Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству обработки изображений для преобразования данных движущегося изображения, имеющего первую частоту кадров, в данные движущегося изображения, имеющего более высокую частоту кадров, и к способу управления этим устройством.
Описание предшествующего уровня техники
Традиционно синонимом устройства отображения движущегося изображения, например для телевидения, была электронно-лучевая трубка (CRT). Однако в последние годы в практику использования вошли так называемые дисплеи на жидких кристаллах, плазменные дисплеи и дисплеи с автоэлектронной эмиссией (FED). То есть на сегодня существуют дисплеи различных типов.
Дисплеи этих типов применяют различные способы отображения. Например, устройства отображения, основанные на устройстве на жидких кристаллах (например, жидкокристаллический дисплей прямого видения, жидкокристаллический рирпроектор и жидкокристаллический фронтпроектор) используют многочисленные способы развертки. В любом случае, период вывода света в каждой части пиксела занимает большую часть периода отображения одного кадра. По этой причине такое устройство отображения называется устройством отображения удерживающего типа.
С другой стороны, например, в CRT или FED свет выводится в каждой части пиксела один раз в кадре. Время излучения света намного короче, чем период отображения кадра, и обычно составляет 2 мс или меньше. По этой причине такое устройство отображения называется устройством отображения импульсного типа.
Существуют также так называемый плазменный дисплей и дисплей с последовательной подсветкой цветовых полей, являющиеся типами устройств отображения, отличными от описанных выше классов.
Способы отображения соответствующих типов обладают следующими особенностями.
(1) Устройство отображения удерживающего типа
Устройство отображения этого типа излучает свет в течение большой части периода кадра. Следовательно, временный разбаланс силы света мал и мерцание наблюдается редко. Дополнительно прослеживание (то есть сопровождение глазами движущейся части движущегося изображения) делает размытость при движении относительно большой в соответствии с длительностью периода излучения света в кадре. "Размытость при движении" здесь отличается от той, которая вызывается динамической характеристикой устройства отображения.
(2) Устройство отображения импульсного типа
Устройство отображения этого типа излучает свет очень короткое время в течение периода кадра. Следовательно, временный разбаланс силы света большой и наблюдается мерцание, синхронное с кадром. Однако размытость при движении наблюдается редко. Поэтому возможно получить разрешающую способность, почти равную той, которая существует для неподвижного кадра.
В целом, период излучения света устройства отображения изменяется в зависимости от способа отображения и устройства отображения. Описанные выше типы (1) и (2) диаметрально противоположны с точки зрения периода излучения света. Чем больше период излучения света (соответствующий времени удержания) в каждом способе, тем больше размытость при движении при прослеживании. Чем короче период излучения света, тем меньше размытость при движении. То есть период излучения света и величина размытости при движении почти пропорциональны друг другу. С другой стороны, что касается мерцания, синхронного с кадром, чем дольше период излучения света, тем меньше наблюдаемое мерцание. Чем короче период излучения света, тем больше наблюдаемое мерцание. То есть период излучения света и мерцание являются взаимозависимыми.
Решением этих двух проблем является умножение частоты кадров на N. Во многих случаях N=2. То есть частота удваивается. Когда частота кадров удвоена, период излучения света в каждом кадре с удвоенной частотой поделен на два. Это также почти надвое делит размытость при движении. Также, что касается мерцания, если начальная частота кадров 60 Гц удваивается до 120 Гц, частота мерцания выходит за пределы динамической характеристики человеческого глаза. Следовательно, никакое мерцание не наблюдается.
Как описано выше, удвоение частоты кадров (говоря в более общем плане, умножение частоты кадров на N) обладает большой эффективностью, но выдвигает новую проблему.
Например, когда частота кадров первоначального сигнала изображения равна 60 Гц, видеоинформация обновляется каждую 1/60 секунды. Если частота кадров удваивается до отображения данных изображения с частотой 120 Гц, необходимая видеоинформация пропускается каждый второй кадр. Как мера борьбы с этим, если частота кадров удвоена, идентичные изображения отображаются, например, дважды. Это решает проблему мерцания, но не может улучшить размывание при движении в первоначальном изображении. В устройстве отображения импульсного типа удвоенные изображения наблюдаются при прослеживании (это явление в дальнейшем будет упоминаться как "двойное размывание").
Чтобы уменьшить размывание при движении или двойное размывание и предотвратить мерцание, используются, главным образом, два способа удвоения частоты кадров.
При первом способе обнаруживается движение объекта в первоначальном изображении и оцениваются изображения между двумя кадрами. Это обычно называется способом формирования промежуточного изображения путем компенсации движения. В этом первом способе ошибка оценки происходит при определенном условии. Кроме того, объем требуемых вычислений чрезвычайно велик.
При втором способе для каждого кадра входящего изображения сначала выполняется процесс фильтрации, чтобы разделить пространственную высокочастотную составляющую, строго связанную с размыванием при движении, и пространственную низкочастотную составляющую, строго связанную с мерцанием. Пространственная высокочастотная составляющая сосредоточена в одном субкадре (один из двух кадров с удвоенной частотой, соответствующих первоначальному кадру). Пространственная низкочастотная составляющая распределяется по обоим субкадрам (оба из двух кадров с удвоенной частотой, соответствующих первоначальному кадру).
В этом описании этот второй способ будет называться "способ разделения изображения на пространственные частоты и распределения их по субкадрам для отображения".
Как "способ разделения изображения на пространственные частоты и распределения их по субкадрам для отображения", этот способ известен в японском выложенном патенте № 6-70288 (здесь далее упоминается как патентная ссылка 1), в японском выложенном патенте № 2002-351382 (здесь далее упоминается как патентная ссылка 2) и публикации патентной заявки США № 2006/0227249 A1 (здесь далее упоминается как патентная ссылка 3).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение может дополнительно улучшить последний (второй способ) с относительно малой нагрузкой на обработку.
При изучении "способа разделения изображения на пространственные частоты и распределения их по субкадрам для отображения" поставлены две проблемы.
Первая проблема состоит в том, что изображение на дисплее при фактическом прослеживании имеет искажение. Вторая проблема состоит в том, что невозможно добиться полного использования динамического диапазона устройства отображения.
Первая проблема, как предполагается, возникает, когда пространственная высокочастотная составляющая и пространственная низкочастотная составляющая, полученные из каждого кадра входного изображения, распределяются по субкадрам и временные центры тяжести их составляющих в изображении смещаются.
При прослеживании время отображения каждого изображения соответствует пространственной позиции изображения, наблюдаемого при прослеживании. Если временной центр тяжести смещается, пространственный центр тяжести в изображении, наблюдаемом при прослеживании, смещается. При этом в изображении, наблюдаемом при прослеживании, если пространственный центр тяжести пространственной высокочастотной составляющей и пространственный центр тяжести пространственной низкочастотной составляющей имеют смещение относительно друг друга, получается изображение, имеющее искажение типа ореола или размытого хвоста как в обычном изображении.
В патентной ссылке 1 частота первоначального изображения удваивается и пространственная высокочастотная составляющая одного субкадра (одного из двух соответствующих кадров с двойной частотой) ограничивается и присутствие/отсутствие ограничения управляется в соответствии с движением изображения. Следовательно, когда высокочастотная составляющая ограничивается, ее временной центр тяжести смещается в субкадр, в котором высокочастотная составляющая не ограничивается. В результате отображается изображение, в котором временной центр тяжести высокочастотной составляющей и центр тяжести низкочастотной составляющей входного изображения имеют смещение и при прослеживании могут наблюдаться ореол или размытый хвост.
В патентной ссылке 2 частота первоначального изображения удваивается и пространственные высокочастотные составляющие двух кадров с удвоенной частотой (два субкадра, соответствующих кадру входного изображения) увеличиваются или уменьшаются в соответствии с движением. В этом случае также временной центр тяжести пространственной высокочастотной составляющей смещается к субкадру, в котором высокочастотная составляющая увеличивается. Следовательно, при прослеживании могут наблюдаться ореол или размытый хвост подобно описанному выше случаю.
В патентной ссылке 3 частота первоначального изображения удваивается и пространственная высокочастотная составляющая одного субкадра увеличивается, а пространственная высокочастотная составляющая другого субкадра уменьшается на ту же самую величину. В этом случае также временной центр тяжести пространственной высокочастотной составляющей смещается в субкадр, в котором высокочастотная составляющая увеличивается. Следовательно, при прослеживании могут наблюдаться ореол или размытый хвост, подобно описанному выше случаю.
Вторая проблема, состоящая в том, что невозможно полностью использовать динамический диапазон устройства отображения, будет описана ниже.
Когда уровень отображения одного субкадра перемещается к другому субкадру, максимальная интенсивность отображения субкадра, чей уровень отображения повысился, ограничивается. В это время интенсивность отображения субкадра с более низким уровнем отображения не достигает максимального значения. По этой причине невозможно максимально использовать динамические диапазоны этих двух субкадров.
Настоящее изобретение было сделано с учетом описанных выше проблем и ставит своей задачей обеспечение пути смягчения, по меньшей мере, первой и/или второй проблем, используя для этого простую схему.
Например, настоящее изобретение для решения первой проблемы предлагает следующую схему.
В соответствии с одним аспектом настоящего изобретения, обеспечивается устройство обработки изображений, выполненное с возможностью вывода данных движущегося изображения, которое вводится содержащим m кадров в единицу времени и выводится в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, содержащее:
блок фильтров, выполненный с возможностью разделения данных изображения интересующего входного кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
блок запоминающего устройства, выполненный с возможностью запоминания пространственной высокочастотной составляющей и пространственной низкочастотной составляющей данных изображения, полученных с помощью блока фильтров;
блок считывания, выполненный с возможностью считывания пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения из блока запоминающего устройства N раз;
блок умножения, выполненный с возможностью умножения пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются такими, чтобы сделать временной центр тяжести пространственной высокочастотной составляющей совпадающим с временным центром тяжести пространственной низкочастотной составляющей данных изображения и создать временное распределение пространственной высокочастотной составляющей данных изображения меньшим, чем временное пространственное распределения низкочастотной составляющей данных изображения;
блок суммирования (3), выполненный с возможностью суммирования пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения после умножения блоком умножения всякий раз, когда данные считываются; и
блок вывода, выполненный с возможностью вывода суммированных данных изображения, полученных от блока суммирования.
Согласно другому аспекту настоящего изобретения обеспечивается устройство обработки изображений, выполненное с возможностью приема входных данных движущегося изображения, содержащего m кадров в единицу времени, и вывода данных движущегося изображения, содержащего 2m кадров в единицу времени, содержащее:
приемный блок, выполненный с возможностью приема входных данных изображения каждого кадра;
блок фильтров, выполненный с возможностью разделения данных изображения интересующего входного кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
блок запоминающего устройства, выполненный с возможностью запоминания данных входного изображения, пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения;
вычислительный блок, выполненный с возможностью вычисления усредненных низкочастотных данных изображения, которые являются средним значением данных низкочастотной составляющей изображения входного кадра, соседствующего во времени с интересующим кадром, и данных низкочастотной составляющей изображения интересующего кадра, запомненного в блоке запоминающего устройства;
блок формирования, выполненный с возможностью формирования данных изображения с акцентированной высокочастотной составляющей на основе низкочастотной составляющей данных изображения и высокочастотной составляющей данных изображения; и
блок вывода, выполненный с возможностью вывода последовательно для каждого кадра данных изображения с акцентированной высокочастотной составляющей и данных изображения с усредненной низкочастотной составляющей, полученных вычислительным блоком.
В соответствии с еще одним аспектом настоящего изобретения создано устройство обработки изображений, выполненное с возможностью вывода данных движущегося изображения, которое вводится содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащих N×m (N≥2) кадров в единицу времени, содержащее:
блок фильтров, выполненный с возможностью разделения входных данных движущегося изображения интересующего кадра на R (R≥2) составляющих данных изображения, соответствующих полосам пространственных частот;
блок запоминающего устройства, выполненный с возможностью запоминания R составляющих данных изображения, полученных с помощью блока фильтров;
блок считывания, выполненный с возможностью считывания R составляющих данных изображения из блока запоминающего устройства N раз;
блок умножения, выполненный с возможностью умножения R составляющих данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются такими, чтобы сделать временные центры тяжести R составляющих данных изображения совпадающими и сделать временное распределение R составляющих данных изображения уменьшающимся при повышении пространственной частоты составляющей изображения;
блок суммирования, выполненный с возможностью суммирования R составляющих данных изображения, соответствующих полосам пространственных частот, после умножения блоком умножения всякий раз, когда блок считывания считывает R составляющих данных изображения, соответствующих полосам пространственных частот; и
блок вывода, который выводит суммированные данные изображения, полученные от блока суммирования.
В соответствии с еще одним аспектом настоящего изобретения обеспечивается устройство обработки изображений, выполненное с возможностью вывода данных движущегося изображения, которое вводится содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, содержащее:
блок фильтров, выполненный с возможностью разделения данных изображения интересующего кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
блок запоминающего устройства, выполненный с возможностью запоминания каждой пространственной частотной составляющей данных изображения, полученной с помощью блока фильтров;
блок считывания, выполненный с возможностью считывания пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения из блока запоминающего устройства N раз;
блок умножения, выполненный с возможностью умножения пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются такими, чтобы распределить низкочастотную составляющую данных изображения по большему числу кадров, чем высокочастотную составляющую данных изображения;
блок суммирования, который суммирует пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения после умножения блоком умножения всякий раз, когда блок считывания считывает пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения; и
блок вывода, выполненный с возможностью вывода суммированных данных изображения из блока суммирования.
В соответствии с еще одним другим аспектом настоящего изобретения обеспечивается способ управления устройством обработки изображений, которое выводит данные движущегося изображения, введенного содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, при этом способ содержит этапы, на которых:
разделяют изображение интересующего кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
запоминают каждую пространственную частотную составляющую данных изображения, полученную на этапе фильтрации, в блоке запоминающего устройства;
считывают пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения из блока запоминающего устройства N раз;
умножают пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются так, чтобы сделать временной центр тяжести пространственной высокочастотной составляющей данных изображения совпадающим с временным центром тяжести пространственной низкочастотной составляющей данных изображения и создать временное распределение пространственной высокочастотной составляющей данных изображения меньшим, чем временное распределение пространственной низкочастотной составляющей данных изображения;
суммируют пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения после умножения всякий раз, когда считываются пространственная высокочастотная составляющая данных изображения и пространственная низкочастотная составляющая данных изображения; и
выводят данные изображения, суммированные на этапе суммирования.
В соответствии с еще одним другим аспектом настоящего изобретения обеспечивается способ управления устройством обработки изображений, которое вводит данные движущегося изображения, содержащего m кадров в единицу времени, и выводит данные движущегося изображения, содержащего 2m кадров в единицу времени, при этом способ содержит этапы, на которых:
вводят данные изображения каждого кадра;
разделяют данные изображения входного интересующего кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
запоминают низкочастотную составляющую данных изображения кадра, непосредственно предшествующего интересующему кадру, в блоке запоминающего устройства;
вычисляют низкочастотное среднее значение составляющей данных изображения, являющееся усредненным значением низкочастотной составляющей данных изображения для кадра, введенного следующим по отношению к интересующему кадру, полученной на этапе фильтрации, и низкочастотной составляющей данных изображения, хранящейся в блоке запоминающего устройства; и
последовательно выводят для каждого кадра данные изображения с акцентированной высокочастотной составляющей, созданные на основе низкочастотной составляющей данных изображения и высокочастотной составляющей данных изображения, и среднее значение низкочастотной составляющей данных изображения.
В соответствии с еще одним другим аспектом настоящего изобретения, обеспечивают способ управления устройством обработки изображений, которое выводит данные движущегося изображения, введенного содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, причем способ содержит этапы, на которых:
разделяют входные данные движущегося изображения интересующего кадра на R (R≥2) составляющих данных изображения, соответствующих полосам пространственных частот;
запоминают R полученных составляющих данных изображения в блоке запоминающего устройства;
считывают R составляющих данных изображения из блока запоминающего устройства N раз;
умножают R составляющих данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются такими, чтобы сделать временные центры тяжести R составляющих данных изображения совпадающими и сделать временное распределение R составляющих данных изображения уменьшающимся при повышении пространственной частоты составляющей изображения;
суммируют R составляющих данных изображения, соответствующих полосам пространственных частот, после умножения всякий раз, когда считываются R составляющих данных изображения, соответствующих полосам пространственных частот; и
выводят данные изображения после суммирования.
В соответствии с еще одним другим аспектом настоящего изобретения обеспечивают способ управления устройством обработки изображений, которое выводит данные движущегося изображения, введенного содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, причем способ содержит этапы, на которых:
разделяют входное изображение интересующего кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
запоминают каждую полученную пространственную частотную составляющую данных изображения в блоке запоминающего устройства;
считывают пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения из блока запоминающего устройства N раз;
умножают пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения на заранее заданные коэффициенты умножения, которые установлены так, чтобы распределить низкочастотную составляющую данных изображения на большее число кадров, чем высокочастотную составляющую данных изображения;
суммируют пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения после умножения всякий раз, когда считываются пространственная высокочастотная составляющая данных изображения и пространственная низкочастотная составляющая данных изображения; и
выводят данные изображения после суммирования.
В соответствии с настоящим изобретением, возможно, используя простой процесс, например, уменьшить размывание при движении в устройстве отображения удерживающего типа и уменьшить мерцание в устройстве отображения импульсного типа. Также возможно подавить искажение типа ореола или размытого хвоста при прослеживании. Изобретение также позволяет предотвратить любые неблагоприятные воздействия на качество изображения, вызванные уменьшением яркости или насыщения уровня одного субкадра.
