Изобретение относится к технике преобразования электрической энергии и может быть использовано в устройствах и системах бесперебойного питания переменного тока, а также в устройствах автоматики и измерительной техники.
Известны преобразователи напряжения с последовательно включенными импульсным и линейным каналами [1]. Для преобразования напряжения с помощью импульсного канала и формирования синусоидальной формы используется широтно-импульсная модуляция. На выходе импульсного канала напряжение частично фильтруют. Выходное напряжение импульсного канала суммируют с положительным и отрицательным напряжениями небольшой величины и полученные напряжения используют для питания линейного канала. С помощью линейного канала осуществляют дополнительную фильтрацию напряжения. Поскольку ток линейного канала равен току нагрузки, его мощность и потери оказываются сравнительно большими.
Наиболее близким по технической сущности к предлагаемому способу является способ управления преобразователем электрической энергии с параллельно включенными линейным и импульсным каналами [2], выходные токи которых суммируют. С помощью линейного канала, охваченного отрицательной обратной связью по напряжению, формируют выходное напряжение заданной величины и формы (в данном случае синусоидальной). При этом выходной ток линейного канала измеряют и используют для управления импульсным каналом. С помощью импульсного канала посредством широтно-импульсной модуляции производят коммутацию энергии в нагрузку в соответствии с сигналом выходного тока линейного канала и одновременно его ограничение. Выходное напряжение импульсного канала фильтруется с помощью дросселя и по форме повторяет напряжение линейного канала, а ток суммируется на нагрузке с током линейного канала. Линейный канал используют для обеспечения высоких динамических свойств и фильтрации выходного напряжения импульсного сигнала.
Коэффициент полезного действия линейного канала невысок, его мощность сравнительно мала и при отказе мощного импульсного канала происходит отказ всего устройства.
Решение задачи снижения потерь в устройстве преобразования электрической энергии и повышения его надежности состоит в том, что несколько инверторов соединяют параллельно, а управление инверторами осуществляют путем контроля сигналов выходных токов инверторов. Такое управление позволяет задавать количество инверторов и изменять его в соответствии с конкретными потребностями и с избытком.
Техническим результатом заявляемого решения является повышение коэффициента полезного действия, надежности системы бесперебойного питания с выходом на переменном токе и ее масштабируемости, то есть, например, увеличение выходной мощности системы путем параллельного подключения дополнительного источника бесперебойного питания.
Сущность предлагаемого способа управления состоит в том, что в качестве первого преобразователя используют инвертор напряжения с широтно-импульсной модуляцией, выходное напряжение которого фильтруют с помощью фильтра, например Г-образного. Несущую частоту широтно-импульсного преобразования электрической энергии второго инвертора, выбирают меньше, чем у первого, измеряют выходной ток второго инвертора и часть сигнала отрицательной обратной связи, пропорционального этому току, вычитают из сигнала управления, задавая таким образом коэффициент передачи тока второго инвертора.
Параллельно первому и второму инвертору дополнительно подключают третий, четвертый и так далее инверторы, выходные напряжения которых фильтруют с помощью соответствующих дросселей. Для управления третьим, четвертым и так далее инверторами также используют сигнал выходного тока первого инвертора, несущие частоты третьего, четвертого и так далее инверторов выбирают меньшими, чем у первого, а коэффициенты передачи инверторов по току задают посредством соответствующей глубины отрицательной обратной связи по току.
Несущие частоты широтно-импульсной модуляции для второго, третьего, четвертого и так далее инверторов задают одинаковыми, а фазы импульсов, формируемых с помощью широтно-импульсных модуляторов первого, второго и так далее инверторов задают со смещением, достаточным для исключения одновременного срабатывания их ключей.
На фиг.1 изображена функциональная блок-схема устройства для осуществления предлагаемого способа; на фиг.2 и 3 - диаграммы напряжений и токов, поясняющие заявляемый способ управления параллельно соединенными инверторами.
Устройство для осуществления предлагаемого способа управления параллельно соединенными инверторами (фиг.1) содержит первый инвертор 1, называемый ведущим, который состоит из двух ключевых элементов на основе транзисторов 2, 3 и диодов рекуперации энергии 4 и 5, Г-образного фильтра, включающего дроссель 6 и конденсатор 7, а также датчик тока 8 и делитель выходного напряжения на резисторах 9 и 10. Управление инвертором производится с помощью цифрового контроллера 11, реализующего функции вычитания (сумматор 12), управления ключами с помощью драйвера 13, широтно-импульсной модуляции и другие. Цепи отрицательной обратной связи инвертора содержат устройства 14 и 15 гальванической развязки входных и выходных цепей инвертора.
