Область техники, к которой относится изобретение
Настоящее изобретение относится к устройствам формирования изображения и способам формирования изображения, где используется множество записывающих головок, и, в частности, касается устройства формирования изображения и способа формирования изображения, предназначенных для коррекции несоответствующего участка в изображении, сформированном множеством записывающих головок.
Уровень техники
(Описание терминологии)
Сначала описывается терминология, использованная в настоящем изобретении.
Записывающая головка>
Записывающая головка записывает изображение на тело для записи с помощью записывающего луча. Например, когда источником энергии является свет, лазерный луч, излучаемый источником лазерного излучения, фокусируется на теле для записи с помощью линзы. Изображение формируют путем включения/выключения лазерного луча, что формирует участки на теле для записи, которые взаимодействуют со светом, и участки, которые не воспринимают свет.
Пример записывающей головки показан на фиг. 1. Записывающая головка, показанная на фиг. 1, включает в себя полупроводниковый лазерный диод LD 1, асферическую линзу 2, диафрагму 3 и адгезив 4.
<Записывающий луч>
В качестве записывающего луча записывающая головка, показанная на фиг. 1, использует лазерный луч. В общем случае записывающая головка записывает изображение путем передачи света, тепла, воздействий вещества или самого вещества, например, чернил, на тело для записи.
<Тело для записи>
Тело для записи реагирует на энергию, поступающую от записывающей головки, и проявляет различные физические признаки на участках, где имеет место облучение энергией, и участках, где облучение энергией отсутствует, в результате чего происходит запись изображения. Например, изображение записывается посредством химической реакции, изменений фаз или изменений формы. В частности, тело для записи, использующее световую энергию, выполняют из фоточувствительного материала для реагирования на световую энергию, теплочувствительного материала для реагирования на тепло лазерного луча или из реактивного материала, который выжигается под воздействием тепла лазерного луча.
<Исходные данные изображения>
Исходные данные изображения представляют изображение, подлежащее формированию устройством формирования изображения. Например, изображение может быть выражено на языке описания страниц, который задает фигуры с символами, сформированными параметрами уравнений для точек и поверхностей и параметрами, задающими символьные цепные коды и типы шрифтов. Другими примерами являются данные битовой карты с произвольной разрешающей способностью или данные языка описания страниц, включающие в себя данные битовой карты.
<Растеризация>
Растеризация означает преобразование исходных данных изображения в набор точек (набор бит), которое может быть записано устройством формирования изображения на тело для записи. В результате этого преобразования на тело для записи записывается 1 бит растеризованных данных в виде 1 точки. Для вывода полутонов шкалы уровней серого преобразуют в точки полутонов, соответствующие предварительно определенному количеству точек на единицу площади.
<Информация о позиционном смещении>
Как показано на фиг. 2, когда записывающие головки расположены в идеальных позициях, области записи каждой из записывающих головок на теле для записи компонуются непрерывно со смежными областями. Однако, в действительности, из-за отклонений в производственном процессе позиции записи записывающих головок компонуются на теле записи не соответствующим образом, как показано на фиг. 3 сплошными линиями. В результате имеет место некоторая величина позиционного смещения (x, y) между идеальной областью записи и действительной областью записи, как показано на фиг. 4. В этом примере идеальная область записи представляет собой прямоугольник, а величина позиционного смещения может быть представлена в виде расстояния, на которое сдвинулись координаты вершины. В этом примере получаются позиционные смещения относительно идеальных позиций вершин. Однако, в действительности, пока соседние области записи скомпонованы непрерывно и не смещены друг относительно друга, записанное изображение отличается высокой точностью. Соответственно, величина позиционного смещения может быть представлена относительным расстоянием между пикселями соседних областей записи, причем эти пиксели идеально соседствуют друг с другом. Независимо от того, каким образом выражена величина смещения, информация о позиционном смещении представляет не соответствующую область, то есть появляется зазор в записанном изображении на границе между соседними областями, соответствующими соседним записывающим головкам.
Информация о позиционном смещении отличается у разных устройств формирования изображения. Соответственно, на тело для записи наносят опорное изображение (маркер), а информацию о позиционном смещении получают на основе нанесенного опорного изображения.
На фиг. 5 на теле записи записаны метки оригинала (M1, M2). Каждая метка записана в одной из областей записи двух записывающих головок. Метки, записанные двумя записывающими головками, сравнивают с исходными метками (метками на оригинале), с тем чтобы обнаружить позиционное смещение между ними.
На фиг. 5 позиционное смещение обнаруживается из позиционного соотношения v0 между метками на оригинале и позиционного соотношения v1 между метками, записанными на теле для записи. Таким образом, можно обнаружить относительное позиционное смещение между двумя записывающими головками.
<Информация о сканировании>
Информация о сканировании соответствует данным, отражающим позицию, на которой должны быть записаны данные изображения при формировании изображения. Когда имеется N линий сканирования, позиции сканирования слева направо выражаются как L[1], L[2]… L[N]. Обычно информация о позиции выражается для L[1], L[2]… L[N] в виде 1, 2, 3, …, Т.
Для увеличения плотности сканирования между линией L[1] сканирования и линией L[2] сканирования можно добавить, например, три разнесенных линии сканирования. При наличии добавленных линий сканирования позиционная информация для L[1], L[2], L[3],… будет представлять собой следующее: 1, 1,25, 1,5, 1,75, 2, 3, …, N.
Информация о сканировании также включает в себя информацию о высоте Lh для определения позиции, с которой начинается сканирование (начальная позиция сканирования), что описано ниже.
<Пошаговое сканирование>
Как показано на фиг. 6, в способе пошагового сканирования подвижная площадка 15 останавливается, когда тело 11 для записи, обхватывающее вращающийся барабан 12, оказывается напротив записывающих головок 16.
<Спиральное сканирование>
Как показано на фиг. 7, в способе спирального сканирования подвижная площадка постоянно движется при вращении барабана. Обычно подвижная площадка перемещается с такой скоростью, чтобы во время одного оборота барабана сканировалась одна основная линия сканирования. Соответственно, поверхность барабана может сканироваться по спирали.
(Стандартное устройство формирования изображения)
Далее со ссылками на фиг. 6 описывается пример стандартного устройства формирования изображения.
Устройство формирования изображения, использующее способ пошагового сканирования, показанное на фиг. 6, включат в себя тело 11 для записи, барабан 12, кодер 14 барабана, подвижную площадку 12, которая перемещается параллельно барабану 12, записывающие головки 16, предусмотренные на подвижной площадке 15, и ось 17 вращения. Записывающие лучи, излучаемые записывающими головками 16, сканируют тело 11 для записи, формируя изображение.
Телом 11 для записи является записывающий материал, используемый для формирования изображения, который обматывает поверхность или нижнюю сторону окружности барабана 12. Тело 11 записи прикреплено к округлой поверхности барабана 12 с помощью фиксирующего механизма, такого как зажимное устройство. Барабан 12 может вращаться вокруг оси 17 вращения, причем он вращается с помощью привода (не показан), сопряженного с осью 17 вращения. Для точного управления вращением барабана 12 в качестве приводного средства используется шаговый двигатель или серводвигатель.
На одном из концов барабана предусмотрен кодер 14 барабана. Кодер 14 барабана включает в себя источник света и устройство обнаружения света, которое обнаруживает свет, излучаемый источником света, с тем чтобы определить угловое положение вращающегося барабана 12. Кроме того, кодер 14 барабана может определить исходное положение барабана 12, то есть положение, с которого барабан 12 начинает свое вращение.
Подвижная площадка 15 может перемещаться в аксиальном направлении барабана 12 под управлением шариковой винтовой пары или линейного двигателя. Траектория 13 сканирования перемещается в соответствии с перемещением подвижной площадки 15.
Устройство формирования изображения, показанное на фиг. 6, работает следующим образом.
Барабан 12 приводится во вращение источником энергии, например, двигателем. Как было описано выше, кодер 14 барабана определяет угловое положение барабана 12. В частности, из выходного сигнала кодера 14 барабана можно получить данные о позициях тела 11 для записи и записывающих головок 16. На основе полученных позиций определяются временные соотношения для выполнения записи на теле 11 для записи.
Устройство формирования изображения определяет с помощью кодера 14 барабана исходную позицию барабана 12, и записывающие головки 16 начинают запись изображения. С каждым оборотом барабана 12 каждая записывающая головка 16 сканирует одну линию. Это называется основным сканированием.
После завершения одной операции основного сканирования по телу 11 для записи подвижная площадка 15 перемещается по горизонтали на позицию следующей операции основного сканирования; это называется субсканированием. Затем выполняется основное сканирование. Записывающие лучи от записывающих головок 16 сканируют тело 11 для записи путем попеременного повторения субсканирования и основного сканирования. После завершения сканирования заранее определенной области на теле 11 для записи процесс создания изображения заканчивается.
В приведенном выше примере субсканирование выполняется с каждым оборотом барабана 12, то есть на пошаговой основе. Вместо выполнения субсканирования пошаговым образом его также можно выполнять фактически непрерывно, так чтобы тело 11 для записи сканировалось по спирали. Устройство формирования изображения, описанное со ссылками на фиг. 7, выполняет субсканирование по спирали. В устройстве формирования изображения, описанном со ссылками на фиг. 7, подвижная площадка, которая перемещает записывающие головки, постоянно движется с такой скоростью, чтобы во время одного оборота барабана выполнялось сканирование одной линии основного сканирования.
(Стандартная технология)
Технология, раскрытая в выложенной патентной заявке Японии № 2001-88346 (патентный документ 1), описывается со ссылками на фиг. 8. Лазерный луч L1 и лазерный луч L2, излучаемые соседними записывающими головками, непрерывно записывают изображения в областях А1 и А2 записи. В области С12 записи постепенно уменьшается количество линий основного сканирования, записанных лазерным лучом L1, в то время как количество линий основного сканирования, записанных лазерным лучом L2, постепенно увеличивается, так что граница между соседними областями А1, А2 записи в изображении оказывается незаметной.
В изобретении, описанном в выложенной патентной заявке Японии № 2002-72494 (патентный документ 2), изображение разбивается на множество сегментов, подлежащих записи множеством лазерных лучей, причем скорость субсканирования уменьшается вблизи границ соседних изображений, с тем чтобы регулировать интервалы между линиями основного сканирования. Линии основного сканирования разбиваются в направлении основного сканирования и отделяются и формируются в направлении субсканирования с тем, чтобы исключить различия в наклонах линий основного сканирования. В результате появляется возможность записи высококачественных изображений с высокой скоростью.
В изобретении, описанном в выложенной патентной заявке Японии № 2004-147260 (патентный документ 3), при разбиении одного набора исходных данных изображения, с тем чтобы формирование изображения выполнялось множеством записывающих головок, позиционные смещения частей, полученных в результате разбиения, можно скорректировать простым способом. В частности, один набор данных изображения можно разбить на множество частей на основе областей изображения, соответствующих записывающим головкам, с тем чтобы создать разделенные данные изображения. В соответствии с позиционными смещениями разделенных изображений на основе разделенных данных изображения и результатов определения величин позиционных смещений дополнительно обеспечивается новая зона скорректированных данных изображения. Разделенные данные изображения компонуются в области скорректированных данных изображения на основе позиций, полученных из результатов определения величин позиционных смещений. Таким образом, предотвращаются позиционные смещения между разделенными изображениями.
В изобретении, описанном в патентной заявке Японии № 3604961 (патентный документ 4), область изображения на носителе записи (среде записи) или промежуточном носителе записи (среде записи), где в действительности записывается информация об изображении, разбивается по меньшей мере на два сегмента. Эти сегменты накладываются друг на друга на граничных участках. Блок обнаружения относительных позиционных различий вскрывает три или четыре позиционных метки в зоне облучения, включающей в себя наложенные друг на друга области, и вычисляет величину позиционного смещения зоны облучения исходя из обнаруженного значения величины позиционного смещения между позиционными метками. Блоки формирования информации об изображении формируют информацию об изображении на основе величин позиционного смещения зоны облучения. Блок создания корректированных данных об изображении корректирует данные об изображении для обеспечения соответствия с действительной областью изображения.
Патентный документ 1: Выложенная патентная заявка Японии № 2001-88346.
Патентный документ 2: Выложенная патентная заявка Японии № 2002-872494.
Патентный документ 3: Выложенная патентная заявка Японии № 2004-147260.
Патентный документ 4: Патент Японии № 3604961.
В изобретении, описанном в выложенной патентной заявке Японии № 2001-88346, в области записи, где накладываются изображения, записанные соседними записывающими лучами, количество линий основного сканирования, записываемых одним лазерным лучом, постепенно уменьшается, в то время как количество линий основного сканирования, записываемых другим лазерным лучом, постепенно возрастает, так что граница между соседними изображениями остается незаметной. Однако в этом способе интервалы между линиями сканирования от двух лазерных лучей совсем не регулируются. Следовательно, если позиционное смещение между двумя лазерными лучами составляет половину интервалов сканирования, то на границах между линиями сканирования могут появиться полосы от разных лазерных лучей. В указанном случае, когда имеются границы по всей области наложения, количество полос возрастает и качество изображения ухудшается.
В изобретении, описанном в выложенной патентной заявке Японии № 2002-872494, скорость субсканирования уменьшается вблизи границ соседних изображений для регулировки интервалов между линиями основного сканирования, так что несоответствующие участки на границах остаются незаметными. Однако, чтобы уменьшить скорость субсканирования при спиральном сканировании, необходимы дополнительные операции обработки для исключения различий в наклонах линий основного сканирования. В частности, эти операции обработки включают в себя разбиение линий основного сканирования в направлении основного сканирования для обеспечения их разделения и формирования в направлении субсканирования. Кроме того, при выполнении операций обработки для коррекции наклонов множества линий основного сканирования, между рядом линий основного сканирования, подвергнутых коррекции наклона, и периодами модуляционных схем, использованными для отображения плотности изображения, может возникнуть взаимное влияние. Соответственно, на границах изображений могут появиться видимые полосы. Кроме того, благодаря уменьшению скорости субсканирования фрикционное сопротивление деталей механизма площадки во время субсканирования, например, направляющей штанги, отклоняется от нормальных значений. Соответственно, от нормальных значений отклоняется момент, развиваемый приводом. Таким образом, точность позиций сканирования будет отличаться у сегментов, отсканированных с нормальной скоростью, и сегментов, отсканированных с уменьшенной скоростью; следовательно, на результирующем изображении возможно появление видимых узких полос.
В изобретении, описанном в выложенной патентной заявке Японии № 2004-147260, для каждой записывающей головки предусмотрены встроенные изображения для измерения позиционных смещений, что усложняет конструкцию устройства. Кроме того, не учитываются дробные части позиционных смещений; следовательно, позиционные смещения корректируются не полностью.
Изобретение, описанное в патенте Японии № 3604961, включает в себя облучение трех или четырех позиционных меток в зоне облучения, что усложняет конструкцию устройства.
Соответственно, имеется потребность в устройстве формирования изображения, способе формирования изображения и программном продукте для формирования изображения, где позиционные смещения изображений, записываемых соседними записывающими головками, могут быть скорректированы в направлениях основного сканирования и субсканирования без изменения скорости субсканирования, а различия в плотностях записи между записывающими головками оказываются в записанных изображениях невидимыми.