Дополнительно особенности настоящего изобретения станут очевидны из последующего описания примеров вариантов осуществления (со ссылкой на прилагаемые чертежи).
ПЕРЕЧЕНЬ ФИГУР ЧЕРТЕЖЕЙ
Фиг.1 - блок-схема построения устройства обработки изображений в соответствии с первым вариантом осуществления;
Фиг.2 - блок-схема другого построения устройства обработки изображений в соответствии с первым вариантом осуществления;
Фиг.3 - примеры формы сигналов изображений во времени для входных кадров и кадров с удвоенной частотой в соответствии с первым вариантом осуществленя;
Фиг.4 - блок-схема построения обычного устройства обработки изображений;
Фиг.5 - блок-схема построения другого обычного устройства обработки изображений;
Фиг.6 - блок-схема построения еще одного другого обычного устройства обработки изображений;
Фиг.7A-7D - временные диаграммы для объяснения причин размытого хвоста;
Фиг.8A-8C - временные диаграммы для объяснения, почему размывание при движении не происходит в изображении, не меняющемся во времени;
Фиг.9A-9C - временные диаграммы сигналов SH и SL изображения, предполагая, что прослеживание делается для изображений, показанных на Фиг.8A-8C;
Фиг.10A-10C - временные диаграммы сигналов SH и SL изображения, предполагая, что прослеживание делается в первом варианте осуществления;
Фиг.11A-11C - временные диаграммы формы сигналов прослеживания для предшествующего уровня техники;
Фиг.12A-12C - временные диаграммы формы сигналов прослеживания в соответствии с первым вариантом осуществления;
Фиг.13 - временная диаграмма изменения яркости субкадров SH и SL в устройстве отображения удерживающего типа в соответствии со вторым вариантом осуществления;
Фиг.14 - временная диаграмма изменения яркости субкадров SH и SL в устройстве отображения импульсного типа в соответствии со вторым вариантом осуществления;
Фиг.15 - временная диаграмма хронирования отображения кадров обычного устройства отображения удерживающего типа;
Фиг.16 - временная диаграмма хронирования отображения кадров обычного устройства отображения импульсного типа;
Фиг.17 - блок-схема построения устройства обработки изображений в соответствии со вторым вариантом осуществления;
Фиг.18 - блок-схема другого построения устройства обработки изображений в соответствии со вторым вариантом осуществления;
Фиг.19 - блок-схема адаптивного многокаскадного фильтра LPF (4 каскада) в соответствии со вторым вариантом осуществления;
Фиг.20 - блок-схема адаптивного 2-каскадного фильтра LPF в соответствии со вторым вариантом осуществления;
Фиг.21 - временная диаграмма для объяснения содержания процесса в соответствии с третьим вариантом осуществления;
Фиг.22 - временная диаграмма для объяснения содержания процесса в соответствии с третьим вариантом осуществления;
Фиг.23 - временная диаграмма для объяснения предпочтительного содержания процесса в соответствии с третьим вариантом осуществления;
Фиг.24 - временная диаграмма для объяснения предпочтительного содержания процесса в соответствии с третьим вариантом осуществления;
Фиг.25 - коэффициенты усиления в каждой полосе пяти субкадров при 5-кратной скорости воспроизведения в соответствии с четвертым вариантом осуществления;
Фиг.26 - блок-схема построения устройства обработки изображений в соответствии с четвертым вариантом осуществления;
Фиг.27 - блок-схема последовательности выполнения операций процедуры процесса в соответствии с модификацией первого варианта осуществления;
Фиг.28 - таблица взаимосвязей между кадрами в соответствии с первым вариантом осуществления;
Фиг.29 - коэффициенты распределения для субкадров в соответствии с первым вариантом осуществления;
Фиг.30 - блок-схема построения устройства обработки изображений в соответствии с модификацией первого варианта осуществления;
Фиг.31 - блок-схема адаптивного многокаскадного фильтра LPF (4 каскада), выполняющего процесс фильтрации для полного изображения в соответствии со вторым вариантом осуществления; и
Фиг.32 - блок-схема адаптивного 2-каскадного фильтра LPF, выполняющего процесс фильтрации для полного изображения в соответствии со вторым вариантом осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Варианты осуществления настоящего изобретения будут теперь описаны со ссылкой на сопроводительные чертежи.
Для простоты понимания вариантов осуществления настоящего изобретения сначала будет описан предшествующий уровень техники со ссылкой на фиг.4-6.
В схеме, соответствующей предшествующему уровню техники, показанной на фиг.4, изображения входных кадров раздельно временно сохраняются в двух устройствах запоминания кадров и альтернативно выводятся с удвоенной входной частотой через переключатель SW0, тем самым удваивая частоту кадров исходного сигнала. В это время высокочастотная составляющая пространственной частоты одного субкадра подавляется. Как результат, субкадр (обозначенный как SL на фиг.4) содержит относительно малую величину пространственной высокочастотной составляющей. Другой субкадр (обозначенный как SH на фиг.4) содержит относительно большую величину пространственной высокочастотной составляющей. Поэтому пространственная высокочастотная составляющая ограничивается в одном из субкадров выходного изображения. Это уменьшает размывание при движении.
В другой схеме, соответствующей предшествующему уровню техники, показанной на фиг.5, преобразователь кадров удваивает частоту кадров входного изображения. Фильтр нижних/верхних частот (LPF/HPF) разделяет пространственную частоту на пространственную низкочастотную составляющую, "Low", и пространственную высокочастотную составляющую, "High". Высокочастотная составляющая High умножается на заданный коэффициент усиления α для каждого кадра с удвоенной частотой (или для одного из субкадров, если смотреть для кадра входного изображения). Полярность α изменяется в каждом кадре с удвоенной частотой, используя α с положительным значением в одном из кадров с двойной частотой и α с отрицательным значением в другом кадре с двойной частотой. Если определено, что движение изображения большое, абсолютная величина α может быть увеличена. Пространственная высокочастотная составляющая, следовательно, локализуется в одном кадре с двойной частотой (или в одном субкадре, если смотреть для входного изображения) SH. Это уменьшает размывание при движении.
Еще в одной другой схеме, соответствующей предшествующему уровню техники, показанной на фиг.6, входное изображение проходит через фильтр HPF, чтобы создать данные H[i] пространственных высокочастотных составляющих. Данные H[i] пространственных высокочастотных составляющих добавляются к входному изображению A[i], чтобы создать данные изображения SH[i] с акцентированной высокочастотной составляющей. Данные H[i] пространственных высокочастотных составляющих вычитаются из входного изображения A[i], чтобы создать низкочастотные данные SL[i]. Эти данные переключаются с удвоенной частотой кадров входного изображения переключателем SW0, таким образом осуществляя вывод изображения с удвоенной частотой, в котором пространственная высокочастотная составляющая сосредоточена в одном из кадров с удвоенной частотой (один субкадр, если смотреть для кадра входного изображения). Это уменьшает размывание при движении.
В этих схемах, соответствующих предшествующему уровню развития техники, два соответствующих кадра с двойной частотой (или один из субкадров, если смотреть для кадра входного изображения), то есть кадры SH и SL, создаются на основе одного входного кадра. Когда, например, кадр SH отображается первым, а кадр SL отображается за ним, кадр SH содержит большую величину пространственной высокочастотной составляющей кадра входного изображения. Следовательно, пространственная высокочастотная составляющая смещается вперед во времени. С другой стороны, пространственная низкочастотная составляющая распределяется по обоим кадрам SH и SL и вообще не смещается во времени. Следовательно, пространственная высокочастотная составляющая смещается вперед во времени относительно пространственной низкочастотной составляющей.
Когда прослеживание делается для движущейся части движущегося изображения, смещение вперед во времени эквивалентно пространственному смещению в направлении движения в изображении, наблюдаемом при прослеживании. Следовательно, пространственная высокочастотная составляющая в изображении, наблюдаемом при прослеживании, смещается в направлении движения относительно пространственной низкочастотной составляющей. В этом случае наблюдается изображение, имеющее ореол или размытый хвост.
<Первый вариант осуществления>
Первый вариант осуществления может смягчить описанную выше первую проблему. Более конкретно, первый вариант осуществления может позволить исключить относительное смещение по времени в изображении (выходном) пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения. В первом варианте осуществления поэтому возможно предотвратить или уменьшить ореол или размытый хвост в изображении, наблюдаемом при прослеживании.
На фиг.1 показана блок-схема построения устройства обработки изображений в соответствии с первым вариантом осуществления.
На фиг.1 показано устройство, принимающее каждый кадр данных движущегося изображения и создающее два субкадра (данные движущегося изображения с двойной частотой) из входных данных движущегося изображения одного кадра. Входные данные движущегося изображения одного кадра представляются как A[i], а входные данные пространственной высокочастотной составляющей входных данных движущегося изображения A[i] представляются как H[i] (пространственные высокочастотные данные). Данные пространственной низкочастотной составляющей (пространственная низкочастотная составляющая данных изображения) представляются как L[i]. Один из кадров с удвоенной частотой (или субкадров), которые поочередно выводятся, чтобы реализовать изображение с двойной частотой, представляется как SH[i], и другой представляется как SL[i]. Индекс "[i]" указывает i-ый кадр входного движущегося изображения.
Фильтр 1 нижних частот (здесь далее упоминается как LPF) является двумерным фильтром нижних частот. Этот фильтр не определяет конкретную функцию. Например, для использования пригодна функция Гаусса. Альтернативно, для использования пригодно среднее значение движущегося изображения или взвешенное среднее значение движущегося изображения. В последующем описании эффективное расстояние, составляющее 1/2 от максимального значения коэффициента фильтра, определяется как "константа расстояния: d". Значение константы d расстояния указывает длину волны, соответствующую пространственной частоте, которая равна частоте среза при ограничении ширины полосы изображения с помощью пространственного частотного фильтра. Единицей измерения d является "пиксел".
LPF 1 сначала вырезает (отфильтровывает) из входного изображения A[i] верхние пространственные частоты выше заранее заданного постоянного значения, тем самым создавая данные L[i] пространственной низкочастотной составляющей. Вычитающее устройство 2 вычисляет данные H[i] пространственной высокочастотной составляющей, вычитая L[i] из данных A[i] первоначального изображения в соответствии с выражением:
H[i]=A[i]-L[i]
Сумматор 3 суммирует данные H[i] высокочастотных составляющих с данными A[i] первоначального изображения, тем самым создавая данные субизображения (данные изображения с акцентированной высокочастотной составляющей) SH[i], содержащие большое количество пространственных высокочастотных составляющих.
SH[i]=A[i]+H[i]=L[i]+2×H[i]
Каждая из схем 4 и 5 задержки кадров задерживает текущий кадр на один кадр, чтобы выполнить вычисление между текущим кадром и следующим кадром. Схема 4 задержки кадра устраняет смещение кадра между вводом сигнала на вывод а переключателя 8 и вводом сигнала на вывод b.
Сумматор 6 суммирует данные L[i-1] пространственных низкочастотных составляющих, созданные с помощью LPF 1 и задержанные на один кадр, с L[i] следующего кадра.
Делитель 7 вычисляет среднее значение путем деления данных изображения сумматора 6 на "2" и вывода их в качестве усредненных низкочастотных данных изображения SL[i-1].
SL[i-1]={L[i-1]+L[i]}/2
Схема 4 задержки кадров задерживает SH[i] на один кадр, чтобы создать SH[i-1], так чтобы данные SH[i], вычисленные сумматором 3, совпадали с данными SL[i-1].
Созданные таким образом данные SH[i-1] и SL[i-1] выбираются переключателем 8 с частотой, равной удвоенной частоте кадров входного изображения, и последовательно выводятся. Это позволяет выводить сигнал изображения с двойной частотой, содержащий пространственную высокочастотную составляющую, локализованную в одном кадре. Поэтому возможно реализовать изображение с малой размытостью при движении и малым мерцанием.
В вариантах осуществления настоящего изобретения вычисления и определения объясняются для отображаемой яркости (отображаемая сила света) в качестве примера. В вариантах осуществления временная диаграмма, показывающая, например, форму сигнала изображения, указывает по оси ординат яркость. Следовательно, настоящее изобретение наиболее эффективно, когда применяется к данным изображения, определенным как данные, пропорциональные отображаемой яркости (отображаемой силе света). Однако настоящее изобретение не всегда ограничивается таким случаем. Настоящее изобретение также применяется к данным изображения в обычно используемом диапазоне (данные изображения, имеющие небольшую нелинейность между значениями данных и отображаемой яркостью или силой света). Даже в этом случае концепция настоящего изобретения приблизительно сохраняет и обеспечивает достаточно выгодный эффект.
На фиг.1 показан пример, использующий SH[i-1]. На фиг.2 показан пример, в котором схема, эквивалентная показанной на фиг.1, построена, используя фильтр верхних частот (HPF).
Ссылочный номер 11 на фиг.2 обозначает фильтр верхних частот (здесь далее упоминаемый как HPF). На фиг.2 показана схема, которая предполагает, что LPF 1 на фиг.1 и HPF 11 на фиг.2 связаны соотношением A[i]=H[i]+L[i]. Ссылочный номер 13 на фиг.2 обозначает вычитающее устройство; 12 и 16 - сумматоры; 14 и 15 - схемы задержки кадров; 17 - делитель; и 18 - переключатель. Основополагающие элементы могут быть в достаточной степени поняты, основываясь на иллюстрированной схеме, и подробное их описание будет пропущено.
На фиг.3 показаны отношения соответствия между входным изображением А[i] и выходными изображениями SH[i] и SL[i] в первом варианте осуществления. Последовательность прохождения кадров представляется во времени на чертеже сверху вниз. Выходное изображение выводится с задержкой во времени, по меньшей мере, на один кадр относительно соответствующего входного изображения.
Выходные изображения SH[i-1], SH[i], и SH[i+1] соответствуют входным изображениям А[i-1], А[i] и А[i+1], соответственно. Элементы выходных изображений вычисляются из соответствующих кадров входных изображений. С другой стороны, например, составляющие элементы L[i] и L[i+1] выходного изображения SL[i] вычисляются из А[i] и А[i+1] соответственно. SL[i] является средним значением элементов.
При этих соотношениях 1/2 L[i], которая является пространственной низкочастотной составляющей данных А[i], выводится (отображается) как SL[i], и остающиеся 1/4-составляющие отображаются как SL[i-1] и SL[i].
Следовательно, временной центр тяжести отображения L[i] располагается в промежуточной точке между SL[i-1] и SL[i], то есть в центре периода отображения SH[i]. С другой стороны, H[i], которая вычисляется как пространственная высокочастотная составляющая А[i], полностью отображается как SH[i]. Временной центр тяжести отображения H[i] располагается в центре периода отображения SH[i]. Следовательно, временной центр тяжести отображения L[i] совпадает с временным центром тяжести H[i]. То есть такое искажение, как ореол или размытый хвост, наблюдаемые в изображении при прослеживании, может быть предотвращено.
<Порядок SH и SL>
Этот вариант осуществления будет объясняться, предполагая, что два сигнала субкадров SH[i] и SL[i], соответствующие одному входному кадру данных А[i], выводятся так, что они отображаются в таком порядке. Для примера, в таблице на фиг.28 явно показывается такой порядок. Однако настоящее изобретение не ограничено этим порядком и порядок может быть изменен на обратный. Даже при порядке, измененном на обратный, настоящее изобретение обладает тем же самым эффектом.
Порядок, при котором SL выводится позже, как при объяснении этого варианта осуществления, здесь далее будет упоминаться как "прямой порядок", а порядок, при котором SL выводится первым, будет упоминаться как "обратный порядок".
При "прямом порядке" SL принимает среднее значение путем ссылки на низкочастотную составляющую интересущего кадра и на низкочастотную составляющую следующего сразу за ним кадра. Фактически, после задержки на один кадр для сразу следующего за ним кадра, вычисляется среднее значение между временно сохраненным текущим кадром и вновь введенным кадром. Следовательно, выходное низкочастотное изображение выражается следующим образом:
SL[i-1]=(L[i-1]+L[i])/2
Напротив, при "обратном порядке" SL принимает среднее значение путем ссылки на низкочастотную составляющую интересующего кадра и кадра, непосредственно ему предшествующего. Следовательно, выходное низкочастотное изображение выражается следующим образом:
SL[i]=(L[i]+L[i-1])/2
Эти два уравнения имеют одну и ту же форму, за исключением того, что номера выходных кадров отличаются на единицу.
В любом случае, одни данные SL низкочастотного изображения соответствуют среднему значению низкочастотных изображений, отражающемуся на двух субкадрах SH, смежных с интересующим субкадром.
Как описано в связи с предшествующим уровнем техники двухстороннее асимметричное искажение происходит в изображении для прослеживания, как показано на фиг.9A-9C или 11A-11C. Форма искажения изменяется между "прямым порядком" и "обратным порядком". Более конкретно, форма полностью меняется на обратную в боковом направлении. В частности, искажение с размытым хвостом меняет свое направление на обратное.
<Подробное объяснение работы первого варианта осуществления>
В этом варианте осуществления N=2 и пространственная частота имеет два диапазона, диапазон H высоких частот и диапазон L низких частот. В настоящем изобретении, однако, частота кадров входного изображения может быть умножена на N (или входное изображение может быть разделено на N субкадров), и входное изображение может быть разделено на множество диапазонов пространственных частот. В этом случае множества диапазонов более высокочастотная составляющая концентрируется на временной основе, тогда как низкочастотная составляющая распределяется на временной основе. Дополнительно временные центры тяжести располагаются так, чтобы совпадать. Следовательно, N может быть равно 2 или больше, так чтобы входное изображение делилось на множество полос пространственных частот.