Структурная схема второго инвертора 16, называемого ведомым, третьего (17) и других ведомых инверторов (18) аналогична схеме ведущего инвертора 1. Отличие заключается в отсутствии конденсаторов фильтра и в том, что на входы сумматора (19, 20) каждого инвертора подаются сигнал выходного тока ведущего инвертора и сигнал выходного тока соответствующего инвертора с датчика тока (21 и 22).
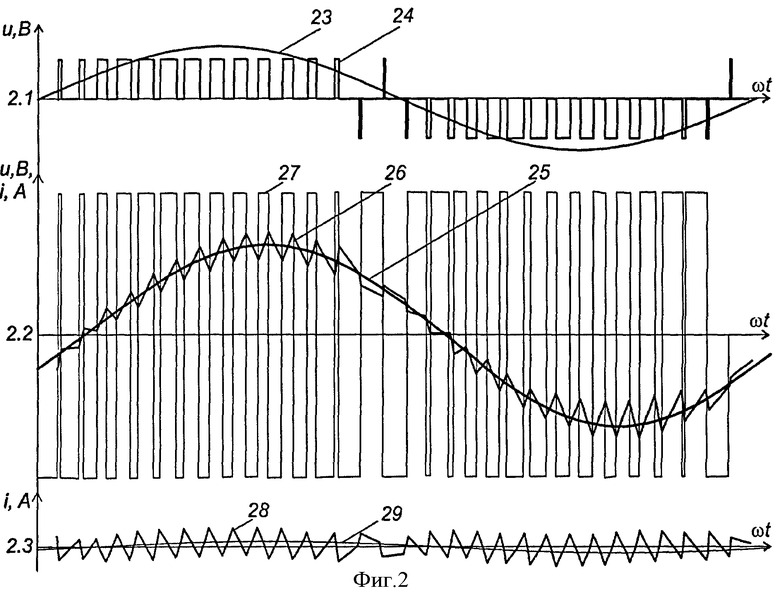
На фиг.2 на диаграмме 2.1 приведены кривая 23 задающего сигнала напряжения, а также ломаная 24 сигнала управления ключевыми элементами второго инвертора. На диаграмме 2.2 условно показана кривая 25 суммарного выходного тока инверторов, кривая 26 тока дросселя второго инвертора и ломаная 27 напряжения на выходе ключевых элементов второго инверторов. На диаграмме 2.3 изображена ломаная 28 выходного тока первого ведущего инвертора и ее низкочастотная составляющая 29.
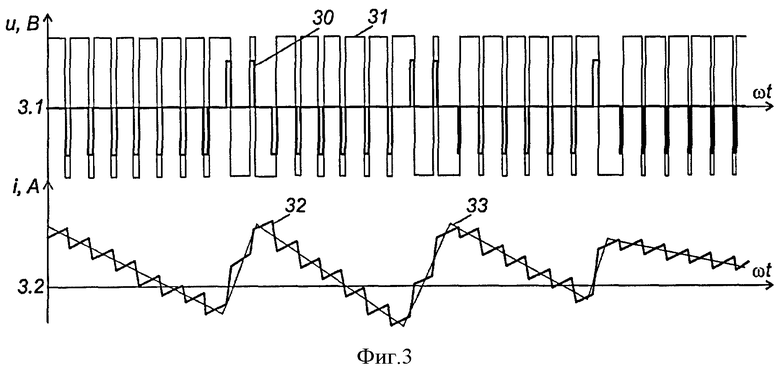
На фиг.3 показаны диаграммы с большим, чем на диаграммах фиг.2 масштабом изображений по временной оси. На диаграмме 3.1 приведена ломаная 30 сигнала управления первого ведущего инвертора и ломаная 31 напряжения на выходе его ключей, а на диаграмме 3.2 изображена ломаная 32 тока дросселя первого инвертора и условно показана ломаная 33 усредненного тока первого инвертора (соответствующая фрагменту ломаной 28 на фиг.2).
Способ управления параллельно соединенными инверторами осуществляется следующим образом.