Сущность изобретения
Настоящее изобретение обеспечивает устройство формирования изображения и способ формирования изображения, где исключен один или несколько из вышеописанных недостатков.
Согласно варианту настоящего изобретения обеспечивается устройство формирования изображения для формирования изображения, соответствующего растеризованным исходным данным изображения, путем разбиения растеризованных исходных данных изображения на области в соответствии с N, где N является целым числом, большим или равным 2, записывающими головками и сканирования одного тела для записи путем одновременного излучения записывающих лучей от N записывающих головок, причем устройство формирования изображения включает в себя: блок запоминания информации о позиционном смещении, сконфигурированный для сохранения информации о позиционном смещении, включающей в себя позиционные смещения записывающих лучей записывающих головок; блок запоминания растеризованных исходных данных изображения, сконфигурированный для сохранения растеризованных исходных данных изображения; блок создания скорректированных данных изображения, сконфигурированный для создания скорректированных данных изображения, разбитых на области в соответствии с записывающими головками, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения, сохраненных в блоке запоминания растеризованных исходных данных изображения, на основе информации о позиционном смещении, так что позиционные смещения корректируют в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей; и блок формирования информации о сканировании, сконфигурированный для формирования информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей, чтобы сканировать тело для записи для записи скорректированных данных изображения.
Согласно варианту настоящего изобретения обеспечивается устройство формирования изображения для формирования изображения, соответствующего растеризованным исходным данным изображения, путем разбиения растеризованных исходных данных изображения на области в соответствии с N, где N является целым числом, большим или равным 2, записывающими головками и сканирования одного тела для записи путем одновременного излучения записывающих лучей от N записывающих головок, причем устройство формирования изображения включает в себя: блок запоминания информации о позиционном смещении, сконфигурированный для сохранения информации о позиционном смещении, включающей в себя позиционные смещения записывающих лучей записывающих головок; блок запоминания растеризованных исходных данных изображения, сконфигурированный для сохранения растеризованных исходных данных изображения; блок создания скорректированных данных изображения, сконфигурированный для создания скорректированных данных изображения, разбитых на области в соответствии с записывающими головками, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения, сохраненных в блоке запоминания растеризованных исходных данных изображения, на основе информации о позиционном смещении, так что позиционные смещения корректируют в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей; и блок формирования информации о сканировании, сконфигурированный для формирования информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей, чтобы сканировать тело для записи для записи скорректированных данных изображения; где блок формирования информации о сканировании формирует информацию о сканировании, с тем чтобы обеспечить зону высокой плотности вблизи начальной позиции сканирования или конечной позиции сканирования, где плотность сканирования в зоне высокой плотности выше, чем в других отсканированных зонах, дополнительные операции сканирования, выполненные для зоны высокой плотности, выделяют и группируют вместе в соответствии с предварительно определенными интервалами, а операции субсканирования выполняют для каждой группы между выполнением операций основного сканирования, причем операции субсканирования выполняют для указанных групп по существу с одинаковыми скоростями.
Согласно варианту настоящего изобретения обеспечивается способ формирования изображения для формирования изображения, соответствующего растеризованным исходным данным изображения, путем разбиения растеризованных исходных данных изображения на области в соответствии с N, где N является целым числом, большим или равным 2, записывающими головками и сканирования одного тела для записи путем одновременного излучения записывающих лучей от N записывающих головок, причем способ формирования изображения включает в себя: (а) создание скорректированных данных изображения, разбитых на области в соответствии с записывающими головками, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения на основе предварительно запомненной информации о позиционном смещении, включающей в себя позиционные смещения записывающих лучей записывающих головок, так что позиционные смещения корректируют в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей; и (b) формирования информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей, чтобы сканировать тело для записи для записи скорректированных данных изображения.
Согласно варианту настоящего изобретения обеспечивается способ формирования изображения для формирования изображения, соответствующего растеризованным исходным данным изображения, путем разбиения растеризованных исходных данных изображения на области в соответствии с N, где N является целым числом, большим или равным 2, записывающими головками и сканирования одного тела для записи путем одновременного излучения записывающих лучей от N записывающих головок, причем способ формирования изображения включает в себя: (а) создание скорректированных данных изображения, разбитых на области в соответствии с записывающими головками, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения на основе предварительно запомненной информации о позиционном смещении, включающей в себя позиционные смещения записывающих лучей записывающих головок, так что позиционные смещения корректируют в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей; и (b) формирование информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей, чтобы сканировать тело записи для записи скорректированных данных изображения; где этап (b) включает в себя формирование информации о сканировании, с тем чтобы обеспечить зону высокой плотности вблизи начальной позиции сканирования или конечной позиции сканирования, где плотность сканирования в зоне высокой плотности выше, чем в других отсканированных зонах, дополнительные операции сканирования, выполненные для зоны высокой плотности, выделяют и группируют вместе в соответствии с предварительно определенными интервалами, а операции субсканирования выполняют для каждой группы между выполнением операций основного сканирования, причем операции субсканирования выполняют для указанных групп по существу с одинаковыми скоростями.
Согласно одному варианту настоящего изобретения обеспечены устройство формирования изображения и способ формирования изображения, где позиционные смещения изображений, записанных соседними записывающими головками, могут быть скорректированы в направлениях основного сканирования и субсканирования без изменения скорости субсканирования и различия в плотностях записи между записывающими головками невидимы в записанных изображениях.
Краткое описание чертежей
Фиг.1 - вид сбоку записывающих головок с местным разрезом;
фиг.2 - пример изображений, когда позиции записи записывающих головок являются идеальными;
фиг.3 - пример изображений при реальных позициях записи записывающих головок;
фиг.4 - схема, описывающая позиционное смещение;
фиг.5 - другая схема, описывающая позиционное смещение;
фиг.6 - изображение в перспективе устройства формирования изображения, которое реализует способ пошагового сканирования;
фиг.7 - изображение в перспективе устройства формирования изображения, которое реализует способ спирального сканирования;
фиг.8 - схема, описывающая стандартную технологию;
фиг.9А, 9В, 9С - схемы, описывающие базовый принцип первого варианта согласно настоящему изобретению;
фиг. 10 - функциональная блок-схема устройства формирования изображения согласно первому варианту настоящего изобретения;
фиг. 11 - схематичный вид области Q для запоминания записывающегося изображения;
фиг. 12 - поясняющая схема зазора между записывающими лучами от соседних записывающих головок;
фиг. 13 - поясняющая схема частично наложенных друг на друга записывающих лучей от соседних записывающих головок;
фиг. 14 - схематическое представление зоны QF точного управления;
фиг. 15 - схематическое представление информации о сканировании;
фиг. 16 - пояснительная схема данных (Q) изображения;
фиг.17А, 17В - пояснительные схемы регулировок в зоне QF точного управления;
фиг.18 - другая пояснительная схема регулировок в зоне QF точного управления;
фиг. 19 - еще одна пояснительная схема регулировок в зоне QF точного управления;
фиг. 20 - схема позиций записи, скорректированных также в направлении ширины;
фиг. 21 - схема данных (Q) изображения;
фиг. 22 - блок-схема процесса формирования изображения;
фиг. 23 - пояснительная схема третьего варианта согласно настоящему изобретению;
фиг. 24 - еще одна пояснительная схема третьего варианта; и
фиг. 25 - пояснительная схема пятого варианта согласно настоящему изобретению.
Предпочтительный вариант осуществления изобретения
Описание вариантов осуществления изобретения дано со ссылками на сопроводительные чертежи.
[Первый вариант]
Базовый принцип первого варианта согласно настоящему изобретению описан со ссылками на фиг.9А, 9В, 9С.
На фиг. 9А показаны идеальные области записи трех записывающих головок (первой записывающей головки, второй записывающей головки и третьей записывающей головки).
P1 является областью записи первой записывающей головки, P2 является областью записи второй записывающей головки, а P3 является областью записи третьей записывающей головки. На фиг.9А, 9В, 9С направление по вертикали (направление Y) называется направлением основного сканирования, а направление по горизонтали (направление Х) называется направлением субсканирования.
На фиг. 9А растеризованные исходные данные изображения воспроизводятся точно. Однако в действительности данные изображения записываются записывающими головками так, как показано сплошными линиями на фиг. 9В. H1 обозначает действительную область записи первой записывающей головки, H2 обозначает действительную область записи второй записывающей головки, а H3 обозначает действительную область записи третьей записывающей головки. Соответственно, первая записывающая головка излучает записывающий луч перед идеальной позицией на расстоянии X1, а вторая записывающая головка излучает записывающий луч за идеальной позицией на расстоянии Х2 и в позиции, смещенной в направлении субсканирования на расстояние Y1. Третья записывающая головка излучает записывающий луч в идеальной области записи.
В состоянии, показанном на фиг. 9В, имеется пустая зона (Y1) и зона наложения (Y2), причем верхние части зон записи не выровнены.
Чтобы изменить состояние, показанное на фиг. 9В, до состояния, показанного на фиг. 9С, в область записи первой записывающей головки включена пустая зона (Y1), при этом первая записывающая головка выполнена с возможностью излучения записывающего луча за идеальную позицию на расстоянии X1, а вторая записывающая головка излучает записывающий луч перед идеальной позицией на расстоянии X2.
Благодаря записи данных изображения, показанных на фиг. 9С, с помощью записывающих головок, имеющих свойства, показанные на фиг. 9В (вдобавок, область записи первой записывающей головки расширяют на расстояние Y1), исходные данные изображения могут быть воспроизведены правильным образом.
Ниже приводится подробное описание первого варианта осуществления изобретения.
(Блок-схема устройства формирования изображения)
Предполагается, что устройство формирования изображения согласно первому варианту имеет структуру, аналогичную структуре, описанной со ссылками на фиг. 6.
На фиг. 10 представлена блок-схема устройства формирования изображения согласно первому варианту. Устройство формирования изображения, показанное на фиг. 10, включает в себя блок 21 приема исходных данных изображения, блок 22 запоминания растеризованных исходных данных (P) изображения, блок 23 запоминания информации о позиционном смещении, блок 24 создания данных (Q) изображения, блок 25 запоминания данных (Q) изображения, блок 26 формирования информации о сканировании, блок 27 управления считыванием, буферы с 281 по 28N, блок 29 управления приводом барабана, блок 30 управления площадкой, блоки с 311 по 31N управления возбуждением и записывающие головки с 321 по 32N.
Блок 21 приема исходных данных изображения принимает исходные данные изображений, подлежащих формированию устройством формирования изображения. Полученные данные, то есть растеризованные исходные данные (P) изображения загружают в блок 22 запоминания растеризованных исходных данных (P) изображения.
Блок 23 запоминания информации о позиционном смещении сохраняет информацию о позиционном смещении. В первом варианте на тело для записи предварительно наносится опорное изображение (маркер), и это нанесенное изображение (маркер) используют для измерения позиционного смещения записывающего луча от записывающей головки 32. Информацию о позиционном смещении получают на основе измеренного позиционного смещения и загружают ее в блок 23 запоминания информации о позиционном смещении.
Растеризованные исходные данные (P) изображения, загруженные в блок 22 запоминания растеризованных исходных данных (P) изображения, записываются записывающими головками 32 на основе информации о позиционном смещении, загруженной в блок 23 запоминания информации о позиционном смещении. Перед действительной записью данных блок 24 создания данных (Q) изображения может изменить растеризованные исходные данные (P) изображения на данные (Q) изображения, чтобы скорректировать позиционные смещения в направлении основного сканирования и/или направлении субсканирования. Данные (Q) изображения, полученные путем изменения растеризованных исходных данных (P) изображения, загружают в блок 25 запоминания данных (Q) изображения.
Блок 27 управления считыванием считывает пиксели данных (Q) изображения, загруженные в блок 25 запоминания данных (Q) изображения, и последовательно передает эти пиксели в буферы с 281 по 28N. После последовательного приема данных (Q) изображения буферы с 281 по 28N временно запоминают предварительно определенное количество линий (по меньшей мере одну линию) в связи с записывающими головками с 321 по 32N.
Как показано на фиг. 11, блок 25 запоминания данных (Q) изображения включает в себя область Q запоминания записывающегося изображения, которая представляет собой область для запоминания изображения, подлежащего записи. Область Q запоминания записывающегося изображения хранит данные (Q) изображения, которые разбиты на N частей, в связи с N записывающими головками.
Область Q1 запоминания связана с первой записывающей головкой 321, область Q2 запоминания связана со второй записывающей головкой 322, а область QN запоминания связана с N-й записывающей головкой 32N.
Каждая из областей с Q1 по QN запоминания имеет z бит в направлении основного сканирования и zw бит в направлении субсканирования (всего z бит·zw бит).
Блок 27 управления считыванием считывает пиксели в каждой из областей с Q1 по QN запоминания в порядке 1, 2, 3 …, z, z+1, z+2, z+3 …, 2z, …, z·Nw и пересылает эти пиксели в соответствующие буферы с 281 по 28N
Биты "1, 2, …, z" в области Q1 запоминания записываются на тело для записи при первом сканировании (далее “L[1]”), а биты “z+1, z+2, …, z+z” записываются на тело записи при втором сканировании (далее “L[2]”) и т.д.
Блок 26 формирования информации о сканировании формирует информацию о сканировании, соответствующую данным (Q) изображения, загруженным в блок 25 запоминания данных (Q) изображения. На основе информации о сканировании блок 29 управления приводом барабана и блок 30 управления площадкой выполняют основное сканирование и субсканирование.
Информация о сканировании, сформированная блоком 26 формирования информации о сканировании, пересылается в блок 30 управления площадкой и блоки 31 управления возбуждением. Блок 30 управления площадкой заставляет подвижную площадку перемещаться в соответствии с порядком в информации о сканировании. В частности, блок 30 управления площадкой получает информацию о сканировании и определяет позицию подвижной площадки. Сначала блок 30 управления площадкой перемещает подвижную площадку в позицию первого сканирования L[1], и каждый раз, когда барабан делает один оборот, подвижная площадка перемещается на позицию, соответствующую следующей информации о сканировании, например, позицию второго сканирования L[2], позицию третьего сканирования L[3] и т.д. Подвижная площадка перемещается при столкновении с областями барабана, где изображения не записаны и записывающие лучи не излучаются. Например, подвижная площадка перемещается синхронно с сигналом исходного положения барабана. Когда подвижная площадка подошла к позиции сканирования, данные изображения, связанные с информацией о сканировании, соответствующей этой позиции сканирования, записываются на барабан. Блок 31 управления возбуждением возбуждает записывающую головку 32 и включает/выключает записывающий луч в соответствии с данными изображения. Основное сканирование выполняется посредством поворота барабана, а субсканирование выполняется посредством перемещения подвижной площадки.
Блок 30 управления площадкой управляет подвижной площадкой, на которой смонтированы записывающие головки 32, и выполняет функции синхронизации с блоком 29 управления приводом барабана в соответствии с информацией о сканировании и приема информации о сканировании.
Конфигурация, показанная на фиг. 10, также применима к другим вариантам.
Далее описывается процесс, выполняемый блоком 24 создания данных (Q) изображения согласно первому варианту осуществления изобретения. В частности, блок 24 создания данных (Q) изображения изменяет растеризованные исходные данные (P) изображения, загруженные в блок 22 запоминания (растеризованных исходных данных (P) изображения), на данные (Q) изображения, загруженные в блок 25 запоминания данных (Q) изображения.