Чтобы удовлетворить вышеупомянутые условия пространственной высокочастотной составляющей H и пространственной низкочастотной составляющей L и сконцентрировать H в одном субкадре, число субкадров, подлежащих распределению, должно быть нечетным и не менее 3. В этом варианте осуществления, где N=2, и отображение выполняется, используя субкадры, полученные путем удвоения частоты кадров. Одно входное изображение распределяется по трем субкадрам. То есть число Nd субкадров для распределения равно 3. В этом варианте осуществления отношения (N=2 и Nd=3) достигаются одновременно, поскольку кадры, соседствующие друг с другом во входном изображении, совместно используют один из субкадров в конце как субкадр для распределения. Если N - четное число, составляющие распределяются на Nd субкадров (Nd≥N), где Nd является нечетным числом, и соседствующие кадры совместно используют, например, один субкадр. Коэффициент субкадра получается путем суммирования первоначальных коэффициентов распределения. Это решает проблему рассогласования между N и Nd. Значение суммы не должно превышать коэффициент другого субкадра той же самой пространственной частотной составляющей.
На фиг.28 показана таблица относительных соотношений изображений. То есть фиг.28 точно выражает работу устройства, показанного на фиг.1, в соответствии с преобразованием кадров. Преобразование кадров показывается на фиг.28 в горизонтальном направлении. Типы изображений или составляющих изображений показываются в вертикальном направлении. Каждая ячейка первой строки представляет один кадр входного изображения последовательно слева направо. Во второй строке каждый столбец представляет один субкадр последовательно слева направо. Выходное изображение задерживается на один кадр относительно входного изображения A. Следовательно, на фиг.28 также значение i во второй строке меньше на единицу, чем значение в первой строке.
Первая строка на фиг.28 представляет входное изображение A. Вторая строка представляет субкадры, которые должны быть выведены. Строки с третьей по седьмую показывают пространственную высокочастотную составляющую H и пространственную низкочастотную составляющую L, которые извлекаются из каждого кадра входного изображения А, используя фильтр и умножение на коэффициенты. Восьмая строка представляет разбивку суммарных выходных составляющих субкадров, показанных во второй строке.
Частотные составляющие, соответствующие A[i] в первой строке на фиг.28, показаны в четвертом-шестом столбцах пятой строки. На фиг.29 показаны подробности этой части процесса. Таким образом, каждый кадр входного изображения распределяется (умножается) на три субкадра, используя коэффициенты, показанные на фиг.28. На фиг.29 GL1-GL3 равны {0,5, 1, 0,5}, и GH1-GH3 равны {0, 2, 0}.
На фиг.30 показана модификация первого варианта осуществления. Схема, показанная на фиг.30, имеет ту же самую функцию, что и схема на фиг.1. Фиг.1 иллюстрирует вариант осуществления в самой простой форме. Фиг.30 показывает, например, как распределить входное изображение А на три субкадра в заранее заданном отношении в соответствии с фиг.28. Также возможно реализовать пример схемы, отличный от фиг.1, соответственно изменяя коэффициенты умножителей, показанных на фиг.30, при удовлетворении заданного условия.
Далее будет описана блок-схема, показанная на фиг.30. Схема 50 удвоения удваивает частоту входного сигнала кадровой синхронизации (например, 60 Гц), чтобы получить синхронизирующий сигнал clk2 120 Гц. Фильтр 53 разделяет входное изображение на пространственную высокочастотную составляющую (H) и пространственную низкочастотную составляющую (L) и соответствует комбинации LPF 1 и вычитающего устройства 2 на фиг.1. Каждый из переключателей 51 и 52 переключает выходные выводы в порядке (0)→(1) или (1)→(0) всякий раз при вводе сигнала синхронизации кадров для А[i].
Каждый из переключателей 58-61 переключает свои четыре выходных вывода в порядке (1)→(2)→(3)→(4)→(1)… шаг за шагом всякий раз, когда вводится выходной сигнал clk2 от схемы 50 удвоения. Переключатели 58 и 59 подключаются к каналам с теми же самыми номерами. Переключатели 60 и 61 также подключаются к каналам с теми же самыми номерами. Однако переключатели 60 и 61 подключаются к каналам, номера которых отличаются на два от каналов переключателей 58 и 59. Выходные выводы (4) переключателей являются фиктивными подключениями, чтобы определять выборы времени. Для операции, показанной на фиг.28, каждый переключатель переключает выходные выводы в порядке (1)→(2)→(3)→(4)→(1)→(2)… в соответствии с clk2.
Умножитель с заданным коэффициентом подключается к каждому каналу переключателями 58-61. Каждый из сумматоров 62, 63, 64 и 65 суммирует выходные сигналы с соответствующего переключателя. Сумматор 66 суммирует выходные сигналы от сумматоров 62-65.
Переключатели 58 и 60 имеют одну и ту же комбинацию коэффициентов умножения умножителей. Переключатели 59 и 61 также имеют одну и ту же комбинацию коэффициентов множителей.
Коэффициенты GH1-GH3 умножителей переключателей 58 и 60 связаны с пространственной высокочастотной составляющей и указываются на фиг.29 как составляющая H. Коэффициенты GL1-GL3 умножителей переключателей 59 и 61 связаны с пространственной низкочастотной составляющей и указываются на фиг.29 как составляющая L.
Далее со ссылкой на фиг.30 будет описано прохождение сигналов. Фиг.30 показана схема, работающая при временных характеристиках, показанных в четвертом столбце на фиг.28 (то есть временных зарактеристиках, соответствующих субкадру SL[i-1]). Фильтр 53 разделяет входной сигнал А[i] на пространственную высокочастотную составляющую H[i] и пространственную низкочастотную составляющую L[i]. Разделенные пространственная высокочастотная составляющая H[i] и пространственная низкочастотная составляющая L[i] посылаются на переключатели 51 и 52 соответственно. Переключатели переключают выходные выводы (1) для временного запоминания частотных составляющих устройствах 56 и 57 запоминания кадров.
Выходные выводы (0) переключателей 51 и 52 предварительно выводят составляющие от непосредственно предшествующих кадров H[i-1] и L[i-1] в устройства 54 и 55 запоминания кадров, так чтобы временно хранить в них сигналы.
Устройства 54, 55, 56 и 57 запоминания кадров принимают новые данные от фильтра 53 и обновляют свое содержимое всякий раз, когда переключатели 51 и 52 подключаются к соответствующим выводам. Каждая позиция запомненных данных хранится в течение периода, соответствующего периодам двух кадров во входном изображении. Дополнительно, немедленно перед изменениями подключений переключателей 58-61 с выходного вывода (4) на выходной вывод (1), содержимое соответствующих устройств запоминания кадров обновляется.
В этом состоянии переключатели 58-61 последовательно изменяют выходные выводы. Эти выходы добавлены, чтобы получить выходной результат для этого варианта осуществления. Например, когда переключатели 58 и 59 изменяют выходные выводы в порядке (1)→(2)→(3), это указывает, что составляющие, соответствующие А[i-1] на фиг.28, выводятся, то есть составляющие, соответствующие полосам пространственных частот, выводятся в порядке: второй столбец → третий столбец → четвертый столбец четвертой строки. Точно так же, когда переключатели 60 и 61 изменяют выходные выводы в порядке (1)→(2)→(3), это указывает, что составляющие, соответствующие А[1] на фиг.28, то есть составляющие, соответствующие полосам пространственных частот, выводятся в порядке: четвертый столбец → пятый столбец → шестой столбец пятой строки.
Выходной сигнал устройства по этой блок-схеме, полученный описанным выше способом, соответствует восьмой строке (самый нижний этап) на фиг.28. Коэффициенты, показанные на фиг.29, используются как коэффициенты GL1-GL3 и GH1-GH3 умножителей, показанных на фиг.30. Пока используются эти коэффициенты, схема, показанная на фиг.30, имеет ту же самую функцию, что и на фиг.1. Чтобы соответствовать особенности настоящего изобретения, необходимо, чтобы, например, первый и третий члены были равны в сочетании с GL1-GL3, сумма коэффициентов равнялась 2 и удвоенное значение коэффициентов на каждом конце было меньше или равно этому значению в центре. Следовательно, GL1-GL3 могут быть, например, {0,4, 1,2, 0,4} или {0,3, 1,4, 0,3}. Когда GL1-GL3 на фиг.30 заменяются этими коэффициентами, создается немного большее мерцание по сравнению с первым вариантом осуществления, хотя может быть реализован вариант осуществления с меньшим искажением. Последние коэффициенты имеют тенденцию обеспечивать больший эффект.
В результате может быть получено изображение, имеющее меньшее размывание при движении и меньшее мерцание, как в первом варианте осуществления.
<Причина размытого хвоста>
Причина, по которой возникает ореол или размытый хвост, когда временной центр тяжести смещается между L[i] и H[i], будет описана ниже. Здесь будет объяснен пример, в котором частота кадров входного изображения равна 60 Гц.
Заметим, что размытый хвост является своего рода искажением, при котором до или после края объекта при прослеживании тянется хвост.
Рассмотрим прослеживание изображения, которое имеет строку сканирования яркости с прямоугольной формой сигнала и которое движется со скоростью V (пиксел) за 1/60 секунды, как показано на фиг.7A. То есть изображение является движущимся изображением, имеющим объект, который движется со скоростью V (пиксел) между кадрами.
В устройстве отображения удерживающего типа с длительностью импульса, например, 1/60 секунды (частота кадров: 60 Гц) наблюдается размывание при движении с шириной V (пиксел)(в соответствии с наклоненными частями, показанными на фиг.7B).
В устройстве отображения удерживающего типа с длительностью импульса, например, 1/120 секунды (частота кадров: 120 Гц) наблюдается размывание при движении с шириной V/2 (пиксел) (в соответствии с наклоненными частями, показанными на фиг.7C).
При импульсном запуске длительность импульса маленькая. Следовательно, при прослеживании получается изображение, относительно близкое к форме сигнала для неподвижного изображения. На фиг.7D показан случай, в котором длительность импульса равна 1/1200 секунды. В любом случае, размывание при движении, представленное шириной наклоненной части, имеет значение, почти равное длительности импульса. Частота кадров не связана напрямую с этим значением. В устройстве отображения удерживающего типа длительность импульса равна или почти равна "1/частота кадров".
На фиг.8A-8C показаны формы сигналов, полученных путем разделения входного изображения А на пространственную высокочастотную составляющую и пространственную низкочастотную составляющую, используя HPF или LPF. На фиг.8A показана форма сигнала входного изображения A. SH (=L+2H) и SL (=L) имеют формы сигналов, показанные на фиг.8B и 8C. Однако на фиг.8A-8C не показаны формы сигналов изображения, наблюдаемые при прослеживании, но для неподвижного изображения. Следовательно, размывание при движении не оказывает никакого влияния.
На фиг.9A-9C показаны сигналы, предполагающие прослеживание SH[i] и SL[i] на фиг.8B и 8C.
Поскольку период отображения равен 1/120 секунды, форма сигнала показывает размывание при движении, соответствующее длительности импульса 1/120 секунды, согласно фиг.7C. В системах, соответствующих предшествующему уровню техники, поскольку SH[i] создается из того же самого кадра, что и SL[i], они являются кадрами с одной и той же длительностью. При прослеживании SL[i] образуется со смещением относительно SH[i] в направлении, обратном направлению движения изображения на 1/2 (то есть V/2) расстояния перемещения в периоде кадровой частоты.
Фактически SH[i] и SL[i] на фиг.9A и 9B поочередно отображаются каждую 1/120 секунды. Следовательно, реальное человеческое зрение распознает сложную форму сигнала, показанного на фиг.9C. Эта форма сигнала имеет размытый хвост по сравнению с формой сигнала на фиг.7C. Первый вариант осуществления уменьшает это искажение.
В этом варианте осуществления, например, SL[i], который отображается между SH[i] и SH [i+1], формируется из среднего значения пространственных низкочастотных составляющих, соответствующих им, то есть {L[i]+L[i+1]}/2, как показано на фиг.3. На фиг.10A-10C показаны SH[i] (=L[i]+2×H[i]), SL[i] (={L[i]+L[i+1]}/2) и форма сигнала изображения при прослеживании, как на фиг.9A-9C.
Как описано выше, при прослеживании L[i] создается из того же самого кадра входного изображения, что и SH[i], который отображается на 1/120 секунды раньше, и поэтому сформирован со смещением в направлении, противоположном направлению движения изображения на 1/2 (V/2) расстояния перемещения на кадр. С другой стороны, L[i+1] создается из того же самого кадра входного изображения, что и SH[i+1], который отображается на 1/120 секунды позже, и поэтому сформирован со смещением в направлении, противоволожном направлению движения изображения на 1/2 (V/2) расстояния перемещения на кадр. Следовательно, форма сигнала SL[i] (={L[i]+L[i+1]}/2), полученного путем их суммирования и деления суммы на 2, расположена почти в том же самом месте, что и SH[i] с точки зрения временного центра тяжести, как показано на фиг.10B.
Фактически SH[i] и SL[i] на фиг.10A и 10B поочередно отображаются каждую 1/120 секунды. Следовательно, реальное человеческое зрение распознает сложную форму сигнала (фиг.10C). Эта форма сигнала является с двух сторон симметричной и не имеет размытого хвоста по сравнению с показанным на фиг.9C. Уменьшение искажения с размытым хвостом является эффектом этого варианта осуществления.
Выше был описан пример, в котором устройство отображения удерживающего типа, длительность импульса у которого равна периоду частоты кадров, отображает входное изображение с частотой кадров 60 Гц с удвоенной частотой. Даже в устройстве отображения импульсного типа проблемы на предшествующем уровне техники и эффект варианта осуществления являются одними и теми же.
Предположим, что устройство отображения импульсного типа имеет длительность импульса, равную 1/10 периода кадровой развертки, то есть входное изображение имеет длительность импульса 1/600 секунды (1,67 мс) и частоту кадров 60 Гц. Рассмотрим случай, в котором когда частота кадров удваивается, длительность импульса равна 1/2 от него (1/1200 секунды (= 0,83 мс)).
В этом случае, при прослеживании изображение на предшествующем уровне техники имеет форму сигнала, показанную на фиг.11A-11C, и изображение при прослеживания в соответствии с этим вариантом осуществления имеет форму сигнала, показанную на фиг.12A-12C. Фиг.11A-11C соответствуют фиг.9A-9C. Фиг.12A-12C соответствуют фиг.10A-10C.
V/2 на фиг.9A и 10A эквивалентно расстоянию, соответствующему длительности импульса, которая является причиной размывания при движении и поэтому заменяется на V/20 на фиг.11A и 12A. V/2 на фиг.9B и 10B эквивалентно расстоянию, соответствующему разнице во времени между кадрами и поэтому остается равной V/2 даже на фиг.11B и 12B.
<Модификация первого варианта осуществления>
Будет описан пример, в котором процесс, эквивалентный первому варианту осуществления, осуществляется с помощью компьютерной программы. Устройство для выполнения компьютерной программы может быть устройством обработки информации типа персонального компьютера (PC). Структура и особенности оборудования, содержащего PC, хорошо известны, поэтому здесь описываться не будут. Мы предполагаем, что файл данных движущегося изображения, содержащий m кадров в единицу времени уже хранится в запоминающем устройстве (или на носителе данных), таком как жесткий диск. Будет описан пример, в котором центральный процессор (CPU), выполняющий прикладную программу (компьютерную программу) этой модификации, преобразует файл в данные движущегося изображения, которые должны воспроизводиться с двойной частотой кадров, то есть 2m кадров в единицу времени, и сохраняет результат преобразования на жестком диске в виде файла. Целевые данные преобразования для движущегося изображения хранятся в запоминающем устройстве. Данные движущегося изображения после преобразования с удвоением частоты также сохраняются в запоминающем устройстве. Следовательно, для прикладной программы нет необходимости отображать результат преобразования с удвоенной частотой. То есть заметим, что CPU также нет необходимости выполнять процесс в синхронизме с частотой кадров движущегося изображения, представленного целевыми данными преобразования для движущегося изображения. Прикладная программа модификации также хранится на жестком диске. CPU загружает прикладную программу в оперативное запоминающее устройство (RAM) и исполняет ее.
На фиг.27 показана блок-схема последовательности выполнения операций при исполнении прикладной программы. Процедура исполнения программы CPU будет описана ниже со ссылкой на фиг.27. В последующем объяснении области памяти А и B являются областями, выделенными в RAM.
На этапе S1 CPU считывает данные изображения А[i] одного кадра из целевых данных преобразования для движущегося изображения в RAM. Если данные закодированы, CPU выполняет соответствующий процесс декодирования.
На этапе S2 CPU фильтрует интересующий кадр данных входного изображения, А[i], используя предварительный LPF, чтобы создать данные L[i] пространственных низкочастотных составляющих.
Процесс переходит на этап S3. CPU создает данные H[i] пространственных высокочастотных составляющих.
H[i]=А[i]-L[i]
На этапе S4 CPU создает данные SH[i] изображения с акцентированной высокочастотной составляющей и временно запоминает их в RAM.
SH[i]=А[i]+H[i]=L[i]+2×H[i]
На этапе S5 CPU считывает непосредственно предшествующий кадр SH[i-1] из области А запоминающего устройства в качестве текущего кадра.