Задающий сигнал, подобный кривой 23 на фиг.2, в цифровой или аналоговой форме подают на вход инвертора 1 (фиг.1). Если выбрать коэффициент передачи первого инвертора по напряжению равным 1, то выходное напряжение инвертора по величине будет равным задающему сигналу. Этот сигнал определяет выходное напряжение каждого из инверторов 1, 16, 17 и 18, которые являются составляющими частями модулей или источников бесперебойного питания переменного тока, образующих систему бесперебойного питания. Задающий сигнал синусоидальной формы поступает на вход сумматора 12 цифрового контроллера 11 первого инвертора. На другой вход сумматора подают сигнал отрицательной обратной связи с делителя выходного напряжения на резисторах 9, 10 и устройства гальванической развязки 14. Сигнал отрицательной обратной связи может быть предварительно обработан, например отфильтрован с целью коррекции амплитудно-частотной характеристики.
Разностный сигнал преобразуется в импульсный сигнал, подобный ломаной 24 (фиг.2) с изменяемой шириной импульсов (и пауз) посредством широтно-импульсного модулятора в составе цифрового контроллера 11 (фиг.1). С помощью драйвера 13 импульсный сигнал усиливается и подается на ключевые элементы. Импульсы напряжения положительной полярности коммутируются в нагрузку с помощью транзистора 2, при этом рекуперация энергии накопленной в дросселе (или нагрузке активно-индуктивного характера) осуществляется через возвратный диод 5. Аналогично импульсы отрицательной полярности коммутируются в нагрузку с помощью транзистора 3, а рекуперация энергии производится через возвратный диод 4.
Несущая фиксированная частота модуляции, соответствующая ломаной 24 на фиг.2 равна 1500 Гц и выбрана, в данном случае, для наглядности описания предлагаемого способа управления. В реальном устройстве первого инвертора несущая частота задается значительно большей (например 100 кГц и выше), а амплитуда пульсаций выбирается столь малой, что кривая выходного напряжения условно соответствует сплошной гладкой линии, подобной кривой 23.
Поскольку на фиг.2 показаны процессы для активно-индуктивной нагрузки с номинальными (большими) токами инверторов, то ломаная 27 выходного напряжения в общей точке ключей 2 и 3 (фиг.1) отображает переключение от положительного напряжения питания, например +450 В, к отрицательному -450 В и наоборот. При малых токах возможен режим (прерывистых токов), когда при запирании ключей их выходное напряжение (ломаная 27 на фиг.2) в течение части интервала паузы равно нулю.
Выходной ток первого инвертора измеряется с помощью датчика 8 (фиг.1), подается на вход второго (инвертор 16), третьего (инвертор 17) и так далее инверторов и ограничивается с их помощью (см. ломаную 28 на фиг.2) путем соответствующей коммутации энергии. Входной сигнал управления ведомых инверторов, равный разности сигнала выходного тока первого инвертора и сигналов отрицательной обратной связи по току, подается с выхода сумматора (19, 20) на вход соответствующего широтно-импульсного модулятора. При увеличении выходного тока первого инвертора до значения, когда разностный сигнал на сумматорах больше нуля с помощью каждого из ведомых инверторов в нагрузку коммутируется импульс положительной полярности. При уменьшении указанного разностного сигнала до отрицательной величины в нагрузку коммутируется отрицательный импульс. Таким образом, выходной ток первого высокочастотного инвертора (ломаная 28 и ее усредненное значение 29) значительно меньше, чем выходной ток любого из ведомых низкочастотных инверторов, и может составлять менее (5-10)% от значения суммарного выходного тока.
С помощью ломаной 26 показан выходной ток, например, второго инвертора или суммарный ток нескольких инверторов (при условии равенства и синхронности их частот модуляции), а с помощью ломаной 27 напряжение, коммутируемое их ключами. С помощью кривой 25 отображается общий выходной ток, равный сумме тока первого инвертора (ломаная 28) и токов (ломаная 26) остальных инверторов. Величина выходного тока (действующее значение) каждого из ведомых низкочастотных инверторов задается с помощью коэффициента передачи по току и устанавливается автоматически следующим образом:
In≈I1·kn, A,
где I1 - выходной ток первого инвертора, А; In - выходной ток n-го инвертора, А; kn - коэффициент передачи по току n-го инвертора; n=2, 3,…, N; N - число параллельно соединенных инверторов.
Значение выходного тока первого инвертора устанавливается автоматически и при номинальном значении выходного тока равно:

где IВых - общий выходной ток параллельно соединенных инверторов, A; UВых=220 В - выходное напряжение инверторов; zН - сопротивление нагрузки.