(Растеризованные исходные данные (P) изображения и данные (Q) изображения)
В области P запоминания исходного растрового изображения блока 22 запоминания растеризованных исходных данных (P) изображения хранятся растеризованные исходные данные (P) изображения. Блок 24 создания данных (Q) изображения изменяет растеризованные исходные данные (P) изображения на данные (Q) изображения и загружает данные (Q) изображения в область Q запоминания записывающегося изображения блока 25 запоминания данных (Q) изображения.
С целью упрощения положим, что количество N записывающих головок 32 равно четырем. Записывающие головки 32 смонтированы на подвижной площадке, способной перемещаться в аксиальном направлении барабана. Записывающие головки 32 обозначены как R[1], R[2], R[3], R[4] слева направо в аксиальном направлении барабана. Записывающие лучи, излучаемые записывающими головками 32, обозначены как Rb1, Rb2, Rb3, Rb4 слева направо в аксиальном направлении барабана. Записывающие лучи, излучаемые множеством записывающих головок 32, скомпонованы таким образом, чтобы облучать тело 11 для записи по линиям вдоль аксиального направления барабана по существу с равными интервалами между ними. Если субсканирование идет в направлении слева направо, то перед началом записи изображения головка Rb1 находится с левой стороны вне левого края области записи тела для записи. Соответственно, может быть отсканирована вся область записи тела 11 для записи.
В первом варианте записывающие головки 32 расположены с интервалами 100 мм. Предписанная плотность p записи изображения составляет 1 линия/мм.
Следовательно, предписанная ширина w записи, выделенная для каждой записывающей головки, составляет 100 мм, так что сканируется 100 линий. При четырех записывающих головках записывается изображение шириной 400 мм. Диаметр барабана составляет 200 мм. Окружность барабана примерно равна 628 мм. Окружность записи на теле 11 для записи составляет 500 мм.
Таким образом, размер изображения, подлежащего записи (далее «размер записывающегося изображения») составляет 400 мм по ширине и 500 мм по высоте. Далее аксиальное направление барабана называется направлением (Х) по горизонтали (направление субсканирования), а направление по окружности барабана называется направлением (Y) по высоте (направление основного сканирования). В пикселях этот размер записывающегося изображения соответствует 400 точкам в направлении по горизонтали и 500 точкам в направлении по высоте.
Размер области P запоминания исходного растрового изображения по меньшей мере таков, как размер записывающегося изображения (то есть не равен размеру изображения после записи, но равен размеру информации изображения, подлежащей записи), с тем чтобы разместить информацию изображения из 400 точек в направлении по горизонтали и 500 точек в направлении по высоте. Действительным размером изображения является размер полученных растеризованных исходных данных (P) изображения. Здесь предполагается, что размер растеризованных исходных данных (P) изображения имеет ширину Pw и высоту Ph.
Подвижная площадка 15 способна перемещаться на расстояние, большее предписанной ширины w записи. Подвижная площадка 15 располагается при начале записи слева в аксиальном направлении барабана и перемещается вправо в процессе записи изображения. В первом варианте предполагается, что устройство формирования изображения выполняет пошаговое сканирование.
(Информация о позиционном смещении)
Далее описывается информация о позиционном смещении, которая предварительно загружается в блок 23 запоминания информации о позиционном смещении. В первом варианте информация о позиционном смещении представляет относительные расстояния между двумя записывающими головками, как было описано со ссылками на фиг. 5.
Для соседних записывающих лучей, таких как Rb1 и Rb2, Rb2 и Rb3, Rb3 и Rb4 и т.д. информация о позиционном смещении в направлении X выражается как Dx[1], Dx[2], Dx[3], а информация о позиционном смещении в направлении Y выражается как Dy[1], Dy[2], Dy[3]. Если Dx[m] (m=1, 2, 3, …, N-1) положительно, то между заданными записывающимися изображениями Rb[m] и Rb[m+1] образуются зазоры. Если Dx[m] (m=1, 2, 3, …, N-1) отрицательно, то между заданными записывающимися изображениями Rb[m] и Rb[m+1] будет иметь место область наложения. Если Dy[m] положительно между заданными записывающимися изображениями Rb[m] и Rb[m+1], то изображение Rb[m+1] смещается вниз.
Для Dx[m] (m=1, 2, 3, …, N-1), Dy[m] (m=1, 2, 3, …, N-1) задаются максимальные допустимые значения Dx1, Dy1. Соответственно, удовлетворяются неравенства -Dx1≤Dx[m]≤Dx1 (m=1, 2, 3,…, N-1) и -Dy1≤Dy[m]≤Dy1 (m=1, 2, 3,…, N-1). Максимальные допустимые значения определяют заранее с учетом точности сборки механизма и разброса позиций сборки. В первом варианте предполагается следующая информация о позиционном смещении:
Dx[1]=2,3 мм, Dx[2]=-1,0 мм, Dx[3]=0,5 мм,
Dy[1]=1,1 мм, Dy[2]=-3,2 мм, Dy[3]=0,0 мм.
Выделяют значение Dxmax, которое является максимальным значением Dx. В первом варианте Dxmax=Dx[1]=2,3 мм.
Кроме того, Dy[1] является относительным значением применительно к соседней области, так что суммирование выполняется последовательно от Dy[1], чтобы обеспечить преобразование в высоту yn c Rb1 в качестве эталона. Это получается в виде yn[1]=0, yn[2]=Dy[1], yn[3]=Dy[1]+Dy[2], yn[4]=Dy[1]+Dy[2]+Dy[3].
В первом варианте yn[1]=0 мм, yn[2]=1,1 мм, yn[3]=-2,1 мм, yn[4]=-2,1 мм.
Далее выделяют Dynmax, являющееся максимальным значением Dyn, и Dynmin, являющееся минимальным значением Dyn. Соответственно Dynmax=Dyn[2]=1,1 мм, Dynmin=Dyn[3]=-2,1 мм.
Также для yn задается допустимый диапазон в виде:
-yn1≤yn≤+yn1.
(Создание ширины Qw данных (Q) изображения)
Данные Q изображения запоминаются в области Q запоминания записывающегося изображения на основе информации о позиционном смещении и растеризованных исходных данных (P) изображения. Размер данных (Q) изображения характеризуется шириной Qw и высотой Qh.
Далее описывается, как определяется ширина Qw и высота Qh данных (Q) изображения на основе информации о позиционном смещении и растеризованных исходных данных (P) изображения.
Предписанные ширина w записи и Dxmax суммируются, в результате чего получаем w+Dxmax = 102,3 мм. Эта величина выражает расстояние между лучами, когда соседние записывающие лучи находятся максимально далеко друг от друга. Этот результат умножают на предписанную плотность p записи изображения для получения количества линий сканирования в виде (Dw+Dxmax)·p=102,3 линий. В этом случае Dxmax является позиционным смещением между Rb1 и Rb2, которое означает, что между записывающимися изображениями Rb1 и Rb2 имеется зазор размером 2,3 точки. Предписанная ширина w записи составляет 100 линий; следовательно, образуется зазор из 2,3 точки, как показано на фиг. 12. Этот зазор может быть заполнен или уменьшен путем увеличения предписанной ширины w записи. В результате увеличения предписанной ширины w записи до 102 точек зазор становится равным 0,3 точки.
В первом варианте для предотвращения появления каких-либо зазоров дробная точка округляется до целой точки.
Таким образом, если зазор составляет 2,3 точки, то инициируют наложение Rb1 и Rb2 друг на друга на величину 0,7 точки, как показано на фиг. 13.
Предписанную ширину w записи получают из максимального позиционного смещения Dxmax. Следовательно, путем задания предписанной ширины w записи, равной 103 точки для всех записывающих головок, можно предотвратить появление зазоров между записывающимися изображениями записывающих лучей.
Если Dxmax отрицательно, например, равно -2,7 мм, выполняется аналогичный процесс. Отрицательное значение Dxmax указывает на то, что между записывающимися изображениями имеется часть с наложением. В данном примере w+Dxmax = 97,3 мм. Предписанная ширина w записи становится равной 98 точек, так что часть с наложением составит 0,7 точки.
(Задание области QF точного управления)
Далее учитываются области с наложением, соответствующие дробным точкам. Когда записывающееся изображение Rb1 и записывающееся изображение Rb2 накладываются друг на друга, на величину, равную дробной точке, меньшей целой точки, необходимо переместить позицию записи изображения для Rb2. Однако все записывающие головки перемещаются одновременно на единой подвижной площадке. Следовательно, чтобы переместить только Rb2, потребуется другое средство перемещения. Соответственно, формируется область QF точного управления, в которой увеличена плотность записи изображения. Например, как показано на фиг. 14, в области записи записывающего луча плотность записи изображения учетверяется в направлении X для первых четырех линий. Множитель для плотности записи, используемый для увеличения плотности записи изображения, выражается как u(u≥1). Соответственно, можно создать данные изображения в единицах, составляющих 1/u точки. При учетверении плотности между предписанными линиями сканирования (например, L1, L5: точки, показанные окружностями из жирных линий, сканируют от верхней окружности к нижней окружности) добавляется три линии сканирования (например, L2, L3, L4: точки, показанные окружностями из тонких линий, сканируют с верхней окружности к нижней окружности). Добавленные операции сканирования 3×3 называют «дополнительным сканированием». Соответственно, в зоне QF точного управления добавляется девять линий сканирования, что получается из следующего: (u-1)·(u-1)=3 линии·3=9 линий.
Ширину по горизонтали для размера изображения, выделенную для каждой записывающей головки, получают путем добавления предписанной ширины w записи к зоне QF точного управления в виде 103+9=112 точек, и далее она называется базовой шириной Nw.
Nw=w+D{Dxmax}+(u-1)·(u-1).
Операция округления значения “a” до целого выражается как D{a}.
Как показано на фиг. 11, вся ширина Qw области Q запоминания записывающегося изображения соответствует N записывающим головкам, скомпонованным по горизонтали, где каждая записывающая головка имеет базовую ширину Nw. Таким образом, вся ширина Qw области Q запоминания записывающегося изображения выражается следующим уравнением:
Qw=Nw·N.
(Создание высоты Qh данных (Q) изображения)
Далее высота Qh изображения области Q запоминания записывающегося изображения выражается следующим уравнением:
Qh=Ph+D{Dynmax-Dymin}.
В этом примере, когда Ph равно 500 точкам, высота изображения составляет 504 точки. Высота может быть постоянно равна максимальной, что выражается в виде Qh=Ph+D{2·Dyn1}.
Выше описан один пример способа определения ширины Qw и высоты Qh области Q запоминания записывающегося изображения. Ширина Qw и высота Qh соответствуют размеру данных изображения и не являются действительной шириной и высотой изображения, записанного на теле для записи. Если данные изображения записаны путем сканирования с высокой плотностью, то записанное изображение оказывается сжатым.
(Информация о сканировании)
Информацию о сканировании создают в связи со строчными данными в направлении высоты данных (Q) изображения.
Информация о сканировании включает в себя порядок, в котором сканируются строки в направлении высоты изображения, и позиции сканирования.
Информацию о сканировании получают следующим образом:
на основе множителя u плотности записи, предписанной плотности k записи изображения, информации о позиционном смещении, предписанной ширине w записи и базовой ширине Nw. Сканирование для зоны QF точного управления выполняется для длины из a сканирований при предписанной плотности p записи изображения.
В первом варианте предполагается, что a=u=4. Как показано на фиг. 15, позиция сканирования для крайней левой строки представляет собой L[1]=1, для второй строки L[2]=1,25, для третьей строки L[3]=1,5 и т.д. Позиции сканирования представлены в единицах, равных одному сканированию при предписанной плотности p записи изображения, причем позиции сканирования, увеличенные в зоне QF точного управления, представлены дробными числами.
Для растеризованных исходных данных (P) изображения, составляющих 400·500 точек, область записывающегося изображения, имеющая ширину 448 точек и высоту 504 точки, обеспечена в виде данных (Q) изображения. Эти данные изображения загружают в область Q запоминания записывающегося изображения блока 25 запоминания данных (Q) изображения. Информация о сканировании включает в себя порядок сканирования, и, следовательно, информация о сканировании будет одинаковой для всех четырех записывающих головок. Одну и ту же информацию о сканировании повторно связывают со скомпонованными данными изображения. Соответственно, информация о сканировании указывает позиции операций сканирования для строк в направлении высоты данных (Q) изображения.
В случае пошагового сканирования информация о сканировании включает в себя позиции сканирования и порядок сканирования для данных в направлении основного сканирования данных (Q) изображения, подлежащих сканированию. В данных (Q) изображения первая запись в направлении основного сканирования выполняется на позиции L[1] сканирования. При загрузке в буфер первого набора данных (Q) изображения для основного сканирования блок 30 управления площадкой считывает информацию L[1] о сканировании и перемещает подвижную площадку на позицию, указанную в информации L[1]. Когда блок 30 управления площадкой завершает перемещение подвижной площадки до позиции, указанной как L[1], блоки 31 управления возбуждением получают от блока 29 управления приводом барабана угловое положение барабана и включают/выключают записывающие головки на основе буферных данных на предварительно определенных позициях барабана синхронно с вращением барабана. При завершении сканирования для одной линии основного сканирования в буфер загружают второй набор данных (Q) изображения для основного сканирования, и выполняется аналогичный процесс на основе информации L[2] о сканировании. Этот же процесс повторяется для последующих наборов информации о сканировании, пока не завершится сканирование для информации о сканировании по последней позиции. Вышеописанное является примером пошагового сканирования.
В случае спирального сканирования блок 30 управления площадкой считывает информацию L[1] сканирования. Если текущая позиция сканирования не достигла позиции для L[1], то блок 30 управления площадкой продолжает перемещать подвижную площадку. Когда текущая позиция сканирования проходит позицию для L[1], блок 30 управления площадкой перемещает подвижную площадку назад (возврат во избежание наложения записи). В нормальных ситуациях блок 30 управления площадкой продолжает перемещать подвижную площадку вперед. Блок 30 управления площадкой последовательно передает текущую позицию площадки в блоки 31 управления возбуждением. Блок 29 управления приводом барабана последовательно передает в блоки 31 управления возбуждением угловое положение барабана. Когда блоки 31 управления возбуждением обнаруживают, что позиция площадки достигла позиции для L[1], блоки 31 управления возбуждением включают/выключают записывающие головки на основе буферных данных синхронно с вращением барабана. Когда записаны буферные данные для одной операции основного сканирования, выполняется аналогичный процесс на основе следующей информации L[2] о сканировании. Этот же процесс повторяется, пока не совершится сканирование для информации о сканировании в последней позиции.
Когда текущая позиция сканирования прошла позицию в информации о сканировании, блок 30 управления площадкой перемещает подвижную площадку назад к опорной позиции, например, к исходной позиции. Чтобы выполнить сканирование на позиции, заданной информацией о сканировании, блок 30 управления площадкой управляет скоростью подвижной площадки синхронно с угловым положением барабана, полученным от блока 29 управления приводом барабана, и перемещает подвижную площадку с заранее определенной постоянной скоростью.
(Создание данных (Q) изображения)
Данные изображения изменяют и передают из области P запоминания исходного растрового изображения блока 22 запоминания растеризованных исходных данных (P) изображения в область Q запоминания записывающегося изображения блока 25 запоминания данных (Q) изображения.
Эта операция описывается ниже.