На этапе S6 CPU запоминает SH[i] в области А запоминающего устройства, чтобы подготовиться к обработке следующего входного кадра.
На этапе S7 CPU считывает непосредственно предшествующий кадр SL[i-1] из области B запоминающего устройства в качестве текущего кадра.
На этапе S8 CPU запоминает SL[i] в области B запоминающего устройства, чтобы подготовиться к обработке следующего входного кадра.
На этапе S9 CPU создает низкочастотные усредненные данные изображения SL[i-1].
SL [i-1]={L[i-1]+L[i]}/2
После создания данных SH изображения с акцентированной высокочастотной составляющей и низкочастотных усредненных данных SL изображения CPU переводит процесс на этап S10. На этапе S10 CPU выводит данные двух созданных изображений (субкадров) в качестве выходных данных движущегося изображения.
SH[i-1], используемый на этапе S5, использует результат обработки на этапе S6 предшествующего цикла. SL[i-1], используемый на этапе S7, использует результат обработки на этапе S8 предшествующего цикла. В преобразовании с удвоением частоты первого кадра данных изображения никакие низкочастотные данные изображения предшествующего кадра не существуют. В этом случае процесс выполняется, принимая соответствующее значение пиксел.
На этапе S11 CPU определяет, все ли кадры целевых данных преобразования для движущегося изображения преобразованы. Этот процесс может быть выполнен путем определения, обнаружен ли конец файла целевых данных преобразования для движущегося изображения.
При наличии NO на этапе S11 переменная I увеличивается на "1" и процесс повторяется с этапа S1.
При наличии YES на этапе S11 CPU прекращает последовательность процессов преобразования с удвоением частоты.
Как описано выше, по сравнению с первым вариантом осуществления, скорость процесса преобразования зависит от CPU. Однако возможно создать файл данных движущегося изображения с двойной частотой, имеющий те же самые функцию и действие, что и в первом варианте осуществления.
<Второй вариант осуществления>
Во втором варианте осуществления будет описан пример решения описанной выше второй проблемы. На фиг.17 показана блок-схема устройства обработки изображений в соответствии со вторым вариантом осуществления. Те же самые ссылочные цифры, что и на фиг.1, обозначают те же самые составляющие на фиг.17 и их описание будет опущено.
Вторая проблема возникает, когда каждый кадр входного изображения фильтруется, чтобы разделить пространственную высокочастотную составляющую, связанную с размыванием при движении, и пространственную низкочастотную составляющую, связанную с мерцанием. То есть в способе отображения изображения путем концентрации пространственной высокочастотной составляющей в одном субкадре и распределения пространственной низкочастотной составляющей по обоим субкадрам невозможно полностью использовать динамический диапазон устройства отображения.
"Один субкадр" означает один из двух кадров с удвоенной частотой, соответствующих входному кадру изображения. "Оба субкадра" означает оба кадра с удвоенной частотой, соответствующие входному кадру изображения.
При таком способе отображения пространственная высокочастотная составляющая сконцентрирована в одном субкадре, как в дисплее удерживающего типа, показанном на фиг.13, или в дисплее импульсного типа, показанном на фиг.14. Следовательно, если, например, отображается изображение с высокой яркостью, насыщение происходит сначала в субкадре, который отображает SH[i], а субкадр, который отображает SL[i], еще не достигает насыщения даже после того, как описанный выше субкадр находится в насыщении. По этой причине максимальная яркость отображения становится меньше, чем для обычного способа отображения (фиг.15 и 16). Чтобы реально избежать насыщения, первоначальный сигнал изображения должен быть умножен на коэффициент меньше 1. Этот коэффициент будет определен здесь далее как k (0,5≤k≤1). В первом варианте осуществления был описан пример, в котором насыщение не учитывается. Этот пример может также упоминаться как случай, использующий k=1.
Чтобы предотвратить любое уменьшение яркости, коэффициент k должен быть как можно ближе к "1". Чтобы получить это, необходимо минимизировать абсолютное значение частей пространственных высокочастотных составляющих, показанных на фиг.13 или 14, в максимально возможной степени, чтобы уменьшить неравномерность яркости. Части пространственных высокочастотных составляющих, показанные на фиг.13 или 14, могут принимать положительное или отрицательное значение. Для простоты изложения, на фиг.13 и 14 показан случай, в котором значение является положительным.
Для этой цели значение константы d расстояния для LPF или HPF минимизируется. Более конкретно, пространственная частота, которая должна делиться на пространственную низкочастотную составляющую и пространственную высокочастотную составляющую, должна устанавливаться высокой. Другими словами, значение константы расстояния фильтра должно быть сделано малым, чтобы уменьшить абсолютное значение высокочастотной составляющей.
Если значение константы d расстояния слишком мало, часть с выбросом на заднем фронте, показанная на фиг.9C или 10C, становится заметной. Когда константа d расстояния достаточно большая, форма сигнала на фиг.10C похожа на форму сигнала на фиг.7C. Выброс становится заметным по мере того, как целевое изображение при прослеживании движется быстрее. То есть минимальное и необходимое значение d для воспроизведения формы сигнала волны должно определяться на основе скорости входного изображения как цели прослеживания.
Во втором варианте осуществления большое значение константы d расстояния устанавливается для части, которая быстро движется во входном изображении. Малое значение константы d расстояния устанавливается для части, которая движется медленно. То есть во втором варианте осуществления значение константы d расстояния определяется адаптивно для каждой области изображения с учетом распределения пространственных частот входного изображения и скорости движения каждой части.
Как показано на фиг.17, во втором варианте осуществления используется адаптивный многозвенный фильтр 20 нижних частот. На фиг.19 показана подробная схема адаптивного многозвенного фильтра нижних частот, содержащего множество фильтров LPF с каскадной структурой.
На фиг.19 показан пример, в который число каскадов равно 4, то есть четыре фильтра нижних частот, выполняющих процесс фильтрации текущего кадра. Как показано на фиг.19, четыре фильтра LPF 23, 26, 29 и 31 соединены в последовательную цепочку. Множество фильтров LPF 23, 26, 29 и 31 функционируют в качестве первого блока фильтров. Точно также для предшествующего кадра три фильтра LPF 22, 24 и 28 соединены в последовательную цепочку. Множество фильтров LPF 22, 24 и 28 функционируют как секционный блок фильтров. Фильтры LPF 22 и 23 используют одно и то же значение константы расстояния. Фильтры LPF 24 и 26 также настроены на использования одного и того же значения константы расстояния. Фильтры LPF 28 и 29 также используют одно и то же значение константы расстояния. Значение константы расстояния для каждого фильтра нижних частот LPFn (n=1, 2, 3, 4) устанавливается равным dn (n=1, 2, 3, 4) в соответствии с нижним числовым индексом. Чем больше нижний числовой индекс, тем больше установленное значение константы расстояния. То есть верхняя предельная пространственная частота частотного диапазона, который должен пропускаться, понижается в порядке возрастания нижнего числового индекса, то есть по мере того, как позиция фильтра становится ближе к выходу. Следовательно, значение константы расстояния может также рассматриваться как информация, которая определяет верхнюю предельную пространственную частоту для фильтрации.
Теперь будут описаны функции блоков, показанных на фиг.19.
Схема 21 задержки (DL) задерживает данные входного изображения на один кадр и выводит его. Фактически DL 21 может быть сформирована из запоминающего устройства FIFO для хранения одного кадра данных изображения. Когда текущим кадром данных изображения, введенных в адаптивный многокаскадный фильтр нижних частот 20, является А[i], DL 21 выводит предшествующий кадр А[i-1] данных изображения.
Фильтры LPF 22 и 23 фильтруют данные входного изображения в соответствии со значением d1 константы расстояния.
Фильтры LPF 24 и 26 принимают в качестве входных данных сигналы L1[i-1] и L1[i] от предыдущих фильтров LPF 22 и 23 и данные области AREA1, выведенные из компаратора 25 разности. Значение d2 константы расстояния для фильтров LPF 24 и 26 задается заранее. Фильтры LPF 24 и 26 соответственно фильтруют L1[i-1] и L1[i], соответствующие пикселам в области, представленной данными области AREA1, в соответствии со значением d2 константы расстояния. Хотя процесс фильтрации выполняется в этой области, диапазон, в котором данные изображения изменяются этим процессом, шире, чем область, определяемая значением d2 константы расстояния. Результаты фильтрации выводятся как L2[i-1] и L2[i].
Фильтры LPF 28 и 29 принимают в качестве входных данных сигналы L2[i-1] и L2[i] от фильтров LPF 24 и 26 и данные области AREA2, выведенные из компаратора разности 27. Значение d3 константы расстояния для фильтров LPF 28 и 29 задается заранее. Фильтры LPF 28 и 29 соответственно фильтруют L2[i-1] и L2[i], соответствующие пикселам в области, представленной данными области AREA2, в соответствии со значением d3 константы расстояния. Хотя процесс фильтрации выполняется в этой области, диапазон, в котором данные изображения изменяются этим процессом, шире, чем область, определяемая значением d3 константы расстояния. Результаты фильтрации выводятся как L3[i-1] и L3[i].
Фильтр LPF 31 принимает в качестве входных данных сигнал L3[i] от фильтра LPF 29 и данные области AREA3, выведенные из компаратора 30 разности. Значение d4 константы расстояния для фильтра LPF 31 задается заранее. Фильтр LPF 31 фильтрует L3[i], соответствующий пикселам в области, представленной данными области AREA3 в соответствии со значением d4 константы расстояния. Хотя процесс фильтрации выполняется в этой области, диапазон, в котором данные изображения изменяются этим процессом, шире, чем область, определяемая значением d4 константы расстояния. Результат фильтрации выводится как конечный результат L[i] адаптивной многокаскадной фильтрации фильтром 20 нижних частот.
Компаратор 25 разности принимает L1[i-1] и L1[i], вычисляет абсолютное значение разности для каждого пиксела и, основываясь на результате, вычисляет данные области AREA1. Для компаратора 25 разности значение C1 константы для определения задается. AREA1 являются данными матрицы с той же самой формой, что и L1. Данные, соответствующие пикселу, чье абсолютное значение разности больше или равно C1, определяются как "1". Данные, соответствующие пикселу, чье абсолютное значение разности меньше C1, определяются как "0".
Более конкретно, для каждого пиксела (x, y),
когда |L1[i](x,y)-L1[i-1](x,y)|≥C1,
AREA1(x,y)="1" и
когда |L1[i](x,y)-L1[i-1](x,y)|<C1,
AREA1(x,y)="0"
Данные области AREA1, определенные таким образом, выводятся компаратором 25 разности.
Компаратор 27 разности принимает L2[i-1] и L2[i], вычисляет абсолютное значение разности для каждого пиксела и, основываясь на результате, вычисляет данные области AREA2. Значение C2 константы для определения задается для компаратора 27 разности. AREA2 являются данными матрицы с той же самой формой, что и L2. Данные, соответствующие пикселу, чье абсолютное значение разности больше C2, определяются как "1". Данные, соответствующие пикселу, чье абсолютное значение разности меньше C2, определяются как "0".
Более конкретно, для каждого пиксела (x, y),
когда |L2[i](x,y)-L2[i-1](x,y)|≥C2,
AREA2(x,y)="1" и
когда |L2[i](x,y)-L2[i-1](x,y)|<C2,
AREA2(x,y)="0"
Данные области AREA2, определенные таким образом, выводятся компаратором 27 разности.
Компаратор 30 разности принимает L3[i-1] и L3[i], вычисляет абсолютное значение разности для каждого пиксела и, основываясь на результате, вычисляет данные области AREA3. Для компаратора 30 разности значение C3 константы для определения задается. AREA3 являются данными матрицы с той же самой формой, что и L3. Данные, соответствующие пикселу, чье абсолютное значение разности больше C3, определяются как "1". Данные, соответствующие пикселу, чье абсолютное значение разности меньше C3, определяются как "0".
Более конкретно, для каждого пиксела (x, y),
когда |L3[i](x,y)-L3[i-1](x,y)|≥C3,
AREA3(x,y)="1" и
когда |L3[i](x,y)-L3[i-1](x,y)|<C3,
AREA3(x,y)="0"
Данные области AREA3, определенные таким образом, выводятся компаратором 30 разности.
С учетом приведенного выше объяснения ниже будет описана работа адаптивного многокаскадного фильтра LPF 20 второго варианта осуществления, показанного на фиг.19.
Сначала будет кратко описана структура.
Фильтр LPF 23 всегда выполняет процесс фильтрации во всех областях каждого кадра. Если имеется область, где результат фильтрации фильтром LPF 23 недостаточен, процесс фильтрации выполняет фильтр LPF 26. Если все еще остается область, где фильтрация недостаточна, процесс фильтрации выполняет фильтр LPF 29 и затем фильтр LPF 31.
Достаточна ли фильтрация фильтром LPF в каждой области, определяется далее следующим образом.
Фильтры LPF 22, 24 и 28 фильтруют предшествующий кадр А[i-1] данных изображения. Разность между результатом фильтрации текущего кадра А[i] данных изображения и результатом фильтрации предшествующего кадра сравнивается с пороговым значением. Область, в которой разность больше порогового значения, определяется как область, в которой фильтрация фильтром LPF недостаточна. Напротив, область, в которой разность меньше или равна пороговому значению, определяется как область, в которой фильтрация фильтром LPF достаточна. Информация, представляющая область, определенную как имеющую недостаточную разность, посылается на фильтр LPF следующего каскада. Фильтр LPF следующего каскада выполняет процесс фильтрации в этой области. Адаптивный многокаскадный фильтр LPF 20 в этом варианте осуществления является фильтром LPF с 4 каскадами. Следовательно, даже если результат фильтрации в конце концов недостаточен, результат фильтрации, полученный фильтром LPF 31, выводится как данные изображения L[i], которые являются выходными данными адаптивного многокаскадного фильтра LPF 20.
Процесс фильтрации для этого варианта осуществления будет описан ниже в соответствии с последовательностью обработки.
Сначала входное изображение А[i] и непосредственно предшествующий кадр А[i-1] данных изображения проходят через фильтры LPF 22 и 23 соответственно. То есть
L1[i]=LPF1(А[i])
L1[i-1]=LPF1(А[i-1])
Фактически L1[i-1] уже вычислен в процессе вывода непосредственно предшествующего кадра. Следовательно, вычисленные данные могут быть запомнены и загружены из запоминающего устройства.
Компаратор 25 разности вычисляет абсолютное значение разности между L1[i-1] и L1[i], сравнивает абсолютное значение с пороговым постоянным значением C для каждого пиксела (x, y), чтобы создать данные области AREA1, и посылает его на фильтры LPF 24 и 26.
Фильтры LPF 24 и 26 выполняют процесс LPF2 фильтрации данных L1[i-1] и L1[i], посланных из предыдущего потока, в области, представленной AREA1. Этот процесс может быть представлен, например, следующим образом:
L2=L1-(AREA1·L1)+LPF2((AREA1·L1))
(AREA1·L1) означает операцию вывода данных изображения, в которых данные пиксел, чья составляющая в AREA1 равна "1", являются такими же, как в данных L1 изображения, и данные пиксел, чья составляющая в AREA1 равна "0", остаются равными "0". Таким образом, полученные L2[i] и L2[i-1] посылаются на фильтры LPF 28 и 29.
Фильтры LPF 28 и 29 выполняют процесс LPF3 фильтрации данных L2[i-1] и L2[i], посланных из предыдущего потока, в области, представленной AREA2. Этот процесс может быть представлен, например, следующим образом:
L3=L2-(AREA2·L2)+LPF3((AREA2·L2))
(AREA2·L2) означает операцию вывода данных изображения, в которых данные пиксел, чья составляющая в AREA2 равна "1", являются такими же, как данные в данных L2 изображения, и данные пиксел, чья составляющая в AREA2 равна "0", остаются равными "0". Полученные таким образом данные L3[i] посылаются на фильтр LPF 31.
Фильтр LPF 31 выполняет процесс LPF4 фильтрации посланных данных L3[i] в области, представленной AREA3. Этот процесс может быть представлен, например, следующим образом:
L4=L3-(AREA3·L3)+LPF4((AREA3·L3))
(AREA3·L3) означает операцию создания данных изображения, в которых данные пиксел, чья составляющая в AREA3 равна "1", являются такими же, как в данных L3 изображения, и данные пиксел, чья составляющая в AREA3 равна "0", остаются равными "0".
Таким образом полученные данные L[i] выводятся в качестве данных изображения, являющихся выходными данными адаптивного многокаскадного фильтра LPF 20.
Адаптивный многокаскадный LPF 20, соответствующий второму варианту осуществления, содержит первый блок фильтров (LPF 23, 26, 29 и 31) и второй блок фильтров (LPF 22, 24 и 28). Вслед за предшествующим этапом вычисляется абсолютное значение разности между данными изображения, полученными n-ми соответствующими фильтрами первого и второго блоков фильтров. Если существует область, в которой абсолютное значение разности меньше или равно заранее заданному пороговому значению Cn, то только эта область подвергается обработке с помощью LPF следующего каскада. Таким образом, окончательно формируются данные изображения, в которых абсолютная величина разности меньше заданного порогового значения во всех областях и все области подвергаются только минимальному и необходимому процессу фильтрации. Эти данные изображения выводятся как низкочастотные данные изображения L[i] интересующего кадра. В этом варианте осуществления описан пример, в котором Cn может быть установлено для каждого каскада. Однако для всех пороговых значений Cn может быть установлено единое общее значение C. Это реальный способ, с помощью которого также можно получить достаточный эффект.