Первый, ведущий инвертор выполняет в устройстве функции активного фильтра. Для обеспечения высоких динамических и фильтрующих свойств всего устройства несущая частота модуляции первого инвертора должна быть значительно выше несущей частоты ведомых инверторов. На фиг.3 показана ломаная 30 выходного напряжения широтно-импульсного модулятора первого инвертора и ломаная 31 выходного напряжения его ключей с несущей, превышающей несущую частоту модуляции второго инвертора в 10 раз. С помощью ломаной 32 изображен выходной ток первого инвертора, а посредством ломаной 33 - усредненное значение этого тока, соответствующее фрагменту ломаной 28, показанной на фиг.2.
На диаграммах фиг.2 и 3 приведены кривые процессов для широтно-импульсной модуляция с фиксированной несущей частотой и двухполярными импульсами с возвратом к нулю. В источниках бесперебойного питания двухполярное напряжение, например, величиной +450 В и -450 В может быть получено на выходах корректора коэффициента мощности, либо с помощью преобразователя (конвертора) напряжения аккумуляторной батареи. Предлагаемый способ управления параллельно соединенными инверторами позволяет в общем случае использовать и другие виды широтно-импульсной модуляции, например широтно-импульсную модуляцию с выходным напряжением без возврата к нулю, которой свойственна простота, но и большие потери при малых токах нагрузки.
Графическое изображение процессов на фиг.2 и 3 соответствуют одинаковой частоте и фазе переключения ведомых инверторов. Одновременная коммутация мощных высокоскоростных ключей приводит к появлению значительных импульсных помех широкого частотного спектра. Если произвести сдвиг фазы импульсов переключения различных инверторов, равный по величине длительности запирания ключа, то общая картина процессов практически не изменится, а уровень помех значительно уменьшится.
При малом токе нагрузки и большом числе параллельно включенных инверторов посредством мощных инверторов (второго, третьего и так далее) коммутируется лишь мощность импульсных помех, которая фильтруется с помощью первого инвертора. Таким образом, с помощью первого маломощного и высокочастотного инвертора обеспечивается собственно ток нагрузки и одновременно фильтрация импульсных помех. Поэтому с целью уменьшения потерь энергии при малых нагрузках для каждого из второго, третьего и так далее инверторов задают порог чувствительности широтно-импульсного модулятора. При сигналах управления меньших, чем порог чувствительности модулятора, ключевые элементы инвертора оставляют в запертом состоянии.
С помощью общего контроллера преобразователя, состоящего из параллельно включенных инверторов, осуществляется измерение и оценка величины общего выходного тока, выходных токов инверторов и их количество. Если значение тока нагрузки меньше, чем суммарный порог чувствительности широтно-импульсных модуляторов второго, третьего и так далее инверторов, выходные импульсы одного из инверторов, кроме первого, блокируют. Затем производятся следующие измерения и оценка и, в случае необходимости, блокируются выходные импульсы двух инверторов и так до тех пор, пока суммарный порог чувствительности оставшихся активных инверторов не окажется меньшим, чем ток нагрузки, либо пока не останется активным один первый инвертор. При увеличении тока нагрузки активизация мощных инверторов производится в обратной последовательности. В общем случае коэффициенты передачи по току отдельных модулей и установочная мощность могут быть различными.