Изначально для изображения в области Q запоминания записывающегося изображения задается значение данных для случая невыполнения записи изображения. Ширину Rpw изображения, выделенную для каждой записывающей головки, определяют на основе предписанной ширины w записи и Dx (m=1, 2, 3, …, N-1) следующим образом:
В первом варианте, как было описано выше, предполагается следующее:
Dx[1]=2,3 мм, Dx[2]=-1,0 мм, Dx[3]=0,5 мм.
Таким образом, в случае записывающей головки R[1] имеется Rpw[1]=103 точки. Аналогичным образом, для записывающих головок R[2] и R[3] имеется Rpw[2]=99 точкам и Rpw[3]=101 точке. Для последней, четвертой записывающей головки R[4] используют максимальную ширину Dxmax позиционного смещения, так что Rpw[4]=103 точкам.
Как указано с помощью ссылки (А) на фиг. 16, точки с первой точки слева по точку в Rpw[1] в изображении области P запоминания исходного растрового изображения выделены для записывающей головки R[1]. Точки с Rpw[1]+1 по Rpw[1]+Rpw[2] выделены для записывающей головки R[2]. Точки с Rpw[1]+Rpw[2]+1 по Rpw[1]+Rpw[2]+Rpw[3] выделены для записывающей головки R[3]. Точки с Rpw[1]+Rpw[2]+Rpw[3]+1 по Rpw[1]+Rpw[2]+Rpw[3]+Rpw[4] выделены для записывающей головки R[4].
(Позиционная регулировка в направлении высоты)
В то же самое время выполняются позиционные регулировки в направлении высоты в соответствии со значением yn.
Область P запоминания исходного растрового изображения указана на фиг. 16 как (А), а область Q запоминания записывающегося изображения указана на фиг. 16 как (В). Данные в направлении высоты для первой точки с левой части изображения в области P запоминания исходного растрового изображения, которая находится в диапазоне, выделенном для записывающей головки R[1], передаются в первую точку слева в области Q запоминания записывающегося изображения, с тем чтобы точки располагались, начиная с точки на позиции D{Dynmax-Dyn[m] + 1}, отсчитываемой сверху. Данные в направлении высоты второй точки слева в области P пересылаются в пятую точку слева в области Q, чтобы они располагались, начиная с точки D{Dynmax-Dyn[1] + 1}, отсчитываемой сверху. В диапазоне, выделенном для записывающей головки R[1], точное управление не выполняется; следовательно, данные из P не передаются в строку в область Q, где информация о сканировании указывает дробное число. Остальные данные передаются из P в Q таким же образом, и, наконец, данные в направлении высоты для точки в Rpw[1] в области P слева передаются в точку на позиции Rpw[1] + 9 в Q слева, чтобы данные располагались, начиная с точки на позиции D{Dynmax-Dyn[1]+1}, отсчитываемой сверху.
(Регулировка в зоне QF точного управления)
Когда между записывающей головкой R[1] и соседней записывающей головкой R[2] имеется область наложения, области QF точного управления обычно накладываются друг на друга.
Если в зонах QF точного управления, показанных на фиг. 17А, регулировки не выполняются, то бит, отсканированный последним записывающей головкой R[1], и бит, отсканированный записывающей головкой R[2] первым, оказываются слишком близко друг к другу; это приводит к появлению полос на границе.
Для решения этой проблемы, как показано на фиг. 17В, выполняют регулировки в области регулировки записывающей головки R[2], так чтобы между линиями сканирования оказались по существу равные интервалы.
Далее следует общее описание операции, выполняемой записывающей головкой R[m] (m=2, 3, …, N) в выделенном диапазоне. Данные в направлении высоты передаются таким образом, чтобы они располагались, начиная с точки на позиции D{Dynmax-Dyn[m] + 1}, отсчитываемой сверху. В направлении по горизонтали в информации о позиционном смещении указаны дробные числа, с тем чтобы учесть зоны QF точного управления. Дробное число DxR в области, выделенной для каждой записывающей головки, получается следующим образом:
DxR[m]=1-Rpw[m-1]+(w+Dx[m-1])·p.
Единицей измерения является точка.
В первом варианте, когда m = 2, удовлетворяется равенство DxR[m] = 0,3. Это означает, что интервалы сканирования между сканированием, выполняемым записывающими головками Rb[m-1] и Rb[m], соответствуют 0,3 точки при предписанной плотности p записи изображения, как показано на фиг. 18. Чтобы скорректировать это дробное число в зоне QF точного управления, учитывается ширина (u-1)+DxR[m], включающая в себя зону QF точного управления. Этот диапазон регулируется u-1 линиями сканирования, и, следовательно, изображения предпочтительно записываются с интервалами ((u-1)+DxR[m])/u. Соответственно, позиция сканирования l[m,k] k-й линии (k=1, 2, …, u-1), сканируемая головкой Rb[m], должна определяться следующим образом:
l[m,k]=(((u-1)+DxR[m])/u)·k-DxR[m]+1.
В частности, 0,3 точки делят на четыре и добавляют в интервалы сканирования зоны QF точного управления. В результате, как показано на фиг. 19, в первом варианте получается следующее:
l[2,1]=1,525, l[2,2]=2,35, l[2,3]=3,175
Данные изображения изменяют и передают из области P запоминания исходного растрового изображения блока 22 запоминания растеризованных исходных данных (P) изображения в область Q запоминания записывающегося изображения блока 25 запоминания данных (Q) изображения на позицию, где позиция 1 сканирования и информация L о сканировании наиболее совпадают. Выше был описан случай, когда m=2; аналогичный процесс выполняется при m, большем 2.
Когда переданы все данные (P) растеризованного исходного изображения в области P запоминания исходного растрового изображения и не имеется достаточно данных, подлежащих передаче, для заполнения области Q запоминания записывающегося изображения, также передаются данные, указывающие, что записывающая головка не излучает записывающий луч.
Предположим, что имеется N записывающих головок, и тогда ширина, с которой может быть выполнена запись N записывающими головками, не обязательно равна ширине растеризованных исходных данных (P) изображения. Если ширина растеризованных исходных данных (P) изображения уже, то будут иметь место записывающие головки, которые не записывают данные в растеризованных исходных данных (P) изображения. В этом случае растеризованные исходные данные (P) изображения не обязательно разбиваются на N частей. Например, ширина растеризованных исходных данных (P) изображения делится на ширину, выделенную каждой записывающей головке, а дробные части округляют до целых, в результате чего получают число, на которое делятся растеризованные исходные данные (P) изображения.
Путем передачи данных записывающегося изображения из области P запоминания исходного растрового изображения в область Q запоминания записывающегося изображения, как было описано выше, созданные данные (Q) изображения смещаются по высоте в направлении, противоположном информации о позиционном смещении. Соответственно, позиционное смещение по высоте сдвигается, так что высоты записывающихся изображений выравниваются. Также корректируются позиции записи в направлении ширины, как показано на фиг. 20. Дробная точка, меньше, чем целая точка, остается в направлении высоты; следовательно, дробная точка добавляется в виде Lh к информации о сканировании для каждой строки в направлении высоты.
Блоки 31 управления возбуждением, показанные на фиг. 10, изменяют временные соотношения на основе информации Lh о высоте в информации о сканировании. Путем изменения временных соотношений для возбуждения позиция по высоте для изображения, сформированного на теле для записи, может быть изменена на дробную точку, меньшую, чем целая точка. Например, сигналы, задающие временные соотношения для записи, регулируют, чтобы они поступали циклически с циклом, в 16 раз превышающим цикл, необходимый для действительной предписанной плотности p записи изображения. Соответственно, стартовая позиция сканирования может быть изменена в единицах, равных 1/16 точки. Выполняя это изменение на основе информации Lh о сканировании, можно сместить ошибки на дробные точки в направлении по высоте для записывающегося изображения.
Таким образом, создаются данные (Q) области Q запоминания записывающегося изображения. На фиг. 21 представлена схема созданных данных (Q) изображения.
Выше был описан один пример для единицы изменения позиции данных. Записывающая головка записывает изображение на основе данных изображения в созданной таким образом области Q запоминания записывающегося изображения и информации о сканировании.
Пиксели изображения записывают в вышеописанном порядке сканирования, показанном на фиг. 11. N записывающих головок записывают одновременно N пикселей. Направление по высоте изображения соответствует основному сканированию в направлении вращения барабана, а направление по горизонтали соответствует субсканированию в аксиальном направлении барабана.
(Процесс формирования изображения)
Процесс формирования изображения согласно первому варианту описывается со ссылками на фиг. 22.
Этап S1: Блок 21 приема исходных данных изображения принимает растеризованные исходные данные (P) изображения и загружает их в блок 22 запоминания исходных данных (Р) изображения.
Этап S2: Блок 24 создания данных (Q) изображения перекомпоновывает данные изображения из растеризованных исходных данных (Р) изображения, сохраненных в блоке 22 запоминания растеризованных исходных данных (Р) изображения, на основе контентов, запомненных в блоке 23 запоминания информации о позиционном смещении, и пересылает перекомпонованные данные в блок 25 запоминания данных (Q) изображения.
Этап S3: Блок 26 создания информации о сканировании создает информацию о сканировании в связи с данными (Q) изображения на основе контентов, запомненных в блоке 23 запоминания информации о позиционном смещении.
Этап S4: Блок 30 управления площадкой перемещает подвижную площадку к начальной позиции сканирования синхронно с блоком 29 управления приводом барабана путем использования блока синхронизации.
Этап S5: Блок 30 управления площадкой принимает информацию о сканировании с помощью блока приема информации о сканировании.
Этап S6: Данные (Q) изображения, связанные с информацией о сканировании, пересылаются в буферы с 281 по 28N.
Этап S7: Ожидание данных, соответствующих одной операции сканирования, подлежащих загрузке в буферы с 281 по 28N.
Этап S8: Перемещение подвижной площадки на позицию, заданную информацией о сканировании.
Этап S9: Блоки с 311 по 31N управления возбуждением включают/выключают записывающие лучи в соответствии с данными в буферах с 281 по 28N синхронно с угловыми положениями барабана.
Этап S10: Определение того, завершена ли запись данных, соответствующих одной операции сканирования.
Этап S11: Определение того, имеется ли следующая информация о сканировании. Если да, то повторяются шаги с S5 по S9 для следующей информации о сканировании.
Этапы S12, S13: Когда на шаге S11 определено, что больше нет информации о сканировании, то блок 29 управления приводом барабана останавливает барабан, блок 30 управления площадкой перемещает подвижную площадку в заранее определенное положение и процесс заканчивается.
Если информация о позиционном смещении изменяется не часто, то эта информация каждый раз будет одной и той же, и в этом случае вместо того, чтобы определять информацию о сканировании каждый раз, можно использовать информацию о сканировании, которую получают и запоминают заранее.
Блоки с 311 по 31N управления возбуждением, блок 29 управления приводом барабана и блок 30 управления площадкой необходимы только для учета синхронизации данных изображения с информацией о сканировании для одной операции основного сканирования независимо от размера данных (Q) изображения или информации о сканировании.
На все записывающие головки посылается один и тот же объем данных изображения, и, следовательно, все управляющие устройства для записывающих головок могут быть смонтированы на основе одного и того же технического решения. Записывающие головки включают/выключают только на основе данных изображения, в результате чего упомянутые устройства имеют простые структуры.
Управление площадкой осуществляется на основе информации о сканировании, а данные изображения связывают с информацией о сканировании. Следовательно, если даже предписанная плотность p записи изображения частично изменилась, это не отразится на функционировании блоков 31 управления возбуждением. В частности, легко разработать блок создания данных (Q) изображения отдельно от блоков возбуждения записывающих головок. Также можно выполнить проверку правильности проектных решений и эксплуатационную проверку для блоков создания данных (Q) изображения и информации о сканировании отдельно от проверки аппаратных средств, таких как блоки управления возбуждением. Соответственно, могут быть снижены затраты на разработку.
Этот процесс может быть запрограммирован для выполнения его компьютером.
(Варианты)
В первом варианте осуществления изобретения в области Q запоминания записывающегося изображения обеспечено изображение, большее, чем исходное растровое изображение. Однако можно также обеспечить только данные изображения, соответствующие одной операции сканирования для каждой записывающей головки. При выполнении операции сканирования для записи изображений могут последовательно создаваться и посылаться в буферы с 281 по 28N только те изображения, которые необходимы для соответствующих позиций сканирования.
В первом варианте с левой стороны изображения предусмотрена зона QF точного управления; однако эта зона может также быть предусмотрена с правой стороны. В первом варианте каждое исходное растровое изображение располагают таким образом, чтобы оно было выровнено по левой стороне области данных (Q) изображения, выделенной одной из записывающих головок; однако такое выравнивание можно также обеспечить по правой стороне.
В первом варианте, когда имеются небольшие различия в плотности между левым и правым записывающими лучами соседних областей и зона QF точного управления предусмотрена с левой стороны, изменения в шаге изображений и изменения в плотности изображения появляются одновременно. Соответственно, различия в плотности становятся видимыми. Это происходит потому, что выполняются позиционные регулировки лучей по правой стороне соседней области. Благодаря обеспечению зоны QF точного управления по правой стороне лучи левой стороны выполняют позиционные регулировки и с правой стороны появляются изменения плотности. Соответственно, изменения выполняются постепенно, так что различия в плотности оказываются невидимыми.
Зону QF точного управления можно предусмотреть как на позиции начального сканирования, так и на позиции, где сканирование заканчивается (конечная позиция сканирования).
[Второй вариант]
Растеризованные исходные данные (P) изображения и данные (Q) изображения, аналогичные данным по первому варианту, также можно использовать для приведения в действие подвижной площадки для выполнения спирального сканирования. При спиральном сканировании подвижная площадка постоянно движется с фиксированной скоростью, когда записывается изображение. Таким образом, сканирование выполняется с углом наклона относительно поверхности барабана.
Подвижная площадка перемещается со скоростью, при которой сканируется одна линия сканирования во время одного оборота барабана. Если предположить, что предписанная плотность записи изображения равна p, а скорость вращения барабана равна dv, то скорость xv перемещения подвижной площадки можно определить из следующего уравнения:
xv=(dv/60)·(1/p).
Когда p=1 линия/мм, dv=60 оборотов/секунда, скорость перемещения получается равной xv=1 мм/секунда.
Сканирование выполняется с углом наклона, который образуется при выполнении одной операции сканирования во время одного оборота барабана. Это не вызывает проблем, пока шаг сканирования достаточно мал по сравнению с окружной поверхностью барабана.
[Третий вариант]
Чтобы обеспечить зону с другой плотностью записи, такую как зона QF точного управления, необходимо изменить скорость xv перемещения подвижной площадки. Однако скорость перемещения трудно изменить во время выполнения непрерывного сканирования. Благодаря изменению скорости xv перемещения изменяется угол наклона при сканировании, что вызывает появление видимых полос. Когда линии сканирования делятся в направлении основного сканирования при попытке скорректировать углы наклона и сделать полосы невидимыми, изменяются интервалы между записанными точками в направлении основного сканирования. В результате образуются полосы, отличные от полос, имевших место до коррекции.
Соответственно, в третьем варианте информацию о сканировании используют для перекомпоновки порядка данных записывающегося изображения, с тем чтобы можно было отсканировать изображение, включая зону с другой плотностью записи без изменения скорости xv перемещения подвижной площадки.
