Изобретение относится к области механики твердого тела, а именно к способам управления параметрами фрикционного взаимодействия пар трения.
Известен способ определения анизотропии физико-механических, преимущественно фрикционных, свойств материала (А.с. №705312, кл. МКИ2 G01N 19/02, 1979, БИ №47), заключающийся в том, что пару трения, в зоне контакта которой хотя бы одно из тел обладает анизотропией физико-механических свойств поверхностного слоя, приводят в контакт под действием нормальной силы, задают при помощи привода движения необходимое относительное перемещение, измеряют компоненты полного вектора сил сопротивления и по их отношению судят об анизотропии.
Основным недостатком данного способа является назначение данного способа, направленного на оценку свойств анизотропных материалов, а также отсутствие возможности испытания пар анизотропных материалов, т.к. в данном способе не учитывается фактор взаимной ориентации анизотропных поверхностей.
Наиболее близким по технической сущности является способ определения анизотропии физико-механических, преимущественно фрикционных, свойств материала (А.с. №1388769, кл. МКИ2 G01N 19/02, 1988, БИ №14), заключающийся в том, что пару трения, в зоне контакта которой хотя бы одно из тел обладает анизотропией физико-механических свойств поверхностного слоя, приводят в контакт под действием нормальной силы, устанавливают исходную взаимную ориентацию осей скольжения пары трения, задают при помощи привода движения необходимое относительное перемещение и измеряют компоненты полного вектора сил сопротивления и по их отношению судят об анизотропии.
Основным недостатком способа прототипа является его ограниченное функциональное назначение, направленное только на оценку свойств материалов, при фиксированном взаимном положении осей анизотропии контактирующих поверхностей.
Известны устройства испытания анизотропных материалов, например двухкоординатная машина трения (Патент РФ №2287801, МПК7 G01N 3/56, G01N 19/02 Бюл. №32 от 20.11.2006), содержащая основание, держатель образца, держатель индентора, связанный с механизмом нагружения и двухкомпонентным датчиком силы, привод перемещения держателя индентора, систему программного управления и систему автоматизированной оценки мгновенного значения главного вектора силы трения.
Недостатком устройства является отсутствие возможности контролируемого разворота индентора в процессе движения пары трения, т.к. держатель индентора и сам индентор жестко фиксируется на каретке поступательного перемещения, а также излишняя сложность устройства из-за применения двухкоординатного привода.
Наиболее близким по технической сущности является прибор для определения анизотропии физико-механических свойств поверхностного слоя твердого тела (Авторское свидетельство СССР №665244, кл. G01N 3/44 // G01N 19/02, 1979), содержащий держатель образца, привод перемещения держателя, индентор, взаимодействующий с ним механизм нагружения, связанный с индентором двухкомпонентный датчик силы.
Недостатком устройства-прототипа является узкая область применения, ограниченная случаем испытания анизотропных материалов, направленная на установление такого направления движения индентора, по поверхности испытуемого образца, при котором действие главного вектора силы трения будет соответствовать заданному соотношению составляющих его компонент, устанавливаемое исследователем на базе априорной информации. Хотя применение системы управления двухкоординатным приводом движения связанно с системой оценки величин компонент силы сопротивления, основой управления является регулирование направления движения индентора, и в этом случае траектория движения индентора остается неопределенной, что не свойственно реальным парам трения узлов и механизмов.
Задачей изобретения является разработка способа и устройства управления фрикционными узлами с использованием эффекта анизотропного трения.
Способ управления фрикционным взаимодействием пар трения, заключающийся в том, что пару трения, в зоне контакта которой хотя бы одно из тел обладает анизотропией физико-механических свойств поверхностного слоя, с известным расположением осей скольжения, приводят в контакт под действием нормальной силы, устанавливают исходную взаимную ориентацию осей скольжения пары трения, задают при помощи привода движения необходимое относительное перемещение, измеряют в процессе движения силу сопротивления, реализуется тем, что в процессе относительного движения пары трения вычисляют величину силы сопротивления, на основе которой осуществляют управление взаимной ориентацией осей скольжения пары трения в соответствии с заданной целевой функцией в диапазоне регулирования между точками экстремумов (min и мах) силы сопротивления для данной контактной пары.
Причем данный способ может быть использован как для регулирования силы сопротивления по одной из координат, например, в направлении, обратном направлению движения пары трения для поступательного движения пары трения или силы, действующей ортогонально направлению главного движения пары трения, так и для регулирования сил сопротивления с учетом полного вектора сил трения.
Поставленная задача решается тем, что устройство управления, содержащее держатель образца, привод перемещения держателя, индентор, взаимодействующий с ним механизм нагружения, связанный с индентором двухкомпонентный датчик силы, снабжено приводом вращения индентора и автоматическим вычислителем, выход которого включен в цепь управления приводом вращения индентора, а входы подключены к двухкомпонентному датчику силы, причем привод перемещения держателя образца выполнен независимым.