Предлагаемый способ управления позволяет повысить надежность источника бесперебойного питания на основе нескольких источников (инверторов), соединенных силовыми входами и выходами параллельно. В случае отказа одного из ведомых источников (второго, третьего и так далее) последний отключается по команде общего контроллера или собственного, или в результате срабатывания предохранителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНО СОЕДИНЕННЫМИ МОДУЛЯМИ ИСТОЧНИКА БЕСПЕРЕБОЙНОГО ПИТАНИЯ | 2012 |
|
RU2502181C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЗЕРВИРОВАННЫМИ МОДУЛЯМИ ИСТОЧНИКА БЕСПЕРЕБОЙНОГО ПИТАНИЯ | 2015 |
|
RU2658621C2 |
| СПОСОБ УПРАВЛЕНИЯ КОНДИЦИОНЕРОМ ЭЛЕКТРОСЕТИ | 2009 |
|
RU2408122C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛИНЕЙНО-ИМПУЛЬСНОГО УСИЛИТЕЛЯ МОЩНОСТИ С ПАРАЛЛЕЛЬНЫМ ВКЛЮЧЕНИЕМ КАНАЛОВ | 2006 |
|
RU2320079C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛИНЕЙНО-ИМПУЛЬСНЫМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2003 |
|
RU2237963C1 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВЫМ КАНАЛОМ УСИЛИТЕЛЯ МОЩНОСТИ КЛАССА D | 2006 |
|
RU2320077C1 |
| ИМПУЛЬСНО-МОДУЛИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012989C1 |
| Преобразователь постоянного напряжения в переменное напряжение заданной формы | 1983 |
|
SU1136283A1 |
| Способ синхронизации трехфазных инверторов напряжения | 2024 |
|
RU2835153C1 |
| ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ АППАРАТУРЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2013 |
|
RU2534028C1 |
Изобретение относится к преобразовательной технике и может быть использовано в устройствах и системах бесперебойного питания переменного тока, а также в устройствах автоматики и измерительной техники. Техническим результатом заявляемого решения является повышение коэффициента полезного действия, надежности параллельно соединенных инверторов в системах бесперебойного питания с выходом на переменном токе. Способ управления параллельно соединенными инверторами состоит в том, что выходные токи параллельно включенных первого канала и второго импульсного канала преобразования электрической энергии суммируют на общей нагрузке, на вход первого канала подают сигнал управления, измеряют выходной ток первого канала и используют его для управления вторым импульсным каналом, с помощью которого коммутируют в нагрузку импульсы положительной или отрицательной полярности, которые фильтруют с помощью дросселя. Новым в предлагаемом способе управления является использование в качестве первого преобразователя инвертора напряжения с широтно-импульной модуляцией, выходное напряжение которого фильтруют с помощью фильтра, например Г-образного. Несущую частоту широтно-импульсного преобразования электрической энергии второго инвертора, выбирают меньше, чем у первого, измеряют выходной ток второго инвертора и часть сигнала отрицательной обратной связи, пропорционального этому току вычитают из сигнала управления, задавая таким образом коэффициент передачи тока второго инвертора. Параллельно первому и второму инвертору дополнительно подключают третий, четвертый и так далее инверторы, выходные напряжения которых фильтруют с помощью соответствующих дросселей. Для управления третьим, четвертым и так далее инверторами также используют сигнал выходного тока первого инвертора, несущие частоты третьего, четвертого и так далее инверторов выбирают меньшими, чем у первого, а коэффициенты передачи инверторов по току задают посредством соответствующей глубины отрицательной обратной связи по току. Несущие частоты широтно-импульсной модуляции для второго, третьего, четвертого и так далее инверторов, называемых ведомыми, генерируют одинаковыми, а фазы импульсов задают со смещением, достаточным для исключения одновременного срабатывания их ключей. При токах нагрузки меньших, чем порог чувствительности ведомых инверторов, их импульсы блокируют, а при увеличении тока нагрузки инверторы вновь активизируют. 2 з.п. ф-лы, 3 ил.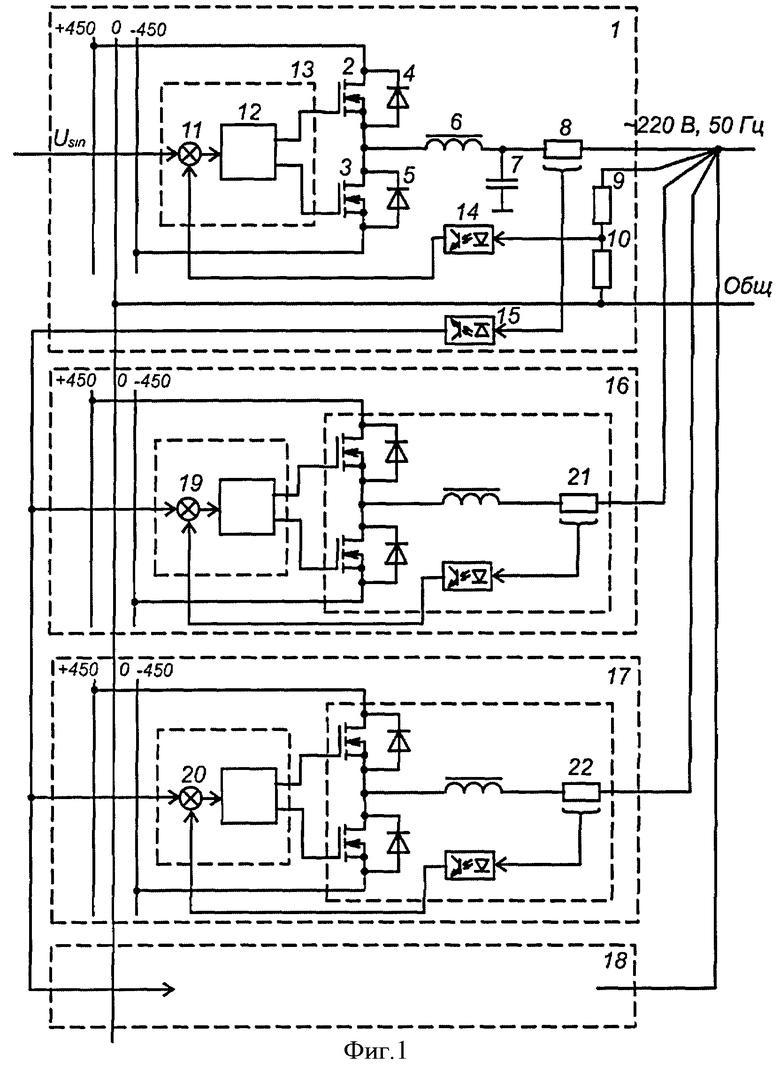
