Стенд для исследования портальных рам | 1983 |
|
SU1120201A1 |
Изобретение относится к измерительной технике и может быть использовано в машиностроении для определения параметров жесткости и увода винтовых пружин сжатия. Устройство содержит основание и подвижную плиту, связанные между собой двумя параллельными друг другу стойками с шарнирами на концах. На основании закреплена неподвижная опора, предназначенная для установки на ней испытуемой пружины, линия центра которой находится в плоскости стоек, а подвижная в продольном и поперечном направлениях опора, предназначенная для закрепления второго торца испытываемой пружины, смонтирована на штоке силового привода осевого нагружения, проходящем через плиту. При этом подвижная опора связана также и с приводом поперечного нагружения пружины. Кроме того, устройство снабжено дополнительно третьей стойкой с шарнирами на концах, тоже соединенной с основанием и с плитой и равноудаленной от имеющихся стоек, причем шарниры, расположенные на концах стоек и соединяющие плиту с основанием, выполнены сферическими. Также устройство содержит датчики силы и датчики перемещений. Технический результат заключается в расширении функциональных возможностей, возможности измерения уводов по величине и направлению и повышении точности измерений. 7 ил.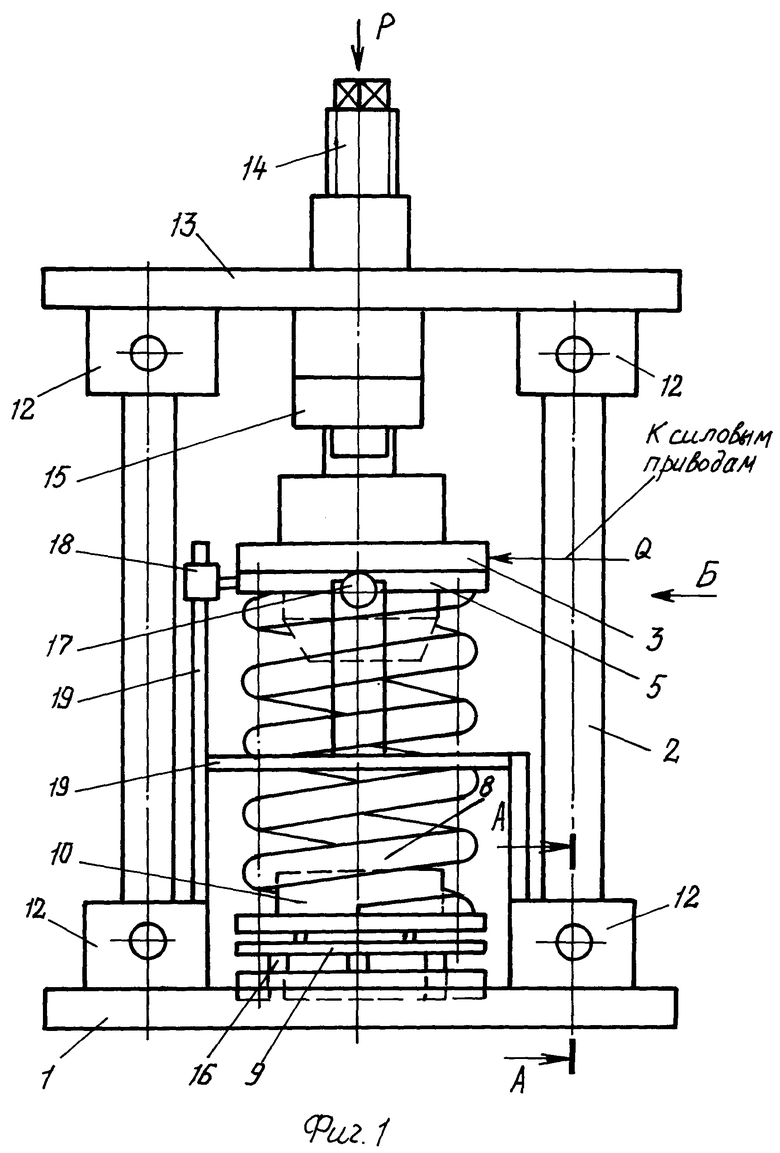
Устройство для определения уводов и параметров жесткостей винтовых пружин сжатия, содержащее основание и подвижную плиту, связанные между собой двумя параллельными друг другу стойками с шарнирами на концах, при этом на основании закреплена неподвижная опора, предназначенная для установки на ней испытываемой пружины, линия центра которой находится в плоскости стоек, а подвижная в продольном и поперечном направлениях опора, необходимая для закрепления второго торца испытываемой пружины, смонтирована на штоке силового привода осевого нагружения, проходящем через плиту, при этом подвижная опора связана также с приводом поперечного нагружения пружины; датчики силы и датчики перемещений, отличающееся тем, что оно снабжено дополнительно третьей стойкой с шарнирами на концах, тоже соединенной с основанием и плитой и равноудаленной от имеющихся стоек, причем шарниры, расположенные на концах стоек и соединяющие плиту с основанием, выполнены сферическими.
| Устройство для определения параметров жесткости винтовых пружин сжатия | 1989 |
|
SU1727012A1 |
| Машинка для нанизывания табачных листьев | 1930 |
|
SU22550A1 |
| Устройство для определения параметров жесткости комплектов цилиндрических пружин рессорного подвешивания транспортного средства | 1976 |
|
SU635401A1 |

