Изобретение относится к горному делу и может быть использовано при монтаже и в процессе эксплуатации поддерживающе-оградительных и оградительно-поддерживающих механизированных крепей очистных комплексов при отработке угольных пластов подземным способом.
Известен традиционный способ монтажа секций и эксплуатации механизированной крепи (Яцких В.Г., Спектор Л.А., Кучерявый А.Г. Машины и комплексы. Под ред. В.Г.Яцких. Учебник для техникумов. 5-е изд. Перераб. и доп. М.: Недра, 1984, с.223-226), включающий доставку секции в собранном виде в монтажную камеру, разворот секции крепи относительно забоя, присоединение секции крепи к уже смонтированной секции, раскрытие секции крепи, для чего перекрытие поднимают вверх и заводят верхнюю часть наклоненных к забою гидростоек в посадочные места поддерживающего или ограждающего элементов, при эксплуатации комплекса разгрузку гидростоек, передвижение секции крепи, распор гидростоек, передвижение забойного конвейера, поддержание пород кровли.
Недостатком известного способа является то, что все силы горного давления принимает на себя забой и горное давление идет по штрекам с опережением продвижения забоя до 40 м и более. Пласт угля сжимается, что приводит к вытеснению большого объема газа метана и создает взрывоопасные ситуации, увеличивая тем самым опасность труда шахтеров, а по забою идет отслоение угля (отжимов), что также увеличивает опасность труда. Расположение элементов секции крепи таково, что силы горного давления действуют на рабочую часть лавы, а не на ее завальную часть. Гидростойки крепи наклонены к забою, что при передвижении секции крепи приводит к поломке домкрата коррекции секции крепи и пенькового домкрата, разрыву сварочных швов на поддерживающем и ограждающем элементе, а следовательно, к снижению срока эксплуатации очистного комплекса, нежелательному контакту поддерживающего элемента секции крепи с рабочим органом комбайна (шнеком) в верхней части забоя при подрезке угля. Для исключения этого нежелательного контакта для передвижки линейной секции лавного привода в известном способе используют проставыш между линейной секцией лавного привода и домкратом передвижки. Для оградительно-поддерживающего типа секции крепи поддерживающий элемент опрокидывается при разгрузке секции, для устранения этого недостатка используют дополнительный элемент (косынку или гусак), усложняя тем самым конструкцию секции крепи. Известная схема расположения секций крепи никак не влияет на формирование купола в завальной части лавы в процессе обрушения основной кровли. В известном способе монтажа и эксплуатации секции крепи не контролируется обрушение в завальной части лавы и низкая скорость движения секции крепи к забою.
Задачи изобретения - повышение безопасности горных работ, повышение производительности труда, увеличение срока эксплуатации очистного комплекса, отсутствие нежелательного контакта рабочего органа очистного комбайна (шнеком) с поддерживающим элементом секции крепи, уменьшение суфлярного выделения газа метана.
Технический результат изобретения - повышение безопасности горных работ, повышение производительности труда, увеличение срока эксплуатации очистного комплекса, отсутствие нежелательного контакта рабочего органа очистного комбайна (шнеком) с поддерживающим элементом секции крепи, уменьшение суфлярного выделения газа метана.
Указанный технический результат достигается тем, что в способе монтажа секции механизированной крепи, включающем доставку секции в монтажную камеру в транспортном положении, при котором гидростойки сокращены, а их верхняя часть выведена из посадочного места поддерживающего или ограждающего элемента, разворот секции крепи относительно забоя, установку секции крепи в ряд к уже смонтированной секции, раскрытие секции крепи из транспортного положения, для чего поддерживающий элемент поднимают вверх, заводят верхнюю часть гидростоек в посадочные места поддерживающего или ограждающего элемента, а гидростойки наклоняют к забойному борту монтажной камеры, передвижку секции на забой, распирание секции крепи, при эксплуатации комплекса разгрузку гидростоек, передвижение секции крепи, распор гидростоек, передвижение забойного конвейера, поддержание пород кровли, согласно изобретению раскрытие поддерживающе-оградительной секции механизированной крепи из транспортного положения осуществляют путем взведения многозвенного механизма секции крепи, для чего завальную часть поддерживающего элемента и верхнюю часть ограждающего элемента размещают в верхнем углу завального борта монтажной камеры противоположно забойному борту монтажной камеры, а гидростойки наклоняют в сторону завального борта монтажной камеры.
Согласно второму варианту раскрытие оградительно-поддерживающей секции механизированной крепи из транспортного положения осуществляют путем взведения многозвенного механизма секции крепи, для чего оградительный элемент поднимают вверх, а основание с нижней частью гидростоек смещают на забой и верхнюю часть гидростоек устанавливают в посадочные места оградительного элемента и наклоняют на завальный борт, а поддерживающий элемент занимает положение, при котором он не будет терять контакт с кровлей лавы и опрокидываться.