В примере, описанном во втором варианте осуществления, адаптивный многокаскадный фильтр LPF 20, показанный на фиг.17, используется вместо LPF 1 в первом варианте осуществления, показанном на фиг.1. Однако, как показано на фиг.18, адаптивный многокаскадный фильтр LPF второго варианта осуществления и вычитающее устройство могут быть объединены, чтобы образовать HPF вместо показанного на фиг.6 HPF, соответствующего предшествующему уровню техники.
Во втором варианте осуществления используется осуществление LPF с 4 каскадами. Характеристика может быть дополнительно улучшена за счет использования большего количества каскадов. Фактически, правильно подобранное количество каскадов предпочтительно устанавливается с учетом, например, масштаба схемы и расчетной нагрузки. Например, в самом малом масштабе количество каскадов равно 2, как показано на фиг.20. Даже эта схема может обеспечить лучшую функцию и действие, чем та, которая соответствует предшествующему уровню техники.
Адаптивный многокаскадный фильтр нижних частот предпочтительно выполняет процесс фильтрации в соответствии с частью изображения (например, частью с быстрым движением или частью с медленным движением). Однако процесс фильтрации может быть выполнен с полным изображением.
На фиг.31 показан другой пример, в котором процесс фильтрации выполняется для всего изображения.
DL 21 задерживает данные входного изображения на один кадр и выводит их. Схема DL 21 может быть выполнена, например, на основе запоминающего устройства FIFO для запоминания одного кадра данных изображения, например. Когда текущим кадром данных изображения, введенный в адаптивный многокаскадный фильтр LPF 20, является А[i], DL 21 выводит предшествующий кадр А[i-1] данных изображения.
Фильтры LPF 22 и 23 всегда активны и фильтруют данные входного изображения в соответствии со значением d1 константы расстояния.
Фильтры LPF 24 и 26 активируются, когда сигнал определения dif_1 от компаратора 25 разности равен "1", чтобы фильтровать данные изображения, поступающие от предшествующих фильтров LPF 22 и 23, используя значение d2 константы расстояния. Если сигнал определения dif_1 от компаратора 25 разности равен "0", фильтры LPF 24 и 26 не выполняют процесс фильтрации.
Фильтры LPF 28 и 29 активируются, когда сигнал определения dif_2 от компаратора 27 разности равен "1", чтобы фильтровать данные изображения, поступающие от предшествующих фильтров LPF 24 и 26, используя значение d3 константы расстояния. Если сигнал определения dif_2 от компаратора 27 разности равен "0", фильтры LPF 28 и 29 не выполняют процесс фильтрации.
Фильтр LPF 31 активируется, когда сигнал определения dif_3 от компаратора 30 разности равен "1", чтобы фильтровать данные изображения, поступающие от предшествующих фильтров LPF 28 и 29, используя значение d4 константы расстояния. Если сигнал определения dif_3 от компаратора 30 разности равен "0", фильтр LPF 31 не выполняет процесс фильтрации.
Пусть X1 и X2 - данные пиксел, выводимые от фильтров LPF 22 и 23. Компаратор 25 разности вычисляет абсолютное значение |X1-X2| разности, сравнивает абсолютное значение с пороговым значением C1 и выводит результат сравнения в качестве сигнала определения dif_1.
Более конкретно,
когда условие |X1-X2|≤C1 удовлетворено, dif_1="0", и
когда условие |X1-X2|>C1 удовлетворено, dif_1="1"
Это также применяется к компараторам 27 и 30 разности. Компаратор 27 разницы использует пороговое значение C2 и выводит результат определения как dif_2. Компаратор 30 разности использует пороговое значение C3 и выводит результат определения как dif_3.
Переключатель SW1 включает вывод "1", когда сигнал определения dif_1 от компаратора 25 разности равен "1", и вывод "0", когда сигнал определения dif_1 равен "0". Это также относится к переключателям SW2 к SW4.
Учитывая приведенное выше объяснение, далее будет описана работа адаптивного многокаскадного фильтра LPF 20, показанного на фиг.31, который выполняет процесс фильтрации для полного изображения.
Сначала будет кратко описана структура.
Фильтр LPF 23 всегда выполняет процесс для каждого кадра. Если результат фильтрации с помощью LPF 23 недостаточен, процесс фильтрации выполняет фильтр LPF 26. Если результат фильтрации все еще недостаточен, процесс фильтрации выполняет фильтр LPF 29 и затем LPF 31.
Достаточна ли фильтрация фильтром LPF, определяется далее следующим образом.
Фильтры LPF 22, 24 и 28 фильтруют предшествующий кадр А[i-1] данных изображения. Разность между результатом фильтрации текущего кадра А[i] данных изображения и результатом фильтрации предшествующего кадра сравнивается с пороговым значением. Если разность больше порогового значения, принимается решение, что фильтрация фильтром LPF недостаточна. С другой стороны, если разность меньше или равна пороговому значению, принимается решение, что фильтрация каскадом фильтра LPF достаточна и результат процесса фильтрации этого каскада выводится как данные изображения L[i], являющиеся выходными данными адаптивного многокаскадного фильтра LPF 20. Адаптивный многокаскадный фильтр LPF 20 является 4-каскадным фильтром LPF. Следовательно, если результат определения dif_3 оконечного компаратора 30 разности равен "1", результат фильтрации, полученный фильтром LPF 31, выводится как данные изображения L[i], которые являются выходными данными адаптивного многокаскадного фильтра LPF 20.
Процесс фильтрации для этого варианта осуществления будет описан ниже в соответствии с последовательностью обработки.
Сначала входное изображение А[i] и непосредственно предшествующий кадр А[i-1] данных изображения проходят через фильтры LPF 22 и 23 соответственно. То есть
L1[i]=LPF1(А[i])
L1[i-1]=LPF1(А[i-1])
Фактически L1[i-1] уже вычислен в процессе вывода непосредственно предшествующего кадра. Следовательно, вычисленные данные могут быть запомнены и загружены из запоминающего устройства.
Компаратор 25 разности вычисляет абсолютное значение разности между L1[i-1] и L1[i] и сравнивает абсолютное значение с пороговым постоянным значением C1.
Когда |L1[i]-L1[i-1]|<C1, результат фильтрации L1[i] текущего кадра достаточен. Следовательно, компаратор 25 разности выводит сигнал определения dif_1="0". Далее переключатель SW1 включает выходной вывод "0", чтобы вывести L1[i] как выходные данные L[i] адаптивного многокаскадного фильтра LPF 20. Когда сигнал определения dif_1="0", компаратор 27 разности следующего каскада безоговорочно устанавливает сигнал определения dif_2 на "0". Это также относится к компаратору 30 разности.
С другой стороны, когда |L1[i]-L1[i-1]|≥C1, результат фильтрации L1[i] текущего кадра недостаточен. Следовательно, компаратор 25 разности выводит сигнал определения dif_1="1". Это активирует фильтры LPF 24 и 26. Переключатель SW1 включает выходной вывод "1". Фильтры LPF 24 и 26 фильтруют L1 [i1] и L1 [i-1] соответственно.
Компаратор 27 разности вычисляет абсолютное значение разности между выходными данными L2[i] и L2[i-1] фильтров LPF 24 и 26 и сравнивает абсолютное значение с постоянным пороговым значением C2.
Когда |L2[i]-L2[i-1]|<C2, результат фильтрации L2[i] текущего кадра достаточен. Следовательно, компаратор 27 разности выводит сигнал определения dif_2="0". Далее переключатель SW2 включает выходной вывод "0", чтобы вывести L2[i] в качестве выходного результата L[i] адаптивного многокаскадного фильтра LPF 20.
С другой стороны, когда |L2[i]-L2[i-1]|≥C2, результат фильтрации L2[i] интересующих пиксел текущего кадра недостаточен. Следовательно, компаратор 27 разности выводит сигнал определения dif_2="1". Это активирует фильтры LPF 28 и 29. Переключатель SW2 включает выходной вывод "1". Фильтры LPF 28 и 29 фильтруют L2[i1] и L2[i-1] соответственно.
Компаратор 30 разности вычисляет абсолютное значение разности между выходными сигналами L3[i] и L3[i-1] фильтров LPF 28 и 29 и сравнивает абсолютное значение с постоянным пороговым значением C3.
Когда |L3[i]-L3[i-1]|<C3, результат фильтрации L3[i] текущего кадра достаточен. Следовательно, компаратор 30 разности выводит сигнал определения dif_3="0". Далее переключатель SW3 включает выходной вывод "0", чтобы вывести L3[i] в качестве выходного результата L[i] адаптивного многокаскадного фильтра LPF 20.
С другой стороны, когда |L3[i]-L3[i-1]|≥C3, результат фильтрации L2[i] текущего кадра недостаточен. Следовательно, компаратор 30 разности выводит сигнал определения dif_3="1". Это активирует фильтр LPF 31. Каждый из переключателей SW3 и SW4 включает выходной вывод "1", чтобы вывести результат L4[i] процесса фильтрации фильтром LPF 31 как выходной сигнал L[i] адаптивного многокаскадного фильтра LPF 20.
В результате только один из выходных сигналов фильтров LPF 23, 26, 29 и 31 выводится в качестве выходного сигнала L[i] адаптивного многокаскадного фильтра LPF 20.
Описанный выше процесс может быть выражен следующим образом.
Адаптивный многокаскадный фильтр LPF 20 в соответствии со вторым вариантом осуществления содержит первый блок фильтров (LPF 23, 26, 29 и 31) и второй блок фильтров (LPF 22, 24 и 28). Последовательно после предыдущего каскада вычисляется абсолютное значение разности между данными изображения, полученными n-ными соответствующими фильтрами первого и второго блоков фильтров. Абсолютное значение разности сравнивается с заданным порогом Cn, чтобы определить, является ли разность меньше или равной пороговому значению Cn во всех областях. Когда определение получено впервые (определено, что разность меньше Cn во всех областях), данные изображения, полученные n-ым фильтром первого блока фильтров, выводятся в качестве низкочастотных данных изображения L[i] интересующего кадра.
Работа адаптивного многокаскадного фильтра LPF, показанного на фиг.31, который выполняет процесс фильтрации всего изображения, была описана выше. На фиг.32 показана блок-схема адаптивного многокаскадного фильтра LPF, который выполняет процесс фильтрации для всего изображения, когда коэффициент=2.
Как описано выше, в соответствии со вторым вариантом осуществления возможно смягчить первую и вторую проблемы.
<Третий вариант осуществления>
В третьем варианте осуществления будет описано решение второй описанной выше проблемы.
В описанном выше втором варианте осуществления значение d константы расстояния для фильтра LPF соответственно управляется, чтобы не позволить стать коэффициенту высокочастотной составляющей чрезмерно высоким. То есть тем самым предотвращается насыщение уровень яркости дисплея (то есть математически SH[i] ≥ 100% или SH[i]< 0).
Третий вариант осуществления предлагает способ предотвращения проблемы, даже когда насыщение уровня яркости дисплея (то есть математически SH[i] ≥ 100% или SH[i]< 0) все еще имеет место после описанного выше процесса. То есть SH[i] и SL[i], которые уже вычислены, корректируются снова, чтобы предотвратить любую проблему.
На фиг.21 и 22 показан случай, в котором способ по варианту осуществления применяется к предшествующему уровню техники, показанному на фиг.6.
На предшествующем уровне техники, показанном на фиг.6, SH[i] и SL[i] могут быть выражены следующим образом:
L[i]=LPF(А[i])
H[i]=А[i]-L[i]
SH[i]=L[i]+2H[i]
SL[i]=L[i]
В третьем варианте осуществления коррекция, которая будет описана позже, выполняется для SH[i] и SL[i], полученных вычислениями, проведенными до этого пункта, создавая, таким образом, скорректированные изображения SH_0[i] и SL_0[i]. Значения SH_0[i] и SL_0[i] представляют уровни яркости, которые фактически должны отображаться. То есть как SH_0[i], так и SL_0[i] являются изображениями, которые скорректированы, чтобы фактически принимать значение от 0% до 100%. Когда значение пиксел выражается 8 битами, "100%" является верхним пределом "255", выраженным 8 битами, и "0%" является буквально нижним пределом "0" из значений, выражаемых 8 битами.
Сначала здесь будут определены параметры, показанные на фиг.21 и 22. Когда значение пиксела в пространственных высокочастотных данных изображения математически превышает 100%, превышающая часть (избыточная часть) определяется как "SH_Over100". Если SH - математически отрицательно, то есть если 2H имеет отрицательное значение и абсолютное значение 2H больше L, отрицательная часть, меньшая нижнего предельного значения, определяется как
"-SH_Under0".
В третьем варианте осуществления, как показано на фиг.21, когда пиксел в пространственных высокочастотных данных изображения имеет SH_Over100, SH_Over100 вычитается из пиксела и прибавляется к пикселу в той же самой позиции пространственных низкочастотных данных изображения. То есть SH_Over100 перемещается. Точно также, как показано на фиг.22, чтобы компенсировать -SH_Under0, то же самое значение перемещается из второго субкадра в первый субкадр.
Эта операция может фактически быть выражена, например, на языке C следующим образом:
если (SH>100){
SH_over100=SH-100; SH_under0=0; SH=100;}
иначе, если (SH<0) {
SH_over100=0; SH_under0=-SH; SH=0;}
иначе {
SH_over100=0; SH_under0=0;}
SH_0[i]=SH[i]-SH_over100+SH_under0;
SL_0[i]=SL[i]+SH_over100-SH_under0;
При наличии этого процесса, если уровень яркости дисплея приходит в насыщение (то есть если математически SH[i]≥100% или если SH[i]<0), описанная выше коррекция может быть выполнена, чтобы заменить данные на SH_0[i] и SL_0[i]. Это делает возможным предотвратить эту проблему в изображении.
Фиг.23 и 24 показывают случай, в котором способ, описанный в третьем варианте осуществления, применяется к первому варианту осуществления, показанному на фиг.1.
В первом варианте осуществления, показанном на фиг.1, SH[i] и SL[i] могут быть выражены следующим образом:
L[i]=LPF А([i])
H[i]=А[i]-L[i]
SH[i]=L[i]+2H[i]
SL[i]={L[i]+L[i-1]}/2
В третьем варианте осуществления процесс коррекции выполняется для SH[i] и SL[i], полученных путем вычислений, произведенных до этого пункта, получая, таким образом, результаты SH_0[i] и SL_0[i]. Значения SH_0[i] и SL_0[i] представляют уровни яркости, которые должны фактически отображаться, и принимают значение 0%-100%.
Сначала определим параметры, показанные на фиг.23 и 24. Когда данные изображения SH (=L+2H) математически превышают 100%, фактически превышающая часть определяется как "SH_Over100". Если SH - математически отрицательно (то есть если 2H отрицательно и его абсолютное значение больше L), фактическая отрицательная часть определяется как "-SH_Under0".
В третьем варианте осуществления, как показано на фиг.23, половина SH_Over100 перемещается из первого субкадра во второй субкадр. Дополнительно остальная половина перемещена в непосредственно предшествующий второй субкадр.
Точно так же, как показано на фиг.24, чтобы компенсировать -SH_Under0, значение, соответствующее половине значения, перемещается из второго субкадра в первый интересующий субкадр. Дополнительно значение, соответствующее остальной половине, перемещается из непосредственно предшествующего второго субкадра в первый интересующий субкадр.
Эта операция может фактически быть выражена, например, на языке C следующим образом:
если (SH>100) {
SH_over100=SH-100; SH_under0=0; SH=100;}
иначе, если (SH<0) {
SH_over100=0; SH_under0=-SH; SH=0;}
иначе {
SH_over100=0; SH_under0=0;}
SH_0[i]=SH[i]-SH_over100+SH_under0;
SL_0[i]=SL[i]+(1/2)·SH_over100-(1/2)·SH_under0;
SL_0[i-1]=SL[i]+(1/2)·SH_over100-(1/2)·SH_under0;
При наличии этого процесса, если уровень яркости дисплея приходит в насыщение (то есть если математически SH[i]≥100% или если SH[i]<0), описанная выше коррекция может быть выполнена, чтобы заменить данные на SH_0[i] и SL_0[i]. Это делает возможным предотвратить эту проблему в изображении. Даже когда применяется способ, описанный в этом варианте осуществления, временной центр тяжести пространственной высокочастотной составляющей и временной центр тяжести пространственной низкочастотной составляющей не изменяются. Следовательно, при прослеживании в полученном изображении не происходит никакого смещения между позицией отображения пространственной высокочастотной составляющей и позицией отображения пространственной низкочастотной составляющей. Поэтому возможно предотвратить любую ошибку операции, вызванную насыщением уровня яркости, при предотвращении, в то же время, искажения типа размытого хвоста в изображении, наблюдаемом при прослеживании.
<Четвертый вариант осуществления>
В четвертом варианте осуществления будет описан пример решения описанных выше первой и второй проблем.
В четвертом варианте осуществления входное изображение разделяется на множество пространственных частотных составляющих и уровень отображения распределяется на множество субкадров, так чтобы временные центры тяжести составляющих совпадали. Это улучшает размывание при движении, двойное размывание и мерцание. В описанных выше вариантах осуществления с первого по третий входной кадр подвергается преобразованию с удвоением частоты кадров (то есть делится на два субкадра) и пространственное разделение по частоте выполняется, чтобы разделить данные изображения на пространственную высокочастотную составляющую и пространственную низкочастотную составляющую.
Пусть N будет коэффициентом увеличения числа кадров, а R будет числом полос частот для разделения по пространственной частоте. В описанных выше вариантах осуществления частота кадров удваивается (N=2) или диапазон пространственных частот делится на две полосы (R=2), то есть на высокочастотную составляющую и низкочастотную составляющую.