В зоне QF точного управления плотность записи повышена. Однако учитывается, что зона QF точного управления включает в себя множество областей, имеющих одинаковые интервалы сканирования с разными стартовыми позициями, которые накладываются друг на друга. Соответственно, плотности записи этих областей равны, так что нет необходимости изменять скорость подвижной площадки.
В данном примере предполагается, что информация о сканировании аналогична первому варианту, где L[1]=1, L[2]=1,25, L[3]=1,5, L[4]=1,75, L[5]=2, L[6]=2,25, L[7]=2,5, L[8]=2,75, L[9]=3, L[10]=3,25, L[11]=3,5, L[12]=3,75, L[13]=4, L[14]=5, L[15]=6,….
Как показано на фиг. 23, информацию о сканировании разбивают на четыре группы сканирования. Первая группа А сканирования включает в себя L[2]=1,25, L[6]=2,25, L[10]=3,25, вторая группа В сканирования включает в себя L[3]=1,5, L[7]=2,5, L[11]=3,5, третья группа С сканирования включает в себя L[4]=1,75, L[8]=2,75, L[12]=3,75, а четвертая группа D сканирования включает в себя L[1]=1, L[5]=2, L[9]=3, L[13]=4, L[14]=5, L[15]=6. Интервалы сканирования между информацией о сканировании равны 1 во всех группах. Единственными отличиями являются стартовые позиции.
Как показано на фиг. 23, каждый раз, когда записывается одна группа сканирования, подвижная площадки перемещается назад к начальной позиции. Затем стартовая позиция записи изображения сдвигается на 1/4 сканирования перед записью следующей группы сканирования.
На основе позиций сканирования, включенных в информацию о сканировании, данные изображения и информация L перекомпоновываются в порядке выполнения сканирования. Таким образом, обеспечивается новый набор информации LN о сканировании в виде LN[1]=L[2]=1,25, LN[2]=L[6]=2,25, LN[4]=L[10]=3,25, LN[5]=L[3]=1,5, LN[6]=L[7]=2,5, LN[7]=L[11]=3,5, LN[8]=L[4]=1,75, LN[9]=L[8]=2,75, LN[10]=L[12]=3,75, LN[11]=L[1]=1, LN[12]=L[5]=2, LN[13]=L[9]=3, LN[14]=L[13]=4, LN[14]=L[14]=5, LN[15]=L[15]=6, …, причем эта информация связана с перекомпонованными данными изображения. При спиральном сканировании при выравнивании позиций сканирования на теле для записи подвижная площадка синхронизируется с угловым положением барабана, так что можно воспроизвести позиции сканирования. Устройство записи изображения последовательно перемещает подвижную площадку в соответствии с информацией LN о сканировании. Устройство записи изображения считывает один за другим каждый элемент информации о сканировании. Когда устройство записи изображения обнаруживает, что позиция сканирования, указанная в информации о сканировании, находится перед предыдущей позицией, устройство записи изображения временно прекращает операцию записи изображения и перемещает подвижную площадку назад на опорную позицию, например, исходную позицию. Устройство записи изображения перемещает подвижную площадку к стартовой позиции сканирования с постоянной скоростью и регулирует временные соотношения в соответствии с сигналом поворота барабана, так что подвижная площадка выравнивается с дробной позицией для следующей позиции сканирования. Затем сканирование вновь запускается. Когда подвижная площадка достигает позиции сканирования, приостановленная операция записи изображения начинается снова.
Может быть предусмотрено множество опорных позиций. Подвижная площадка должна перемещаться назад к ближайшей опорной позиции, с которой может быть возобновлено сканирование. Благодаря обеспечению опорной позиции на стороне сканирования до конечной позиции записи изображения на подходящем расстоянии, на котором подвижная площадка может перемещаться со стабильной скоростью, можно уменьшить это расстояние по сравнению с расстоянием, проходимым при возвращении на исходную позицию. Соответственно, можно сократить время, необходимое для формирования изображения.
Сканирование может выполняться несколько раз, когда подвижная площадка движется назад. Поскольку интервалы сканирования одинаковы, скорость подвижной площадки не меняется. Соответственно, не меняется угол наклона при сканировании, так что специальная коррекция не потребуется. Пример траектории сканирования одного записывающего луча показан на фиг. 24.
Этот способ применим не только для спирального сканирования, но также для других режимов сканирования, таких как пошаговое сканирование. Так как интервалы сканирования могут быть сделаны одинаковыми, требуемая энергия, рабочая нагрузка и сопротивление механическому перемещению из-за трения остаются стабильными при перемещении подвижной площадки. Соответственно, могут быть уменьшены ошибки в позициях движущейся площадки, так что ухудшение качества изображения оказывается меньшим по сравнению со случаем изменения скорости сканирования.
[Четвертый вариант]
В четвертом варианте предполагается, что возникает отказ m-й записывающей головке по первому варианту, и m-я записывающая головка не может излучать записывающий луч.
В этом случае m-я записывающая головка не записывает изображение из области p запоминания исходного растрового изображения, а вместо этого изображение записывается записывающей головкой, смежной по отношению к m-й записывающей головке.
В частности, информация Dx[m] о m-м позиционном смещении и информация Dx[m-1] о (m-1)-м позиционном смещении для получения нового Dx[m] и нового Dx[m-1] изменяется следующим образом:
новое Dx[m]=-w, новое Dx[m-1]=старое Dx[m-1]+w+старое Dx[m].
Область записи m-й записывающей головки добавляется к области записи (m-1)-й записывающей головки, так что область записи m-й записывающей головки становится нулевой. На основе новой информации о позиционном смещении реализуются такие же процессы, как в первом и втором вариантах.
Соответственно, (m-1)-я записывающая головка может сформировать изображение, которое предполагалось для записи m-й записывающей головкой. Формирование изображения может быть выполнено без использования отказавшей m-й записывающей головки.
Кроме того, эту технологию можно использовать в качестве способа записи, позволяющего избежать формирования ухудшенного изображения при появлении отказа в записывающей головке.
Аналогичным образом, если отказы появляются в m-й и (m+1)-й записывающих головках, область записи (m-1)-й записывающей головки можно использовать для записи изображений отказавших записывающих головок. Однако невозможно выйти за пределы области, в которой может перемещаться подвижная площадка.