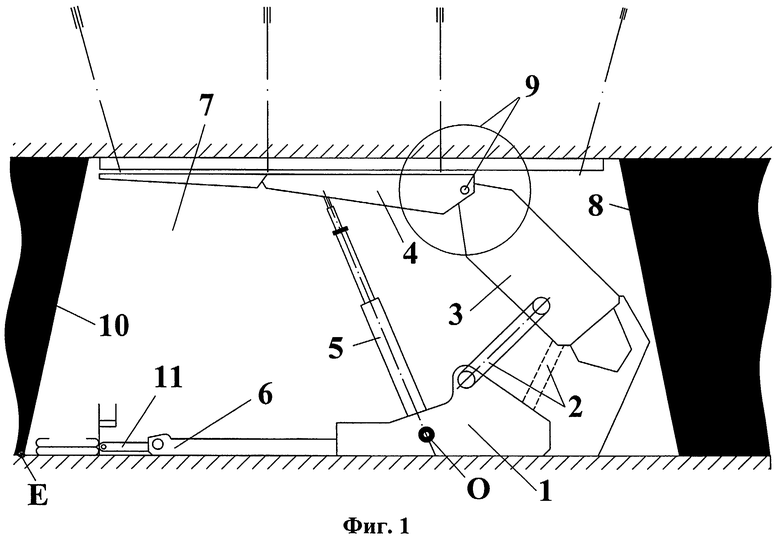
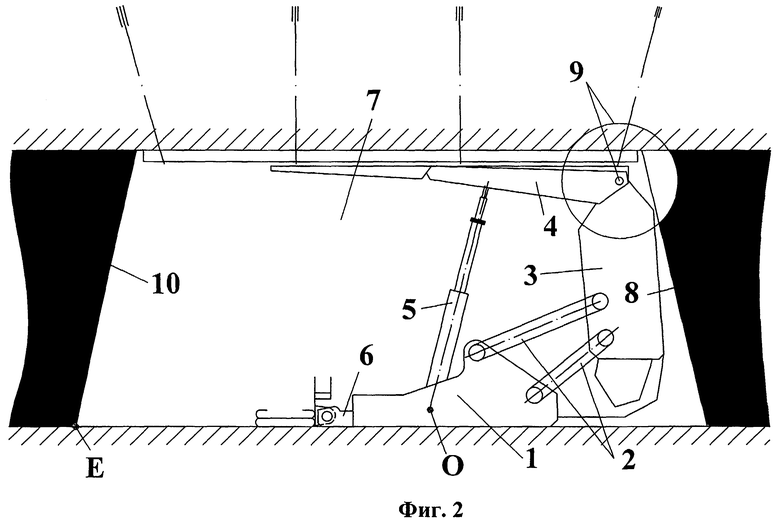
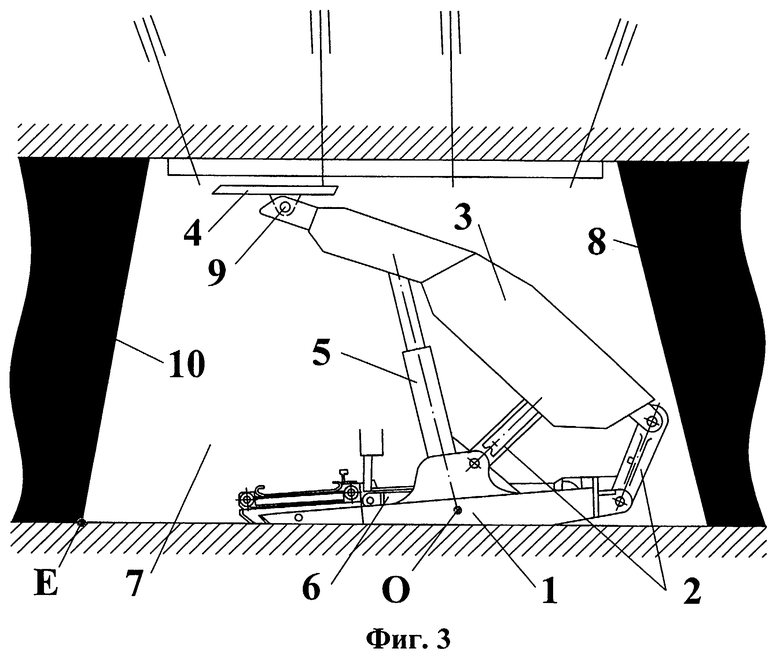
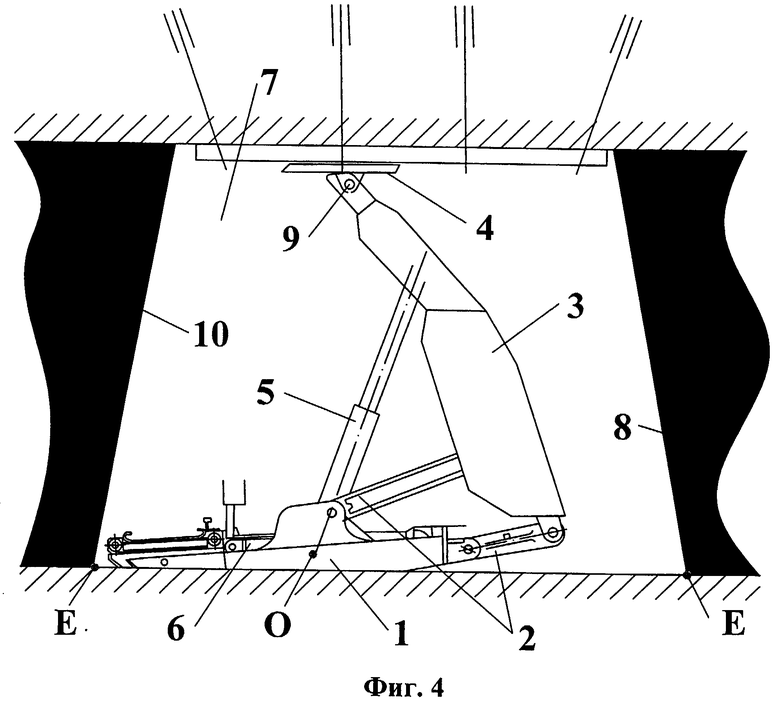
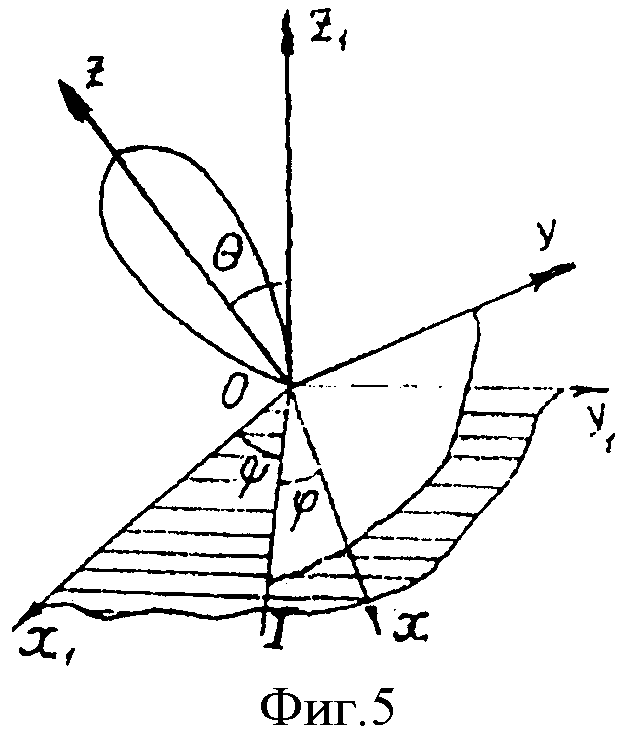
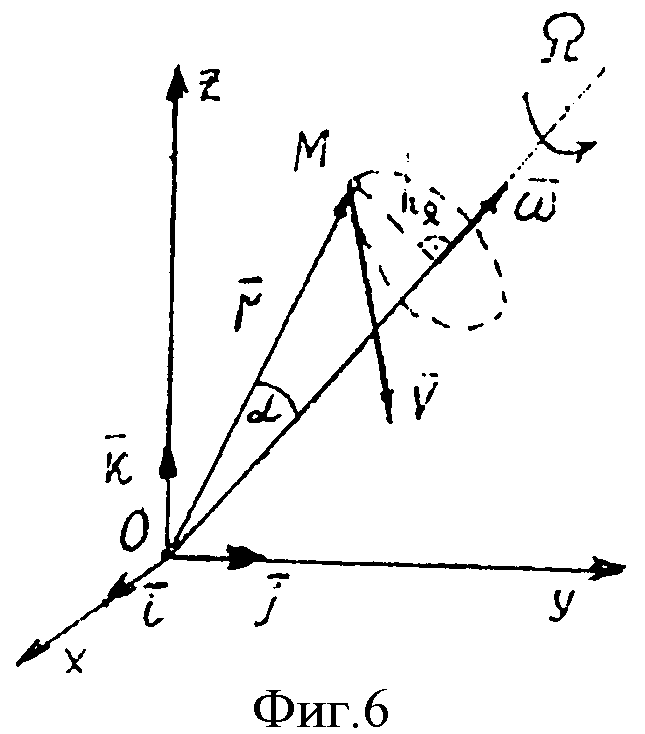
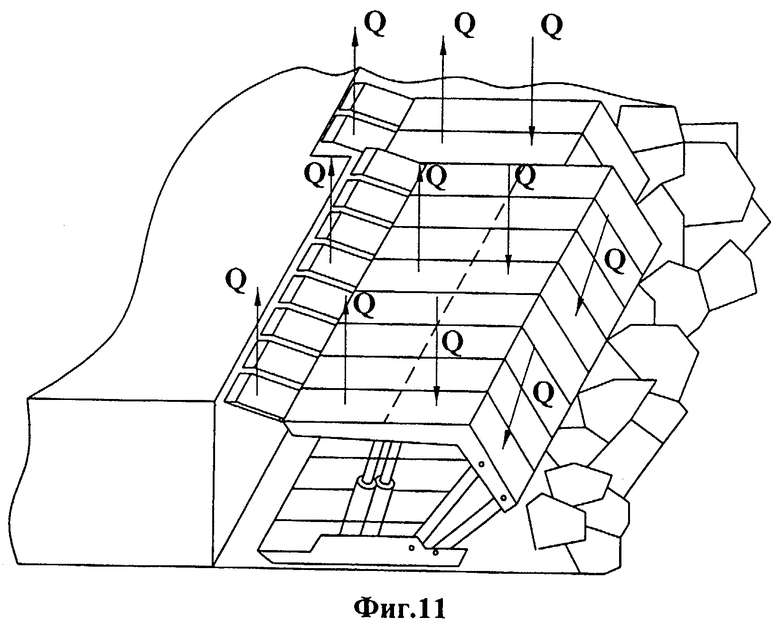
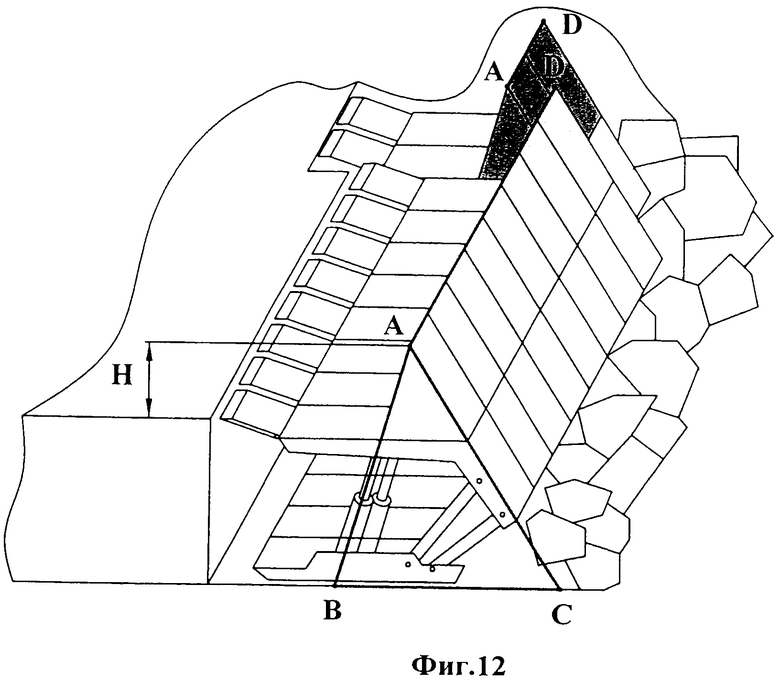
Изобретение поясняется чертежами, где на фиг.1 показано раскрытие поддерживающе-оградительной секции крепи известным способом; на фиг.2 показано раскрытие поддерживающе-оградительной секции крепи заявляемым способом; на фиг.3 показано раскрытие оградительно-поддерживающей секции крепи известным способом; на фиг.4 показано раскрытие оградительно-поддерживающей секции крепи заявляемым способом; на фиг.5 показаны углы Эйлера; на фиг.6 - вращение точки М вокруг мгновенной оси вращения; на фиг.7 - годограф вектора угловой скорости; на фиг.8 - положение любой точки М твердого тела согласно теореме Ривальса; на фиг.9 показаны принцип работы и расположение секции крепи в монтажной камере согласно теореме Ривальса применительно к заявляемому способу; на фиг.10 - распределение нагрузки в секции крепи лавы по известному способу; на фиг.11 - распределение нагрузки в секции крепи лавы по заявляемому способу; на фиг.12 показаны силовой треугольник ВАС и граница горного давления АД.