Однако настоящее изобретение не ограничивает число субкадров (то есть не ограничивает N в "N×(частота кадров)" до N, равного "2"). При пространственном разделении диапазона частот настоящее изобретение также не ограничивает число полос (то есть не ограничивает R в "R полос" до R, равного "2").
В этом варианте осуществления будут описаны условия для получения того же самого эффекта, как описано выше, когда частота кадров входного изображения умножается на N (или входной кадр делится на N субкадров) и входное изображение разделено на R полос пространственных частот. N и R - положительные целые числа больше или равные 2.
N не ограничивается 2 и может быть 3 или больше, чтобы получить тот же самый эффект. В любом случае, большое число N предпочтительно для удовлетворения условия настоящего изобретения, потому что степень свободы при распределении является высокой.
Число R выбирается таким, что когда входное изображение делится на R полос пространственных частот, две смежные полосы (например, J и (J+1)) всегда имеют соотношения, описанные выше для R=2. В этом случае одни и те же соотношения сохраняются во всех полосах от первой полосы до полосы R. То есть составляющие полосы R делаются такими, чтобы иметь соотношения, при которых временное распределение составляющих изображения в полосе уменьшается в убывающем порядке пространственных частот (другими словами, временное распределение становится большим в восходящем порядке пространственных частот) и временные центры тяжести составляющих всех полос совпадают. При этом достигается эффект настоящего изобретения, то есть эффект улучшения размывания при движении, предотвращение мерцания и снижение искажения типа размытого хвоста. То есть в настоящем изобретении, даже когда N и R представлены в обобщенном виде, достигается тот же самый эффект, что и в описанных выше схемах с N=2 и R=2.
При разделении пространственных частот количество полос не ограничивается. В четвертом варианте осуществления N=5. Это эквивалентно процессу преобразования, например, частоты кадров изображения, имеющего частоту кадров 24 Гц (обычно соответствует движущемуся изображению в кинофильмах), в 5-кратную частоту кадров 120 Гц. Число полос R для примера будет взято равным R=3, что делает объем схемы и вычислений не столь большими. То есть будет описан пример, в котором пространственная частота делится на три полосы: высокие, средние и низкие.
На фиг.26 представлена блок-схема четвертого варианта осуществления. На фиг.25 показана коррекция интенсивностей (коэффициенты умножения) уровня отображения диапазона пространственных частот каждого субкадра в соответствии с четвертым вариантом осуществления.
Ниже будет описана работа схемы, показанной на фиг.26. Фильтр 40 принимает данные изображения А[i] одного кадра с частотой кадров 24 Гц. Фильтр 40 разделяет данные входного изображения на три пространственных частотных составляющих в полосах частот H, M, и L, основанных на двух значениях константы расстояния d1 и d2 (например, d1=3 пиксела, и d2=8 пиксел). Составляющие временно запоминаются в устройствах 42-44 запоминания кадров.
Схема 41 пятикратного умножения сигнала кадровой синхронизации умножает в пять раз частоту сигнала кадровой синхронизации входного изображения А[i], чтобы создать и вывести сигнал clk5.
Каждый из переключателей 45 и 46 устанавливается в исходное состояние сигналом кадровой синхронизации изображения А[i] и включает выходной вывод в порядке (1)→(2)→(3)→(4)→(5) в соответствии с clk5.
H-составляющая, временно запомненная в устройстве 42 запоминания кадров, считывается пять раз в соответствии с clk5 и посылается на переключатель 45. Переключатель 45 подключается к выходному выводу (1) на первом периоде clk5. Затем выходной вывод переключается к выводам (2), (3), (4) и (5) в указанном порядке. M-составляющая, запомненная в устройстве 43 запоминания кадров, также считывается пять раз. Выход переключателя 46 последовательно переключается в положения от (1) до (5). L-составляющая, временно запомненная в устройстве 44 запоминания кадров, также считывается пять раз.
Умножители GH1-GH5, которые умножают высокочастотные составляющие на свои коэффициенты усиления {0, 0,5, 4,0, 0,5, 0}, показанные на фиг.25, установлены непосредственно после выходных выводов переключателя 45.
Точно так же умножители GM1-GM5, которые умножают M-составляющие на свои коэффициенты усиления {0, 1,5, 2,0, 1,5, 0}, показанные на фиг.25, установлены непосредственно после выходов переключателя 46.
То есть при считывании составляющей N раз (в данном варианте осуществления N=5), коэффициент усиления (коэффициент умножителя) постепенно становится большим. Коэффициент усиления достигает максимума в промежуточной точке времени (в данном варианте осуществления - на третий раз) и затем постепенно становится малым.
Умножитель, использующий коэффициент усиления {1, 1, 1, 1, 1} предусмотрен непосредственно после устройства 44 запоминания кадров. Коэффициент усиления низкочастотной составляющей не меняется. Следовательно, можно обойтись одним умножителем, как показано на фиг.26.
Фактически после устройства 44 запоминания кадров необходимы одни и те же схемы, такие как переключатели 45 и 46 и последующие умножители. Однако схемы не показываются, поскольку коэффициент в этом случае не изменяется.
Сумматоры 47-49 суммируют умноженные данные изображения. В результате S1[i], S2[i], S3[i], S4[i] и S5[i] выводятся на первом-пятом периодах clk в указанном порядке и отображаются, что представляется следующим образом:
S1[i]=L[i]
S2[i]=L[i]+1,5M[i]+0,5Н[i]
S3[i]=L[i]+2M[i]+4H[i]
S4[i]=L[i]+1,5M[i]+0,5Н[i]
S5[i]=L[i]
(где [i] - номер кадра соответствующего входного изображения А[i]).