1. Способ управлений параллельно соединенными инверторами, который заключается в том, что силовые входы и выходы первого преобразователя напряжения постоянного тока в напряжение переменного тока синусоидальной формы подключают параллельно соответственно силовым входам и выходам второго преобразователя напряжения на основе инвертора и суммируют их выходные токи, на управляющий вход первого преобразователя подают сигнал управления синусоидальной формы и заданной величины, из которого вычитают сигнал отрицательной обратной связи по напряжению, полученный разностный сигнал используют для управления первым преобразователем, выходной ток которого измеряют и преобразуют с помощью широтно-импульсного модулятора в последовательность импульсов соответствующей ширины положительной или отрицательной полярности и используют его для управления вторым преобразователем, выходное напряжение которого фильтруют с помощью дросселя, отличающийся тем, что в качестве первого преобразователя используют инвертор с широтно-импульсной модуляцией, выходное напряжение которого фильтруют с помощью фильтра, а несущую частоту широтно-импульсного преобразования электрической энергии второго инвертора выбирают меньше, чем у первого, измеряют его выходной ток и часть сигнала отрицательной обратной связи, пропорционального этому току, вычитают из сигнала управления, задавая таким образом коэффициент передачи тока второго инвертора, параллельно первому и второму инвертору дополнительно подключают третий, четвертый и так далее инверторы, выходные напряжения которых фильтруют с помощью соответствующих дросселей, для управления третьим, четвертым и так далее инверторами также используют сигнал выходного тока первого инвертора, несущие частоты третьего, четвертого и так далее инверторов выбирают меньшими, чем у первого, а коэффициенты передачи инверторов по току задают посредством соответствующей глубины отрицательной обратной связи.
2. Способ по п.1, отличающийся тем, что частоты широтно-импульсной модуляции задают одинаковыми для второго, третьего, четвертого и так далее инверторов, а фазы импульсов, формируемых с помощью широтно-импульсных модуляторов первого, второго и так далее инверторов, задают со смещением, достаточным для исключения одновременного срабатывания их ключей.
3. Способ по п.1, отличающийся тем, что для каждого из второго, третьего и так далее инверторов задают порог чувствительности и при уменьшении тока нагрузки до значений меньших, чем суммарный порог чувствительности второго, третьего и так далее инверторов выходные импульсы одного из инверторов, кроме первого, блокируют, затем блокируют выходные импульсы двух инверторов и так до тех пор, пока суммарный порог чувствительности оставшихся активных инверторов не окажется большим, чем ток нагрузки, либо пока не останется активным один первый инвертор, при увеличении тока нагрузки до значений больших, чем суммарный порог чувствительности активных инверторов, неактивные инверторы активизируют в обратной последовательности.
| Система @ параллельно включенных преобразователей | 1985 |
|
SU1356160A1 |
| УСТРОЙСТВО СЛИВА ДЛЯ РАКОВИНЫ | 2007 |
|
RU2394129C2 |
| КОМБИНИРОВАННЫЙ ЭЛЕКТРОФИЛЬТР | 2009 |
|
RU2419478C1 |