Секция крепи состоит (см. фиг.1) из основания 1, четырехзвенника 2, соединенных между собой ограждающего 3 и поддерживающего 4 элементов, гидростоек 5, гидродомкрата передвижения 6 - все эти элементы секции крепи представляют собой многозвенный механизм, который в заявляемом способе взводят в процессе раскрытия секции крепи.
Способ монтажа и эксплуатации секции механизированной крепи осуществляют следующим образом.
Для поддерживающе-оградительного типа крепи. Сначала осуществляют доставку секции в монтажную камеру 7 в собранном виде в транспортном положении. Затем разворачивают секцию крепи относительно забоя и ставят в ряд к уже смонтированной секции. После чего осуществляют раскрытие секции крепи путем взведения многозвенного механизма, для этого поддерживающий элемент 4 секции крепи поднимают вверх, завальную сторону поддерживающего элемента 4 и верхнюю часть ограждающего элемента 3 смещают в сторону завального борта 8 монтажной камеры 7, соединительный узел 9 между поддерживающим и ограждающим элементами размещают в верхнем углу завального борта 8 монтажной камеры 7. Гидростойки 5 устанавливают в посадочные места поддерживающего элемента 4, наклоняют их в сторону завального борта 8 монтажной камеры 7 противоположно забойному борту 10. Распирают секцию крепи. Домкрат передвижки лавного привода находится в сокращенном виде.
Для оградительно-поддерживающего типа крепи. Сначала осуществляют доставку секции в монтажную камеру 7 в собранном виде в транспортном положении. Затем разворачивают секцию крепи относительно забоя и ставят в ряд к уже смонтированной секции. После чего осуществляют раскрытие секции крепи, для этого оградительный элемент 3 поднимают вверх, а основание 1 с нижней частью гидростойки 5 смещают на забойный борт 10 монтажной камеры 7 и верхнюю часть гидростойки 5 устанавливают в посадочное место оградительного элемента 3, а поддерживающий элемент 4 автоматически занимает положение, при котором он не будет терять контакт с кровлей лавы и не опрокинется. Поддерживающий элемент при такой схеме расположения крепи никогда не опрокинется, не возникает необходимости в дополнительном элементе (гусаке или косынке), не произойдет отслоения угля от забоя (отжимов) и не будет надобности в противоотжимных козырьках.
В заявляемом способе расположение секции крепи обеих типов в монтажной камере лавы при монтаже и в процессе эксплуатации комплекса можно описать с помощью теоретической механики, глава «Кинематика твердого тела», раздел «Сферическое движение твердого тела» (Хямяляйнен В.А. Теоретическая механика. Учеб. пособие /В.А.Хямяляйнен, Р.Ф.Гордиенко, Н.А.Ведяшкина; Кузбасс, Гос. тех. ун-т. - Кемерово, 2001. - С.93-98). Согласно описанной в этом разделе теореме Ривальса ускорение любой точки твердого тела при сферическом движении равно геометрической сумме вращательного и осестремительного ускорений.
Сферическим движением твердого тела называется такое движение, при котором одна точка остается неподвижной.
Рассмотрим сферическое движение тела и введем в рассмотрение две системы отсчета: подвижную Oxyz, жестко связанную с твердым телом, и неподвижную Ox1y1z1 с началом в неподвижной точке О.
Линия OI пересечения неподвижной плоскости x1Oy1 с подвижной хОу называется линией узлов (фиг.5).
Положение тела, очевидно, однозначно определяется заданием трех независимых углов Эйлера: φ - собственного вращения; ψ - прецессии; θ - нутации.
Уравнения сферического движения можно представить в виде углов Эйлера как функции времени:

Определим положение произвольной точки тела М относительно подвижной системы отсчета Oxyz радиусом-вектором (фиг.6):
В процессе движения твердого тела координаты х, у, z остаются постоянными, а единичные векторы, оставаясь постоянными по модулю, будут изменять свое направление. Тогда для скорости точки получим следующее выражение:
Проекцию скорости на ось х можно записать в виде

Из равенства  следует
следует  а из равенства
а из равенства  следует
следует  , откуда
, откуда 
Подставляя в выражение (4), получим:
Путем циклической перестановки находим остальные проекции:

Введем формально вектор ω с проекциями.

Тогда проекции скорости на оси координат подвижной системы отсчета можно представить в виде

а сам вектор скорости точки запишем следующим образом:
Таким образом, скорость точки определяем такой же формулой, что и в случае вращения твердого тела вокруг неподвижной оси. При этом введенный нами вектор  играет роль угловой скорости тела. Формулы (8) показывают, что проекции вектора являются функциями времени, и поэтому вектор
играет роль угловой скорости тела. Формулы (8) показывают, что проекции вектора являются функциями времени, и поэтому вектор  вообще говоря, будет менять со временем не только свою величину, но и ориентацию относительно тела.
вообще говоря, будет менять со временем не только свою величину, но и ориентацию относительно тела.