Чтобы обеспечить возможность продолжения формирования изображения при появлении отказа, подвижная площадка способна перемещаться в области, в два раза превышающей предписанную ширину w записи.
[Пятый вариант]
Трудно полностью согласовать плотности для соседних записывающих головок. Если различие в плотности велико, то появляются видимые полосы. Путем минимизации различия в плотности полосы можно сделать менее видимыми.
Соответственно, в пятом варианте согласно настоящему изобретению данные изображения, соответствующие одной записывающей головке, накладываются на данные изображения, соответствующие соседней записывающей головке, на участке данных изображения, где плотность сканирования высока. Кроме того, создают растеризованные данные (Q) изображения, так что записывающий луч одной записывающей головки и записывающий луч соседней записывающей головки излучаются попеременно для формирования изображения.
Один пример показан на фиг. 25. Последней позицией сканирования, на которой записывающая головка m записывает исходное растровое изображение, является позиция Zm. Зона от позиции Zm сканирования до позиции Zm-4 сканирования записывающей головки m соответствует граничному участку (зона QF точного управления), смежному с другой областью в исходном растровом изображении, как было описано в первом варианте. На фиг. 25 добавлены три линии сканирования, сканируемые записывающим лучом m, а именно (Zm-1, Zm-2, Zm-3).
Кроме того, в области Q запоминания записывающегося изображения, показанной на фиг. 25, предполагается, что добавлены три базовые ширины Nw, и на граничных участках накладываются четыре линии сканирования. В каждой из зон QF точного управления (Zm, Zm-1, Zm-2, Zm-3) добавлены три линии сканирования.
Данные, указывающие, что операции записи не выполняются, связаны с позициями Zm-3, Zm-1 сканирования записывающего луча m.
Информацию о сканировании для записывающего луча m+1 определяют таким же образом, как в первом варианте; в этом примере данные, указывающие, что операции записи не выполняются, связаны с позициями сканирования, отличными от 1,25, 3,25, 5,25 и так далее.
Исходное растровое изображение записывается попеременно на позиции Zm-4 сканирования записывающего луча m и позиции 5,25 сканирования записывающего луча m+1; позиции Zm-2 сканирования записывающего луча m и позиции 6,25 сканирования записывающего луча m+1; и позиции Zm сканирования записывающего луча m и позиции 7,25 сканирования записывающего луча m+1.
Соответственно, можно уменьшить несоответствующие участки между позициями записи изображения соседних записывающих лучей, и большие различия в плотности можно минимизировать.
(Варианты)
В вышеприведенном описании записывающий луч m связан со стандартным сканированием, а записывающий луч m+1 связан с дополнительным сканированием. Однако записывающие лучи при выполнении попеременной записи могут быть связаны любым образом.
Кроме того, в приведенном выше описании данные (Q) изображения разбиваются на несколько областей, соответствующих количеству записывающих головок; однако настоящее изобретение этим не ограничивается.
Настоящее изобретение не ограничивается подробно раскрытым здесь вариантом, и возможны его модификации и расширения, не выходящие за рамки объема настоящего изобретения.
Настоящая заявка основана на приоритетной патентной заявке Японии № 2005-345872, поданной 30 ноября 2005 года, содержание которой целиком включено в описании в качестве ссылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2005 |
|
RU2304808C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2008 |
|
RU2373063C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ, СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ И ЗАПОМИНАЮЩИЙ НОСИТЕЛЬ | 2015 |
|
RU2645429C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2009 |
|
RU2421815C1 |
| СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2417438C2 |
| СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2325697C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2372635C2 |
| УСТРОЙСТВО ОПТИЧЕСКОГО СКАНИРОВАНИЯ И УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, ИСПОЛЬЗУЮЩЕЕ ТАКОЙ АНАЛИЗАТОР | 2008 |
|
RU2392648C1 |
| УСТРОЙСТВО ЗАПИСИ (ВАРИАНТЫ) | 2008 |
|
RU2373065C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ (ВАРИАНТЫ) | 2007 |
|
RU2378675C2 |
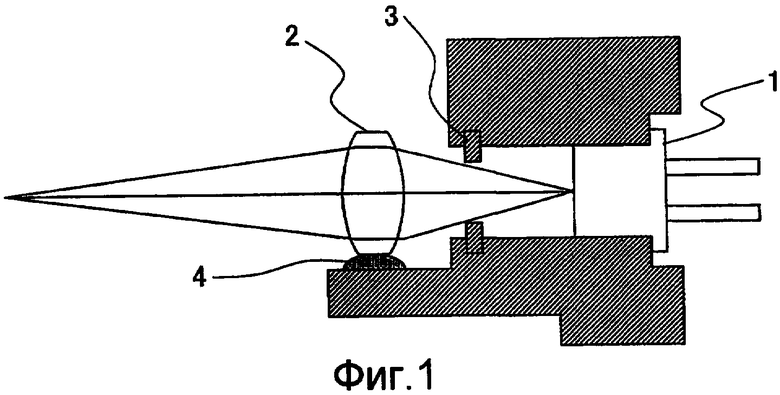
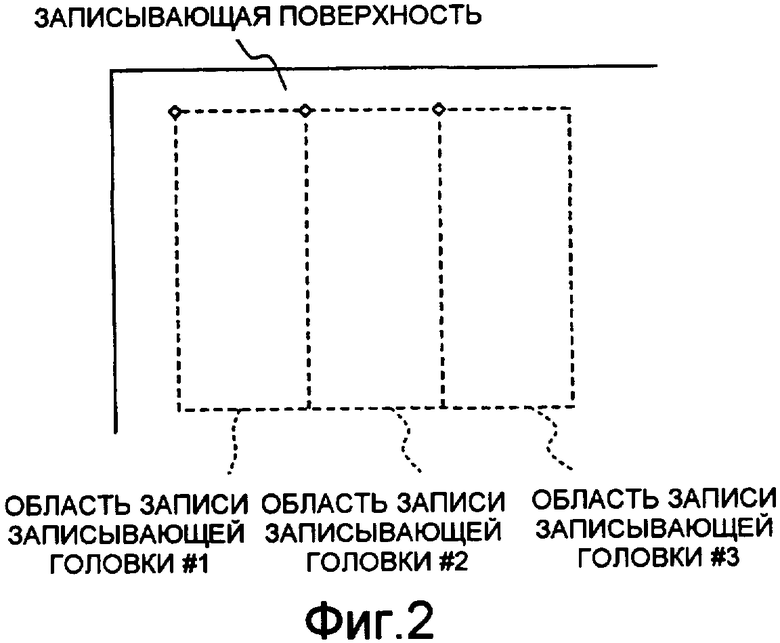
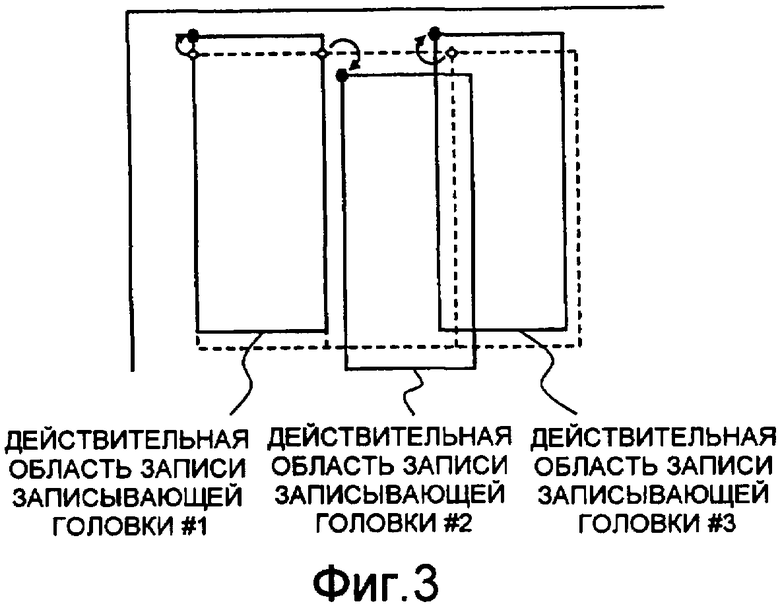
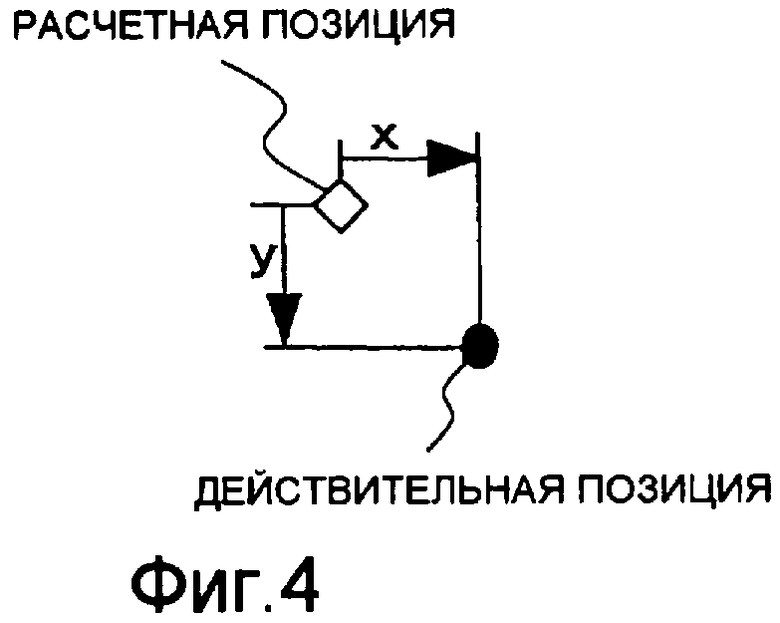
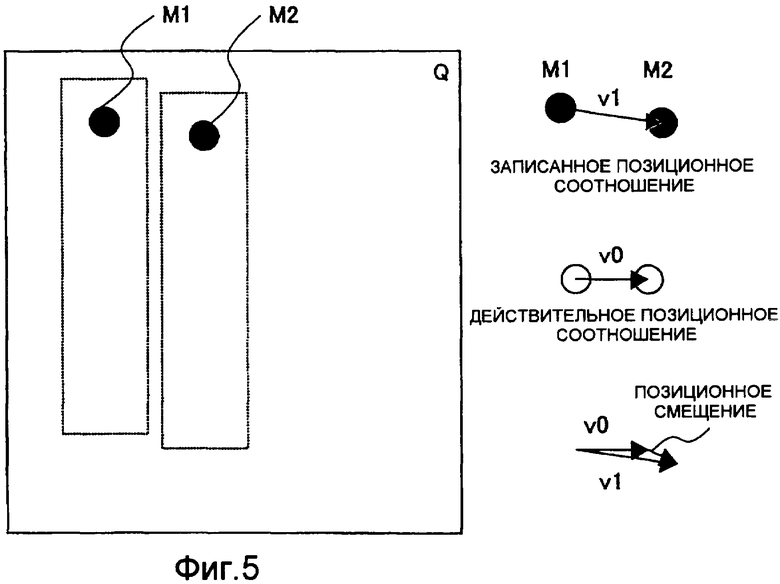
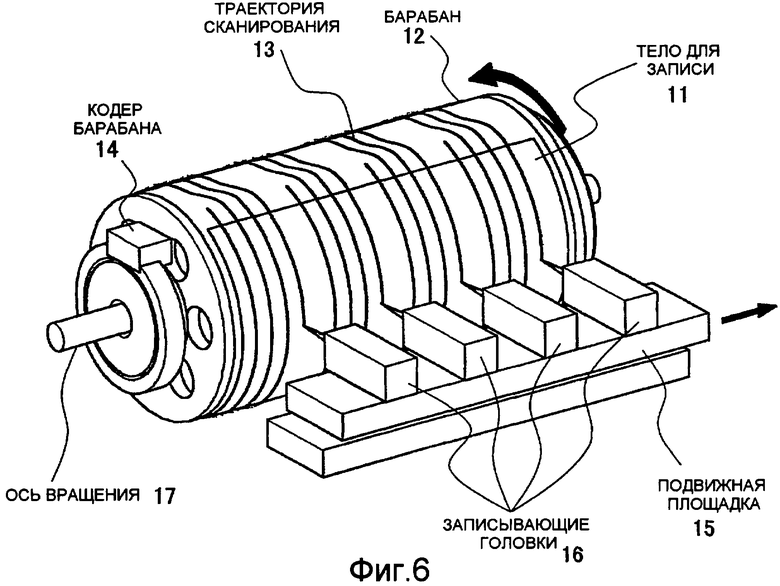
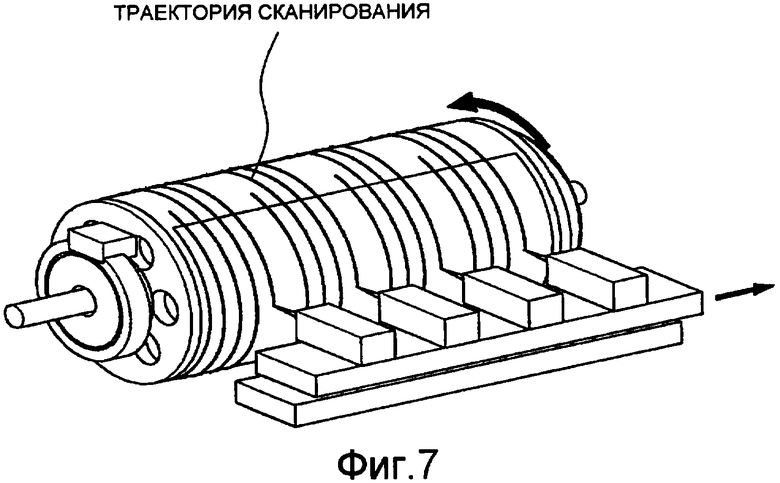
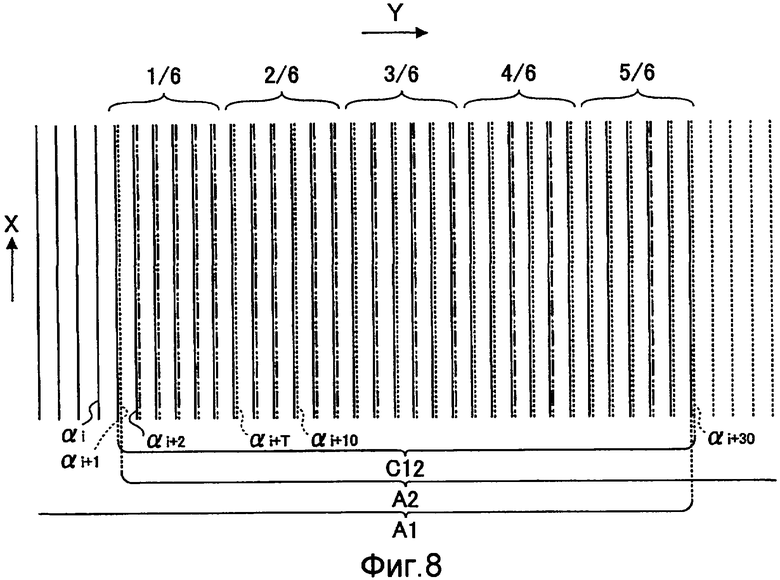
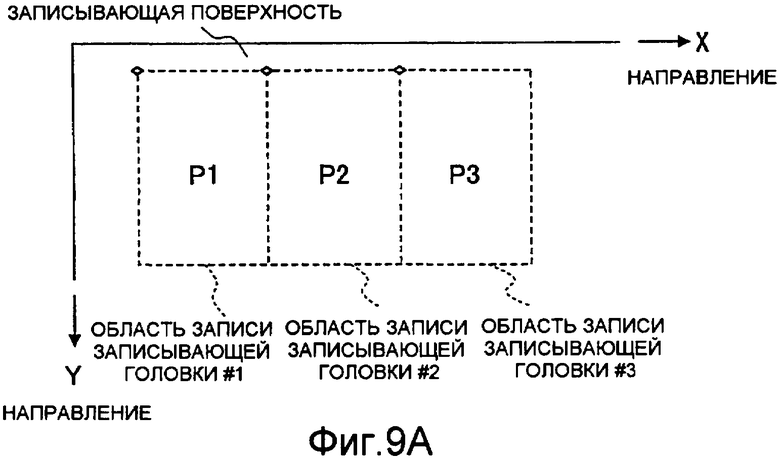
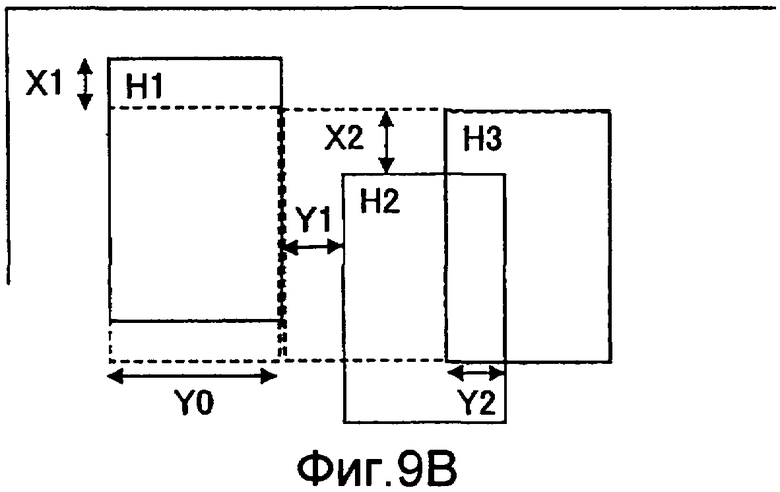
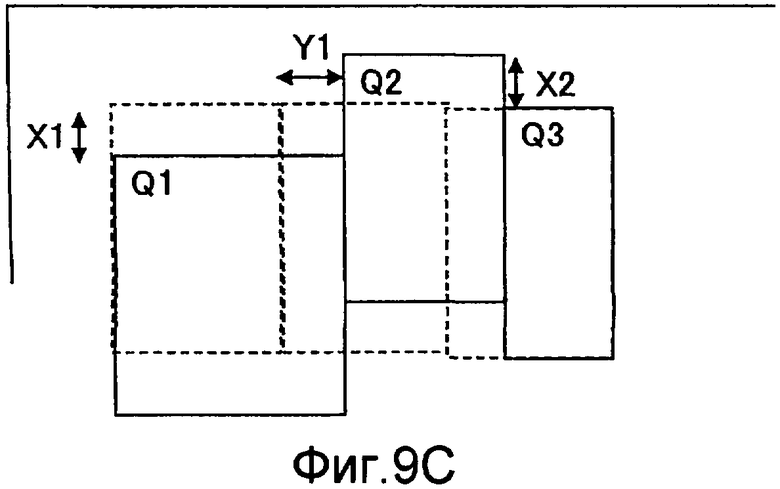
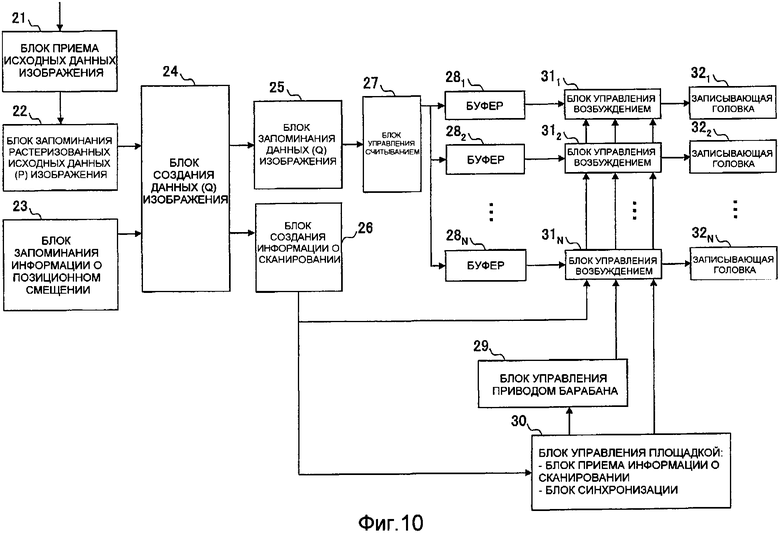
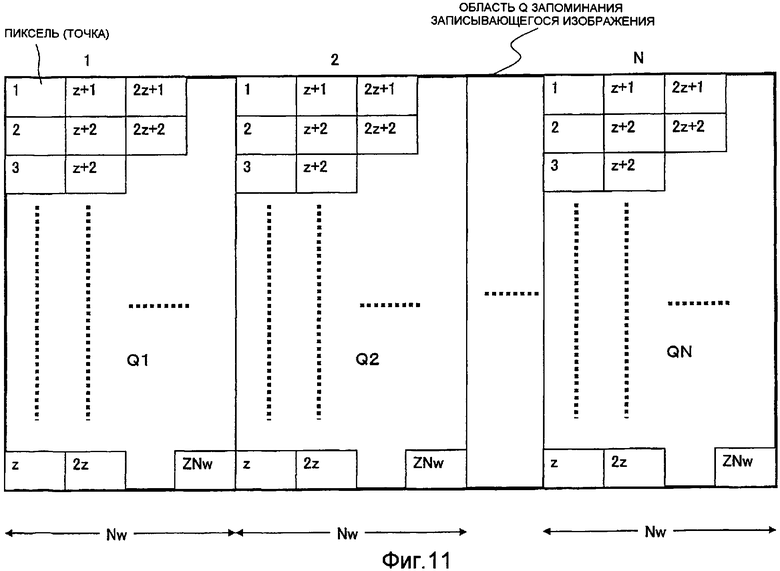
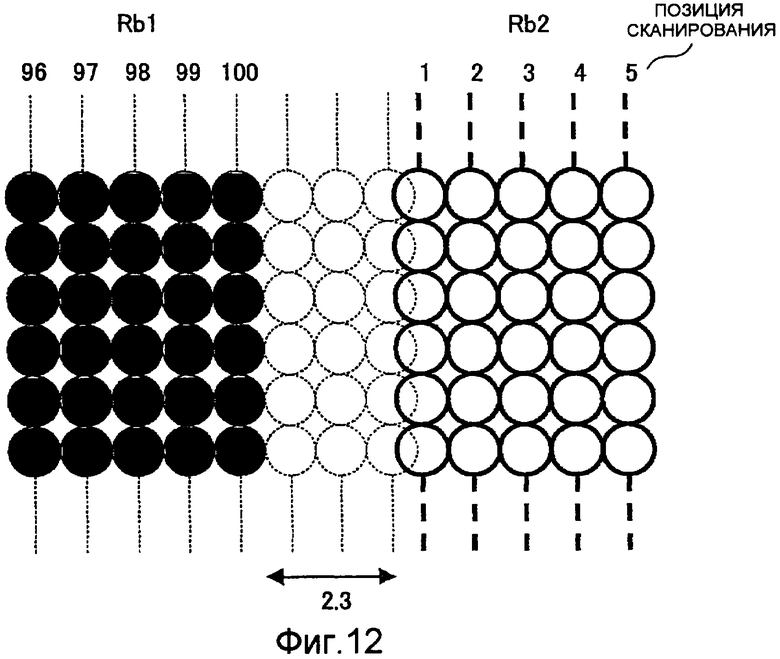
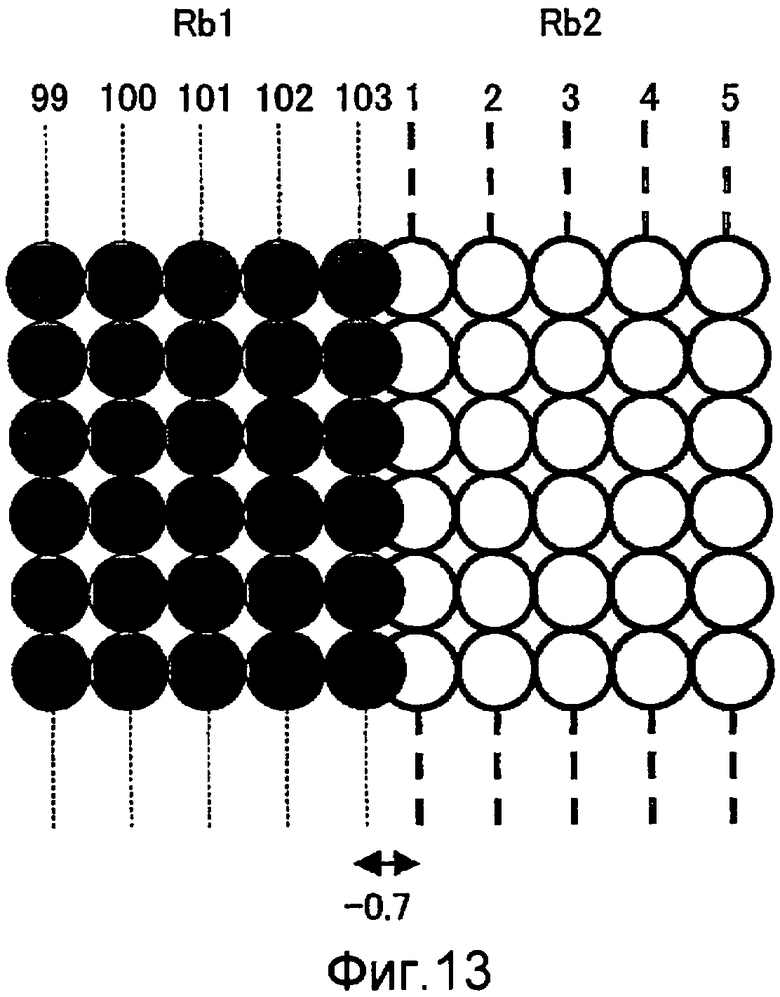
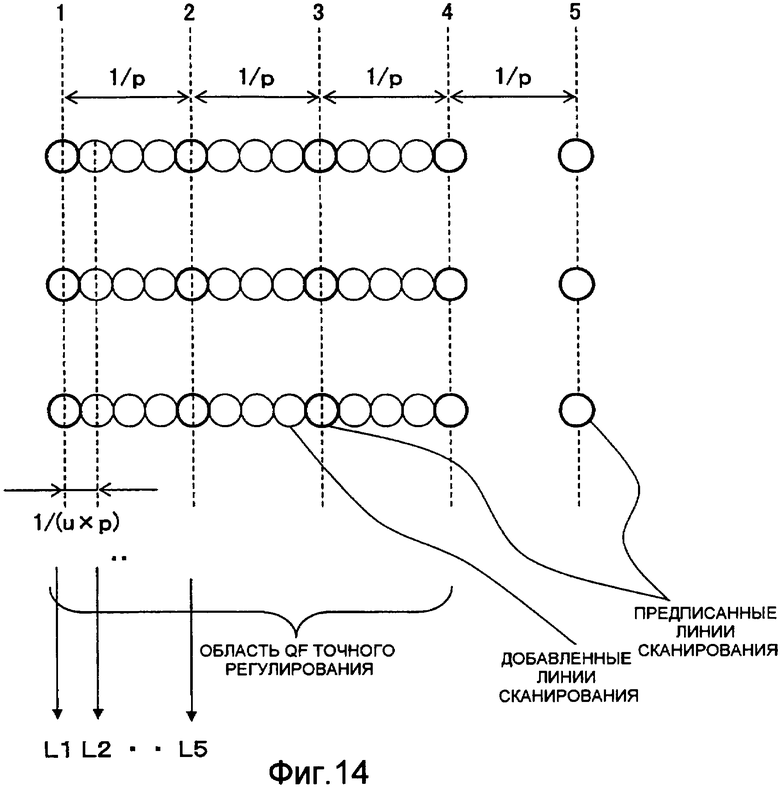
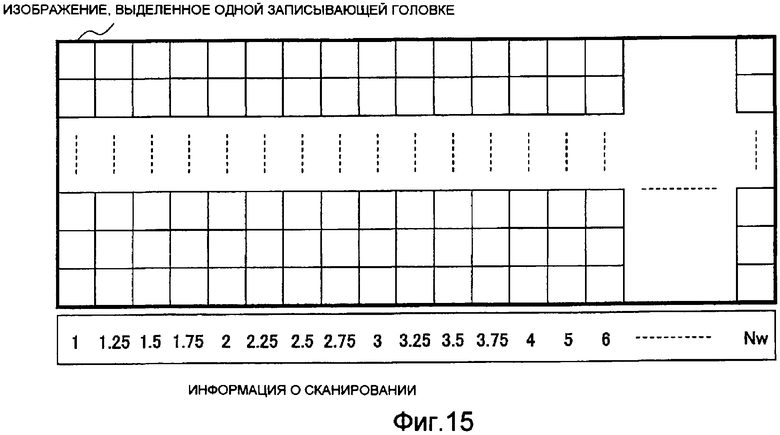
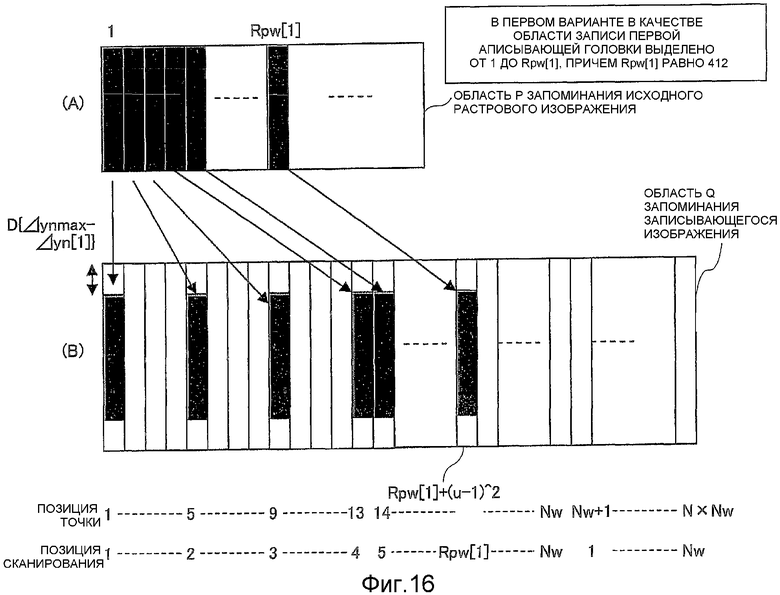
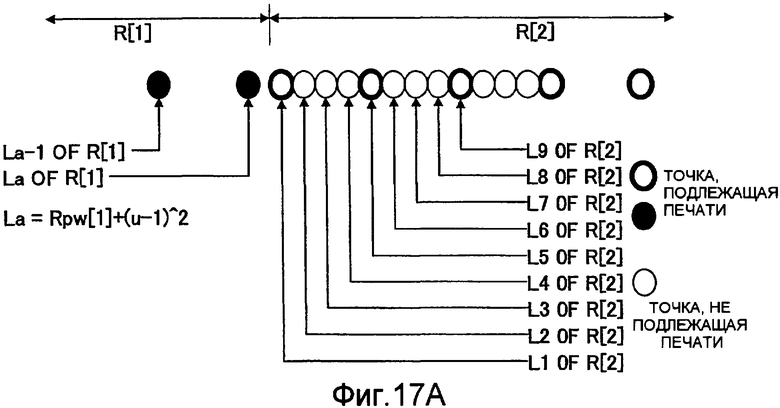
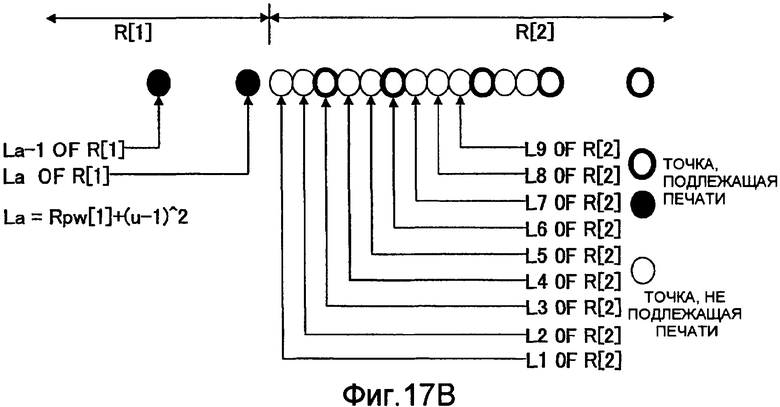
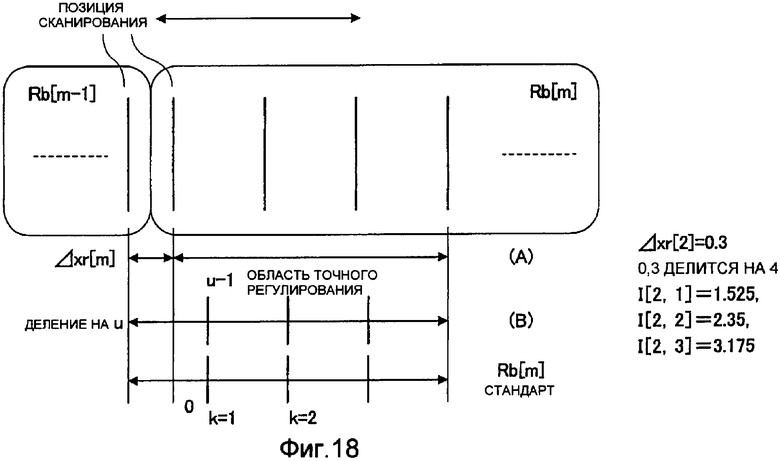
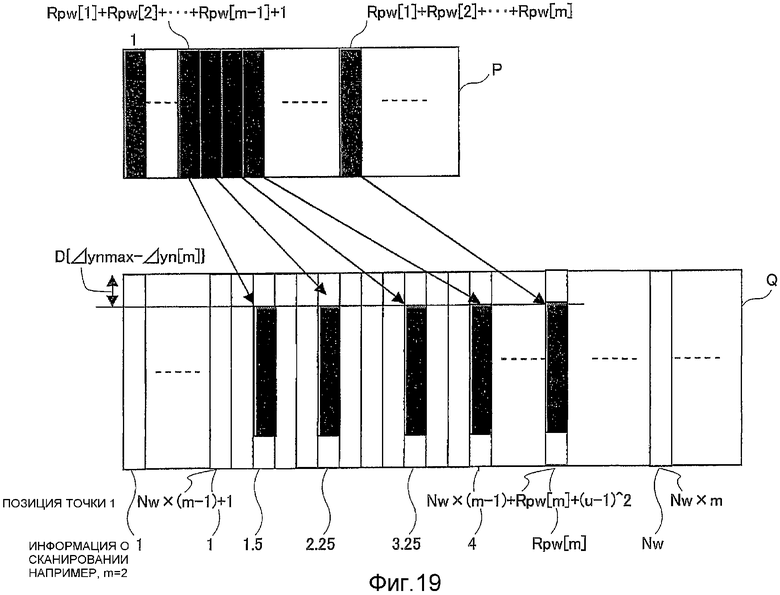
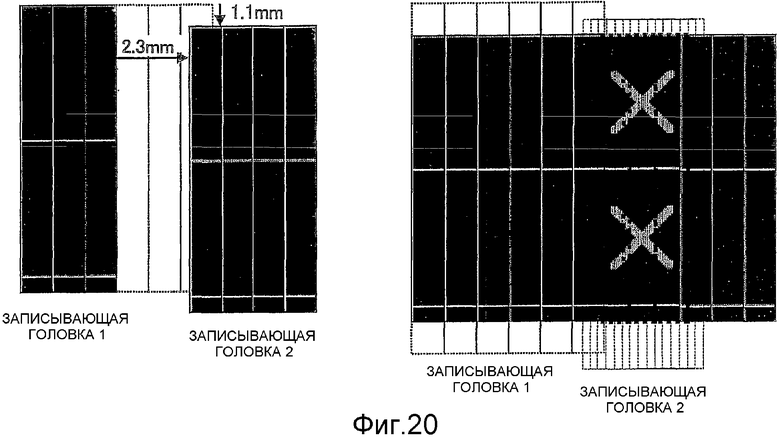
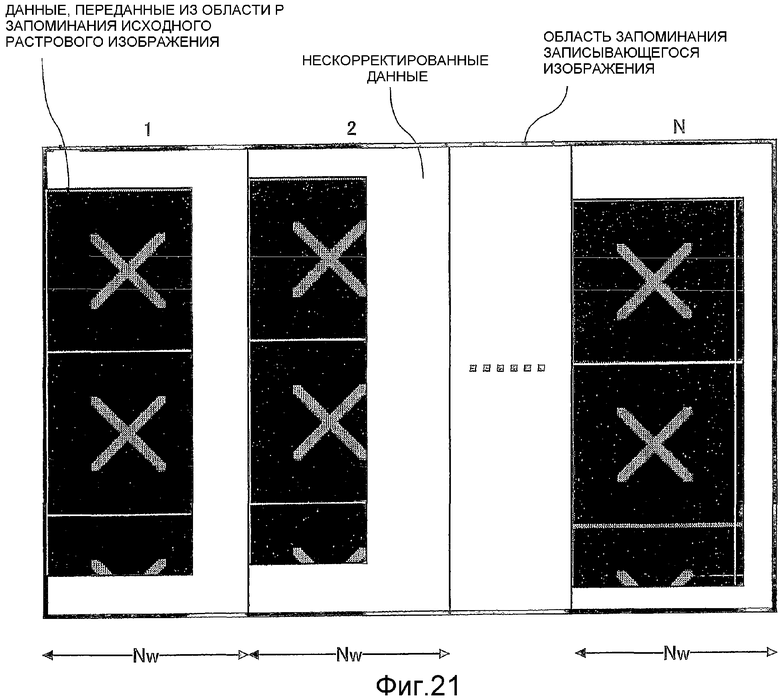
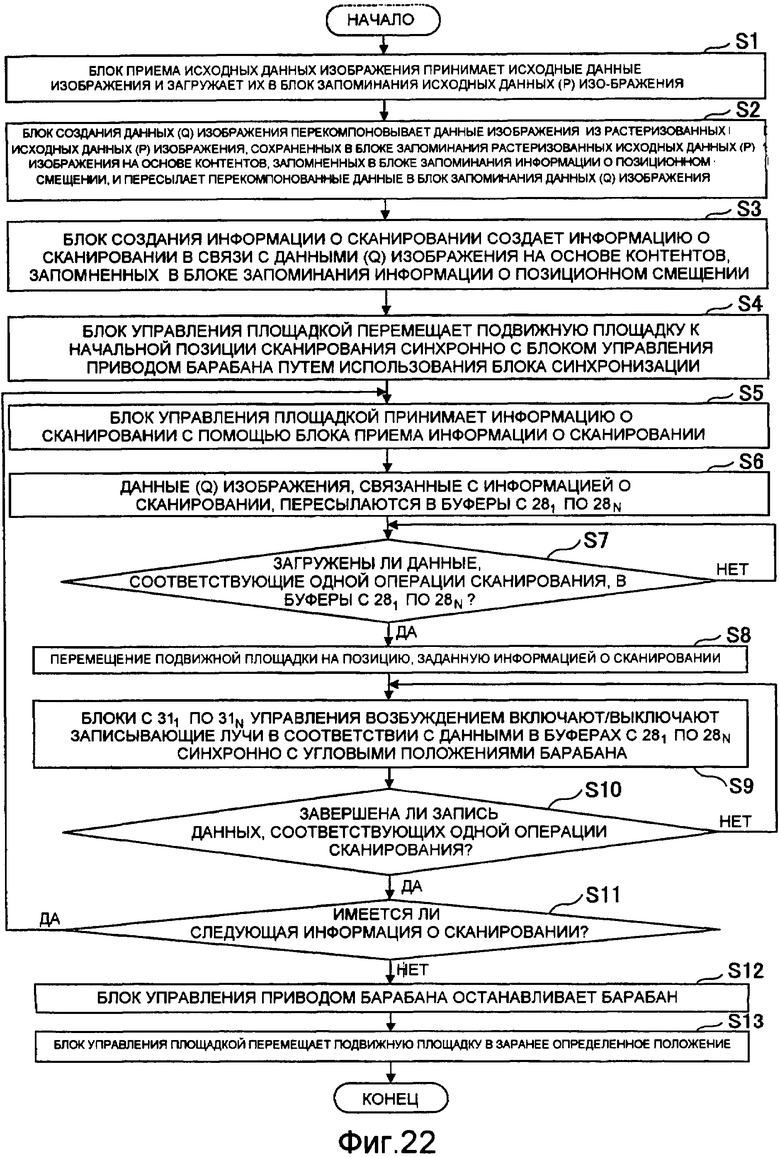
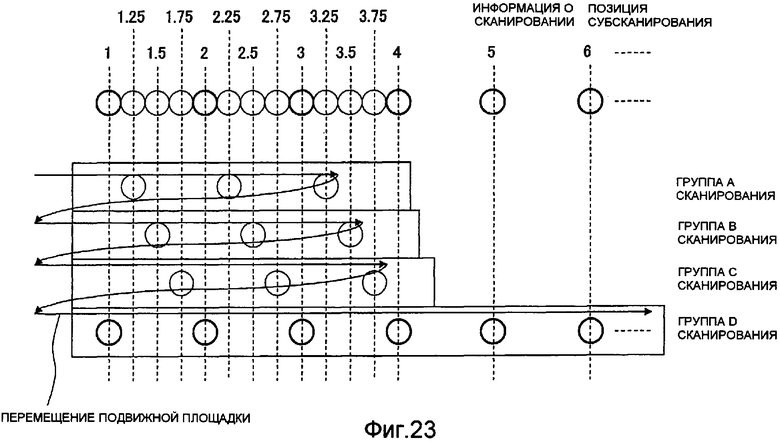
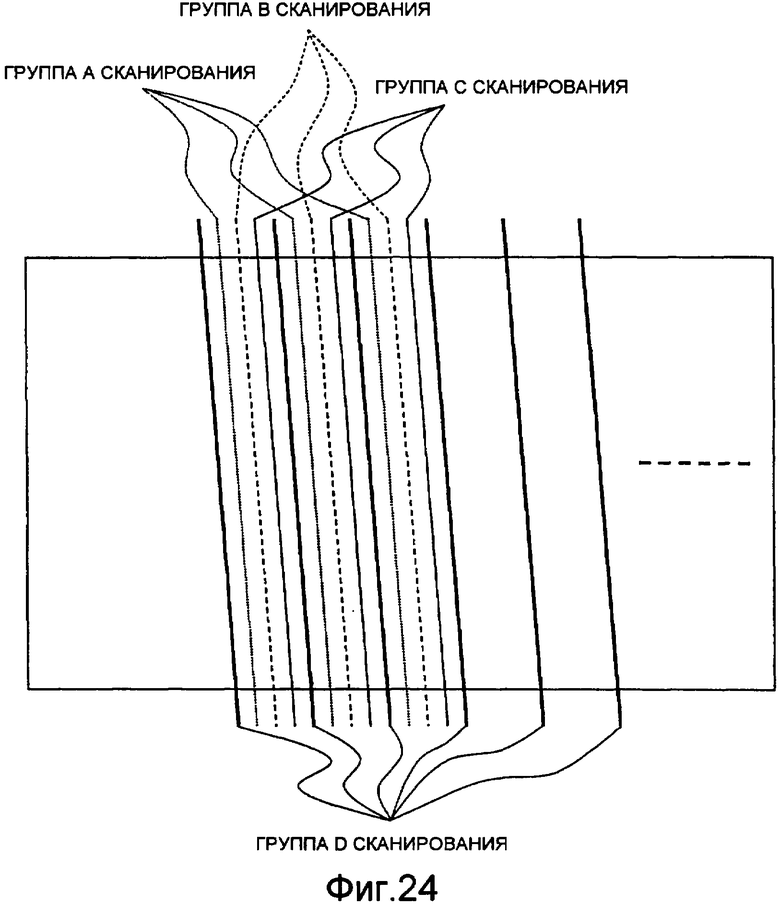
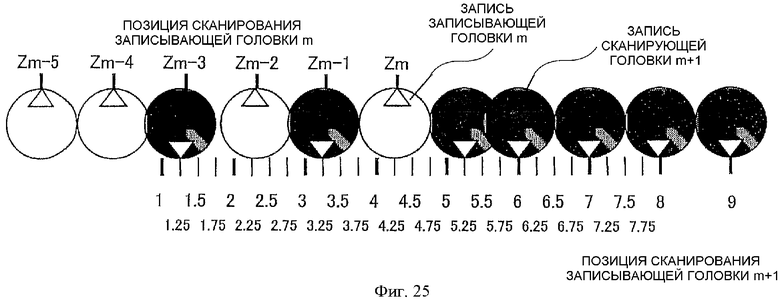
Изобретение относится к устройствам и способам формирования изображения. Устройство формирования изображения содержит блок запоминания информации о позиционном смещении, блок запоминания растеризованных исходных данных изображения, блок создания скорректированных данных изображения, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения, сохраненных в блоке запоминания растеризованных исходных данных изображения, на основе информации о позиционном смещении, так что позиционные смещения корректируются в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей и блок формирования информации о сканировании, сконфигурированный для формирования информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей, чтобы сканировать тело для записи для записи скорректированных данных изображения. Изобретение позволяет производить запись высококачественных изображений с высокой скоростью. 4 н. и 10 з.п. ф-лы, 25 ил.