Применение привода вращения индентора обеспечивает управление угловым положением осей скольжения анизотропного индентора в процессе относительного перемещения по образцу. Автоматический вычислитель обеспечивает обработку информации, получаемой от двухкомпонентного датчика силы, производит вычисление силы сопротивления в паре трения и обеспечивает выработку сигнала поступающего в систему управления привода вращения индентора, который изменяет взаимное положение осей скольжения пары трения вращением индентора в прямом или обратном направлении в соответствии с целевой функцией управления. Автоматический вычислитель может быть реализован различными способами, например, с применением микропроцессорной вычислительной техники.
Поскольку для реализации функции управления достаточно управлять только одним приводом вращения индентора, то нет необходимости прямой связи с приводом перемещения держателя образца. Это обеспечивает возможность применения устройства в тормозных и фрикционных устройствах, причем может быть реализован как поступательный, так и вращательный тип относительного движения пары трения.
На чертеже представлено устройство управления фрикционным взаимодействием пар трения.
Устройство содержит основание 1, установленный на нем с возможностью возвратно-поступательного движения держатель 2 образца 3, связанный с приводом перемещения 4, индентор 5, взаимодействующий с устройством нагружения 6 и двухкомпонентным датчиком 7, выполненным в виде двух преобразователей 8 с усилителями 9, подключенными к входам автоматического вычислителя 10, выход которого в свою очередь включен в цепь управления привода вращения 11, установленного на основании 1 и связанного шлицевым соединением с индентором 5, причем последний выполнен цилиндрическим, его торцевая поверхность имеет выраженную анизотропию физико-механических свойств, а установлен он в нагружающем устройстве с возможностью вращения вокруг своей оси.
Способ осуществляют следующим образом.
На основании 1 устанавливают образец 3 в держателе 2, Приводят индентор 5 в контакт с образцом 3, прикладывают нагрузку при помощи устройства нагружения 6. Устанавливают некоторую произвольную ориентацию осей скольжения индентора 5.
Затем при помощи привода перемещения 4 осуществляют движение образца 3 относительно индентора 5.
В процессе движения автоматический вычислитель 10 принимает сигналы, поступающие с двухкомпонентного датчика сил 7, и производит расчет параметров сил сопротивления, на основании которого в соответствии с заданной целевой функцией формирует сигнал управления для привода вращения 11, обеспечивая тем самым изменение углового положения осей скольжения индентора 5.
В момент начала движения устанавливается некоторое промежуточное значение величины силы сопротивления, находящееся между значениями мин и мах, соответствующее первоначальному фактическому положению осей скольжения пары трения, а при достижении требуемого значения силы сопротивления с заданной точностью угловое вращение индентора прекращают, причем процесс вычисления параметров сил сопротивления производится непрерывно на протяжении всего времени относительного движения пары трения.
В конкретном устройстве управления использовали следующие компоненты: двухкомпонентный датчик силы - тензометрические преобразователи FSG 15N1 фирмы Honeywell и четырехканальный усилитель аналогового сигнала RL-4DA200 фирмы RealLab; автоматический вычислитель - персональный компьютер класса Pentium с системой сбора и управления RL-16AC фирмы RealLab; приводы движения - шаговые двигатели AEG S026/48 с модулями управления Ml 06 немецкой фирмы Kemo electronic.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АНИЗОТРОПИИ ФИЗИКО-МЕХАНИЧЕСКИХ ПРЕИМУЩЕСТВЕННО ФРИКЦИОННЫХ СВОЙСТВ МАТЕРИАЛА | 2008 |
|
RU2374626C1 |
| ДВУХКООРДИНАТНАЯ МАШИНА ТРЕНИЯ | 2005 |
|
RU2287801C1 |
| НАГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ТОРЦЕВОГО ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЛОПАТОК ВЕНТИЛЯТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ НА ВИБРОСТЕНДЕ | 2012 |
|
RU2494365C1 |
| УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ АНИЗОТРОПИИ ТРЕНИЯ | 2008 |
|
RU2373519C1 |
| Устройство для испытания материалов на трение и износ | 2018 |
|
RU2693796C1 |
| Способ определения анизотропии поверхностных физико-механических,преимущественно фрикционных,свойств материала | 1986 |
|
SU1388769A2 |
| Устройство для испытания материалов подшипников на трение и износ | 2021 |
|
RU2766270C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФРИКЦИОННОЙ УСТАЛОСТИ ПОВЕРХНОСТЕЙ ПРИ ЛИНЕЙНОМ КОНТАКТИРОВАНИИ | 1997 |
|
RU2130601C1 |
| ОБРАЗЕЦ ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРЕНИЯ | 2010 |
|
RU2433387C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТРЕНИЯ | 2007 |
|
RU2345350C1 |
Изобретение относится к области механики твердого тела, а именно к способам управления фрикционными и тормозными устройствами. Технический результат заключается в возможности управления параметрами контакта фрикционных узлов и механизмов с использованием эффекта анизотропного трения. Устройство управления фрикционным взаимодействием пар трения содержит держатель образца, привод перемещения держателя, индентор, взаимодействующий с ним механизм нагружения, связанный с индентором двухкомпонентный датчик силы. При этом устройство снабжено приводом вращения индентора и автоматическим вычислителем, выход которого включен в цепь управления приводом вращения индентора, а входы подключены к двухкомпонентному датчику силы, причем индентор выполнен таким образом, что в зоне контакта имеет выраженную анизотропию поверхностных физико-механических свойств с известным расположением осей скольжения, а привод перемещения держателя образца выполнен независимым. Способ реализуется вышеуказанным устройством. 2 н. и 1 з.п. ф-лы, 1 ил.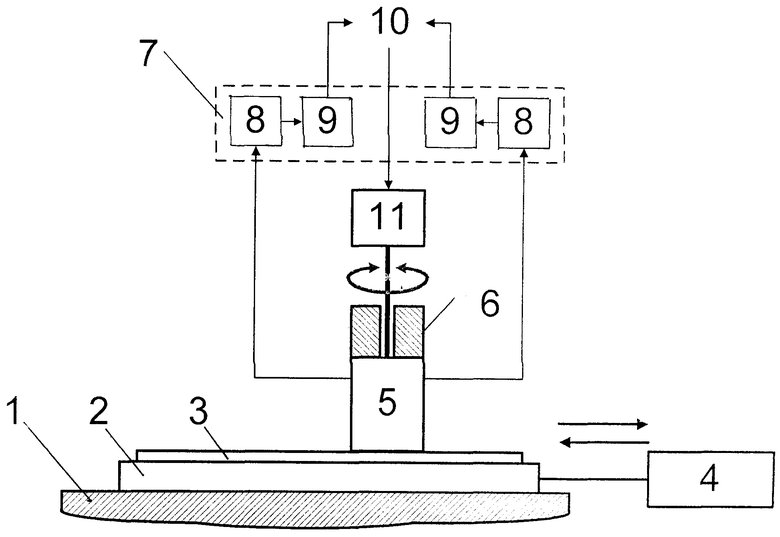
1. Способ управления фрикционным взаимодействием пар трения, заключающийся в том, что пару трения, в зоне контакта которой хотя бы одно из тел обладает анизотропией физико-механических свойств поверхностного слоя, с известным расположением осей скольжения, приводят в контакт под действием нормальной силы, устанавливают исходную взаимную ориентацию осей скольжения пары трения, задают при помощи привода движения необходимое относительное перемещение, измеряют в процессе движения силу сопротивления, отличающийся тем, что в процессе относительного движения пары трения вычисляют величину силы сопротивления, на основе которой осуществляют управление взаимной ориентацией осей скольжения пары трения в соответствии с заданной целевой функцией в диапазоне регулирования между точками экстремумов (min и мах) силы сопротивления для данной контактной пары.
2. Способ управления фрикционным взаимодействием пар трения по п.1, отличающийся тем, что в процессе движения непрерывно и одновременно измеряют компоненты полного вектора сил сопротивления, на основе которых вычисляют его величину и пространственное положение.
3. Устройство управления фрикционным взаимодействием пар трения, содержащее держатель образца, привод перемещения держателя, индентор, взаимодействующий с ним механизм нагружения, связанный с индентором двухкомпонентный датчик силы, отличающееся тем, что оно снабжено приводом вращения индентора и автоматическим вычислителем, выход которого включен в цепь управления приводом вращения индентора, а входы подключены к двухкомпонентному датчику силы, причем индентор выполнен таким образом, что в зоне контакта имеет выраженную анизотропию поверхностных физико-механических свойств с известным расположением осей скольжения, а привод перемещения держателя образца выполнен независимым.
| Способ определения анизотропии поверхностных физико-механических, преимущественно фрикционных, свойств материала | 1974 |
|
SU705312A1 |
| Способ определения анизотропии поверхностных физико-механических,преимущественно фрикционных,свойств материала | 1986 |
|
SU1388769A2 |
| ДВУХКООРДИНАТНАЯ МАШИНА ТРЕНИЯ | 2005 |
|
RU2287801C1 |
| Прибор для определения анизотропии физико-механических свойств поверхностного слоя твердого тела | 1974 |
|
SU665244A1 |