Поэтому  называется мгновенной угловой скоростью тела, ось, вдоль которой он направлен в данный момент, - мгновенной осью вращения тела.
называется мгновенной угловой скоростью тела, ось, вдоль которой он направлен в данный момент, - мгновенной осью вращения тела.
Уравнение мгновенной оси вращения можно найти как уравнение геометрического места точек, скорости которых в данный момент времен равны нулю. Полагая в формулах (8) Vx=Vy=Vz=0, получим

Из (10) следует, что мгновенная ось вращения есть прямая, проходящая через начало координат, то есть через неподвижную точку тела (фиг.6).
Вектор скорости  направлен по касательной к окружности радиусом hΩ, по которой в данный момент точка вращается вместе с телом вокруг мгновенной оси вращения Ω (фиг.6). Величину скорости определяем по формуле
направлен по касательной к окружности радиусом hΩ, по которой в данный момент точка вращается вместе с телом вокруг мгновенной оси вращения Ω (фиг.6). Величину скорости определяем по формуле

В процессе движения твердого тела положение мгновенной оси вращения непрерывно меняется, и она описывает коническую поверхность с вершиной в точке О.
Геометрическое место последовательных положений мгновенной оси вращения называется аксоидом (соответственно подвижным и неподвижным относительно подвижной и неподвижной систем отсчета).
Точки тела, лежащие на мгновенной оси вращения, не имеют скорости. Вращение же тела вокруг этой оси вызывает и вращение подвижного аксоида. Поэтому сферическое движение тела можно представить как качение без скольжения подвижного аксоида по неподвижному.
По аналогии с вращательным движением угловое ускорение при сферическом движении определяем по формуле
При сферическом движении меняется не только модуль, но и направление угловой скорости.
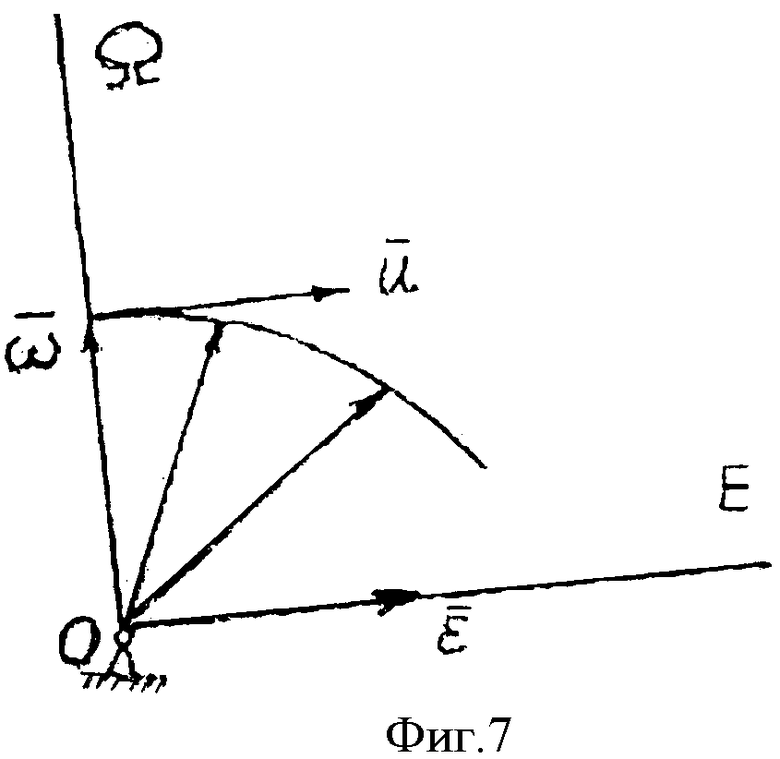
Поэтому из (12) следует, что прямые, вдоль которых направлены векторы ω и ε, различны (фиг.7).
Прямая ОЕ, по которой направлен вектор  называется осью углового ускорения. Откладывая от неподвижной точки О векторы
называется осью углового ускорения. Откладывая от неподвижной точки О векторы  соответствующие ряду последовательных моментов времени, и соединяя концы этих векторов, получим годограф вектора угловой скорости (фиг.7). Скорость точки, описывающей годограф, равна
соответствующие ряду последовательных моментов времени, и соединяя концы этих векторов, получим годограф вектора угловой скорости (фиг.7). Скорость точки, описывающей годограф, равна
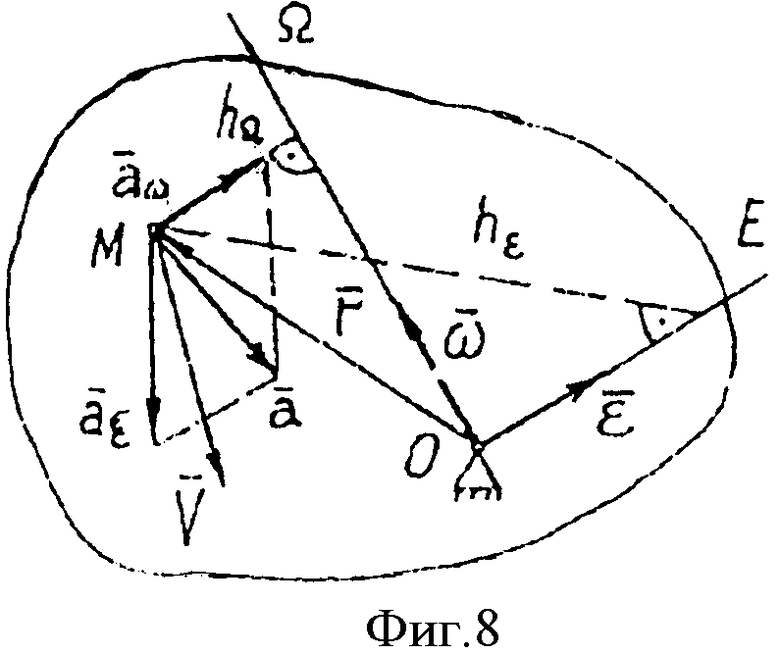
Теорема Ривальса. Ускорение любой точки твердого тела при сферическом движении равно геометрической сумме вращательного и осестремительного ускорений.