1. Устройство формирования изображения для формирования изображения, соответствующего растеризованным исходным данным изображения, путем разбиения растеризованных исходных данных изображения на области в соответствии с N, при этом N является целым числом, большим или равным 2 записывающими головками, и сканирования единого тела для записи путем одновременного излучения записывающих лучей от N записывающих головок, причем устройство формирования изображения содержит:
блок запоминания информации о позиционном смещении, сконфигурированный для сохранения информации о позиционном смещении, включающей в себя позиционные смещения записывающих лучей записывающих головок;
блок запоминания растеризованных исходных данных изображения, сконфигурированный для сохранения растеризованных исходных данных изображения;
блок создания скорректированных данных изображения, сконфигурированный для создания скорректированных данных изображения, разбитых на области в соответствии с записывающими головками, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения, сохраненных в блоке запоминания растеризованных исходных данных изображения, на основе информации о позиционном смещении, так что позиционные смещения корректируются в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей; и
блок формирования информации о сканировании, сконфигурированный для формирования информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей, чтобы сканировать тело для записи для записи скорректированных данных изображения.
2. Устройство формирования изображения по п.1, в котором:
блок формирования информации о сканировании формирует информацию о сканировании, с тем чтобы обеспечить зону высокой плотности вблизи начальной позиции сканирования или конечной позиции сканирования, где плотность сканирования в зоне высокой плотности выше, чем в других отсканированных зонах,
блок создания скорректированных данных изображения создает скорректированные данные изображения, соответствующие информации о сканировании, созданной блоком создания информации о сканировании.
3. Устройство формирования изображения по п.2, в котором:
блок создания скорректированных данных изображения создает скорректированные данные изображения, так что одна из областей скорректированных данных изображения, соответствующих одной из записывающих головок, и другая из областей скорректированных данных изображения, соответствующих другой из записывающих головок, смежной по отношению к указанной одной из записывающих головок, накладываются друг на друга в зоне высокой плотности по меньшей мере одной из областей скорректированных данных изображения.
4. Устройство формирования изображения по п.3, в котором:
блок формирования информации о сканировании создает информацию о сканировании, так что интервалы сканирования по существу являются равномерными в зоне высокой плотности в скорректированных данных изображения, и
блок создания скорректированных данных изображения создает скорректированные данные изображения, соответствующие информации о сканировании, сформированной блоком формирования информации о сканировании.
5. Устройство формирования изображения по п.1, в котором:
блок формирования информации о сканировании создает информацию о сканировании, с тем чтобы обеспечить зону высокой плотности вблизи начальной позиции сканирования или конечной позиции сканирования, где плотность сканирования в зоне высокой плотности выше, чем в других отсканированных зонах, и
блок создания скорректированных данных изображения создает скорректированные данные изображения, так что
одна из областей скорректированных данных изображения, соответствующих одной из записывающих головок, и другая из областей скорректированных данных изображения, соответствующих другой из записывающих головок, смежной по отношению к указанной одной из записывающих головок, накладываются друг на друга в зоне высокой плотности скорректированных данных изображения, и
один из записывающих лучей от одной из записывающих головок и другой из записывающих лучей от указанной другой из записывающих головок излучаются попеременно.
6. Устройство формирования изображения по п.1, в котором:
блок создания скорректированных данных изображения создает скорректированные данные изображения, так что, когда одна из записывающих головок отказывает, другая одна из записывающих головок, смежная по отношению к отказавшей записывающей головке, излучает записывающий луч вместо отказавшей записывающей головки.
7. Устройство формирования изображения для формирования изображения, соответствующего растеризованным исходным данным изображения, путем разбиения растеризованных исходных данных изображения на области в соответствии с N, где N является целым числом, большим или равным 2, записывающими головками, и сканирования единого тела для записи путем одновременного излучения записывающих лучей от N записывающих головок, причем устройство формирования изображения содержит:
блок запоминания информации о позиционном смещении, сконфигурированный для сохранения информации о позиционном смещении, включающей в себя позиционные смещения записывающих лучей записывающих головок;
блок запоминания растеризованных исходных данных изображения, сконфигурированный для сохранения растеризованных исходных данных изображения;
блок создания скорректированных данных изображения, сконфигурированный для создания скорректированных данных изображения, разбитых на области в соответствии с записывающими головками, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения, сохраненных в блоке запоминания растеризованных исходных данных изображения, на основе информации о позиционном смещении, так что позиционные смещения корректируются в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей; и
блок формирования информации о сканировании, сконфигурированный для формирования информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей для сканирования тела для записи для записи скорректированных данных изображения, где