В настоящем варианте осуществления множество составляющих, соответствующих полосам пространственных частот, установлены так, что временное распределение становится меньшим в порядке убывания пространственной частоты (другими словами, временное распределение становится больше в порядке возрастания пространственной частоты), и временные центры тяжести всех составляющих совпадают, как описано выше. Фиг.25 соответствует этим условиям. Коэффициенты, показанные на фиг.25, симметричны с двух сторон для всех H-, M- и L-составляющих. Временной центр тяжести расположен в центре (третий субкадр) и временные центры тяжести всех составляющих совпадают. Концентрация веса на части вблизи промежуточного кадра наиболее заметна среди коэффициентов H-составляющей. Отношения степени концентрации представляются как H>M>L. Что касается L-составляющей, то вес равномерен. То есть, как можно видеть, временное распределение становится меньшим в порядке убывания пространственной частоты (большим в порядке возрастания пространственной частоты). Временное распределение может быть выражено подробно описанным далее способом, используя пример матрицы коэффициентов, показанный на фиг.25. Отношение H-коэффициента к M-коэффициенту увеличивается к третьему субкадру в центре и становится максимальным в третьем субкадре. Отношение M-коэффициента к L-коэффициенту также увеличивается к третьему субкадру в центре и становится максимальным в третьем субкадре. Отношение между L- и M-коэффициентами изменяется также. На фиг.25 показан пример матрицы коэффициентов, которая может быть обобщена таким образом.
При таком изображении, когда объект, который перемещается на изображении, прослеживается, H-, M- и L-составляющие наблюдаемого изображения не имеют пространственного смещения. Следовательно, наблюдается изображение, в котором отсутствует искажение типа ореола или размытого хвоста.
Выше были описаны четыре варианта осуществления настоящего изобретения. В вариантах осуществления специально не упоминается место назначения выходного сигнала каждого окончательно полученного кадра с умноженной на N частотой. Местом назначения выходного сигнала может быть устройство отображения удерживающего типа или импульсного типа. Место назначения не ограничивается устройством отображения. Вместо этого, данные могут запоминаться на носителе данных типа DVD-диска или в запоминающем устройстве типа жесткого диска в виде файла движущегося изображения.
Подобно описанной выше модификации первого варианта осуществления, второй и последующие варианты осуществления также позволяют реализовывать эквивалентный процесс с помощью компьютерной программы.
Обычно компьютерная программа хранится на читаемом компьютером носителе данных типа CD-ROM. Носитель данных устанавливается в считывающее устройство (например, привод CD-ROM) компьютера и программа делается исполняемой программой путем копирования или установки ее в систему. Следовательно, такой читаемый компьютером носитель данных также содержится в настоящем изобретении.
Хотя настоящее изобретение было описано со ссылкой на примеры вариантов осуществления, следует понимать, что изобретение не ограничивается раскрытыми примерами вариантов осуществления. Объем, определяемый приведенной далее формулой изобретения, должен сочетаться с самой широкой интерпретацией, чтобы охватывать все такие модификации и эквивалентные структуры и функции.
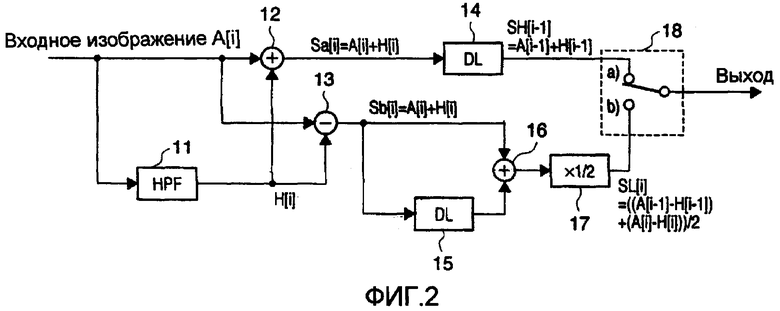
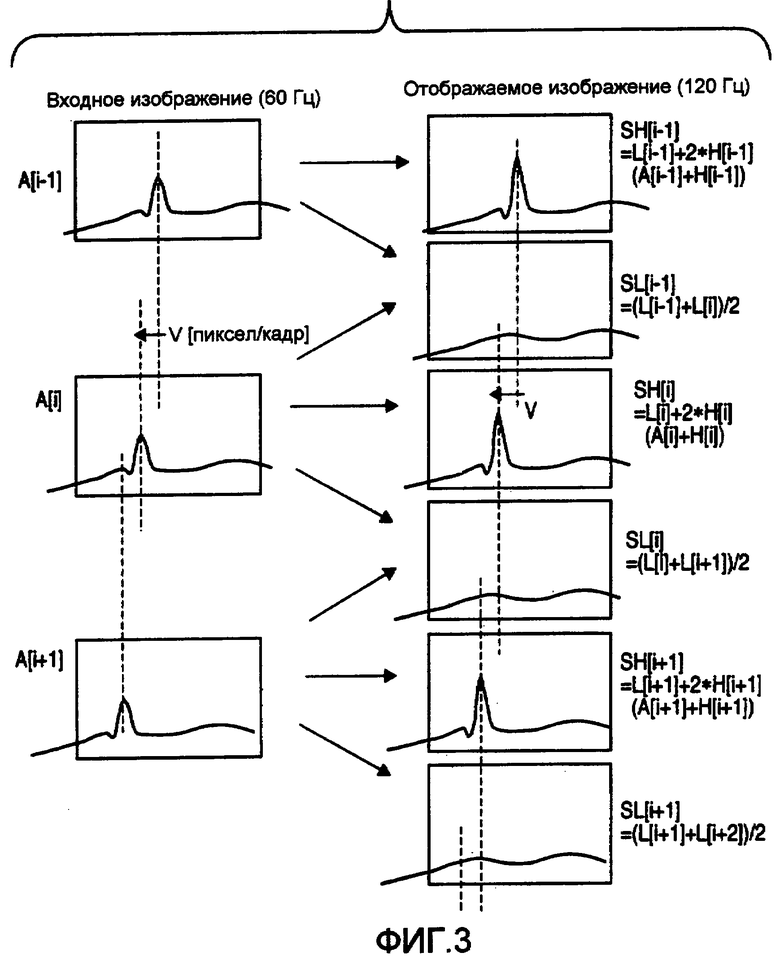

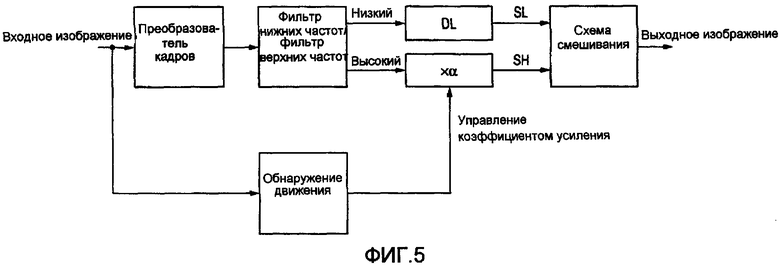
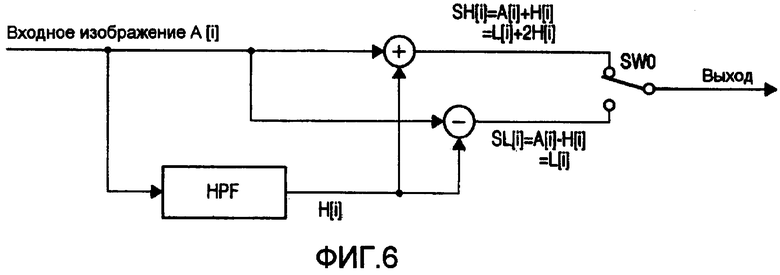

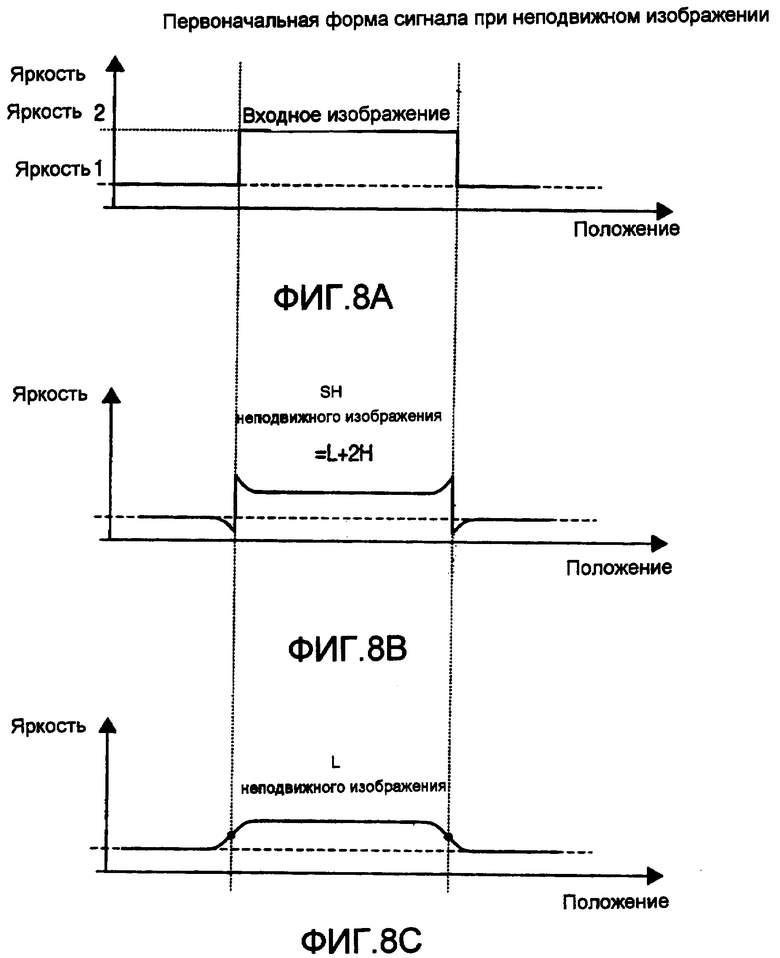
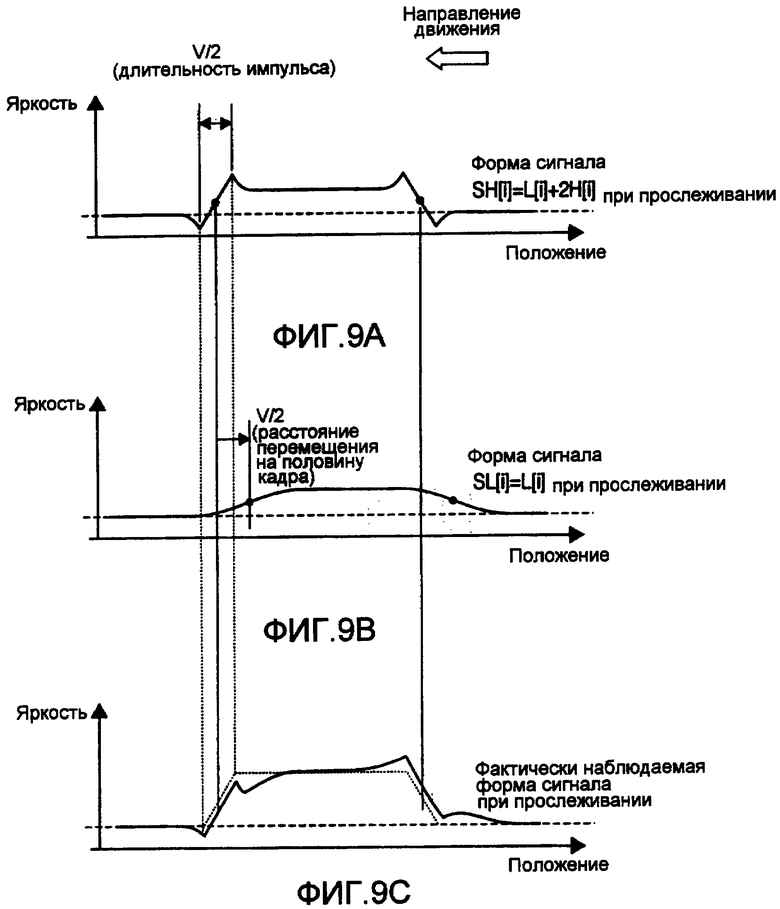
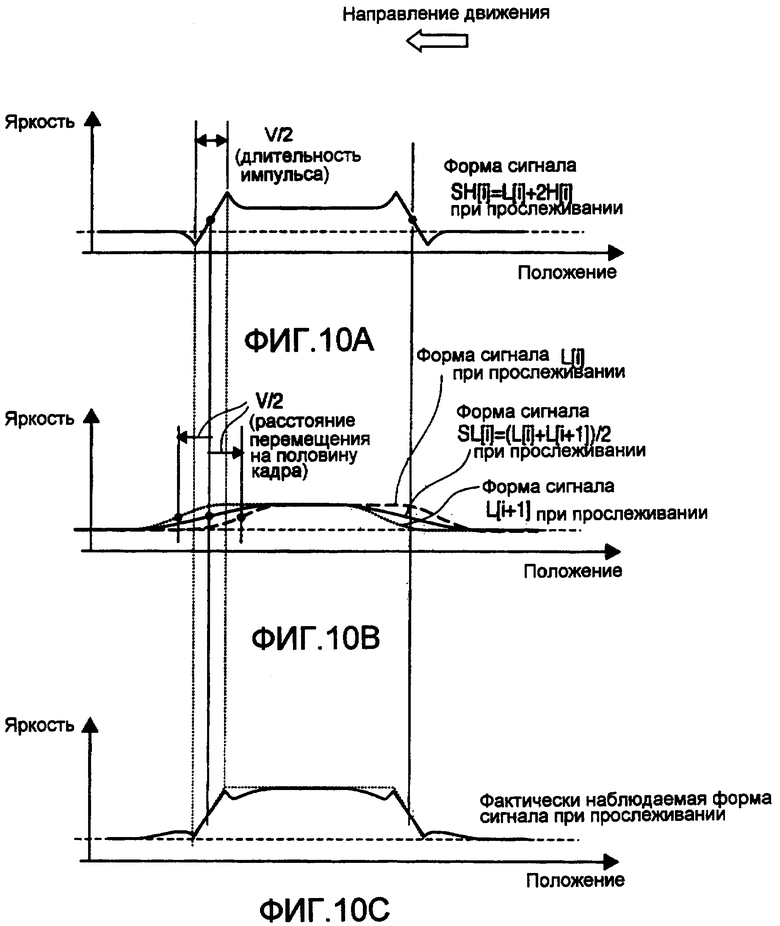

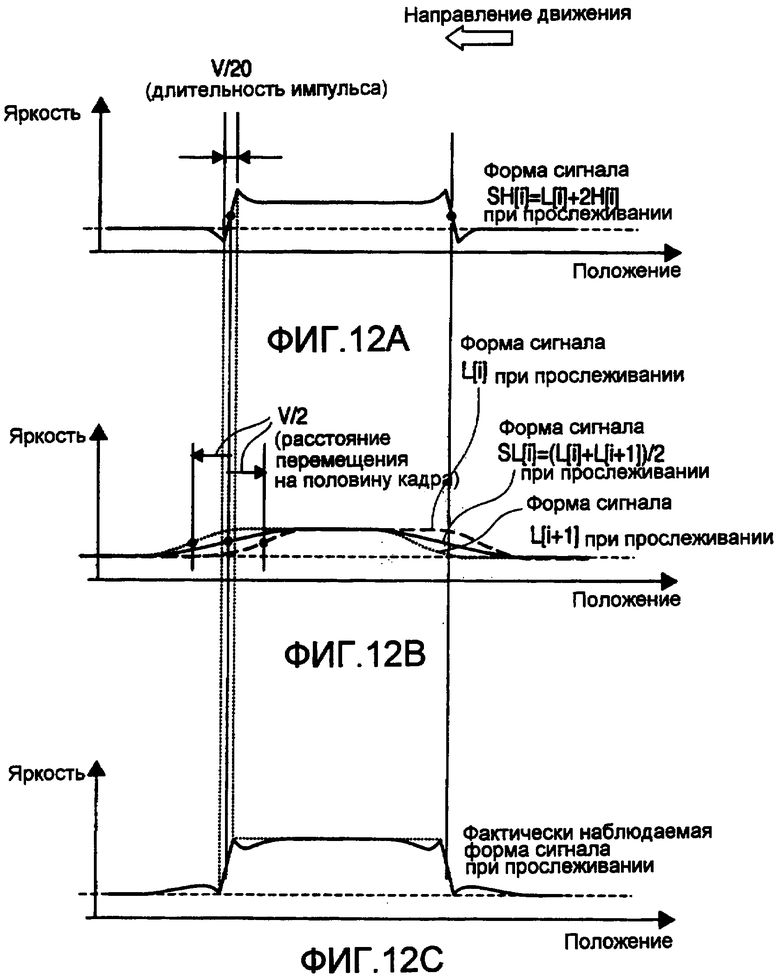

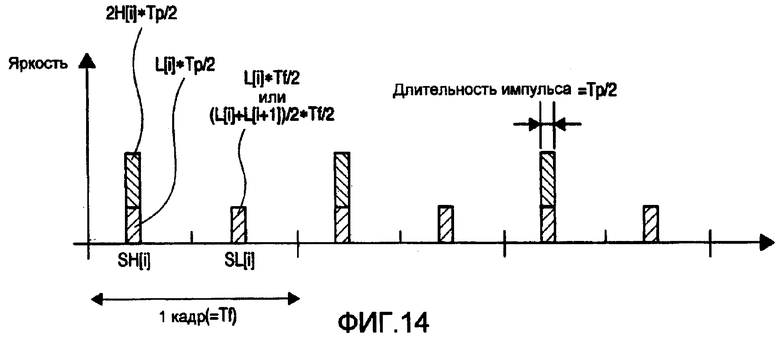
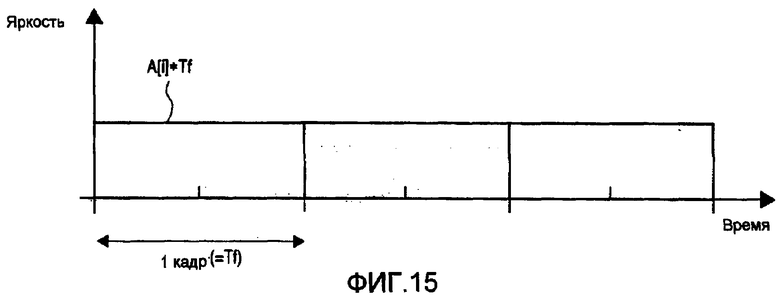
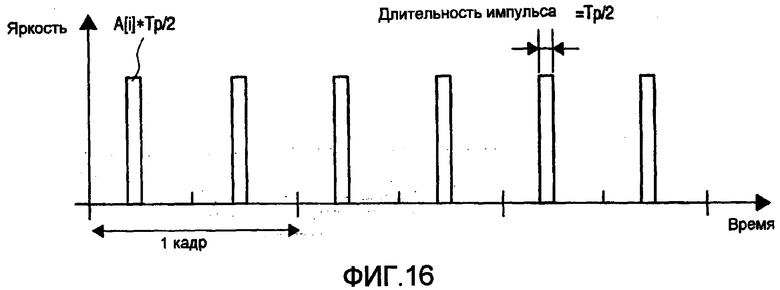




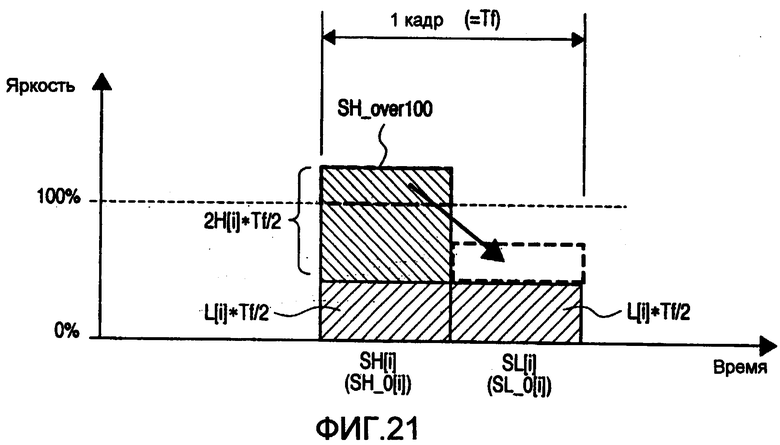


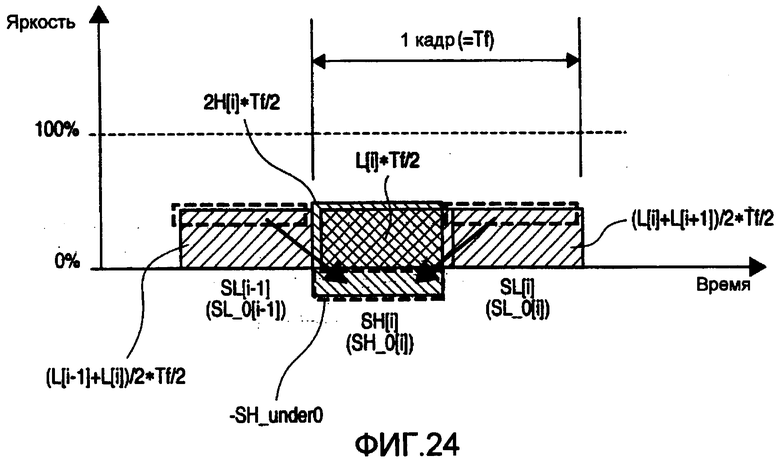
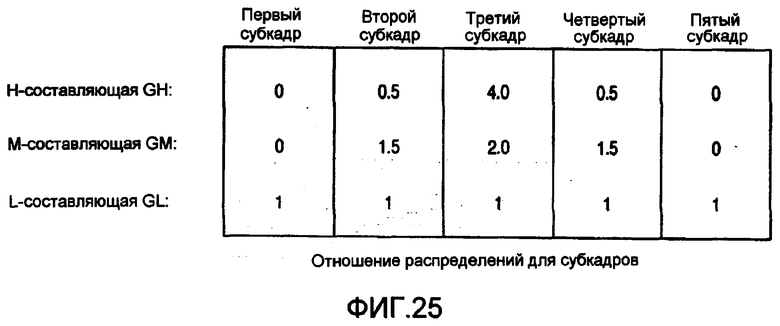
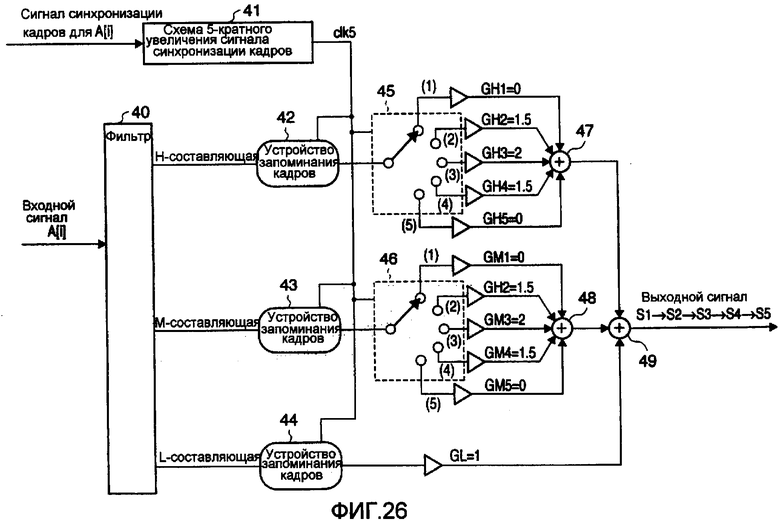
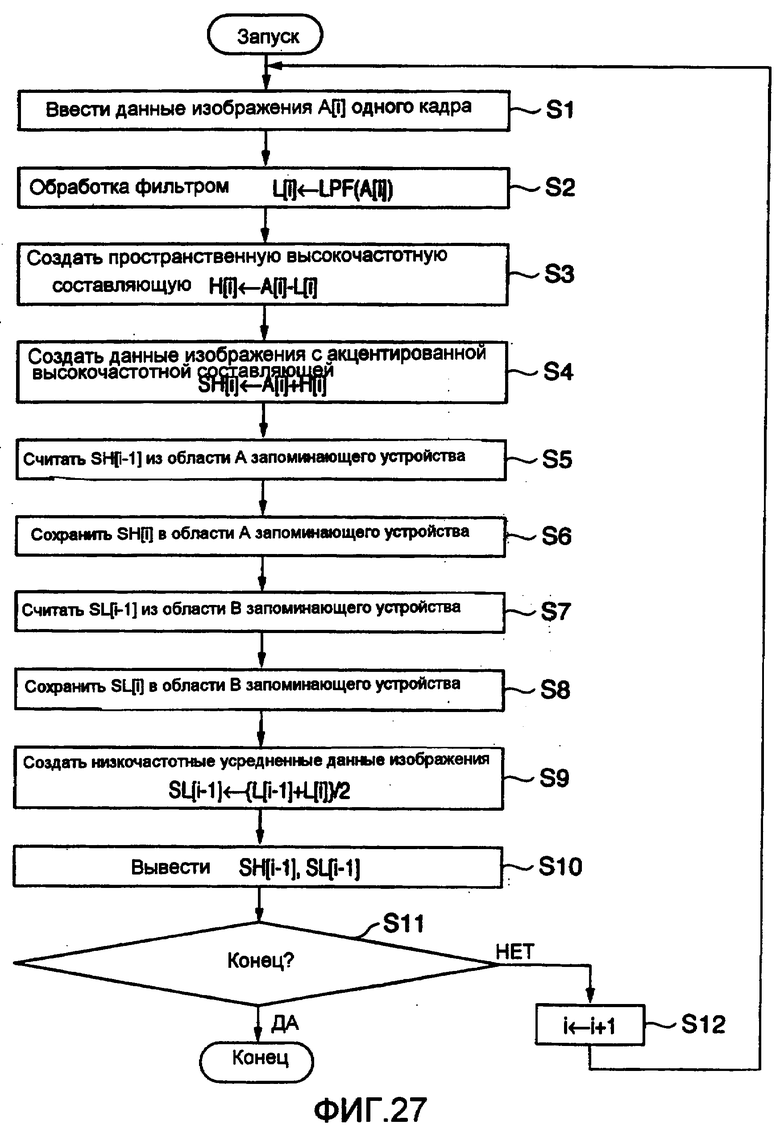

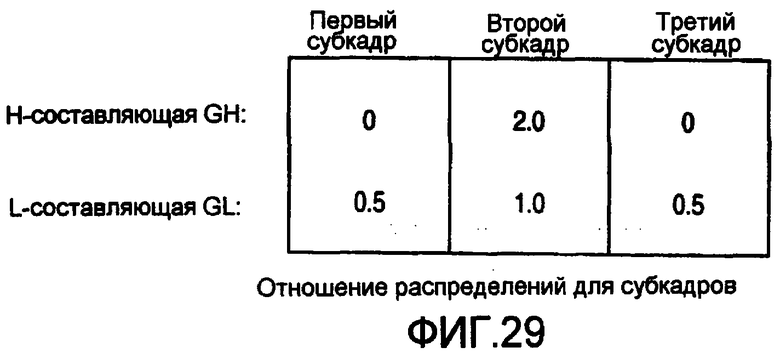

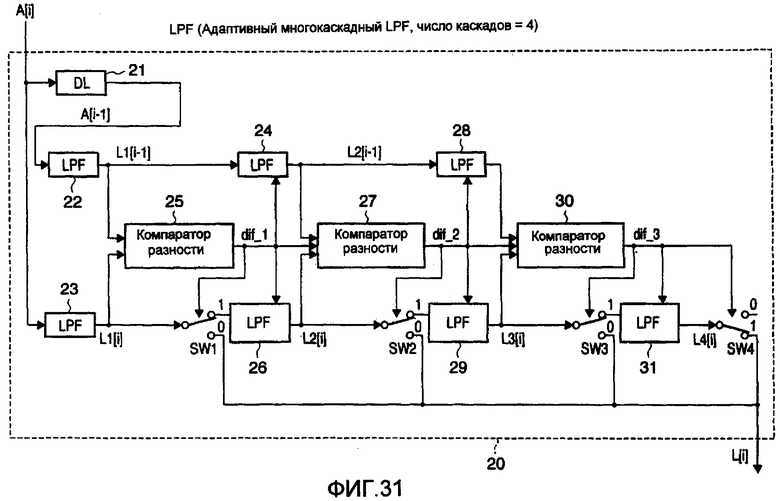
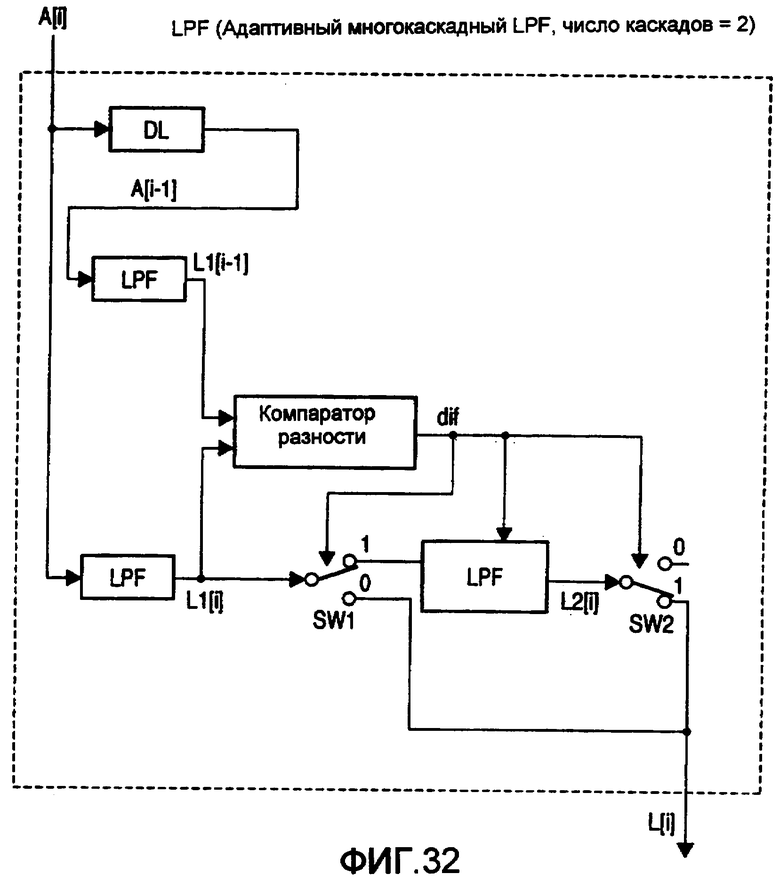
Изобретение относится к устройству обработки изображений для преобразования данных движущегося изображения, имеющего первую частоту кадров, в данные движущегося изображения, имеющего более высокую частоту кадров. Техническим результатом является снижение сложности обработки изображений и уменьшение размывания при движении в устройстве отображения удерживающего типа и уменьшение мерцания в устройстве отображения импульсного типа. Указанный результат достигается тем, что фильтр нижних частот (LPF) фильтрует кадр входных данных (A[i]) изображения, чтобы создать низкочастотные данные изображения. Вычитающее устройство и сумматор создают высокочастотные данные изображения. Другой сумматор суммирует низкочастотные данные изображения, поступающие от схемы задержки, с последующими низкочастотными данными изображения. Делитель делит сумму пополам для создания низкочастотных усредненных данных изображения. Переключатель поочередно выводит высокочастотные данные изображения и низкочастотные данные изображения всякий раз, когда вводится кадр данных изображения. В результате устройство может создавать выходные данные изображения, имеющие удвоенную частоту кадров данных входного изображения. 12 н. и 5 з.п. ф-лы, 32 ил.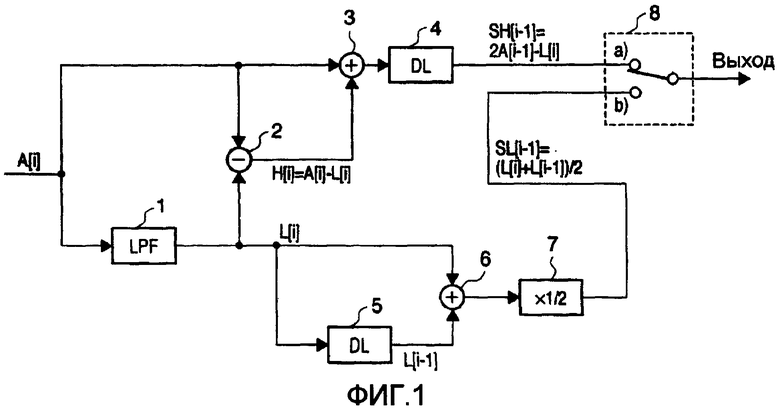
1. Устройство обработки изображений, выполненное с возможностью вывода данных движущегося изображения, введенных содержащими m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, содержащее:
блок фильтров, выполненный с возможностью разделения данных изображения интересующего входного кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
блок запоминающего устройства, выполненный с возможностью запоминания пространственной высокочастотной составляющей и пространственной низкочастотной составляющей данных изображения, полученных с помощью упомянутого блока фильтров;
блок считывания, выполненный с возможностью считывания пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения из упомянутого блока запоминающего устройства N раз;
блок умножения, выполненный с возможностью умножения пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются так, чтобы сделать временной центр тяжести пространственной высокочастотной составляющей данных изображения совпадающим с временным центром тяжести пространственной низкочастотной составляющей данных изображения и сделать временное распределение пространственной высокочастотной составляющей данных изображения меньшим, чем временное распределение пространственной низкочастотной составляющей данных изображения;
блок суммирования, выполненный с возможностью суммирования пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения после умножения упомянутым блоком умножения всякий раз, когда данные считываются; и
выходной блок, выполненный с возможностью вывода суммированных данных изображения, полученных от упомянутого блока суммирования.