Определим положение любой точки М твердого тела радиусом-вектором  (фиг.8).
(фиг.8).
Тогда скорость точки согласно формуле (9)
а ускорение

где  - вращательное ускорение;
- вращательное ускорение;  - осестремительное ускорение.
- осестремительное ускорение.
Величины ускорений  и
и  определяем по формулам:
определяем по формулам:

Векторы  и
и  не перпендикулярны друг к другу, поэтому модуль полного ускорения точки определим как длину диагонали параллелограмма, построенного на этих векторах, по формуле
не перпендикулярны друг к другу, поэтому модуль полного ускорения точки определим как длину диагонали параллелограмма, построенного на этих векторах, по формуле

Из (17) как частный случай следует формула для определения модуля полного ускорения точки при вращении твердого тела вокруг неподвижной оси. Действительно, положив  получим
получим 
Рассмотрим общий случай движения свободного твердого тела, то есть тела, имеющего шесть степеней свободы. По аналогии с плоскопараллельным движением можно показать, что в общем случае движение можно разложить на два: поступательное вместе с полюсом и сферическое вокруг полюса.
Тогда уравнения движения представим в виде совокупности уравнений поступательного движения (уравнения движения полюса А) и сферического движения (углы Эйлера φ, ψ, θ как функции времени):
xA=xA(t); yA=yA(t); zA=zA(t); ψ=ψ(t)

а скорость V и ускорение а любой точки тела запишем, соответственно, в следующем виде:


где 
 - соответственно скорость и ускорение полюса А,
- соответственно скорость и ускорение полюса А, 
 - соответственно угловая скорость и угловое ускорение при сферическом движении относительно полюса;
- соответственно угловая скорость и угловое ускорение при сферическом движении относительно полюса; 
 - соответственно вращательное и осестремительное ускорения;
- соответственно вращательное и осестремительное ускорения;  - радиус-вектор точки относительно полюса А.
- радиус-вектор точки относительно полюса А.
Можно также показать, что угловая скорость  и угловое ускорение
и угловое ускорение  свободного твердого тела являются свободными векторами, то есть сферическое движение не зависит от выбора полюса.
свободного твердого тела являются свободными векторами, то есть сферическое движение не зависит от выбора полюса.
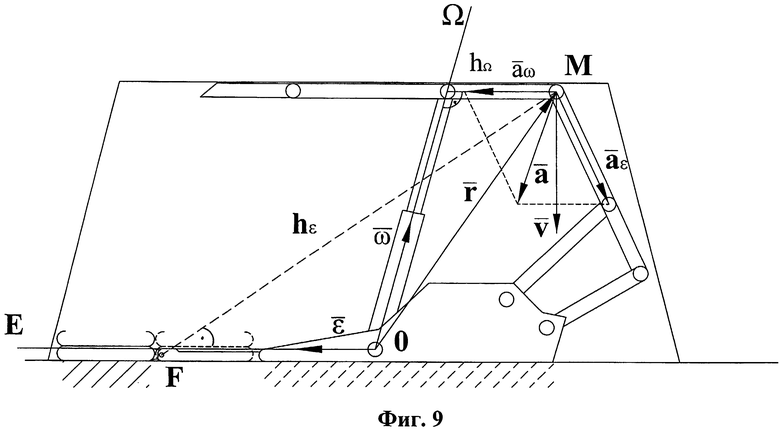
Применительно к заявляемому способу монтажа и эксплуатации механизированной секции крепи теорема Ривальса неопровержимо доказывает работоспособность заявляемого способа.
В заявляемом способе монтажа секции крепи подвижным аксоидом является гидростойка, а неподвижным и скользящим - основание секции крепи.
Точки тела, лежащие на мгновенной оси вращения, не имеют скорости. Вращение же тела вокруг этой оси вызывает и вращение подвижного аксоида. Поэтому сферическое движение тела можно представить как качение без скольжения подвижного аксоида по неподвижному.
Годографом в заявляемом способе будет являться поддерживающий элемент 4, ограждающий элемент 3 и четырехзвенник 2 секции крепи, подвижным аксоидом - гидростойки 5 секции крепи, неподвижным и скользящим аксоидом - основание 1 секции крепи и линейная секция лавного привода, скользящие по прямой ОЕ (фиг.2, фиг.4). На этой прямой расположены домкрат передвижения 6 секции крепи и линейная секция лавного привода. Исходя из этого подвижный аксоид берет начало в точке О. В этой точке домкрат передвижения 6 секции крепи соединен с линейной секцией лавного привода. Как только скользящий аксоид - основание секции крепи, остановился в точке О, домкрат передвижки сократился, скользящий аксоид стал неподвижным. В процессе передвижения секции крепи подвижный аксоид (гидростойки) и годограф (поддерживающий и ограждающий элементы) расклинит в кровлю, произойдет распирание секции крепи (см. фиг.2, фиг.4).
В процессе эксплуатации секции крепи поддерживающе-оградительного типа при отработке угольного пласта комплексом при передвижке секции крепи к забою в первую очередь сокращают гидростойки, при этом завальная часть ограждающего элемента с четырехзвенником опускается и угол между ними сокращается. Забойная часть поддерживающего элемента не теряет контакта с кровлей. После передвижки секции крепи к забою гидростойки выдвигают, секцию распирают и поддерживающий элемент имеет полный контакт с кровлей лавы, при этом мощность лавы (это высота по забою) будет одинакова с мощностью по завалу за гидростойками в завальной части секции крепи. Если в процессе эксплуатации лавы пласт угля потерял свою мощность, то в этом случае управляют домкратом коррекции: домкрат коррекции выдвигают и секция будет удлиняться по завалу. При распоре секции крепи домкрат коррекции будет оставаться в том положении, в каком его выдвинули, и гидростойки не будут его рвать. Завальная часть основания секции крепи не будет задираться, а будет иметь полный контакт с почвой лавы.