блок формирования информации о сканировании формирует информацию о сканировании, с тем чтобы обеспечить зону высокой плотности вблизи начальной позиции сканирования или конечной позиции сканирования, где
плотность сканирования в зоне высокой плотности выше, чем в других отсканированных зонах,
дополнительные операции сканирования, выполняемые для зоны высокой плотности, выделяют и группируют вместе согласно предварительно определенным интервалам, и
операции субсканирования выполняют для каждой группы между выполнением операций основного сканирования, причем операции субсканирования выполняют для групп по существу с одинаковыми скоростями.
8. Способ формирования изображения для формирования изображения, соответствующего растеризованным исходным данным изображения путем разбиения растеризованных исходных данных изображения на области в соответствии с N, где N является целым числом, большим или равным 2, записывающими головками, и сканирования единого тела для записи путем одновременного излучения записывающих лучей от N записывающих головок, причем способ формирования изображения содержит:
(a) создание скорректированных данных изображения, разбитых на области в соответствии с записывающими головками, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения на основе ранее запомненной информации о позиционном смещении, включающей в себя позиционные смещения записывающих лучей записывающих головок, так что позиционные смещения корректируют в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей; и
(b) формирование информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей, чтобы сканировать тело для записи для записи скорректированных данных изображения.
9. Способ формирования изображения по п.8, в котором:
этап (b) включает в себя формирование информацию о сканировании, с тем чтобы обеспечить зону высокой плотности вблизи начальной позиции сканирования или конечной позиции сканирования, где плотность сканирования в зоне высокой плотности выше, чем в других отсканированных зонах, и
этап (а) включает в себя создание скорректированных данных изображения, соответствующих информации о сканировании, сформированной на этапе (b).
10. Способ формирования изображения по п.9, в котором:
этап (а) включает в себя создание скорректированных данных изображения, так что одна из областей скорректированных данных изображения, соответствующих одной из записывающих головок, и другая одна из областей скорректированных данных изображения, соответствующих другой из записывающих головок, смежной по отношению к указанной одной из записывающих головок, накладываются друг на друга в зоне высокой плотности по меньшей мере одной из областей скорректированных данных изображения.
11. Способ формирования изображения по п.10, в котором:
этап (b) включает в себя формирование информации о сканировании, так что интервалы сканирования по существу являются равномерными в зоне высокой плотности в скорректированных данных изображения, и
этап (а) включает в себя создание скорректированных данных изображения, соответствующих информации о сканировании, сформированной на этапе (b).
12. Способ формирования изображения по п.8, в котором:
этап (b) включает в себя формирование информации о сканировании, так чтобы обеспечить зону высокой плотности вблизи начальной позиции сканирования или конечной позиции сканирования, где плотность сканирования в зоне высокой плотности выше, чем в других отсканированных зонах, и
этап (а) включает в себя создание скорректированных данных изображения, так что
одна из областей скорректированных данных изображения, соответствующих одной из записывающих головок, и другая из областей скорректированных данных изображения, соответствующих другой из записывающих головок, смежной по отношению к указанной одной из записывающих головок, накладываются друг на друга в зоне высокой плотности скорректированных данных изображения, и
один из записывающих лучей от одной из записывающих головок и другой из записывающих лучей от указанной другой из записывающих головок излучаются попеременно.
13. Способ формирования изображения по п.8, в котором:
этап (а) включает в себя создание скорректированных данных изображения, так что, когда одна из записывающих головок отказывает, другая из записывающих головок, смежная по отношению к отказавшей записывающей головке, излучает записывающий луч вместо отказавшей записывающей головки.
14. Способ формирования изображения для формирования изображения, соответствующего растеризованным исходным данным изображения, путем разбиения растеризованных исходных данных изображения на области в соответствии с N, где N является целым числом, большим или равным 2, записывающими головками, и сканирования единого тела для записи путем одновременного излучения записывающих лучей от N записывающих головок, причем способ формирования изображения содержит:
(а) создание скорректированных данных изображения, разбитых на области в соответствии с записывающими головками, причем скорректированные данные изображения получают путем изменения растеризованных исходных данных изображения, на основе предварительно запомненной информации о позиционном смещении, включающей в себя позиционные смещения записывающих лучей записывающих головок, так что позиционные смещения корректируются в направлении основного сканирования и направлении субсканирования при излучении записывающих лучей; и
(b) формирование информации о сканировании на основе информации о позиционном смещении, причем информация о сканировании включает в себя позиции и порядки для записывающих лучей, чтобы сканировать тело для записи для записи скорректированных данных изображения, где
этап (b) включает в себя формирование информации о сканировании, так чтобы обеспечить зону высокой плотности вблизи начальной позиции сканирования или конечной позиции сканирования, где
плотность сканирования в зоне высокой плотности выше, чем в других отсканированных зонах,
дополнительные операции сканирования, выполняемые для зоны высокой плотности, выделяют и группируют вместе согласно предварительно определенным интервалам, и
операции субсканирования выполняют для каждой группы между выполнением операций основного сканирования, причем операции субсканирования выполняют для групп по существу с одинаковыми скоростями.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2000 |
|
RU2171499C1 |