2. Устройство обработки изображений, выполненное с возможностью приема входных данных движущегося изображения, содержащего m кадров в единицу времени, и вывода данных движущегося изображения, содержащего 2m кадров в единицу времени, содержащее:
приемный блок, выполненный с возможностью приема входных данных изображения каждого кадра;
блок фильтров, выполненный с возможностью разделения данных изображения интересующего входного кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
блок запоминающего устройства, выполненный с возможностью запоминания входных данных изображения, пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения;
вычислительный блок, выполненный с возможностью вычисления усредненных низкочастотных данных изображения, которые являются средним значением низкочастотной составляющей данных изображения входного кадра, соседствующего по времени с интересующим кадром, и низкочастотной составляющей данных изображения интересующего кадра, хранящегося в упомянутом блоке запоминающего устройства;
блок формирования, выполненный с возможностью формирования данных изображения с акцентированной высокочастотной составляющей на основе низкочастотной составляющей данных изображения и высокочастотной составляющей данных изображения; и
выходной блок, выполненный с возможностью вывода последовательно для каждого кадра данных изображения с акцентированной высокочастотной составляющей и данных изображения с усредненной низкочастотной составляющей, полученных с помощью упомянутого вычислительного блока.
3. Устройство по п.2, в котором упомянутый блок формирования выполнен с возможностью вычисления данных изображения с акцентированной высокочастотной составляющей SH[i], используя выражение SH[i]=L[i]+2·H[i], и упомянутый вычислительный блок выполнен с возможностью вычисления данных изображения с усредненной низкочастотной составляющей SL[i], используя выражение SL[i]={L[i]+L[i-l]}/2, где A[i] - данные изображения входного i-го интересующего кадра, L[i] - низкочастотная составляющая данных изображения, полученная из данных изображения A[i], и H[i] - высокочастотная составляющая данных изображения, полученная из данных изображения А[i].
4. Устройство по п.1, в котором упомянутый блок фильтров содержит: запоминающее устройство, выполненное с возможностью запоминания данных изображения для кадра, непосредственно предшествующего интересующему входному кадру; первый блок фильтров, содержащий множество фильтров, которые включены в последовательную цепочку, для данных изображения интересующего кадра, и чьи верхние предельные значения частотного диапазона, который должен фильтроваться, становятся меньше по мере удаления положения фильтра от входа цепочки; второй блок фильтров, содержащий множество фильтров, которые включены в последовательную цепочку, для данных изображения кадра, непосредственно предшествующего интересующему кадру, хранящемуся в упомянутом запоминающем устройстве, и чьи верхние предельные значения частотного диапазона, который должен фильтроваться, становятся меньше по мере удаления положения фильтра от входа цепочки; и блок, выполненный с возможностью вывода данных изображения, полученных n-м фильтром упомянутого первого блока фильтров, в качестве низкочастотной составляющей данных изображения интересующего кадра, когда абсолютное значение разности между данными изображения, полученными n-м фильтром упомянутого первого блока фильтров, и данными изображения, полученными n-м фильтром упомянутого второго блока фильтров, становятся равными или меньшими заранее заданного порогового значения Сn для первого раза.
5. Устройство по п.2, в котором упомянутый блок фильтров содержит: запоминающее устройство, выполненное с возможностью запоминания данных изображения для кадра, непосредственно предшествующего интересующему входному кадру; первый блок фильтров, содержащий множество фильтров, которые включены в последовательную цепочку, для данных изображения интересующего кадра, и чьи верхние предельные значения частотного диапазона, который должен фильтроваться, становятся меньше по мере удаления положения фильтра от входа цепочки; второй блок фильтров, содержащий множество фильтров, которые включены в последовательную цепочку, для данных изображения кадра, непосредственно предшествующего интересующему кадру, хранящемуся в упомянутом запоминающем устройстве, и чьи верхние предельные значения частотного диапазона, который должен фильтроваться, становятся меньше по мере удаления положения фильтра от входа цепочки; и блок, выполненный с возможностью вывода данных изображения, полученных с помощью n-го фильтра упомянутого первого блока фильтров, в качестве низкочастотной составляющей данных изображения интересующего кадра, когда абсолютное значение разности между данными изображения, полученными n-м фильтром упомянутого первого блока фильтров, и данными изображения, полученными n-м фильтром упомянутого второго блока фильтров, становится равным или меньшим заранее заданного порогового значения Сn для первого раза.
6. Устройство по п.4, в котором, если существует конкретная область, в которой абсолютное значение разности между данными изображения, полученными с помощью n-го фильтра упомянутого первого блока фильтров, и данными изображения, полученными с помощью n-го фильтра упомянутого второго блока фильтров, больше заранее заданного порогового значения Сn, то (n+1)-й фильтр упомянутого первого блока фильтров и (n+1)-й фильтр упомянутого второго блока фильтров выполняют процесс фильтрации для этой конкретной области.
7. Устройство по п.2, дополнительно содержащее корректирующий блок, выполненный с возможностью вычитать значение избыточной части из интересующего пиксела и прибавлять это значение избыточной части к пикселу в той же самой позиции, что и интересующий пиксел в низкочастотной составляющей данных изображения интересующего кадра, если значение пиксела интересующего пиксела данных изображения с акцентированной высокочастотной составляющей больше, чем верхнее предельное значение, допустимое для значения пиксела, и если значение пиксела интересующего пиксела данных изображения с акцентированной высокочастотной составляющей меньше, чем нижнее предельное значение, допустимое для значения пиксела, то устанавливать значение пиксела для интересующего пиксела на нижнее предельное значение и вычитать значение, необходимое для установки значения пиксела для интересующего пиксела на нижнее предельное значение, из значения пиксела в том же самом положении, что и интересующий пиксел в низкочастотных данных изображения, тем самым корректируя данные изображения с акцентированной высокочастотной составляющей и низкочастотные данные изображения, полученные упомянутым вычислительным блоком, при этом упомянутый выходной блок выводит данные изображения с акцентированной высокочастотной составляющей и низкочастотные данные изображения, которые скорректированы упомянутым корректирующим блоком.
8. Устройство обработки изображений, выполненное с возможностью вывода данных движущегося изображения, введенного содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, содержащее:
блок фильтров, выполненный с возможностью разделения входных данных движущегося изображения интересующего кадра на R (R≥2) составляющих данных изображения, соответствующих полосам пространственных частот;
блок запоминающего устройства, выполненный с возможностью запоминания R составляющих данных изображения, полученных упомянутым блоком фильтров;
блок считывания, выполненный с возможностью считывания R составляющих данных изображения из упомянутого блока запоминающего устройства N раз;
блок умножения, выполненный с возможностью умножения R составляющих данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются такими, чтобы сделать временные центры тяжести R составляющих данных изображения совпадающими и сделать временное распределение R составляющих данных изображения уменьшающимся при повышении пространственной частоты составляющей изображения;
блок суммирования, выполненный с возможностью суммирования R пространственных составляющих данных изображения, соответствующих полосам пространственных частот, после умножения упомянутым блоком умножения каждый раз, когда упомянутый блок считывания считывает R составляющих данных изображения, соответствующих полосам пространственных частот; и
выходной блок, который выводит суммированные данные изображения, полученные от упомянутого блока суммирования.
9. Устройство обработки изображений, выполненное с возможностью вывода данных движущегося изображения, введенного содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, содержащее:
блок фильтров, выполненный с возможностью разделения изображения интересующего кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
блок запоминающего устройства, выполненный с возможностью запоминания каждой пространственной частотной составляющей данных изображения, полученной с помощью упомянутого блока фильтров;
блок считывания, выполненный с возможностью считывания пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения из упомянутого блока запоминающего устройства N раз;
блок умножения, выполненный с возможностью умножения пространственной высокочастотной составляющей данных изображения и пространственной низкочастотной составляющей данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются такими, чтобы распределить низкочастотную составляющую данных изображения на число кадров, большее, чем для высокочастотной составляющей данных изображения;
блок суммирования, который суммирует пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения после умножения упомянутым блоком умножения каждый раз, когда упомянутый блок считывания считывает пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения; и
выходной блок, выполненный с возможностью вывода суммированных данных изображения, полученных от упомянутого блока суммирования.
10. Способ управления устройством обработки изображений, которое выводит данные движущегося изображения, введенного содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, причем способ содержит этапы, на которых:
разделяют изображение интересующего кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
запоминают каждую пространственную частотную составляющую данных изображения, полученную на этапе фильтрации, в блоке запоминающего устройства;
считывают пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения из блока запоминающего устройства N раз;
умножают пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются так, чтобы сделать временной центр тяжести пространственной высокочастотной составляющей данных изображения совпадающим с временным центром тяжести пространственной низкочастотной составляющей данных изображения и сделать временное распределение пространственной высокочастотной составляющей данных изображения меньшим, чем временное распределение пространственной низкочастотной составляющей данных изображения;
суммируют пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения после умножения каждый раз, когда считываются пространственная высокочастотная составляющая изображения и пространственная низкочастотная составляющая изображения; и
выводят данные изображения, суммированные на этапе суммирования.
11. Способ управления устройством обработки изображений, которое вводит данные движущегося изображения, содержащего m кадров в единицу времени, и выводит данные движущегося изображения, содержащего 2m кадров в единицу времени, причем способ содержит этапы, на которых:
вводят данные изображения каждого кадра;
разделяют данные изображения интересующего входного кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
запоминают низкочастотную составляющую данных изображения кадра, непосредственно предшествующего интересующему кадру, в блоке запоминающего устройства;
вычисляют среднее значение низкочастотных данных изображения, которое является усредненным значением низкочастотной составляющей данных изображения кадра, введенного вслед за интересующим кадром, полученной на этапе фильтрации, и низкочастотной составляющей данных изображения, запомненной в блоке запоминающего устройства; и
последовательно выводят для каждого кадра данные изображения с акцентированной высокочастотной составляющей, сформированной на основе низкочастотной составляющей данных изображения и высокочастотной составляющей данных изображения и среднего значения низкочастотных данных изображения.
12. Способ управления устройством обработки изображений, которое выводит данные движущегося изображения, введенного содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, причем способ содержит этапы, на которых:
разделяют входные данные движущегося изображения интересующего кадра на R (R≥2) составляющих данных изображения, соответствующих полосам пространственных частот;
запоминают R полученных составляющих данных изображения в блоке запоминающего устройства;
считывают R составляющих данных изображения из блока запоминающего устройства N раз;
умножают R составляющих данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются такими, чтобы сделать временные центры тяжести R составляющих данных изображения совпадающими и сделать временное распределение R составляющих данных изображения уменьшающимся при повышении пространственной частоты составляющей изображения;
суммируют R составляющих данных изображения, соответствующих полосам пространственных частот, после умножения каждый раз, когда считываются R составляющих данных изображения, соответствующих полосам пространственных частот; и
выводят суммированные данные изображения, полученные после суммирования.
13. Способ управления устройством обработки изображений, которое выводит данные движущегося изображения, введенного содержащим m кадров в единицу времени, в качестве выходных данных движущегося изображения, содержащего N×m (N≥2) кадров в единицу времени, причем способ содержит этапы, на которых:
разделяют входное изображение интересующего кадра на пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения;
запоминают каждую полученную пространственную частотную составляющую данных изображения в блоке запоминающего устройства;
считывают пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения из блока запоминающего устройства N раз;
умножают пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения на заранее заданные коэффициенты умножения, которые устанавливаются такими, чтобы распределить низкочастотную составляющую данных изображения на число кадров, большее, чем для высокочастотной составляющей данных изображения;
суммируют пространственную высокочастотную составляющую данных изображения и пространственную низкочастотную составляющую данных изображения после умножения каждый раз, когда считываются пространственная высокочастотная составляющая изображения и пространственная низкочастотная составляющая изображения; и
выводят суммированные данные изображения, полученные в результате суммирования.
14. Машиночитаемый носитель данных, на котором хранится программа, которая при загрузке в компьютер и исполнении предписывает компьютеру функционировать в качестве устройства обработки изображений по п.1.
15. Машиночитаемый носитель данных, на котором хранится программа, которая при загрузке в компьютер и исполнении предписывает компьютеру функционировать в качестве устройства обработки изображений по п.2.
16. Машиночитаемый носитель данных, на котором хранится программа, которая при загрузке в компьютер и исполнении предписывает компьютеру функционировать в качестве устройства обработки изображений по п.8.
17. Машиночитаемый носитель данных, на котором хранится программа, которая при загрузке в компьютер и исполнении предписывает компьютеру функционировать в качестве устройства обработки изображений по п.9.
| US 2006197732 A1, 07.09.2006 | |||
| US 2006256238 A1, 16.11.2006 | |||
| US 2006227249 A1, 12.10.2006 | |||
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 1998 |
|
RU2150146C1 |
| СПОСОБ НИЗКОШУМОВОГО КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ | 1997 |
|
RU2201654C2 |