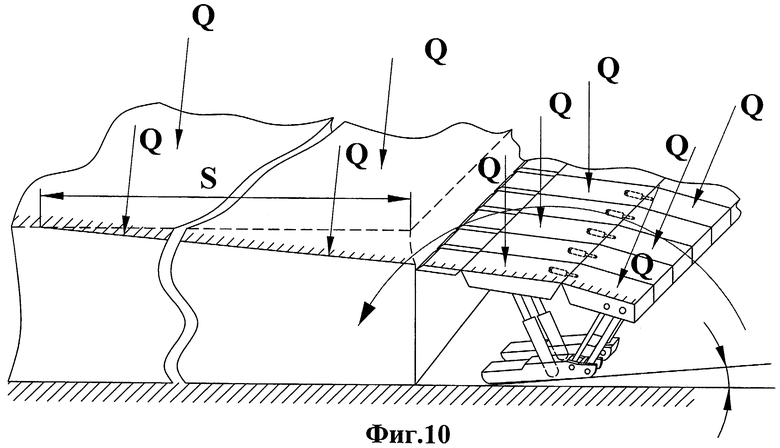
На фиг.11 показано, как будут принимать на себя нагрузку горного давления секции крепи в лаве. Поддерживающе-оградительные секции могут быть однорядные (секции, которые имеют две гидростойки) или двухрядные (секции, которые имеют четыре гидростойки). На фиг.11 показаны однорядные секции крепи. Ряд гидростоек четко разграничивает лаву на завальную и рабочую зоны, что видно на фиг.11. Гидростойки и поддерживающий элемент согласно теореме Ривальса никогда не будут перпендикулярны относительно друг друга и не наклонятся на забой лавы. В верхней части забоя при подрезке угля не будет контакта между поддерживающим элементом секции крепи с рабочим органом комбайна (шнеком). И не будет необходимости в установке проставыша 11 (фиг.1).
Заявляемый способ образно можно сравнить с револьверным пистолетом. Барабан револьвера сначала заряжают патронами, так же, как в заявляемом способе, механизированную крепь заряжают в монтажной камере. Многозвенный механизм каждой секции крепи механизированного комплекса взводят подобно барабанно-курковому револьверному механизму. При выстреле из револьвера боек бьет по капсюлю в патроне, взрывается порох, пуля вылетает из ствола пистолета, барабан прокручивается и курковой механизм автоматически взводится. Револьвер готов к следующему выстрелу и будет стрелять и перезаряжаться до тех пор, пока все патроны не закончатся. Так же и в заявляемом способе, когда весь комплекс механизированной крепи полностью зарядили: каждую секцию крепи взвели, установили комбайн и лавный привод, подготовили транспортную цепочку для транспортирования угля на поверхность, тогда лаву запускают в работу. Комбайн, который подрезает уголь, можно образно сравнить с патроном, а стружку угля с пулей. Вслед за комбайном осуществляют передвижку секций крепи, эту передвижку можно сравнить с курковым механизмом. Для того чтобы секцию передвинуть, ее разгружают, гидростойки опускаются, и основание крепи передвигают к линейной секции лавного привода. В то же время поддерживающий и оградительный элементы с гидростойками и четырехзвенником расклинят и произойдет распирание секции крепи. Гидростойки и поддерживающий элемент никогда не будут перпендикулярны относительно друг друга согласно теореме Ривальса, и они не наклонятся на забой лавы. Произошел повторный взвод многозвенного механизма. Секция крепи опять находится во взведенном состоянии и готова к передвижке. Так происходит, пока не закончится столб лавы, как патроны в барабане револьвера. Затем комплекс заводят в демонтажную камеру, а секция крепи будет оставаться во взведенном состоянии, пока ее не демонтируют в транспортное положение.
В процессе эксплуатации лавы, при обрушении породы, горное давление будет принимать на себя силовой треугольник ВАС (фиг.12), образованный силой давления гидростоек (сторона ВА этого треугольника), силой Q горного давления (сторона АС) и почвой лавы (сторона ВС). Такой силовой треугольник образуется в каждой секции крепи. Вершины силовых треугольников секций крепи, установленных в лаве в ряд, образуют линию АД, которая является границей горного давления.
Горное давление будет принимать на себя не забой, а этот треугольник ВАС и держать на границе горного давления в кровле лавы выше перекрытия на расстоянии Н, равном от 2,5 до 10 м в зависимости от мощности пласта (фиг.11). Безопасность труда повышается за счет контроля обрушения в завальной части лавы за счет сопротивления образующегося силового треугольника. При этом купол формируют за счет давления гидростоек и действия силового треугольника крепи, а не за счет продвижения забоя, как в известном способе. Заявляемый способ исключает контакт рабочего органа комбайна с поддерживающим элементом, и в проставыше между линейной секцией лавного привода и домкратом передвижки секции крепи нет необходимости.
За счет того что горное давление воздействует на завальную часть крепи при передвижке к забою, в заявляемом способе увеличивается скорость движения секции крепи. За счет правильного распределения нагрузок в сварочных швах и в посадочных местах перекрытия увеличивается срок эксплуатации комплекса.
В заявляемом способе подрезку угля можно вести как обычным способом (односторонне), так и челночным способом.
Выемочные работы - подрезка угля комбайном - по заявляемому способу будут вестись в целике, отрабатываемый пласт угля не будет принимать давление в забойной части лавы. Опережение горного давления по штрекам не будет происходить за счет того, что граница горного давления находится на линии вершин силовых треугольников. Это позволяет повысить производительность труда.
Заявляемый способ может быть использован для поддерживающе-оградительного и оградительно-поддерживающего типа крепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ НОВОГО ТИПА: ПОДВИЖНЫЙ ГИДРАВЛИЧЕСКИЙ КЛАПАН В БОКОВЫХ ПОРОДАХ И ЗАМОК В КАПСУЛЕ ТЕРМОДИНАМИЧЕСКОГО БАЛАНСА | 2013 |
|
RU2546689C1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2010 |
|
RU2432464C1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |
| СЕКЦИЯ ТРАНСФОРМЕР МЕХАНИЗИРОВАННОЙ КРЕПИ ИЗ ПОДДЕРЖИВАЮЩЕ-ОГРАДИТЕЛЬНОГО В ОГРАДИТЕЛЬНЫЙ ТИП И НАОБОРОТ | 2011 |
|
RU2464423C2 |
| Концевая секция механизированной крепи | 1986 |
|
SU1421874A1 |
| Механизированная крепь сопряжения для двухслоевой выемки | 1980 |
|
SU972120A1 |
| Механизированная шагающая комплектная крепь | 1985 |
|
SU1434121A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ РАЗРАБОТКИ МОЩНЫХ КРУТОПАДАЮЩИХ МЕСТОРОЖДЕНИЙ | 2003 |
|
RU2253018C2 |
| Механизированная крепь сопряжения | 1985 |
|
SU1295000A1 |
| СПОСОБ РАЗРАБОТКИ МОЩНОГО ПОЛОГОГО ПЛАСТА С ВЫПУСКОМ УГЛЯ ПОДКРОВЕЛЬНОЙ ТОЛЩИ И МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2763205C1 |
Изобретение относится к горному делу, а именно к способу монтажа и эксплуатации поддерживающе-оградительных и оградительно-поддерживающих механизированных крепей очистных комплексов при отработке угольных пластов подземным способом. Техническим результатом является повышение безопасности горных работ, повышение производительности труда, увеличение срока эксплуатации очистного комплекса, отсутствие нежелательного контакта рабочего органа очистного комбайна с поддерживающим элементом секции крепи, уменьшение суфлярного выделения газа метана. Способ монтажа и эксплуатации поддерживающе-оградительной секции механизированной крепи включает доставку секции в монтажную камеру в транспортном положении, при котором гидростойки сокращены, а их верхняя часть выведена из посадочного места поддерживающего элемента, разворот секции крепи относительно забоя, установку секции крепи в ряд к уже смонтированной секции, раскрытие секции крепи из транспортного положения, для чего поддерживающий элемент поднимают вверх, заводят верхнюю часть гидростоек в посадочные места поддерживающего элемента, передвижку секции на забой, распирание секции крепи. Раскрытие поддерживающе-оградительной секции механизированной крепи из транспортного положения осуществляют путем ее взведения, для чего завальную часть поддерживающего элемента и верхнюю часть ограждающего элемента смещают в сторону завального борта монтажной камеры, соединительный узел между поддерживающим и ограждающим элементами размещают в верхнем углу завального борта монтажной камеры, а гидростойки наклоняют в сторону завального борта монтажной камеры. Также предложен способ монтажа и эксплуатации оградительно-поддерживающих секций механизированных крепей. 2 н.п. ф-лы, 12 ил.
1. Способ монтажа и эксплуатации поддерживающе-оградительной секции механизированной крепи, включающий доставку секции в монтажную камеру в транспортном положении, при котором гидростойки сокращены, а их верхняя часть выведена из посадочного места поддерживающего элемента, разворот секции крепи относительно забоя, установку секции крепи в ряд к уже смонтированной секции, раскрытие секции крепи из транспортного положения, для чего поддерживающий элемент поднимают вверх, заводят верхнюю часть гидростоек в посадочные места поддерживающего элемента, передвижку секции на забой, распирание секции крепи, отличающийся тем, что раскрытие поддерживающе-оградительной секции механизированной крепи из транспортного положения осуществляют путем ее взведения, для чего завальную часть поддерживающего элемента и верхнюю часть ограждающего элемента смещают в сторону завального борта монтажной камеры, соединительный узел между поддерживающим и ограждающим элементами размещают в верхнем углу завального борта монтажной камеры, а гидростойки наклоняют в сторону завального борта монтажной камеры.
2. Способ монтажа и эксплуатации оградительно-поддерживающей секции механизированной крепи, включающий доставку секции в монтажную камеру в транспортном положении, при котором гидростойки сокращены, а их верхняя часть выведена из посадочного места ограждающего элемента, разворот секции крепи относительно забоя, установку секции крепи в ряд к уже смонтированной секции, раскрытие секции крепи из транспортного положения, для чего ограждающий элемент поднимают вверх, заводят верхнюю часть гидростоек в посадочные места ограждающего элемента, передвижку секции на забой, распирание секции крепи, отличающийся тем, что основание с нижней частью гидростойки смещают на забойный борт и верхнюю часть гидростойки устанавливают в посадочное место ограждающего элемента, при этом поддерживающий элемент занимает положение, при котором он не будет терять контакт с кровлей лавы и опрокидываться.
| ЯЦКИХ В.Г | |||
| и др | |||
| Горные машины и комплексы | |||
| - М.: Недра, 1984, с.223-226 | |||
| Секция механизированной крепи | 1977 |
|
SU642485A1 |
| Ограждение секции механизированной крепи | 1982 |
|
SU1010285A2 |
| Ограждение механизированной крепи | 1988 |
|
SU1525279A1 |
| Способ управления кровлей в очистном забое с механизированной крепью | 1988 |
|
SU1671888A1 |
| СПОСОБ ВЗАИМОДЕЙСТВИЯ СЕКЦИИ КРЕПИ С БОКОВЫМИ ПОРОДАМИ | 1990 |
|
RU2028452C1 |
| КАРБОКСАМИДЫ, СПОСОБ ИХ ПОЛУЧЕНИЯ И ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ | 1995 |
|
RU2163232C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОЩАДИ ЛИСТЬЕВ У ДРЕВЕСНЫХ РАСТЕНИЙ | 2011 |
|
RU2466351C1 |

